常用坐标系之间的关系与转换
地心地固系和东北天坐标系的速度坐标转换关系
地心地固系和东北天坐标系的速度坐标转换关系1. 引言地球上的物体运动可以通过不同的坐标系来描述。
在天文学中,常用的两个坐标系是地心地固系和东北天坐标系。
地心地固系是以地球质心为原点建立的,它是一个惯性坐标系,不随时间变化。
而东北天坐标系则是以观测者所在位置为原点建立的,它随着观测者的运动而变化。
当我们需要在这两个坐标系之间进行速度坐标转换时,就需要了解它们之间的关系。
本文将详细介绍地心地固系和东北天坐标系之间的速度坐标转换关系。
2. 地心地固系2.1 坐标定义地心地固系是以地球质心为原点建立的一个惯性坐标系。
其三个轴分别定义如下:•X轴:指向本初子午线方向,与赤道平面相交于XZ平面。
•Y轴:与X轴垂直,并指向东方。
•Z轴:与X、Y轴构成右手直角坐标系。
2.2 速度表示在地心地固系中,一个物体的速度可以用三个分量表示:Vx、Vy和Vz。
其中,Vx表示物体在X轴方向上的速度分量,Vy表示物体在Y轴方向上的速度分量,Vz表示物体在Z轴方向上的速度分量。
3. 东北天坐标系3.1 坐标定义东北天坐标系是以观测者所在位置为原点建立的一个局部坐标系。
其三个轴分别定义如下:•N轴:指向地理北极,与水平面垂直。
•E轴:与N轴构成右手直角坐标系,并指向东方。
•U轴:与N、E轴构成右手直角坐标系,并指向天空。
3.2 速度表示在东北天坐标系中,一个物体的速度也可以用三个分量表示:Vn、Ve和Vu。
其中,Vn表示物体在N轴方向上的速度分量,Ve表示物体在E轴方向上的速度分量,Vu表示物体在U轴方向上的速度分量。
4. 地心地固系到东北天坐标系的转换关系通过了解地心地固系和东北天坐标系各自的定义和特点,我们可以推导出它们之间的速度坐标转换关系。
4.1 转换矩阵地心地固系到东北天坐标系的转换可以通过一个3x3的旋转矩阵来表示,记作R。
该矩阵的每个元素可以表示为:R = [cosλ*cosφ, -sinλ, -cosλ*sinφ][sinλ*cosφ, cosλ, -sinλ*sinφ][ sinφ , 0 , cosφ ]其中,λ表示观测者所在位置的经度,φ表示观测者所在位置的纬度。
空间大地坐标系及平面直角坐标系转换公式

§2.3.1 坐标系的分类正如前面所提及的,所谓坐标系指的是描述空间位置的表达形式,即采用什么方法来表示空间位置。
人们为了描述空间位置,采用了多种方法,从而也产生了不同的坐标系,如直角坐标系、极坐标系等。
在测量中常用的坐标系有以下几种:一、空间直角坐标系空间直角坐标系的坐标系原点位于参考椭球的中心,Z 轴指向参考椭球的北极,X 轴指向起始子午面与赤道的交点,Y 轴位于赤道面上且按右手系与X 轴呈90°夹角。
某点在空间中的坐标可用该点在此坐标系的各个坐标轴上的投影来表示。
空间直角坐标系可用图2-3来表示:图2-3 空间直角坐标系二、空间大地坐标系空间大地坐标系是采用大地经、纬度和大地高来描述空间位置的。
纬度是空间的点与参考椭球面的法线与赤道面的夹角;经度是空间中的点与参考椭球的自转轴所在的面与参考椭球的起始子午面的夹角;大地高是空间点沿参考椭球的法线方向到参考椭球面的距离。
空间大地坐标系可用图2-4来表示:图2-4空间大地坐标系三、平面直角坐标系平面直角坐标系是利用投影变换,将空间坐标空间直角坐标或空间大地坐标通过某种数学变换映射到平面上,这种变换又称为投影变换。
投影变换的方法有很多,如横轴墨卡托投影、UTM 投影、兰勃特投影等。
在我XX 用的是高斯-克吕格投影也称为高斯投影。
UTM 投影和高斯投影都是横轴墨卡托投影的特例,只是投影的个别参数不同而已。
高斯投影是一种横轴、椭圆柱面、等角投影。
从几何意义上讲,是一种横轴椭圆柱正切投影。
如图左侧所示,设想有一个椭圆柱面横套在椭球外面,并与某一子午线相切〔此子午线称为中央子午线或轴子午线〕,椭球轴的中心轴CC ’通过椭球中心而与地轴垂直。
高斯投影满足以下两个条件:1、 它是正形投影;2、 中央子午线投影后应为x 轴,且长度保持不变。
将中央子午线东西各一定经差〔一般为6度或3度〕X 围内的地区投影到椭圆柱面上,再将此柱面沿某一棱线展开,便构成了高斯平面直角坐标系,如以下图2-5右侧所示。
常用坐标系之间的关系与转换
7.5 常用坐标系之间的关系与转换一、大地坐标系和空间大地直角坐标系及其关系大地坐标系用大地纬度企丈地经度L 和丈地髙H 来表示点的位置°这种坐标系是经 典大地测量甬:両用座标紊7屜据地图投影的理论,大地坐标系可以通过一定的投影转 化为投影平面上的直角坐标系,为地形测图和工程测量提供控制基础。
同时,这种坐标系 还是研究地球形状和大小的 种有用坐标系°所以大地坐标系在大地测量中始终有着重要 的作用.空间大地直角坐标系是-种以地球质心为原点购亘墮®坐标系,一般用X 、化Z 表 示点BSSTSTT 逐碇SS 範菇飞両H 绕禎扭转冻其轨道平面随时通过 地球质心。
对它们的跟踪观测也以地球质心为坐标原点,所以空间大地直角坐标系是卫星 大地测量中一种常用的基本坐标系。
现今,利用卫星大地测量的手段*可以迅速地测定点的空间大地直角坐拯,广泛应用于导航定位等空间技术。
同时经过数学变换,还可求岀点 的大地坐标I 用以加强和扩展地面大地网,进行岛屿和洲际联测,使传统的大地测量方法 发生了深刻的变化,所以空间大地宜角坐标系对现今大地测量的发展’具有重要的意义。
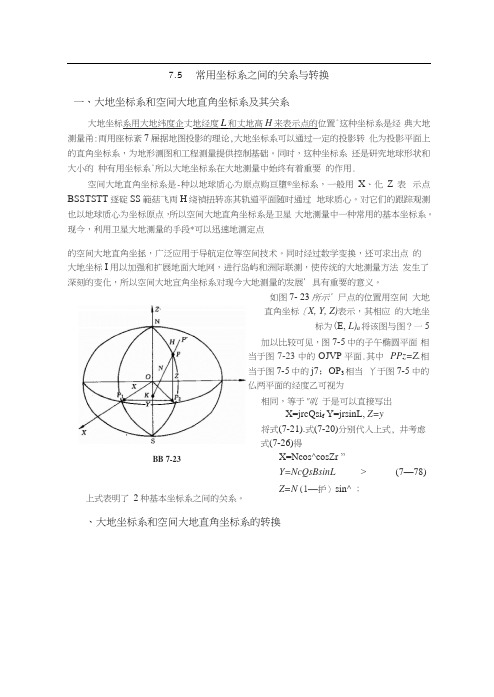
、大地坐标系和空间大地直角坐标系的转换如图7- 23所示’尸点的位置用空间 大地直角坐标〔X, Y, Z)表示,其相应 的大地坐标为(E, L)a 将该图与图?一5上式表明了 2种基本坐标系之间的关系。
加以比较可见,图7-5中的子午椭圆平面 相当于图7-23中的OJVP 平面.其中 PPz=Z.相当于图7-5中的j7;OP 3相当 丫于图7-5中的仏两平面的经度乙可视为相同,等于"叽 于是可以直接写岀X=jrcQsi f Y=jrsinL, Z=y将式(7-21).式(7-20)分别代入上式, 井考虑式(7-26)得X=Ncos^cosZr ”Y =NcQsBsinL > (7—78)Z=N (1—护〉sin^ ;BB 7-231.由大地坐标求空间大地直角坐标当已知椭球面上任一点P 的大地坐标(B, L)时,可以按式(7-78)直接求该点的 空间大地直角坐标(X, Y, Z)。
讲坐标系第极坐标和直角坐标的互化
04
极坐标与直角坐标的互化
极坐标与直角坐标的转换公式
极坐标系中的位置由两个角度和半径确定,其中角度以极轴为0度,顺时针增加角度,而半径从极轴的 长度开始。
直角坐标系中,点的位置由x和y坐标确定,其中x轴沿水平方向,y轴沿垂直方向。
极坐标与直角坐标之间的转换公式为:x = rcos(θ),y = rsin(θ),其中(r, θ)为极坐标系中的坐标,(x, y) 为直角坐标系中的坐标。
03
直角坐标系
直角坐标系的基本概念
定义
01
直角坐标系是一个二维坐标系统,其中点被定义为一对数值,
称为坐标。
坐标轴
02
在直角坐标系中,垂直相交的两条数轴称为坐标轴。
象限
03
在直角坐标系中,将平面分为四个象限,每个象限都包括一个
坐标轴和原点。
直角坐标系中的点和弧长
点
在直角坐标系中,每个点都有一个唯一 的坐标值,可以通过水平和垂直轴上的 刻度来测量。
在极坐标系中,一条曲线可以由其上面的一系列点来定义,这些点满足某个极坐标方程。弧长可以由这些点的极 径和极角计算出来。
极坐标系中的曲线方程
极坐标系中的曲线方程
在极坐标系中,曲线的形状由极径和极角的函数关系来定义,这种函数关系就是曲线在该坐标系下的 方程。
常见的极坐标系中的曲线方程
例如,圆形、椭圆形、心形等曲线的极坐标方程都有各自的形式。
03
极坐标系和直角坐标系之间的 转换是一个非常重要的数学技 能,也是解决许多实际问题的 基础。
课程知识点概述
极坐标系与直角坐标系之间的转换公式 极坐标系与直角坐标系在实际问题中的应用
极坐标系与直角坐标系的定义和性质
如何使用转换公式进行极坐标系与直角坐标系之间的转 换
各种坐标系的关系

WGS84经纬度坐标与北京54坐标或者西安80坐标的关系一般来讲,GPS直接提供的坐标(B,L,H)是1984年世界大地坐标系(Word Geodetic System1984即WGS-84)的坐标,其中B为纬度,L为经度,H为大地高即是到WGS-84椭球面的高度。
而在实际应用中,我国地图采用的是1954北京坐标系或者1980西安坐标系下的高斯投影坐标(x,y,),不过也有一些电子地图采用1954北京坐标系或者1980西安坐标系下的经纬度坐标(B,L),高程一般为海拔高度h。
GPS的测量结果与我国的54系或80系坐标相差几十米至一百多米,随区域不同,差别也不同,经粗落统计,我国西部相差70米左右,东北部140米左右,南部75米左右,中部45米左右。
1、1984世界大地坐标系WGS-84坐标系是美国国防部研制确定的大地坐标系,是一种协议地球坐标系。
定义是:原点是地球的质心,空间直角坐标系的Z轴指向BIH(1984.0)定义的地极(CTP)方向,即国际协议原点CIO,它由IAU和IUGG共同推荐。
X轴指向BIH定义的零度子午面和CTP 赤道的交点,Y轴和Z,X轴构成右手坐标系。
WGS-84椭球采用国际大地测量与地球物理联合会第17届大会测量常数推荐值,采用的两个常用基本几何参数:长半轴a=6378137m;扁率f=1:298.257223563。
2、1954北京坐标系1954北京坐标系是将我国大地控制网与前苏联1942年普尔科沃大地坐标系相联结后建立的我国大地坐标系。
属于参心大地坐标系,采用了前苏联的克拉索夫斯基椭球体。
其长半轴 a=6378245,扁率f=1/298.3。
1954年北京坐标系虽然是苏联1942年坐标系的延伸,但不能说它们完全相同。
3、1980西安坐标系1978年,我国决定建立新的国家大地坐标系统,并且在新的大地坐标系统中进行全国天文大地网的整体平差,这个坐标系统定名为1980年西安坐标系。
直角坐标与球坐标的转换详解

直角坐标与球坐标的转换详解有些同学只注意公式的表达式,而忽略了他们的意义和他们之间的关系。
因而经常出现错误而不自觉。
下面就把直角坐标与球坐标的意义与他们之间的关系细述如下:1.正确认识坐标系:通常使用的直角坐标系是右手坐标系,其x,y,z三个坐标轴之间的关系如下图所示:与之相对的不常用的是左手坐标系如下右图:在立体图中经常画成如下两种形式而右侧的第三种形式则较少被用到(因为它的第一卦限不在最前方):对于球坐标则更复杂一些:首先一定要注意两个互相垂直的角的定义域和初始方向:两个角一般都用θ和φ来表示。
比如θ的定义域是2π,相当于地球的经度,一定要辨明所使用的球坐标的θ是从(0→2π)还是从(-π→π)。
而φ的定义域是π,相当于地球的纬度,一定要辨明所用坐标系的φ是从(0→π)还是从(-π/2→π/2)。
所谓初始方向,是指球坐标与直角坐标之间的关系。
如下图所示:从上面两图可以看出θ角围成一圈,其取值可以是(0→2π)也可以是(-π→π),且把地球分割成一个个的西瓜瓣。
而φ角把地球切成一片片。
其取值只能从南极到北极即(0→π)或(-π/2→π/2),且图⑴只能取(-π/2→π/2),而图⑵只能取(0→π)。
所以虽然从理论上来说,常把φ的取值范围取(0→π),但地球图都采取图⑴的方式。
正是由于φ的两种不同的取值方式决定了球坐标与直角坐标之间的转换的不同表达式。
下面就以图1的方式配以适当的直角坐标系产生标准的地球图如下:其两种坐标的关系如右图:2.将球坐标转化为直角坐标:从图中可以看出在此图的关系中θ的变化实在x-y 平面内。
其0点为A 方向与x 轴方向一致。
向右为正,经过y 轴为π/2达到x 的负方向时为π,如果定义域为(0→2π)则继续旋转时θ值继续增大,否则变负。
这有什么重要性?它直接关系到从直角坐标系转换到球坐标系时的结果的正确性。
同样可以看到此图中φ的0点也与x 轴的方向一致为A 。
而且向上为正。
国家坐标系与地方独立坐标系坐标转换方法与计算
国家坐标系与地方独立坐标系坐标转换方法与计算国家坐标系与地方独立坐标系是地理信息系统中常用的两种坐标系统。
国家坐标系是一种基于国家统一测量实施的坐标系,用于整个国家范围内的测量和定位。
而地方独立坐标系是一种基于地方特定测量实施的坐标系,用于一些特定的地方范围内的测量和定位。
本文将介绍国家坐标系到地方独立坐标系的坐标转换方法和计算过程。
1.坐标转换方法:参数法是通过确定一组坐标转换参数来进行坐标转换的方法。
这些参数包括平移参数、旋转参数和尺度参数。
平移参数用于将其中一点的国家坐标系坐标转换到地方独立坐标系下的坐标;旋转参数用于调整坐标系之间的旋转关系;尺度参数用于调整坐标系之间的尺度关系。
点法是通过确定一组共同控制点的坐标,在这些点上进行观测,然后通过最小二乘法来计算坐标转换的参数。
这种方法适用于国家坐标系和地方独立坐标系之间的坐标转换精度要求较高的情况。
2.坐标转换计算过程:坐标转换的计算过程可以分为以下几步:Step 1:确定共同控制点首先,需要确定国家坐标系和地方独立坐标系之间存在共同的控制点。
这些控制点必须在两个坐标系下均已知其坐标。
Step 2:建立转换模型根据参数法或点法的选择,建立坐标转换的数学模型。
根据模型选择合适的坐标转换参数,包括平移参数、旋转参数和尺度参数。
Step 3:观测控制点在共同控制点上进行测量或观测,得到它们在国家坐标系和地方独立坐标系下的坐标值。
Step 4:计算转换参数根据观测得到的控制点坐标,利用最小二乘法或其他适用的计算方法,计算坐标转换的参数。
Step 5:坐标转换对于任意一点的国家坐标系坐标,根据转换参数,可以通过计算得到该点在地方独立坐标系下的坐标。
3.注意事项:在进行坐标转换时,需要注意以下事项:-坐标转换的精度:坐标转换的精度要求取决于具体应用的需求。
对于高精度测量和定位,需要使用更精确的参数和方法。
-坐标转换的准确性:坐标转换的准确性取决于共同控制点的准确性,因此在选择共同控制点时需要考虑控制点的可靠性和密度。
椭球面上的常用坐标系及其相互关系

§6.2 椭球面上的常用坐标系及其相互关系6.2.1大地坐标系 P 点的子午面NPS 与起始子午面NGS 所构成的二面角L ,叫做P 点的大地经度,由起始子午面起算,向东为正,叫东经(0°~180°),向西为负,叫西经(0o~180°)。
P 点的法线Pn 与赤道面的夹角B ,叫做P 点的大地纬度。
由赤道面起算,向北为正,叫北纬(0°~90°);向南为负,叫南纬(0°~90°)。
大地坐标系是用大地经度L 、大地纬度B 和大地高H 表示地面点位的。
过地面点P 的子午面与起始子午面间的夹角叫P 点的大地经度。
由起始子午面起算,向东为正,叫东经(0°~180°),向西为负,叫西经(0°~-180°)。
过P 点的椭球法线与赤道面的夹角叫P 点的大地纬度。
由赤道面起算,向北为正,叫北纬(0°~90°),向南为负,叫南纬(0°~-90°)。
从地面点P 沿椭球法线到椭球面的距离叫大地高。
大地坐标坐标系中,P 点的位置用L ,B 表示。
如果点不在椭球面上,表示点的位置除L ,B 外,还要附加另一参数——大地高H ,它同正常高正常H 及正高正H 有如下关系 ⎪⎭⎪⎬⎫+=+=)()(大地水准面差距高程异常正正常N H H H H ζ6.2.2空间直角坐标系以椭球体中心O 为原点,起始子午面与赤道面交线为X 轴,在赤道面上与X 轴正交的方向为Y 轴,椭球体的旋转轴为Z 轴,构成右手坐标系O -XYZ ,在该坐标系中,P 点的位置用Z Y X ,,表示。
地球空间直角坐标系的坐标原点位于地球质心(地心坐标系)或参考椭球中心(参心坐标系),z 轴指向地球北极,x 轴指向起始子午面与地球赤道的交点,y 轴垂直于XOZ 面并构成右手坐标系。
6.2.3子午面直角坐标系设P 点的大地经度为L ,在过P 点的子午面上,以子午圈椭圆中心为原点,建立y x ,平面直角坐标系。
直角坐标系 极坐标系转化

直角坐标系极坐标系转化(原创版)目录1.直角坐标系与极坐标系的定义与表示2.直角坐标系与极坐标系的转换关系3.实际应用中的转换示例正文一、直角坐标系与极坐标系的定义与表示直角坐标系,又称笛卡尔坐标系,是由两条互相垂直的数轴组成的平面坐标系。
通常,水平的数轴称为 x 轴,垂直的数轴称为 y 轴。
在直角坐标系中,一个点的位置由其在 x 轴和 y 轴上的坐标值(x, y)来表示。
极坐标系是一种平面坐标系,其基于一个固定点(极点)和一个固定方向(极轴)。
在极坐标系中,一个点的位置由其到极点的距离(半径)和与极轴的夹角来表示,通常记作(r, θ)。
二、直角坐标系与极坐标系的转换关系直角坐标系与极坐标系之间的转换关系可以通过以下公式表示:x = r * cos(θ)y = r * sin(θ)其中,r 表示点到极点的距离,θ表示与极轴的夹角。
从直角坐标系转换到极坐标系时,我们需要先计算半径 r,然后计算角度θ。
计算公式如下:r = √(x^2 + y^2)θ = arctan(y / x)从极坐标系转换到直角坐标系时,我们只需要将公式 x = r * cos(θ)和 y = r * sin(θ) 代入即可。
三、实际应用中的转换示例在实际应用中,直角坐标系与极坐标系的转换常常用于解决一些复杂数学问题,例如在物理学、工程学和计算机图形学等领域。
例如,在计算机图形学中,我们需要将极坐标下的图像转换为直角坐标,以便进行一些图像处理操作。
总结:直角坐标系与极坐标系是平面坐标系的两种表示方法,它们之间的转换关系可以通过公式 x = r * cos(θ) 和 y = r * sin(θ) 来表示。
enu坐标系和xyz坐标系的对应关系
ENU坐标系和XYZ坐标系是空间中常用的两种坐标系,它们分别用于描述不同的方向性和空间关系。
对于工程建模、导航和飞行控制等领域,了解它们的对应关系十分重要。
1. ENU坐标系概述ENU坐标系是一种东北天坐标系,也称为本地坐标系。
其中E代表东(East),N代表北(North),U代表天(Up)。
在ENU坐标系中,X轴指向东方,Y轴指向北方,Z轴指向天空。
这种坐标系常用于描述飞行器的运动状态和导航位置,其坐标原点一般设定为起飞点。
2. XYZ坐标系概述XYZ坐标系是一个惯性坐标系,也称为地球坐标系或世界坐标系。
其中X轴指向赤道上的经度为零的点,Y轴指向赤道上的经度90度的点,Z轴指向地球自转轴的北极。
这种坐标系常用于工程建模、计算机图形学和机器人技术中,描述物体的位置和运动。
3. ENU坐标系与XYZ坐标系的对应关系为了在不同坐标系间进行转换和配准,需要了解ENU坐标系和XYZ坐标系的对应关系。
具体来说,可以通过以下方式进行对应:- ENU坐标系的X轴对应XYZ坐标系的Y轴- ENU坐标系的Y轴对应XYZ坐标系的X轴- ENU坐标系的Z轴对应XYZ坐标系的-Z轴4. 应用举例在飞行器导航与控制中,常常需要将GPS坐标(一般为XYZ坐标系下的)转换为ENU坐标系下的坐标,以便进行准确的定位和路径规划。
另外,在工程建模中,有时也需要将地理坐标转换为局部坐标系以便进行精细化的建模和分析。
总结:ENU坐标系和XYZ坐标系是空间中常用的两种坐标系,它们分别用于描述不同的方向性和空间关系。
对于飞行器导航与控制、工程建模和其他相关领域,了解它们的对应关系具有重要意义。
希望通过本文的介绍,读者能够对这两种坐标系有更进一步的了解,并能够在实际应用中灵活运用。
在飞行器导航和控制中,对于ENU坐标系和XYZ坐标系的对应关系有着重要的应用。
在现代航空领域,飞行器需要准确地进行定位和导航,ENU坐标系的对应关系就成了十分关键的一环。
常用坐标系及其变换

§2-2 常用坐标系及其变换坐标系的定义:坐标系是量测物体的质心或质点在空间的相对位置,以及物体在空间的相对方位所使用的基准线组。
引入坐标系的目的:1 确切地描述飞行器的运动状态。
2 研究飞行器运动参数的变化规律。
1 惯性坐标系定义:一、常用坐标系的定义¾近程导弹飞行力学中,忽略地球的自转和公转,将与地球固连的坐标系看作惯性坐标系。
¾远程导弹飞行力学中,应考虑地球自转,将以地心为原点,坐标轴不随地球自转而转动的坐标系看作惯性坐标系。
在空间位置不变或作直线运动的坐标系。
实际应用时应注意的问题:2 直角坐标系定义:又称“笛卡儿坐标系”,轴线互相垂直的坐标系。
原点:发射点(发射飞行器时的惯性中心上)地面坐标系()轴:指向任何方向,通常取指向目标的方向。
轴:轴:d ddOXY Z O d OY d OX d OZ 与轴垂直,并位于过O 点的铅垂面内,指向上方。
d OX 与、轴垂直并组成右手坐标系。
dOX d OY特点:固连于地球表面,随地球一起转动可以看作惯性系。
由于有翼导弹飞行距离小、飞行时间短,因此可以把地球看作静止的,并把地球表面看作平面,此时可以将地面系看作惯性系。
对于近程导弹来说,可以认为重力与Y轴平行,方向相反。
地面,取包含发射点的水平面或称切平面。
基准面:目的:决定飞行器重心移动的规律、空间的姿态、导弹速度方向。
原点:导弹的质心。
弹体坐标系()轴:沿纵轴,指向头部为正。
轴:轴:111OX Y Z O 1OY 1OX 1OZ 与轴垂直,并位于纵向对称平面内,指向上方为正。
1OX 弹体纵向对成平面垂直,并与、轴组成右手坐标系。
1OX 1OY特点:与弹体固连,相对于弹体不动;动坐标系。
目的:决定导弹相对于地面坐标系的姿态;把导弹旋转运动方程投影到该坐标系上,可以使方程式简单清晰。
导弹气动力矩三个分量沿此系分解;常用于研究导弹的稳定性和操纵性。
原点:导弹的质心。
弹道固连系()轴:与飞行速度方向一致。
三维坐标与二维坐标的转换关系
三维坐标与二维坐标的转换关系一、引言在几何学和数学中,坐标系是用来表示和测量空间中的点的一种工具。
在三维空间中,我们通常使用三维坐标系来描述点的位置。
然而,在某些情况下,我们可能需要将三维坐标转换为二维坐标,或者将二维坐标转换为三维坐标。
本文将探讨三维坐标与二维坐标之间的转换关系。
二、三维坐标系三维坐标系由三个坐标轴组成,通常表示为(x, y, z)。
其中,x轴表示左右方向,y轴表示前后方向,z轴表示上下方向。
每个坐标轴上的点都是实数,可以是正数、负数或零。
通过这三个坐标轴,我们可以精确地确定三维空间中的任何点的位置。
三、二维坐标系二维坐标系由两个坐标轴组成,通常表示为(x, y)。
其中,x轴表示水平方向,y轴表示垂直方向。
与三维坐标系类似,每个坐标轴上的点都是实数。
二维坐标系常用于平面几何的表示和计算。
四、三维坐标到二维坐标的转换1. 投影法将三维坐标点投影到一个平面上,得到对应的二维坐标。
这个平面可以是水平的地面,也可以是垂直于某个坐标轴的平面。
投影法的基本原理是将三维坐标点的x、y、z分量分别映射到二维坐标系的x、y分量。
例如,将三维坐标点(x, y, z)投影到xoy平面上,得到对应的二维坐标(x, y)。
2. 透视投影透视投影是一种常用的三维到二维坐标转换方法,常用于计算机图形学和计算机游戏中。
透视投影通过模拟人眼观察物体时的视角和远近关系,将三维坐标点投影到一个平面上。
透视投影可以产生立体感和真实感,使得图像更加逼真。
五、二维坐标到三维坐标的转换1. 提升法将二维坐标点提升到一个平面上,得到对应的三维坐标。
这个平面可以是水平的地面,也可以是垂直于某个坐标轴的平面。
提升法的基本原理是将二维坐标点的x、y分量分别映射到三维坐标系的x、y分量,同时将z分量设定为一个固定值。
例如,将二维坐标点(x, y)提升到xoy平面上,得到对应的三维坐标(x, y, z),其中z为固定值。
2. 逆透视投影逆透视投影是透视投影的逆过程,将二维坐标点逆向投影到三维空间中。
世界坐标系怎么转换

世界坐标系怎么转换背景介绍在计算机图形学和计算机视觉领域中,世界坐标系的转换是一个非常常见的问题。
世界坐标系用于描述物体在三维空间中的位置和方向,在不同的应用中可能需要将物体从一个坐标系转换到另一个坐标系。
本文将介绍世界坐标系转换的基本原理和常用的转换方法。
世界坐标系和本地坐标系首先,我们需要了解世界坐标系和本地坐标系的概念。
•世界坐标系:世界坐标系是一个全局的坐标系统,用于描述物体在三维空间中的位置。
通常情况下,世界坐标系是固定不变的,所有的物体都相对于它来描述位置和方向。
•本地坐标系:本地坐标系是相对于世界坐标系而言的,并且可以是任意的坐标系。
通常情况下,一个物体会有一个本地坐标系,用于描述它自身的位置和方向。
本地坐标系的原点通常是物体的中心,可以选择物体的某个点作为原点。
世界坐标系转换的基本原理当我们需要在不同的坐标系之间进行转换时,需要考虑两个坐标系的相对关系,即如何定位一个坐标系相对于另一个坐标系的位置和方向。
世界坐标系转换的基本原理可以通过矩阵变换来实现。
矩阵变换是一种常用的坐标系转换方法,可以通过一个矩阵将一个坐标系的坐标转换为另一个坐标系的坐标。
坐标系转换的常用方法在世界坐标系转换中,常见的方法有平移、旋转和缩放。
下面我们将分别介绍这些方法的实现原理。
•平移:平移是将一个坐标系沿着某个方向移动一定的距离。
平移的结果是将原坐标系的原点相对于世界坐标系移动到了新的位置。
平移可以通过在矩阵中添加平移向量来实现。
•旋转:旋转是将一个坐标系绕着某个轴进行旋转。
旋转的结果是改变了坐标系的方向。
旋转可以通过在矩阵中添加旋转矩阵来实现。
旋转矩阵可以根据旋转的轴和旋转的角度计算得出。
•缩放:缩放是改变一个坐标系在各个轴上的大小。
缩放的结果是改变了坐标系的尺寸。
缩放可以通过在矩阵中添加缩放矩阵来实现。
缩放矩阵可以根据缩放的比例计算得出。
示例假设我们有一个三维物体,它在世界坐标系和本地坐标系下的坐标分别为(x,y,z)和(x′,y′,z′),我们希望将物体从本地坐标系转换到世界坐标系。
地磁坐标系和地理坐标系换算关系

地磁坐标系和地理坐标系换算关系地磁坐标系和地理坐标系是两种不同的坐标系统,用于描述地球上的位置和方向。
它们在地理和导航领域中起着重要的作用。
本文将深入探讨地磁坐标系和地理坐标系之间的换算关系,并分享对这两个坐标系的理解和观点。
1. 地磁坐标系(Geomagnetic Coordinate System)地磁坐标系是一种以地球磁场为基础的坐标系统,用于描述地球上的位置和方向。
它主要用于研究地球磁场、磁层物理、空间天气等领域。
地磁坐标系通常由地磁纬度、地磁经度和地磁高度三个参数表示。
地磁纬度(Geomagnetic Latitude)是指任意点在地磁赤道平面上的纬度角度,以地磁赤道为0度。
地磁经度(Geomagnetic Longitude)是指从地磁北极到该点的线与地磁子午面的夹角。
地磁高度(Geomagnetic Altitude)是指该点相对于地磁赤道的高度。
2. 地理坐标系(Geographic Coordinate System)地理坐标系是一种以地球自转轴和地球表面为基础的坐标系统,用于描述地球上的位置和方向。
它是一种经度-纬度坐标系统,可以精确定位地球表面上的任意一点。
地理坐标系通常由纬度、经度和海拔三个参数表示。
纬度(Latitude)是指地球上某一点与赤道之间的角度,以赤道为0度,北纬为正,南纬为负。
经度(Longitude)是指通过该点和地球自转轴的平面与原点经过的经线之间的夹角。
海拔(Elevation)是指该点相对于一个特定的参考面的高度,通常是相对于海平面的高度。
3. 地磁坐标系和地理坐标系的换算关系地磁坐标系和地理坐标系之间存在一定的换算关系,可以通过一些数学公式和转换参数实现坐标的互相转换。
地磁纬度和地理纬度之间的关系可以通过磁纬度修正公式计算得出。
地磁纬度修正公式考虑了地球自转和地磁场倾角的影响,可以将地理纬度转换为地磁纬度。
地磁经度和地理经度之间的关系可以通过磁经度修正公式计算得出。
柱坐标与直角坐标系的转换关系
柱坐标与直角坐标系的转换关系在数学和物理学中,柱坐标和直角坐标系是描述空间中点位置的两种常见方式。
柱坐标系以距离原点的距离、倾斜角度和高度为参数描述点的位置,而直角坐标系以点在各个轴上的投影为坐标表示点的位置。
在实际问题中,有时需要在这两种坐标系之间进行转换,下面我们来探讨柱坐标与直角坐标系的转换关系。
柱坐标系的表示在柱坐标系中,一个点的位置由三个参数确定:极径r、极角$\\theta$和高度z。
极径r表示点到原点的距离,极角$\\theta$表示点与正半轴的夹角,高度z表示点在z轴上的垂直投影距离。
柱坐标系下,一个点P的坐标$(r, \\theta, z)$可以用三个实数表示,公式如下:$$P(r, \\theta, z)$$转换关系要将柱坐标转换为直角坐标,可以通过以下公式进行计算:•$x = r \\cdot \\cos(\\theta)$•$y = r \\cdot \\sin(\\theta)$•z=z其中,x、y、z分别为点在直角坐标系下的坐标,r、$\\theta$、z为点在柱坐标系下的参数。
同样,如果已知点在直角坐标系下的坐标(x,y,z),可以通过以下公式将其转换为柱坐标:•$r = \\sqrt{x^2 + y^2}$•$\\theta = \\arctan(\\frac{y}{x})$•z=z转换示例假设有一个点$P(3, \\frac{\\pi}{6}, 2)$在柱坐标系下的坐标,我们可以先将其转换为直角坐标。
根据上述转换公式:•$x = 3 \\cdot \\cos(\\frac{\\pi}{6}) = \\frac{3\\sqrt{3}}{2}$•$y = 3 \\cdot \\sin(\\frac{\\pi}{6}) = \\frac{3}{2}$•z=2因此,点P在直角坐标系下的坐标为$(\\frac{3\\sqrt{3}}{2}, \\frac{3}{2}, 2)$。
两个坐标系之间的标定
两个坐标系之间的标定坐标系是描述物体位置的数学工具,常用于测量、导航、图像处理等领域。
在某些应用中,需要将一个坐标系与另一个坐标系进行标定,以便将两个坐标系之间的数据进行转换和匹配。
本文将介绍两个坐标系之间的标定方法和应用。
一、坐标系的定义和表示方法坐标系是一个由坐标轴和原点组成的数学模型,用于描述物体在空间中的位置。
常见的坐标系包括笛卡尔坐标系、极坐标系和球坐标系等。
在笛卡尔坐标系中,一个点的位置可以由三个坐标表示,分别是x、y和z坐标。
二、坐标系的标定方法1. 点对点标定法点对点标定法是最常用的坐标系标定方法之一。
该方法通过选择两个坐标系中的对应点,并测量它们之间的距离和角度,从而确定两个坐标系之间的转换关系。
这种方法适用于已知两个坐标系中的几个点的位置,且这些点在两个坐标系中都能够被准确测量。
2. 基准标定法基准标定法是通过在两个坐标系中选择一个共同的基准点来进行标定。
在这种方法中,需要在两个坐标系中选择一个点作为基准点,并确定该点在两个坐标系中的坐标。
通过测量基准点到其他点的距离和角度,可以确定两个坐标系之间的转换关系。
3. 几何标定法几何标定法是通过测量物体在两个坐标系中的几何特征来进行标定。
这种方法适用于物体在两个坐标系中形状和尺寸都能够被准确测量的情况。
通过测量物体在两个坐标系中的特征点的位置和方向,可以确定两个坐标系之间的转换关系。
三、坐标系标定的应用1. 机器人导航在机器人导航中,需要将机器人的坐标系与环境的坐标系进行标定,以便机器人能够在环境中准确地定位和导航。
通过将机器人在环境中的位置与机器人自身的传感器数据进行匹配,可以实现机器人在复杂环境中的自主导航。
2. 图像处理在图像处理中,常常需要将图像坐标系与实际物体的坐标系进行标定,以便测量图像中物体的位置和大小。
通过在图像中选择已知尺寸的物体,并测量其在图像中的位置和大小,可以确定图像坐标系与实际物体坐标系之间的转换关系。
3. 三维重建在三维重建中,需要将相机的坐标系与物体的坐标系进行标定,以便获取物体在三维空间中的准确位置和形状。
航天测控常用坐标系及其转换关系

航天测控常用坐标系及其转换关系摘要:为解决航天发射任务中,经常涉及到飞行器飞行弹道在各类坐标系之间的转换问题。
该研究详细介绍了航天测控系统常用到的坐标系,包括发射系、发惯系、地心系、测站系、弹体系等,并深入分析了各个坐标系之间的内在关系,给出了各坐标系之间相互换转换公式,为航天测控工作中坐标转换提供了依据。
关键字:测控(TT&C);坐标转换;靶场。
0引言为使靶场测控工作能够正常高效展开,本研究对靶场涉及到的常用坐标系以及相互转换关系进行了深入分析。
本研究中涉及到的坐标转换主要包括发射系、发惯系、地心系、弹体系、测站系以及常用参数的转换计算。
1靶场常用坐标系介绍结合靶场工作实际情况,分析发现靶场常涉及到的坐标系主要包括发射系、发惯系、地心系、弹体系、测站系这几类。
首先对这几类坐标系分别做以下介绍[1~3]。
1.1发射坐标系发射坐标系主要用来描述飞行器的运动和姿态,以O f-x f y f z f表示,如图1所示,定义如下:原点O f:位于飞行器质心在发射台水平面的投影点;x f轴:在原点水平面内,指向发射瞄准方向;y f轴:与过原点的铅垂线一致,指向地球外;z f轴:与x f轴和y f轴构成右手坐标系。
1.2发射惯性坐标系发射惯性坐标系(以下简称发惯系)以O f-x fg y fg z fg表示,原点为发射点,在发射瞬间与发射坐标系相应轴平行,整个参考框架不随地球旋转。
1.3地心大地坐标系地心大地坐标系(以下简称地心系)以O e-x d y d z d表示,如图2所示,定义如下:原点O e:位于地球质心;x d轴:在赤道面内,由地球质心指向格林尼治子午线;y d轴:垂直于赤道面,与地球自转角速度矢量一致;z d轴:与x d轴和y d轴构成右手坐标系。
1.4弹体系飞行器本体坐标系(以下简称弹体系)以O dt-x dt y dt z dt表示,如图3所示,定义如下:原点O dt:位于飞行器质心;x dt轴:沿飞行器纵轴,由质心指向头部;y dt轴:在飞行器的纵对称面内,垂直于O dt-x dt轴,指向上方(即第III象限线);z dt轴:与x dt轴和y dt轴构成右手坐标系。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
7.5 常用坐标系之间的关系与转换一、大地坐标系和空间大地直角坐标系及其关系 大地坐标系用大地纬度企丈地经度L 和丈地髙H 来表示点的位置°这种坐标系是经 典大地测量甬:両用座标紊7屜据地图投影的理论,大地坐标系可以通过一定的投影转 化为投影平面上的直角坐标系,为地形测图和工程测量提供控制基础。
同时,这种坐标系 还是研究地球形状和大小的 种有用坐标系°所以大地坐标系在大地测量中始终有着重要 的作用.空间大地直角坐标系是-种以地球质心为原点购亘墮®坐标系,一般用X 、化Z 表 示点BSSTSTT 逐碇SS 範菇飞両H 绕禎扭转冻其轨道平面随时通过 地球质心。
对它们的跟踪观测也以地球质心为坐标原点,所以空间大地直角坐标系是卫星 大地测量中一种常用的基本坐标系。
现今,利用卫星大地测量的手段*可以迅速地测定点的空间大地直角坐拯,广泛应用于导航定位等空间技术。
同时经过数学变换,还可求岀点 的大地坐标I 用以加强和扩展地面大地网,进行岛屿和洲际联测,使传统的大地测量方法 发生了深刻的变化,所以空间大地宜角坐标系对现今大地测量的发展’具有重要的意义。
、大地坐标系和空间大地直角坐标系的转换如图7- 23所示’尸点的位置用空间 大地直角坐标〔X, Y, Z)表示,其相应 的大地坐标为(E, L)a 将该图与图?一5加以比较可见,图7-5中的子午椭圆平面 相当于图7-23中的OJVP 平面.其中 PPz=Z.相当于图7-5中的j7;OP 3相当 丫于图7-5中的仏两平面的经度乙可视为相同,等于"叽 于是可以直接写岀X=jrcQsi f Y=jrsinL, Z=y将式(7-21).式(7-20)分别代入上式, 井考虑式(7-26)得X=Ncos^cosZr ”Y =NcQsBsinL > (7—78)Z=N (1—护〉sin^ ;上式表明了 2种基本坐标系之间的关系。
BB 7-231.由大地坐标求空间大地直角坐标当已知椭球面上任一点P 的大地坐标(B, L)时,可以按式(7-78)直接求该点的 空间大地直角坐标(X, Y, Z)。
如果P 点不恰好位于椭球面,例如位于大地高为H 的H 点处,此时由大地坐标求空间 大地直角坐标的公式则为X=y=z=L=arctan §利用上式可直接由空间大地直角坐标X 、Y 求出大地经度厶。
为了求岀B 和H,还应对公式作些变化,以适应迭代计算的需要。
由公式(7-79)第一、三式得(N 十H) ZcosL・ a” = (1_e2)式中,cos 厶仍由式(7-79)得出cos.—(N +H )COS B~ yy2_|_y2代入前式又由式(7-79)得 H = ----------- 7:— NcosB式(7-81).式(7-82)就是求3、H 的迭代公式。
迭代开始时设N Q = Q随后,每次迭代按下列公式进行N { — —— __ —V 1—,sin 叨—cosB —(N+H) cosBcos L ](N 十H) cosBsinL 、〔N (1—e 2) +刃〕sinBJ2.由空间大地直角坐标求大地坐标当已知X 、y 、Z 反求B 、L 、H 时,可以采用直接解法或迭代解法。
由公式(7-79)第…、二两式得(7-79) (7-80)B=arctanVX^Y 2 (7-81)(7-82)B 0=arctanHo=+ W+Z2_ 应 2 VX 2^Y 2厂〕宜至b-B—和Hi-H—小于要求的限值为止。
一般,在要求H精确至0.001m、占精确至0.0000/时,需要迭代4次。
三、不同空间大地直角坐标系的换算利用“GPS”定位所获取的点位属于空间大地直弟坐标系。
可是由于各国所采用的参考 椭球及其定位不同,参考椭球中心也不和地球质心重合,所以世界上存在着各不相同的空间大地直角坐标系。
为了将“GPS”定位成果转换成各自需用的成果,就出现了不同空间大 地直角坐标系的换算。
这在“GPS”定位的数据处理中,应用十分广泛.在高等数学的解析几何里,曾经论证了二维直 角坐标系中,当坐标轴旋转角度。
时(图7-24),用 旧系坐标表示新系坐标的公式为..> (7-33)丁弄=—日 sma-F^ia costfj 在三维空间直角坐标系中,新、旧两坐标系的 变换需要在3个坐标平面上,分别通过3次转轴才 能完成。
如图7-25所示.2个空间大地直角坐标系和0 —心Yirr Z e ,它们的原点一致, 但相应的坐标轴互不平行,存在微小差异。
按以下步骤进行转轴可以将o —心丫旧乙日转换成o-x 新第一*保持OZ 时轴不动,绕其将OX" ox 日轴錠转微小角度殳,旋转后的坐标轴设为OX\ OY\ OZ\ 则有X* —X^ cose.+Yjg sine fY 1 = —X|日 sin®十F 旧 cose sZT日<7-84)图 7—25第二,保持OF轴不动,绕其将OZJOX,轴旋转微小角度旋转后的坐标轴设为OX"、OY\ OZ\则有X"= X,cos®—Z'sin^Yr=r > (7-85)Z"=X'sin£Y+Z'cos&Y,第三,保持OX"轴不动,绕其将0严、OZ"轴旋转微小角度匕,旋转后的坐标轴设为OX*、OY祈、OZ輪,则有X^=X n *=y"coss+Z"sin£x [ (7-86)= 一y"sinEx+Z"cos&x这样,将O一X旧Y旧Z旧分别绕3个坐标轴旋转了3个微小角度£z、弘5,使其和O—天新丫新Z新重合。
£x、£丫、£z称为欧勒角。
将式(7—84)代入式(7—85),再代入式(7 — 86),由于馭、£丫、£乙是秒级微小量,略去其正弦、余弦函数展开式中2次及以上各项,得Xgj =X|日+£疔旧r£yZ日2新=2旧十£丫乂旧一5丫旧当新、旧2个坐标系的原点不相一致时,还需根据坐标轴的平移原理,将旧系原点移至新系原点,其变化公式为X新=Xo+X|日+£疔口—£丫乙日(7-87)式中,X。
、y。
、Z。
称为3个平移参数,是旧坐标系原点在新坐标系中的3个坐标分量。
若再考虑两个坐标系的尺度比例也不一致,即存在有尺度变化的参数,设为虹则有Xgf=Xo+ (1+上)Xia+®YiB—£Y Z(.日丫新=丫。
+ (1+“)丫旧一叨^+谄旧》(7—88)Zjfi=Zo+ (1+&) Zig+Cy^S-€X Y|0 .上式即为布尔莎公式。
公式中存在7个参数:3个平移参数X。
、丫。
和Z。
,3个旋转参数昭为、切1个尺度变化参数虹习惯上称这种换算法为七参数法。
七参数法除布尔莎公式外,还有莫洛琴斯基公式和范士公式等。
由公式(7-88)可知,由一个坐标系换算成另一个坐标系,必须知道其转换参数。
转换参数可以通过联测一些公共点获得,因为通过公共点联测,可以得到这些公共点在新、IB 2个坐标系中的坐标值,于是就可以利用公式(7-88)求出转换参数。
当公共点数较多时, 观测方程式个数就大丁所求参数个数,这时还可根据测董平差原理列立观测值的误差方程式,组成并解算法方程,求得转换参数。
四、不同大地坐标系的换算地面点在椭球面上的位置,是由一定元素和定位的椭球所规定的.如果选择的椭球元 素和定位发生变化,地面点在椭球面上的大地坐标必将随之变化•根据椭球元素和定位的 变化推求点的大地经纬度和大地高变化的公式,叫做大地坐标微分公式,它是不同大地坐 标换算的基础,下面首先来推导大地坐标微分公式。
由公式(7-79)可以看出,点的空间大地直角坐标是椭球几何元素(用长半径◎和扁 率产表示)和椭球定位元素(吕、L 、H)的函数口当椭球元素和定位结果发生了变化时,点 的空间大地直角坐标必然发生变化*取式(7-79)的全微分,即dN 37Vde 3 f找、丄 M . 石=厉石=厉卫(1 一代曲⑵一刃石 ⑵-r )2匚严历需=磊〔復 t l-ehin 2B )3 =^sinBcosB则根据式(7-79)可以求出二 ^cosBcosL= -cosBcosL da a 寻=^cosBcosL= y^jcosBcosLsin 2BcosBcosL — (N+H) sin£cosZ=— (M+H) sinBcosL将以上5式代入式(7-89)第1式得考虑到(7-89)3XoU 3X dL = ~(N+H) cosBsinL dX dH=cosBcosL dX 器也+訓/•+報盼報"爲dN d r, , j > NdX=NcosBcos 厶虫+McosBcos 厶sin?" 7^7— (M+Z/) sinBcosLdB a 1—/—(N+H) cosBsinLd£+cosBcosLd/l同理 dy=NcosBsinL — 4-A/cosBsinLsin 2B 7^7— (M+H) sinBsin 厶dB a 1—j + (M+H) cosBcosLdL+cosBsinLdHdZ=N (1—e 2) sinB ——M (l+cos z B —^2sin 2B) sinB 县: a- 1—J+ (M+H) cosBdB+sinBdH若以dH 、dB 、d 厶为未知数解算以上3式,则得dH=cosBcosLdX+cosBsinLdY+sinBdZ —N (1—^2sin 2B)乎+M (l-e 2sin 2B) sin 2BdB=肚*芳〔一sinBcosLdX —sinBsinLdy-4-cosBdZ+WsinBcosB 乎+M (2-?siiM) sinBcosB 筲〕dL= XT } rj (—secBsin£dX+secBcosLdy)h+H 式中,血、”表示椭球元素(长半径、扁率)的变化;dx 、収、dz 表示楠球中心的变化, 即椭球定位的变化。
因此,式(7-91)就是由于椭球元素和定位变化引起点的大地坐标变 化的公式,亦即大地坐标微分公式。
将上式代入下式,即得不同大地坐标系的换算公式力新=厶旧+d 厶}B^=B^+dB [日新=H 旧+dH :当考虑欧勒角和尺度变化参数时,可将式(7-88)写成如下形式 dX=X 新一/=&+宓旧+莎旧一翻旧dK=y M 一丫旧=人+羽旧rzXm +翻旧dZ=Zfr — %=Zo+〃Z 旧 +&X 旧一“Y|日上式等号右端的X 旧、Z l3用式(7-79)等号右端的函数代入后,再将上式代入式(7— 91),经过整理可得广义大地坐标的微分公式 ,> (7-90) > (7-91)(7-92)(i//=cosBcosLX 0+cosBsinjLy a +sinBZ 0—-Ve 2sinBcosBsinZx x+N/sinBcosBcosL€y+N (1—e 2sin 2B) k —N (1—e 2sin 2B) +M (1 —/sirfB) sin 2B dB= »z ! rr (—sinBcos 厶X°—sinBsinZyo+cosBZo) —sinLe x M 十HN . ] 4-cosLey —^e 2sinBcosB^+:N/sinBcosB 屯+M (2—护sin'B) sinBcosBd 厶=&;H (—secBsinLXo+secBcos 厶7%)+tanBcosZx x-rtanBsinL€Y —€z上式即为布尔莎形式的广义大地坐标微分公式。