二维步进单片机控制工作台控制系统设计
基于单片机二维数控实验平台设计与实现
优秀设计基于单片机的二维数控实验台的设计与实现摘要本设计结合机电一体化课程教学环节需要,设计用单片机作为控制系统的X-Y工作台。
通过论述X-Y工作台机械结构设计和控制电路接口设计,阐述了机电一体化设计中的共性和关键技术.基于单片机二维数控系统是以单片机为主体,二维数控实验平台为核心的系统。
主要应用单片机作为控制核心,LED点阵显示芯片与数控系统相结合的系统。
充分发挥了单片机的性能。
其优点硬件电路简单,软件功能完善,控制系统可靠,性价比较高等特点,具有一定的使用和参考价值。
该系统设计是一个开环控制系统,其结构简单.实现方便而且能够保证一定的精度.降低成本,是控制技术的最简单的应用.它充分的利用了单片机软件硬件功能以实现对机床的控制;使机床的加工范围扩大,精度和可靠性进一步得到提高.系统设计是利用AT89S51单片机,及27128,6264存储器及8155芯片等硬件组成,在控制系统的硬件上编写一定的程序以实现一定的加工功能.其基本思想是:通过单片机控制使电机运动从而实现工作台的移动。
关键词:X—Y工作台;单片机;机电一体化设计NC-based single-chip two-dimensional test-bed designand implementationAbstractThe combination of mechanical and electrical design aspects of the integration of teaching needs, the design of control systems with single-chip microcomputer as the XY table. XY table through on the design of mechanical structure and control interface circuit design, mechanical-electrical integration on the design of the common and key technologies.Two-dimensional numerical control system based on single-chip based on single-chip microcomputer as the main body, the experimental two-dimensional numerical control system as the core platform. The main application of single-chip microcomputer as control core, LED dot matrix display system chips with a combination of CNC system. Give full play to the single-chip performance. Advantage of simple hardware circuit, software functions, the control system reliable and cost-effective features such as high, with a certain degree of use and reference value.The system design is an open-loop control system, its simple structure, convenient and can realize. Sure. Reduce cost, is the most simple control technology application. It fully utilize the MCU software and hardware function to realize the control of machine tools, Machine processing expanded, accuracy and reliability is further improved.System design is to use 27128,6264,AT89S51 and memory and 8155 chips, hardware composition in the control system of the hardware written procedures to achieve certain processing function. The basic idea is: through the single-chip microcomputer control make motor sports so as to realize the worktable moving.Key words: X-Y table; singlechip; mechatronics design目录第1章绪论………………………………………………………………………… .11.1课题意义 (1)1.2课题研究主要内容 (1)第2章机械系统设计 (2)2.1设计参数的确定 (2)2.2 总体方案设计 (2)2.2.1传动部件的选择 (3)2.2.2控制系统的设计 (3)2.2.3步进电机的选用 (4)2.2.4滚珠丝杠的设计计算 (5)2.2.5滚动导轨的参数确定 (7)2.2.6 滚动轴承选型…………………………………………………… .82.2.7 滚动导轨刚度及预紧 (9)2.2.8步进电机惯性负载的计算 (9)第3章控制系统设计 (11)3.1 硬件配置 (11)3.2 总体接口设计 (17)3.2.1键盘设计 (17)3.2.2 显示器设计............................................................... .19 3.3 步进电机驱动电路和工作原理 (22)3.4总体程序控制 (23)第4章基于单片机的二维数控实验台的实现 (26)4.1 搭建单片机电路 (26)4.2 调试程序 (27)4.3 单片机控制完成,实现功能要求 (28)总结 (29)致谢 (30)参考文献 (31)第1章绪论1.1课题意义二维数控实验平台系统设计是一个开环控制系统,其结构简单.实现方便而且能够保证一定的精度.降低成本,是控制技术的最简单的应用.它充分的利用了单片机软件硬件功能以实现对机床的控制;使机床的加工范围扩大,精度和可靠性进一步得到提高.1.2课题研究主要内容二维数控实验平台系统设计是利用AT89S51单片机,及27128,6264存储器及8155芯片等硬件组成,在控制系统的硬件上编写一定的程序以实现一定的加工功能.其基本思想是:通过单片机控制使电机运动从而实现工作台的移动。
基于单片机的步进电机控制系统设计

中国地质大学(武汉)远程与继续教育学院本科毕业论文(设计)指导教师指导意见表学生姓名:学号:专业:电气工程及其自动化毕业设计(论文)题目:基于单片机的步进电机控制系统设计中国地质大学(武汉)远程与继续教育学院本科毕业设计(论文)评阅教师评阅意见表学生姓名:学号:专业:电气工程及其自动化毕业设计(论文)题目:基于单片机的步进电机控制系统设计论文原创性声明本人郑重声明:本人所呈交的本科毕业论文《基于单片机的步进电机控制系统设计》,是本人在导师的指导下独立进行研究工作所取得的成果。
论文中引用他人的文献、资料均已明确注出,论文中的结论和结果为本人独立完成,不包含他人成果及使用过的材料。
对论文的完成提供过帮助的有关人员已在文中说明并致以谢意。
本人所呈交的本科毕业论文没有违反学术道德和学术规范,没有侵权行为,并愿意承担由此而产生的法律责任和法律后果。
论文作者(签字):日期:2014 年9 月 1 日摘要本文应用单片机、步进电机驱动芯片、执行部件等,构建了集步进电机控制器和驱动器为一体的步进电机控制系统。
二维工作台作为被控对象通过步进电机驱动滚珠丝杆在X/Y轴方向联动。
文中讨论了一种以最少参数确定一条圆弧轨迹的插补方法和步进电机变频调速的方法。
步进电机控制系统的开发采用了软硬件协同仿真的方法,可以有效地减少系统开发的周期和成本。
最后给出了步进电机控制系统的应用实例。
目录一、绪论 (5)(一)引言 (5)(二)步进电机常见的控制方案与驱动技术简介 (6)(三)本文研究的内容 (9)二、步进电机概述 (11)(一)步进电机的分类 (11)(二)步进电机的工作原理 (11)三、系统的硬件设计 (16)(一)系统设计方案 (16)(二)单片机最小系统 (17)(三)串口通信模块 (22)(四)数码管显示电路设计 (23)(五)电机驱动模块设计 (25)(六)驱动电流检测模块设计 (27)(七)独立按键电路设计 (32)四、系统的软件实现 (33)(一)系统软件主流程图 (33)(二)系统初始化流程图 (33)(三)按键子程序 (34)(四)系统组成 (37)(五)程序设计 (39)五、结论 (56)(一)具体结论 (56)(二)后续工作 (56)致谢 (57)参考文献 (58)一、绪论(一)引言步进电动机又称脉冲电动机或阶跃电动机,国外一般称为Steppingmotor、Pulse motor或Stepper servo,其应用发展已有约80年的历史。
机械毕业设计626二维步进单片机控制工作台机械系统设计

摘要本系统采用一级齿轮减速,带动丝杠传动,通过螺母的直线移动带动工作台运动。
根据脉冲当量、步矩角、丝杠导程来确定齿轮的传动比,根据负载转矩的大小来校核丝杠传动的强度。
单片机控制二维工作台是众多控制机械传动方法的一种,它利用单片机发出指令控制步进电机的转角和转速,进而控制X-Y工作台两方向的移动,实现画线,移动物体等功能,常用于试验教学。
单片机控制二维工作台主要由三部分组成:工作台及传动支撑部分,减速装置,控制部分及电机组成。
单片机控制的X-Y工作台系统可以设计为开环,半闭环和闭环伺服系统三种。
本设计采用开环伺服系统,通过单片机控制步进电动机的驱动,经传动机构动带动工作台的运动。
系统没有检测装置。
机械结构设计首先根据工作台的最大载荷,选取导轨副,设计工作台,然后进行结构设计,受力分析,转矩计算,画出工作台的装配草图,再选择步进电动机的型号,进而设计选择滚珠丝杠,最后设计出X-Y工作台,画出其装配图。
关键词工作台;步进电机;脉冲当量;步距角AbstractSCM control of the XY table system can be designed for the open-loop, semi-closed-loop system and closed-loop servo three. I design is open-loop servo systems using the stepper motor driven by the stepper motor control microcontroller-driven, driven by the transmission mechanism dynamic table of the campaign. System is not detecting device. Mechanical structural design of the first table under the maximum load, select the rails of the design table, and then the structural design, mechanical analysis, torque, the assembly table to draw the draft, then select the type stepper motor, thereby Design choices ball screw, the final design XY table, draw their assembly.The system uses a gear to reduce speed transmission driven screw, nut straight through mobile workstation driven campaign. According to pulse equivalent, step moment Kok, screw lead to determine the gear transmission ratio, according to the size of load torque than the strength of the screw drive. SCM control of two-dimensional table of the many methods of control of a mechanical transmission, it issued a directive by SCM stepper motor control and the speed of rotation, thereby control the direction of the two XY table movement, and drawing a line, moving objects , And other functions, commonly used in the trial of teaching.SCM control of two-dimensional table mainly consists of three parts: transmission and support of the table, deceleration devices, motor control parts and components.Keywords table stepper motor control microcontroller-driven pulse equivalent step moment kok目录1绪论 (1)1.1课题研究的背景 (1)1.2工作台的分类 (1)1.3本设计工作台的作用和特点 (3)1.4步进电机的发展现状 (3)1.5单片机的发展现状 (5)2方案原理的设计 (6)2.1总体方案的选择和说明 (6)2.2总体方案实现的系统组成框图 (7)3各零件的设计 (8)3.1步进电机的设计 (8)3.1.1步进电机的组成及工作原理 (8)3.1.2步进电机的选择 (9)3.1.3 步进电机的校核 (9)3.2减速器设计 (10)3.2.1主动齿轮的选择与计算 (10)3.2.2从动齿轮的选择与校核 (13)3.2.3轴的设计 (13)3.3轴承的设计 (16)3.3.1小轴两端轴承的选择和计算 (17)3.3.2大轴两端轴承的选择和计算 (18)3.4联轴器的设计 (19)3.4.1步进电机输出轴与小轴之间联轴器的选择与计算 (19)3.4.2大轴和滚珠丝杠间联轴器的选择和计算 (20)3.5键的设计 (21)3.6丝杠的设计 (22)3.6.1丝杠的特点 (22)3.6.2丝杠的选择 (23)3.6.3丝杠的校核计算 (23)3.7 导轨的设计 (25)3.7.1直线滚动导轨的选型 (26)3.7.2直线滚动导轨的校核计算 (27)3.8支座的特点及材料组成 (29)结论 (32)致谢 (32)参考文献 (34)附录............................................................................................................... 错误!未定义书签。
基于单片机的二维数控实验台的设计与实现

基于单片机的二维数控实验台的设计与实现摘要本设计结合机电一体化课程教学环节需要,设计用单片机作为控制系统的X-Y工作台。
通过论述X-Y工作台机械结构设计和控制电路接口设计,阐述了机电一体化设计中的共性和关键技术.基于单片机二维数控系统是以单片机为主体,二维数控实验平台为核心的系统。
主要应用单片机作为控制核心,LED点阵显示芯片与数控系统相结合的系统。
充分发挥了单片机的性能。
其优点硬件电路简单,软件功能完善,控制系统可靠,性价比较高等特点,具有一定的使用和参考价值。
该系统设计是一个开环控制系统,其结构简单.实现方便而且能够保证一定的精度.降低成本,是控制技术的最简单的应用.它充分的利用了单片机软件硬件功能以实现对机床的控制;使机床的加工范围扩大,精度和可靠性进一步得到提高.系统设计是利用AT89S51单片机,及27128,6264存储器及8155芯片等硬件组成,在控制系统的硬件上编写一定的程序以实现一定的加工功能.其基本思想是:通过单片机控制使电机运动从而实现工作台的移动。
关键词:X—Y工作台;单片机;机电一体化设计NC-based single-chip two-dimensional test-bed designand implementationAbstractThe combination of mechanical and electrical design aspects of the integration of teaching needs, the design of control systems with single-chip microcomputer as the XY table. XY table through on the design of mechanical structure and control interface circuit design, mechanical-electrical integration on the design of the common and key technologies.Two-dimensional numerical control system based on single-chip based on single-chip microcomputer as the main body, the experimental two-dimensional numerical control system as the core platform. The main application of single-chip microcomputer as control core, LED dot matrix display system chips with a combination of CNC system. Give full play to the single-chip performance. Advantage of simple hardware circuit, software functions, the control system reliable and cost-effective features such as high, with a certain degree of use and reference value.The system design is an open-loop control system, its simple structure, convenient and can realize. Sure. Reduce cost, is the most simple control technology application. It fully utilize the MCU software and hardware function to realize the control of machine tools, Machine processing expanded, accuracy and reliability is further improved.System design is to use 27128,6264,AT89S51 and memory and 8155 chips, hardware composition in the control system of the hardware written procedures to achieve certain processing function. The basic idea is: through the single-chip microcomputer control make motor sports so as to realize the worktable moving.Key words: X-Y table; singlechip; mechatronics design目录第1章绪论………………………………………………………………………… .11.1课题意义 (1)1.2课题研究主要内容 (1)第2章机械系统设计 (2)2.1设计参数的确定 (2)2.2 总体方案设计 (2)2.2.1传动部件的选择 (3)2.2.2控制系统的设计 (3)2.2.3步进电机的选用 (4)2.2.4滚珠丝杠的设计计算 (5)2.2.5滚动导轨的参数确定 (7)2.2.6 滚动轴承选型…………………………………………………… .82.2.7 滚动导轨刚度及预紧 (9)2.2.8步进电机惯性负载的计算 (9)第3章控制系统设计 (11)3.1 硬件配置 (11)3.2 总体接口设计 (17)3.2.1键盘设计 (17)3.2.2 显示器设计............................................................... .19 3.3 步进电机驱动电路和工作原理 (22)3.4总体程序控制 (23)第4章基于单片机的二维数控实验台的实现 (26)4.1 搭建单片机电路 (26)4.2 调试程序 (27)4.3 单片机控制完成,实现功能要求 (28)总结 (29)致谢 (30)参考文献 (31)第1章绪论1.1课题意义二维数控实验平台系统设计是一个开环控制系统,其结构简单.实现方便而且能够保证一定的精度.降低成本,是控制技术的最简单的应用.它充分的利用了单片机软件硬件功能以实现对机床的控制;使机床的加工范围扩大,精度和可靠性进一步得到提高.1.2课题研究主要内容二维数控实验平台系统设计是利用AT89S51单片机,及27128,6264存储器及8155芯片等硬件组成,在控制系统的硬件上编写一定的程序以实现一定的加工功能.其基本思想是:通过单片机控制使电机运动从而实现工作台的移动。
基于单片机的步进电机控制系统的设计(有全套CAD图纸)
基于单片机的步进电机控制系统的设计(有全套CAD图纸)全套CAD图纸,联系 695132052由于部分原因,说明书已删除大部分,完整版说明书,CAD图纸等,联系695132052基于单片机的步进电机控制系统的设计摘要:步进电动机由于用其组成的开环系统既简单,廉价,又非常可行,因此在打印机等办公自动化设备以及各种控制装置等众多领域有着极其广泛的应用。
本文用汇编语言编写电机的正转,反转,加速,减速,停止程序,通过单片机,电机的驱动电路以及相应的按键实现以上功能,并且步进电机的工作状态要用相应的LED管显示出来。
关键词:步进电机;驱动电路;单片机;转动The Design of the Control System of Step-Motor Based on SCMOrient Science&Technology College of Hunan Agricultural University,Changsha 410128,ChinaAbstract: The open-loop system which is composed by stepping motor is simple, cheep, but very practical, so there are very wide range ofapplications in printers and other officeautomation equipment and various control devices, and many other fields. In this article descibes one design of step-motor system based on microcontroller. It designs the system hardware circuit and the program of the preparation of a motor, reverse, speed up, slow down, stop is written by compile language. The above function are realized through the microcontroller, motor driver circuit and correspond keys, and the work state of stepper motor is displayed through the light-emitting diode.Key Words: Stepping motor;driving circuit;single chip microcomputer;rotation1 前言课题研究的目的和意义步进电机是一种将电脉冲信号转换成直线位移或角位移的控制微电机,其机械位移和转速分别与输入电机绕组的脉冲个数和脉冲频率成比例.通过改变电脉冲频率,可在大范围内进行调速.同时,该电机还能快速起动、制动、反转和自锁.此外,步进电机易于实现与计算机或其他数字元件接口,适用于数字控制系统.步进电机只需采用最简单的开环控制就可取得非常高的控制精度,且这种系统不需要反馈信号,系统硬件实施比较简单。
《2024年基于单片机的步进电机控制系统的设计与实现》范文
《基于单片机的步进电机控制系统的设计与实现》篇一一、引言随着科技的不断发展,步进电机控制系统在各个领域的应用越来越广泛。
步进电机控制系统是一种通过单片机控制步进电机运动速度和方向的装置,具有精度高、控制方便等优点。
本文将介绍基于单片机的步进电机控制系统的设计与实现,包括系统设计、硬件设计、软件设计以及系统测试等方面。
二、系统设计步进电机控制系统主要由单片机、步进电机、驱动器等组成。
其中,单片机是控制系统的核心,负责控制步进电机的运动方向和速度。
系统的设计主要基于实际应用需求,根据需要确定系统功能,例如设置合适的运行模式和功能,以便更方便地操作和控制步进电机。
在系统设计中,需要注意几个关键问题:首先是确保控制精度,需要保证单片机的运算速度和准确性;其次是提高系统的可靠性,通过采用一些防护措施和稳定的技术来提高系统的稳定性和可靠性;最后是提高系统的灵活性,使系统能够适应不同的应用场景和需求。
三、硬件设计硬件设计是步进电机控制系统的关键环节之一。
在设计时,需要考虑单片机与步进电机之间的连接方式、电源电路、信号处理电路等。
其中,单片机与步进电机之间的连接方式需要选择合适的接口电路,以确保信号传输的稳定性和准确性。
此外,还需要考虑电源电路的设计,以确保系统能够正常工作并具有足够的稳定性。
在硬件设计中,还需要注意以下几点:首先是选择合适的元器件和材料,以确保硬件的质量和性能;其次是进行充分的测试和验证,以确保硬件的可靠性和稳定性;最后是考虑系统的可扩展性,为未来的升级和维护提供便利。
四、软件设计软件设计是步进电机控制系统的另一关键环节。
在软件设计中,需要根据系统需求和硬件配置编写相应的程序代码。
其中,程序代码需要具有高效性、稳定性和可读性等特点。
同时,还需要根据不同的应用场景和需求编写不同的控制算法和程序模块。
在软件设计中,需要注意以下几点:首先是确保程序的正确性和稳定性,通过进行充分的测试和验证来确保程序的可靠性和准确性;其次是优化程序的性能,以提高程序的运行速度和响应速度;最后是考虑程序的易用性和可维护性,以便于后续的升级和维护。
基于单片机的数控车床XY工作台与控制系统设计报告
基于单片机的数控车床XY工作台与控制系统设计报告设计报告:基于单片机的数控车床XY工作台与控制系统设计1.引言数控(数值控制)车床是一种以机电一体化技术为基础,通过计算机控制工件加工的设备。
传统的车床需要操作工人手动控制加工过程,而数控车床则通过计算机编程实现自动化加工。
本设计报告旨在设计基于单片机的数控车床XY工作台与控制系统,实现工件在XY平面上的精准加工。
2.系统设计(1)硬件设计本系统的硬件设计包括数控车床的机械结构和控制系统的电路设计。
数控车床的机械结构需要设计XY工作台的运动结构。
可以采用步进电机或直流伺服电机作为驱动器,通过丝杆传动实现运动。
同时,需要设计定位传感器用于测量工件位置,反馈给控制系统。
控制系统的电路设计主要包括单片机的选择和配套电路。
可以选择性能稳定、功能强大的单片机作为控制器,并设计外部电路实现与驱动器和传感器的连接。
此外,还需要设计电源电路、通信接口等。
(2)软件设计软件设计是数控车床控制系统非常重要的一部分,需要实现驱动器控制和运动轨迹规划等功能。
可以使用C语言开发嵌入式软件程序。
驱动器控制:通过控制输出脉冲和方向信号,控制步进电机或直流伺服电机的运动。
可以根据用户输入的指令,控制工件在XY平面上移动。
运动轨迹规划:根据用户输入的参数,计算出工件在XY平面上移动的运动轨迹。
可以采用插补算法,实现平滑移动和加工轨迹自由控制。
3.系统实现(1)实现步骤首先,进行硬件设计。
根据车床的尺寸和加工需求设计XY工作台的运动结构,选择合适的驱动器和传感器。
然后,根据单片机选型,设计电路连接驱动器和传感器。
最后,设计电源电路和通信接口。
其次,进行软件设计。
根据硬件设计的结果,编写嵌入式软件程序,实现驱动器控制和运动轨迹规划等功能。
最后,进行系统调试。
根据设计的功能要求,对系统进行全面测试和调试,验证系统的稳定性和性能。
(2)实验结果通过实验验证,本设计的数控车床XY工作台与控制系统实现了工件在XY平面上的精确加工。
《2024年基于单片机的步进电机控制系统的设计与实现》范文
《基于单片机的步进电机控制系统的设计与实现》篇一一、引言步进电机因其精准的控制能力和高效率的特性在各种机械设备中得到广泛应用。
而单片机作为现代电子技术的核心,具有低成本、高效率的特点。
本文旨在探讨基于单片机的步进电机控制系统的设计与实现,以实现步进电机的精确控制与高效运行。
二、系统设计1. 硬件设计本系统主要由单片机、步进电机、驱动器、电源等部分组成。
其中,单片机作为核心控制器,负责接收上位机指令,解析并输出控制信号给步进电机驱动器。
步进电机驱动器则负责将单片机的控制信号转化为步进电机可以识别的驱动信号,驱动步进电机运转。
(1)单片机选择本系统选用的是STC12C5A60S2型单片机,其具有高性能、低功耗的特点,适合于步进电机控制系统的设计。
(2)步进电机选择本系统选用的步进电机为两相混合式步进电机,具有运行平稳、噪音小等优点。
(3)驱动器选择步进电机驱动器选用专为两相混合式步进电机设计的A4988型号驱动器,该驱动器能有效地提高电机的输出扭矩和效率。
2. 软件设计软件设计主要包括单片机的程序编写和上位机界面的设计。
(1)单片机程序编写单片机程序采用C语言编写,主要实现以下功能:接收上位机指令、解析指令并输出控制信号给步进电机驱动器、实时检测步进电机的运行状态并向上位机反馈信息等。
(2)上位机界面设计上位机界面采用常见的图形化界面设计,便于用户操作。
界面主要包括电机运行参数的设置、运行状态的显示等功能。
用户可以通过界面输入控制指令,这些指令会被发送到单片机进行处理。
三、系统实现系统实现主要包括硬件的搭建与调试、单片机的编程与测试、上位机界面的开发等步骤。
1. 硬件搭建与调试按照设计图纸将各部分硬件进行组装,并进行调试,确保各部分硬件工作正常。
2. 单片机编程与测试根据程序设计编写单片机程序,并进行调试和测试,确保程序能够正确接收和处理上位机指令,并能够输出正确的控制信号给步进电机驱动器。
3. 上位机界面的开发根据需求开发上位机界面,实现用户友好的操作界面和丰富的功能。
《2024年基于单片机的步进电机控制系统的设计与实现》范文
《基于单片机的步进电机控制系统的设计与实现》篇一一、引言随着现代科技的飞速发展,步进电机控制系统在各种自动化设备中得到了广泛应用。
步进电机控制系统的性能和效率直接影响到设备的运行效果。
本文将详细介绍基于单片机的步进电机控制系统的设计与实现过程,旨在提高步进电机控制系统的稳定性和可靠性。
二、系统设计1. 硬件设计本系统采用单片机作为核心控制器,配合步进电机驱动器、电源模块、输入输出设备等组成。
其中,单片机选用具有高性能、低功耗特点的型号,以满足系统的高效运行需求。
步进电机驱动器选用具有较高驱动能力的模块,以实现对步进电机的精确控制。
(1) 单片机模块:作为整个系统的核心,负责接收输入信号、处理数据并输出控制信号。
(2) 步进电机驱动器模块:接收单片机的控制信号,驱动步进电机进行运动。
(3) 电源模块:为整个系统提供稳定的电源供应。
(4) 输入输出设备:包括按键、LED灯等,用于实现人机交互。
2. 软件设计软件设计主要包括系统初始化、信号处理、控制算法实现等部分。
系统初始化包括单片机配置、中断设置等;信号处理主要是对输入信号进行采集、分析和处理;控制算法实现则是根据处理后的信号,输出控制步进电机的指令。
(1) 系统初始化:设置单片机的工作模式、时钟频率等,为后续的信号处理和控制算法实现做好准备。
(2) 信号处理:通过ADC(模数转换器)采集输入信号,进行滤波、放大等处理,以提高信号的抗干扰能力和信噪比。
(3) 控制算法实现:根据处理后的信号,采用适当的控制算法(如PID控制、模糊控制等)输出控制步进电机的指令。
三、系统实现1. 硬件连接根据系统设计,将单片机、步进电机驱动器、电源模块、输入输出设备等连接起来。
确保各模块之间的连接正确、稳定。
2. 编程实现根据软件设计,使用C语言或汇编语言编写程序代码。
程序代码应包括系统初始化、信号处理、控制算法实现等部分。
在编写过程中,应注意代码的健壮性、可读性和可维护性。
步进电机的单片机控制系统软件设计
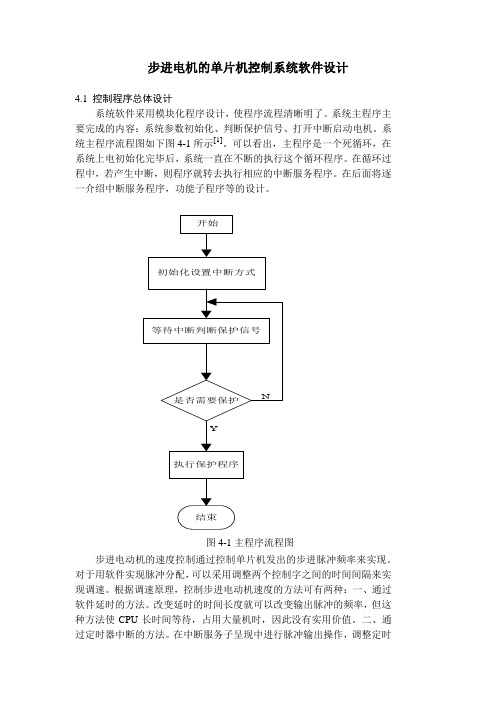
步进电机的单片机控制系统软件设计4.1 控制程序总体设计系统软件采用模块化程序设计,使程序流程清晰明了。
系统主程序主要完成的内容:系统参数初始化、判断保护信号、打开中断启动电机。
系统主程序流程图如下图4-1所示[1]。
可以看出,主程序是一个死循环,在系统上电初始化完毕后,系统一直在不断的执行这个循环程序。
在循环过程中,若产生中断,则程序就转去执行相应的中断服务程序。
在后面将逐一介绍中断服务程序,功能子程序等的设计。
图4-1主程序流程图步进电动机的速度控制通过控制单片机发出的步进脉冲频率来实现。
对于用软件实现脉冲分配,可以采用调整两个控制字之间的时间间隔来实现调速。
根据调速原理,控制步进电动机速度的方法可有两种:一、通过软件延时的方法。
改变延时的时间长度就可以改变输出脉冲的频率,但这种方法使CPU长时间等待,占用大量机时,因此没有实用价值。
二、通过定时器中断的方法。
在中断服务子呈现中进行脉冲输出操作,调整定时器的定时常数就可以实现调速。
本系统软件延时的方法实现调速,从HSO.0通道输出连续脉冲信号。
在50H单元存放脉冲处于“1”电平时间值(单位为2 ),52H单元存放脉冲处于“0”电平时间值(单位为2 )。
改变50H和52H单元的内容,就可以改变脉冲输出的频率及占空比。
程序如下:主程序ORG 2080HOUPSS:LD SP,#00C0H ;设栈指针DI ;关中断ORB INT-MASK,#8H ;允许HSO中断LD TEMP,#HSO-INT ;送HSO中断服务程序入口地址ST TEMP,2006H[0]ADD 54H,T1,52H ;计算上跳变时刻SCALL LDCAM ;调CAM装载子程序EI ;开中断HERE:SJMP HERE ;等待中断中断服务程序HSO-INT:PUSHF ;保护PSW,同时清PSWSCALL LDCAM ;调CAM装载子程序POPF ;恢复PSWRET ;返回主程序CAM装载子程序LDCAM:LDB HSO-COMMAND,#20H ;1→HSO.0LD HSO-TIME,54HADD 54H,50H ;计算下跳变时刻NOPNOP ;空操作LDB HSO-COMMAND,#10H ;0→HSO.0,并产生HSO中断LD HSO-TIME,54HADD 54H,52H ;计算上跳变时刻RET其它高速输出口(HSO)的连续脉冲信号的产生程序可依据如上程序写入。
基于单片机的步进电机控制系统设计
基于单片机的步进电机控制系统设计引言:步进电机是一种常用的电机类型,具有精准的位置控制、高效的能量转换等特点。
在许多自动化设备中广泛应用,如数控机床、3D打印机、机器人等。
本文将以基于单片机的步进电机控制系统设计为主题,介绍系统的硬件设计、软件设计以及实验验证。
一、硬件设计1.步进电机选型:根据实际应用需求,选择适当的步进电机。
包括步距角、转速范围、扭矩要求等等。
2.电源设计:步进电机需要驱动电压和电流,根据步进电机的额定电压和电流选用适当的电源。
3.驱动电路设计:步进电机通常需要驱动电路来控制电流和脉冲序列。
常见的驱动电路有全桥驱动器、半桥驱动器等。
4.信号发生器设计:步进电机通过脉冲信号来控制转动角度和速度,因此需要信号发生器来产生合适的脉冲序列。
常见的信号发生器有定时器、计数器等。
5.单片机接口设计:单片机作为步进电机控制系统的核心,需要与其他硬件进行通信。
因此需要设计合适的接口电路,将单片机的输出信号转换为驱动电路和信号发生器所需的电压和电流。
二、软件设计1.单片机程序框架设计:根据具体的单片机型号和开发环境,设计合适的程序框架。
包括初始化设置、主循环、中断处理等。
2.脉冲生成程序设计:根据步进电机的控制方式(如全步进、半步进、微步进等),设计脉冲生成程序。
通过适当的延时和输出信号控制,产生合适的脉冲序列。
3.运动控制程序设计:设计运动控制程序,实现步进电机的前进、后退、加速、减速等功能。
根据具体需求,可以设计不同的运动控制算法,如速度环控制、位置环控制等。
4.保护机制设计:为了保护步进电机和控制系统,设计合适的保护机制。
如过流保护、过压保护、过载保护等。
三、实验验证1.硬件连接:将步进电机、驱动电路和单片机按照设计进行连接。
2.软件调试:通过单片机编程,调试程序代码。
确保脉冲生成、运动控制等功能正常工作。
3.功能测试:对步进电机控制系统进行功能测试,包括正转、反转、加速、减速等功能。
通过观察步进电机的运动状态和测量相关参数来验证系统设计的正确性和性能。
单片机课程二维步进电机控制系统教程文件

目录第1章绪论 (3)1.1 课题背景................................................................... 错误!未定义书签。
1.1.1 引言 (3)第2 章二维步进电机控制系统的选择............................ 错误!未定义书签。
2.1 基于单片机的控制…............................................. 错误!未定义书签。
2.2 步进电机的概述 (3)2.3 控制电路的设计图 (4)第3 章系统的硬件设计 (5)3.1 系统设计方案的简述 (5)3.2 基于80C51的步进电机执行结构及原理... (5)3.3 辅助控制电路 (6)第4章系统的软件设计 (8)4.1 系统的主流程图 (9)4.2 汇编程序设计 (10)结论 (12)参考文献 (13)第1章绪论1.1引言随着数字化技术发展,数字控制技术得到了广泛而深入的应用。
步进电机是一种将数字信号直接转换成角位移或线位移的控制驱动元件, 具有快速起动和停止的特点。
因为步进电动机组成的控制系统结构简单,价格低廉,性能上能满足工业控制的基本要求,所以广泛地应用于手工业自动控制、数控机床、组合机床、机器人、计算机外围设备、照相机,投影仪、数码摄像机、大型望远镜、卫星天线定位系统、医疗器件以及各种可控机械工具等等。
直流电机广泛应用于计算机外围设备( 如硬盘、软盘和光盘存储器) 、家电产品、医疗器械和电动车上, 无刷直流电机的转子都普遍使用永磁材料组成的磁钢, 并且在航空、航天、汽车、精密电子等行业也被广泛应用。
在电工设备中的应用,除了直流电磁铁(直流继电器、直流接触器等)外,最重要的就是应用在直流旋转电机中。
在发电厂里,同步发电机的励磁机、蓄电池的充电机等,都是直流发电机;锅炉给粉机的原动机是直流电动机。
此外,在许多工业部门,例如大型轧钢设备、大型精密机床、矿井卷扬机、市内电车、电缆设备要求严格线速度一致的地方等,通常都采用直流电动机作为原动机来拖动工作机械的。
《2024年基于单片机的步进电机控制系统的设计与实现》范文

《基于单片机的步进电机控制系统的设计与实现》篇一一、引言随着科技的不断发展,步进电机控制系统在各个领域得到了广泛的应用。
基于单片机的步进电机控制系统因其高效、可靠和低成本的特性,成为许多工程应用的首选。
本文将详细介绍基于单片机的步进电机控制系统的设计与实现过程。
二、系统需求分析首先,我们需要明确步进电机控制系统的基本需求。
系统需要能够精确控制步进电机的运动,包括步进电机的启动、停止、正反转以及速度调节等功能。
此外,系统还应具备实时监控和故障诊断功能,以确保步进电机在运行过程中的安全性和稳定性。
三、硬件设计1. 单片机选择:选择一款性能稳定、功能强大的单片机作为主控制器,如8051系列单片机。
2. 步进电机选择:根据实际需求选择合适的步进电机,包括电机类型、尺寸、精度等参数。
3. 驱动电路设计:为了驱动步进电机,需要设计一个步进电机驱动电路。
该电路应包括电机电源、驱动芯片及相应的保护电路。
4. 接口电路设计:设计单片机与上位机通信的接口电路,如串口通信电路。
同时,还需要设计单片机与步进电机驱动电路的连接电路。
四、软件设计1. 单片机程序设计:编写单片机的控制程序,实现步进电机的启动、停止、正反转及速度调节等功能。
程序应采用模块化设计,便于后期维护和升级。
2. 通信协议设计:设计单片机与上位机之间的通信协议,确保数据的准确传输。
通信协议应包括数据格式、传输速率、校验方式等内容。
3. 实时监控与故障诊断:通过软件实现实时监控和故障诊断功能,及时发现并处理系统故障,确保步进电机的安全运行。
五、系统实现1. 硬件制作与组装:根据硬件设计图纸制作电路板,并将各元器件焊接到电路板上,完成硬件组装。
2. 软件调试与优化:将编写好的单片机程序烧录到单片机中,进行系统调试和优化,确保系统各项功能正常运行。
3. 系统测试与验收:对系统进行全面的测试和验收,包括功能测试、性能测试、稳定性测试等。
确保系统满足设计要求,并具备较高的可靠性和稳定性。
步进驱动液压工作台的控制系统设计设计说明
毕业设计题目:步进驱动液压工作台的控制系统设计摘要摆动碾压是汽车轮毂轴承单元铆合装配的一种新兴的压力加工方法,本文在调查研究国外类似装置的功能、结构、特点和发展应用情况的前提下,结合摆辗技术的基本原理,设计了用于汽车轮毂轴承单元的铆合装配的专用摆碾机床。
根据工艺特点,重点研究了该机床的控制系统,设计出合理的控制系统原理图,搭建控制系统平台,设计基于步进驱动液压工作台的控制系统。
在本控制系统中,选用AVR单片机作为下位机,单片机作为控制系统的核心,控制步进电机的运转,以实现相应的工艺动作。
本文完成控制系统软硬件设计,进行软硬件的调试实验,通过运行调试,该系统成功应用于摆碾旋压设备,运行稳定可靠。
关键词:轮毂轴承单元;铆合装配;步进电机;AVRAbstractOscillating roller is the automobile hub bearing unit riveting assembly of a new pressure processing method, based on the investigation and study of domestic and foreign similar device function, structure, characteristics and the development of application conditions, combined with the rotary forging technology basic principle, design for automobile wheel hub bearing unit riveting assembly for swinging grinding machine tool. According to process characteristics, focus on the machine toolcontrol system, design a reasonable the principle diagram of control system, building control system design based on the platform, stepping driving hydraulic platform control system. In this control system, using AVR MCU as the next machine, single chip microcomputer as the control core of the system, control of stepper motor running, to achieve the corresponding action. This paper completes the control system hardware and software design, software and hardware debugging experiment, through debugging, the system was successfully applied to a pendulum roller spinning equipment, stable and reliable operation.Key words: hub bearing unit; riveting assembly; stepping motor; AVR目录摘要1Abstract1目录2第一章绪论31.1 引言31.2 本课题的研究意义与主要任务41.3 最新汽车轮毂轴承铆接工艺应用41.4 铆接机铆接质量情况与旋压铆合技术的优越性51.5 汽车轮毂轴承单元的国外情况调查71.6 汽车轮毂轴承单元的发展和前景11第二章摆动辗压基本原理与工艺点122.1 摆动辗压的原理122.2 摆动辗压的特点142.3 摆辗旋压设备总体方案152.3.1摆辗机的主要技术指标152.3.2 总体方案的论证设计152.3.3 运动功能分析182.3.4 机床总体结构布局设计18第三章机床的总体方案和工作台结构设计193.1机床总体方案设计193.2主要部件设计计算203.2.1丝杆的设计203.2.2滚动轴承的选则与校核243.2.3丝杆的强度计算和稳定性计算25第四章步进电机工作原理与电机选型264.1 步进电机原理分析264.2 步进电机产生振动的原因284.3 抑制步进电机产生振动的办法与措施294.4 步进电机计算与选型294.5 90BYG4501的参数30第五章控制系统硬件电路设计325.1微控部分(模拟模式)325.2 M16的引脚说明345.3系统板355.3.1 复位部分355.3.2 晶振电路的设计365.3.3 ISP下载接口设计375.3.4 串口通信375.4驱动板39第六章控制系统程序设计396.1 系统流程图设计396.2 程序清单40第七章总结43致43参考文献44第一章绪论1.1 引言近年来,汽车工业迅速发展,汽车轮毂轴承单元的制造技术在不断发展,将旋压用于轮毂轴承单元的轴铆合装配,是当前轮毂单元制造技术的最新进展。
单片机步进电动机控制系统设计

单片机步进电动机控制系统设计一、引言步进电动机在工业自动化领域中被广泛应用,其精准的位置控制和良好的稳定性使其成为许多系统中的理想选择。
单片机作为控制核心,可以实现对步进电动机的高效控制。
本文将介绍单片机步进电动机控制系统的设计方案,涵盖系统结构、控制原理、软件算法和性能分析等内容。
二、系统结构单片机步进电动机控制系统由单片机模块、驱动模块、步进电动机以及传感器等部分组成。
单片机负责接收外部指令或信号,根据控制算法生成控制信号,驱动模块将控制信号转换为电流驱动步进电动机,从而实现步进电动机的转动。
传感器用于反馈步进电动机的实际位置信息,闭环控制可以提高系统的精度和稳定性。
三、控制原理步进电动机控制的关键是确定步进角度和控制脉冲频率。
常见的控制方法包括脉冲计数控制、矢量控制和微步控制等。
单片机通过控制输出端口产生脉冲信号驱动步进电动机,根据旋转方向、速度和步距控制脉冲的频率和顺序,实现步进电动机的精确控制。
四、软件算法在单片机步进电动机控制系统中,软件算法的设计至关重要。
常用的算法包括简单的正转、反转控制算法、加减速控制算法以及闭环PID 控制算法等。
通过合理设计软件算法,可以实现步进电动机的平稳运行、高速定位和快速响应。
五、性能分析通过对单片机步进电动机控制系统进行性能分析,可以评估系统的定位精度、运行速度、稳定性和抗干扰能力等指标。
同时,还可以分析系统的功耗、效率和寿命等方面,为系统优化和改进提供依据。
六、总结单片机步进电动机控制系统设计是一项综合性工程,需要涉及硬件设计、软件编程和控制理论等多个方面知识。
通过合理设计系统结构、控制原理和软件算法,可以实现步进电动机的精确控制和高效运行。
希望通过本文的介绍,读者能够深入了解单片机步进电动机控制系统的设计原理和方法,为实际工程应用提供参考和指导,推动工业自动化技术的发展和应用。
数控通用二维平台设计及单片机控制系统
目录第一章总体方案设计 (1)1.1 机械传动部件的选择 (1)1.2 控制系统的设计 (1)第二章机械传动部件的计算与选型 (2)2.1 直线滚动导轨副的计算与选型 (2)2.2 滚珠丝杠螺母副的计算与选型 (2)2.3 步进电动机减速箱的使用 (4)2.4 步进电动机的计算与选型 (5)2.5 联轴器的选用 (8)第三章微机数控硬件电路设计 (9)3.1 MCS—51系列单片机简介 (10)3.1.1 MCS—51系列指令系统简介 (10)3.1.2 定时器/计数器 (10)3.1.3 中断系统 (12)3.2 存储器扩展电路设计 (12)3.2.1 程序存储器的扩展 (12)3.2.2 数据存储器的扩展 (13)3.2.3 译码电路设计 (13)3.3 I/O接口电路及辅助电路设计 (15)3.3.1 8155 通用可编程接口芯片 (15)3.3.2 8255 通用可编程接口芯片 (17)3.3.3 键盘显示接口电路 (19)3.3.4 电机接口及驱动电路 (20)3.3.5 辅助电路 (20)参考文献 (22)第一章总体方案设计1.1 机械传动部件的选择1、导轨副的选用要设计的X-Y工作台是用来配套轻型的立式数控铣床的,需要承受的载荷不大,但脉冲当量小、定位精度高,因此,决定选用直线滚动导轨副,它具有摩擦系数小、不易爬行、传动效率高、结构紧凑、安装预紧方便等优点。
2、丝杠螺母副的选用伺服电动机的旋转运动需要通过丝杠螺母副转换成直线运动,要满足005.0mm的脉冲当量和01mm的定位精度,滑动导轨无能为力,只有选用滚珠丝杠副才能达.0到。
滚珠丝杠副的传动精度高、动态响应快、运转平稳、寿命长、效率高,预紧可消除反向间隙。
3、减速装置的选用选择了步进电动机和滚珠丝杠副以后,为了圆整脉冲当量,放大电动机的输出转矩,降低运动不见折算到电动机转轴上的转动惯量,可能需要减速装置,且应有消间隙机构。
为此,决定采用无间隙齿轮传动减速箱。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要如今,由于工作台操作简单,精度高,能够满足一般生产需求。
正因为如此,所以它广泛应。
本文主要研究的是两维步进单片机控制工作台的控制部分。
主要的任务就是用单片机实现两个步进电机的正反转和速度的控制。
本控制系统可以由键盘输入运行的步数,由LED 管显示,信号经单片机转换,采用软件对信号进行环形分配,利用光电隔离器进行光电隔离,经功率放大器进行信号的放大,用放大的信号来驱动步进电机的运行。
由各个功能键控制系统的运行,按启动键后,步进电机按照输入的步数进行走步;如在运行期间按停止键,则步进电机停止运行。
工作台的两头都有行程开关,如果超出了极限位置,行程开关闭合,步进电机停止转动,并且蜂鸣器报警。
关键词:工作台;步进电机;单片机AbstractNowadays, The workbench is easy to operate, the precision is high, and it can meet the generally production demand . Just because of this,so it is widely used.Main research of this paper is that the part of control of the two-dimension stepping single-chip microcomputer control workbench. The main task is to realize two stepping motor’s rotating positive and negatively and control of pace with single-chip microcomputer. The running steps are input by keyboard in this control system, displayed by the LED tube. The signal is transformed by single-chip microcomputer . The signal Loop allotter is achieved by software. The photoelectricity seclusion is achieved by Electro-optical disconnector. The signal is enlarged by power Amplifier. Then the signal can run the stepping motor. The system’s run is controlled by functional keys. Stepping motor will run to the given steps if the “start”key is pressed. Meanwhile, stepping motor will stop if the “stop”key is pressed. There are limit switches on the two heads of the workbench, if the workbench go beyond the terminal position, the limit switch is off, the stepping motor will be stop at once, and the buzzer scream.Keywords workbench stepping motor single-chip microcomputer1 绪论 (1)1.1课题研究的背景 (1)1.2工作台的发展现状与方向 (1)1.3本课题研究的范围和意义 (3)1.4步进电机的发展现状 (3)1.5单片机的发展现状 (4)2 控制系统的总体设计 (6)2.1系统总体方案 (6)2.2机械系统 (6)2.3 控制系统设计 (6)2.3.1接口设计 (6)2.3.2控制方案的选择 (7)2.3.3伺服系统设计 (7)3 控制系统的设计方案 (8)3.1 硬件系统设计 (8)3.1.1系统的硬件结构 (8)3.1.2步进电机 (8)3.1.3微处理器的选择 (15)3.1.4键盘操作的接口电路设计 (17)3.1.5显示部分操作的接口和电路设计 (21)3.1.6 报警电路的设计 (24)3.1.7 单片机与PC机的通信 (25)3.1.8系统的抗干扰设计 (26)3.2 软件系统设计 (28)3.2.1 软件结构设计 (28)3.2.2系统的程序流程 (29)结论 (40)致谢 (41)参考文献 (42)附录............................................................................................................... 错误!未定义书签。
1.1课题研究的背景当今社会,随着科技的发展,工作台的应用越来越广泛。
现在的工作台广泛用于焊接,点胶,打孔,包装,取料等各类精密位置控制设备的应用等。
人们对工作台的研究从来没有停止过。
为了满足不同的要求,出现了各式各样的工作台。
例如,用于普通画线用的二维工作台,具有防静电功能的防静电工作台,还有回转工作台可用于分度,用于高精度的加工的纳米微动工作台等。
随着人类的进步,越来越多并且越来越好的工作台将会被制造出来,来满足生产发展的需求。
1.2工作台的发展现状与方向(1)纳米级微动工作台的研究现状及发展趋势纳米级微动工作台为从事纳米科学技术研究提供一维、二维或三维的纳米级微运动,是纳米科学技术研究应必备的关键仪器设备。
现代纳米科学技术的快速发展对微动工作台提出了迫切的更高要求,即在提供大范围运动的前提下,还应具有纳米级的运动精度。
在为纳米科学技术研究提供小范围纳米级精度的微运动时,最常见的是以压电陶瓷PZT作为驱动部件的柔性铰链机构微动工作台,要为纳米科学技术研究提供大范围纳米级精度的微运动时,柔性铰链机构、压电堆、丝杆滑动机构和气浮微动工作台等却都不能满足要求,它们不能同时实现纳米级运动精度和大运动范围。
磁悬浮微动工作台由于运动平台和驱动机构采用非接触的磁悬浮驱动技术,因此,易于实现大范围纳米级微运动,并且消除了摩擦、磨损对运动精度造成的影响。
①纳米级微动工作台的研究现状:I. 柔性铰链式微动工作台柔性铰链微动机构是近年来发展起来的一种新型的微位移机构。
它的特点是结构紧凑、体积很小,可以做到无机械摩擦、无间隙,具有较高的位移分辨率,可达1 nm。
使用压电或电致伸缩器件驱动,可以实现亚微米甚至是纳米级的精度,同时不产生噪音和发热,可适于各种介质环境工作,是精密机械中理想的微位移机构。
已在航空、宇航、微电子工业部门、精密测量和生物工程领域获得重要的应用。
由于它的出现,开创了精度进入纳米的新时代。
II.滚动导轨式微动工作台滚动导轨也是微动工作台中一种常见的导轨形式,它具有行程大,运动灵活、结构简单、工艺性好、容易实现较高的定位精度的优点,采用滚珠导轨作为微动工作台的支承和导向元件,直流伺服电机传动、实现了对自动分步重复光刻机的微定位控制。
III. 磁悬浮式微动工作台磁悬浮式微动工作台由于运动平台和驱动机构采用非接触式的磁悬浮驱动技术,因此没有摩擦力和机械部件的磨损,易于实现高精度、大范围的要求。
②纳米级微动工作台发展趋势及需要解决的问题大范围、高精度是纳米科技对微动工作台提出的新要求,然而大行程和高精度是微动技术中的一对矛盾。
因此微动工作台的未来研究方向应围绕如何解决这一对矛盾展开。
I.多种微运动相结合技术:结合多种微动方法以弥补各自的不足仍然是解决以上问题的主要办法,比如在现有研究已经成熟的各种微动工作台基础上,妥善解决好其中两种或者多种微动工作台间的兼容性,解决好机械结构间的装配误差、多种平台间的定位误差,采用粗动和微动相结合的方法,粗动台用以完成快速大范围,微动工作台实现高精度,也就是说通过微动工作台对粗动工作台由于运动所带来的误差进行精度补偿,以此实现大范围、高精度的要求。
II.新型纳米级微动工作台的研究:运动方向间的交叉耦合严重影响纳米微动工作台的定位精度,因此需进一步研究运动导向结构,从运动原理上有效地消除运动方向间的交叉耦合产生的定位误差,提高纳米级微动工作台的定位精度。
III.改进控制策略,如采用建立迟滞和蠕变数学模型进行开环控制来避免因反馈而可能引起的不稳定问题,采用自适应控制消除建模的误差和参数的不确定性及系统环境的变化等因数对系统精度的影响,提高系统的鲁棒性。
采用模糊控制、神经元网络控制等方法改善系统的非线性和不确定性。
IV.磁悬浮微动工作台性能的进一步提高:在现有磁悬浮微动工作台基础上,充分考虑磁滞非线性、磁饱和以及高次谐波对系统精度的影响,解决运动控制和定位技术,从而实现纳米级精度的大范围运动。
随着微米、纳米科学技术的不断发展,纳米级微动工作台的研究正日益受到国内外的重视。
但因受到机械加工精度、控制精度和机构复杂性等技术水平的制约,其精度和运动范围还受到一定影响,随着对微动工作台的深入研究,结构合理、高精度和高分辨率的微动工作台必将不断问世。
(2)旋转升降式工作台的发展趋势多种多样的升降工作台有着广泛的应用领域。
许多工业企业除了在生产线上或生产线外使用升降工作台以外,往往还利用升降工作台来运送较大的工件。
例如在物资入库的时候,人们可以利用升降工作台首先将成批的钢材运送到指定的货架处,然后再存放到货架的不同规格格层中或者在室外,将工作台升降到合适的工作高度或者将单臂吊之类的起重设备运送到室外让它在室外工作等等。
在2002年的汉诺威博览会上,Bolzoni Auramo有限责任公司推出他们开发生产的移动式升降工作台。
该公司的设计师们设计的升降工作台带有运动装置使升降的物体重通过运动设备的轮子传递到地面,从而可以使升降工作台在任何器要它的地点发挥作用。
这种移动式的结构设计也可“移植”到超薄型升降工作台的设计中。
尤其是在汽车制造业中使用更为频繁。
这种升降工作台不需要液压驱动系统,几乎不需要维护保养。
早在20年前, Flexlift公司就研制开发出了机械式升降工作台。
但是在今天机电一体化驱动技术取得了重大进步之后, 才使机械式升降工作台也有了较大的发展。
1.3本课题研究的范围和意义本课题研究的是X-Y工作台的控制部分,主要的任务就是通过单片机实现对两个步进电机的控制。
包括速度,转向等的控制。