超声波程序流程图
超声波模块原理流程图用英语

超声波模块原理流程图用英语Ultrasonic Module Operating Principle Flowchart.The ultrasonic module operates based on the principles of piezoelectricity and the propagation of sound waves. The central components of the module are the ultrasonic transducer, which serves both as a transmitter and a receiver. This transducer converts electrical signals into mechanical vibrations, generating ultrasonic waves, and vice versa, converting reflected ultrasonic waves back into electrical signals.Here's a detailed flowchart of the ultrasonic module's operating principle:1. Power-on Initialization: When the ultrasonic module is powered on, it goes through an initialization process, setting up internal parameters and preparing for operation.2. Signal Generation: The module generates anelectrical pulse signal, typically with a frequency matching the resonance frequency of the transducer. This signal is used to drive the transducer.3. Transducer Activation: The electrical pulse signal is applied to the transducer, exciting its piezoelectric element. This causes the transducer to vibrate at its resonant frequency, generating ultrasonic waves.4. Ultrasonic Wave Propagation: The generatedultrasonic waves propagate outward from the transducer in a spherical pattern. These waves travel through the air at a speed typically around 340 m/s, depending on the temperature and other environmental conditions.5. Object Detection: As the ultrasonic waves travel, they encounter objects in their path. When these waves hit an object, they are partially reflected back towards the transducer.6. Ultrasonic Wave Reception: The transducer, now acting as a receiver, detects the reflected ultrasonicwaves. These waves cause the transducer to vibrate, generating an electrical signal.7. Signal Processing: The received electrical signal is then processed through amplification, filtering, andanalog-to-digital conversion. This processing enhances the signal quality, removing noise and other interference.8. Time Measurement: The time taken for the ultrasonic waves to travel from the transducer to the object and back is measured. This time measurement is crucial for calculating the distance to the object.9. Distance Calculation: Using the measured time and the known speed of sound in the medium (typically air), the distance to the object is calculated. The formula for this calculation is: Distance = (Speed of Sound Time) / 2.10. Output Generation: The calculated distance is then output by the module, typically as a digital signal or an analog voltage. This output can be used by other systems or devices for further processing or decision-making.11. Continuous Monitoring: The module can continuously monitor for objects by repeating the signal generation, transducer activation, wave propagation, reception, signal processing, time measurement, distance calculation, and output generation steps. This allows for real-time distance measurement and object detection.In summary, the ultrasonic module operates by generating and transmitting ultrasonic waves, receiving the reflected waves from objects, processing the received signal, measuring the time taken for the waves to travel, calculating the distance to the object, and finally, outputting the measured distance. This process enables the module to detect objects and measure distances accurately and reliably.。
超声波检验作业指导书(规范)

超声波检验作业指导书要点l.工程概况及工程量1。
1。
工程概况:主要介绍工程名称、规模、特点及施工环境。
1。
2.工程量:分类统计需进行超声波检验的焊接接头的名称、规格、数量。
2。
编制依据:列出与超声波探伤相关的所有设计图纸,技术、质量、安环相关的规程、规范。
3。
作业活动中的组织分工和人员职责3.1作业的组织分工(与相关作业和其他专业的分工)明确检验委托、检验作业、结果反馈的责任部门和传递渠道。
3。
2作业人员的职责(空表格)列出参加超声波检验工作人员的岗位名称和职责,应包括技术员、班组长、检验作业人员。
4。
作业前必须具备的条件和应作的准备:4.1技术准备4。
1。
1接受委托并察看现场(审核委托项目是否齐全、条件是否具备)4.1。
2根据委托和通用工艺文件编制工艺卡(至少应包括以下方面)a)采用的探伤系统(仪器和探头的组合)b)采用的标准试块和对比试块c)耦合剂d)探伤面的准备e)时基线和探伤灵敏度的调整f)扫查方式g)评定标准h)安全注意事项4.1.3对作业人员进行安全技术交底.4。
1.4制作距离—波幅曲线4.1.5按工艺卡准备探伤面4。
1。
6仪器、探头、耦合剂的准备4.2.作业人员的资格和要求:4.2.1. 探伤人员必须持有电力工业无损检测人员资格证书,且在有效期内.探伤报告必须由Ⅱ级或Ⅱ级以上的超声波探伤人员签发。
4。
2。
2 检验辅助工必须经过安全和专业技能培训,合格后方可上岗。
4.2.3。
作业过程中要认真按作业指导书和工艺卡进行检验。
4.2。
4。
作业人员必须遵守现场安全规程和其它有关规定.对不具备安全作业条件时探伤人员有权停止工作。
4.2.5. 人员最低配备:持证超声波探伤人员3名(Ⅱ级人员不少于2名);检验辅助工6名。
4。
3作业机具(包括配置、等级、精度等)4。
3.1所配备的工器具(主要列出标准试块、对比试块、探头和常用工具)。
4.3。
2所需仪器、仪表的规格和精度(超声波探伤仪、超声波测厚仪等)4.4材料耦合剂、砂纸及相关材料4。
超声波实验报告
电子电路实验3 综合设计实验总结报告题目:班级:学号:姓名:成绩:日期:摘要为了研究和利用超声波,人们已经设计和制成了许多超声波发生器。
本设计就是基于51系列单片机利用超声波的测距系统。
本作品硬件部分主要由单片机系统及显示电路、超声波发射电路和超声波检测接收电路三部分组成。
采用STC89C51来实现对CX20106A红外接收芯片和TCT40-10系列超声波转换模块的控制。
软件部分主要由主程序、超声波发生子程序、超声波接收中断程序及数码管显示子程序等部分组成。
单片机通过P1.0引脚经反相器来控制40KHz的超声波的发送,然后单片机不停的检测INT0引脚,当INT0引脚的电平由高电平变为低电平时就认为超声波已经返回。
计时器所计的数据就是超声波所经历的时间,通过换算就可以得到传感器与障碍物之间的距离,并将距离在数码管上显示出来。
基于单片机的超声波测距系统电路设计简单,能够实时显示,精度高,操作简单易懂。
一.设计选题基于超声波的障碍物检测系统的设计实现二.设计任务及要求结合单片机最小系统和其他模块电路设计一个基于超声波的障碍物检测系统。
1.能够检测前方一米左右是否有障碍,并用指示灯或数码管显示出来。
2.用数码管显示障碍物的精确距离,精度10%以内,最小距离1.0米。
三.系统概述1.超声波测距原理声波是指频率超过20KHz的机械波,在其传播介质中被定义为纵波。
当声波受到尺寸大于其波长的目标物体阻挡时就会发生反射;反射波称为回声。
假如声波在介质中传播的速度是已知的,而且声波从声源到达目标然后返回声源的时间可以测量得到,从声波到目标的距离就可以精确地计算出来。
这就是本系统的测量原理。
这里声波传播的介质为空气,采用40KHz的不可见的超声波。
2.超声波传感器原理压电超声波转换器的功能:利用压电晶体谐振工作。
内部结构上图所示,它有两个压电晶片和一个共振板。
当它的两极外加脉冲信号,其频率等于压电晶片的固有振荡频率时,压电晶片将会发生共振,并带动共振板振动产生超声波,这时它就是一超声波发生器;如没加电压,当共振板接受到超声波时,将压迫压电振荡器作振动,将机械能转换为电信号,这时它就成为超声波接受转换器。
超声波设计
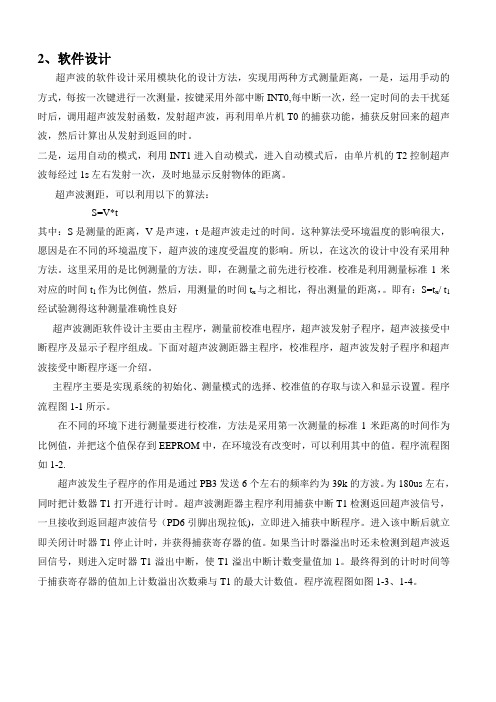
2、软件设计超声波的软件设计采用模块化的设计方法,实现用两种方式测量距离,一是,运用手动的方式,每按一次键进行一次测量,按键采用外部中断INT0,每中断一次,经一定时间的去干扰延时后,调用超声波发射函数,发射超声波,再利用单片机T0的捕获功能,捕获反射回来的超声波,然后计算出从发射到返回的时。
二是,运用自动的模式,利用INT1进入自动模式,进入自动模式后,由单片机的T2控制超声波每经过1s左右发射一次,及时地显示反射物体的距离。
超声波测距,可以利用以下的算法:S=V*t其中:S是测量的距离,V是声速,t是超声波走过的时间。
这种算法受环境温度的影响很大,愿因是在不同的环境温度下,超声波的速度受温度的影响。
所以,在这次的设计中没有采用种方法。
这里采用的是比例测量的方法。
即,在测量之前先进行校准。
校准是利用测量标准1米对应的时间t1作为比例值,然后,用测量的时间t x与之相比,得出测量的距离,。
即有:S=t x/ t1 经试验测得这种测量准确性良好超声波测距软件设计主要由主程序,测量前校准电程序,超声波发射子程序,超声波接受中断程序及显示子程序组成。
下面对超声波测距器主程序,校准程序,超声波发射子程序和超声波接受中断程序逐一介绍。
主程序主要是实现系统的初始化、测量模式的选择、校准值的存取与读入和显示设置。
程序流程图1-1所示。
在不同的环境下进行测量要进行校准,方法是采用第一次测量的标准1米距离的时间作为比例值,并把这个值保存到EEPROM中,在环境没有改变时,可以利用其中的值。
程序流程图如1-2.超声波发生子程序的作用是通过PB3发送6个左右的频率约为39k的方波。
为180us左右,同时把计数器T1打开进行计时。
超声波测距器主程序利用捕获中断T1检测返回超声波信号,一旦接收到返回超声波信号(PD6引脚出现拉低),立即进入捕获中断程序。
进入该中断后就立即关闭计时器T1停止计时,并获得捕获寄存器的值。
如果当计时器溢出时还未检测到超声波返回信号,则进入定时器T1溢出中断,使T1溢出中断计数变量值加1。
超声波测距(高度定位控制和测量系统)3图俱全

目录摘要 (2)第一章系统总体设计方案 (4)1.1 超声波测距原理 (4)1.2 超声波测距系统 (4)第二章系统的硬件设计 (5)2.1 超声波发生电路 (5)2.2 超声波接收电路 (6)2.3 温度的补偿 (8)2.4 LED动态显示电路 (8)第三章系统软件设计 (9)3.1 主程序结构 (10)3.2 中断程序结构 (11)3.3回波接收程序 (11)第四章误差分析 (12)4.1.时间误差 (12)4.2.超声波传播速度误差 (12)第五章调试 (12)第六章整机原件清单 (13)第七章总结 (13)7.1设计任务完成情况 (13)7.2 心得体会 (14)参考文献 (15)附录一 (16)附录二 (17)附录三 (18)摘要高度定位控制和测量系统也就是我们常说的超声波测距。
由于超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声波经常用于距离的测量,如测距仪和物位测量仪等都可以通过超声波来实现。
而电子技术及压电陶瓷材料的发展,使高度定位控制和测量系统得到了迅速的发展。
超声测距是一种非接触式的检测技术。
与其它方法相比,它不受光线、被测物处于黑暗、有灰尘、烟雾、电磁干扰、有毒等恶劣的环境下有一定的适应能力。
因此在液位测量、机械手控制、车辆自动导航、物体识别等有广泛应用。
特别是应用于空气测距,由于空气中波速较慢,其回波信号中包含的沿传播方向上的结构信息很容易检测出来,具有很高的分辨率,因而其准确度也较其它方法为高;而且超声波传感器具有结构简单、体积小、信号处理可靠等特点。
关键字:传感器、测距、测量系统、设计、高度定位PICKHighly positioning control and measurement system is also we often say the ultrasonic ranging. Due to the strong, the energy consumption of ultrasonic directivity slowly in the medium of communication, distance, and is often used to measure the distance of ultrasonic, such as rangefinder and material level measurement instrument etc can all through the ultrasonic. And electronic technology and the development of piezoelectric ceramic materials, high positioning control and measuring systems have been developed rapidly.Ultrasonic ranging is a non-contact detection technologies. Compared with other methods, it is light and darkness, the analyte in dust, smoke, electromagnetic interference, toxic etc harsh environments have certain ability to adapt. Therefore, in robot control level measurement, vehicle navigation, automatic object recognition is widely used. Especially the application in the air, the air velocity range due to low, the echo signal along the direction of propagation of contains information on the structure, very easily with high resolution, and its accuracy is higher than other methods for, And the ultrasonic sensor has simple structure, small volume, the characteristic such as being reliable signal processing.Key words: sensor, and measurement system, the design, the high position第一章系统总体设计方案1.1 超声波测距原理超声波测距的原理是利用超声波在空气中的传播速度为已知,测量声波在发射后遇到障碍物反射回来的时间,根据发射和接收的时间差计算出发射点到障碍物的实际距离。
超声波测距 含51单片机程序与电路图1
超声波测距摘要该超声测距系统采用芯片STC89C52作为系统的主控制器,利用NE555作为本系统的脉冲发射源,结合3位7段数码管液晶显示,达到了较大的测试距离和较高的测量精度,并能实时显示且无明显失真。
关键字: 超声波测距实时第1章设计题目与要求1.1 设计要求采用压电式超声波换能器,使用单片机作为控制器,完成超声波测距仪的软硬件设计。
1.2 基本要求:(1)具有反射式超声波测距功能,测量距离0.1m~3.0m;(2)测量距离精度:误差±1cm;(3) 利用LED数码管显示测试距离;(4)实时显示测量的距离,显示格式为:□.□□米第2章系统总体方案论证2.1 系统总体方案题目要求设计一个利用超声波反射原理测量距离的超声波测距仪,并且具有实时同步显示,由此本系统可以划分为发射、接收、显示、主控制模块共四大模块,如图2.1所示:图2.1系统基本方框图针对技术指标的需要,为使系统的测量距离更远、精度更高,提高系统的整体完善性,现对以上系统各个功能模块进行一一的方案论证:2.2 主控制模块2.2.1 主控制模块概述主控制器模块其实就是一个简化的嵌入式系统。
嵌入式系统一般指非PC系统,有计算机功能但又不称之为计算机的设备或器材。
它是以应用为中心,软硬件可裁减的,适应应用系统对功能、可靠性、成本、体积、功耗等综合性严格要求的专用计算机系统。
嵌入式系统的核心是嵌入式微处理器。
2.2.2 主控制模块方案选择根据以上知识,考虑到目前市场上比较常用的AVR、61、51三种微控制器,我们有如下三种方案可供选择。
方案一:AVR单片机AVR单片机种类丰富,有AT tiny、AT90S、ATmeg系列,各个系列又有不同的型号,价格较适中。
相对来说,比起51单片机来说资源较丰富,内部也有集成A/D ,有PWM 输出,但在系统进一步扩展方面不是很好,这类单片机主要应用于工业控制领域,在语音处理方面没有什么优势。
方案二:SPCE061A.凌阳单片机的资源相对来说比较丰富,32K ×16bitFlash ,两路D/A ,1个全双工异步串行口(UART )方便其跟其他为控制通信。
超声波传感器单片机课程设计

课程设计报告题 目 超声波测距系统设计课 程 名 称 单片机原理及应用院 部 名 称 机电工程学院专 业 电气工程及其自动化班 级 12电气工程及其自动化(单)学 生 姓 名学 号课程设计地点 工科楼 C304课程设计学时 20指 导 教 师金陵科技学院教务处制目录一、概述 (3)1.1课程设计应达到的目的 (4)1.2 超声波测距系统设计 (4)二、总体设计方案及说明 (4)2.1系统总体设计思路 (4)2.2系统总体设计框图 (5)三、系统硬件电路设计 (5)3.1 单片机的最小系统 (6)3.1.1AT89C51单片机的功能与特点 (6)3.2系统原理分析 (6)3.2.1超声波测距原理 (6)3.3 超声波传感器检测电路 (6)3.3.1超声波检测电路图 (7)3.3.2 超声波发生及感应过程 (7)3.4 超声波测距接收 (7)3.4.1 HC-SR04模块 (7)3.4.2 T40、R40超声波传感装置介绍 (7)3.5 SCM1602显示模块 (9)四、系统软件部分设计 (11)4.1 软件流程图 (11)4.1.1主程序流程图 (11)4.1.2超声波发生子程序 (11)4.2 系统源程序 (12)五、系统仿真过程与结果 (13)5.1 Proteus仿真软件 (14)5.2仿真编译过程 (14)5.3仿真效果图 (15)六、实物展示 (16)6.1实物元件与过程 (16)6.2实物运行与调试 (15)6.3实物总结 (15)七、总结 (18)八、参考文献 (19)附录,原理图 (20)摘要本设计采用了AT89C51作为中心处理器,HC-SR04模块进行超声波方面的发生与感应。
然后介绍了总体的系统设计框图、思路及元件选型。
接下来,分硬件和软件两部分进行了设计的分析。
硬件方面首先构建了一单片机最小系统,然后集成各芯片完成设计。
软件方面通过外部中断,定时器中断等完成开发的子程序的调用。
课程设计--超声波倒车雷达测距
课程设计设计题目超声波倒车雷达测距目录摘要 (4)第一章绪论 (4)1.1 背景 (4)1.2 目前研究现状分析 (4)1.3 拟解决的关键问题 (4)第二章课程设计目的 (4)第三章课程设计正文 (4)3.1 系统分析 (4)3.2 总体设计 (5)3.3 原理图设计 (9)3.4 软件程序设计 (11)第四章调试方案 (10)第五章项目小组分工 (12)第六章课程设计总结 (12)参考文献 (13)附件1:项目原理图附件2:源程序摘要目前,单片机已经渗透到了我们生活的方方面面。
本系统基于AT89S52单片机,利用超声波模块进行距离的探测,将所测得信号交给单片机进行处理,由1602液晶显示模块进行显示,同时将感应出是否有人体接近。
在危险距离之内还有报警音提示,使模型小车避开障碍物。
关键词:单片机、超声波测距、报警、壁障1绪论:题目:超声波倒车雷达测距1.1背景:倒车雷达的快速发展始于20世纪末21世纪初,经过几年的时间,随着技术发展和用户需求的变化,倒车雷达在几年的时间里大致经过了六代的演变。
第一代:倒车时通过喇叭提醒。
“倒车请注意”!这就是倒车雷达的第一代产品,只要司机挂上倒档,它就会响起。
第二代:采用蜂鸣器不同声音提示驾驶员。
倒车雷达系统的真正开始。
倒车时,如果车后1.8m~1.5m处有障碍物,蜂鸣器就会开始工作。
担对驾驶员帮助不大。
后来又有:数码波段显示具体距离或者距离范围、液晶屏动态显示等。
担这些倒车系统在使用的过程中都有一定的缺陷,汽车尾部与后车轮之间的空间都普遍成了探测的盲区,致使汽车在倒车时都会受到不同程度的刮伤、碰撞等,这是广大爱车族们所不愿意看到的。
1.2目前研究现状分析目前国内做倒车雷达的厂家很多,但是性能都不是很理想,普遍存在倒车雷达探测声波波束较窄,当障碍物偏离探头的正对角度时,存在较大的探测盲区。
对管锥状障碍物探测存在较多的死角。
另外,探测低矮的障碍物也比较困难,高度在50cm以下的障碍物就探测不到了,在很大程度上不能满足广大车主的需求。
超声波测距系统设计(新图)
超声波测距系统设计1. 课程设计目的通过《传感器及检测技术》课程设计,使我们掌握传感器及检测系统设计的方法和设计原则及相应的硬件调试的方法。
进一步理解传感器及检测系统的设计和应用。
2. 内容及要求2.1 设计内容设计一个超声波测距系统,通过超声测距仪的原理是根据超声波遇到障碍物反射回来的特性进行测量的。
超声波发射器向某一方向发射超声波,在发射同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即中断停止计时。
通过不断检测产生波发射后遇到障碍物所反射的回波,从而测出发射超声波和接收到回波的时间差T,然后求出距离L。
基本的测距公式为:L=(△t/2)*C式中L——要测的距离T——发射波和反射波之间的时间间隔C——超声波在空气中的声速,常温下取为340m/s声速确定后,只要测出超声波往返的时间,即可求得L。
2.2 设计要求本次设计采用40KHz的超声波发射和接收传感器测量距离。
可采用发射和接收之间的距离,也可将发射和接收平行放在一起,通过反射测量距离。
实现功能要求:(1) LED数码管显示测量距离,精确到小数点后一位(单位:cm)。
(2) 测量范围:30cm~200cm,(3) 误差<0.5cm。
(4)确保系统的可靠性。
3.系统工作原理设计的整体框图如图1所示,主要由超声波发射,超声波接收与信号转换,按键显示电路与温度传感器电路组成。
超声波测距是通过不断检测超声波发射后遇到障碍物所反射的回波,从而测出发射和接收回波的时间差T,然后求出距离L=CT/2,式中的C为超声波波速。
在常温下,空气中的声速约为340m/s。
由于超声波也是一种声波,其传播速度C与温度有关,在使用时,如果温度变化不大,则可认为声速是基本不变的。
因为本系统测距精度要求很高,误差<0.5cm,所以通过对温度的检测对超声波的传播速度加以校正。
超声波传播速度确定后,只要测得超声波往返的时间,如图2所示,即可求得距离。
B超机操作流程图

掌握利用B超机进行常见疾病诊断的 方法和技巧,如肝、胆、脾、胰等腹 部脏器疾病的超声诊断。
拓展学习资源推荐
专业书籍
推荐阅读《医学超声影像学》、《超声医学》等专业书籍,深入了解B超机的原理和应 用。
在线课程
推荐参加中国大学MOOC、网易云课堂等在线学习平台上的相关课程,系统学习B超机 的操作技巧和诊断方法。
2023-2026
ONE
KEEP VIEW
XX DESIGN
XX DESIGNB超ຫໍສະໝຸດ 操作流程图XX DESIGN
XX DESIGN
XX
REPORTING
汇报人:XX
2024-01-21
CATALOGUE
目 录
• B超机基本原理与构造 • 患者准备与检查前工作 • 操作步骤详解 • 常见故障排查与处理 • 操作注意事项与安全防护 • 总结回顾与拓展学习
相控阵探头
适用于心脏等运动器官的检查,可实现多角 度、多切面扫描。
凸阵探头
适用于腹部、妇产科等深部器官的检查,具 有较宽的扫描范围和较深的穿透力。
腔内探头
适用于经食道、经阴道等特殊途径的检查, 可提供更清晰的图像和更准确的诊断。
PART 02
患者准备与检查前工作
患者信息核对及沟通
01 核对患者姓名、性别、年龄、检查部位等基本信 息,确保与申请单一致。
定期对B超机进行辐射 安全检测,确保符合国 家标准和规定。
PART 06
总结回顾与拓展学习
关键知识点总结回顾
B超机基本原理
掌握B超机的工作原理,理解超声波在 医学诊断中的应用。
图像调节与优化
学习如何调节B超机的参数以获得清 晰的图像,了解图像优化的基本技巧
超声检测通用工艺规程

超声检测通用工艺规程3.1 适用范围本规程适用于采用A型脉冲反射式超声波探伤仪,对金属原材料、零部件和焊接接头进行超声波检测。
3.2 检测时机3.2.1有延迟裂纹倾向的材料其焊接接头应在焊接完成24小时后才能进行检测。
3.2.2 锻件检测原则上应在热处理后,槽孔、台阶加工前进行。
表面粗糙度Ra≤6.3μm。
3.3 工件要求3.3.1 焊接接头探头移动区应由送检单位清除焊接飞溅、铁屑、油垢及其它杂质,对咬边、较大的隆起和凹陷等应作适当的修磨至圆滑过渡。
3.3.2 原材料及零件部、锻件应由送检单位打磨清除铁屑、锈蚀、油垢等其它杂质。
检测表面应平整光滑、便于探头自由扫查,表面粗糙度Ra应为6.3μm。
3.4探伤仪、探头和系统性能3.4.1 探伤仪采用A型脉冲反射式超声波探伤仪,其工作频率范围为1~5MHz,仪器至少在荧光屏满刻度的80%范围内呈线性显示。
探伤仪具有80dB以上的连续可调的衰减器,步进级每档不大于2dB,其精度为任意相邻12dB误差在±1dB以内,最大累计误差不超过1dB。
水平线性误差不大于1%,垂直线性误差不大于5%。
3.4.2 探头a. 超声检测常用单直探头、单斜探头、双晶探头和聚焦探头等。
b. 晶片有效面积一般不应大于500mm2,且任一边长不应大于25mm。
c. 单斜探头声束轴线水平偏离角不应大于2°,主声束垂直方向不应有明显的双峰。
d. 双晶直探头性能应符合JB/T4730.3-2005附录A的要求。
3.4.3 超声探伤仪和探头的系统性能。
a. 在达到所探工件的最大检测声程时,其有效灵敏度余量应不小于10dB。
b. 仪器和直探头组合的始脉冲宽度:对于频率为5MHz的探头,宽度不大于10mm;对于频率为2.5MHz的探头,宽度不大于15mm。
c. 直探头的远场分辨力应不小于30dB,斜探头的远场分辨力应不小于6dB。
d. 仪器和探头的系统性能应按JB/T9214和JB/T10062的规定进行测试。
超声波测距仪硬件电路设计
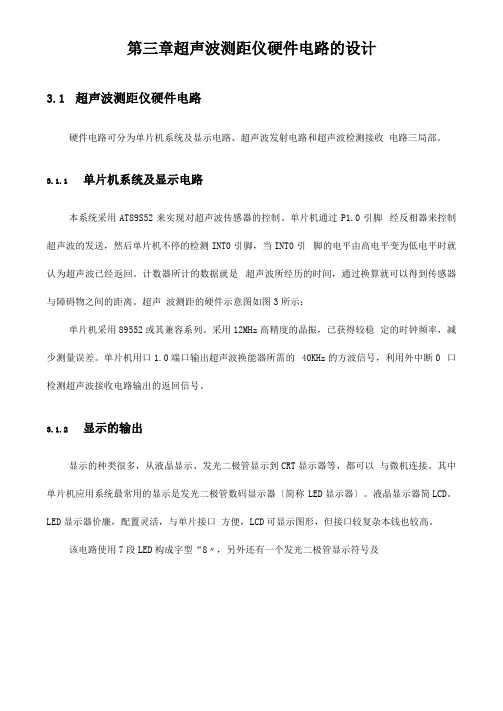
第三章超声波测距仪硬件电路的设计3.1超声波测距仪硬件电路硬件电路可分为单片机系统及显示电路、超声波发射电路和超声波检测接收电路三局部。
3.1.1单片机系统及显示电路本系统采用AT89S52来实现对超声波传感器的控制。
单片机通过P1.0引脚经反相器来控制超声波的发送,然后单片机不停的检测INT0引脚,当INT0引脚的电平由高电平变为低电平时就认为超声波已经返回。
计数器所计的数据就是超声波所经历的时间,通过换算就可以得到传感器与障碍物之间的距离。
超声波测距的硬件示意图如图3所示:单片机采用89552或其兼容系列。
采用12MHz高精度的晶振,已获得较稳定的时钟频率,减少测量误差。
单片机用口1.0端口输出超声波换能器所需的40KHz的方波信号,利用外中断0 口检测超声波接收电路输出的返回信号。
3.1.2显示的输出显示的种类很多,从液晶显示、发光二极管显示到CRT显示器等,都可以与微机连接。
其中单片机应用系统最常用的显示是发光二极管数码显示器〔简称 LED显示器〕。
液晶显示器简LCD。
LED显示器价廉,配置灵活,与单片接口方便,LCD可显示图形,但接口较复杂本钱也较高。
该电路使用7段LED构成字型“8〃,另外还有一个发光二极管显示符号及小数点。
这种显示器分共阳极和共阴极两种。
这里采用共阳极LED 显示块的发 光二极管阳极共接,如下列图3-1所示,当某个发光二极管的阴极为低电平时, 该发光二极管亮。
它的管脚配置如下列图3-2所示。
实际上要显示各种数字和字符,只需在各段二极管的阴极上加不同的电平, 就可以得到不同的代码。
这些用来控制LED 显示的不同电平代码称为字段码〔也 称段选码〕。
如下表为七段1日口的段选码。
表3-1七段1日口的段选码 显示字符共阳极段选码 dp gfedcba显示字符 共阳极段选码dp gfedcba0 C0H A 88H 1 F9H B 83H 2 A4H C C6H 3 B0H D A1H 4 99H E 86H 5 92H F 8EH 682HP8CHVCC图3-1图3-2come d c dp com7 F8H y 91H8 80H 8. 00H9 90H “灭〃FFH本系统显示电路采用简单实用的4位共阳LED数码管,位码用PNP三极管8550驱动。