基于自适应果蝇优化算法的PID参数优化
《2024年基于细菌群觅食优化算法的电液位置系统PID参数寻优研究》范文
《基于细菌群觅食优化算法的电液位置系统PID参数寻优研究》篇一一、引言在工业控制系统中,电液位置系统是关键的组成部分,它决定了系统运行的准确性和效率。
传统的电液位置系统常常采用比例-积分-微分(PID)控制策略来维持其位置稳定和准确度。
然而,PID参数的调整通常是一个复杂且耗时的过程,需要专业的知识和经验。
为了解决这一问题,本文提出了一种基于细菌群觅食优化算法的PID参数寻优方法,以实现对电液位置系统更高效和准确的控制。
二、细菌群觅食优化算法概述细菌群觅食优化算法是一种模拟自然界中细菌觅食行为的优化算法。
它通过模拟细菌在环境中的搜索、移动和繁殖等行为,寻找问题的最优解。
该算法具有并行性、自适应性和全局搜索能力强的特点,适用于解决复杂的优化问题。
三、电液位置系统的PID控制电液位置系统的PID控制是一种常用的控制策略。
它通过调整比例(P)、积分(I)和微分(D)三个环节的参数,实现对系统位置的精确控制。
然而,PID参数的调整往往需要根据系统的实际运行情况进行手动调整,这既耗时又可能无法达到最优的控制效果。
四、基于细菌群觅食优化算法的PID参数寻优为了解决PID参数调整的问题,本文将细菌群觅食优化算法应用于电液位置系统的PID参数寻优。
具体步骤如下:1. 将PID参数的调整问题转化为一个优化问题,定义优化目标和约束条件。
2. 初始化细菌群,每个细菌代表一组PID参数。
3. 根据优化目标,计算每个细菌的适应度值。
4. 根据细菌的适应度值和觅食规则,更新细菌的位置和速度。
5. 反复迭代,直到达到预设的终止条件或适应度值满足要求。
6. 输出最优的PID参数。
通过这种方法,我们可以自动地寻找最优的PID参数,无需手动调整,从而提高了系统运行的准确性和效率。
五、实验与结果分析为了验证本文提出的方法的有效性,我们进行了实验。
实验结果表明,基于细菌群觅食优化算法的PID参数寻优方法能够快速地找到最优的PID参数,使电液位置系统的运行更加准确和高效。
基于自适应果蝇优化算法的PID参数优化

基于自适应果蝇优化算法的PID参数优化
李明辉;曹泽;王玉洁
【期刊名称】《机床与液压》
【年(卷),期】2018(46)20
【摘要】针对基本果蝇优化算法(FOA)控制精度不高且易陷入局部最优的缺陷,提出一种自适应果蝇优化算法(IFOA)的PID参数优化方案.该算法以控制偏差绝对值和输入平方项的时间积分作为适应度函数,经过迭代寻优得到最优的PID参数值.通过二阶时滞系统测试并与基本果蝇优化算法比较,结果表明:该算法控制精度高、响应速度快、鲁棒性好,为PID参数优化提供了参考.
【总页数】4页(P144-147)
【作者】李明辉;曹泽;王玉洁
【作者单位】陕西科技大学机电工程学院, 陕西西安710021;陕西科技大学机电工程学院, 陕西西安710021;上海亚太计算机信息系统有限公司, 上海200040
【正文语种】中文
【中图分类】TP273
【相关文献】
1.基于自适应果蝇优化算法的电地热温度控制系统PID参数优化 [J], 张亭亭;陈大军;王盛慧
2.基于果蝇优化算法的水轮发电机组PID参数优化 [J], 付文秀;苏杰
3.基于果蝇优化算法的PID控制器设计与应用 [J], 赵晓军;刘成忠;胡小兵
4.基于迭代步进值递减的果蝇优化算法在PID整定中的应用 [J], 孙莉莉
5.基于果蝇优化算法的支持向量机参数优化在船舶操纵预报中的应用 [J], 王雪刚;邹早建
因版权原因,仅展示原文概要,查看原文内容请购买。
基于果蝇优化算法的超临界机组主蒸汽温度控制

基于果蝇优化算法的超临界机组主蒸汽温度控制发布时间:2021-05-11T03:09:25.136Z 来源:《中国电业》(发电)》2021年第1期作者:罗家运[导读] 主汽温调节扰动因素过多,影响过程复杂多变,控制过程的可控程度很低,被控对象变量有很多[6]。
广东粤电花都天然气热电有限公司广东广州 510000摘要:主蒸汽温度控制是超临界机组控制系统的重要控制环节。
主蒸汽温度是超临界机组的主要参数,主蒸汽温度过高过低,都将会损坏机组重要设备甚至危及火电机组运行的安全经济性。
由于被控对象具有大惯性、迟延大、干扰因素多等特点[1],传统的的常规串级PID控制器很难实现最佳的控制效果。
果蝇优化算法具有简单容易理解、寻优效率高、收敛可靠性稳定的特点,将其应用于主汽温控制系统PID参数优化中[2]。
通过MATLAB仿真,对主汽温跟踪性能分析。
仿真结果表明,基于果蝇优化算法的FOA-PID控制比传统PID控制响应更快,抗干扰性能和鲁棒性性能更好。
关键词: 超临界机组;主汽温控制;果蝇优化算法;PID参数优化Abstract:Main steam temperature control is an important part of supercritical unit control system. The main steam temperature is the main parameter of supercritical unit. If the main steam temperature is too high or too low, it will damage the important equipment of unit, even endanger the safety and economy of thermal power unit. The controlled object has the characteristics of large inertia, large delay and many interference factors, the traditional cascade PID controller is difficult to achieve the best control effect.Drosophila optimization algorithm has the characteristics of simple and easy to understand, high optimization efficiency and stable convergence reliability. It is applied to PID parameter optimization of main steam temperature control system.To use the MATLAB to analysis the main steam temperature performance. Simulation results show that the FOA-PID control based on fruit fly optimization algorithm response faster than traditional PID control, and has better anti-jamming performance and robustness performance.Key words: Supercritical unit;Main steam temperature control;Fruit fly optimization algorithm; PID parameter optimization0 前言主汽温调节扰动因素过多,影响过程复杂多变,控制过程的可控程度很低,被控对象变量有很多[6]。
基于迭代步进值递减的果蝇优化算法在PID整定中的应用
基于迭代步进值递减的果蝇优化算法在PID整定中的应用孙莉莉【摘要】果蝇优化算法在计算精度和运算速度上比传统方法有着显著的提高,在解空间上可以快速高效地得到全局最优解,但也极易陷入局部最优.为了获得自动电压调节器(AVR)控制系统的最佳PID参数,对果蝇优化算法进行改进,提出了一种迭代步进值递减的果蝇优化算法.使用改进的算法对AVR系统PID参数进行在线整定,仿真结果表明:改进的果蝇优化算法比原算法在PID控制器中获得了更好的控制性能,改进算法具有一定的实用价值.【期刊名称】《石油化工自动化》【年(卷),期】2016(052)006【总页数】4页(P27-30)【关键词】自动电压调节器控制系统;果蝇优化算法;迭代步进值【作者】孙莉莉【作者单位】青岛港湾职业技术学院电气工程系,山东青岛266404【正文语种】中文【中图分类】TP273+.4现代工业生产中的控制对象往往是高阶次、大时滞、非线性的复杂工业流程,同时工业产品质量要求越来越高,因而对控制器的控制精度及控制速度的要求也越来越高。
通用的PID整定方法如ZN法、临界比例度法等[1],对该类系统的参数整定算法复杂、过程繁琐,难以获得最优的控制参数,同时极易发生震荡、超调。
针对该问题,多种整定方法被提出,如粒子群算法[2]、模拟退火算法[3]、遗传算法[4]等。
该类算法具有良好的全局寻优能力,因而被广泛应用;与此同时算法易陷入局部最优,无法满足高精度快速性的要求。
果蝇优化算法[5]FOA(fruit fly optimization algorithm)是由潘文超博士通过对果蝇群体觅食过程的观察于2011年提出的一种全新的群体智能优化算法。
该算法自提出以来就被研究者应用于不同的理论研究工作中,例如基于船舶操纵响应模型的辨识[6];在语音信号盲分离中的应用[7]等。
相对于其他智能优化算法需要调节的参数多达七八个,FOA算法仅有4个可调参数,程序代码简单,便于理解。
基于自适应遗传算法模糊PID控制器参数优化
基于自适应遗传算法模糊PID控制器参数优化
黄伟;朱颖合;薛凌云;宋德运
【期刊名称】《杭州电子科技大学学报》
【年(卷),期】2011(031)003
【摘要】该文针对自适应模糊控制器的多参数优化问题,提出一种自适应遗传算法同时优化模糊规则和隶属函数的方法.先对隶属度函数和控制规则进行联合编码,遗传进化前期采用锦标赛精英保留,后期采用基于轮盘赌的非线性选择方法,保留了种群中较优个体,提高种群的多样性.采用一种自适应交叉变异算子,使交叉变异概率根据进化过程不断自动调整,避免算法过早收敛,加快收敛速度.仿真结果表明,优化后的自适应模糊控制器具有良好的动静态特性.
【总页数】4页(P58-61)
【作者】黄伟;朱颖合;薛凌云;宋德运
【作者单位】杭州电子科技大学,自动化学院,浙江杭州,310018;杭州电子科技大学,自动化学院,浙江杭州,310018;杭州电子科技大学,自动化学院,浙江杭州,310018;杭州禹航电器有限公司,浙江杭州,311121
【正文语种】中文
【中图分类】TP273.4
【相关文献】
1.基于模拟退火和自适应遗传算法的影子定位多参数优化研究 [J], 李梦莹;张祥攀;范梦雨;丁猛;曲凯扬
2.基于自适应遗传算法的隔振系统参数优化计算 [J], 李晓芳;吴洪涛;丁力
3.基于自适应遗传算法的SVM参数优化 [J], 孟滔;周新志;雷印杰
4.基于自适应遗传算法的改进PID参数优化 [J], 刘明;王瑞
5.基于自适应遗传算法的循环工况整车参数优化 [J], 吴素珍;刘成照;梁晓闯;段紫文
因版权原因,仅展示原文概要,查看原文内容请购买。
基于自适应步长的果蝇优化算法

基于自适应步长的果蝇优化算法郭晓东;王丽芳;张学良【摘要】Considering the premature convergence problems of slow optimizing speed,low convergence precision and easy local extremum for standard fruit fly optimization algorithm(SFOA)with the fixed-length step,a new FOA based on adaptive step size,named FOABASS,was presented by analyzing the relation of step size and searching ability of fruit fly.In FOABASS,the step size in search was created on the condition of dynamic step size which varies with current swarm location and evolution generation. Then,the high capacity of new algorithm for finding the global optimum and the balance between global exploration and local exploitation ability was obtained.Finally,simulation results of FOABASS,SFOA algorithm and other modified version show the superiority and the effectiveness of FOABASS.%针对固定搜索步长下标准果蝇优化算法(SFOA)寻优速度慢,收敛精度不高,容易陷于局部极值的不足,通过分析果蝇个体生成机制中搜索步长与算法搜索能力的关系,提出了一种基于自适应步长的改进果蝇优化算法(FOABASS),在该算法中搜索步长随种群当前位置、当前优化代数的变化而变化,由此生成的果蝇群体具备较强的全局勘探能力,同时兼顾全局勘探能力和局部开发能力的平衡。
自适应修改权重参数的果蝇优化算法
( 1 . 河北 工业 大学 计算 机科 学与 软件 学 院 , 天津 3 0 0 4 0 1 ; 2 . 河北省 大数 据计 算重 点 实验 室 , 天津 3 0 0 4 0 1 )
摘 要: 针 对 果蝇优 化算 法容 易陷入 局部 极值 、 迭代 后期 收敛 速度慢 和 收敛精 度低 的缺 陷 , 借 鉴粒 子群 优化 算 法 中个体 认
法 能够 避免 早熟 收敛 , 提高 收敛精 度和 收敛 速度 。基 于测试 函数 的 实验 结 果表 明 , 自适应 修 改权 重 参 数 的果 蝇优 化 算法
能跳出局部极值 , 具有更好的全局搜索能力, 在收敛速度和收敛精度方面比基本果蝇优化算法有较大的提高。
关键 词 : 果 蝇优 化算法 ; 自适 应 ; 迭代步 长 ; 认 知 因子 ; 引导 因子
第2 7卷 第 1 1 期 2 0 1 7发 展
C 0MPU TER I ECHNOL OGY AND DEVEL OPME NT
Vo 1 . 27 No .1 1 NO V. 2 Ol 7
自适应 修 改权 重 参 数 的 果蝇 优 化 算 法
Abs t r a c t : I n v i e w of t h e d e f e c t s o f e a s i l y f a l l i n g i n t o l o c a l e x t r e me , s l o w c o n v e r g e n c e s p e e d i n l a t e r i t e r a io t n a n d l o w c o n v e r g e n c e p r e c i - s i o n f o r f r u i t ly f o p t i mi z a i t o n a l g o r i hm , t a f r ui t ly f o p t i mi z a t i o n a l g o r i t h m b a s e d o n a d a p t i v e mo d i f y i n g we i g h t p a r a me t e r s i s p op r o s e d c o n s i d e r i n g i n d i v i d u a l c o g n i i t v e f a c t o r nd a g r o u p g u i in d g f a c t o r o f p a r t i c l e s wa r l T l o p t i mi z a i t o n . I t i n t r o d u c e s i n iv d i d u l a c o g n i iv t e f a c t o r nd a g r o u p g u i d i n gf a c t o r S Ot ha t h ei t n iv d i d u lh a a s s u ic f i e n t a wa r e n e s s o ni t s o wnpo s i t i o na n dt h e g r o u p h a s a g o o d g u i d e o nt h ei n iv d i d — u ls a . I n e ac h l o o p o f i t e r a i t o n i t d y n a mi c ll a y h a s mo di ie f d s i z e o f c o g n i iv t e f a c t o r nd a g u i d i n g f a c t o r b a s e d o n t h e c u r r e n t v lu a e o f it f n e s s o f he t f r u i t ly f g r o u p a n d r e g u l a t e d i t e r a i t v e s t e p s i z e b y a d a p t i v e me t h d , o wh i c h ma k e s i t a v o i d he t p r e ma t u r e c o n v e r g e n c e nd a i mp r o v e
基于自适应遗传算法的改进PID参数优化
基于自适应遗传算法的改进PID参数优化
刘明;王瑞
【期刊名称】《计算机测量与控制》
【年(卷),期】2015(23)3
【摘要】PID参数设置是决定PID控制性能的关键,为了获取较优的PID控制效果,提出了自适应遗传算法整定和优化PID参数的方法;首先将系统的综合性能控制区分为不同目标的局部性能控制,针对局部目标采用不同的目标函数;之后采用自适应选择、交叉和变异概率对不同控制目标进行PID参数寻优,自适应遗传算法在保持种群多样性的同时能够加快算法收敛;最后通过发动机怠速转速控制应用表明本算法的可行性和有效性:改进的PID控制和遗传算法有效提高了PID参数寻优能力,提高了控制系统的响应能力和稳定性.
【总页数】3页(P791-793)
【作者】刘明;王瑞
【作者单位】中国航空计算技术研究所,西安710119;中国航空计算技术研究所,西安710119
【正文语种】中文
【中图分类】TP368.1
【相关文献】
1.基于自适应遗传算法模糊PID控制器参数优化 [J], 黄伟;朱颖合;薛凌云;宋德运
2.基于自适应遗传算法的PID调速系统参数优化 [J], 万星;李伟;乐丰
3.改进的自适应遗传算法在控制器PID参数优化中的应用 [J], 张世华
4.基于自适应遗传算法的控制器PID参数优化研究 [J], 崔艳超;陈虎
5.基于自适应遗传算法的控制器PID参数优化研究 [J], 崔艳超;陈虎
因版权原因,仅展示原文概要,查看原文内容请购买。
基于自适应果蝇优化算法的电地热温度控制系统PID参数优化
基于自适应果蝇优化算法的电地热温度控制系统PID参数优
化
张亭亭;陈大军;王盛慧
【期刊名称】《工业控制计算机》
【年(卷),期】2018(031)009
【摘要】针对传统PID控制器的参数选取直接影响到电地热在温度控制过程中的稳定性、超调量以及调节时间问题,提出了一种新的自适应果蝇优化算法的PID参数整定方法.该算法在果蝇搜索过程中对搜索算子的变异概率操作进行自适应调整,通过函数测试证明提出的自适应果蝇优化算法比传统的果蝇优化算法收敛速度快和寻优效率高,并将改进的果蝇优化算法应用到电地热温度控制系统PID整定上.仿真结果证明,提出的自适应果蝇优化算法的PID参数整定方法比传统的PID整定方法具有更好的控制效果,即调节时间短、稳定性好.
【总页数】3页(P63-65)
【作者】张亭亭;陈大军;王盛慧
【作者单位】长春工业大学电气与电子工程学院,吉林长春 130012;长春煤炭设计研究院,吉林长春 130012;长春工业大学电气与电子工程学院,吉林长春 130012【正文语种】中文
【相关文献】
1.基于果蝇优化算法的水轮发电机组PID参数优化 [J], 付文秀;苏杰
2.基于果蝇优化算法的PID控制器设计与应用 [J], 赵晓军;刘成忠;胡小兵
3.基于迭代步进值递减的果蝇优化算法在PID整定中的应用 [J], 孙莉莉
4.基于自适应果蝇优化算法的PID参数优化 [J], 李明辉;曹泽;王玉洁
5.基于果蝇优化算法的支持向量机参数优化在船舶操纵预报中的应用 [J], 王雪刚;邹早建
因版权原因,仅展示原文概要,查看原文内容请购买。
果蝇优化算法的分析

果蝇优化算法的分析韩虎【摘要】本文针对果蝇优化算法FOA由于参数选取不合理而导致运行时间长或陷入局部最值的问题,研究了果蝇优化算法主要参数对算法运行时间、优化性能和收敛速度的影响.以FOA全局寻优6个标准测试函数最小值为例,在不同的参数配置下,进行仿真实验,对比分析研究得出果蝇优化算法各主要参数对算法性能影响的定性结论,并给出了各参数恰当的合理取值区间,以便在算法性能和运行时间之间找到最好的平衡.试验结果表明,参数的合理设置,不但缩短了算法的运行时间,而且使算法具有较快的收敛速度和较高的收敛精度.【期刊名称】《计算机系统应用》【年(卷),期】2017(026)002【总页数】9页(P9-17)【关键词】果蝇优化算法;群体智能;参数分析;优化性能;收敛速度【作者】韩虎【作者单位】兰州交通大学电子与信息工程学院,兰州730070【正文语种】中文果蝇优化算法(Fruit Fly Optimization Algorithm, FOA)由中国台湾学者潘文超博士于2011年6月首次提出, 由于算法本身的良好性能, 尤其是该算法是迄今为止所需调整参数最少、进化方程最简单[1-10]的一种群智能优化算法, 自提出以来, 就得到了国内外学者的广泛关注, 吸引了越来越多不同背景研究人员的注意力[11-34],成为交叉学科中一个前沿性研究问题.智能算法合理的参数取值对算法性能至关重要, 但参数之间的相互影响、相互之间的复杂关系及对算法性能的叠加影响很难研究清楚, 一般都是针对具体的研究问题, 通过大量实验总结出来的经验数值, 但参数的取值不当, 会严重影响算法的性能, 并且导致分析算法复杂度变得异常困难.本文首先分析了果蝇优化算法FOA的时间复杂度, 然后对该算法的3个可调整参数: 种群规模、迭代步进值和最大迭代次数分别进行分析研究, 其中主要包括各参数取值对算法收敛速度、收敛精度以及算法时间复杂度的影响. 以求6个基准测试函数最小值为例进行仿真试验, 得出各参数对算法性能及算法时间复杂度影响的定性结论; 并就各参数的最优取值, 给出了通过大量试验总结出来的比较恰当的经验数值作为参考.1.1 觅食行为描述果蝇本身在感官知觉上优于其他物种, 尤其是在嗅觉与视觉上. 果蝇的嗅觉器官能很好地搜集飘浮在空气中的各种气味, 甚至能嗅到40公里以外的食物源. 然后, 飞近食物位置后亦可使用敏锐的视觉发现食物与同伴聚集的位置, 并且往该方向飞去[2]. 自然界生活的一群果蝇, 在整个觅食过程中, 首先, 各自发挥自己的嗅觉优势, 搜集漂浮在空气中的各种气味, 判定优质食物源的方向, 然后, 朝该方向飞去; 最后, 等飞近食物位置后, 再通过敏锐的视觉靠近食物源与同伴聚集的准确位置.1.2 基本步骤果蝇优化算法FOA是通过模拟自然界果蝇群体觅食行为而提出的一种基于群体智能的全局随机搜索算法, 果蝇群体迭代觅食过程示意图如图1所示. 该算法将种群的全局搜索和个体的信息交换相结合, 在全局搜索基础上, 通过个体的信息交换, 更新全局最优解, 最终在满足最大迭代次数或收敛目标精度条件下终止算法.果蝇优化算法归纳为以下几个必要的步骤[1]:(1) 初始化参数: 种群规模, 最大迭代数, 随机初始化果蝇群体位置,;(2) 赋予果蝇个体利用嗅觉搜寻食物之随机方向与距离, 为搜索距离, 即迭代步进值;(3) 由于无法得知食物位置, 因此先估计果蝇个体与原点之距离, 再计算果蝇个体味道浓度判定值, 此值为距离之倒数;(4) 将味道浓度判定值代入味道浓度判定函数(即适应度函数Fitness function), 用来求出果蝇个体的味道浓度;(5) 找出该果蝇群体中味道浓度最佳的果蝇(适用于最小化问题);(6) 记录并保留最佳味道浓度值与其、坐标, 这时候果蝇群体利用视觉向该位置飞去;(7) 进入迭代寻优, 重复执行步骤(2)~(5), 并判断最佳味道浓度是否优于前一迭代最佳味道浓度, 并且当前迭代次数小于最大迭代数, 若是则执行步骤(6).2.1 算法时间复杂度分析在果蝇优化算法FOA中, 种群中的所有个体都要进行迭代搜索, 直至达到最大迭代次数或算法达到收敛目标精度要求为止. 设种群规模为, 最大迭代次数为, 每个个体迭代需要的时间为, 则果蝇优化算法FOA的时间复杂度为. 由于循环体内的计算量, 即每个个体迭代需要的计算量为, 所以FOA算法主要的计算量取决于算法中和的2重循环.2.2 算法参数分析种群规模是群智能优化算法的一个重要参数. 首先, 由上述果蝇优化算法时间复杂度分析可以看出, 当种群规模增大时, 算法的计算时间将会正比增大; 然后从算法原理的直观分析可以得出, 当种群规模增大时, 提高了种群的多样性, 算法的全局搜索能力会增强, 算法的收敛精度会提高, 算法可以尽早找到最优解, 加速收敛速度.最大迭代次数是群智能优化算法的另一个重要参数. 首先, 由果蝇优化算法时间复杂度分析可以得出, 当最大迭代次数增大时, 算法的计算时间也将会正比增大; 并且从算法原理的直观分析可以得出, 当最大迭代次数增大时, 算法收敛到全局最优解的可能性也会增大, 即全局搜索能力也会增强, 算法的收敛精度也会提高.迭代步进值, 即果蝇个体利用嗅觉搜寻食物的随机方向与距离, 是果蝇优化算法特有的一个可调整参数, 它的取值对算法的收敛速度和收敛精度有非常重要的影响. 当迭代步进值增大时, 将会加快算法的收敛速度, 但同时可能会降低算法的收敛精度; 同理, 当迭代步进值减小时, 将会减慢算法的收敛速度, 但同时有可能提高算法的收敛精度.因此, 有必要就各参数取值对算法收敛速度、收敛精度以及算法时间复杂度的影响进行详细的定量分析研究, 并通过仿真试验就各参数的最优取值给出经验数值作为参考.以求6个基准测试函数最小值为例, 进行仿真实验, 对比分析研究果蝇优化算法的各参数对该算法收敛精度、收敛速度及时间复杂度的影响.测试函数名称、函数形式、搜索区间、函数最优值见表1. 测试软件平台为Windows XP, Matlab7.1, 机器主频为P4(1.7G), 内存为1G.3.1种群规模对算法性能的影响种群规模分别取值5, 10, 15, 20, 评估种群规模对算法收敛精度和时间复杂度的影响, 试验中其他参数设置为: 最大进化迭代次数次, 迭代步进值; 随机初始化果蝇群体位置为表1中各函数的搜索区间.将果蝇优化算法FOA全局寻优函数最小值所得的优化均值、平均运行时间和收敛精度相对变化率作为评价指标. 6个测试函数经过50次连续运行后的实验结果如表2所示, 表中优化均值=全局寻优函数最小值的算术平均, 该值体现了算法的收敛精度, 值越小, 说明算法收敛精度越高. 平均运行时间=算法运行时间的算术平均, 即算法运行1次所需的平均时间. 收敛精度相对变化率=(低种群规模对应的优化均值-高种群规模对应的优化均值)/ 低种群规模对应的优化均值, 该值体现了算法的收敛精度随着种群规模增大而提高的幅度, 值越大, 说明算法收敛精度提高的幅度越大. 从中可以看出, 随着种群规模增大, 算法收敛精度提高了, 平均运行时间呈正比增大; 但是, 收敛精度相对变化率却随着种群规模的增大总体呈现下降趋势. 6个测试函数的优化均值随种群规模增大而变化的趋势线如图2所示, 图中纵坐标用优化均值表示, 横坐标为种群规模. 从中也可以看出, 在种群规模增大的初期(5~10), 在所有函数上, 优化均值随种群规模增大单调递减, 并且相对变化率最大, 即算法的收敛精度提高幅度最大; 在种群规模增大的中期(10~15), 优化均值继续随种群规模增大单调递减, 但是相对变化率却在减小; 在种群规模增大的后期(15~20), 在函数和上, 优化均值随种群规模增大继续减小, 但是相对变化率也更小了, 甚至在函数和上, 当种群规模增大时优化均值反而也增大了. 因此, 综合上述分析可以得出以下两个结论: (1)增大种群规模, 必然使得算法运行耗费的计算时间正比增大; (2)虽然增大种群规模, 可以提高算法收敛精度; 但持续一味地增大种群规模, 并未带来算法收敛精度的更进一步显著提高, 这是因为该算法迭代后期易陷入局部最优所致. 因此, 恰当的种群规模可以在算法性能和运行时间之间找到最好的平衡, 本文建议种群规模为10~15之间较为合适.3.2最大迭代次数对算法性能的影响最大迭代次数分别取值10, 50, 150, 500, 1000, 评估最大迭代次数对算法收敛精度和时间复杂度的影响, 试验中其他参数设置为: 迭代步进值, 种群规模, 随机初始化果蝇群体位置为表1中各函数的搜索区间.将果蝇优化算法FOA全局寻优函数最小值所得的优化均值和算法运行时间作为评价指标. 6个测试函数经过50次连续运行后的实验结果如表3所示, 表中优化均值=全局寻优函数最小值的算术平均. 平均运行时间=算法运行时间的算术平均, 即算法运行1次所需的平均时间. 从中可以看出最大迭代次数越大, 优化均值精度(算法收敛精度)越高; 同时, 平均运行时间也呈正比增大. 6个测试函数的优化均值随最大迭代次数增大而变化的趋势线如图3所示, 图中纵坐标用优化均值表示, 横坐标为最大迭代次数. 从中可以看出, 在最大迭代次数增大的初期(10~50), 在所有函数上, 优化均值随最大迭代次数增大单调递减, 并且相对递减幅度最大, 即随着最大迭代次数增大, 算法的收敛精度明显提高了, 而且提高的幅度最大; 在最大迭代次数增大的中期(50~500), 优化均值继续随最大迭代次数增大单调递减, 但是相对递减幅度却在减小; 在最大迭代次数增大的后期(500~1000), 在函数、和上, 优化均值随最大迭代次数增大继续减小, 但是相对递减幅度也更小了, 甚至在函数上, 当最大迭代次数增大时优化均值反而增大了.因此, 综合上述分析可以得出以下两个结论: (1)增大最大迭代次数, 必然使得算法运行耗费的计算时间正比增大; (2)虽然增大最大迭代次数, 可以使算法收敛精度得到提高; 但持续增大最大迭代次数, 并未带来算法收敛精度的持续的进一步明显提高, 这是因为该算法迭代后期易陷入局部最优所致. 因此, 恰当的最大迭代次数可以在算法性能和运行时间之间找到最好的平衡, 本文建议最大迭代次数为500左右比较合适.3.3迭代步进值对算法收敛速度和收敛精度的影响实验中参数设置为: 固定最大进化迭代次数次, 种群规模, 搜索距离分别在三个不同的区间取值: , , , 随机初始化果蝇群体位置为表1中各函数的搜索区间. 评估迭代步进值对算法收敛速度和收敛精度的影响.将果蝇优化算法FOA全局寻优函数最小值所得的优化均值、标准差和收敛速度作为评价指标. 6个测试函数经过50次连续运行后的实验结果如表4所示, 表中优化均值=全局寻优函数最小值的算术平均. 从中可以看出, 当扩大到进行比较时, 优化均值精度得到了比较明显的提高, 即算法的收敛精度明显提高了; 但当扩大到进行比较时, 优化均值精度并没有明显的提高, 而是基本持平, 即算法的收敛精度相当.同时, 可以看出标准差的取值一直比较稳定, 说明算法的稳定性很好. 图4是FOA 的迭代步进值分别在三个不同的区间取值, 全局寻优6个测试函数最小值所得的优化均值对数值进化曲线(注: 为了方便进化曲线的显示和观察, 本文对所有函数的优化均值取以10为底的对数), 图中实线是的优化均值进化曲线, 图中点线是的优化均值进化曲线, 图中虚线是的优化均值进化曲线. 进化曲线也表明, 总体来看, 随着迭代步进值取值区间的扩大, FOA算法收敛速度和收敛精度明显提高了; 图中点线和虚线相对于实线来说, 收敛速度和收敛精度具有较大幅度提高; 但虚线相对于点线来说, 即扩大到进行比较时, 收敛速度和收敛精度基本持平. 因此, 总体来说, 恰当的迭代步进值不但可以使算法具有较高的收敛精度和收敛速度, 而且, 为了有效平衡算法的“探索”和“开发”能力, 基于上述实验结果, 本文建议迭代步进值比较合适.分析了果蝇优化算法的3个可调整参数对算法收敛精度、收敛速度、收敛稳定性和时间复杂度等的影响; 通过大量仿真实验, 分析总结了随着算法参数取值的变化, 果蝇优化算法的各方面性能变化的规律, 并给出了各参数的恰当取值区间, 在算法性能和算法时间复杂度之间找到最好的平衡, 在不增大算法耗费计算机时间资源的情况下, 使算法具有更好的优化性能和更高的实用性.1 Pan WT. A new fruit fly optimization algorithm: Taking the financial distress model as an example. Knowledge-Based Systems, 2012, 26(1): 69–74.2 Elbeltagi E, Hegazy T, Grierson D. Comparison among five evolutionary-based optimization algorithms. Advanced Engineering Informatics, 2005, 19(1): 43–53.3 Dai HD, Zhao GR, Lu JH, Dai SW. Comment and improvement on “A new fruit fly optimization algorithm: Taking the financial distress model asan example”. Knowledge-Based Systems, 2014, 59: 159–160.4 Pan QK, Sang HongY, Duan JunH, Gao L. An improved fruit fly optimization algorithm for continuous function optimization problems. Knowledge-Based Systems, 2014, 62: 69–83.5 Liu CZ, Huang GB, Zhang RZ, Chai Q. A modified fruit fly optimization algorithm with better balance between exploration and exploitation. Proc. of the 2nd International Conference on Progress in Informatics and Computing (PIC-2014). Shanghai. 2014. 55–60.6 潘文超.果蝇最佳化演算法.台北:沧海书局,2011:10–12.7 韩俊英,刘成忠,王联国.动态双子群协同进化果蝇优化算法.模式识别与人工智能,2013,26(11):1057–1067.8 韩俊英,刘成忠.反向认知的高效果蝇优化算法.计算机工程,2013,39(11):223–225.9 韩俊英,刘成忠.基于细菌趋化的果蝇优化算法.计算机应用,2013,33(4):964–966.10 韩俊英,刘成忠.应用反向学习策略的果蝇优化算法.计算机应用与软件,2014,31(4):157–160.11 Zhang YW, Cui GM, Wang Y, Guo X, Zhao S. An optimization algorithm for service composition based on an improved FOA. Tsinghua Science and Technology, 2015, 20(1): 90–99.12 金一. 机刻光栅制造系统结构特性与精度控制研究[博士学位论文].合肥:中国科学技术大学,2013,64–78.13 Sheng W, Bao Y. Fruit fly optimization algorithm based fractional order fuzzy-PID controller for electronic throttle. Nonlinear Dynamics, 2013, 73 (1-2): 611–619.14 Han J, Wang P, Yang X. Tuning of PID controller based on fruit flyoptimization algorithm. International Conference on Mechatronics and Automation(ICMA). 2012. 409–413.15 Liu Y, Wang XJ, Li YJ. A modified fruit-fly optimization algorithm aided PID controller designing. Proc. of 10th World Congress on Intelligent Control and Automation. Beijing. 2012. 233–238.16 Li H, Guo S, Li C, Sun J. A hybrid annual power load forecasting model based on generalized regression neural network with fruit fly optimization algorithm. Knowledge- based Systems, 2013,37: 378–387.17 Li HZ, Guo S, Zhao HR, Su CB, Wang B. Annual electric load forecasting by a least squares support vector machine with a fruit fly optimization algorithm. Energies, 2012, 5: 4430–4445.18 Lin SM. Analysis of service satisfaction in web auction logistics service using a combination of fruit fly optimization algorithm and general regression neural network. Neural Computing & Applications, 2013, 22(3-4): 783–791.19 孙立,董君伊,李东海.基于果蝇算法的过热汽温自抗扰优化控制.清华大学学报(自然科学版),2014,54(10):1288–1292.20 郑晓龙,王凌,王圣尧.求解置换流水线调度问题的混合离散果蝇算法.控制理论与应用,2014,31(2):159–164.21 Zhang P, Wang L. Grouped fruit-fly optimization algorithm for the no-wait lot streaming flow shop scheduling. International Conference on Intelligent Computing. Springer International Publishing. 2014. 664-674.22 Wang WC, Liu XG. Melt index prediction by least squares support vector machines with an adaptive mutation fruit fly optimization algorithm.Chemometrics and Intelligent Laboratory Systems, 2015, 141: 79–87.23 Zheng XL, Wang L, Wang SY. A novel fruit fly optimization algorithm for the semiconductor final testing scheduling problem. Knowledge-Based Systems, 2014, 57: 95–103.24 Wang L, Zheng XL, Wang SY. A novel binary fruit fly optimization algorithm for solving the multidimensional knapsack problem. Knowledge-Based Systems, 2013, 48: 17–23.25 杨琼,俞立峰,陈小小.一种基于果蝇优化方法的连续查询攻击算法.四川大学学报(自然科学版),2014,51(4): 725–730.26 陈世和,张玉文,李东海,老大中.循环流化床锅炉燃烧系统的自抗扰控制器优化设计.控制理论与应用,2013, 30(12):1589–1594.27 郭凡,丁永生,郝矿荣,任立红,肖纯材.基于果蝇算法优化支持向量回归机的纺丝性能预测.系统仿真学报,2014, 26(10):2360–2364.28 刘志雄,王雅芬,张煜.多种群果蝇优化算法求解自动化仓库拣选作业调度问题.武汉理工大学学报,2014,36(3): 71–77.29 窦玉坛,王大兴,刘化清,赵玉华.黄土塬少井区采用果蝇优化算法构建虚拟井方法.地球物理学进展,2014,29(2): 674–680.30 李霞,孙灵芳,杨明.基于改进FOA匹配追踪的超声信号处理研究.仪器仪表学报.2013,34(9),2068–2073.31 周平,白广忱.基于神经网络与果蝇优化算法的涡轮叶片低循环疲劳寿命健壮性设计.航空动力学报,2013,5: 1013–1018.32 史东亚,陆键,陆林军.基于RFID技术和FOA-GRNN理论的高速公路道路关闭交通事件对车辆影响的判断模型.武汉理工大学学报,2012,34(3):63–68.33 王欣,杜康,秦斌,徐海军.基于果蝇优化算法的LSSVR干燥速率建模控制工程.控制工程,2012,19(4),630–633.34 郑伟,孙雪青,郝冬梅,吴颂红.结合Shearlet变换和果蝇优化算法的甲状腺图像融合.激光杂志,2014,35(9):70–73,78.。
基于果蝇算法的PID整定
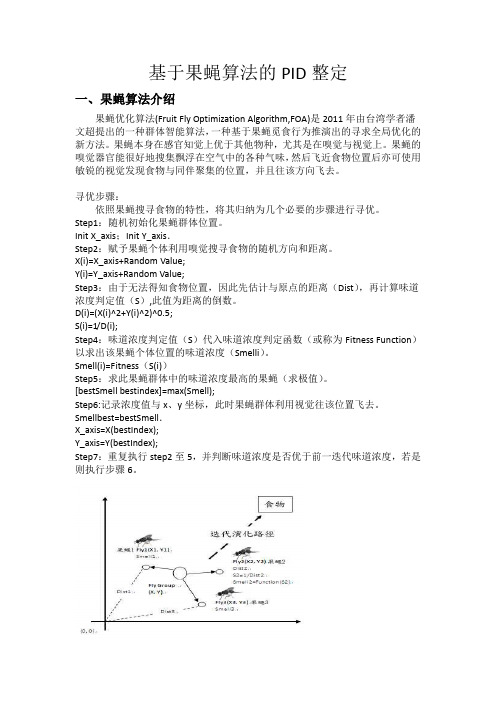
基于果蝇算法的PID整定一、果蝇算法介绍果蝇优化算法(Fruit Fly Optimization Algorithm,FOA)是2011年由台湾学者潘文超提出的一种群体智能算法,一种基于果蝇觅食行为推演出的寻求全局优化的新方法。
果蝇本身在感官知觉上优于其他物种,尤其是在嗅觉与视觉上。
果蝇的嗅觉器官能很好地搜集飘浮在空气中的各种气味,然后飞近食物位置后亦可使用敏锐的视觉发现食物与同伴聚集的位置,并且往该方向飞去。
寻优步骤:依照果蝇搜寻食物的特性,将其归纳为几个必要的步骤进行寻优。
Step1:随机初始化果蝇群体位置。
Init X_axis;Init Y_axis.Step2:赋予果蝇个体利用嗅觉搜寻食物的随机方向和距离。
X(i)=X_axis+Random Value;Y(i)=Y_axis+Random Value;Step3:由于无法得知食物位置,因此先估计与原点的距离(Dist),再计算味道浓度判定值(S),此值为距离的倒数。
D(i)=(X(i)^2+Y(i)^2)^0.5;S(i)=1/D(i);Step4:味道浓度判定值(S)代入味道浓度判定函数(或称为Fitness Function)以求出该果蝇个体位置的味道浓度(Smelli)。
Smell(i)=Fitness(S(i))Step5:求此果蝇群体中的味道浓度最高的果蝇(求极值)。
[bestSmell bestindex]=max(Smell);Step6:记录浓度值与x、y坐标,此时果蝇群体利用视觉往该位置飞去。
Smellbest=bestSmell.X_axis=X(bestIndex);Y_axis=Y(bestIndex);Step7:重复执行step2至5,并判断味道浓度是否优于前一迭代味道浓度,若是则执行步骤6。
算法的流程图:二、两种方法的PID 整定(这一部分为了结论更有说服力,每种方法运行三次,以排除随机性)1、遗传算法遗传算法是一种新型的、模拟生物进化机制的随机化搜索和优化方法,具有并行计算、全局收敛、编码操作等特点。
基于果蝇-蛙跳模糊神经网络PID的永磁直线同步电机控制
基于果蝇-蛙跳模糊神经网络PID的永磁直线同步电机控制乔维德【摘要】针对永磁直线同步电机(PMLSM)伺服系统存在的非线性、时变性及强耦合性,设计一种基于模糊神经网络PID的速度控制策略,通过融合果蝇优化算法和蛙跳算法形成果蝇-蛙跳算法,实时调整优化模糊神经网络的结构参数,输出适用于PID 控制器的最佳参数kp、ki、kd,实现PMLSM速度控制的自适应和智能化.仿真分析与试验结果表明,采用基于果蝇-蛙跳算法优化的模糊神经网络PID速度控制器,能使PMLSM控制系统取得更加优良的控制效果.%According to the nonlinear,time-varying and strong coupling of the servo system of permanent magnet linear synchronous motor (PMLSM),a speed control strategy based on fuzzy neural network PID was designed,through fruit fly optimization algorithm (FOA) and frog leaping algorithm (FLA) made fruit fly optimization algorithm-frog leaping algorithm (FOA-FLA),it real time adjust and optimized the structure parameters of fuzzy neural network,the output were suitable for PID controller of the best parameters kp 、ki 、kd,it had realized adaptive and intelligent control for PMLSM speed control.Simulation analysis and experimental results showed that,Using the PID speed controller of fuzzy neural network based on FOA-FLA,the permanent magnet linear synchronous motor control system could get better control effect.【期刊名称】《电机与控制应用》【年(卷),期】2017(044)011【总页数】7页(P55-60,71)【关键词】永磁直线同步电机;模糊神经网络;果蝇-蛙跳算法;PID控制【作者】乔维德【作者单位】无锡开放大学,江苏无锡 214011【正文语种】中文【中图分类】TM301.2相对于旋转电机而言,由永磁直线同步电机(Permanent Magnet Linear Synchronous Motor,PMLSM)组成的直线伺服系统,因为省略了从旋转电机至工作台之间的所有机械传动环节,能够直接将电能转化为直线运动机械能,并不需要任何中间转换机构,具有结构简单、高速度、高精度、高耐久性、直接驱动等优点,目前已在机器人、高精度数控机床、半导体制造等工业控制领域得到广泛应用。
基于果蝇优化算法的支持向量机参数优化在船舶操纵预报中的应用
基于果蝇优化算法的支持向量机参数优化在船舶操纵预报中的
应用
王雪刚;邹早建
【期刊名称】《上海交通大学学报》
【年(卷),期】2013(47)6
【摘要】应用果蝇优化算法对船舶操纵运动预报的ε-支持向量机(ε-SVM)的参数进行优化,建立船舶操纵运动预报黑箱模型,并用所建立的模型对Z形试验进行预报.通过预报结果与仿真试验结果对比,验证了该优化算法的有效性.研究结果表明,所设计的参数寻优方法具有算法设置简单、调整参数少以及不易陷入局部极小值等优点.【总页数】5页(P884-888)
【关键词】船舶操纵预报;果蝇优化算法;支持向量机;参数优化
【作者】王雪刚;邹早建
【作者单位】上海交通大学船舶海洋与建筑工程学院;上海交通大学海洋工程国家重点实验室
【正文语种】中文
【中图分类】U661.33
【相关文献】
1.基于几种参数优化的支持向量机在径流预报中的比较分析 [J], 崔东文;郭荣;
2.果蝇优化算法与支持向量机在年径流预测中的应用 [J], 崔东文;金波
3.基于支持向量机的四自由度船舶操纵运动盲预报 [J], 王雪刚;邹早建;刘程
4.模糊推理在船舶操纵运动时间序列预报中的应用 [J], 蔡炎东
5.数据挖掘技术在船舶操纵运动预报中的应用研究 [J], 张会喜;周刚伟
因版权原因,仅展示原文概要,查看原文内容请购买。
《基于细菌群觅食优化算法的电液位置系统PID参数寻优研究》范文

《基于细菌群觅食优化算法的电液位置系统PID参数寻优研究》篇一一、引言在工业自动化和机器人技术中,电液位置系统是一个关键部分,其性能直接影响到整个系统的稳定性和工作效率。
PID(比例-积分-微分)控制算法作为电液位置系统中最常用的控制策略,其参数的优化对提高系统性能具有重要意义。
近年来,随着智能优化算法的发展,越来越多的研究者开始尝试将不同的优化算法应用于PID参数的寻优。
其中,细菌群觅食优化算法以其独特的仿生学原理和良好的寻优性能,在PID参数寻优方面展现出了巨大的潜力。
本文旨在研究基于细菌群觅食优化算法的电液位置系统PID参数寻优,以提高系统的控制性能。
二、电液位置系统概述电液位置系统是一种利用液压传动技术实现位置控制的系统。
它主要由伺服电机、液压泵、液压缸、传感器等部分组成。
在电液位置系统中,PID控制算法是最常用的控制策略之一。
PID控制器通过调整比例、积分和微分三个环节的参数,实现对系统位置的精确控制。
然而,由于电液位置系统的复杂性,PID参数的优化一直是一个挑战。
三、细菌群觅食优化算法细菌群觅食优化算法是一种仿生优化算法,其灵感来源于自然界中细菌的觅食行为。
该算法通过模拟细菌在觅食过程中的移动和繁殖行为,实现全局寻优。
在寻优过程中,算法中的“细菌”会在搜索空间中不断移动和更新,以寻找最优解。
由于该算法具有自适应性强、寻优效率高等优点,因此在许多领域得到了广泛应用。
四、基于细菌群觅食优化算法的PID参数寻优将细菌群觅食优化算法应用于电液位置系统的PID参数寻优,可以有效提高系统的控制性能。
首先,根据电液位置系统的特点,建立合适的数学模型。
然后,将PID参数作为优化目标,利用细菌群觅食优化算法进行寻优。
在寻优过程中,通过不断调整比例、积分和微分三个环节的参数,使系统达到最优的控制性能。
五、实验与分析为了验证基于细菌群觅食优化算法的PID参数寻优方法的有效性,我们进行了大量的实验。
实验结果表明,经过优化后的PID参数,电液位置系统的响应速度和稳定性得到了显著提高。
基于果蝇优化算法的PID控制器设计与应用
基于果蝇优化算法的PID控制器设计与应用赵晓军;刘成忠;胡小兵【摘要】The PID parameter obtained from the traditional Z-N method is difficult to receive the optimal control performance. Therefore, a method for parameter optimization of PID controller based on Fruit fly Optimization Algorithm was proposed, which has less control parameters, simple operation and good optimize performance. Then, We the performance of the PID controller designed by this algorithm with that designed by the Z-N method and genetic algorithm were compared. The simulation results show that the PID controller base on Fruit fly Optimization Algorithm is better than the Z-N method and genetic algorithm, and has a faster convergence speed than the genetic algorithm, and the stability control problem of circular inverted pendulum system by using this PID controller achieves good control effect.%针对传统的Z-N法得到的PID参数,难以获得最优的控制性能,提出一种基于果蝇优化算法的PID控制器参数优化的方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2018年10月第46卷第20期机床与液压MACHINETOOL&HYDRAULICSOct 2018Vol 46No 20DOI:10.3969/j issn 1001-3881 2018 20 033收稿日期:2017-05-09基金项目:陕西省重点研发计划资助项目(2018GY⁃042);咸阳市科技局资助项目(2017K02⁃05)作者简介:李明辉(1972 ),男,博士,教授,主要从事智能及高级过程控制的研究㊂E-mail:60334@sust edu cn㊂基于自适应果蝇优化算法的PID参数优化李明辉1,曹泽1,王玉洁2(1 陕西科技大学机电工程学院,陕西西安710021;2 上海亚太计算机信息系统有限公司,上海200040)摘要:针对基本果蝇优化算法(FOA)控制精度不高且易陷入局部最优的缺陷,提出一种自适应果蝇优化算法(IFOA)的PID参数优化方案㊂该算法以控制偏差绝对值和输入平方项的时间积分作为适应度函数,经过迭代寻优得到最优的PID参数值㊂通过二阶时滞系统测试并与基本果蝇优化算法比较,结果表明:该算法控制精度高㊁响应速度快㊁鲁棒性好,为PID参数优化提供了参考㊂关键词:自适应果蝇优化算法(IFOA);适应度函数;PID;参数优化中图分类号:TP273㊀㊀文献标志码:A㊀㊀文章编号:1001-3881(2018)20-144-4OptimizationofPIDParametersBasedonImprovedFruit⁃flyOptimizationAlgorithmLIMinghui1,CAOZe1,WANGYujie2(1 CollegeofMechanicalandElectricalEngineering,ShaanxiUniversityofScience&Technology,Xi anShaanxi710021,China;2 ShanghaiAsia&PacificComputerInformationSystemCo.,Ltd.,Shanghai200040,China)Abstract:Aimingatthedefectsofthebasicfruit⁃flyoptimizationalgorithm(FOA),thecontrolaccuracywasnothighandeasytofallintolocaloptimum,amethodforparameteroptimizationofPIDcontrollerbasedonimprovedfruit⁃flyoptimizationalgorithm(IFOA)wasproposed,inwhichabsoluteerrorandthesquareofcontrolinputwereusedasfitnessfunctionandtheoptimalPIDparametervaluewasobtainedthroughiterativeoptimization.Comparedwiththebasicfruit⁃flyoptimizationalgorithm,thesimulationresultsshowthatthealgorithmhashighcontrolprecision,fastresponseandrobustnessthroughtwoorderdelaysystemtest.ItprovidesareferenceforPIDparameteroptimization.Keywords:Improvedfruit⁃flyoptimizationalgorithm(IFOA);Fitnessfunction;PID;Parameteroptimization0㊀前言PID控制器由于其算法简单㊁鲁棒性好㊁可靠性高,被广泛应用于工业过程控制中[1]㊂传统的PID控制器参数整定采用人工经验,很难得到理想的最优值㊂目前,随着人工智能技术的发展,不少学者针对PID参数整定提出新的算法,如遗传算法㊁粒子群算法等得到了一定的效果[2]㊂这些算法灵活㊁简单㊁易理解,在解决工业过程控制的实际问题中具有非常广阔的应用前景[3]㊂然而,遗传算法编程复杂,参数较多;粒子群算法在进化后期收敛速度减慢,同时陷入局部最优的可能性加大㊂果蝇优化算法(Fruit⁃flyOptimizationAlgorithm,FOA)是2011年台湾学者潘文超提出的一种新的全局优化进化算法[4]㊂该算法由于程序代码简单㊁易于理解㊁参数较少,且全局寻优能力强㊁收敛速度快等优点,在近几年来引起广泛关注[5]㊂JHAN等[6]采用果蝇优化算法进行PID参数整定,得到FOA避免早熟的结论;YLIU等[7-8]采用混沌搜索的FOA算法整定PID参数,减少了适应度波动;宋娟[9]采用FOA与PSO相结合的混合寻优来优化PID整定参数,使得控制器有较好的控制效果和收敛特性㊂作者针对基本果蝇优化算法(FOA)寻优精度不高㊁容易陷入局部最优的缺陷,提出一种自适应果蝇优化算法[10]的PID参数优化方案㊂通过在果蝇搜索过程中引入半径调节系数以及选择合适的适应度函数,对PID的3个参数进行了优化㊂结果表明该算法能够快速高效地寻找到最优参数,有效提高了PID控制器的控制精度㊂1㊀PID控制器基本原理PID控制器是通过对偏差信号进行比例㊁积分㊁微分3个参数的控制,使得系统表现较好性能㊂PID控制原理如图1所示㊂图1㊀PID控制系统框图PID控制器是一种线性控制器,它根据给定值rin(t)与实际输出值yout(t)构成控制偏差为:㊀㊀㊀㊀e(t)=rin(t)-yout(t)(1)PID控制传递函数形式可表示为:u(t)=Kpe(t)+1Tiʏt0e(t)dt+Tdde(t)dtéëêêùûúú(2)其中:Kp为比例系数;Ki=Kp/Ti为积分增益;Kd=KpTd为微分增益㊂比例环节Kp反映系统的偏差信号,Kp越大,系统反应越快,调节精度也会越高,但易产生超调㊂Ki主要是用来消除静差,提高系统的无差度,Ti增大,积分作用减弱㊂微分环节反映信号的变化率速率,Td越大,能够有效减小超调,但会使系统的调节时间延长[11]㊂所以,要合理调节PID的3个参数才能达到理想效果㊂2 果蝇优化算法及其改进2 1㊀基本果蝇优化算法果蝇优化算法(FOA)是从果蝇的觅食行为过程启发而来㊂果蝇的主要食物搜索机制是以嗅觉为基础的,它们能够非常有效地在很远的地方找到食物源㊂然后,飞到食物位置附近后再使用敏锐的视觉发现食物与同伴的位置,并且往该方向飞去[12]㊂果蝇和食物之间的距离与食物的味道浓度是相关的,即距离越近,其味道浓度越大[13]㊂果蝇群体迭代搜寻食物示意图如图2所示㊂图2㊀果蝇群体迭代搜寻食物示意图果蝇优化算法具体实现步骤如下:(1)初始化果蝇种群㊂设定果蝇种群数量和迭代次数,随机给定果蝇个体初始位置(x,y)㊂(2)给出果蝇(x,y)的随机方向和距离(xi,yi)㊂xi=x+ayi=y+a(3)式中:a为随机值㊂(3)由于不能确定食物位置,所以需要先计算果蝇个体到原点距离Di,然后得出味道浓度判定值Si㊂Di=x2i+y2iSi=1/Di(4)(4)将判定值Si代入需要的适应度函数F(Si)中,从而得出果蝇个体位置的味道浓度Smelli㊂Smelli=F(Si)(5)(5)从果蝇群体中找到味道浓度最优的浓度和个体㊂bestSmellbestIndex[]=min(Smelli)(6)(6)将最优味道浓度值和(x,y)坐标记录并保留下来,这时果蝇利用视觉飞向该位置去㊂Smellbest=bestSmellx=x(bestIndex)y=y(bestIndex)(7)(7)进入迭代寻优,将步骤(2) (5)循环进行,判断当前最佳浓度是否优于前一次最佳浓度,并且当前迭代次数是否小于最大迭代次数,若是则记录下来㊂2 2㊀自适应果蝇优化算法2 2 1㊀搜索步长的改进果蝇优化算法在寻优第(2)步中搜寻范围一直是[-1,1]之间,即半径为1的区域㊂这样的弊端是在搜索前期可能会因选择步长较小而使搜索效率下降,在搜索后期又因步长较大而错过最优解㊂为此在搜寻过程当中引入半径调节系数λ㊂自适应果蝇优化算法IFOA调整搜寻范围的策略是果蝇个体采用嗅觉搜寻食物,其随机方向和距离为:xi=x+ωˑ(2rand()-1)(8)其中:ω=ωˑλi,初始值设定为ω=1,i为当前迭代次数㊂在搜索初期,可以先进行全局搜索,在搜索后期随着迭代次数的增加,搜索范围逐步减小,进行局部搜索㊂这样可以根据果蝇搜索初期和后期的不同阶段,使搜索范围随迭代次数自适应调整㊂2 2 2㊀搜索方向的改进基本果蝇优化算法在第(3)步计算果蝇味道浓度判定值Si时始终为正值,从而得出的适应度函数不精确㊂为了便于处理,直接将气味浓度判定值Si=xi,从而计算出最小的气味浓度适应度值㊂自适应果蝇优化算法(ImprovedFruit⁃flyOptimizationAlgo⁃rithm,IFOA)具体流程如图3所示㊂图3㊀自适应果蝇优化算法流程图㊃541㊃第20期李明辉等:基于自适应果蝇优化算法的PID参数优化㊀㊀㊀3㊀自适应果蝇优化算法的PID控制器设计3 1㊀适应度函数的选取IFOA算法在搜索过程中不仅用气味浓度适应度函数来评价果蝇个体或解的优劣,而且作为以后寻优个体位置更新的依据㊂气味浓度适应度函数是自适应果蝇优化算法与控制系统结合的纽带,使算法不断向控制目标寻找到最优解㊂为了防止初始误差较大影响获取理想的动态特性,采用误差绝对值的时间积分性能指标作为最小目标函数[14]㊂为进一步避免控制量太大,加入控制的输入平方项在内,使得目标函数由误差量和输出量同时控制㊂则目标函数为:J=ʏɖ0[ω1e(t)+ω2u2(t)]dt(9)其中:e(t)为输入量rin(t)和PID控制输出yout(t)之间的误差值;u(t)为控制器输出;ω1和ω2为权值常数,在[0,1]之间㊂为了避免超调,采用一定的惩罚控制,将超调量作为最优指标的一项,此时最优指标为:当e(t)<0时:J=ʏɖ0(ω1e(t)+ω2u2(t)+ω3e(t))dt(10)其中:ω3为权值,且ω3≫ω1,一般情况下,ω1=0 999,ω2=0 001,ω3=100㊂3 2㊀PID控制器的IFOA算法设计基于IFOA算法的PID参数整定原理如图4所示㊂图4㊀基于IFOA的PID参数整定原理图用于PID参数整定的IFOA算法步骤如下:(1)设置果蝇种群大小nsize及最大迭代次数nmax,并初始化果蝇个体的位置X,其中,每个果蝇的位置由比例㊁积分㊁微分3个控制参数组成:X=KpKiKd[](11)由于果蝇种群的多样性,可以根据实际工程背景设定Kp㊁Ki㊁Kd的取值范围,初始位置在相应范围内随机产生㊂(2)给出果蝇个体使用嗅觉来寻找食物的随机方向及距离,见式(8),其中ω为搜寻半径,初始值设定为ω=1;rand()是[0,1]区间内的随机数,且服从均匀分布㊂(3)设置半径调节系数λ,令ω=ωˑλi,i为当前迭代次数,保证迭代次数越大,搜索范围越小㊂(4)令气味浓度判定值Si=Xi,根据公式(8)(10)计算出气味浓度的适应度值:Smelli=F(Si)(12)(5)执行基本果蝇优化算法步骤(5) (7)㊂通过执行程序,输出最优个体气味浓度适应度值Smellbest以及PID最优参数Xbest(Kp,Ki,Kd)㊂4㊀仿真实验与结果分析4 1㊀控制对象及仿真条件设置在工业控制过程中,许多系统常被近似为一阶或二阶的典型系统,文中选用二阶延迟系统作为控制对象,分别用FOA㊁IFOA对该系统PID控制器参数进行整定㊂二阶延迟系统为:G1(s)=800s2+1 5s+1.6e-10s(13)对该系统进行仿真,设果蝇种群大小为30,最大迭代次数为100代;Kp搜索范围为[0,100],Ki搜索范围为[0,20],Kd搜索范围为[0,20],输入信号为单位阶跃信号,采样时间间隔为0 001s,半径调节系数λ=0 97㊂4 2㊀仿真结果及分析对该系统采用FOA㊁IFOA两种算法进行仿真,IFOA算法优化个体气味浓度适应度函数曲线如图5所示,图6为系统阶跃响应输出曲线图,两种算法得到的PID优化参数如表1所示㊂图5㊀个体气味浓度适应度函数曲线㊀图6㊀系统阶跃响应表1㊀两种算法PID优化参数参数IFOAFOAKp36.229819.6721Ki0.31820.2509Kd0.87660.8745上升时间/s0.0310.098调节时间/s0.0420.113超调量/%00.01迭代次数/次451适应值14.783116.7253㊀㊀从图5的个体气味浓度适应度函数变化曲线可以看出:IFOA算法比FOA算法的精度要高,收敛速度更快,更容易得到全局最优解㊂从图6的系统阶跃响应曲线以及表1可以判断:改进后的IFOA算法PID㊃641㊃机床与液压第46卷优化参数上升时间较基本FOA算法快0 067s,能快速找到更小的适应值,并且没有超调量㊂因此IFOA算法PID参数优化的方法相比基本FOA算法控制精度高㊁收敛速度快,说明IFOA算法的有效性和优越性㊂5㊀结语PID参数优化在工业控制中具有重要意义,为了进一步提高算法的收敛速度及寻优精度,提出了基于IFOA算法的PID参数整定方案㊂通过二阶时滞系统仿真,验证了该算法的有效性和优越性㊂与FOA算法相互比较可知,IFOA算法具有更快的收敛速度和较高的收敛精度㊂因此,基于IFOA算法的PID参数优化对工业控制具有一定的参考价值㊂参考文献:[1]何佳佳,侯再恩.PID参数优化算法[J].化工自动化及仪表,2010,37(11):1-4.HEJJ,HOUZE.AlgorithmsforParametesOptimizationofPIDController[J].ControlandInstrumentsinChemicalIndustry,2010,37(11):1-4.[2]蔺小林,邓雄峰.基于改进的DE算法对PID参数的优化[J].陕西科技大学学报(自然科学版),2014,32(1):161-164.LINXL,DENGXF.BasedonImprovedDifferentialEvolu⁃tionAlgorithmforPIDParametersOptimization[J].JournalofShaanxiUniversityofScienceandTechnology(NaturalScienceEdition),2014,32(1):161-164.[3]贺圣彦,曹中清,余胜威.基于花授粉算法的PID参数优化[J].计算机工程与应用,2016,52(17):59-62.HESY,CAOZQ,YUSW.OptimizationofPIDParame⁃tersBasedonFlowerPollinationAlgorithm[J].ComputerEngineeringandApplications,2016,52(17):59-62.[4]潘文超.果蝇最佳化演算法[M].台北:沧海书社,2011.[5]朱志同,郭星,李炜.新型果蝇优化算法的研究[J].计算机工程与应用,2017,53(6):40-45.ZHUZT,GUOX,LIW.ResearchonNewFruitflyOptimi⁃zationAlgorithm[J].ComputerEngineeringandApplica⁃tions,2017,53(6):40-45.[6]HANJ,WANGP,YANGX.TuningofPIDControllerBasedonFruitFlyOptimizationAlgorithm[C]//Proceed⁃ingsofInternationalConferenceonMechatronicsandAu⁃tomation,2012:409-413.[7]LIUY,WANGX,LIY.AModifiedFruit⁃flyOptimizationAlgorithmAidedPIDControllerDesigning[C]//Proceed⁃ingsofIntelligentControlandAutomation,2012:233-238.[8]ISCANH,GUNDUZM.ASurveyonFruitFlyOptimizationAlgorithm[C]//ProceedingsofInternationalConferenceonSignal⁃imageTechnology&Internet⁃basedSystems,2016:520-527.[9]宋娟.一种用于PID控制参数优化的混合果蝇算法[J].传感器与微系统,2015,34(6):137-140.SONGJ.AHybridFlyFruitAlgorithmforPIDControlParametersOptimization[J].TransducerandMicrosystemTechnologies,2015,34(6):137-140.[10]范千.基于改进果蝇算法的非线性模型参数估计方法[J].大地测量与地球动力学,2016,36(12):1092-1095.FANQ.ParameterEstimationMethodforNonlinearModelBasedonImprovedFruitFlyOptimizationAlgorithem[J].JournalofGeodesyandGeodynamics,2016,36(12):1092-1095.[11]张连强,王东风.基于改进人群搜索算法的PID参数优化[J].计算机工程与设计,2016,37(12):3389-3393.ZHANGLQ,WANGDF.OptimizationPIDParametersBasedonImprovedSeekerOptimization[J].ComputerEngineeringandDesign,2016,37(12):3389-3393.[12]潘文超.应用果蝇优化算法优化广义回归神经网络进行企业经营绩效评估[J].太原理工大学学报(社会科学版),2011,29(4):1-5.PANWC.UsingFruitFlyOptimizationAlgorithmOpti⁃mizedGeneralRegressionNeuralNetworktoConstructtheOperatingPerformanceofEnterprisesModel[J].JournalofTaiyuanUniversityofTechnology(SocialSciencesEdi⁃tion),2011,29(4):1-5.[13]郭晓东,王丽芳,张学良,等.基于自适应步长的果蝇优化算法[J].中北大学学报(自然科学版),2016,37(6):570-575.GUOXD,WANGLF,ZHANGXL,etal.FruitFlyOptimi⁃zationAlgorithmBasedonAdaptiveStepSize[J].JournalofNorthUniversityofChina(NaturalScienceEdition),2016,37(6):570-575.[14]余胜威,曹中清.基于人群搜索算法的PID控制器参数优化[J].计算机仿真,2014,31(9):347-350.YUSW,CAOZQ.OptimizationParametersofPIDCon⁃trollerParametersBasedonSeekerOptimizationAlgorithm[J].ComputerSimulation,2014,31(9):347-350.[15]陈彬彬,曹中清,余胜威.基于风驱动优化算法WDO的PID参数优化[J].计算机工程与应用,2016,52(14):250-253.CHENBB,CAOZQ,YUSW.PIDParametersOptimiza⁃tionBasedonWindDrivenOptimizationAlgorithm[J].ComputerEngineeringandApplications,2016,52(14):250-253.(责任编辑:张艳君)㊃741㊃第20期李明辉等:基于自适应果蝇优化算法的PID参数优化㊀㊀㊀。