基于ARM的嵌入式PLC的设计
基于ARM的嵌入式PLC的设计与开发
基于ARM的嵌入式PLC的设计与开发吴国中;王小军【摘要】Embedded PLC is developed for IPC and MCU, and it retains not only the characteristics of being easy to handle and stability of PLC, but also the function of flexible expansion and cost-effective advantages. This paper analyzes tile different characteristics of PLC and MCU, and designs a hardware circuit of Embedded PLC by using ARM chip. The result shows that the design is reasonable and re- liable, with great feasibility.%嵌入式PLC是面向IPC和单片机系统开发的,它既保留了PLC的简单易用和稳定性,又具有功能扩展灵活以及性价比高的优点。
本文分析了PLC和单片机的不同特点,利用ARM嵌入式芯片设计出了嵌入式PLC的硬件电路,并通过实践证明了该设计方案合理可靠,具有实际可行性。
【期刊名称】《南京工业职业技术学院学报》【年(卷),期】2012(012)004【总页数】3页(P25-27)【关键词】嵌入式PLC;ARM芯片;硬件电路;输入模块;输出模块【作者】吴国中;王小军【作者单位】南京工业职业技术学院能源与电气工程学院,江苏南京210023;南京军区联勤部,江苏南京210016【正文语种】中文【中图分类】TM571.61引言嵌入式PLC正是面向IPC和单片机系统开发的,它保留了PLC(借助梯形图语言)硬件管理和工艺控制分离的优势,结合IPC和单片机提供的更个性化、差异化的设计方法,形成一种新的控制器设计理念。
基于ARM+FPGA的嵌入式安全PLC设计
基于ARM+FPGA的嵌入式安全PLC设计李明时;马跃;尹震宇【摘要】传统的PLC系统由于自身系统结构和处理器性能等问题,在执行工业控制的过程中往往在执行了一定时间后系统就会发生惯性停机,影响工业生产.提出了基于ARM+FPGA高性能双处理器的嵌入式安全PLC结构模型,可以大幅降低系统失效的概率,提高工业控制可靠性.本系统分为硬件结构和软件系统两大部分.硬件部分采用了1oo2D双通道异构冗余安全体系结构,两条通道配备有安全电路,两个处理器之间设计有安全诊断电路,通过交叉检测判断系统运行是否正常.软件部分主要包括编译系统和执行系统,编译系统将编写的PLC程序转换成机器可执行的代码也叫做目标代码,再由执行系统进行目标代码的执行.【期刊名称】《计算机系统应用》【年(卷),期】2017(026)003【总页数】5页(P225-229)【关键词】ARM;FPGA;冗余结构;1oo2D;安全PLC【作者】李明时;马跃;尹震宇【作者单位】中国科学院沈阳计算技术研究所,沈阳110168;国科学院大学,北京100049;中国科学院沈阳计算技术研究所,沈阳110168;中国科学院沈阳计算技术研究所,沈阳110168【正文语种】中文PLC是一种实时性非常强的控制器, 在制造业和过程控制中占据了非常重要的位置. 经过多年的发展, PLC系统已经比较成熟与完善, 是工业生产的核心部分. 随着PLC 应用领域日益扩大, PLC技术及其产品结构都在不断改进, 功能日益强大. 安全PLC 系统已经成为当下工业控制领域最为重要的部分, 是PLC系统今后发展的大方向. 由于当前工业控制领域不断变化更新, 与传统概念相比更加的复杂, 存在的不确定因素更多, 所以对PLC控制要求也越来越高[9]. 随着嵌入式系统的不断发展, 利用系统硬件和软件资源构建嵌入式PLC系统有着广泛的应用前景, 具有良好的兼容性和开放性. 实时的嵌入式系统拥有增强系统运行可靠性、提高系统的开发效率、缩短系统研发周期的显著特点, 因此基于实时的嵌入式系统进行安全PLC的设计已经逐渐成为当前PLC研发的一种主要方式.ARM处理器以及相似的一些性价比较高的微处理器的推出, 使得嵌入式系统得到了快速地发展, 而随着嵌入式技术的增强, 又使得基于嵌入式的PLC系统得到了长足的进步, 嵌入式PLC系统将会成为工业控制领域今后最主要的发展方向.在现有的一些基于ARM+FPGA结构的PLC系统中, ARM处理器负责处理相关PLC指令, 而FPGA处理器负责处理在系统执行过程中的一些逻辑, 两个处理器之间并没有进行交叉检测, 不能有效降低系统失效的概率, 提高系统安全性, 这便凸显出了本系统实际的研究意义与价值.1 安全PLC安全PLC是指系统本身或外接设备在系统运行的过程中出现执行问题或当机时, 仍然可以向处理器做出正确的反馈并且及时切断控制连接的可编程逻辑控制系统. 与普通PLC不同, 安全PLC不仅可以提供普通PLC的基本功能, 同样可以实现更为关键的安全控制功能.本文中安全PLC主要通过以下技术创新点进行PLC系统安全性的提升:① 设计有安全控制功能结构: 使用异构冗余处理结构, 完成安全控制功能.② PLC安全状态自检测: 包括线路检测、CRC校验、错误自检以及双处理器交叉检测等.③ 安全的编程环境: 针对安全PLC逻辑控制功能要求, 设计基于IEC 61131-3编程语言的编译器, 提供PLC辅助编程工具, 以满足安全控制功能时的逻辑控制功能需求.④ PLC硬件的功能安全设计: 采用ARM+FPGA的高性能双处理器 , 两条独立的通道并联接线, 配备有独立的安全电路, 两个处理器之间设计了一条安全诊断电路, 处理器通过诊断电路进行交叉检测, 进而可以判断系统运行的是否正常.安全PLC主要是为安全级别较高的电子机器和工业设备而设计的, 用于对关键设备的控制和对其进行安全地使用. 提高PLC系统的SIL安全等级可以大幅提高系统内部各个部件在自身安全周期中工作的可靠性和稳定性, 这对于工业控制创新和发展具有重要意义.2 安全PLC的整体结构设计本设计研究的是基于ARM+FPGA的双处理器异构冗余结构的嵌入式安全PLC系统, 分为PLC硬件结构和PLC软件系统两大部分. 安全PLC具备独立看门狗复位电路, 对信号的收集、分析处理和输出过程均使用了双核冗余结构的方式. 通过互为相异冗余的双数据处理系统, 实现基于冗余采集处理的安全控制系统, 满足数控系统的安全控制要求.在安全PLC系统中, 两个处理器与I/O之间分别设计有各自的安全通信线路, 将使用CRC校验对安全处理器和安全I/O之间的通信进行诊断. 因此, 不仅要检查接收的数据是否等于发送的数据, 而且要检查数据的变化. 安全PLC功能结构主要包括以下四部分, 详见图1-PLC安全控制功能结构图.① 双通道安全输入. 每一个外部输入都采取双通道输入方式连接到两个处理器.② 双通道处理机制. 安全PLC内部使用了互为冗余的微出理器, 同时对每个安全功能进行控制和监控, 形成并联通道, 并行处理同一个安全过程. 多个监控系统互为冗余, 只有系统检测到该信号正常且允许输出.③ 双通道安全输出. 安全PLC的输出电路内部使用了冗余结构, 对每一个输出节点进行更加准确稳定的控制, 以保证系统输出的安全性.④ 安全诊断电路. ARM处理器和FPGA处理器分别控制两条线路, 两条线路并连接线, 两个处理器之间设计有安全诊断电路, 在PLC系统进行安全控制的过程中, 两个安全处理器之间进行数据交互(如配置信息, 关键常量, 数据大小, 数据处理结果等)以完成交叉检测, 检查两条通道的处理结果是否一致, 从而进一步判断目前系统运行的是否正常[5].图1 PLC安全控制功能结构图3 安全PLC硬件结构设计硬件结构是整个安全PLC系统的可执行前提和安全控制基础, 为开发系统和运行系统提供了平台.3.1 ARM+FPGA处理器的选用ARM和FPGA处理器是本系统硬件结构的核心部分. 从本系统可以实际应用到的领域、开发的成本和开发的难易程度等因素来考虑, 本系统以ARM-iMX28x和Xilinx SPARTAN-3E XC3S500E芯片作为处理器.iMX28x处理器主频454MHz, 支持DDR2和NAND Flash, 并提供多达5路UART、 1路I2S接口、1路I2C、1 路SPI、1路USB Host接口、4路12bit ADC、1路USB OTG接口、1路10/100M以太网接口、1路SDIO、支持电容式液晶屏和电阻式触摸屏、满足信息的采集以及更高水平的工业控制应用.XC3S500E芯片的等效逻辑门数为50万, 等价于10476个LCs, 具有多达158个用户I/O(含65个差分对I/O), 73kB的分布式RAM, 360kB的RAM和20个专用乘法器.3.2异构冗余的双数据处理系统1oo2D冗余结构是具有诊断功能的双通道处理系统, 结构内部具有两重1oo1D系统, 两条线路以并联的方式进行连接, 并拥有各自的控制线路, 提供了1oo2安全功能, 如图2所示.图2 1oo2D冗余结构1oo2D 安全控制系统要求具有在一次错误发生时能降级到 1oo1D 系统的能力, 因此, 两个主控制模块之间要能够通过通信和信号判断对方模块的运行状态.1oo2D冗余安全系统两个通道独立运行, 使用软件进行自测试和自诊断, PLC根据不同的系统状态, 进入故障安全模式或将故障检测出来. 使用软件检测硬件时, 从现场至处理器, 能够在误动作发生之前就可以发现它们. 在系统出现问题后, 系统可以降级到1oo1D的系统继续运行, 确保出现故障时整个系统的完整性. 七种冗余结构的安全性详见表1[2].表1 冗余结构安全性冗余结构一次降级二次降级安全性可用性 1oo1系统停机\低低 1oo2系统停机\高低 2oo21oo1系统停机低高 2oo31oo2系统停机高高1oo1D系统停机\低高 1oo2D1oo1D系统停机高高 2oo4D1oo2D1oo1D高高3.3独立看门狗复位电路使用独立的看门狗复位电路来监控设备是否正常及不正常时重启设备. 对于嵌入式PLC系统, 设备可能出现死机等现象. 但是, 这些设备不可能随时有工作人员监控, 因此一旦发生问题, 设备需要自行重启.独立看门狗时钟由看门狗自身硬件提供, 不受PLC主时钟的影响. 在正常工作时, 检测ARM+FPGA产生的喂狗信号是否在一定时间内翻转, 如果喂狗信号产生翻转, 定时器的计数清零, 重新计时. 如果喂狗信号没有产生翻转, 则产生复位信号, 上述过程如此重复循环. 看门狗电路工作原理详见图3.图3 看门狗复位电路4 安全PLC软件系统设计安全PLC软件系统由编译系统和执行系统两大部分组成. 编译系统将编写的PLC源程序编译成与硬件平台相关的机器可执行代码, 执行系统通过执行开发系统中生成的可执行代码, 最后将正确处理后的信号输出到控制设备完成对机械设备的安全控制.4.1 软件系统模块设计安全PLC软件系统如图4所示包含编译系统和执行系统两大部分. 编译系统包含“程序编辑模块”、“程序编译、调试模块”以及“通信接口模块”三个模块[14], 执行系统包含“通信接口模块”、“运行内核模块”、以及“I/O接口模块”三个模块.图4 安全PLC软件系统结构图4.2 CRC校验使用CRC校验对安全CPU和安全I/O之间的通信进行诊断, 利用除法及余数的原理来做错误侦测.在实际进行校验时, 发送设备计算出CRC值并随数据一同发送给接收设备, 接收设备对收到的数据计算CRC值并与收到的CRC值进行比较, 如果两个CRC值不相同则说明通讯过程出现错误, 如果两个CRC值相同则说明通讯正常. 不仅要检查接收的数据是否等于发送的数据, 而且要检查数据变化的情况.在进行CRC检验时, 发送装置与接收装置需要事先设定一个好除数也就是所谓的生成多项式, 一般记作Z(x), 生成多项式的最高位与最低位必须是1. 通常循环冗余校验的值是8位、16 位或32位的整数, 常用的CRC码的生成多项式有:① 8位: CRC8=X8+X5+X4+1② 16位: CRC16=X16+X15+X5+1③ 32位: CRC32=X32+X26+X23+X22+X16+X12+X11+X10+X8+X7+X5+X4+X2+X1+1CRC校验工作过程如图5所示.在进行CRC计算前首先将代表发送数据的多项式A(x)乘以xn, 其中n次幂是生成多项式P(x)的最高次幂. 因为使用的是二进制乘法, 所以A(x)*xn的意思就是将A(x)向左移n位, 用来存放余数P(x), 所以实际发送的数据就变为A(x)* xn+P(x). 在进行CRC计算时, 使用二进制也叫做模2运算法, 即加法不进位, 减法不借位, 这种算法的本质意义就是两个操作数进行逻辑异或运算[13].图5 CRC校验流程5 实验方案5.1 实验设计本实验将从CPU占用率、内存占用率以及系统运行的实时周期这几方面对系统的性能进行验证.① 在LINUX系统下运行PLC系统, 输入top指令查看当前ARM处理器和FPGA 处理器的所在开发板的CPU占用率和内存占用率.所使用开发板内存为512MB, 如图6所示, 当前内存占用为3868B, 内存占用率为0.7%, CPU占用率为14%. 可见本PLC系统对内存的占用非常少, 对CPU的占用也不高, 可以满足绝大多数情况下的使用需要.图6 CPU和内存占用率② 计算PLC系统的实时周期.使用梯形图编辑软件编写长度约为500行的逻辑指令, 使用二进制转换插件将LAD文件转换为二进制文件, 放入系统进行执行. 在PLC主循环执行之前, 首先获取当前的系统时间, 在PLC执行第一次循环之后, 再次获取系统当前时间, 通过前后两个时间可以算出进程的执行周期. 经过计算, 完成此逻辑指令用时约为2ms, 如果将逻辑指令的长度提高到1300行左右, 那么计算可得完成逻辑指令用时约为4ms, 实验流程如图7所示.图7 实时周期实验流程图5.2 实验结论通过实验结果可以看出本系统具有良好的综合性能, 可以正确处理需要执行的逻辑指令, 在稳定性与运行速度方面都显示出了良好的执行结果.6 总结本系统使用ARM+FPGA的双处理器结构, 设计研究了基于1oo2D异构冗余模型的安全PLC系统, 给出了安全PLC系统主要的安全控制功能结构、硬件系统的设计、编译系统的模块设计以及看门狗复位电路、CRC校验等关键技术在本系统中的详细设计.最近几十年来, 一部分工业生产事故的原因是由于计算机控制系统的当机或错误执行所导致的, 引起了人员的伤亡和设备财产的损失. 这些事件也提醒着国家、相关技术人员以及普通百姓, 要强化对生产过程的危险性、建立工业安全流程的意识. 由于目前工业控制领域的先进化和高复杂化, 传统PLC已经不能满足高安全性、高可用性的要求, 本系统提出的对于提高PLC安全性的技术创新对于安全控制系统的发展有着重要的意义.1 季照平.基于单片机ARM嵌入式技术的数控系统的开发研究.轻工科技,2015,(11):47–68.2 林通.基于FPGA的安全ePLC的研究[硕士学位论文].杭州:杭州电子科技大学,2015.3 郑凌.基于CPU_FPGA的异构多核系统设计及并行编程模型研究[硕士学位论文].西安:西安电子科技大学,2014.4 刘志颖,郑松.异构三重冗余控制系统的设计与可靠性评估.电气技术,2014,(4):54–59.5 宋岩.基于1oo2D体系结构的高可用安全仪表.信息与控制,2013,42(4):521–528.6 刘建康.基于ARM_FPGA的嵌入式数控系统硬件设计[硕士学位论文].哈尔滨:哈尔滨工业大学,2013.7 任慰.以实时操作系统为中心的嵌入式系统平台化设计研究[博士学位论文].武汉:华中科技大学,2013.8 栾朋.基于嵌入式ARM的PLC设计与实现[硕士学位论文].沈阳:沈阳理工大学,2013.9 王麟琨,方晓时,王春喜.功能安全PLC标准化进展及技术概述.中国仪器仪表,2012,(8):40–45.10 张兰洋.浅析安全 PLC 的性能和结构.科技向导,2012,(6): 153.11 韩雪涛,韩广兴,吴瑛.PLC梯形图及语句表.北京:人民邮电出版社,2012.12 黄金柱.异构双处理器系统功能安全设计方法研究[硕士学位论文].武汉:华中科技大学,2012.13 王志学,麦晓冬,符睿.循环冗余校验原理分析及硬件实现.科技信息,2011,(7):44–81.14 黄晓斌.基于嵌入式Linux的软PLC系统设计与实现[硕士学位论文].长沙:中南大学,2008.15 华镕.常规PLC和安全PLC的区别.仪器仪表标准化与计量,2007,(4):6–9.16 John KH, Tiegelkamp M. IEC 61131-3: Programming Industrial Automation Systems. Berlin: Springer-Verlag, 2010.Design of Embedded Security PLC Based on ARM+FPGALI Ming-Shi1,2, MA Yue1, YIN Zhen-Yu11(Shenyang Institute of Computer Technology, Chinese Academy of Sciences, Shenyang 110168, China)2(University of Chinese Academy of Sciences, Beijing 100049, China)Abstract:The traditional PLC system, due to the problems of its system structure and processor performance, in the process of the implementation in industrial control, often occurs the inertial downtime after a certain execution time, which influences the industrial production. The paper proposes the embedded security PLC structure model, which is based on ARM + FPGA dual processor with high performance, which can greatly reduce the probability of system failure, and improve the reliability of industrial control. This system is divided into hardware structure and software system of two parts. The hardware part adopts the double channel, which is equipped with a safety circuit, heterogeneous redundancy security architecture based on 1oo2d, and safety diagnosis circuit is designed between the two processors, determines whether a system running normally by cross detection. The software part mainly includes the build system and executive system, the build system writes PLC program into executable machine code which is called the target code, and then the execution system executes the target code.Key words: ARM; FPGA; redundant structure; 1oo2D; security PLC① 基金项目:国家科技重大专项(2014ZX04009031)收稿时间:2016-07-01;收到修改稿时间:2016-08-08[doi:10.15888/ki.csa.005661]安全PLC是指系统本身或外接设备在系统运行的过程中出现执行问题或当机时, 仍然可以向处理器做出正确的反馈并且及时切断控制连接的可编程逻辑控制系统. 与普通PLC不同, 安全PLC不仅可以提供普通PLC的基本功能, 同样可以实现更为关键的安全控制功能.本文中安全PLC主要通过以下技术创新点进行PLC系统安全性的提升:① 设计有安全控制功能结构: 使用异构冗余处理结构, 完成安全控制功能.② PLC安全状态自检测: 包括线路检测、CRC校验、错误自检以及双处理器交叉检测等.③ 安全的编程环境: 针对安全PLC逻辑控制功能要求, 设计基于IEC 61131-3编程语言的编译器, 提供PLC辅助编程工具, 以满足安全控制功能时的逻辑控制功能需求.④ PLC硬件的功能安全设计: 采用ARM+FPGA的高性能双处理器 , 两条独立的通道并联接线, 配备有独立的安全电路, 两个处理器之间设计了一条安全诊断电路, 处理器通过诊断电路进行交叉检测, 进而可以判断系统运行的是否正常.安全PLC主要是为安全级别较高的电子机器和工业设备而设计的, 用于对关键设备的控制和对其进行安全地使用. 提高PLC系统的SIL安全等级可以大幅提高系统内部各个部件在自身安全周期中工作的可靠性和稳定性, 这对于工业控制创新和发展具有重要意义.本设计研究的是基于ARM+FPGA的双处理器异构冗余结构的嵌入式安全PLC系统, 分为PLC硬件结构和PLC软件系统两大部分. 安全PLC具备独立看门狗复位电路, 对信号的收集、分析处理和输出过程均使用了双核冗余结构的方式. 通过互为相异冗余的双数据处理系统, 实现基于冗余采集处理的安全控制系统, 满足数控系统的安全控制要求.在安全PLC系统中, 两个处理器与I/O之间分别设计有各自的安全通信线路, 将使用CRC校验对安全处理器和安全I/O之间的通信进行诊断. 因此, 不仅要检查接收的数据是否等于发送的数据, 而且要检查数据的变化. 安全PLC功能结构主要包括以下四部分, 详见图1-PLC安全控制功能结构图.① 双通道安全输入. 每一个外部输入都采取双通道输入方式连接到两个处理器.② 双通道处理机制. 安全PLC内部使用了互为冗余的微出理器, 同时对每个安全功能进行控制和监控, 形成并联通道, 并行处理同一个安全过程. 多个监控系统互为冗余, 只有系统检测到该信号正常且允许输出.③ 双通道安全输出. 安全PLC的输出电路内部使用了冗余结构, 对每一个输出节点进行更加准确稳定的控制, 以保证系统输出的安全性.④ 安全诊断电路. ARM处理器和FPGA处理器分别控制两条线路, 两条线路并连接线, 两个处理器之间设计有安全诊断电路, 在PLC系统进行安全控制的过程中, 两个安全处理器之间进行数据交互(如配置信息, 关键常量, 数据大小, 数据处理结果等)以完成交叉检测, 检查两条通道的处理结果是否一致, 从而进一步判断目前系统运行的是否正常[5].硬件结构是整个安全PLC系统的可执行前提和安全控制基础, 为开发系统和运行系统提供了平台.3.1 ARM+FPGA处理器的选用ARM和FPGA处理器是本系统硬件结构的核心部分. 从本系统可以实际应用到的领域、开发的成本和开发的难易程度等因素来考虑, 本系统以ARM-iMX28x和Xilinx SPARTAN-3E XC3S500E芯片作为处理器.iMX28x处理器主频454MHz, 支持DDR2和NAND Flash, 并提供多达5路UART、 1路I2S接口、1路I2C、1 路SPI、1路USB Host接口、4路12bit ADC、1路USB OTG接口、1路10/100M以太网接口、1路SDIO、支持电容式液晶屏和电阻式触摸屏、满足信息的采集以及更高水平的工业控制应用.XC3S500E芯片的等效逻辑门数为50万, 等价于10476个LCs, 具有多达158个用户I/O(含65个差分对I/O), 73kB的分布式RAM, 360kB的RAM和20个专用乘法器.3.2异构冗余的双数据处理系统1oo2D冗余结构是具有诊断功能的双通道处理系统, 结构内部具有两重1oo1D系统, 两条线路以并联的方式进行连接, 并拥有各自的控制线路, 提供了1oo2安全功能, 如图2所示.1oo2D 安全控制系统要求具有在一次错误发生时能降级到 1oo1D 系统的能力, 因此, 两个主控制模块之间要能够通过通信和信号判断对方模块的运行状态.1oo2D冗余安全系统两个通道独立运行, 使用软件进行自测试和自诊断, PLC根据不同的系统状态, 进入故障安全模式或将故障检测出来. 使用软件检测硬件时, 从现场至处理器, 能够在误动作发生之前就可以发现它们. 在系统出现问题后, 系统可以降级到1oo1D的系统继续运行, 确保出现故障时整个系统的完整性. 七种冗余结构的安全性详见表1[2].3.3独立看门狗复位电路使用独立的看门狗复位电路来监控设备是否正常及不正常时重启设备. 对于嵌入式PLC系统, 设备可能出现死机等现象. 但是, 这些设备不可能随时有工作人员监控, 因此一旦发生问题, 设备需要自行重启.独立看门狗时钟由看门狗自身硬件提供, 不受PLC主时钟的影响. 在正常工作时, 检测ARM+FPGA产生的喂狗信号是否在一定时间内翻转, 如果喂狗信号产生翻转, 定时器的计数清零, 重新计时. 如果喂狗信号没有产生翻转, 则产生复位信号, 上述过程如此重复循环. 看门狗电路工作原理详见图3.安全PLC软件系统由编译系统和执行系统两大部分组成. 编译系统将编写的PLC源程序编译成与硬件平台相关的机器可执行代码, 执行系统通过执行开发系统中生成的可执行代码, 最后将正确处理后的信号输出到控制设备完成对机械设备的安全控制.4.1 软件系统模块设计安全PLC软件系统如图4所示包含编译系统和执行系统两大部分. 编译系统包含“程序编辑模块”、“程序编译、调试模块”以及“通信接口模块”三个模块[14], 执行系统包含“通信接口模块”、“运行内核模块”、以及“I/O接口模块”三个模块.4.2 CRC校验使用CRC校验对安全CPU和安全I/O之间的通信进行诊断, 利用除法及余数的原理来做错误侦测.在实际进行校验时, 发送设备计算出CRC值并随数据一同发送给接收设备, 接收设备对收到的数据计算CRC值并与收到的CRC值进行比较, 如果两个CRC值不相同则说明通讯过程出现错误, 如果两个CRC值相同则说明通讯正常. 不仅要检查接收的数据是否等于发送的数据, 而且要检查数据变化的情况.在进行CRC检验时, 发送装置与接收装置需要事先设定一个好除数也就是所谓的生成多项式, 一般记作Z(x), 生成多项式的最高位与最低位必须是1. 通常循环冗余校验的值是8位、16 位或32位的整数, 常用的CRC码的生成多项式有:① 8位: CRC8=X8+X5+X4+1② 16位: CRC16=X16+X15+X5+1③ 32位: CRC32=X32+X26+X23+X22+X16+X12+X11+X10+X8+X7+X5+X4+X2+X1+1CRC校验工作过程如图5所示.在进行CRC计算前首先将代表发送数据的多项式A(x)乘以xn, 其中n次幂是生成多项式P(x)的最高次幂. 因为使用的是二进制乘法, 所以A(x)*xn的意思就是将A(x)向左移n位, 用来存放余数P(x), 所以实际发送的数据就变为A(x)* xn+P(x). 在进行CRC计算时, 使用二进制也叫做模2运算法, 即加法不进位, 减法不借位, 这种算法的本质意义就是两个操作数进行逻辑异或运算[13].5 实验方案5.1 实验设计本实验将从CPU占用率、内存占用率以及系统运行的实时周期这几方面对系统的性能进行验证.① 在LINUX系统下运行PLC系统, 输入top指令查看当前ARM处理器和FPGA 处理器的所在开发板的CPU占用率和内存占用率.所使用开发板内存为512MB, 如图6所示, 当前内存占用为3868B, 内存占用率为0.7%, CPU占用率为14%. 可见本PLC系统对内存的占用非常少, 对CPU的占用也不高, 可以满足绝大多数情况下的使用需要.图6 CPU和内存占用率② 计算PLC系统的实时周期.使用梯形图编辑软件编写长度约为500行的逻辑指令, 使用二进制转换插件将LAD文件转换为二进制文件, 放入系统进行执行. 在PLC主循环执行之前, 首先获取当前的系统时间, 在PLC执行第一次循环之后, 再次获取系统当前时间, 通过前后两个时间可以算出进程的执行周期. 经过计算, 完成此逻辑指令用时约为2ms, 如果将逻辑指令的长度提高到1300行左右, 那么计算可得完成逻辑指令用时约为4ms, 实验流程如图7所示.。
基于ARM9的嵌入式PLC系统的设计与实现

嵌人式 P C是 由嵌入式微控制器硬件开发平 L
台和嵌 入式 Ln x 作 系统构 成 的 ,通 过 开发 硬件 iu 操
图 2 嵌入式 P C硬件结构 图 L
设 备驱 动程序 ,将驱动 程序 加载 到嵌 入式 系统 的 内
设 备 的注册 ;模块 在调 用 r m d命 令 时被 卸载 , m o 此
模块 、/ AD模块 、WM模块 , P 其中 P C的 I L / 0模块主 要用于 P C的开关量的输入与输 出。 L
3 嵌入 式 P C的软件 系统 L
其主频可达 23 H , 0 M z具有速度快 、 功耗小 、 体积小、 可靠性高、控制功能强大等优点 ,外 围扩展了 1M 6 的 F A H 6 M的 S R M和一些通用接口。 L S 、4 DA 通用接 口为 R -5以太网 口、 S 2 2 口、 S 设备接 口、 J4 R 一3 串 UB
应 用 层
厂
系统、 图形用户接 口、 任务管理等。驱动层和软件层
应用 程 序
文件系统 软件层
图形用户接 口
( UI G )
任务管理 嵌入式
Ln x iu 操
嵌入 式Ln x i u
驱 动层
S R M、F A H、I 模块、A 、 D A L s / 0 DC P wM 、通用 接 口等 片 内外 设驱 动
驱 动层 、 软件层 、 应用 层构 成 。硬件层 为 系统 的最底 层。 驱动层 是软件 层 与硬件层 之 间的桥梁 。 件层在 软 驱 动层 的基 础上 开发 。 括嵌 入 式 Lnx内核 、 包 iu 文件 构成嵌 入式 Lnx操作 系统 。应用 层 根据 P C的控 iu L 制要求 。 现 P C的控 制功 能。 实 L
基于ARM架构的嵌入式智能控制系统设计

基于ARM架构的嵌入式智能控制系统设计随着科技的不断发展,嵌入式智能控制系统在各个领域中得到了广泛应用。
而基于ARM架构的嵌入式智能控制系统由于其高性能、低功耗等优势,成为了市场上最受欢迎的选择之一。
本文将探讨基于ARM架构的嵌入式智能控制系统设计的相关内容。
一、ARM架构简介ARM架构是一种精简指令集计算机(RISC)架构,其设计主要用于低功耗、高效能的嵌入式系统。
ARM架构的特点是指令集精简、指令执行速度快、功耗低、体积小、成本低等。
由于这些特点,ARM架构成为了嵌入式系统设计中的首选。
二、嵌入式智能控制系统的设计要求嵌入式智能控制系统的设计要求通常包括以下几个方面:高性能、低功耗、稳定可靠、易于开发和维护等。
基于ARM架构的嵌入式智能控制系统能够满足这些要求,因此在工业控制、智能家居、智能交通等领域得到了广泛应用。
三、嵌入式智能控制系统设计的关键技术1. 处理器选择:在设计嵌入式智能控制系统时,选择合适的ARM处理器是至关重要的。
不同的应用场景需要不同的处理器性能,因此需要根据实际需求选择适合的ARM处理器。
2. 操作系统选择:嵌入式智能控制系统通常需要运行一个操作系统来管理硬件资源和提供应用程序的运行环境。
常见的嵌入式操作系统有Linux、Android等,选择合适的操作系统对系统性能和功能的实现有重要影响。
3. 通信技术:嵌入式智能控制系统通常需要与其他设备进行通信,如传感器、执行器等。
常用的通信技术包括UART、SPI、I2C、以太网等,根据实际需求选择合适的通信技术。
4. 电源管理:嵌入式智能控制系统通常需要工作在低功耗状态下,因此需要合理设计电源管理模块,以降低功耗并延长系统的工作时间。
5. 硬件接口设计:嵌入式智能控制系统通常需要与各种外部设备进行接口连接,如传感器、执行器等。
合理设计硬件接口,确保系统能够稳定可靠地与外部设备进行通信。
四、嵌入式智能控制系统设计实例以智能家居系统为例,介绍基于ARM架构的嵌入式智能控制系统的设计。
基于ARM嵌入式智能控制器的设计与实现
基于ARM嵌入式智能控制器的设计与实现
0 背景
利用嵌入式技术,给工业系统安装智能控制器,对其进行在线监控和检测,就能及时发现故障并处理,从而不但保证工业系统始终处于良好的运行状态,同时也减轻值机维护人员的负担。
面向工业应用的智能控制系统一般包括如下功能:多路模拟量和开关量的实时采集并显示、通过控制器或上位机进行启停等命令控制、工作状态采集并记录、数据上传、故障记录并报警、历史数据保存、定时开关机等,同时还应具有网络数据传输与控制和软件升级功能。
传统的智能控制器一般多采用8 位单片机实现,但随着实际功能复杂度的增加,尤其是实现大量数据采集和保存、彩色图形交互和网络通信等,单片机已很难满足实时控制的要求。
因此,采用32 位ARM 处理器来实现的方案是较为理想的选择。
1 智能控制器硬件平台
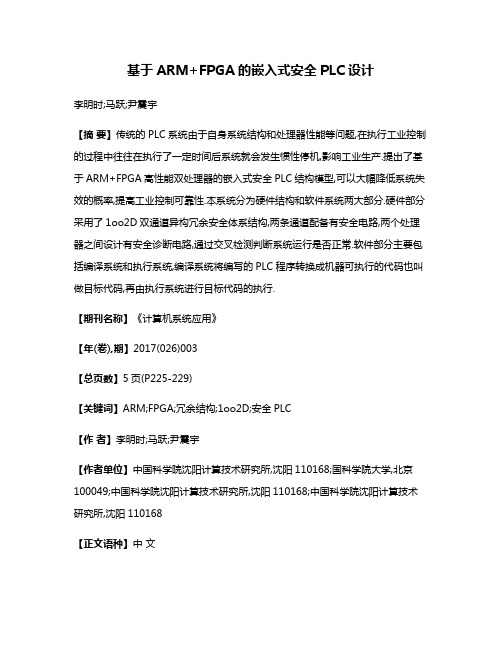
根据功能需求,系统主控芯片采用S3C44B0X。
该处理器是基于
ARM7TDMI 内核SOC
芯片,片内集成LCD 控制器、SDRAM 控制器、RTC、UART 和ADC 等模块,这为硬件系统的设计带来方便同时也提供系统可靠性。
除此之外,硬件上还需扩展存储系统、键盘液晶、CPLD 芯片、串口通信、网卡通信等模块。
存储系统选用较大容量的Nor Flash 来存放代码和工作过程中需记录的数据。
LCD 采用320×240的STN 彩色液晶屏幕,模拟量数
据采集采用内部ADC 和外扩多路选择器,开关量采集与控制采用CPLD 芯片来实现I/O 口的扩展。
系统硬件总体框图如图1 所示:。
基于ARM和I2C总线的嵌入式PLC设计
基于ARM和I2C总线的嵌入式PLC设计
田军;甘永梅;熊伟
【期刊名称】《电气自动化》
【年(卷),期】2010(32)4
【摘要】PLC是一种应用非常广泛的工业自动化控制装置,该文针对传统PLC在现代控制领域不能满足智能化、多任务的要求,提出了一种基于ARM和I2C总线以及带有Linux操作系统的嵌入式PLC控制装置,具体给出了硬件的设计以及操作系统的实现过程.
【总页数】4页(P38-41)
【作者】田军;甘永梅;熊伟
【作者单位】西安交通大学,西安710049;西安交通大学,西安710049;西安交通大学,西安710049
【正文语种】中文
【中图分类】TP368
【相关文献】
1.基于ARM的嵌入式PLC的设计与开发 [J], 吴国中;王小军
2.基于ARM9的嵌入式PLC系统的设计与实现 [J], 林忠;杨惠灵;李素龙
3.基于ARM+FPGA的嵌入式安全PLC设计 [J], 李明时;马跃;尹震宇
4.基于S3C2410ARM的I2C总线驱动架构的设计 [J], 杨德芳
5.基于ARM的嵌入式PLC的设计 [J], 张嵩;术守喜;丁广乾
因版权原因,仅展示原文概要,查看原文内容请购买。
基于ARM的PLC软件系统设计与实现的开题报告
基于ARM的PLC软件系统设计与实现的开题报告一、选题背景和意义随着信息技术和自动化技术的不断发展,PLC已经成为工业自动化控制中不可或缺的组成部分。
在现代工业生产中,PLC系统被广泛应用于各种控制领域,如制造业、机械加工、自动化流水线生产等,在工业自动化领域所占的市场份额逐年增长。
现有的PLC软件系统通常基于特定的操作系统和软件平台,难以实现跨平台的应用,同时缺乏可移植性和可扩展性。
针对这些问题,本项目将采用ARM处理器作为基础平台,开发一款基于ARM的PLC软件系统,具有高效、可靠、可移植和可扩展的特性。
二、研究内容和技术方案本项目将采用ARM Cortex-M系列微控制器作为硬件平台,基于实时操作系统FreeRTOS和嵌入式C语言开发PLC软件系统。
主要研究内容包括软件系统的架构设计、通信模块的开发、控制算法的编写以及用户界面的设计。
具体的技术方案如下:1. 硬件平台的选择和搭建选用ARM Cortex-M系列微控制器作为硬件平台,搭建相应的电路和系统。
根据实际需求和设计要求,选择适当的硬件设备并进行搭建,包括主控芯片、存储设备、输入输出模块等。
2. 软件系统的架构设计根据PLC系统的功能和特性,设计软件的结构和模块。
将系统划分为硬件驱动层、操作系统层、PLC逻辑控制层以及用户接口层等,实现系统的模块化和可扩展性。
3. 通信模块的开发设计和开发通信模块,实现与上位机的通信和数据交互。
采用标准通信协议,使其具有通用性和互操作性。
4. 控制算法的编写根据系统设计要求和控制任务的特性,编写相应的控制算法,实现PLC的逻辑控制和数据处理。
5. 用户界面的设计为了方便用户的操作和使用,设计友好的用户界面,实现系统的监控和控制。
采用图形化界面,并且具有实时性和交互性。
三、预期成果和进度安排本项目的预期成果包括一款基于ARM的PLC软件系统,在实际应用中具有高效、可靠、可移植和可扩展的特性。
具体表现在以下方面:1. 硬件平台稳定、可靠,系统运行流畅;2. 软件系统功能齐全,模块化设计,支持多种工业控制任务;3. 通信模块兼容多种通信协议,与上位机实现稳定可靠的通信;4. 控制算法具有高效性和稳定性,能够满足不同工业控制任务的需求;5. 用户界面友好易用,具有实时性和交互性。
基于ARM的嵌入式PLC的实现

提供二次开发驱动接 口。 41 二 .. 次开发驱动程序 : 过系统 软件提 2. 通 供的外挂任务 ,使用内核开发各种面向具体对 象 性化 、 差异化的驱动程序。 41 .. 3终端应用程序: 面向工 艺流程控制 指 的梯 形 图 语 言 程 序 。 42嵌 入 式 P C芯 片 组 , L E S O E ・0作为 一款加载 了嵌入 A Y C R 10 式 P C系 统 软 件 的 硬 件 平 台 , 以 用 来 设 计 通 L 可
及 应 用f . 京 : 民 邮 电 出版 社 ,0 213 M1 北 人 2 0 :— . f】 世 许 . 编 程 序 控 制 器 原 理 . 用. 络 f . 2徐 可 应 网 M1
合 肥 : 国科 学技 术 大 学 出版社 ,001 5 中 20 :— . [】 洪义 . 编 程 控 制 器 选择 设 计 与 维 护 [ . 3殷 可 M】 北
责任 编 辑 : 青 翠 王
~
1 — 7
语言 , 具 有 C N总 线 的互 连 特性 。 并 A
b4 AD1 . : 2位精度 ,0 P ; 10 K S c2 D :2位精度 ,0 P 。 . A1 10 K S 424通信接 口: .. aC N U : .A B S系统软件管理 , 使用 工具软件 C —E AN S T构建 C N U A B S总线网络。 bUA T :系统 软件管理 ,用 于梯形 图编 . R0 程、 监控 , 支持人机界面及用户驱动程序下载。 1 A T 系统软 件管理 , 2 Rh . U 用于下 载 C N A— BS U 网络参数 、 构建 R 4 5网络及支持第 三方 S8 设备互连 。 结束语 本文针对 目前普通 P C存在的一些不足 , L 把 CO 一1移植到 L C 24中,构建 一个实 /S 1 P 29 时嵌入式 系统 , 完成传统 P C的用途 , L 具有一 定 的扩展性 , 这将是 自动化领域今后发展 的方 向。 参 考 文 献 … 1宫淑 贞, 王冬青 , 徐世许 . 可编程控制 器原理
《基于ARM+FPGA的嵌入式安全PLC设计与实现》
《基于ARM+FPGA的嵌入式安全PLC设计与实现》一、引言随着工业自动化和智能化的快速发展,可编程逻辑控制器(PLC)作为工业控制的核心设备,其安全性和可靠性变得尤为重要。
为了满足现代工业对于高速度、高效率和高度安全性的需求,本文提出了一种基于ARM+FPGA的嵌入式安全PLC设计与实现方案。
该方案利用ARM处理器的强大计算能力和FPGA的高速度、低延迟特性,实现了PLC的高效、安全运行。
二、系统设计1. 硬件设计本系统采用ARM+FPGA的架构,其中ARM处理器负责系统的控制和数据处理,FPGA则负责实现高速的逻辑控制和数据运算。
系统还包含了电源模块、通信接口、存储模块等必要的硬件组件。
其中,通信接口支持多种工业总线协议,以满足不同工业场景的需求。
2. 软件设计软件设计包括操作系统、PLC编程语言解释器、安全防护模块等。
操作系统采用嵌入式实时操作系统,以保证系统的实时性和稳定性。
PLC编程语言解释器用于解释和执行用户编写的PLC 程序。
安全防护模块则负责系统的安全防护,包括病毒查杀、攻击防御等。
三、关键技术实现1. ARM处理器与FPGA的协同工作ARM处理器和FPGA通过总线进行通信,实现数据的快速传输和共享。
ARM处理器负责系统的控制和数据处理,FPGA则负责实现高速的逻辑控制和数据运算。
两者协同工作,实现了PLC 的高效、安全运行。
2. PLC编程语言解释器的实现PLC编程语言解释器采用编译型和解释型相结合的方式,先对用户编写的PLC程序进行编译,生成中间代码,然后再由解释器执行中间代码,实现程序的运行。
解释器的实现需要考虑代码的优化、错误处理等方面。
3. 安全防护模块的实现安全防护模块包括病毒查杀和攻击防御两部分。
病毒查杀采用常见的病毒查杀技术,对系统进行实时监控和查杀。
攻击防御则采用多种安全策略,包括访问控制、数据加密、入侵检测等,以保障系统的安全性。
四、实验与测试为了验证本设计的可行性和性能,我们进行了实验和测试。
《基于ARM+FPGA的嵌入式安全PLC设计与实现》

《基于ARM+FPGA的嵌入式安全PLC设计与实现》一、引言随着工业自动化和智能化的快速发展,可编程逻辑控制器(PLC)作为工业控制的核心设备,其安全性和可靠性显得尤为重要。
传统的PLC设计往往面临计算能力有限、扩展性不足以及安全性不够高等问题。
为了解决这些问题,本文提出了一种基于ARM+FPGA的嵌入式安全PLC设计与实现方案。
该方案结合了ARM的高性能计算能力和FPGA的并行处理能力,实现了高效率、高安全性的PLC控制。
二、系统设计1. 硬件设计本系统采用ARM+FPGA的异构计算架构。
ARM作为主控制器,负责运行操作系统和高级算法;FPGA则用于实现高速并行数据处理和接口控制。
此外,系统还包括电源模块、存储模块、通信接口等。
(1)ARM处理器选择选用高性能的ARM Cortex-A系列处理器,具有高计算能力、低功耗和良好的扩展性。
(2)FPGA选择选用适合工业应用的FPGA芯片,具有高并行处理能力、低延迟和高可靠性。
(3)存储模块设计采用高速、大容量的存储设备,如SSD或DRAM,以满足系统对数据存储和读取的需求。
2. 软件设计软件设计包括操作系统、通信协议、安全机制等。
(1)操作系统采用实时操作系统(RTOS),以保证系统的实时性和稳定性。
(2)通信协议支持多种工业通信协议,如EtherNet/IP、Modbus等,以满足不同工业应用的需求。
(3)安全机制采用加密、认证、访问控制等安全机制,保证系统的数据安全和防止未经授权的访问。
三、关键技术实现1. ARM与FPGA的协同工作通过桥接电路实现ARM与FPGA的协同工作。
ARM负责任务调度和数据处理,FPGA负责高速并行数据处理和接口控制。
两者协同工作,实现高效的数据处理和控制。
2. 数据加密与认证采用高级加密标准(AES)对数据进行加密,保证数据在传输和存储过程中的安全性。
同时,采用数字签名技术对数据进行认证,防止数据被篡改。
3. 访问控制与权限管理通过访问控制和权限管理机制,对系统资源进行保护,防止未经授权的访问和操作。
基于ARM+FPGA的嵌入式安全PLC设计
f a i l u r e , a n d i mp r o v e he t r e l i a b i l i y t o f i n d u s t r i a l c o n r t o 1 . T h i s s y s t e m i s d i v i d e d i n t o h a r d wa r e s t r u c t u r e a n d s o f t wa re
De s i g n o f E mb e d d e d S e c u r i t y P LC B a s e d o n AI  ̄ M+ F P GA
LI Mi n g — S h i l - , M A Yu e , YI N Zh e n . Yu
s y s t e m o f t wo p a r t s .T h e h a r d wa re p a r t a d o p t s he t d o u b l e c h a n n e l ,wh i c h i s e q u i p p e d wi h t a s a f e y c t i r c u i t , h e t e r o g e n e o u s r e d u n d a n c y s e c u r i y t a r c h i t e c t u r e b a s e d o n l o o 2 d , a n d s a f e y t d i a g n o s i s c i r c u i t i s d e s i ne g d b e we t e n he t
( U n i v e r s i t y o f C h i n e s e A c a d e my o f S c i e n c e s , B e i j i n g 1 0 0 0 4 9 , C h i n a )
基于ARM嵌入式系统软PLC的研究的开题报告
基于ARM嵌入式系统软PLC的研究的开题报告一、选题背景与意义随着工业自动化水平的不断提高,PLC(Programmable Logic Controller,可编程逻辑控制器)也越来越广泛地应用于各种工控领域。
在传统的PLC 系统中,通常采用x86架构的工控计算机或者FPGA实现PLC功能。
然而,这种方案在成本、功耗、体积等方面存在诸多不足,不适用于嵌入式场景,特别是对于小型或中小型的工业设备。
基于ARM嵌入式系统的软PLC方案,具有成本低、功耗低、体积小等优点,能很好地满足嵌入式场景下PLC需求,是当前研究热点之一。
本文选题基于此,旨在研究基于ARM嵌入式系统的软PLC系统。
二、研究内容和方法本文的研究内容主要包括:1. ARM架构和嵌入式系统基础知识:介绍ARM架构、ARM嵌入式系统的体系结构,分析ARM嵌入式系统在PLC领域的应用。
2. 软PLC的基本原理:讲解PLC基本原理、软PLC的基本概念和实现方式,并分析ARM嵌入式系统的软PLC实现优势。
3. 开发环境搭建:选择合适的硬件平台和软件开发环境,进行软PLC的开发环境搭建。
4. 软PLC系统实现:基于RT-Thread实时操作系统,使用C语言开发软PLC系统的核心模块,包括模块初始化、程序解析、指令执行等模块,实现软PLC的基本功能。
5. 系统测试和性能评价:对软PLC系统进行功能测试和性能评估,分析软PLC系统的优劣及其应用前景。
本文的研究方法主要采用文献研究、理论分析和实践研究相结合的方法。
首先通过文献研究和理论分析,深入掌握软PLC相关的基础知识和技术原理,然后基于ARM嵌入式系统,搭建软PLC开发环境,开发软PLC系统,并进行测试和性能评价。
三、预期结果与创新点本文预期能够实现基于ARM嵌入式系统的软PLC系统,并具备完整的功能和性能。
针对传统的x86架构PLC存在成本高、功耗大、体积大等问题,本文的ARM嵌入式软PLC方案具有成本低、功耗低、体积小等优点,能够很好地满足嵌入式场景下PLC需求。
一种基于arm芯片的专用plc控制器的制作方法
一种基于arm芯片的专用plc控制器的制作方法随着现代工业的快速发展,PLC控制器已成为自动化控制系统中的关键设备。
而基于ARM芯片的专用PLC控制器因其高效、稳定性好等特点,在工业控制领域中越来越受到广大工程师的喜爱。
下面,我们将介绍一种基于ARM芯片的专用PLC控制器的制作方法,希望对有需要的读者提供一些指导意义。
首先,制作一种基于ARM芯片的专用PLC控制器需要准备以下主要的材料和设备:ARM开发板、继电器、电源模块、扩展模块、传感器、电缆等。
接着,开始制作的第一步是搭建硬件平台。
首先,将ARM开发板与电源模块进行连接,并确保其正常工作。
然后,根据实际需求,将继电器和扩展模块与ARM开发板连接起来,并确保传感器能够正常与之通信。
最后,用电缆将各个设备进行连接,并进行相应的配置和设置。
接下来是软件部分的制作。
首先,选择适合的开发环境,如Keil、IAR等,并进行相应的配置。
然后,根据实际需要,编写相应的控制程序,并将其下载到ARM开发板中。
在编写程序时,需要根据实际控制需求,合理设置各个输入输出口的功能,并设置相应的逻辑规则和控制算法。
完成软件部分的编写后,应进行系统调试和功能测试。
通过连接各个设备,检查其与ARM开发板的通信是否正常,并确保控制程序能够正确地响应输入信号的变化。
同时,也需要测试各个输出口的控制功能是否符合预期。
最后,根据实际需求,对制作的专用PLC控制器进行优化和改进。
通过不断调整和改进控制程序的算法和逻辑规则,提高系统的响应速度和稳定性。
同时,也可以根据实际应用场景,添加一些特殊功能和模块,以满足特定的控制需求。
总结起来,制作一种基于ARM芯片的专用PLC控制器需要花费一定的时间和精力,但其带来的性能和效果将是值得的。
通过以上的制作方法,读者可以了解到基于ARM芯片的专用PLC控制器的制作过程和注意事项,并有一定的指导意义。
希望这篇文章能够对有需要的读者提供帮助。
《基于ARM+FPGA的嵌入式安全PLC设计与实现》

《基于ARM+FPGA的嵌入式安全PLC设计与实现》一、引言随着工业自动化程度的不断提高,可编程逻辑控制器(PLC)作为工业控制的核心设备,其安全性和可靠性显得尤为重要。
传统的PLC设计多采用单一处理器架构,难以满足日益增长的安全性和性能需求。
因此,本文提出了一种基于ARM+FPGA的嵌入式安全PLC设计与实现方案,旨在提高PLC的安全性和性能。
二、系统设计1. 硬件设计本设计采用ARM+FPGA的异构计算架构,其中ARM作为主处理器,负责系统的控制和数据处理;FPGA作为协处理器,负责高速信号处理和实时控制。
在硬件设计上,主要考虑了以下方面:(1)处理器选择:选用高性能的ARM处理器和FPGA芯片,以保证系统的计算能力和数据处理速度。
(2)接口设计:设计丰富的接口,包括通信接口、存储接口、电源接口等,以满足系统与外界的通信和数据存储需求。
(3)功耗控制:优化系统功耗设计,降低系统能耗,提高系统可靠性。
2. 软件设计软件设计主要包括操作系统、通信协议、安全机制等方面的设计。
本设计采用实时操作系统(RTOS)作为系统的软件平台,以支持多任务处理和实时控制。
同时,设计了自定义的通信协议,以保证数据传输的可靠性和实时性。
在安全机制方面,采用了加密、认证、访问控制等安全措施,以提高系统的安全性。
三、关键技术实现1. ARM与FPGA的协同工作ARM与FPGA的协同工作是本设计的关键技术之一。
通过设计合理的任务划分和调度算法,实现ARM与FPGA之间的协同计算和数据处理,以提高系统的整体性能。
2. 安全机制的实现安全机制的实现是保证系统安全性的重要措施。
本设计采用了加密、认证、访问控制等安全措施,对数据进行加密传输和存储,对用户进行身份认证和访问控制,以防止未经授权的访问和数据泄露。
3. 实时性保障实时性是PLC的重要性能指标之一。
本设计通过优化任务调度算法、提高数据处理速度、优化通信协议等措施,保证系统的实时性,以满足工业控制的需求。
基于嵌入式系统的PLC设计

基于嵌入式系统的PLC设计摘要本文基于嵌入式系统的PLC设计以STM32F103C8T6单片机为主控CPU,采用光耦隔离输入,继电器隔离输出,RS-232/RS485通信,实现了7路光耦隔离输入5路继电器隔离输出的嵌入式PLC设计,该嵌入式PLC设计灵活,数据处理速度快,抗干扰能力强,可适用于特定工业控制自动化系统中。
关键词:PLC;STM32F103C8T6;光耦隔离;继电器隔离1引言随着工业自动化控制技术的不断发展,PLC被广泛应用于自动化控制系统中,而基于嵌入式系统的PLC,具有控制精度高,开发周期短,能够满足用户对于特定工业控制中所需功能的灵活设计,这样就可以达到对于特殊工业环境下所需功能模块的定制,更加贴近于用户对于功能的设计要求,并且用户可以根据功能需要选择合适的硬件来组成满足控制需求的嵌入式PLC。
2系统总体设计本文基于嵌入式系统PLC的开发采用高性能STM32F103C8T6单片机为主控CPU,该微控制器内部资源丰富,具有32位总线宽度,运行时钟频率为72MHz,64KB程序存储容量,内部集成了高速A/D(D/A)转换通道。
输入模块采用光耦隔离,可以防止外界的干扰信号进入系统,提高了整个系统的稳定性和抗干扰能力;输出模块采用继电器输出,可以满足工业控制现场对于各种负载的驱动要求;外部通信模块支持RS232和RS485通信,用于程序的下载以及和外部设备通讯;A/D(D/A)模块采用STM32F103C8T6单片机内部自带转换通道,转换速度快、精度高。
整个系统运行稳定,抗干扰能力强,适用于工业控制领域,其系统整体设计结构如图1所示。
图1:系统原理框图3电路设计3.1主控芯片的选取嵌入式PLC对于输入信号的响应速度主要取决于微控制器CPU处理数据的速度,因此,在基于嵌入式系统开发PLC时,CPU的选型极为重要,CPU的响应速度决定了嵌入式PLC的性能。
本设计采用STM32F103C8T6单片机为主控CPU,该微控制器采用ARM架构,内部拥有20K的RAM、64K的FLASH、2个SPI、2个I²C、3个USART、37个通用I/O端口、12位ADC(DAC)转换器、封装为LQFP48,其内部资源丰富,性能稳定,可实现基于嵌入式系统PLC的设计。
基于ARM和CAN总线的嵌入式PLC设计

基于ARM和CAN总线的嵌入式PLC设计0 前言可编程逻辑控制器(PLC),一种数字运算操作的电子系统,专为在工业环境应用而设计。
它采用一类可编程的存储器,用于其内部存储程序,执行逻辑运算、顺序控制、定时、计数与算术操作等面向用户的指令,并通过数字或模拟输入/输出控制各种类型的机械或生产过程,是工业控制的核心部分。
随着工业技术的发展以及规模的不断扩大,传统的PLC 面临着IO 点数增多、通讯功能需要增强等诸多方面的挑战,已无法满足个性化、差异化的需求。
现有的设计主要有工控机、单片机板等。
工控机在互连、表达、算法等方面优势明显,但其实时性、稳定性难以满足连续控制的苛刻要求,通常用于监控。
单片机系统在成本控制上更加灵活,可是没有操作系统使其只能应用于低端场合。
具有嵌入式操作系统的PLC 将能结合两者的优点,成为PLC 领域的主要研究方向。
本文介绍以嵌入式芯片STM32 和CAN 总线相结合的方式进行嵌入式PLC 设计,并采用μC/OS-II实时操作系统,利用其开放性、模块化和可扩展性的系统结构特性来达到高实时要求的PLC 控制,在保证实时性的同时,实现多点位、复杂功能的PLC 系统控制目标。
1 系统总体设计系统总体设计框图如图1 所示。
本设计采用ST 公司生产STM32F103RCT6 作为系统的主处理器。
STM32 系列基于专为要求高性能、低成本、低功耗的嵌入式应用专门设计的ARM Cortex-M3 内核,它集成了两个CAN 控制器,并为每个CAN 控制器分配了256 字节的SRAM,每个CAN 控制器有3 个发送邮箱和两个接收FIFO。
它主要负责采集、处理开关量和模拟量输入,控制开关量输出,同时通过CAN 总线完成与上位机的通信。
基于ARM的嵌入式PLC的设计
中 图分类号:TP202
文 献 标 识 码:B
文章编 号:1001- 9227( 2008) 03- 0009- 03
0 引言 可编程逻辑控制器( P r o g r a mma b l e Lo g i c
Cont r ol l e r ,PLC) 是一种实用性很强的工业控制器,在 自动化领域具有举足轻重的地位。随着科学技术的进 步,PLC在工控领域得到了极大的发展和应用。但如今 工控产品已经发展到一个追求个性化、差异化的阶段, 在科技迅速发展的直接影响下,传统的 PLC面临着个 性化、差异化的压力,而具有嵌入式操作系统的 PLC将 可以满足这方面的要求。
( 下转第 23页)
《自动化与仪器仪表》2008 年第 3 期(总第 137 期)
该模糊控制系统已应用到光纤熔缩机项目中,在 整个控制过程中,熔缩棒进气端和出气端的压力差稳 定在 1. 5~4Pa 之间,满足光纤棒熔缩要求,对压力跟 踪能力强。
参考文献 1 陈理君, 微机模糊控 制[ M] . 武汉:武汉理工大学 出版社,
本设计选用μ C/ OS- Ⅱ系统。μ C/ OS- Ⅱ是一种 基于优先级的可抢先的硬实时内核。具有以下特点:
(1)它是一种专门为嵌入式设备设计的内核,目 前已经被移植到 40 多种不同结构的 CPU上,运行在从 8 位到 64 位的各种系统之上;
(2)μ C/ OS- Ⅱ可以免费获得代码,不用支付任 何费用,可以降低系统的开发成本;
3 μ C/ OS- Ⅱ在LPC2294上的移植 3. 1 μ C/ OS- Ⅱ移植所需条件
所谓移植,就是使一个实时内核能在某个微控制 器或微控制器上运行。将μ C/ OS- Ⅱ移植到不同处理 器平台时,需要解决的主要问题有:
基于ARM的嵌入式工业控制系统设计

基于ARM的嵌入式工业控制系统设计嵌入式工业控制系统是一种基于ARM(Advanced RISC Machines)的嵌入式系统,用于监控和控制工业过程。
ARM是一种精简指令集(RISC)微处理器架构,通常用于低功耗低成本的嵌入式系统。
嵌入式工业控制系统通常用于监控和控制工厂、机械设备、物流系统等工业过程。
它们可以采集传感器数据,执行实时控制算法,并与其他设备进行通信。
这些系统通常需要高可靠性、实时响应和低功耗。
ARM架构在嵌入式系统中非常受欢迎,因为它具有以下优点:1.低功耗:ARM处理器在功耗方面表现出色,这对于嵌入式系统而言非常重要,因为它们通常需要长时间运行,并且需要尽量减少能源消耗。
2.高性能:尽管ARM处理器相对较小,但它们可以提供出色的性能。
ARM的指令集是精简的,可以执行高效的算法,并且具有高速缓存和优化的流水线架构,这使得ARM处理器在嵌入式系统中的性能表现出色。
3.易于集成:ARM处理器具有可扩展性,可以很容易地与其他硬件组件集成。
这对于嵌入式系统设计来说非常重要,因为工业控制系统通常需要与传感器、执行器、通信模块等多个硬件组件进行集成。
4. 开发工具和生态系统:ARM有着丰富的软件开发工具和生态系统支持。
开发人员可以使用许多成熟的开发工具和操作系统,如Keil、IAR 等,来开发ARM嵌入式系统。
在设计嵌入式工业控制系统时,需要考虑以下关键因素:1.系统架构:选择适当的ARM芯片和硬件平台。
根据应用需求选择适当的处理器型号、内存容量、通信接口等。
2. 实时性:工业控制系统通常需要实时响应,因此需要合适的实时操作系统(RTOS)来确保任务的及时执行。
一些流行的RTOS包括uC/OS-II、FreeRTOS等。
3. 通信接口:工业控制系统常需要与其他设备进行通信,例如传感器、执行器、PLC等。
选择适当的通信接口,如UART、SPI、I2C、Ethernet等,并使用相应的通信协议来实现数据交换。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
控制系统中应用[J].河海大学常州分校学报,2006,20(1)
57-59 3 Process Develop System Manual for P8 System, Philips,
ltd.1996 4 诸 静,模糊控制原理与应用[M].北京:机械工业出版社,
10
基于 ARM 的嵌入式 PLC 的设计 张 嵩,等 (3)它是一个源码公开、可移植、可固化、可裁 剪、占先式、支持多任务的实时操作系统。用户可以 根据自己的需要裁剪系统,提高系统的性能,也可增 加自己的模块,使系统具有可扩展性; (4)μ C/OS- Ⅱ内核主要提供进程管理、时间管 理、内存管理等服务。系统可以管理 64 个任务,每个 任务均有一个独有的优先级,并且系统提供了丰富的 API 函数。
0 引 言 可编程逻辑控制器( P r o g r a m m a b l e L o g i c
Controller,PLC)是一种实用性很强的工业控制器,在 自动化领域具有举足轻重的地位。随着科学技术的进 步,PLC在工控领域得到了极大的发展和应用。但如今 工控产品已经发展到一个追求个性化、差异化的阶段, 在科技迅速发展的直接影响下,传统的 PLC 面临着个 性化、差异化的压力,而具有嵌入式操作系统的PLC将 可以满足这方面的要求。
《自动化与仪器仪表》2008 年第 3 期(总第 137 期)
基于 ARM 的嵌入式 PLC 的设计
张 嵩,术守喜 *,丁广乾 (山东省电力学校 泰安,271000) (* 山东科技大学信息与电气工程学院 青岛,266510)
摘 要 :传统 PLC 是一种实时性很强的控制器,在工业控制领域占据了举足轻重的地位。由于目 前控制内容的复杂化和高难度化,传统PLC已经不能满足智能化、人性化的要求,而实时嵌入式操作系统 具有提高系统可靠性、提高开发效率、缩短开发周期的显著优势。本文针对目前对工业控制器个性化、智 慧化的发展需求,面向工业控制领域设计了一种基于 ARM 和μ C/OS- Ⅱ的嵌入式 PLC。
μ C/OS- Ⅱ在 LPC2294 上的移植工作需要处理以 下四个文件:INCLUDES.H 文件,OS_CPU.H 文件, OS_CPU.C 文件,OS_CPU_A.ASM 文件。
INCLUDES.H是一个头文件,所有的.c文件的第一 行都包含# include “includes.h”语句,它增强了 代码的可移植性。
如今,以 ARM 为代表的 32 位高性能微处理器的推 出以及芯片集成度的大幅度提高,促进了嵌入式系统 的高速发展,而嵌入式系统各方面技术的提高,又促 进了嵌入式 PLC 的发展,具有嵌入式操作系统的 PLC 将 是自动化领域今后发展的方向。
1 嵌入式PLC的硬件结构设计 嵌入式系统的开发主要包括硬件结构设计和软件
本设计选用μ C/OS- Ⅱ系统。μ C/OS- Ⅱ是一种 基于优先级的可抢先的硬实时内核。具有以下特点:
(1)它是一种专门为嵌入式设备设计的内核,目 前已经被移植到 40 多种不同结构的 CPU 上,运行在从 8 位到 64 位的各种系统之上;
(2)μ C/OS- Ⅱ可以免费获得代码,不用支付任 何费用,可以降低系统的开发成本;
关 键 词 :P L C ;A R M ;μ C / O S - Ⅱ;嵌入式系统;移植 Abstract: Traditional PLC is one Real-time controller, which plays an important role in the industry control field. As a result of the more complicate and complex control demand, traditional PLC has already could not satisfy the demand of the intelligent and humanity. And embedded Real-Time system has the advantages of enhancing the reliability of system, improving the developmental efficiency and reducing the development cycle. The paper aims at the demands of intelligent and humanity of industry controller, faces to the industry control field design a embedded PLC based on ARM andμC/OS-Ⅱ. Keyword: PLC; ARM; μC/OS-Ⅱ; Embedded system; Transplant 中 图 分 类 号:TP202 文 献 标 识 码:B 文 章 编 号:1001-9227(2008)03-0009-03
编程两个方面。硬件结构是整个嵌入式系统的物理基 础,为软件运行提供了平台。软件编程保证了硬件系 统按要求运行。这两个部分是缺一不可的。具体的设 计应根据不同设计要求,选择微处理器、存储设备和 各种接口[1][2]。 1.1 微控制器的选择
收稿日期:2007-11-28
微控制器是嵌入式系统硬件结构的核心部分。从 系统应用的领域、成本和开发的难易程度等诸多因素 来考虑,本设计选择 ARM 公司提供的内核作为系统的 硬件内核,系统采用LPC2294 微控制器作为主控芯片。 LPC2294 是支持实时仿真和嵌入式跟踪的 16/32 位 ARM7TDMI-S 的 CPU,并带有 256KB 嵌入的高速 Flash 存储器。128位宽度的存储器接口和独特的加速结构使 32 位代码能够在最大时钟速率下运行。对代码规模有 严格控制的应用可使用16位Thumb 模式将代码规模降 低超过 30%,而性能的损失却很小。LPC2294 具有 144 脚封装、极低的功耗、多个 32 位定时器、8 通道 10 位 ADC、4 高级 CAN、PWM 通道以及多达 9 个外部中断管 脚[3],这些优点使其非常适合应用于工业实时控制领 域,成为工业控制器的嵌入式微控制器的最佳选择之 一。 1.2 系统的整体结构
/*** 与μ C/OS- Ⅱ有关 ***/ #include "os_cpu.h" #include "os_cfg.h" #include "ucos_ii.h" OS_CPU.H文件里主要包括对与编译器相关的数据 类型、处理器相关数据类型和堆栈类型的定义,对中 断的处理方式的定义即几个宏的定义,以及对堆栈增 长方式的声明。 OS_CPU.C 文件的修改是移植的核心部分,μ C/ OS- Ⅱ的移植要求用户编写 10 个简单的 C 函数: OSTaskStkInit() OSTaskCreateHook() OSTaskDelHook() OSTaskSwHook() OSTaskIdleHook() OSTaskStatHook() OSTimeTickHook() OSInitHookBegin() OSInitHookEnd() OSTCBInitHook() 唯一必要的函数是OSTaskStkInit(),其它9个函 数必须得声明但没必要包含代码。
2001 5 方一鸣.基于MATLAB的模糊控制系统仿真[J].自动化与仪器
仪表,2000,10(2):20-22
(上接第 10 页)
一部分代码分成三个文件:OS_CPU.H,OS_CPU_A.ASM, OS_CPU_C.C。而基于μ C/OS- Ⅱ编写应用程序时,需 要改写 OS_CFG.H 和 INCLUDES.H 两个文件。OS_CFG.H 文件里与预定义了很多配置内核服务功能的开关量以 及一些与μ C/OS- Ⅱ相关的常量,用户可以根据具体 应用程序的特点配置该文件。 3.2 移植的具体工作
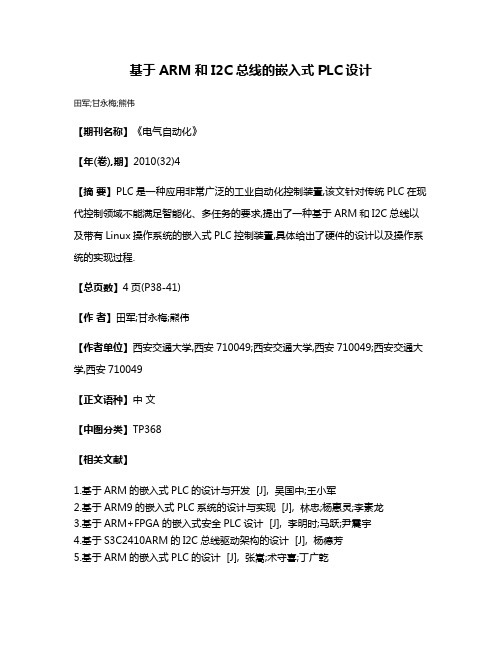
本系统以 ARM 芯片 LPC2294 为 CPU,设计为 16 路 输入、12 路输出的基本模式。电源及复位电路保证系 统运行的稳定,扩展 Flash 存储器主要用于应用程序 的存储。RS-485 通信接口既可用于程序的下载也可以 用作系统的监控,同时增加基于 RTL8019AS 的以太网 接口,使系统的通信能力增强。硬件总体结构包括: ARM微控制器、存储器扩展模块、输入模块、输出模块、
(下转第 23 页)
《自动化与仪器仪表》2008 年第 3 期(总第 137 期)
该模糊控制系统已应用到光纤熔缩机项目中,在 整个控制过程中,熔缩棒进气端和出气端的压力差稳 定在 1.5 ̄4Pa 之间,满足光纤棒熔缩要求,对压力跟 踪能力强。
参考文献 1 陈理君, 微机模糊控制[M].武汉:武汉理工大学出版社,
3 μC/OS-Ⅱ在LPC2294上的移植 3.1 μ C/OS- Ⅱ移植所需条件
所谓移植,就是使一个实时内核能在某个微控制 器或微控制器上运行。将μ C/OS- Ⅱ移植到不同处理 器平台时,需要解决的主要问题有:
(1)数据类型的重定义; (2)堆栈结构的设计; (3)任务切换时的状态保存与恢复。 μ C/OS- Ⅱ的结构以及它与硬件的关系如图 2 所 示。
9
RS485 接口及以太网接口通信模块、电源及复位模块 等。系统的结构如图 1 所示。
电源及 复位电路
JTAG 调 试接口
输
输
入
ARM 微控制器
模
出 模
块
电
LPC2294
块 电 路
路
Flash 存储器
网络通 信接口
图1 系统的整体结构
2 操作系统的选择 2.1 嵌入式操作系统介绍
传统的单片机系统在程序设计上一般采用的是前 后台方式或超循环方式,这种设计方式对于实时性强 的任务都是靠中断服务程序保证的。但是中断服务程 序提供的信息一直要等到后台程序走到该处理这个信 息这一步时才能得到处理,所以这种系统处理信息的 及时性较差。随着应用的智能化、复杂化,传统的单 片机系统将不能满足同时监控多个外部设备,且要求 较高的实时性,以及同时处理多个任务的要求。而实 时嵌入式操作系统(RTOS)提供了新的应用程序设计思 想和结构框架,使以上问题得以解决。