轨迹跟踪调研
《运动控制系统》课程设计任务书

理解运动控制系统的基本原理和组成 掌握运动控制系统的调试方法 掌握运动控制系统的优化方法
提高运动控制系统的性能和稳定性 提高运动控制系统的适应性和灵活性 提高运动控制系统的可靠性和安全性
确定运动控制系统的目标和需求
编写运动控制系统的软件代码
选择合适的运动控制算法和硬件设备
测试和调试运动控制系统
系统原理:阐述运动控制系统的基本原理和设计思路 硬件组成:详细描述运动控制系统的硬件组成和功能 软件编程:介绍运动控制系统的软件编程方法和实现过程 调试过程:描述运动控制系统的调试过程和注意事项
性能优化:优化运动控制系统 的性能,如提高响应速度、降 低能耗、提高稳定性等
基本功能:实现运动控制系统 的基本功能,如速度控制、位 置控制、力控制等
趋势
方案论证:对初步设计方案进 行论证,确保方案的可行性和
创新性
硬件选型:选择合适的传感器、控制器、执行器等硬件设备 硬件搭建:根据硬件选型结果,搭建运动控制系统的硬件平台 编写硬件电路原理图:根据硬件搭建结果,绘制硬件电路原理图 编写硬件PCB图:根据硬件电路原理图,绘制硬件PCB图,用于制作电路板
测试方法:模拟实际应用场 景进行测试
测试目的:验证系统功能是 否满足设计要求
测试内容:系统稳定性、准 确性、响应速度等
优化方法:根据测试结果进 行系统优化,提高系统性能
制定设计方案:根据设计题 目,制定初步设计方案
确定设计题目:根据课程要 求,选择合适的设计题目
文献调研:查阅相关文献,了 解相关领域的研究现状和发展
提高系统的响应速度 降低系统的误差 提高系统的稳定性
优化系统的控制算法 提高系统的抗干扰能力 优化系统的人机交互界面
软件设计:包括系统架构设 计、模块划分、接口设计等
临床医学教学管理系统

临床医学教学管理系统同济大学附属方医院是一所集医疗、教学和科研为一体的甲等综合性公立医院。
2001年成为同济大学的附属医院,目前承担着来自同济大学等多所院校的临床各专业本科、研究生以及留学生的理论见习课程和临床实习轮转带教任务.目前,在院本科生、研究生和留学生600余名.医院成立教学办公室作为专职的教学管理机构.1.1需求及其难点分析ﻭﻭ方医院临床医学教学管理系统在进行信息化改造的过程中有以下需求:①需要对学生和教师的全流程行为进行跟踪管理;②需要保障教学质量并进行量化评估,实现教学管理任务过程的可视化;③需要通过信息化改造进一步提升医学教育的效率,即通过引入人工智能技术提高自动化、智能化水平,同时不增加;④建立临床教学管理相关数据的科学性管理,挖掘临床教学管理的数据价值.该系统在信息化改造方面有以下难点:①临床课程教学形式和方法多样,课时数多,排课难度和工作量大.近年来,方医院的教学业务范围扩展迅速,接收国内多所医学院校、多个专业的理论授课和实习教学,且长、短期实习的留学生众多.其临床教学系统的课程复杂,涉及学科多,课程类型复杂,包括理论教学、见习、PBL授课、CBL授课、教学查房、小讲课、技能训练等,课时数庞大,每年完成56门课程授课,总学时达3000以上,人工排课效率低且易出错.②各专业实习轮转和课程同步进行,管理难度大.该院实习生来自多所医学院校,专业多、人数多,实习大纲和实习进度不统一。
以临床医学专业为例,学生需要进行内、外、妇、儿多个科室轮转实习,且各个院校进出实习日期不一致,实习轮转计划和课程制定须在符合实习大纲的基础上,兼顾多个教研室实习人数的均衡性。
③学生成长轨迹可视化分析需求.医学教育应以学生为中心,学生成长轨迹可视化分析是教育转型的新探索.在信息化助力下,系统自动生成各种数据统计图表,度成长档案,包括过程记录、师生互动、性评价、终结性考核、技能操作等方面,学生的成长不再是枯燥的分数,而是全面成长的轨迹。
小学五年级数学教学中的教学调研与分析

小学五年级数学教学中的教学调研与分析在小学五年级数学教学中,教学调研与分析是一项重要的工作。
通过对学生的学习情况进行调查和分析,可以更好地了解他们的学习情况和问题,进而指导教师的教学策略和方法。
本文将围绕小学五年级数学教学中的教学调研与分析展开讨论,从调查方法、数据分析和教学指导三个方面探究如何进行有效的教学调研与分析。
一、调研方法教学调研是指通过收集各种信息和数据,深入了解学生在数学学习中所面临的问题和困难,并据此制定有效的教学改进措施的过程。
为了达到准确、全面的效果,我们可以采取以下几种方法进行调研:1.观察法:通过观察学生的学习情况、行为表现和解题过程等,了解他们在数学学习中存在的问题和难点。
例如,在教学过程中,教师可以仔细观察学生的思维方式和解题思路,发现他们在哪些方面存在困难。
2.访谈法:通过与学生进行面对面的交流,了解他们对数学学习的态度、兴趣以及存在的问题。
在访谈过程中,可以针对学生的问题进行深入的探讨和分析,以便更好地帮助他们解决问题。
3.问卷调查法:通过设计问卷,征求学生的意见和建议。
问卷可以涉及到学生对数学学习的兴趣、学习方法的选择、教学内容的难易程度等方面,从而帮助教师了解学生的需求,并根据调查结果进行相应的教学改进措施。
二、数据分析在进行教学调研后,我们需要对收集到的数据进行分析,从中发现问题,并据此制定相应的教学策略和措施。
下面是一些常见的数据分析方法:1.统计分析:通过对学生的测试成绩、作业完成情况等数据进行统计,分析学生在数学学习中普遍存在的问题和困难,以及他们的优势和不足之处。
2.对比分析:将学生的成绩和学习方法进行对比,找出存在的差异和问题。
例如,比较学习成绩好和差的学生,分析他们学习的特点和差异,从而找到提高整体成绩的方法。
3.成长轨迹分析:通过跟踪学生的学习过程和成绩变化,分析学生在数学学习中的成长轨迹。
这可以帮助教师了解学生的学习情况和进步,及时采取相应的教学措施。
基于视频序列的目标检测与跟踪的开题报告

基于视频序列的目标检测与跟踪的开题报告一、研究背景随着计算机视觉技术的不断发展和深度学习算法的普及,目标检测和跟踪成为了计算机视觉领域的重要研究方向。
目标检测是指在图像或视频序列中,自动检测出图像或视频中的所有目标,并对其进行定位和分类。
目标跟踪是指在视频序列中,对一个或多个目标进行跟踪,以实现目标的轨迹跟踪。
目标检测和跟踪的应用广泛,包括智能交通领域中的车辆和行人监测、智能安防领域中的人脸识别和行为分析、无人机领域中的目标跟随等。
在实际应用中,视频序列中存在很多干扰因素,例如光照变化、目标尺度变化、目标遮挡等等,这些因素都会对目标检测和跟踪的结果产生影响。
因此,如何提高目标检测和跟踪的鲁棒性和准确性是一个重要的研究课题。
二、研究内容本文拟研究基于视频序列的目标检测与跟踪方法,具体研究内容如下:1. 探究目标检测和跟踪的常用算法,包括传统算法和深度学习算法,并选择其中几种具有代表性的算法进行深入研究和分析。
2. 针对视频序列中存在的干扰因素,研究如何提高目标检测和跟踪的鲁棒性和准确性,包括对目标尺度的自适应调整、对目标的遮挡和漏检的处理等。
3. 设计和实现一个基于视频序列的目标检测和跟踪系统,通过实验对系统进行验证和评价,包括系统的检测和跟踪准确率、系统的实时性和鲁棒性等。
三、研究意义本文的研究意义在于:1. 提供一种基于视频序列的目标检测和跟踪方法,拓展了计算机视觉领域中的研究方向。
2. 提高目标检测和跟踪系统的鲁棒性和准确性,为实际应用提供更为精准和可靠的技术支持。
3. 为其他相关研究提供参考和借鉴,推动计算机视觉技术的发展和应用。
四、研究方法本文主要采用文献调研、算法分析、系统设计和验证实验等方法进行研究。
具体步骤如下:1. 进行文献调研,了解目标检测和跟踪的研究现状和发展趋势,收集和整理相关论文和资料。
2. 对比并分析目标检测和跟踪的常用算法,筛选出具有代表性和优劣比较明显的算法进行深入研究。
交通监控系统调研报告
交通监控系统调研报告交通监控系统调研报告一、研究背景及目的:随着城市交通密度的增加,交通安全问题日益突出,交通监控系统的重要性逐渐凸显。
本次调研旨在了解交通监控系统的发展现状、功能特点以及应用范围,为进一步推动交通监控系统的应用提供参考。
二、调研方法:通过文献资料的查阅和交流沟通的方式获取相关信息。
本次调研主要关注交通监控系统的技术特点、数据处理、信息管理、应用场景等方面。
三、调研结果:1. 技术特点:交通监控系统采用数字化视频监控技术,通过视频监控摄像头对交通路口、隧道、高速公路等交通关键区域进行全天候监控,实时获取视音频数据。
系统利用计算机视觉和图像处理等技术,实现车辆识别、交通流量监测、违规驾驶监控等功能。
2. 数据处理:交通监控系统通过视频图像处理技术对采集的视频数据进行分析和判别,实现车辆的自动识别、行驶轨迹跟踪、事故预警等功能。
系统还能对交通流量进行统计分析,为交通规划和道路建设提供数据支持。
3.信息管理:交通监控系统通过数据中心实现信息的集中管理和存储,包括摄像头位置、视频数据、交通事件记录等。
系统通过网络技术,支持监控台和相关部门对监控数据的实时查看、查询以及数据的远程传输。
4. 应用场景:交通监控系统广泛应用于城市交通、公路、高速公路、机场等交通管理场所。
通过交通监控系统,交通警察可以实时监控交通状况,及时发现交通违法行为,提高交通治理效果。
同时,交通监控系统还可以为交通事故处理及调查提供证据,并对交通流量进行统计分析,为交通管理提供参考。
四、调研结论:交通监控系统是一种重要的交通管理工具,通过数字化视频监控技术和图像处理技术,能够对交通状况进行实时监控和数据分析,提供决策支持和预警功能。
目前交通监控系统在城市交通、公路等领域得到广泛应用,但仍存在一些问题,如数据的存储和管理、数据的安全性等方面需要进一步完善。
未来,随着技术的不断发展,交通监控系统的功能将更加强大,应用范围也将进一步扩大。
LBS定位技术研究与发展现状
LBS定位技术研究与发展现状随着科技的快速发展,定位技术在日常生活和工作中的应用越来越广泛。
尤其是LBS(Location Based Services)定位技术,以其独特的优势在众多领域中发挥着重要作用。
本文将深入探讨LBS定位技术的发展现状及关键技术,展望未来的发展趋势和应用前景。
LBS定位技术是一种基于移动通信网络和卫星定位系统的定位技术,通过获取移动终端的位置信息,提供个性化的服务。
其应用范围广泛,包括但不限于智能交通、智能城市、智慧医疗、社交娱乐等领域。
随着5G网络的到来,LBS定位技术将迎来更广阔的发展空间。
目前,LBS定位技术主要采用混合定位技术,包括卫星定位、基站定位和WiFi定位等。
其中,卫星定位技术精度较高,但信号易受环境影响;基站定位技术简单可靠,但精度较低;WiFi定位技术精度相对较高,适用于室内定位。
针对不同场景和需求,选择合适的定位技术至关重要。
在市场竞争方面,LBS定位技术市场发展迅速,国内外企业争相布局。
例如,百度、高德地图、谷歌地图等都在LBS领域取得了显著成果。
随着物联网、智慧城市等领域的快速发展,LBS定位技术的应用场景也将不断增加。
LBS定位技术的关键技术包括UWB技术、蓝牙技术、卫星定位技术等。
UWB技术具有高精度、低功耗的优势,适用于短距离通信和室内定位;蓝牙技术具有低功耗、组网灵活的特点,适用于智能家居、物联网等领域;卫星定位技术则具有高精度、全球覆盖的优点,适用于各种户外定位场景。
在实际应用中,LBS定位技术已广泛应用于智能手机、物联网设备、航空等领域。
在智能手机方面,LBS定位技术可提供地图、导航、社交娱乐等多项服务;在物联网设备方面,LBS定位技术有助于实现设备间的协同通信和精准调度;在航空领域,LBS定位技术对于飞行器轨迹跟踪、空中交通管制等方面具有重要意义。
这些应用场景充分展示了LBS定位技术的价值所在。
展望未来,随着、5G网络等技术的快速发展,LBS定位技术将迎来更多的发展机遇和挑战。
雷达信号处理中的多目标跟踪算法研究

雷达信号处理中的多目标跟踪算法研究雷达信号处理是一门重要的技术,其应用范围广泛,可以用于目标识别、导航、探测和跟踪等领域。
而多目标跟踪算法则是其中的一个热点研究领域。
本文将从多目标跟踪算法的定义、算法种类、应用以及研究进展等多个方面进行论述。
一、多目标跟踪算法的定义多目标跟踪算法是指利用雷达信号处理技术对多个目标进行跟踪、定位、预测和识别的算法。
多目标跟踪算法的研究主要涉及到多个目标的特征提取、多个目标的数据关联和多个目标的运动轨迹预测等关键问题。
二、多目标跟踪算法的种类现在多目标跟踪算法的研究方向越来越多,聚类跟踪算法、批处理跟踪算法、传统滤波跟踪算法、无滤波跟踪算法、模型预测跟踪算法等多种算法已经被提出。
其中,聚类跟踪算法和批处理跟踪算法是较为常用的算法。
聚类跟踪算法是指在雷达扫描范围内针对所有目标的特征信息进行空间聚类,并确定目标数目。
这种算法将时间和空间信息相结合,能够获得非常准确的结果,但是难以实现实时性。
而批处理跟踪算法则是通过信息提取、特征关联、轨迹预测等步骤来实现目标跟踪。
该算法主要通过运用卡尔曼滤波和粒子滤波的方法,来对目标进行跟踪和预测,以期提高目标跟踪的精度和实时性。
三、多目标跟踪算法的应用多目标跟踪算法广泛应用于军事领域、航空航天、交通管制、环境监测、自动驾驶等众多领域。
例如军事领域中,雷达系统需要对附近的各类目标进行跟踪,通过多目标跟踪算法,能够快速确定目标位置、类型等重要信息,并对敌方目标进行监测。
在航空航天领域,多目标跟踪算法能够将飞行器上的雷达数据进行有效处理,实现对众多空中目标的探测和追踪。
在交通管制中,多目标跟踪算法则可以用于市场调研和广告投放等领域,以及城市交通流量的监测与分析等方面。
四、多目标跟踪算法的研究进展近年来,多目标跟踪算法的研究进展非常迅速。
基于卡尔曼滤波理论的多目标跟踪算法,以及基于数据驱动的深度学习算法已经成为该领域的研究热点。
卡尔曼滤波理论在多目标跟踪算法研究中应用广泛,同时,基于卡尔曼滤波理论的多目标跟踪算法的精度和速度也得到了精细化的提升。
全方位移动康复机器人重心偏移时的轨迹跟踪控制
全方位移动康复机器人重心偏移时的轨迹跟踪控制姜莹【摘要】在大量全方位移动康复机器人训练案例中发现,移动康复机器人由于重心偏移在训练过程中往往偏离既定轨迹,现在移动康复机器人重心偏移时的轨迹跟踪已经成为一个亟需解决的问题.本文即针对全方位下肢康复机器人重心偏移和负载变化提出一种轨迹跟踪控制策略,主要包括三方面内容:1)全方位移动康复机器人的运动学、动力学建模;2)提出一种新型轨迹跟踪方法消除重心偏移和负载变化带来的影响;3)仿真验证所提出控制方法对康复机器人跟踪行之有效.【期刊名称】《电子测试》【年(卷),期】2018(000)008【总页数】4页(P5-7,27)【关键词】全方位康复机器人;轨迹跟踪;重心偏移;建模【作者】姜莹【作者单位】沈阳化工大学信息工程学院,辽宁沈阳,110142【正文语种】中文0 引言目前,我国和世界上一些国家一样,正在步入低出生率的老龄化社会[1]。
大量医学数据表明,老年人四肢灵活性急剧下降,急性心脑血管疾病和神经系统疾病的发病率明显增高[2],多数患者伴随偏瘫症状,患心脑血管疾病的人群呈年轻化趋势[3]。
交通方面,近年由于交通事故导致的肢体损伤人数在逐年上升,各领域对康复训练的需求明显增加。
然而,目前正面临着专业康复医护人员严重短缺和高额的医疗费用等问题。
因此,及时研制一种帮助下肢行动不便患者恢复训练用的全方位下肢康复机器人是十分必要的,正确、科学的康复训练对患者肢体运动功能的恢复和提高将起到重要作用。
全方位康复机器人是一个集多种运动、训练模式为一体的复杂过程,本文聚焦重心偏移和患者自身负载变化对非线性全方位康复机器人轨迹跟踪精度的影响。
最优控制[4-6]虽然能够对评价指标获取一个最优值,但是设计最优控制器需要被控参数的精确值;PID控制[7]尽管不需要被控参数的精确值,可以通过内部调节获取参数最优值,但是,对象参数一旦发生改变,PID控制器参数就需要被反复调节。
因此,对重心发生变化时的康复机器人准确跟踪,那些适用于线性对象的模型参考自适应控制和PID控制已不适用于非线性全方位康复机器人。
蟠龙滑坡演化过程离散元模拟分析

蟠龙滑坡演化过程离散元模拟分析王帆;焦振华;焦萱【摘要】The paper introduces the basic geological features of Panlong landslide ,analyses the internal and external fac-tors of itsformation,simulates the evolution of the landslide by discrete element software 2D-Block,and finally under-stands the characteristics of landslide deformation .Characteristic of Panlong landslide is significant and representative .To this Landslide investigation and prevention of this kind of landslide is of great practical significance .%介绍蟠龙镇滑坡的基本地质特征,分析其形成的内外因素,同时应用2D-BLOCK离散元软件对蟠龙镇滑坡形成演化进行模拟。
模拟结果清楚地还原了蟠龙镇滑坡发生发展的全过程。
蟠龙镇滑坡特征明显,具有代表性,对该类滑坡的调查和预防具有十分重要的现实意义。
【期刊名称】《资源环境与工程》【年(卷),期】2016(030)003【总页数】4页(P283-286)【关键词】滑坡;离散元;演化过程【作者】王帆;焦振华;焦萱【作者单位】陕西省水利电力勘测设计研究院,陕西西安 710001;陕西省水利电力勘测设计研究院,陕西西安 710001;华北水利水电大学,河南郑州 450046【正文语种】中文【中图分类】P642.22蟠龙滑坡位于延安市宝塔区蟠龙川河道岸边斜坡中下部缓坡地带。
煤矿综采工作面采煤机智能开采技术应用试验研究

煤矿综采工作面采煤机智能开采技术应用试验研究摘要:近年随着人工智能、机器人等领域的快速发展,加快了煤矿智能化建设进程。
一直以来,煤炭开采效率、安全性和成本是煤矿企业关注的主要问题;同时,煤炭作为我国国民经济发展的主要动力,实现煤炭的安全高效开采对于经济发展和社会进步具有重要意义。
“智能化”是未来所有行业发展的趋势,煤炭行业也不例外。
实现煤矿综采工作面的智能化开采旨在根据工作面的地质条件、煤层条件以及瓦斯等情况,采用理论分析与实践经验相结合的方式实现对工作面煤层的智能化开采。
关键词:煤矿综采工作面;采煤机;智能开采;技术应用引言目前国内煤矿工作面的开采设备均处于机械化开采阶段,并逐步朝着智能化方向迈进。
而煤矿综采工作面采煤机的智能开采技术大多是基于对采煤机高精度的轨迹跟踪,包括记忆截割、人工远程干预两个方向。
1煤矿综采工作面采煤机智能开采技术应用背景薄煤层广泛分布于我国80多个矿区,工业储量丰富,可达98.3亿t,其中可采储量约为65亿t,占全部可采储量的20%左右,但是薄煤层的开采过程中,较大的劳动强度、极低的机械化程度和经济效益,导致各类矿区普遍存在弃采现象,造成了煤炭资源的浪费。
薄煤层产量仅占全国煤炭产量的10%左右,安全高效开采薄煤层是提高煤炭资源采出率的重要途径。
相较于中厚煤层和厚煤层,薄煤层开采有如下特征:①采掘空间狭小,设备运转空间有限,人员活动区域小,且易受地质条件影响;②人员在工作面行走、作业困难,劳动强度大;③作业环境恶劣,职业危害加大。
因此,需研发配套的智能开采技术,以此增加薄煤层开采的自动化程度,降低开采成本,增加开采效益。
智能化开采也是我国煤炭行业升级转型的必由之,目前,我国煤矿仍处于智能化开采的初级阶。
薄煤层的智能化开采是在绿色开采理念指导下,采用成套智能化采煤装备和人工智能技术,实现工作面规模化安全高效绿色开采。
随着综采工作面智能化开采向深水区攻关,行业提出了基于透明工作面的智能化开采设想,以增强煤层赋存感知、实现综采装备与开采空间融合关联、构建实时数据支撑的动态透明工作面为研究方向,达到综采装备的智能决策和自主执行。
全班32人保送名牌大学_quot_最牛班级_quot_扎堆保送惹争议(整理精校版)

全班32人保送名牌大学_quot_最牛班级_quot_扎堆保送惹争议素材汇编0202 1010去年4月,华南师大附中的保送生们在高考前集体接受媒体采访,谈笑风生新快报记者夏世炎摄精英校、精英班集中了大量保送名校的精英学生,有评论认为这是教育资源不均衡所导致最近,教育部在阳光高考网站上公示了全国各省市区的部分保送生资格名单,导致“最牛”这个网络热词又出现了,不过这次的“牛”是真的很牛———全国各地,精英荟萃的尖子学校、尖子班级不断涌出,他们的成绩优异得令人咋舌,而这些精英的集中程度也远远超过人们的想象。
虽然学习成绩优异一直以来受人尊敬,但这些“最牛”班级和学校的出现却招来不少非议。
究其根源,仍在“差距”和“公平”二词。
———编者按上海最牛全班被保送顶级名校“做一班学生,成一流人才。
”这是华东师大二附中2015届1班上最醒目的一句话。
50多个花季孩子也用他们的表现证明了这一点:目前该班54个学生中,31个获清华大学保送资格,15个获北京大学保送资格,余下的8个学生也分别获得了上海交大和复旦大学的保送资格。
继去年4个“竞赛男”联手打造“最牛寝室”后,今年又出现了一个“最牛班级”。
最牛秘诀是脚踏实地“最牛班级”的54名成员由49个男生和5个女生组成。
他们基本上都是因学科竞赛和创新大赛中的优异表现而被名牌高校相中的。
许多人认为,这些“牛班”里的“牛人”应该都是聪明绝顶的天才,读书对他们来讲犹如探囊取物般容易。
实际上,成就“最牛班级”的秘诀除了天资聪明外,良好的学习“小环境”和脚踏实地的学习精神更为关键。
“我坚持认真地上好每节课,记好每一次笔记,这相当于老师帮助你把厚厚的教科书变薄了。
”何笑添是“最牛班级”的劳动委员,一当就是三年。
选择了这个“苦差事”,是因为他认为自己应该踏踏实实地做好每件事。
周彦栋是班级的日常规范部部长,却不喜欢太多束缚。
他对“最牛班级”里互帮互助的学风印象深刻:“有哪个同学去书城看了好的书,回来都会和大家分享,共同研究。
大庆油田管理干部培养轨迹规律研究

2020年11期 (4月中旬)经济管理摘要:培养选拔优秀管理干部,是关系企业各项事业兴旺发达、薪火相传的根本保证,是适应新时代、应对新挑战的战略抉择。
本文紧密结合大庆油田实际,阐释大庆油田管理干部培养轨迹规律:直线渐进式、偶发阶跃式、上下迂回式、复合交叉式四种轨迹。
在对照规律基础上,提出加强管理干部培养的优化建议,为大庆油田加快建设一支政治素质高、职业素养好、数量充足、结构合理的管理干部队伍提供参考。
关键词:管理干部;培养轨迹规律;培养优化建议一、研究意义习总书记指出:“干部成长是有规律的,年轻干部从参加工作到走向成熟,成长为党和国家的中高级领导干部,需要经过必要的台阶、递进式的历练和培养。
”大庆油田作为国有企业,必须把干部培养选拔作为头等大事来抓,着手于眼前,着力于基础。
培养造就大批优秀管理干部,是油田各项事业发展和振兴发展目标实现的有力保障。
本文研究大庆油田副科级及以上管理干部的培养轨迹规律。
管理干部区别于专业技术人员、操作岗员工,具体指行政干部、党群干部、技术干部等副科级及以上管理人员。
培养规律是指除去自身努力、客观环境条件等,通过组织培养作用促进管理干部成长的一般性规律。
培养轨迹规律反映了管理干部职级晋升的动态过程,是组织培养效果的外在体现。
二、研究思路及方法(一)研究思路围绕大庆油田管理干部这一研究对象,循着描摹轨迹这条线路,从归纳和演绎两个逻辑,应用逆向追溯法、纵向跟踪法、横向比较法、调查统计法四种研究方法验证模型和轨迹,归纳出大庆油田管理干部培养轨迹规律。
结合规律演绎,提出管理干部培养的优化建议。
(二)研究方法研究选取中石油集团公司相关领导的履历(155位,以下简称样本)作参照,采用逆向追溯法、纵向跟踪法、横向比较法、调查统计法等四种研究方法进行研究。
一是逆向追溯法。
逆向回溯分析即从优秀管理干部现有行为中追溯其产生的根源。
二是纵向跟踪法。
对某一层次、某一类型管理干部的各个成长阶段进行延伸研究。
智慧校园智能化信息化系统建设方案
06
实施步骤与计划
准备阶段
需求调研
深入了解学校的需求和期望, 明确系统建设目标。
技术选型
根据需求,选择合适的技术和 解决方案。
项目团队组建
组建一支由技术专家、项目经 理和实施人员组成的团队。
制定实施计划
制定详细的项目实施计划和时 间表。
建设阶段
系统设计与开发
根据需求调研,进行系统设计和开发工作。
设施维修管理
对校园内的设施进行智能化维修和管理,确保设施的正常运行和使 用。
环境卫生管理
对校园内的环境卫生进行智能化管理,保持校园的整洁和卫生。
智能教学评估
在线教学评估
通过智能化系统对在线教学质量 进行评估和反馈,提高在线教学 质量。
教学质量监测
通过智能化系统对传统课堂教学 质量进行监测和评估,为教学改 进提供数据支持。
管理风险与对策
要点一总Biblioteka 词管理风险是影响智慧校园建设的重要因素,需要建立完善 的管理机制来应对。
要点二
详细描述
管理风险包括项目管理、人员管理、制度管理等方面的问 题。为了应对这些风险,需要建立完善的管理机制,明确 各方的职责和权限,确保项目的顺利推进;同时,要加强 人员培训和管理,提高团队的整体素质和能力;此外,要 制定详细的管理制度,规范各项工作的流程和标准,确保 工作的质量和效率。
智慧校园能够为师生提供更加 便捷、高效、智能的服务,提 升教育教学的质量和效率。
当前,许多学校已经认识到智 慧校园的重要性,并开始着手 进行相关建设。
建设目标
构建一个智能化、信息化、高效化的校园环境,提升学校的管理水平和教学能力。
通过智能化系统建设,实现校园内各项业务的信息化管理和服务,提高工作效率和 便捷性。
机器人开题报告
毕业设计(论文)开题报告――智能移动机器人系统设计一.设计目的及意义随着计算机、网络、机械电子、信息、自动化以及人工智能等技术的飞速发展,移动机器人的研究进入了一个崭新的阶段。
同时,太空资源、海洋资源的开发与利用为移动机器人的发展提供了广阔的空间。
目前,智能移动机器人,无人自主车等领域的研究进入了应用的阶段,随着研究的深入,对移动机器人的自主导航能力,动态避障策略,壁障时间等方面提出了更高的要求。
地面智能机器人路径规划,是行驶在复杂动态自然环境中的全自主机器人系统的重要环节,而地面智能机器人全地域全自主技术的研究,是当今国内外学术界面临的挑战性问题。
移动机器人是一类能够通过传感器感知环境和自身状态,实现在有障碍物的环境中面向目标自主运动,从而完成一定功能的机器人系统。
理想的自主移动机器人可以不需人的干预在各种环境中自主完成规定任务,具有较高的智能水平,但目前全自主的移动机器人还大多处于实验阶段,进入实用的多为自主移动机器人,通过人的干预在特定环境中执行各种任务,而遥控机器人则完全离不开人的干预。
智能移动机器人是一类能够通过传感器、感知环境和自身状态,实现在有障碍物的环境中面向目标自主运动,从而完成一定功能的机器人系统。
移动机器人技术研究综合了路径规划、导航定位、路径跟踪与运动控制等技术。
涉及包括距离探测、视频采集、温湿度以及声光等多种外部传感器,作为移动机器人的输入信息。
移动机器人的运动控制主要是完成移动机器人的运动平台,提供一种移动机器人的控制方式。
性能良好的移动机器人运动控制系统是移动机器人运行的基础,能够服务于移动机器人研究的通用开发平台。
随着移动机器人技术的发展及其在工业军事等领域中的广泛应用,有关移动机器人的理论设计制造和应用的新的技术学科——机器人学,已经逐渐形成,并越来越引起人们广泛的关注。
机器人学是一门综合性很强的学科,它涉及现代控制技术、传感器技术、计算机系统和人工智能等多门学科.但是它又有自身的系统性和专业性。
关于叉车轨迹跟踪系统详细设计说明书

文档历史记录叉车轨迹跟踪系统详细设计说明书文件更改摘要第1 页共34 页目录目录 (2)1. 概述 (4)1.1. 项目背景 (4)1.2. 项目定义 (4)2. 项目建设规划 (4)2.1. 建设总体思路 (4)系统设计总览 (4)业务应用扩展 (6)2.2. 阶段规划 (6)第一阶段 (6)第二阶段 (6)第三阶段 (6)3. 系统框架设计 (7)3.1. 系统架构设计 (7)3.2. 系统功能设计 (7)系统逻辑结构 (8)4. 系统功能设计 (8)4.1. 功能概述 (8)4.2. 功能设计 (8)4.2.1、地图管理 (8)4.2.2、基站管理 (10)4.2.3、标签管理 (15)4.2.4、围栏管理 (19)4.2.5、其他功能 (24)第2 页共34 页5. 数据模型及接口设计 (28)5.1权重数据模型 (28)5.2 操作系统细粒度字段数据模型 (28)5.3其他类型数据模型 (31)6. 系统非功能设计 (33)6.1. 数据库类型 (33)6.2. 网络操作系统 (33)6.3. 性能要求 (33)7. 接口需求 (33)7.1. 硬件接口 (33)7.2. 软件接口 (33)7.3. 通讯接口 (33)8. 代码安全 (34)第3 页共34 页1.概述1.1.项目背景联想深圳工厂的叉车管理比较复杂,目前无法通过统一的系统对叉车的行踪进行追溯管理,导致叉车寻找、工作量、位置等情况一无所知。
基于此项目背景需求,工厂希望有一套系统能将叉车完好地管理起来,实现叉车有序管理,提高现场工作效率。
具需求如下:通过IOT的技术来实时动态自动采集所需要的叉车的数据,比如叉车的行动轨迹,行进的距离等信息。
通过后台的信息整合,可以实现现场看板展示。
通过后台的算法,可以进行更多的分析,为我们提高管理做决策支持。
1.2.项目定义项目名称:叉车轨迹跟踪系统安装和调试服务项目;使用单位:深圳联想懂的通信有限公司;2.项目建设规划2.1.建设总体思路系统设计总览(1)定位基站主要指标:⏹基站采用无线同步模式;⏹组网采用标准以太网模式,网络兼容性好;⏹供电支持DC及POE两种模式;⏹外壳具有IP30室内及IP67室外两个保护等级;(2)定位标签主要指标:⏹通用性标签体积小巧、外观专业.⏹标签采用高性能锂电池.⏹具有很好的节电设计,支持静态休眠。
全流程视角下大学生行为画像系统设计研究
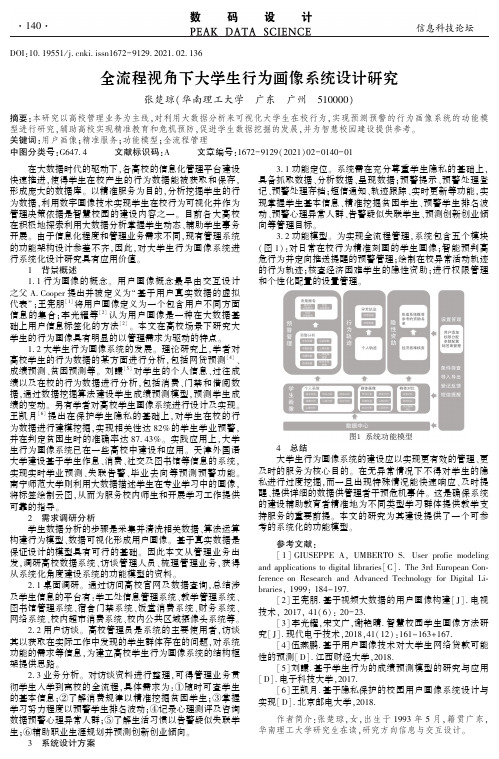
DOI:10.19551/ki.issn1672-9129.2021.02.136全流程视角下大学生行为画像系统设计研究张楚琼(华南理工大学㊀广东㊀广州㊀510000)摘要:本研究以高校管理业务为主线,对利用大数据分析来可视化大学生在校行为,实现预测预警的行为画像系统的功能模型进行研究,辅助高校实现精准教育和危机预防,促进学生数据挖掘的发展,并为智慧校园建设提供参考㊂关键词:用户画像;精准服务;功能模型;全流程管理中图分类号:G647.4㊀㊀㊀文献标识码:A㊀㊀㊀文章编号:1672-9129(2021)02-0140-01㊀㊀在大数据时代的驱动下,各高校的信息化管理平台建设快速推进,使得学生在校产生的行为数据能被获取和保存,形成庞大的数据库㊂以精准服务为目的,分析挖掘学生的行为数据,利用数字画像技术实现学生在校行为可视化并作为管理决策依据是智慧校园的建设内容之一㊂目前各大高校在积极地探索利用大数据分析掌握学生动态㊁辅助学生事务开展㊂由于信息化程度和管理业务需求不同,现有管理系统的功能架构设计参差不齐,因此,对大学生行为画像系统进行系统化设计研究具有应用价值㊂1㊀背景概述1.1行为画像的概念㊂用户画像概念最早由交互设计之父A.Cooper提出并被定义为 基于用户真实数据的虚拟代表 ;王宪朋[1]将用户画像定义为一个包含用户不同方面信息的集合;李光耀等[2]认为用户画像是一种在大数据基础上用户信息标签化的方法[2]㊂本文在高校场景下研究大学生的行为画像具有明显的以管理需求为驱动的特点㊂1.2大学生行为画像系统的发展㊂理论研究上,学者对高校学生的行为数据的某方面进行分析,包括网贷预测[4]㊁成绩预测㊁贫困预测等㊂刘譞[5]对学生的个人信息㊁过往成绩以及在校的行为数据进行分析,包括消费㊁门禁和借阅数据,通过数据挖掘算法建设学生成绩预测模型,预测学生成绩的变动㊂另有学者对高校学生画像系统进行设计及实现㊂王凯月[6]提出在保护学生隐私的基础上,对学生在校的行为数据进行建模挖掘,实现相关性达82%的学生学业预警,并在判定贫困生时的准确率达87.43%㊂实践应用上,大学生行为画像系统已在一些高校中建设和应用㊂天津外国语大学建设基于学生作息㊁消费㊁社交及图书馆等信息的系统,实现实时学业预测㊁失联告警㊁毕业去向等预测预警功能㊂南宁师范大学则利用大数据描述学生在专业学习中的画像,将标签绘制云图,从而为服务校内师生和开展学习工作提供可靠的指导㊂2㊀需求调研分析学生数据分析的步骤是采集并清洗相关数据㊁算法运算构建行为模型㊁数据可视化形成用户画像㊂基于真实数据是保证设计的模型具有可行的基础㊂因此本文从管理业务出发,调研高校数据系统㊁访谈管理人员㊁梳理管理业务,获得从系统化角度建设系统的功能模型的资料㊂2.1桌面调研㊂通过访问高校官网及数据查询,总结涉及学生信息的平台有:学工处信息管理系统㊁教学管理系统㊁图书馆管理系统㊁宿舍门禁系统㊁饭堂消费系统㊁财务系统㊁网络系统㊁校内超市消费系统㊁校内公共区域摄像头系统等㊂2.2用户访谈㊂高校管理员是系统的主要使用者,访谈其以获取在实际工作中发现的学生群体存在的问题,对系统功能的需求等信息,为建立高校学生行为画像系统的结构框架提供思路㊂2.3业务分析㊂对访谈资料进行整理,可得管理业务贯彻学生入学到离校的全流程,具体需求为:①随时可查学生的基本信息;②了解消费规律以精准挖掘贫困学生;③掌握学习努力程度以预警学生排名波动;④记录心理测评及咨询数据预警心理异常人群;⑤了解生活习惯以告警疑似失联学生;⑥辅助职业生涯规划并预测创新创业倾向㊂3㊀系统设计方案3.1功能定位㊂系统需在充分尊重学生隐私的基础上,具备抓取数据㊁分析数据㊁呈现数据;预警提示㊁预警处理登记㊁预警处理存档;短信通知㊁轨迹跟踪㊁实时更新等功能,实现掌握学生基本信息㊁精准挖掘贫困学生㊁预警学生排名波动㊁预警心理异常人群㊁告警疑似失联学生㊁预测创新创业倾向等管理目标㊂3.2功能模型㊂为实现全流程管理,系统包含五个模块(图1):对日常在校行为精准刻画的学生画像;智能预判高危行为并定向推送提醒的预警管理;绘制在校异常活动轨迹的行为轨迹;核查经济困难学生的隐性资助;进行权限管理和个性化配置的设置管理㊂4㊀总结大学生行为画像系统的建设应以实现更有效的管理㊁更及时的服务为核心目的㊂在无异常情况下不得对学生的隐私进行过度挖掘,而一旦出现特殊情况能快速响应㊁及时提醒㊁提供详细的数据供管理者干预危机事件㊂这是确保系统的建设辅助教育者精准地为不同类型学习群体提供教学支持服务的重要前提㊂本文的研究为其建设提供了一个可参考的系统化的功能模型㊂参考文献:[1]GIUSEPPE A,UMBERTO er profie modeling and applications to digital libraries[C].The3rd European Con-ference on Research and Advanced Technology for Digital Li-braries,1999:184-197.[2]王宪朋.基于视频大数据的用户画像构建[J].电视技术,2017,41(6):20-23.[3]李光耀,宋文广,谢艳晴.智慧校园学生画像方法研究[J].现代电子技术,2018,41(12):161-163+167. [4]伍燕鹏.基于用户画像技术对大学生网络贷款可能性的预测[D].江西财经大学,2018.[5]刘譞.基于学生行为的成绩预测模型的研究与应用[D].电子科技大学,2017.[6]王凯月.基于隐私保护的校园用户画像系统设计与实现[D].北京邮电大学,2018.作者简介:张楚琼,女,出生于1993年5月,籍贯广东,华南理工大学研究生在读,研究方向信息与交互设计㊂㊃041㊃。
智能视频分析系统项目计划书

智能视频分析系统项目计划书一、项目背景随着科技的不断发展,视频监控在各个领域的应用越来越广泛,从公共安全到商业运营,从交通管理到工业生产等。
然而,传统的视频监控仅仅依靠人工来观察和分析视频内容,效率低下且容易出现疏漏。
为了更好地利用视频监控所获取的大量信息,提高监控效率和准确性,智能视频分析系统应运而生。
智能视频分析系统能够自动对视频中的目标进行检测、识别、跟踪和分析,提取有价值的信息,并及时发出预警或提示,为决策提供支持。
它具有广泛的应用前景和巨大的市场潜力。
二、项目目标本项目的目标是开发一款功能强大、性能稳定、易于使用的智能视频分析系统,能够满足不同行业和场景的需求。
具体目标包括:1、实现对视频中人员、车辆等目标的准确检测和识别。
2、能够对目标的行为进行分析,如异常行为检测、轨迹跟踪等。
3、提供实时的预警和提示功能,及时发现潜在的安全隐患或问题。
4、支持大规模视频数据的处理和分析,具备良好的扩展性和兼容性。
三、项目需求分析1、功能需求目标检测:能够准确检测出视频中的人员、车辆、物品等目标。
目标识别:能够识别目标的类型、特征等信息。
行为分析:分析目标的运动轨迹、速度、停留时间等行为特征,判断是否存在异常行为。
预警功能:当检测到异常情况时,能够及时发出预警信号,如声音、弹窗等。
数据存储和检索:能够对视频数据和分析结果进行存储,并提供快速检索功能。
2、性能需求准确性:目标检测和识别的准确率要达到较高水平。
实时性:能够在规定的时间内完成视频分析任务,满足实时监控的要求。
稳定性:系统要能够长时间稳定运行,不易出现故障。
3、接口需求与现有视频监控系统的接口:能够兼容常见的视频监控设备和平台,实现无缝对接。
与其他系统的接口:如安防系统、报警系统等,实现数据共享和联动。
4、用户需求操作简单:提供简洁直观的用户界面,方便用户进行操作和管理。
定制化:能够根据不同用户的需求进行定制化配置。
四、项目技术方案1、系统架构前端采集模块:负责采集视频数据,并进行初步的处理和压缩。
跟踪造句10字
跟踪造句10字跟踪是一种追踪、监测、记录某人、某物或某个事件的活动。
在各个领域中,跟踪都被广泛应用,包括科学研究、竞技体育、社交媒体分析等。
以下是一些关于跟踪的常用词汇的造句,以及它们的相关参考内容。
1. 目标跟踪(Target tracking):- 我们需要开发一种新的目标跟踪算法,以提高机器人的定位准确性。
- "A Review on Video-Based Target Tracking Algorithms" (《基于视频的目标跟踪算法综述》) 这篇文章对目前的视频目标跟踪算法进行了综述和比较。
2. 数据跟踪(Data tracking):- 我们需要建立一个数据跟踪系统,以监测和分析我们的用户行为。
- "A Framework for Real-Time Data Tracking in IoT Systems" (《物联网系统中实时数据跟踪的框架》) 这篇论文介绍了一种用于物联网系统中实时数据跟踪的框架。
3. 轨迹跟踪(Trajectory tracking):- 我们需要设计一个能够对无人机的轨迹进行精确跟踪的控制器。
- "A Survey of Trajectory Tracking Control for Unmanned Aerial Vehicles" (《无人机轨迹跟踪控制的综述》) 这篇综述论文概述了无人机轨迹跟踪控制的研究现状和挑战。
4. 电话跟踪(Call tracking):- 公司利用电话跟踪技术,分析和监控客户服务团队的绩效。
- "The Impact of Call Tracking on Customer Service Performance" (《电话跟踪对客户服务绩效的影响》) 这篇研究报告分析了电话跟踪技术对客户服务绩效的影响。
5. 跟踪设备(Tracking device):- 警方使用了一种先进的GPS跟踪设备,以追踪犯罪嫌疑人的行踪。
调研报告运动打卡

调研报告运动打卡调研报告:运动打卡1. 引言运动打卡是一种记录与分享个人运动进程的方式,通过这种方式,人们可以跟踪自己的运动数据、设定目标并监督自己的运动计划。
本调研报告将对运动打卡应用进行调查研究,探讨其在个人健康管理中的作用和影响。
2. 调查方法为了获取关于运动打卡应用的详尽信息,我们采取了以下调查方法:(1)面对面访谈:与运动打卡应用的用户进行深入交流,了解他们对该应用的使用经验、感受和对健康管理的影响。
(2)在线问卷调查:设计和发布了针对运动打卡应用的问卷,收集更多用户群体的意见和反馈。
3. 调研结果调研结果显示,运动打卡应用在个人健康管理中起到了积极的作用:(1)激励个人运动:运动打卡应用通过记录个人运动数据和设定运动目标,激励用户保持坚持锻炼的动力。
(2)建立社交圈子:许多运动打卡应用提供社交功能,用户可以在平台上互动、分享运动成果,与朋友们一起挑战和激励彼此。
(3)提供专业指导:一些运动打卡应用通过合作伙伴关系得以提供健身教练的指导和建议,帮助用户更科学地锻炼。
4. 用户反馈我们调查的用户对运动打卡应用的反馈主要集中在以下方面:(1)习惯养成:许多用户表示,通过运动打卡应用,他们养成了良好的运动习惯,每天都会主动去参与运动并记录。
(2)激励动力:用户普遍认为,运动打卡应用的设定目标和提醒功能对他们坚持锻炼起到了很大的帮助。
(3)社交互动:用户们喜欢参与运动打卡应用的社交功能,他们可以查看朋友们的运动情况,相互鼓励和竞争。
5. 应用推荐基于调研结果和用户反馈,以下是几个受到用户欢迎的运动打卡应用推荐:(1)Keep:该应用提供丰富的运动课程和训练计划,用户可以根据自己的需求进行订制化的锻炼,并与朋友们一起完成挑战。
(2)Nike Training Club:作为一家著名的运动品牌,该应用提供多种运动训练和指导,通过运动打卡记录用户的运动成果。
(3)Strava:针对跑步和骑行爱好者的运动打卡应用,提供定位、计时等功能,能够详细记录用户的运动轨迹和数据。
基于CLIP模型的军事领域图片资源多模态搜索工具研究
基于CLIP模型的军事领域图片资源多模态搜索工具研究赵晋巍;刘晓鹏;罗威;程瑾;毛彬;宋宇
【期刊名称】《中华医学图书情报杂志》
【年(卷),期】2022(31)8
【摘要】深入调研梳理了OpenAI CLIP多模态模型和相关应用研究。
借助CLIP 模型,通过大规模军事相关图片数据集开展实验,设计开发了具有以文搜图和以图搜图功能的多模态搜索工具,且在实际测试中表现良好,可以为后续围绕军事相关图片的事件分类、目标检测、任务轨迹跟踪等方面的分析研究奠定基础。
【总页数】7页(P14-20)
【作者】赵晋巍;刘晓鹏;罗威;程瑾;毛彬;宋宇
【作者单位】军事科学院军事科学信息研究中心
【正文语种】中文
【中图分类】G254.37;G254.92
【相关文献】
1.基于CLIPS工具ICAD的研究
2.基于领域本体的垂直搜索引擎模型的研究
3.基于变分模态分解和引力搜索算法的径流预测模型研究
4.基于LDA模型的军事物流领域研究热点探析
5.基于互联网的元搜索引擎中领域搜索模型的设计
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
传统控制方法
PID控制:控制效果依赖于PID参数,参数整定又依赖于被控
对象的模型,通常需要对动力学模型进行简化,很多情况下无法 满足控制需要。
滑模控制:对控制对象模型不确定性和外界干扰具有很强的
鲁棒性,在轨迹跟踪控制中有较好表现,但是存在控制“抖动”。
反步控制:反步法通过李亚普诺夫控制函数构建反馈控制律,
水下机器人轨迹跟踪控制
研究背景
水下机器人具有高度非线性、强耦合特性, 受到各种复杂的水下环境干扰,因此水下机 器人的运动控制有较大难度。 轨迹跟踪控制的目标是通过控制速度和角速 度使水下机器人跟踪上期望路径,最终使期 望状态与实际状态间的误差收敛至零。
研究思路
水下机器人建模 轨迹跟踪控制器的设计 利用李雅普诺夫稳定性理论证明控制系统闭 环稳定性 仿真验证控制方法有效性
基于Lyapunov能量函数的迭代学习(由全局
Lipschitz连续非线性系统拓宽为局部Lipsch的迭代学习控制,
基于模糊技术的迭代习控制,基于小波分析的迭代学习控制等)
能力强,收敛速度快,鲁棒性和控制效果好。
混合智能控制方法
生物启发模型的反步滑模混合控制 模糊神经网络直接自适应控制 自适应神经网络模糊滑模遗传算法控制 模糊神经网络滑模变结构控制 自适应神经模糊推理系统
迭代学习
迭代学习控制适合于一类具有重复运行特性的被控对象, 其任务 是寻找理想控制输入, 使得被控系统的实际输出轨迹在有限时间 区间上沿整个期望输出轨迹实现零误差的完全跟踪, 并且整个控 制过程要求快速完成。 迭代学习目前广泛应用于实际控制工程领域, 其中最主要的应用 之一就是在机器人控制方面, 如刚性机器手控制 、机器人视觉 伺服控制;另外, 迭代学习控制还用于许多实时性要求较高的 工业控制过程中
计算简单、系统稳定性可以得到严格证明,缺点是在跟踪误差突 变时,特别是离散轨迹情形,存在机器人跟踪速度跳变问题。
自适应控制:在控制过程中能够不断学习,使系统结构参数
能够调整到它们的实际值,是具有参数不确定非线性系统设计和 分析的基本方法。
智能控制方法
模糊控制:采用一系列模糊if-then规则形式的语言信息来
描述系统,将语言信息和数据信息统一起来,它最大的优势是不 需要系统的精确数学模型,适用于比较复杂的不确定非线性系统。
神经网络控制:能够以任意精度逼近任意非线性函数,对
复杂不确定问题具有自适应和自学习能力,并行处理机制可以解 决大规模实时计算问题,具有很强的信息综合能力等。
遗传算法:不需要系统的精确模型,设计简单,全局搜索
迭代学习研究现状
线性迭代学习(主要包括P型、D型、PD型)
非线性迭代学习( Newton 型、割线型)
最优迭代学习(在每次迭代过程中跟踪误差不能特别大, 因此
运用最优化指标的分析方法设计学习算法)
基于2D系统的复合迭代学习(学习是按两个相互独立
的方向进行: 时间轴方向和迭代次数轴方向)