蜗轮蜗杆计算
蜗轮蜗杆计算

2、根据齿面形状不同分为:
普通蜗杆传动
圆弧圆柱蜗杆传动
3、阿基米德蜗杆
在轴剖面:直线齿廓 法剖面:凸曲线 垂直轴剖面:阿基米德螺线 车削加工,不能磨削,精度低。
蜗轮滚刀:与蜗杆尺寸相同 在中间平面上可看成直齿齿条与渐开线齿轮啮合
9.2 普通圆柱蜗杆传动的主要参数和几何尺寸计算
中间平面上的参数作为设计基准
单位时间由箱体外壁散发到空气中的热量为
H 2 K s A(t t0 )
W
式中 Ks—散热系数 A—散热面积 t—达到平衡时,箱体内的 油温,t在800以内 t0—周围空气温度, t0=200
根据热平衡条件H1=H2可求得既定工作条件下 的油温
t
t0
1000 P1 (1 )
Ks A
C
在既定工作条件下,保持正常油温所需要的 散热面积
一、蜗杆传动的特点和应用
1、特点:
单级传动比大; 结构紧凑; 传动平稳,无噪音; 可自锁; 传动效率低; 成本高。
2、应用:
机床:数控工作台、分度 汽车:转向器 冶金:材料运输 矿山:开采设备 起重运输:提升设备、电梯、 自动扶梯
二、蜗杆传动的类型
1、按蜗杆形状分
圆柱蜗杆传动
环面蜗杆传动 锥蜗杆传动
A 1000 P1 (1 )
K s (t t0 )
m2
一般应使t在80℃以下
若t>80℃或有效的散热面积不足时,则必须
采取措施,以提高其散热能力
常用措施: 1 、合理设计箱体结构,铸 出或焊上散热片,以增大散 热面积
2 、在蜗轮轴上装置风扇, 进行人工通风,以提高散 热系数
3 、在箱体油池内装 设蛇形冷却水管
[ ]H —蜗轮材料的许用接触应力,MPa
蜗轮蜗杆计算
蜗轮的计算公式:1传动比=蜗轮齿数×蜗杆头数2中心距=(蜗轮节圆直径+蜗轮节圆直径)△2三。
蜗轮中径=(齿数+2)×模数4蜗轮齿数×蜗轮模数5蜗杆螺距直径=蜗杆外径-2×模数6蜗杆引线=π×元件×头数7螺旋角(前角)TGB=(模数×头数)×蜗杆节径基本参数:蜗轮蜗杆模数m、压力角、蜗杆直径系数Q、导程角、蜗杆头数、蜗杆齿数、齿高系数(1)、间隙系数(0.2)。
其中,模数m和压力角是蜗轮轴表面的模数和压力角,即蜗轮端面的模数和压力角,两者均为标准值。
蜗杆直径系数q是蜗杆分度圆直径与其模数M的比值。
蜗轮蜗杆正确啮合的条件:在中间平面,蜗杆和蜗轮的模数和压力角分别相等,即蜗轮端面的模数等于蜗杆轴线的模数,即标准值。
蜗轮端面的压力角应等于蜗杆的轴向压力角和标准值,即==M。
当蜗轮的交角一定时,必须保证蜗轮和蜗杆的螺旋方向一致。
蜗轮结构通常用于在两个交错轴之间传递运动和动力。
蜗轮相当于中间平面上的齿轮和齿条,蜗杆和螺钉的形状相似。
分类这些系列大致包括:1。
Wh系列蜗轮减速器:wht/whx/whs/whc2;CW系列蜗轮减速器:CWU/CWS/cwo3;WP系列蜗轮减速器:WPA/WPS/WPW/WPE/wpz/wpd4;TP系列包络蜗轮减速器:TPU/TPS/TPA/tpg5;PW型平面双包环面环面蜗杆减速器;另外,根据蜗杆的形状,蜗杆传动可分为圆柱蜗杆传动、环形蜗杆传动和斜蜗杆传动。
[1]组织特征1该机构比交错斜齿轮机构具有更大的传动比。
2两轮啮合齿面间存在线接触,其承载能力远高于交错斜齿轮机构。
三。
蜗杆传动相当于螺旋传动,即多齿啮合传动,传动平稳,噪音低。
4当蜗杆的导程角小于啮合齿间的等效摩擦角时,该机构具有自锁性能,可以实现反向自锁,即只有蜗杆可以驱动蜗轮,而不能驱动蜗轮。
起重机械采用自锁蜗杆机构,其反向自锁性能能起到安全防护作用。
蜗轮蜗杆计算公式(简洁版)
0
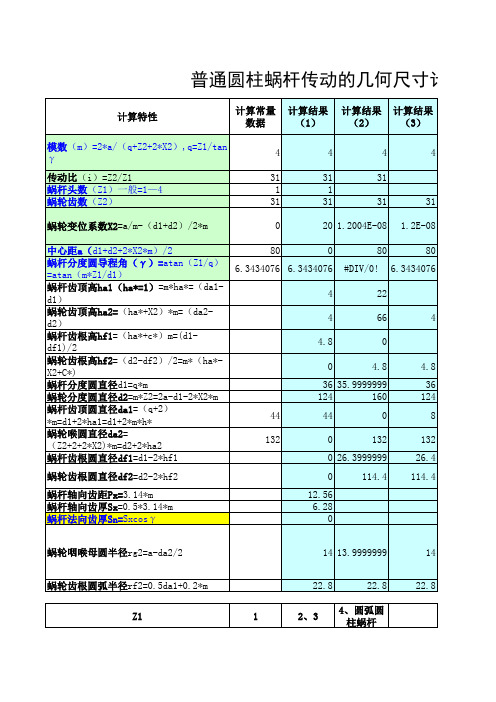
20 1.2004E-08 1.2E-08
中心距a(d1+d2+2*X2*m)/2 蜗杆分度圆导程角(γ)=atan(Z1/q) =atan(m*Z1/d1) 蜗杆齿顶高ha1(ha*=1)=m*ha*=(da1d1) 蜗轮齿顶高ha2=(ha*+X2)*m=(da2d2) 蜗杆齿根高hf1=(ha*+c*)m=(d1df1)/2 蜗轮齿根高hf2=(d2-df2)/2=m*(ha*X2+C*) 蜗杆分度圆直径d1=q*m 蜗轮分度圆直径d2=m*Z2=2a-d1-2*X2*m 蜗杆齿顶圆直径da1=(q+2) *m=d1+2*ha1=d1+2*m*h* 蜗轮喉圆直径da2= (Z2+2+2*X2)*m=d2+2*ha2 蜗杆齿根圆直径df1=d1-2*hf1
Z1大、 29.48
Z1小
Z1大、
33 29.48
普通圆柱螺杆L≥ X -1 -0.5 0 0.5 1
Z1=1~2 46
39.44 51.44 56.4 60.4
蜗杆螺纹部分长度L
圆弧圆柱蜗杆
Z1=3~4
X2
Z1
46
<1
1~2
49.16
1~1.5
1~2
61.16
<1
3~4
62.4
1~1.5
3~4
64.4
80
0
80
80
6.3434076 6.3434076 #DIV/0! 6.3434076
4
22
4
66
4
4.8
0
0
4.8
4.8
36 35.9999999
蜗轮蜗杆设计计算

蜗杆传动的效率计算
总结词
根据蜗轮蜗杆的设计参数和工况,计算出蜗杆传动的效率。
详细描述
蜗杆传动的效率计算是评估蜗杆传动性能的重要指标之一。通过分析蜗轮蜗杆的设计参 数和工况,如蜗杆的导程角、模数、转速和载荷等参数,可以计算出蜗杆传动的效率。
蜗轮齿面接触疲劳强度的计算
总结词
根据蜗轮齿面上的载荷分布和材料属性 ,计算出蜗轮齿面的接触疲劳强度。
刚度分析
进行蜗轮蜗杆的刚度分析, 以减小传动过程中的变形 和振动。
可靠性设计
为确保自动化设备的可靠 性,对蜗轮蜗杆进行可靠 性设计和寿命预测。
THANKS
感谢观看
材料应具备较好的抗疲劳性能,以承受交 变载荷的作用;
04
材料应具有良好的工艺性能,易于加工制 造。
04
蜗轮蜗杆设计计算方法
蜗轮齿面载荷分布计算
总结词
根据蜗杆传动的实际工况,通过分析蜗轮齿面上的受力情况,计算出蜗轮齿面上的载荷分布。
详细描述
在进行蜗轮齿面载荷分布计算时,需要考虑蜗杆传动的实际工况,如传动比、转速、载荷大小和方向 等因素。通过分析蜗轮齿面上的受力情况,可以确定蜗轮齿面上的载荷分布,为后续的设计计算提供 基础。
蜗轮蜗杆设计计算
• 蜗轮蜗杆简介 • 蜗轮蜗杆设计参数 • 蜗轮蜗杆材料选择 • 蜗轮蜗杆设计计算方法 • 蜗轮蜗杆设计实例分析
01
蜗轮蜗杆简介
蜗轮蜗杆的定义
01
蜗轮蜗杆是一种常用的传动装置 ,由两个交错轴线、相互咬合的 齿轮组成,其中一个是蜗杆,另 一个是蜗轮。
02
蜗轮蜗杆具有传动比大、传动效 率高、传动平稳、噪音低等优点 ,因此在各种机械传动系统中得 到广泛应用。
VS
蜗轮蜗杆的计算

蜗轮蜗杆的计算公司标准化编码 [QQX96QT-XQQB89Q8-NQQJ6Q8-MQM9N]蜗轮、蜗杆的计算公式:1,传动比=蜗轮齿数÷蜗杆头数2,中心距=(蜗轮节径+蜗杆节径)÷2 3,蜗轮吼径=(齿数+2)×模数 4,蜗轮节径=模数×齿数5,蜗杆节径=蜗杆外径-2×模数 6,蜗杆导程=π×模数×头数7,螺旋角(导程角)tg β=(模数×头数)÷蜗杆节径 一.基本参数:(1)模数m 和压力角α:在中间平面中,为保证蜗杆蜗轮传动的正确啮合,蜗杆的轴向模数m a1和压力角αa1应分别相等于蜗轮的法面模数m t2和压力角αt2,即 m a1=m t2=m αa1=αt2蜗杆轴向压力角与法向压力角的关系为: tgαa =tgαn /cosγ 式中:γ-导程角。
(2)蜗杆的分度圆直径d 1和直径系数q为了保证蜗杆与蜗轮的正确啮合,要用与蜗杆尺寸相同的蜗杆滚刀来加工蜗轮。
由于相同的模数,可以有许多不同的蜗杆直径,这样就造成要配备很多的蜗轮滚刀,以适应不同的蜗杆直径。
显然,这样很不经济。
为了减少蜗轮滚刀的个数和便于滚刀的标准化,就对每一标准的模数规定了一定数量的蜗杆分度圆直径d1,而把及分度圆直径和模数的比称为蜗杆直径系数q ,即: q=d1/m常用的标准模数m 和蜗杆分度圆直径d1及直径系数q ,见匹配表。
(3)蜗杆头数z 1和蜗轮齿数z 2蜗杆头数可根据要求的传动比和效率来选择,一般取z1=1-10,推荐 z1=1,2,4,6。
选择的原则是:当要求传动比较大,或要求传递大的转矩时,则z1取小值;要求传动自锁时取z1=1;要求具有高的传动效率,或高速传动时,则z1取较大值。
蜗轮齿数的多少,影响运转的平稳性,并受到两个限制:最少齿数应避免发生根切与干涉,理论上应使z2min≥17,但z2<26时,啮合区显着减小,影响平稳性,而在z2≥30时,则可始终保持有两对齿以上啮合,因之通常规定z2>28。
蜗轮蜗杆的计算
蜗轮、蜗杆的计算公式: 1,传动比=蜗轮齿数÷蜗杆头数 2,中心距=(蜗轮节径+蜗杆节径)÷2 3,蜗轮吼径=(齿数+2)×模数 4,蜗轮节径=模数×齿数 5,蜗杆节径=蜗杆外径-2×模数 6,蜗杆导程=π×模数×头数7,螺旋角(导程角)tg β=(模数×头数)÷蜗杆节径 一.基本参数:(1)模数m 和压力角α:在中间平面中,为保证蜗杆蜗轮传动的正确啮合,蜗杆的轴向模数m a1和压力角αa1应分别相等于蜗轮的法面模数m t2和压力角αt2,即 m a1=m t2=m αa1=αt2蜗杆轴向压力角与法向压力角的关系为: tgαa =tgαn /cosγ 式中:γ-导程角。
(2)蜗杆的分度圆直径d 1和直径系数q为了保证蜗杆与蜗轮的正确啮合,要用与蜗杆尺寸相同的蜗杆滚刀来加工蜗轮。
由于相同的模数,可以有许多不同的蜗杆直径,这样就造成要配备很多的蜗轮滚刀,以适应不同的蜗杆直径。
显然,这样很不经济。
为了减少蜗轮滚刀的个数和便于滚刀的标准化,就对每一标准的模数规定了一定数量的蜗杆分度圆直径d1,而把及分度圆直径和模数的比称为蜗杆直径系数q,即:q=d1/m常用的标准模数m和蜗杆分度圆直径d1及直径系数q,见匹配表。
(3)蜗杆头数z1和蜗轮齿数z2蜗杆头数可根据要求的传动比和效率来选择,一般取z1=1-10,推荐 z1=1,2,4,6。
选择的原则是:当要求传动比较大,或要求传递大的转矩时,则z1取小值;要求传动自锁时取z1=1;要求具有高的传动效率,或高速传动时,则z1取较大值。
蜗轮齿数的多少,影响运转的平稳性,并受到两个限制:最少齿数应避免发生根切与干涉,理论上应使z2min≥17,但z2<26时,啮合区显着减小,影响平稳性,而在z2≥30时,则可始终保持有两对齿以上啮合,因之通常规定z2>28。
另一方面z2也不能过多,当z2>80时(对于动力传动),蜗轮直径将增大过多,在结构上相应就须增大蜗杆两支承点间的跨距,影响蜗杆轴的刚度和啮合精度;对一定直径的蜗轮,如z2取得过多,模数m 就减小甚多,将影响轮齿的弯曲强度;故对于动力传动,常用的范围为z2≈28-70。
蜗轮蜗杆计算
蜗轮蜗杆计算蜗杆传动当两根轴在90度相交,但它们既不平行也不相交时,采用蜗轮传动。
在蜗轮传动中,蜗杆是主动部件,蜗轮是被动部件。
蜗轮传动具有以下特点:1)结构紧凑,可获得较大的传动比,一般传动比为7-80。
2)运行稳定,无噪声3)传输功率范围大4)自锁5)传动效率低,蜗轮蜗杆往往由有色金属制成。
蜗杆的螺杆可分为单头螺杆和多头螺杆。
传动比计算公式如下:I = N1 / N2 = Z / KN1为蜗杆转速,N2为蜗轮转速,K为蜗杆头数,Z为蜗轮齿数蜗轮蜗杆机构1、目的:蜗轮蜗杆机构通常用于在两根交错轴之间传递运动和动力。
蜗轮和蜗杆相当于中间平面上的齿轮和齿条,蜗杆和螺杆的形状相似。
\ 二、基本参数:模数m、压力角、蜗杆直径系数q、导程角、蜗杆头数、蜗轮齿数、齿顶高系数(取1)及顶隙系数(取0.2)。
其中,模数m和压力角是指蜗杆轴面的模数和压力角,亦即蜗轮轴面的模数和压力角,且均为标准值;蜗杆直径系数q为蜗杆分度圆直径与其模数m的比值,三、蜗轮蜗杆正确啮合的条件1 中间平面内蜗杆与蜗轮的模数和压力角分别相等,即蜗轮的端面模数等於蜗杆的轴面模数且为标准值;蜗轮的端面压力角应等於蜗杆的轴面压力角且为标准值,即m2 当蜗轮蜗杆的交错角为时,还需保证,而且蜗轮与蜗杆螺旋线旋向必须相同。
四、几何尺寸计算与圆柱齿轮基本相同,需注意的几个问题是:蜗杆导程角()是蜗杆分度圆柱上螺旋线的切线与蜗杆端面之间的夹角,与螺杆螺旋角的关系为,蜗轮的螺旋角,大则传动效率高,当小於啮合齿间当量摩擦角时,机构自锁。
引入蜗杆直径系数q是为了限制蜗轮滚刀的数目,使蜗杆分度圆直径进行了标准化m一定时,q大则大,蜗杆轴的刚度及强度相应增大;一定时,q小则导程角增大,传动效率相应提高。
蜗杆头数推荐值为1、2、4、6,当取小值时,其传动比大,且具有自锁性;当取大值时,传动效率高。
与圆柱齿轮传动不同,蜗杆蜗轮机构传动比不等於,而是,蜗杆蜗轮机构的中心距不等於,而是。
蜗轮蜗杆几何计算

3.180 3.180 20° 20.853 1.000 5.000 5.000 6.000 6.000 10.000 90.000
蜗轮分度圆直径 蜗杆节圆直径 蜗轮节圆直径 蜗杆齿顶圆直径 蜗轮齿顶圆直径
d2 d1′ d2′ da1 da2
d2=mz2=2a-d1-2x2m d1′=(q+2x2)m=d1+2x2m d2′=d2 da1=(q+2)m;da1=d1+2ha1=d1+2ham da2=(z2+2+2x2)m =d2+2*ha2 蜗轮喉径
da2max da2max=da2+2m
da2max=测量值: 新件、原件195
蜗轮缘宽度
b
b=(0.67~0.75)da1,z1大时取小值
75.000
b=测量值:新件、 原件65.7 rg2=测量值: 新件20 (原件40) 计算 备注
蜗轮咽喉母圆半径 蜗轮齿根圆半径 名称
rg2 rf2 代号
模数 传动比 蜗杆头数 涡轮齿数 蜗杆直径系数 蜗轮变位系数
m i z1 z2 q x2
m=2a/(q+z2+2x2) i=n1/n2=z2/z2 z1=1~4 z2=iz1 q=d1/m x2=a/m-(d1+d2)/2m
5.00 35.00 1 35 18.000 0.0000
设计取值 36 测量值 z1=1 测量值 z2=36 测量值 设计取值 设计取值 测量值: ∮110蜗杆孔至蜗 轮孔∮224 133.6 ∮110蜗杆孔至蜗 轮孔∮180小孔 132.7 3°10′47″ 3°10′47″ 20°51′10″
rg2=a-0.5da2 rf2=0.5da1+0.2m 公式
蜗轮蜗杆滑动速度计算
蜗轮蜗杆滑动速度计算
蜗轮蜗杆传动是机械行业中局限传动比较大的传动方法之一,利
用其传动特点可以实现高扭矩、低速的运动。
在蜗轮蜗杆传动中,滑动速度的计算方法如下:
首先,假设蜗杆的转速为n1,蜗轮的转速为n2,蜗杆的导程角
为α,蜗轮的齿数为Z2。
则蜗轮的滑动速度V2可通过以下式子求得:V2 = π × d2 × (n1/n2) × cosα
其中,d2为蜗轮的分圆直径。
通过这个式子,我们可以得知,在蜗轮蜗杆传动中,当蜗杆的转
速n1越大,蜗轮的滑动速度V2也越大;反之,当蜗轮的齿数Z2越大,则蜗轮的滑动速度V2越小。
通过以上计算公式,我们可以得出蜗轮蜗杆滑动速度的计算结果,供机械设计工程师们参考使用。
蜗轮蜗杆参数计算公式
蜗轮蜗杆参数计算公式
1、蜗轮蜗杆组合传动具有较高的传动比,可以较容易地达到比较小的大小及较高的速比,并且一般的传动比更高的机构与所需的齿形和齿形尺寸都较小,而且可以具有更高的效率。
2、由于蜗轮之间的位置及角度的变化可以改变传动比,因而非常适合用于变比传动机构,同时由于蜗轮蜗杆机构的结构较简单,其装配和维护也比较容易。
3、蜗轮蜗杆组合传动在拧紧螺钉时可以产生一定的高度,因而不需要设计及购买较多的辅助部件即可完成较高的传动比及较高的
精确度。
二、蜗轮蜗杆参数计算公式:
蜗轮蜗杆传动比N=m1/m2
其中m1代表蜗轮齿数,m2代表蜗杆齿数。
设计蜗轮蜗杆时,要考虑传动比和两轮基圆d1和d2之间的关系: d1/d2 = ( m2+2 )/m1
其中,d1代表蜗轮基圆的直径,d2代表蜗杆基圆的直径。
计算蜗轮蜗杆齿数:
m1 = ( m2+2 ) / (d1/d2)
m2 = (d1/d2) * (m1-2)
其中,m1代表蜗轮齿数,m2代表蜗杆齿数,d1代表蜗轮基圆的直径,d2代表蜗杆基圆的直径。
- 1 -。
蜗轮蜗杆的设计计算
蜗轮蜗杆的设计计算1、根据GB/10085-1988推荐采用渐开线蜗杆(ZI )。
2、根据传动功率不大,速度中等,蜗杆45钢,因为希望效率高些,耐磨性好,故蜗杆螺旋 齿面要求淬火,硬度45-55HRC ,蜗轮用铸锡磷青铜ZCuSn10P1金属铸造,为节约贵重金的有色金属。
仅齿圈用青铜制造,而轮芯用灰铸铁HT100铸造。
3、按持卖你接触疲劳强度进行设计a ≥32H 2])][(σP E z z KT (1)作用在蜗轮上的转矩2T按1Z =2 ,η=0.8 2T =9.55⨯610⨯2p /2n =9.55⨯610⨯0.7⨯0.8/62=86258mm ⋅N(2)确定载荷系数K ,取A K =1.15 βK =1 v K =1.05所以得K= A K ⨯ βK ⨯v K =1.15⨯1⨯1.05=1.21(3)确定弹性影响系数E Z =16021MPa (铸锡青铜蜗轮与钢蜗杆相配)(4)确定接触系数p Z假设ad 1=0.35 从表11-18查得p Z =2.9 (5)确定接触应力[H σ]根据材料ZCuSn10P1,蜗杆螺旋齿面硬度>45HRC ,从表11-7查得蜗轮许用应力'][H σ=268MPaN=60j 2n h L =60⨯1⨯62⨯46720=1.74⨯810寿命系数HN K =8871074.110⨯=067则 [H σ] =HN K ⨯'][H σ=0.67⨯268=179.56MPa (6)计算中心距 a ≥32])56.1799.2160(8625821.1⨯⨯⨯ =88.6 取a=100.因为i-15 故从表11-15中取模数m=5 1d =50mm 这时a d 1=10050=0.5 从图11-18,可查的接触系数'Z ρ=2.6<2.9,所以计算结果可用。
4、蜗杆蜗轮的主要参数(1)蜗杆:轴向齿距Pa=15.7得直径系数q=10 齿顶园直径a1d =60,齿根圆f1d =38,分度圆导角r=11 18 36 ,蜗杆轴向齿厚Sa=5π/2=7.85mm(2)蜗轮齿数2Z =31 变位系数2x =-0.500 验算传动比i=2Z /1Z =31/2=15.5 误差为15155.15-=3.33%,在允许范围内,所以可行。
环面蜗轮蜗杆强度计算

环面蜗轮蜗杆强度计算
在机械工程中,蜗轮蜗杆强度的计算涉及到多个因素,包括蜗杆的模数、蜗杆头数、蜗轮齿数、蜗杆轴向压力角等。
以下是一个基本的蜗轮蜗杆强度计算过程:
选择蜗杆材料和热处理方式:蜗杆常用的材料有锡青铜、黄铜等,热处理方式则根据使用需求选择。
确定基本参数:确定模数、蜗杆头数、蜗轮齿数、蜗杆轴向压力角等基本参数。
计算蜗杆轴向力:根据工作需求和设计要求,计算蜗杆的轴向力。
计算蜗轮齿面接触强度:根据公式:
(H_b = \frac{9000 \times T}{n \times d_{1}})
其中,(H_b)是齿面接触强度,(T)是传递的扭矩,(n)是转速,(d_{1)是蜗杆分度圆直径。
计算蜗轮齿根弯曲强度:根据公式:
(F_b = \frac{9000 \times T}{n \times d_{2}})
其中,(F_b)是齿根弯曲强度,(d_{2})是蜗轮分度圆直径。
校核:将计算出的齿面接触强度和齿根弯曲强度与许用值进行比较,确保安全系数大于1。
优化设计:根据校核结果,对设计进行优化,如调整模数、蜗杆头数等参数。
完成设计:完成蜗轮蜗杆的设计,并考虑实际制造和装配的可行
性。
请注意,以上仅为一个简化的计算过程,实际应用中可能还需要考虑更多的因素,如温度、湿度、润滑条件等。
在具体设计时,建议参考相关设计规范和标准,并使用专业的设计软件进行辅助设计。
蜗轮蜗杆的传动比计算公式
蜗轮蜗杆的传动比计算公式蜗轮蜗杆是一种常见的传动装置,它能够实现大功率的传递和变速。
在设计和应用中,需要计算蜗轮蜗杆的传动比,这样才能确定驱动装置和被驱动装置之间的速度关系。
蜗轮蜗杆的传动比计算公式为:
传动比=蜗轮轴的周长÷蜗杆轴的周长
其中,蜗轮轴的周长指的是蜗轮每个齿的周长之和,而蜗杆轴的周长则是蜗杆每个螺旋线的周长之和。
这两个参数的计算需要根据具体的设计和制造要求进行。
通过计算传动比,可以有效地控制蜗轮蜗杆的转速和扭矩,以满足不同的工作需求。
同时,还可以利用传动比计算出驱动装置和被驱动装置之间的速比,从而实现更精准的传动控制。
蜗轮蜗杆计算

蜗轮蜗杆计算:
蜗轮、蜗杆的计算公式:1,传动比=蜗轮齿数÷蜗杆头数
2,中心距=(蜗轮节径+蜗杆节径)÷2
3,蜗轮吼径=(齿数+2)×模数
4,蜗轮节径=模数×齿数
5,蜗杆节径=蜗杆外径-2×模数
6,蜗杆导程=π×模数×头数
7,螺旋角(导程角)tgB=(模数×头数)÷蜗杆节径
蜗轮、蜗杆的计算公式:
1,传动比=蜗轮齿数÷蜗杆头数
2,中心距=(蜗轮节径+蜗杆节径)÷2
3,蜗轮吼径=(齿数+2)×模数
4,蜗轮节径=模数×齿数
5,蜗杆节径=蜗杆外径-2×模数
6,蜗杆导程=π×模数×头数
7,螺旋角(导程角)tgB=(模数×头数)÷蜗杆节径
基本参数:
蜗轮蜗杆的模数m、压力角、蜗杆直径系数q、导程角、蜗杆头数、蜗轮齿数、齿顶高系数(取1)及顶隙系数(取0.2)。
其中,模数m和压力角是指蜗杆轴面的模数和压力角,亦即蜗轮端面的模数和压力角,且均为标准值;蜗杆直径系数q为蜗杆分度圆直径与其模数m的比值。
蜗轮蜗杆正确啮合的条件:
中间平面内蜗杆与蜗轮的模数和压力角分别相等,即蜗轮的端面模数等于蜗杆的轴面模数且为标准值;蜗轮的端面压力角应等于蜗杆的轴面压力角且为标准值,即==m。
当蜗轮蜗杆的交错角为时,还需保证,而且蜗轮与蜗杆螺旋线旋向必须相同。
蜗轮蜗杆参数计算
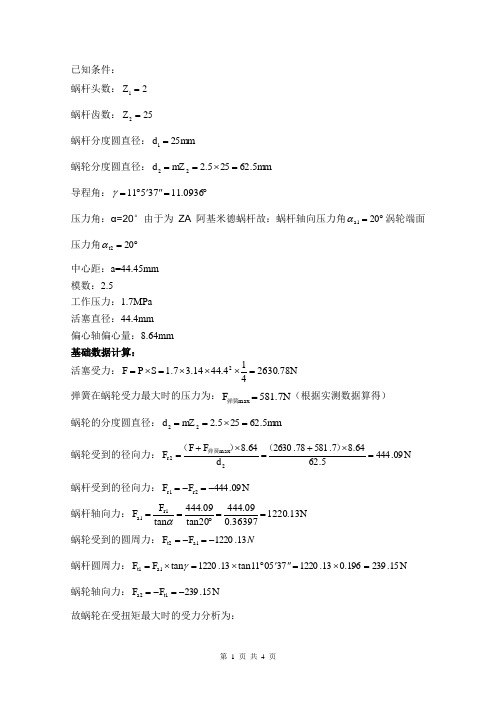
已知条件:蜗杆头数:2Z 1=蜗杆齿数:25Z 2=蜗杆分度圆直径:m m 25d 1=蜗轮分度圆直径:m m 5.62255.2m Z d 22=⨯==导程角:︒="'︒=0936.1137511γ压力角:α=20°由于为ZA 阿基米德蜗杆故:蜗杆轴向压力角︒=20a1α涡轮端面压力角︒=20t2α中心距:a=44.45mm模数:2.5工作压力:1.7MPa活塞直径:44.4mm偏心轴偏心量:8.64mm基础数据计算: 活塞受力:N 78.2630414.4414.31.7S P F 2=⨯⨯⨯=⨯= 弹簧在蜗轮受力最大时的压力为:581.7N F max =弹簧(根据实测数据算得)蜗轮的分度圆直径:m m 5.62255.2m Z d 22=⨯== 蜗轮受到的径向力:N 09.4445.6264.87.58178.2630d 64.8F F F 2max 2r =⨯+=⨯+=)()(弹簧 蜗杆受到的径向力:N 09.444F F r2r1-=-= 蜗杆轴向力:N 13.122036397.009.444tan2009.444tan F F r1a1==︒==α 蜗轮受到的圆周力:N 13.1220F F a1t2-=-=蜗杆圆周力:N 15.239196.013.12203705tan1113.1220tan F F a1t1=⨯="'︒⨯=⨯=γ 蜗轮轴向力:N 15.239F F t1a2-=-=故蜗轮在受扭矩最大时的受力分析为:径向力为:N 79.10257.58109.444F F F max 2r max 2r =+=+=弹簧 蜗轮受到的扭矩:mm N d ⋅=⨯⨯=⨯⨯=94.320555.05.6238.94521F T 2r2max 2 滑动速度m /s 03.23705cos1110006015004.2514.3cos 100060n d cos v v 111s ="'︒⨯⨯⨯⨯=⨯⨯==γπγ 蜗杆传动的效率:8693.0002370511tan 3705tan1195.0tan tan 95.0v 321='︒+"'︒"'︒=+=⋅⋅=)()(ϕγγηηηη 由于轴承摩擦及溅油这两项功率损耗不大,一般取96.095.032-=⋅ηη,取0.95 v ϕ——根据机械设计P264表11-18选取其值为2°00′ 蜗杆受到的扭矩:m m N 05.29508693.05.1294.32055i T T 21⋅=⨯=⋅=η 蜗轮齿面接触疲劳强度计算: 接触应力:MPa 32.0101045.4494.320551.231.2160a KT Z Z 66332E H =⨯⨯⨯⨯==-ρσ E Z ——由于为锡青铜与钢蜗杆配对,取21EMPa 160Z = ρZ ——根据机械设计P253图11-18查得ρZ =2.31K ——1.20.14.15.1K K K K V A =⨯⨯==βA K :根据机械设计P253表11-5查得A K =1.15βK :依据机械设计P253,工作不平稳有冲击和振动取βK =1.4 V K :依据机械设计P253,取V K =1.0根据机械设计P253表11-6查得许用接触应力210MPa ][H =σ实际值远远小于许用应力。
蜗轮蜗杆的计算

蜗轮、蜗杆的计算公式:1,传动比=蜗轮齿数÷蜗杆头数2,中心距=(蜗轮节径+蜗杆节径)÷ 2 3,蜗轮吼径=(齿数+2)×模数4,蜗轮节径=模数×齿数5,蜗杆节径=蜗杆外径-2×模数6,蜗杆导程=π×模数×头数为了减少蜗轮滚刀的个数和便于滚刀的标准化,就对每一标准的模数规定了一定数量的蜗杆分度圆直径d1,而把及分度圆直径和模数的比称为蜗杆直径系数q,即:q=d1/m常用的标准模数m和蜗杆分度圆直径d1及直径系数q,见匹配表。
(3)蜗杆头数z1和蜗轮齿数z2蜗杆头数可根据要求的传动比和效率来选择,一般取z1=1-10,推荐z1=1,2,4,6。
选择的原则是:当要求传动比较大,或要求传递大的转矩时,则z1取小值;要求传动自锁时取z1=1;要求具有高的传动效率,或高速传动时,则z1取较大值。
蜗轮齿数的多少,影响运转的平稳性,并受到两个限制:最少齿数应避免发生根切与干涉,理论上应使z2min≥17,但z2<26时,啮合区显着减小,影响平稳性,而在z2≥30时,则可始终保持有两对齿以上啮合,因之通常规定z2>28。
另一方面z2也不能过多,当z2>80时(对于动力传动),蜗轮直径将增大过多,在结构上相应就须增大蜗杆两支承点间的跨距,影响蜗杆轴的刚度和啮合精度;对一定直径的蜗轮,如z2取得过多,模数m就减小甚多,将影响轮齿的弯曲强度;故对于动i=n1/n2=z2/z1 =u式中:n1 -蜗杆转速;n2-蜗轮转速。
减速运动的动力蜗杆传动,通常取5≤u≤70,优先采用15≤u≤50;增速传动5≤u≤15。
普通圆柱蜗杆基本尺寸和参数及其与蜗轮参数的匹配表。
2 蜗杆传动变位的特点蜗杆传动变位变位蜗杆传动根据使用场合的不同,可在下述两种变位方式中选取一种。
1)变位前后,蜗轮的齿数不变(z2 '=z2),蜗杆传动的中心距改变(a '≠a),如图9-8a、c所示,其中心距的计算式如下:a '=a+x2m=(d1+d2+2x2m)/22)变位前后,蜗杆传动的中心距不变(a '=a),蜗轮齿数发生变化(z2'≠z2),如图9-8d、e所示,z2' 计算如下:因a'=a则z2' =z2-2x2蜗杆传动变位:3 普通圆柱蜗杆传动的几何尺寸计算普通圆柱蜗杆传动基本几何尺寸计算关系式:。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
模数m、压力角、蜗杆直径系数q、导程角、蜗杆头数、蜗轮齿数、齿顶高系数(取1)及顶隙系数(取0.2)。
其中,模数m和压力角是指蜗杆轴面的模数和压力角,亦即涡轮端面的模数和压力角,且均为标准值;蜗杆直径系数q为蜗杆分度圆直径与其模数m的比值。
分类和条件
折叠分类
蜗轮蜗杆大致有这些系列:
1、WH系列蜗轮蜗杆减速机:WHT/WHX/WHS/WHC
2、CW系列蜗轮蜗杆减速机:CWU/CWS/CWO
3、WP系列蜗轮蜗杆减速
机:WPA/WPS/WPW/WPE/WPZ/WPD
4、TP系列包络蜗轮蜗杆减速机:TPU/TPS/TPA/TPG
5、PW型平面二次包络环面蜗杆减速机
另外,根据蜗杆形状的不同,蜗杆传动可以分为圆柱蜗杆传动、环面蜗杆传动和锥蜗杆传动。
折叠正确啮合的条件
1.蜗轮的端面模数等于蜗杆的轴面模数且为标准值,蜗轮的端面压力角应等于蜗杆的轴面压力角且为标准值,即m(杆)==m(轮) ,α(杆)==α(轮)。
2.当蜗轮蜗杆的交错角为90°时,还需保证,而且蜗轮与蜗杆螺旋
蜗轮蜗杆线旋向必须相同。
几何尺寸计算与圆柱齿轮基本相同,需注意的几个问题
1.蜗杆导程角γ是蜗杆分度圆柱上螺旋线的切线与蜗杆端面之间的夹角,与螺杆螺旋角的关系为,蜗轮的螺旋角,大则传动效率高,当小于啮合齿间当量摩擦角时(ψv= arctan fv ,即当量摩擦角等于摩擦因素的反正切值,当ψv小于γ时),机构自锁。
2.引入蜗杆直径系数q是为了限制蜗轮滚刀的数目,使蜗杆分度圆直径进行了标准化m一定时,q大则大,蜗杆轴的刚度及强度相应增大;一定时,q小则导程角增大,传动效率相应提高。
3.蜗杆头数推荐值为1、2、4、6,当取小值时,其传动比大,且具有自锁性;当取大值时,传动效率高。
与圆柱齿轮传动不同,蜗杆蜗轮机构传动比不等于蜗杆直径与蜗轮直径的比值。
4.蜗杆蜗轮传动中蜗轮转向的判定方法,可根据啮合点K处方向、方向(平行于螺旋线的切线)及应垂直于蜗轮轴线画速度矢量三角形
来判定;也可用"右旋蜗杆左手握,左旋蜗杆右手握,四指拇指"来判定。
特点应用和常见问题与解决方法
折叠机构的特点
1.可以得到很大的传动比,比交错轴斜齿轮机构紧凑。
2.两轮啮合齿面间为线接触,其承载能力大大高于交错轴斜齿轮机构。
3.蜗杆传动相当于螺旋传动,为多齿啮合传动,故传动平稳、噪音很小。
4.具有自锁性。
当蜗杆的导程角小于啮合轮齿间的当量摩擦角时,机构具有自锁性,可实现反向自锁,即只能由蜗杆带动蜗轮,而不能由蜗轮带动蜗杆。
如在起重机械中使用的自锁蜗杆机构,其反向自锁性可起安全保护作用。
5.传动效率较低,磨损较严重。
蜗轮蜗杆啮合传动时,啮合轮齿间的相对滑动速度大,故摩擦损耗大、效率低。
另一方面,相对滑动速度大使齿面磨损严重、发热严重,为了散热和减小磨损,常采用价
格较为昂贵的减摩性与抗磨性较好的材料及良好的润滑装置,因而成本较高。
6.蜗杆轴向力较大。