导航学(第二章)
2024年人教版七年级地理上册第二章 地图地图的选择和应用

地图的选择和应用
设计说明
本节课和日常生活联系密切,因此要从学生熟悉的地理事件入手,选择和生活相关的热点事件和手机导航等问题,注重学生的参与度,提高学生的学习兴趣,让学生在参与中学习,在快乐中学习。
学习目标
1.根据需求选择适用的地图,查找所需要的地理信息,养成使用地图的习惯。
2.结合生活实例,描述数字地图和卫星导航系统给人们生活带来的便捷。
3.结合实例,描述数字地图在城市管理、资源调查、灾害监测等方面的应用。
重点难点
重点:能够选择合适的地图。
难点:理解电子地图在生产、生活方面的应用。
教学方法
合作探究法、概括归纳法等。
教学过程
一、预习检查
完成《七彩作业》知识梳理部分的内容。
二、学习任务一
教学模块
三、学习任务二教学模块
四、过程性评价
随堂练习
五、课堂小结
本节课我们了解了地图的选择和数字地图的作用,知道了要根据使用目的的不同选择不同类型和不同比例尺的地图,借助数字地图可以方便生活,有利于城市管理、资源调查和灾害监测等,因此地图和我们生活密切相关。
六、布置作业
建议所有同学完成本节《七彩作业》的【基础通关】和【能力突破】,有能力的同学可以同时完成【素养达标】和【考点专练】。
七、板书设计
教学反思。
导航学5-2-2012
N
飞机 纵轴 延长线
相对 方位
观测线
飞机到地面导航台的相对方位
1 自动测向器(ADF)(2)
❖系统的工作频率在150kHz~1800kHz范围 内,属中长波波段,因此主要依靠地波或 直达波传播。
❖地波的传播距离可以达到几百公里,但易 受到天波的污染,特别在夜间。只有当飞 机离地面导航台站较近时,方位读数才比 较可靠,测向精度可达2°左右。
❖1949年,ILS被ICAO定为飞机标准近进和 着陆设备。
3 仪表着陆系统(ILS)(3)
❖决断高度(DH)是指驾驶员对飞机着陆 或复飞做出判断的最低高度。在决断高度 上,驾驶员必须看见跑道才能着陆,否则 放弃着陆,进行复飞。
❖ICAO根据飞机在不同气象条件下的着陆 能力,规定3类着陆标准,使用跑道视距 和决断高度来表示。
利用两个地面导航台为飞机定位
判断飞机飞越导航台的时间
1 自动测向器(ADF)(5)
▪ 判断飞机飞越导航台的时间:当飞机飞向导 航台时,根据相对方位角的变化来判断飞越 导航台的时间。如方位指示由0 °转向180 ° 的瞬间即为飞越导航台的时间;
▪ 利用方位指示保持沿预定航路飞行,即向/背 台飞行;
A
•
•
•
T
•
DVOR
•
C
• •
•
T/F G 无指示
T
T or F?
3 仪表着陆系统(ILS)(1)
❖ILS(Instrument Landing System)是在机 场终端区引导飞机精密进近着陆的着陆引 导设备,基于振幅比较测向原理。ILS提 供的引导信号,使飞机沿跑道中心线的垂 直面和规定的下滑角,从450m高空引导到 跑道入口水平面以上的决断高度( Decision Height),然后由驾驶员看着跑 道操纵飞机目视着陆。
小学心理健康《让目标导航学习》(教学设计)

小学心理健康《让目标导航学习》(教学设计)目标导航学习是一种对学生进行目标设定和规划的教育方式,旨在培养学生的自我管理能力和学习动力,使其能够积极、高效地学习。
在小学心理健康教育中,通过开展《让目标导航学习》的教学设计,可以帮助孩子们学会设定目标、制定计划,并培养他们的学习意愿和自我管理能力。
一、教学目标:1.了解目标导航学习的概念和作用;2.学会设定明确的学习目标;3.学会制定可行的学习计划;4.培养学生的学习动力和自我管理能力。
二、教学准备:1.课件和教学素材:PPT、学习目标和计划模板等;2.学生笔记本和学习用具。
三、教学过程:步骤一:导入(5分钟)引导学生回顾上一节课学习的内容,即提问他们是否记得目标导航学习是什么,以及为什么要学习这个主题。
通过回答问题和讨论,激发学生对目标导航学习的兴趣和认识。
步骤二:概念讲解(10分钟)通过PPT等教学素材,简要讲解目标导航学习的概念和作用。
解释目标导航学习是一种通过设定目标和制定计划来指导学习的方法,它可以帮助学生更好地掌握学习内容,提高学习效果。
同时,强调目标导航学习对于个人成长和发展的重要性。
步骤三:目标设定(20分钟)1.向学生介绍目标的特点,包括明确、具体、可测量和可达成性。
鼓励学生思考并列举一些学习目标的例子。
2.分发学习目标和计划模板给学生,并展示一个示范模板。
引导学生填写自己的学习目标,例如:提高数学成绩、学习一首钢琴曲等。
要求学生书写目标时要尽量明确和具体。
3.组织学生分组,相互交流与比较目标,并互相提出改进建议。
鼓励学生讨论如何设定更具体和可达成的学习目标。
步骤四:学习计划制定(20分钟)1.向学生介绍学习计划的重要性,并解释计划的制定需要考虑时间、资源和步骤等因素。
2.鼓励学生根据自己的学习目标制定学习计划。
引导学生思考如何将学习目标分解为具体的步骤,并合理安排学习时间和资源。
3.学生根据自己的学习目标和计划,利用学习目标和计划模板进行填写。
导航学5-3-2012(new)

v f zs
p( i u
i
,v
i
)
O
i
w
i
xs
Os 透镜
ys 光轴 第i颗星
p
ui
u
(u
i
,0 )
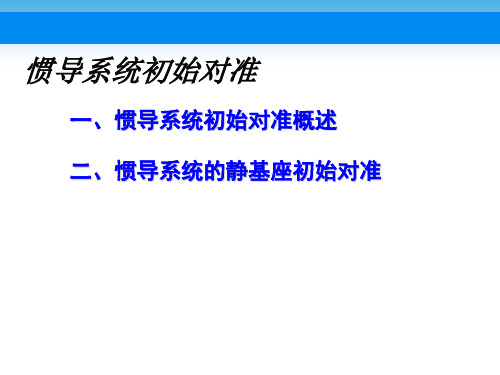
星敏感器测姿原理
Osxsyszs — 星敏感器坐标系 Ouvw — CCD成像面坐标系 OsO之间距离 f 为光学透镜的焦距 由图中的几何关系可得:
ui tan i f vi tan i f / cos i
t13 t23 t33
星敏感器测姿原理
上式各矩阵赋予命名,对应关系式:S = CTis 当观测星数 n 等于3颗时,星历矩阵C3×3为非奇异矩阵 ,那么转移矩阵Tis = C-1S n > 3时,可以采用最小二乘法得到计算式: Tis = (CTC)-1CTS 因为Tis = TibTbs,则姿态矩阵 Tib = Tis(Tbs)-1,这里 Tbs 为星敏感器在飞行器上的常量安装矩阵,求得姿态矩阵 Tib
它的精确建模是影响 天文导航系统性能的 一项重要因素。
• 研究航天器在无控运动下的重力场和其他摄动 力作用下的质点动力学问题。 • 包括二体问题、多体问题和轨道摄动等内容
航天器二体轨道 二体问题 二体轨道
• 卫星轨道分析,假定卫星在地球中心引力场中运动,忽 略其他各种摄动力因素,这种卫星轨道称为二体轨道。
z
S0
5.3.1 天文观测量和量测方程
5 以两个近天体之间的夹角为量测量
两个近天体之间的夹角,就是从 航天器上观测到的两个近天体的 视线方向之间的夹角A,由几何知 识可知,这时的位置面是以两个 近天体连线为轴线,旋转通过这 两点的一段圆弧而获得的超环面 圆弧的中心O位于两天体连线的 垂直平分线上 ,圆弧半径R与两 个近天体之间的距离以及A之间 的关系: r
高中数学第二章函数2.2一次函数和二次函数学习导航学案新人教B版必修1
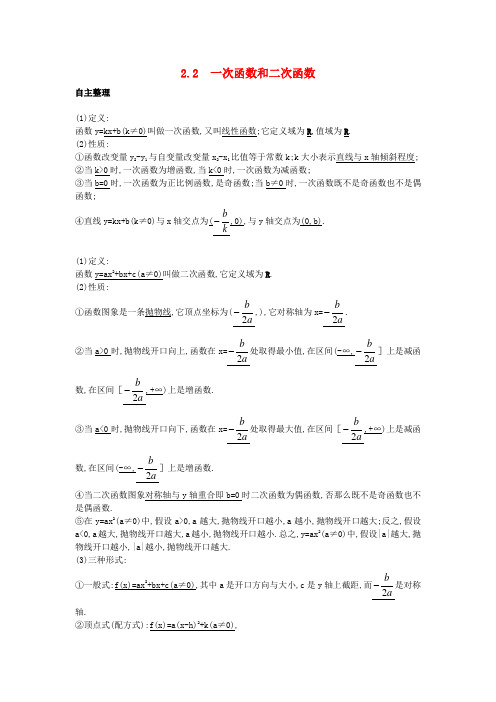
2.2 一次函数和二次函数自主整理(1)定义:函数y=kx+b(k≠0)叫做一次函数,又叫线性函数;它定义域为R ,值域为R .(2)性质:①函数改变量y 2-y 1与自变量改变量x 2-x 1比值等于常数k;k 大小表示直线与x 轴倾斜程度; ②当k>0时,一次函数为增函数,当k<0时,一次函数为减函数;③当b=0时,一次函数为正比例函数,是奇函数;当b≠0时,一次函数既不是奇函数也不是偶函数;④直线y=kx+b(k≠0)与x 轴交点为(kb -,0),与y 轴交点为(0,b).(1)定义:函数y=ax 2+bx+c(a≠0)叫做二次函数,它定义域为R .(2)性质:①函数图象是一条抛物线,它顶点坐标为(a b 2-,),它对称轴为x=ab 2-. ②当a>0时,抛物线开口向上,函数在x=a b 2-处取得最小值,在区间(-∞,a b 2-]上是减函数,在区间[ab 2-,+∞)上是增函数. ③当a<0时,抛物线开口向下,函数在x=a b 2-处取得最大值,在区间[a b 2-,+∞)上是减函数,在区间(-∞,ab 2-]上是增函数. ④当二次函数图象对称轴与y 轴重合即b=0时二次函数为偶函数,否那么既不是奇函数也不是偶函数.⑤在y=ax 2(a≠0)中,假设a>0,a 越大,抛物线开口越小,a 越小,抛物线开口越大;反之,假设a<0,a 越大,抛物线开口越大,a 越小,抛物线开口越小.总之,y=ax 2(a≠0)中,假设|a|越大,抛物线开口越小,|a|越小,抛物线开口越大.(3)三种形式:①一般式:f(x)=ax 2+bx+c(a≠0),其中a 是开口方向与大小,c 是y 轴上截距,而a b 2-是对称轴.②顶点式(配方式):f(x)=a(x-h)2+k(a≠0),其中(h,k)是抛物线顶点坐标.h=ab 2 ,k=. ③两根式(因式分解):f(x)=a(x-x 1)(x-x 2)(a≠0),其中x 1、x 2是抛物线与x 轴两个交点横坐标.如果知道一个函数一般形式,可先把所求函数写为一般形式,其中系数待定,然后再根据题设条件求出这些待定系数,这种通过求待定系数来确定变量之间关系式方法称为待定系数法. 高手笔记1.常数函数是较为特殊函数,原因在于在函数解析式y=b 中没有出现自变量x.其实常数函数就是一个多对一映射.注意:当a=0时,函数y=ax 2=0是一个常数函数,其图象即为x 轴.2.式子x=a(a 是一固定常数)虽然含有x,但不能称其为函数,原因在于一个x 对应无穷多个y,不符合函数定义,应将其与y=b 区别开来.3.二次函数是重要根底函数,必须作为重点内容来掌握.应从解析式、定义域、值域、图象、单调性、奇偶性几个方面内容进展把握.4.解决二次函数问题一定要牢牢树立数形结合思想,通过对函数图象分析寻找解决问题思路和分类讨论依据.名师解惑1.如何认识与理解常数函数?剖析:要全面认识一个函数,主要从解析式、定义域、值域、单调性、奇偶性等五个方面来认识,对于常数函数:解析式:当k=0时,y=kx+b 就变成了y=b,这就是常数函数解析式,其中b 是某一固定常数.这个解析式特点在于没有出现自变量x,这也是许多同学对常数函数感到难于理解原因.定义域:自变量x 可以取任意实数.解析式中没有出现x,说明解析式对x 没有要求,可以取任意实数.值域:常数函数值域为{b}.常数函数只有一个函数值b,就是说不管自变量怎么取值,都对应同一个函数值b.图象:因为不管自变量x 取什么值都对应一个函数值b,所以函数图象是平行于x 轴水平直线(特殊情况是x 轴).单调性:因为函数值是固定常数b,没有增减变化,函数图象也是一条水平直线,没有起伏变化,所以常数函数在定义域上没有单调性.奇偶性:定义域为R ,并且f(-x)=f(x)=b,所以一定是偶函数.如果b=0那么既是奇函数又是偶函数.2.如何由函数y=x 2图象变化得到函数y=a·x 2(a≠0)图象?又如何由函数y=ax 2(a≠0)图象变化得到y=a(x+h)2+k(a≠0)图象?再如何由函数y=ax 2(a≠0)图象得到函数y=ax 2+bx+c(a≠0)图象?剖析:(1)二次函数y=a·x 2(a≠0)图象可由y=x 2图象各点纵坐标变为原来a 倍得到,而横坐标保持不变.(2)二次函数y=a(x+h)2+k(a≠0)可由y=ax 2(a≠0)图象向左(或向右)平移|h|个单位,再向上(或下)平移|k|个单位得到.(3)要得到二次函数y=ax 2+bx+c(a≠0)图象,先将其化为y=a(x+h)2+k(a≠0)形式,再通过y=ax 2(a≠0)图象上下左右平移得到.3.二次函数性质常见有哪些综合应用?剖析:(1)关于对称轴问题:假设二次函数f(x)满足f(t+x)=f(t-x),那么f(x)关于直线x=t对称,这一性质对于一般函数也适用.(2)关于二次函数在闭区间上最值问题:当a>0时,f(x)在区间[p,q ]上最大值为M,最小值为m,令x 0=21(p+q). 假设a b 2-<p,那么f(p)=m,f(q)=M; 假设p≤a b 2-<x 0,那么f(ab 2-)=m,f(q)=M; 假设x 0≤a b 2-<q,那么f(p)=M,f(ab 2-)=m; 假设a b 2-≥q,那么f(p)=M,f(q)=m. (3)关于二次方程f(x)=ax 2+bx+c=0实根分布问题:①方程f(x)=0两根中一根比r 大,另一根比r 小a·f(r)<0.②二次方程f(x)=0两根都大于r ⇔③二次方程f(x)=0在区间(p,q)内有两根⇔讲练互动【例题1】方程ax-by+c=0(ab≠0)所对应一次函数,当a 、b 满足什么条件时函数为减函数 分析:首先将直线方程化为一次函数y=kx+b 形式,然后根据k>0时函数为增函数,k<0时函数为减函数,进而求得a 、b 所满足条件,即ab<0. 解:把ax-by+c=0整理,得y=b a x+bc , 要使得一次函数为减函数,那么b a <0,即只要a 、b 异号就可以了. 绿色通道处理一次函数问题常把解析式整理成标准形式,然后再求解.变式训练1.直线mx+(m-2)y=3(m≠2,m≠0)所对应一次函数,当函数为增函数时m 满足条件是( )A.0<mB.m<2C.0<m<2解析:把mx+(m-2)y=3整理,得y=x+,要使得一次函数为增函数,那么>0,即只要-m 、m-2同号就可以了,所以易得0<m<2. 答案:C【例题2】二次函数f(x)=ax 2+(2a-1)x+1在区间[23-,2]上最大值为3,求实数a 值. 分析:这是一个逆向最值问题,假设从求最值入手,需分a>0与a<0两大类五种情形讨论,过程烦琐不堪.假设注意到f(x)最值总是在闭区间端点或抛物线顶点处取到,因此先计算这些点函数值,再检验其真假,过程简明.解:(1)令f()=3,得a=21-. 此时抛物线开口向下,对称轴为x=-2,且-2[23-,2],故a=21-不合题意. (2)令f(2)=3,得a=21,此时抛物线开口向上,对称轴为x=0,闭区间右端点2距离对称轴远些,故a=21符合题意. (3)假设f(23-)=3,得a=32-,此时抛物线开口向下,对称轴为x=47-,闭区间为单调减区间,所以a=-32符合题意. 综上,a=21或a=32-. 绿色通道此题利用特殊值检验法,先计算特殊点(闭区间端点、抛物线顶点)函数值,再检验其真假,思路明了、过程简洁,是解决逆向型闭区间二次函数最值问题一种有效方法.变式训练2.二次函数y=x 2+2ax-3,x∈[1,2],试求函数最小值.分析:首先观察到函数图象过(0,-3),再考虑对称轴位置,由于对称轴在不同位置会出现不同结果,所以需要分三种情况讨论.解:y=x 2+2ax-3=(x+a)2-a 2-3,当-a∈(2,+∞),即a<-2时,此时函数在[1,2]上为减函数,故此时最小值为f(2)=4a+1; 当-a∈(-∞,1),即a>-1时,函数最小值为f(1)=2a-2;当-a∈[1,2],即-2≤a≤-1时,函数最小值为f(-a)=-a 2-3.【例题3】二次函数图象过(0,1)、(2,4)、(3,10)三点,求这个二次函数解析式.分析:是二次函数,且知三个点坐标,所以可以先设出二次函数解析式,用待定系数法求得.解:根据题意设这个二次函数解析式为y=ax 2+bx+c(a≠0),然后将图象所经过三个点坐标分别带入方程,联立三个方程,得解得故f(x)=23x 223-x+1. 绿色通道使用待定系数法解题根本步骤是第一步,设出含有待定系数解析式;第二步,根据恒等条件,列出含待定系数方程或方程组;第三步,解方程或方程组解出待定系数,使问题得到解决.变式训练3.假设f(x)为一次函数,且满足f [f(x)]=1+2x,那么f(x)解析式为______.解析:f(x)为一次函数,可以使用待定系数法.设f(x)=kx+b,那么f [f(x)]=f(kx+b)=k(kx+b)+b=k 2x+kb+b,利用对应系数相等即可求得k=2-,b=2--1或k=2,b=2-1.答案:f(x)=2-x 2--1或f(x)=2x+2-14.〔2007黄冈第一次高三诊断试卷,17〕二次函数f(x)满足条件f(0)=1,及f(x+1)-f(x)=2x.(1)求f(x)解析式;(2)求f(x)在[-1,1]上最值.分析:此题求函数解析式根本方法仍然是待定系数法,但确定待定系数方法是根据代数式恒等对应项系数相等来确定.求函数在给定区间上最值时,要注意对称轴位置.解:(1)由f(0)=1,可设f(x)=ax 2+bx+1.那么由f(x+1)-f(x)=2x,可得2ax+a+b=2x.∴a=1,a+b=0,即b=-1.∴f(x)=x 2-x+1.(2)∵f(x)=x 2-x+1=(x 21-)2+43, 又x∈[-1,1],∴当x=21时有最小值43,x=-1时有最大值3. 【例题4】二次函数f(x)=ax 2+bx+c,a∈N *,c≥1,a+b+c≥1,方程ax 2+bx+c=0有两个小于1不等正根,那么a 最小值为( )B.3C.4解析:由题意有由于方程有两个小于1不等正根,画图可知0<a b 2-<1,即b 2<4a 2. ∴4ac<b 2<4a 2,即a(a-c)>0.又a∈N *,且c≥1,∴a 最小值为2.答案:A绿色通道一般地,一元二次方程根分布情况问题往往从三个角度加以考虑:Δ符号,对称轴是否在区间内,端点函数值正负.变式训练2+2mx+2m+1=0.假设方程有两根,其中一根在区间(-1,0)内,另一根在区间(1,2)内,求m 范围. 分析:二次方程根问题实质上是讨论二次函数图象与x 轴交点与坐标原点位置关系问题,因此,理解交点及二次函数系数(a ——开口方向,a 、b ——对称轴,c ——图象与y 轴交点)几何意义,掌握二次函数图象特点,是解决此类问题关键.解:条件说明抛物线f(x)=x 2+2mx+2m+1与x 轴交点分别在区间(-1,0)和(1,2)内,画出示意图,得⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧->-<∈-<⇒⎪⎪⎩⎪⎪⎨⎧>+=<+=>=-<+=.65,21,,21056)2(024)1(02)1(012)0(m m R m m m f m f f m f ∴65-<m<21-. 教材链接1.[探索与研究]设一次函数y=5x-3,取一系列x值,使得每一个x值总是比前一个大2,然后计算对应y值,这一系列函数值之间有什么关系?对任意一个一次函数都有类似性质吗?答:对于一次函数y=5x-3,取一系列x值总是比前一个大2时,那么有与之对应每一个y值总是比前一个大10;对任意一个一次函数y=kx+b(k>0),假设取一系列x值总是比前一个大m 时(m为正整数),那么有与之对应每一个y值总是比前一个大mk.2.[探索与研究]结合课件1207,对一次函数性质进展探索.答:注意强调一次函数定义中一次项系数k≠0这一条件,当k=0时,函数为y=b,它不再是一次函数,它图象是一条与x轴平行直线,通常称为常值函数.函数值改变量y2-y1与自变量改变量x2-x1比值,称作函数x1到x2之间平均变化率,对一次函数来说它是一个常数,等于这条直线斜率.一次函数y=kx+b(k≠0)单调性与一次项系数正负有关,当k>0时,函数为增函数,当k<0时,函数为减函数.理由如下:设x1、x2是任意两个不相等实数,且x1<x2,那么Δx=x2-x1>0,所以Δy=f(x2)-f(x1)=(kx2+b)-(kx1+b)=k(x2-x1)=kΔx.当k>0时,kΔx>0,所以Δy>0,所以f(x)在R上是增函数;当k<0时,同理可证f(x)在R上是减函数.要准确地作出一次函数图象,只要找准图象上两个点即可,这两个点通常是找图象与坐标轴交点.3.[探索与研究]在同一坐标系中,作函数y=x2,y=(x+1)2,y=(x-1)2,y=x2+1,y=x2-1图象,研究它们图象之间关系.答:列表:x …-3 -2 -1 0 1 2 3 …y=x2…9 4 1 0 1 4 9 …y=(x+1)2… 4 1 0 1 4 9 16 …y=(x-1)2…16 9 4 1 0 1 4 …y=x2+1 …10 5 2 1 2 5 10 …y=x2-1 …8 3 0 -1 0 3 8 …在同一坐标系中画出这五个图,如图2-2-1所示:图2-2-1通过图象,可知后四个图象都可以由y=x2通过左右上下平移得到,y=(x+1)2由y=x2向左平移一个单位得到;y=(x-1)2由y=x2向右平移一个单位得到,y=x2+1由y=x2向上平移一个单位得到,y=x 2-1由y=x 2向下平移一个单位得到.4.[探索与研究]二次函数y=ax 2+bx+c=a(x+a b 2)2+中a 、b 、c 对函数性质与图象各有哪些影响? 答:二次函数y=ax 2+bx+c(a≠0)中系数a 、b 、c 决定着函数图象和性质.(1)二次项系数a 决定了函数图象开口方向、开口大小和单调性,当a>0时,开口向上,a 越大,开口越小,函数在对称轴两侧先减后增.当a<0时,开口向下,a 绝对值越大开口越小,函数在对称轴两侧先增后减.(2)b 是否为零决定着函数奇偶性.当b=0时,函数为偶函数;当b≠0且c≠0时,函数既不是奇函数也不是偶函数.(3)c 是否为零决定着函数图象是否经过原点.另外,a 和b 共同决定着函数对称轴,a 、b 和c 三者共同决定着函数顶点位置.5.[探索与研究]请同学们自己探索研究一下,给定哪些条件,才能求出一个具体二次函数.答:运用待定系数法求二次函数解析式时,一般可设出二次函数一般形式y=ax 2+bx+c(a≠0),但如果函数对称轴或顶点坐标或最值,那么解析式可设为y=a(x-h)2+k 会使求解比拟方便.具体来说:(1)顶点坐标为(m,n),可设为y=a(x-m)2+n,再利用一个独立条件求a;(2)对称轴方程x=m,可设为y=a(x-m)2+k,再利用两个独立条件求a 与k;(3)最大值或最小值为n,可设为y=a(x+h)2+n,再利用两个独立条件求a 与h;(4)二次函数图象与x 轴只有一个交点时,可设为y=a(x+h)2,再利用两个独立条件求a 与h.。
导航学-导航学4-3-2019

GLONASS导航系统性能
可用GLONASS卫星
30 25
GLONASS constellation status,
19.12.2019
…
14 子
15 子
…
61 子
…
64 子
65 子
66 子
67 子
…
72 子
73 子
74 子
75 子
帧
帧帧帧帧Βιβλιοθήκη 帧帧帧帧帧帧帧
帧帧帧帧
该
星时 第的
星
号间 1 星
星
及修 颗历
历
系正 卫数
统值 星据
第的 5星 颗历 卫数 星据
星时 号间 及修 系正 统值
第的 21星 颗历 卫数 星据
第的 备 24星 用 颗历
频率有限制地使用。 第三阶段(2019年以后)
这一阶段只使用标号为k= -7…+6的频率,而标号为k=+5和 +6的频率仅在短时间内 (如卫星替补期间)有限制地使用。
GLONASS卫星信号
GLONASS测距码
GLONASS采用的伪随机测距码是一种最长移位寄存器序列(M 序列)。与GLONASS定位服务相对应,分别为用于标准精度通 道服务CSA的标准精度测距伪随机码(C/A码)和用于高精度通道 服务CHA的高精度测距伪随机码(P码)。
180 90 0 -90 -180
empty
7/7
17/24
'94 launch
9/6
'95 launch
导航学英语七年级上册电子版

导航学英语七年级上册电子版1、Is there ____ for one more in the car? [单选题] *A. seatB. situationC. positionD. room(正确答案)2、_______ a busy afternoon! [单选题] *A. HowB. What(正确答案)C. WhichD. Wish3、—______ do you play basketball?—Twice a week.()[单选题] *A. How often(正确答案)B. How muchC. How manyD. How long4、--All of you have passed the test!--_______ pleasant news you have told us! [单选题] *A. HowB. How aC. What(正确答案)D. What a5、2.I think Game of Thrones is ________ TV series of the year. [单选题] * A.excitingB.more excitingC.most excitingD.the most exciting (正确答案)6、33.Will Mary's mother ______ this afternoon? [单选题] *A.goes to see a filmB.go to the filmC.see a film(正确答案)D.goes to the film7、The green shorts are _______ sale for $[单选题] *A. forB. on(正确答案)C. atD. with8、4.—Let's fly a kite when you are ________ at the weekend.—Good idea. [单选题] * A.warmB.kindC.smallD.free(正确答案)9、Tom’s mother will let him _______ traveling if he comes back?in five days. [单选题] *A. to goB. goesC. wentD. go(正确答案)10、If the trousers are too long, ask the clerk to bring you a shorter _____. [单选题] *A. suitB.setC.oneD.pair(正确答案)11、69.Online shopping is easy, but ________ in the supermarket usually ________ a lot of time. [单选题] *A.shop; takesB.shopping; takeC.shop; takeD.shopping; takes(正确答案)12、Experts are making an investigation on the spot. They want to find a way to()the tower. [单选题] *A. Restore(正确答案)B. resumeC. recoverD. reunite13、Mike and his friend are going to the _______ to see the new action movie tonight. [单选题] *A. book shopB. restaurantC. concertD. cinema(正确答案)14、Simon does not()his fellow workers because they often argue over trivial matters. [单选题] *A. get on with(正确答案)B. come up withC. do away withD. go on with15、Nick got out of bed and _______ a shower. [单选题] *A. practicedB. took(正确答案)C. didD. made16、____ father is a worker. [单选题] *A.Mike's and Mary'sB. Mike and Mary's(正确答案)C. Mike's and MaryD. Mike and Marys'17、—Where did you get the book?—From my friend. I ______ it three days ago. ()[单选题] *A. lentB. borrowed(正确答案)C. keptD. returned18、18.Monica wants to be a _______. She is good at sports and she loves teaching others. [单选题] *A.coach(正确答案)B.secretaryC.architectD.waiter19、I gave John a present but he gave me nothing_____. [单选题] *A.in advanceB.in vainC.in return(正确答案)D.in turn20、—I can’t always get good grades. What should I do?—The more ______ you are under, the worse grades you may get. So take it easy!()[单选题] *A. wasteB. interestC. stress(正确答案)D. fairness21、Sichuan used to have more people than ______ province in China. [单选题] *A. otherB. any other(正确答案)C. anotherD. any others22、Guilin is _______ its beautiful scenery. [单选题] *A. famous for(正确答案)B. interested inC. fond ofD. careful with23、He _______ maths. [单选题] *A. does well in(正确答案)B. good atC. is well inD. does well at24、During the Spring Festival, people in Northern China usually eat _______ as a traditional Chinese food. [单选题] *A. pizzaB. dumplings(正确答案)C. hamburgersD. noodles25、27.My father is a professor and he works in__________ university. [单选题] *A.a (正确答案)B.anC./D.the26、I always make my daughter ______ her own room.()[单选题] *A. to cleanB. cleaningC. cleansD. clean(正确答案)27、You _____ smoke in the library, or you will be driven away. [单选题] *A. can'tB. mustn't(正确答案)C. will notD. may not28、15.This kind of bread is terrible. I do not want to eat it ________. [单选题] * A.any more(正确答案)B.some moreC.no longerD.some longer29、He always ______ the teacher carefully in class. [单选题] *A. listensB. listens to(正确答案)C. hearsD. hears of30、Something must be wrong with the girl’s _______. She can’t hear clearly. [单选题] *A. ears(正确答案)B. noseC. armsD. eyes。
高中数学第二章函数2.1.1函数2.1.2函数的表示方法学习导航学案新人教B版必修1

函数-2.1.2 函数表示方法自主整理设集合A是一个非空数集,对A内任意数x,按照确定法那么f,都有唯一确定数值y与它对应,那么这种对应关系叫做集合A上一个函数,记作y=f(x),x∈A.其中,x叫做自变量,自变量取值范围A叫做函数定义域;如果自变量取值a,那么由法那么f确定值y称作函数在a处函数值,记作y=f(a)或y|x=a.所有函数值构成集合{y|y=f(x),x∈A}叫做函数值域.函数定义含有三个要素,即定义域A、值域C与对应法那么f.当且仅当两个函数定义域与对应法那么都分别一样时,这两个函数才是同一个函数.(1)在数轴上,区间可以用一条以a,b为端点线段来表示(如下表).用实心点表示端点包括在区间内,用空心点表示端点不包括在区间内.定义名称符号数轴表示{x|a≤x≤b}闭区间[a,b]{x|a<x<b}开区间(a,b){x|a≤x<b}半开半闭区间[a,b){x|a<x≤b}半开半闭区间(a,b](2)无穷区间概念:关于-∞,+∞作为区间一端或两端区间称为无穷区间,它定义与符号如下表:{x|x≥a}[a,+∞){x|x>a}(a,+∞){x|x≤a}(-∞,a]{x|x<a}(-∞,a)R(-∞,+∞)取遍数轴上所有值设A、B是两个非空集合,如果按某种对应法那么f,对A内任意一个元素x,在B中有一个且仅有一个元素y与x对应,那么称f是集合A 到集合B映射.这时,称y是x在映射f作用下象,记作f(x).于是y=f(x),x称作y原象,映射f也可记为f:A→B,x→f(x).其中A叫做映射f定义域(函数定义域推广),由所有象f(x)构成集合叫做映射f值域,通常记作f(A).(1)列表法:通过列出自变量与对应函数值表来表达函数关系方法;(2)图象法:就是用函数图象来表达函数关系;(3)解析法:如果在函数y=f(x)(x∈A)中,f(x)是用代数式(或解析式)来表达,那么这种表达函数方法叫做解析法(也称公式法).在函数定义域内,对于自变量x不同取值区间,有着不同对应法那么,这样函数通常叫做分段函数.高手笔记1.(1)“y=f(x)〞中“f〞是函数符号,可以用任意字母表示,如“y=g(x)〞;(2)函数符号“y=f(x)〞中f(x)表示与x对应函数值,是一个数,而不是f 乘x.2.对应法那么可以有多种形式给出,可以是解析法,可以是列表法与图象法,不管是哪种形式,都必须是确定,且使集合A中每一个元素在B 中都有唯一元素与之对应.3.函数是建立在两个非空数集间一种对应,假设将其中条件“非空数集〞弱化为“任意两个非空集合〞,按照某种法那么可以建立起更为普通元素之间对应关系,这种对应就叫映射.A到B映射与B到A映射是截然不同.4.区间与数轴是严密联系在一起,在识别与使用区间符号时都不能脱离开数轴.区间端点值取舍是很容易出错地方,一定要准确判断是该用小括号还是中括号,正确书写.在用数轴表示时也要注意实心点与空心点区别.对于某些不能用区间表示集合就仍用集合符号表示.5.对于分段函数问题,一般要分别转化成在定义域内每一个区间上来解决.要明确分段函数是一个函数,不是多个函数,只是这个函数较为特殊,不像一般函数可以用一个解析式表示,而只能分段表示.分段函数画法要领是根据各段上函数解析式,分段画出各段图象.6.假设y=f(u),u=g(x),x∈(a,b),u∈(m,n),那么y=f[g(x)]称为复合函数,u称为中间变量,它取值范围是g(x)值域与(m,n)交集.名师解惑1.如何理解构成函数三要素:定义域、对应关系与值域求值域有几种常用方法剖析:(1)解决一切函数问题必须认真确定该函数定义域,函数定义域包含三种形式:①自然型:指函数解析式有意义自变量x取值范围(如:分式函数分母不为零,偶次根式函数被开方数为非负数,等等);②限制型:指命题条件或人为对自变量x限制,这是函数学习重点,往往也是难点,因为有时这种限制比拟隐蔽,不容易注意,或者即使注意到,在解题时却忘记用到;③实际型:解决函数综合问题与应用问题时,应认真考察自变量x实际意义.(2)求函数值域是比拟困难数学问题,中学数学要求能用初等方法求一些简单函数值域问题.求法主要有以下几种:①配方法(转化为二次函数);②判别式法(转化为二次方程);③不等式法(运用不等式各种性质);④函数法(运用根本函数性质或抓住函数单调性、函数图象等).2.函数有哪几种表示法?各有什么优点与缺乏?剖析:(1)表示函数有三种方法:解析法,列表法,图象法.现实生活中如:商场各种商品与其价格之间函数关系就是用列表法表示;房地产公司出售商品房,总价格与面积之间函数关系就是用解析式来表示;工厂每月产量与月份之间函数关系是用图表来表示.(2)表示函数三种方法优点与缺乏,分别说明如下.①用解析式表示函数优点是简明扼要、标准准确.可以利用函数解析式求自变量x=a时对应函数值,还可利用函数解析式列表、描点、画函数图象,进而研究函数性质,又可利用函数解析式构造特点,分析与发现自变量与函数间依存关系,猜测或推导函数性质(如对称性、增减性等),探求函数应用等.缺乏之处是有些变量与函数关系很难或不能用解析式表示,求x与y对应值需要逐个计算、有时比拟繁杂.②列表法优点是能鲜明地显现出自变量与函数值之间数量关系,于是一些数学用表应运而生.如用立方表、平方根表分别表示函数.商店职员也制作售价与数量关系计价表,方便收款.列表法缺点是只能列出局部自变量与函数对应值,难以反映函数变化全貌.③用图象表示函数优点是形象直观,清晰呈现函数增减变化、点对称、最大(或小)值等性质.图象法缺乏之处是所画出图象是近似、局部,观察或由图象确定函数值往往不够准确.由于以上表示函数三种方法具有互补性,因此在实际研究函数时,通常是三种方法交替使用.3.如何理解映射?为什么说映射是一种特殊对应剖析:(1)理解映射概念,必须注意以下几点:①方向性,“集合A到集合B映射〞与“集合B到集合A映射〞往往不是同一个映射;②非空性,集合A、B必须是非空集合;③唯一性,对于集合A中任何一个元素,集合B中都是唯一确定元素与之对应,这是映射唯一性,也可以说“在集合B中〞,A中任一元素象必在集合B中,也叫映射封闭性.④存在性,就是说对集合A中任何一个元素,集合B中都有元素与它对应,这是映射存在性.(2)映射也是两个集合A与B元素之间存在某种对应关系.说其是一种特殊映射,就是因为它只允许存在“一对一〞与“多对一〞这两种对应,而不允许存在“一对多〞对应.映射中对应法那么f是有方向,一般来说从集合A到集合B映射与从集合B到集合A映射是不同.讲练互动【例题1】以下各组中两个函数表示同一个函数是…( )A.f(x)=x,g(x)=n n x22B.f(n)=2n+1(n∈Z),g(n)=2n-1(n∈Z)C.f(x)=x-2,g(t)=t-2D.f(x)=,g(x)=1+x解析:两个函数一样必须有一样定义域、值域与对应法那么.A中两函数值域不同;B中虽然定义域与值域都一样,但对应法那么不同;C 中尽管表示自变量两个字母不同,但两个函数三个要素是一致,因此它们是同一函数;D中两函数定义域不同.答案:C绿色通道给定两个函数,要判断它们是否是同一函数,主要看两个方面:一看定义域是否一样;二看对应法那么是否一致.只有当两函数定义域一样且对应法那么完全一致时,两函数才可称为同一函数.只要三者中有一者不同即可判断不是同一个函数,比方上面对A判断即属此.变式训练1.判断以下各组中两个函数是否为同一函数,并说明理由.(1)y=x-1,x∈R 与y=x-1,x∈N ; (2)y=42-x 与y=22+•-x x ; (3)y=1+x 1与u=1+v1;(4)y=x 2与y=x 2x ;(5)y=2|x|与y=分析:判断两个函数是否为同一函数,应着眼于两个函数定义域与对应法那么比拟,而求定义域时应让原始解析式有意义,而不能进展任何非等价变换,对应法那么判断需判断它本质是否一样而不是从外表形式上下结论.解:(1)不同,因为它们定义域不同.(2)不同,前者定义域是x≥2或x≤-2,后者定义域是x≥2.(3)一样,定义域均为非零实数,对应法那么都是自变量取倒数后加1.(4)不同,定义域是一样,但对应法那么不同.(5)一样,将y=2|x|利用绝对值定义去掉绝对值结果就是y=【例题2】设f,g 都是由A 到A 映射,其对应法那么(从上到下)如下表:表1 映射f 对应法那么原象1 2 3 象 2 3 1 表2 映射g 对应法那么原象123象213试求f[g(1)],g[f(2)],f{g[f(3)]}.分析:此题是将映射概念与复合函数求值相结合一道典型例题,解答此题首先要弄清f[g(x)]含义与映射中原象与象关系,然后再按照有关定义解题.解:∵g(1)=2,f(2)=3,∴f[g(1)]=f(2)=3.又∵g(3)=3,∴g[f(2)]=g(3)=3.∵f(3)=1,g(1)=2,∴f{g[f(3)]}=f[g(1)]=f(2)=3.绿色通道读懂对应法那么f与g含义是解题关键,要弄清在法那么f与g作用下,集合A中元素在集合A中象是什么,要掌握象与原象定义.变式训练2.以下各图中表示对应,其中能构成映射个数是…( )图2-1-1A.4B.3C.2解析:所谓映射,是指多对一或一对一对应且A中每一个元素都必须参与对应.只有图(3)所表示对应符合映射定义,即A中每一个元素在对应法那么下,B中都有唯一元素与之对应.图(1)不是映射,因A中元素c没有参与对应,即违背A中任一元素都必须参与对应原那么.图(2)、图(4)不是映射,这两个图中集合A中元素在B中有多个元素与之对应,不满足A中任一元素在B中有且仅有唯一元素与之对应原那么.综上,可知能构成映射个数为1.答案:D3.(2007山东济宁二模,理10)A={a,b,c},B={-1,0,1},函数f:A→B满足f(a)+f(b)+f(c)=0,那么这样函数f(x)有( )解析:对f(a),f(b),f(c)值分类讨论.当f(a)=-1时,f(b)=0,f(c)=1或f(b)=1,f(c)=0,即此时满足条件函数有2个;当f(a)=0时,f(b)=-1,f(c)=1或f(b)=1,f(c)=-1或f(b)=0,f(c)=0,即此时满足条件函数有3个;当f(a)=1时,f(b)=0,f(c)=-1或f(b)=-1,f(c)=0,即此时满足条件函数有2个.综上所得,满足条件函数共有2+3+2=7(个).应选C.答案:C【例题3】求以下函数值域:(1)y=x2-2x-1,x∈[0,3];(2)y=3x;-2+(3)y=;(4)y=|x-1|+|x-2|.分析:求二次函数值域一般要数形结合,先配方找出对称轴,再考察给定区间与对称轴关系,利用二次函数在对称轴两侧单调性,求出给定区间上最大值与最小值,即可得到函数值域.除数形结合之外,求函数值域方法还有逐步求解法、判别式法、别离常数法与利用有界性等.绝对值函数通常先化为分段函数.解:(1)将原式变形,得y=(x-1)2-2,此函数对称轴为x=1,由于x∈[0,3],∴当x=1时,y 有最小值-2.根据函数对称性知,x=3比x=0时值要大,∴当x=3时,y 有最大值2.∴这个函数值域为[-2,2].(2)易知x≥2,∴2-x ≥0. ∴y=2-x +3≥3.∴这个函数值域为[3,+∞).(逐步求解法)(3)先别离常数,y=1311311222222+-=+-+=+-x x x x x .① 解法一(逐步求解法):∵x 2+1≥1,∴0<≤1.∴1>1≥-2.∴y∈[-2,1).解法二(判别式法):两边同乘x 2+1并移项,得(y-1)x 2+y+2=0. 又由①可知y<1,∴Δ=-4(y-1)(y+2)≥0.∴y∈[-2,1).解法三(利用有界性):∵y≠1,易得x 2=.又∵x 2≥0,∴≥0.∴y∈[-2,1).(4)原函数可化为y=由图2-1-2可知y∈[1,+∞).图2-1-2绿色通道求值域一定要注意定义域限制,一定要在定义域范围内求函数值域.当然,求值域一定要根据函数对应关系来确定.如果我们抓住了这些解决问题关键,求这类问题就能得心应手.变式训练4.函数y=-x2+4x+5(1≤x≤4)值域是…( )A.[5,8]B.[1,8]C.[5,9]D.[8,9]解析:y=-x2+4x+5=-(x-2)2+9(x∈[1,4]).∴当x=2时,y最大=9;当x=4时,y最小=5.∴函数值域为{y|5≤x≤9}.答案:C【例题4】图2-1-3是一个电子元件在处理数据时流程图:图2-1-3(1)试确定y与x函数关系式;(2)求f(-3)、f(1)值;(3)假设f(x)=16,求x值.分析:此题是一个分段函数问题,当输入值x≥1时,先将输入值x加2再平方得输出值y;当输入值x<1时,那么先将输入值x平方再加2得输出值y.解:(1)y=(2)f(-3)=(-3)2+2=11;f(1)=(1+2)2=9.(3)假设x≥1,那么(x+2)2=16,解得x=2或x=-6(舍去).假设x<1,那么x2+2=16,解得x=14(舍去)或x=14-.综上,可得x=2或x=14-.绿色通道通过实例,了解简单分段函数并能简单应用是新课程标准根本要求.对于分段函数来说,给定自变量求函数值时,应根据自变量所在范围利用相应解析式直接求值;假设给定函数值求自变量,应根据函数每一段解析式分别求解,但应注意要检验该值是否在相应自变量取值范围内.变式训练5.(2007山东蓬莱一模,理13)设函数f(n)=k(k∈N*),k是π小数点后第n位数字,π=3.141 592 653 5…,那么等于____________.解析:由题意得f(10)=5,f(5)=9,f(9)=3,f(3)=1,f(1)=1,…,那么有=1.答案:1【例题5】函数f(x+1)=x2-1,x∈[-1,3],求f(x)表达式.分析:函数是一类特殊对应,函数f(x+1)=x2-1,即知道了x+1象是x2-1,求出x象,即是f(x)表达式.求解f(x)表达式此题可用“配凑法〞或“换元法〞.解法一(配凑法):∵f(x+1)=x2-1=(x+1)2-2(x+1),∴f(x)=x2-2x.又x∈[-1,3]时,(x+1)∈[0,4],∴f(x)=x2-2x,x∈[0,4].解法二(换元法):令x+1=t,那么x=t-1,且由x∈[-1,3]知t∈[0,4],∴由f(x+1)=x2-1,得f(t)=(t-1)2-1=t2-2t,t∈[0,4].∴f(x)=(x-1)2-1=x2-2x,x∈[0,4].绿色通道函数f[g(x)]表达式,求f(x)表达式,解决此类问题一般有两种思想方法,一种是用配凑方法,一种是用换元方法.所谓“配凑法〞即把f[g(x)]配凑成关于g(x)表达式,而后将g(x)全用x取代,化简得要求f(x)表达式;所谓“换元法〞即令f[g(x)]中g(x)=t,由此解出x,即用t表达式表示出x,后代入f[g(x)],化简成最简式.需要注意是,无论是用“配凑法〞还是用“换元法〞,在求出f(x)表达式后,都需要指出其定义域,而f(x)定义域即x取值范围应与条件f [g(x)]中g(x)范围一致,所以说求f(x)定义域就是求函数g(x)值域.变式训练6.函数f(x)对于任意实数x满足条件f(x+2)=,假设f(5)=-5,那么f [f(1)]=___________.解析:∵f(x+2)=,∴f(x)=.∴f(1)===f(5)=-5.∴f(1)=-5.∴f[f(1)]=f(-5).又f(-5)=)23(11)3(1)25(1+---=--=+--f f f =f(-1)=51)1(1)21(1--=-=+--f f =51, ∴f[f(1)]=51. 答案:51 7.f(x)=x +11(x∈R 且x≠-1),g(x)=x 2+2(x∈R ), (1)求f(2)、g(2)值.(2)求f [g(2)]值.(3)求f [g(x)]解析式.分析:在解此题时,要理解对应法那么“f〞与“g〞含义,在求f [g(x)]时,一般遵循先里后外原那么.解:(1)f(2)=,g(2)=22+2=6.(2)f [g(2)]=f(6)=.(3)f [g(x)]=f(x 2+2)=.教材链接[思考与讨论]如何检验一个图形是否是一个函数图象写出你检验法那么,图2-1-4所示各图形都是函数图象吗哪些是,哪些不是,为什么图2-1-42-1-4所示各图形中因为(1)、(3)、(4)符合“一对一〞或“多对一〞原那么,所以(1)、(3)、(4)是函数图象,而(2)中有一个x 值对应两个y 值,不满足函数“多对一〞或“一对一〞条件,所以(2)不是函数图象.。
导航学-导航学3-2-2019

lim
C
i b
(t
t 0
t) t
C
i b
(t)
C
i b
(
t
t)
C
i b
(
t
)
(
I
b)
0
θb
Y
P
Y 0
R
P
R
,
0
k sin k , k R , P ,Y
C
i b
C
i b
(
t
)
航向角ψ、俯仰角θ、滚动角γ 一、欧拉微分方程
从地理坐标系到载体坐标系 的旋转顺序:
Ψ →θ →γ
方向余弦矩阵: Cnb C C C
武汉大学测绘学院卫星应用工程研究所
/isa/
姿态计算 ——一、欧拉角微分方程
c ocs os
s in c os
0 0 CC 0 C 0
0 0
1 0
0 cos 0 sin
sin sin cos cos cos
求解欧拉角速率得
1 0 0 cos 0 sin
s in
c c o os ss s iis c n nio n s s s i in c n sions s s iin n s s iis c n nio n c c s o oc ss sionc c s o o c ss sio n
lim
t 0
θb t
θb lim t 0 t
导航学-导航学3-7-精品文档21页
b ib
)实现完全自对准的方法。
在静基座条件下,有
L eL
0
,
b Lb
0 ,V b
0,
地球自转角速度
L ie
、重力
g
L
、测站纬度 。
均为已知。
而陀螺仪和加速度计的输出是
b ibb ieb eLb Lbb ieC L b iL e
fb ibVb(2b ieb eb)VbgbgbC L bgL
惯导系统初始对准
一、惯导系统初始对准概述 二、惯导系统的静基座初始对准
一、惯导系统初始对准概述
1.1 初始对准的必要性
加速度计
a
∫V
∫P
Z
∫ ,,
Y
X
积分运算必须知道
初始值!
一、惯导系统初始对准概述
1.2 初始对准的分类
粗对准
精对准
自主对准
对准阶段
静基座
对外信息 的需求
初始对准
基座 运动状态
非自主 对准
(1)采用KALMAN滤波进行初始对准,就是将平台误差角 ΨN,ΨE,ΨD从随机误差和随机干扰中估计出来, 通过系统的校正使平台坐标系与导航坐标系对准;
(2)同时,尽可能估计出陀螺漂移和加速度计偏置;
(3)时间不长,因此陀螺漂移和加速度计偏置可看作常值;
(4)根据分离定理,对随机系统和最优估计和最优控制 可以分开单独考虑,故可用卡尔曼滤波器对平台误差 角及惯性仪表的误差进行单独研究。
(Rb)T
条件:
Wien 和 g n 不共线
0 A 0
iecos
0
iegcos
giecos 0
0
方案二. 由加速度计信号进行水平自对准
导航工程技术专业学习教程从基础到高级的系统学习路径

导航工程技术专业学习教程从基础到高级的系统学习路径导航工程技术是一门研究地球上天体和人造卫星之间相互测量、定位、导航、控制及计算的学科。
随着全球定位系统(GPS)、北斗卫星导航系统、伽利略卫星导航系统等的广泛应用,导航工程技术得到了广泛发展。
本教程将系统地介绍导航工程技术的学习路径,从基础到高级,帮助学习者全面了解和掌握导航工程技术的知识和技能。
一、基础篇1.1 地理学基础地理学是导航工程技术的基础学科之一。
学习者应该了解地理学的基本概念、地球的地理特征以及地球坐标系统等基础知识。
1.2 测量学基础测量学是导航工程技术中不可或缺的学科。
学习者需要学习测量学的基本原理、测量仪器的使用和测量数据的处理方法等。
1.3 数学基础数学是导航工程技术的基础工具之一。
学习者需要掌握高等数学、线性代数和概率统计等数学知识,以应用于导航工程技术的计算和建模等方面。
1.4 电子工程基础电子工程基础是导航工程技术中的关键学科。
学习者需要学习电路原理、数字电路和信号处理等相关知识,以理解导航系统的工作原理和技术。
二、导航原理篇2.1 导航系统基础学习者应该了解各种导航系统的基本原理和特点,包括GPS、北斗卫星导航系统和伽利略卫星导航系统等。
2.2 定位算法与方法学习者需要学习各种定位算法和方法,包括传统的三角测量定位、惯性导航系统和扩频码测距等。
2.3 惯性导航原理惯性导航是一种独立于地面设施的导航方式,学习者需要了解惯性导航的原理和应用,以及惯性测量单元的工作原理。
2.4 多传感器融合多传感器融合是提高导航系统定位精度和鲁棒性的关键技术,学习者需要学习传感器融合的原理和算法,以及融合系统的设计和实现。
三、导航应用篇3.1 航空导航技术航空导航技术是导航工程技术的重要应用领域之一,学习者需要学习航空导航系统的原理、航路规划和导航方法等。
3.2 海洋导航技术海洋导航技术是导航工程技术的另一个重要应用领域,学习者需要学习海洋导航系统的原理、海图解读和水文测量等。
导航学定位与导航基础

2020/8/1
24
主讲:魏二虎
2.欧拉角法(2013-11-15)
• 一个向量在空间直角坐标系中,可以用 两个独立的角度来确定,若在刚体上确 定这样一个与刚体固联的向量,刚体相 对于空间的角位置除确定此向量的两个 独立转动角度外,还需要一个角度描述, 刚体绕这一空间向量的转动,这样三个 独立的角度可以确定刚体相对于参考坐 标系的角位置。这样描述刚体相对于参 考坐标系角位置的三个独立转动角度称 为欧拉角。
2.1.1 导航中常用的坐标系
2. 地球坐标系(e系)
✓地球坐标系也称为地心地球固 联坐标系,该坐标系随地球一起 转动。
✓原点在地心,轴沿地球自转轴 的方向,在赤道平面内,与零度 子午线相交,也在赤道平面内, 与构成右手直接坐标系。
✓在导航定位中,运载体相对的 地球的位置也就是运载体在地球 坐标系中的位置,既可以用地球 坐标系的直角坐标表示,也可以 用地球上的经纬高表示。
8. 计算坐标系(c系)
✓ 惯性导航系统利用本身计算的载体位置来描述 导航坐标系时,坐标系因惯性导航系统有位置 误差而有误差,这种坐标系称为计算坐标系。
✓ 一般它在描述惯性导航误差和推导惯性导航误 差时比较有用。
2020/8/1
18
主讲:魏二虎
§ 2.1 常用坐标系及变换
2.1.2 刚体的空间角位置描述与坐标变换
刚体在空间的角位置用与刚体固联的坐 标系相对于所选用的参考坐标系的角度 关系来描述,通常采用方向余弦法和欧 拉角法。
2020/8/1
19
主讲:魏二虎
1.方向余弦与坐标变换
• 方向余弦矩阵用来描述坐标系之间的角 位置关系外,另一个重要作用是用于坐 标变换,也正因为如此,方向余弦矩阵 也称为坐标变换矩阵。将某个点或某个 矢量在一个坐标系中投影变换到在另一 原点相同的坐标系中的投影。
导航学(第三章)

空间距离差交会
V1 a11 V a 2 21 Vmi ami 1
a12 a22 ami 2
a13 a23 ami 3
dX W1 W dY 2 dz ami 4 d f Wmi a14 a24
(mi 4)
采用最小二乘得到最优估计值
空间距离差交会
多普勒导航(子午卫星系统)
空间距离差交会
1.椭球面方程:
2. 双曲线方程1:
3. 双曲线方程2:
空间距离差交会
定位解算
基本思想:利用初值对方程线性化,采用迭代计算改正量,将得到 的改正量修正初值,得到最后解
Y0 YM Y0 Y1 Z 0 Z M Z 0 Z1 X 0 X M X 0 X1 0 ( ) dX ( ) dY ( )dZ ( DM D10 ) D1 0 0 0 0 0 0 0 DM D1 DM D1 DM D1 X0 XM X0 X2 Y0 YM Y0 Y2 Z0 Z M Z0 Z2 0 0 ) dX ( ) dY ( )dZ ( DM D2 ) D2 0 ( 0 0 0 0 0 0 D D D D D D M 2 M 2 M 2 X Y0 Z0 X 0 2 Y0 2 Z 0 2 0 2( 2 dX 2 dY 2 dZ ) ( 2 2 2 ) 1 0 a b a a b a 代入继续
脉冲法测距,实质上是用尖锐的脉冲对时间轴进行标定,然后 通过脉冲间隔读取时间,进而测量距离。 优点:可以直接测定时间差,因而可以直接得到距离差 缺点:测量精度较差,与钟的性能有关
导航学(第一章)导航系统概述
27/65
民用机场上的TACAN系统
TACA N
使用URN 25 Tacan 导航系统的 英国航母
野战机场上的TACAN系统
28/65
罗兰(LORAN)导航系统
• 罗兰导航系统是一种 根据测量距离差来定 位的系统,全名是远 程式导航系统 (LONG RANGE NAVIGATION SYSTEM)。 • 目前使用的罗兰C导航 系统作用距离可达 2000公里,定位精度 优于300米。
6/65
第一章 导航系统概述
内容提纲
1.1、引言 §1.2、导航技术发展简史 §1.3、导航技术中常用的基本参数 §1.4、思考与练习题
7/65
§ 1.1 引言
(1)何为导航? • 提供载体的导航参数,位置、速度和姿态 • 引导载体从出发点到达目的地的技术和方法 (2)与大地测量的区别
作用对象 导航 大地测量 运动载体 大地地物 定位形式 动态定位 静态定位 输出物理量 速度、姿态、位置 精确位置 实时性要求 很高 不高 位置精度要求 米、十米级 厘米、毫米级
天文导航
• 依靠星体的信息定位的一种导航方式。 • 受天气影响较大,误差较大。
20/65
天文导航
星敏感器 跟踪标志 星
21/65
§1.2、导航技术发展简史 1.2.1、早期导航方式(19世纪前)
早期人们还利用地标进行导航。在运载体上用光学等 方法,量测到(已标明位置的)地物地标的距离、方 位等几何参量,用测向或测距法定出运载体瞬时地理 位置。 常用的仪器有六分仪、经纬仪、望远镜等。
导航学
教授:魏二虎
1/65
课程目的意义
• 意义:导航技术是众多应用领域的关键基础技术!
飞机
导航学
Vorkuta
Krasnoznamensk SCC MS
Zelenchuk
Schelkovo
MS TT&C
LS CC-M
Yenisseisk
MS
MS TT&C
Yakutsk Komsomolsk
MS TT&C
LS CC-M
MS
Ulan-Ude
MS Nurek
MS
SCC – system control center
一、GPS现代化
GPS现代化构成 空间区段现代化
Block IIR一M卫星、Black II F卫星以及GPSIII卫星上增 加发射L2C、L5、L1C和M码等新信号,以及增强卫星信 号功率等措施
地面控制区段现代化
随发射的新信号做相应升级 SAASM——GPS PPS 应用关键措施 AII——精度改善创新(Accuracy Improvement Initiative) WAGE——广域GPS提高
GNSS兼容与互用的合作, 民用信号互用共享
除全球系统,区域系统 和局域系统对其进行增 强
多系统兼容 多层次增强
多模化应用 多手段集成
除导航,还用于定位、 授时、测向
利用非卫星导航手段: 蜂窝移动通信(UMTS)网络、 WIFI网络、惯性导航、伪卫星、 无线电信标等
五、GNSS展望
GNSS 目标
CDMA
FDMA/CDMA
频率数
双频/三频
双频(未来三频)
Galileo
Galileo系统时 GTRF 3 56o
14小时05分 配备
CDMA
五频
BDS
北斗系统时 CGCS2000
3 55o / 配备
导航学3-6-2012分解PPT课件

(s
2
2 ie
)(s2
2 s
)
0
即 只 出 现 地 转 周 期 Te 和 舒 勒 周 期 Ts 。 Ts 的 起 因 是 平台 水平回路 实现了 舒勒调谐 。在第二 章中已 经作
过分 析。
.
11
系统误差传播特性曲线的求取
❖通过误差传播特性曲线可以看出特定的误 差量对于特定误差因素的响应形式。
❖下面准备求误差方程的近似解析解。略去 导致傅科振荡的两个交叉耦合项,可使求 解简单,但又不妨害对解的主要特性的了 解。
② 经度误差是独立的,因此单独考虑,不放 在方程组中处理;
③ 高度通道是不稳定的,因此高度通道不考 虑,即假设高度方向误差为0;
④ 陀螺和加速度计误差均考虑为常值误差, 不考虑其随机性。
.
5
误差方程 矩阵、行列式
02e sin来自00g
0
VVN E
2e sin
0
0
1
R
1tg
R
0 1
位置误差方程
VEsec VEsectg
R
R
VN
R
h V .
3
静基座惯导系统误差分析
分析误差基本特性时,可假定载体地面静止,即:
VEVNV 0 VE VN 0
V g
于是前述误差方程组可简化为:
V E 2esin V N g A E
V N 2esin V E g A N
导航学
(测绘工程专业)
主 讲: 朱智勤
1
惯导系统的确定性误差分析
.
2
惯性导航系统误差方程小结
数学平台误差角方程
Φ in b in nΦ in n
速度误差方程
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1996年建立的EGM96模型是360阶次的模型 2008年建立的EGM2008则为2190阶、2159次的模型,其空间分辨率已达 到 5' 5' (约9km)
大地水准面与地球椭球
地球椭球(数学表面)
大地水准面也是一个起伏不定的不 规则曲面,在这种曲面上难以进行 精确的数学计算 为了观测成果的数学表达计算和制 图工作的需要,选用一个同大地体 最为吻合、可用数学方法来表达的 几何体来代替 将椭圆绕其短轴旋转一周后所形成 的旋转椭球体就是一种理想选择。 这种用来表示大地体的旋转椭球称 为地球椭球 它是一个纯数学表面,可以用简单 的数学公式表达
四、地球重力场
正常重力位
要精确计算出地球重力位,必须知道地球表面的形 状及内部物质密度
根据地球重力位的表达式不能精确地求得地球的重 力位,为此引进一个与其近似的地球重力位——正 常重力位 正常重力位,是一个假想的、由形状和质量分布都 很规则的球体(正常地球)所产生的重力场
正常重力位可以根据正常地球的参数确定 正常重力场可以作为实际地球重力场的近似 通常以旋转椭球作为正常地球
GM V r, , r
n n a 1 Pnm sin Cnm cos m Snm sin m n 1 m 0 r
四、地球重力场
地球引力位
大地测量学家可以利用大量的卫星大地测量观测值和地 面重力测量观测值来反解球谐函数的系数,以建立地球 引力位模型,而这些模型一旦被建立,我们就可用这些 模型来计算空间任意一点的地球引力位
第二章 定位与导航基础
物体运动状态参量 地球导航的基本关系 导航常用坐标系及变换
导航中常用的基本参数
一、地球上的坐标和距离
地球上的坐标
地球上各点的位置坐标
纬度:南北方向上的坐标 经度:东西方向上的坐标 经线和纬线在地球表面构成了一个坐标网 地球上每一点的位置都可以用经度和纬度标示
五、地球磁场
地磁场随地理分布的基本特征
地球有两个磁极,北 磁极和南磁极,分别 位于地理南北极附近。 78.2º N 北磁极 102.9º W
磁南北两极的位置随
时间变化。 两磁极在地球表面上
的位置不对称
南磁极 65.6º S 139.4º E
五、地球磁场
地磁要素 地磁要素:表示任一点地磁场大小 和方向特征的物理量称为地磁要素 地磁七要素
地球引力 离心力 重力
F
P m 2
g FP
A
铅垂线方向就是重力的方向
四、地球重力场
地球引力位
任何有质量的物体都会产生引力场,用位理论来研究地 球重力场。地球引力位的大小就等于在引力场中将单位 质量移至无穷远处所做的功 如果地球是一个密度成球形均匀分布的圆球,地球引力 位的表达式就十分简单 M Vr G r 地球是一个形状不规则的球体,其质量分布不均匀,真 正的地球引力位的形式十分复杂,通常用一个无穷高阶 的多项式来无限逼近。通常采用具有这三个自变量的球 谐函数来逼近地球引力场
地球椭球是地球形体的二级逼近
几种常用的参考椭球
名 称
Re (m)
6378245 6378140 6378137
1/
f
使用国家或地区 苏联 中国 全球
①
克拉索夫斯基(1940) 1975 年国际会议推荐的参考椭球 WGS-84(1984)
298.3 298.257 298.257
②
四、地球重力场
地球磁场:指地球周围空间分布的磁场。地球近似于一个磁偶极子 (magnetic dipole),其中一极位在地理北极附近,另一极位在地理 南极附近,这两极所产生的球体磁场即为地磁场。通过这两个磁极的 假想直线(磁轴)与地球的自转轴大约成11.3度的倾斜。地球的磁场 向太空伸出数万公里形成地球磁圈(magnetosphere)。
测者地面 真地平平面 W S E 地平 平面 O 测者 铅垂线 测者 子午圈 Pn A N
测者 真地平
测者 东西圈
二、地面方向
测站南北线
测者子午圈平面与测者地面真地平平面
的交线NAS是A测者的方向基准线——南 北线
S E 地平 平面 O 测者 铅垂线 测者 子午圈 Pn A 测者地面 真地平平面 W N
测站东西线
测者东西圈平面:通过测者铅垂线 AO, 并与测者子午圈平面垂直的平面 东西圈:东西圈平面与地球面的截痕 称为东西圈(卯酉圈)
测者东西线 : 东西圈平面与测者地
面真地平平面相交的直线EAW
测者 真地平
测者 东西圈
二、地面方向
与测者有关的点、线、面及其关系
三、地球几何形状
H T cos I , X H cos D, Y sin D Z T sin I HtgI , T 2 H 2 Z 2 X 2 Y 2 Z 2 tgI Z Y , tgD H X
中一个或者几个物体作为参照物,当物体相对参考物的位置有变化时
,就说明物体有了运动。
空间一点坐标表示方法
空间直角坐标 空间极坐标
一、描述运动物体的状态参量
空间直角坐标
P(x、y、z)为空间直角坐标
空间极坐标
两者转换关系
x r sin cos y r sin sin z r cos
加速度
质点速度对时间的微分就是加速度,也是一个矢量
一、描述运动物体的状态参量
状态参量的相互关系
微分 微分
r (t )
积分
v (t )
积分
a (t )
f ( x, y, z ) 0
状态参量的三个特性
矢量性,位置、速度和加速度三个参量既有大小也有方向 瞬时性,质点的运动状态随时在变化 相对性,质点的运动状态参数在不同的参照系下有不同的描述
地磁场总强度矢量 T
北向分量(X)、东向分量(Y) 垂直分量(Z); 水平分量(H),指向为磁北方向 T的倾斜角(I),下倾I为正,反之I为负 磁偏角(D),磁北向东偏D为正,西偏D为负 地磁要素之间的关系
地理北
X
磁北
X
H
D
地理子 午面
I
Y
Y
T
Z
磁子 午面
五、地球磁场
地磁要素的转换关系
地理北X
一、地球上的坐标和距离
地球上的距离
地球表面的距离
在平面上两点之间的直线段距离最短 地球近似为球体,地球表面两点间的距离指的是弧线的长度 地球表面上的两点之间可以有很多连线,他们都是弧线 球面上两点间最短的距离如何确定?
起点和终点相同的许多弧线相比较,弧线的半径越大,弧线弯曲度就越小, 弧段的长度就越短
现在我们对地球的形状已有了一个明确的认识:地球
并不是一个正球体,而是一个两极稍扁,赤道略鼓的 不规则球体
地球的自然表面凸凹不平,形态极为复杂,不能作导
航计算的参考面(基准面)
寻求一种与地球自然表面非常接近的光滑曲面,来代
替这种不规则的曲面
大地水准面与地球椭球
大地水准面(物理表面)
水准面(静止水面)
牛顿在1687年发现万有引力定律
质量越大的东西产生的引力越大,这个 力与两个物体的质量均成正比,与两个 物体间的距离平方成反比
1831年法拉第提出力场 宇宙空间的三大力场——引力场、
电场以及磁(力)场
磁体在磁场中受力
物体在引力场中受力
电荷在电场中受力
四、地球重力场
地球的重力是由万有引力(或地心引力)和地球自转 所产生的离心力合成
r (t ) r (t t ) r (t )
一、描述运动物体的状态参量
速 度
质点位矢对时间的变化率叫速度 是反应质点运动快慢和方向的物理量
速度是矢量,有大小和方向,速度的大小称为“速率”
瞬时速度 平均速度
v lim
v r / t
r dr t 0 t dt
地球表面的弧线的最长半径应该是从地心开始的地球半径
一、地球上的坐标和距离
地球表面两点之间的最短距离
地球表面上任意两点都可以与地心构成一个 平面,这个平面和地球表面相交后形成一条 乙 甲
弧线,这条弧线就是这两点之间的最短距离
什么叫大圆?
包含地心的平面与地球表面相交,在 地球表面上所形成的圆,就是地球表
x2 y 2 z 2 1 a b c
大地水准面与地球椭球
地球椭球(数学表面)
大地水准面虽然十分复杂,但从整体来看,起伏是微小的,且形状接 近一个扁率极小的椭圆绕短轴旋转所形成的规则椭球体,这个椭球体 称为地球椭球体。
地球椭球体表面是一个规则数学表面,可用数学公式表达,所以在测 量和制图中用它替代地球的自然表面
面上半径最大的圆,叫做大圆
• 地球表面两点间沿大圆连接的弧线 为最短距离
B
二、地面方向
地球上的坐标给出了一个点的位置
每一点相对于另一点的角度关系可以用方向来表示
方向是导航中最基本的一个量
N
B
A
二、地面方向
地面真地平平面
地面方向是在测者地面真地平平面确定的 通过测者A的眼睛并与测者铅垂线AO正交的平面称为 测者地面真地平平面(可简称为地平面)
大地水准面与地球椭球
大地水准面(物理表面)
大地水准面所包围的球体称为 大地体。
大地体是地球形状的一级逼近
大地水准面是测量的基准面 地球内部物质分布的不均匀性, 它实际是一个起伏不平的重力 等位面, 因此,大地水准面也 是一个起伏不定的不规则曲面, 它也不能作为导航数学计算和 制图的基准面