实时运动目标检测与跟踪平台的构建
多摄像机视频监控中运动目标检测与跟踪

多摄像机视频监控中运动目标检测与跟踪多摄像机视频监控中运动目标检测与跟踪近年来,随着安防技术和计算机视觉的发展,多摄像机视频监控系统在各个领域得到了广泛应用。
多摄像机视频监控系统采用多个摄像机同时监测同一个区域,可以提高监控的全面性和准确性。
然而,在这种系统中,大量的视频数据使得人工分析和处理变得困难和耗时。
因此,如何有效地进行运动目标检测与跟踪成为了研究的热点之一。
多摄像机视频监控系统中的运动目标检测与跟踪涉及到多个步骤,包括背景建模、目标检测、目标特征提取、目标跟踪等。
在背景建模阶段,需要通过对摄像机采集到的视频序列进行分析,提取场景的静态背景信息。
常用的背景建模方法有基于帧差法和基于聚类法等。
帧差法通过计算相邻两帧像素差异来得到目标的前景区域,而聚类法则通过对像素进行聚类来判断是否为目标。
这些方法可以较好地适应场景变化并获取较为准确的背景信息。
接下来,目标检测是通过将前景区域与背景进行对比来得到运动目标的方法。
常用的目标检测算法有基于混合高斯模型和基于自适应阈值的方法。
这些方法可以对目标进行初步的检测和分割。
然后,在目标特征提取阶段,需要从检测到的目标中提取出有用的特征。
例如,颜色、纹理、形状等特征可以用于目标识别和分类。
最后,在目标跟踪阶段,需要通过将目标的位置和运动轨迹进行精确计算和预测,从而进行目标的跟踪和定位。
在多摄像机视频监控中,由于摄像机的数量增加,场景复杂程度提高,造成了更大的挑战。
首先,摄像机之间存在视角差异,导致目标在不同摄像机视野中的外观和尺度变化。
为了解决这个问题,可以通过利用摄像机之间的几何关系来进行目标的位置和尺度的校正。
其次,多摄像机视频监控系统中的目标通常是多个摄像机录制的视频中的同一个目标。
因此,目标的跟踪需要在多个摄像机之间进行协同。
为了解决这个问题,可以通过利用目标的外观和运动信息来进行目标的匹配和关联。
最后,多摄像机视频监控系统需要将多个摄像机的视频数据进行融合和整合。
健康监测平台策划书3篇
健康监测平台策划书3篇篇一《健康监测平台策划书》一、引言随着人们对健康关注度的不断提高,健康监测成为了当今社会的重要需求。
本策划书旨在构建一个全面、高效的健康监测平台,为用户提供个性化的健康管理服务,帮助用户实时了解自身健康状况,预防疾病,提高生活质量。
二、平台目标1. 提供准确、实时的健康数据监测,包括但不限于心率、血压、血糖、睡眠等指标。
2. 基于监测数据进行分析,个性化的健康报告和建议,指导用户进行健康管理。
3. 建立用户健康档案,方便用户随时查看历史数据和健康趋势。
4. 提供健康咨询和互动社区,促进用户之间的交流和分享经验。
5. 与医疗机构和医生进行对接,提供远程医疗服务,方便用户就医。
三、平台功能设计1. 健康数据采集支持多种健康监测设备的数据接入,如智能手环、血压计、血糖仪等。
设备与平台之间通过蓝牙、Wi-Fi 等无线技术进行连接,实现数据的自动传输和同步。
用户可以手动录入一些健康数据,如饮食、运动等信息。
2. 数据分析与报告运用先进的数据分析算法,对采集到的健康数据进行分析和处理。
详细的健康报告,包括各项指标的评估、健康风险提示、个性化的健康建议等。
报告以图表、文字等形式呈现,易于用户理解和解读。
3. 健康管理功能根据健康报告和建议,为用户制定个性化的健康管理计划,包括饮食调整、运动建议、作息规律等。
支持用户自定义健康目标,如减肥、增肌等,平台会根据目标进行跟踪和评估。
4. 用户健康档案建立用户的健康档案,存储用户的基本信息、健康数据、历史报告等。
档案具有保密性和安全性,只有用户本人能够访问和管理。
支持数据备份和恢复功能,防止数据丢失。
5. 健康咨询与互动社区设立专业的健康咨询团队,为用户提供在线咨询服务,解答健康问题。
建立互动社区,用户可以在社区中发布健康话题、分享经验、交流心得,与其他用户互动。
社区中还可以开展健康讲座、培训等活动,提高用户的健康知识水平。
6. 远程医疗服务与医疗机构和医生进行合作,建立远程医疗服务平台。
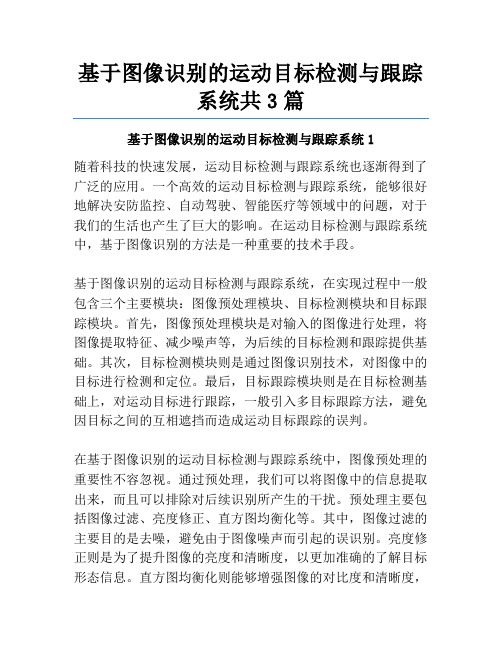
基于DSP视频运动目标的实时检测与跟踪系统研究

, 和 1+ ,- 1 F …, -I 两类( 分别 较差 ; 帧间差法的原理和算法 比较简单, 易于实现 素分为 C 1 D C + 2-’ ) 且实时性好, 处理速度快 , 对光照变化不大 , 图像 代表目标与背景) 。那么 ,。 c 类出现概率及均 c和 受噪声污染严重小的动 目标检测效果好。 值 分别 为 : 利用 T 公司高性能 DM 4 I 6 2专用图像处理 ∑ p = ( f ) 平台及合适算法,设计一应用于停车场车辆无人 l ( 一 f ’ f1 2 监控系统 , 以防车辆被盗事故的发生。
, 、
跟踪 方法 有 : 门 跟踪 目光 流 法 K l n滤 波 跟 波 , 、a ma
类 别方 差 自动 门 限法 由 O t 最小 二乘法 s u在
图 1系统 硬件 框 图
踪日主动 轮廓线跟 踪日模 板匹配 跟踪 阳多模 跟踪 原理的基础上导出。首先 , 、 、 如果图像的灰度级范围 法H 一些新算法如: ’ 等。 小波算法, 遗传算法等也备 是 01 … 1 ,2 , ,设灰度级 j 的像素点个数为 I. T, I图
关键 词 : MS 2 D 4 ; T 3 O M6 2 目标 检 测 ; 别 方 差 自动 门限采用灰度阀值法进行图 运动 目 的智能检测与跟踪是图像处理领 像分割 , 标 选取合适 阈 , 值 将图像 中的目 标和背景分 从而确定 目标的大致位置。公式如下 : 域的重要课题 , 在现代化武器战争中和民用上 , 割开来, 如: 机器人 、 交通监控 , 银行监控系统等 , 都发挥着 【 1crn (Y J kod当 ) T( bf , ,< am u g ) v> 巨大作用。 T为阈值,使用类别方差 自动门限法确定 T 目前, 常用的运动 目标检测方法有 : 帧差法m 、 背景减法日块匹配法日 、 . 光流法 运动能量法 的大小 。 等;
基于OpenCV的运动目标检测与跟踪的开题报告

基于OpenCV的运动目标检测与跟踪的开题报告1.问题描述动态目标检测与跟踪是计算机视觉领域的重要研究方向之一,其应用范围涉及视频监控、智能交通、人机交互等领域。
然而,传统方法对于场景复杂、目标运动快速、遮挡等情况处理效果不佳,需要更高精度、更高效率的算法解决这些问题。
2.研究目标本研究拟使用OpenCV库,运用图像处理、计算机视觉、机器学习等方法,实现运动目标的检测与跟踪,达到以下目标:(1)快速准确地检测运动目标,识别目标的运动轨迹;(2)针对遮挡、光照变化等问题,采用定位、成像、跟踪等多种策略,提高目标检测的精度;(3)针对运动目标的运动速度、方向等多种属性,进行多角度、综合性的分析和研究,建立适用于实际应用的算法。
3.研究方法和技术路线(1)建立视频采集平台。
使用摄像机获取实时视频流,并对数据进行采集、预处理,并应用OpenCV库实现视频流后处理。
(2)建立运动目标检测算法。
运用图像处理算法进行前景/背景分类、形态学滤波等操作,采用一系列特征提取的方法刻画像素点的特征,采用分类器实现目标检测。
(3)针对复杂场景、遮挡等问题,采用多特征、多分类器等方法进行重新整合,进一步提高算法准确度。
(4)建立运动目标跟踪算法。
根据检测结果,利用卡尔曼滤波、粒子滤波等跟踪方法对运动目标进行跟踪。
(5)建立性能评估体系,基于指标和实际应用场景对所研发算法进行综合性评估。
4.预期结果基于OpenCV库进行运动目标检测与跟踪,在实验室实现的基础上,进行测试、优化,结合现有开源算法,最终达到高精度、高效率的运动目标检测与跟踪效果,具体评估指标包括精度、召回率、信噪比等。
同时,根据实际应用场景,通过算法参数的调整,进一步将算法实现优化,使其适用于各种应用场景。
《智能监控系统中运动目标的检测与跟踪》范文

《智能监控系统中运动目标的检测与跟踪》篇一一、引言随着科技的不断进步,智能监控系统在安全、交通、医疗等领域得到了广泛应用。
其中,运动目标的检测与跟踪是智能监控系统中的关键技术之一。
本文旨在深入探讨智能监控系统中运动目标的检测与跟踪方法及其应用。
二、运动目标检测技术1. 背景与意义运动目标检测是智能监控系统的基础,其目的是从视频序列中提取出感兴趣的运动目标。
该技术对于后续的目标跟踪、行为分析、目标识别等具有重要意义。
2. 常用方法(1)基于帧间差分法:通过比较视频序列中相邻两帧的差异,检测出运动目标。
该方法简单有效,但易受光照变化、噪声等因素影响。
(2)基于背景减除法:利用背景模型与当前帧进行差分,从而提取出运动目标。
该方法对动态背景具有较好的适应性,但需要预先建立准确的背景模型。
(3)基于深度学习方法:利用深度学习技术对视频进行目标检测,如基于卷积神经网络的目标检测算法。
该方法具有较高的检测精度和鲁棒性。
三、运动目标跟踪技术1. 背景与意义运动目标跟踪是在检测出运动目标的基础上,对其在连续帧中的位置进行估计和预测。
该技术对于提高监控系统的实时性和准确性具有重要意义。
2. 常用方法(1)基于滤波的方法:如卡尔曼滤波、粒子滤波等,通过建立目标运动模型,对目标位置进行预测和更新。
(2)基于特征匹配的方法:利用目标的形状、颜色等特征,在连续帧中进行匹配,从而实现目标跟踪。
(3)基于深度学习的方法:利用深度学习技术对目标进行识别和跟踪,如基于孪生神经网络的目标跟踪算法。
该方法具有较高的跟踪精度和鲁棒性。
四、智能监控系统中运动目标检测与跟踪的应用1. 安全监控领域:通过智能监控系统对公共场所、住宅小区等进行实时监控,及时发现异常情况,提高安全性能。
2. 交通管理领域:通过智能监控系统对交通流量、车辆行为等进行实时监测和分析,为交通管理和规划提供支持。
3. 医疗领域:在医疗领域中,智能监控系统可以用于病人监护、手术辅助等方面,提高医疗质量和效率。
视频监控中的运动目标检测与跟踪

视频监控中的运动目标检测与跟踪随着科技的不断发展,视频监控系统在我们生活中起到了越来越重要的作用。
其中,运动目标检测与跟踪是视频监控系统中的关键技术之一。
本文将详细介绍视频监控中的运动目标检测与跟踪的原理和应用。
在视频监控系统中,运动目标指的是图像序列中不断变化的区域,例如人、车辆等。
而运动目标检测与跟踪则是指在视频中自动识别和跟踪这些运动目标的过程。
首先,运动目标检测是指在视频序列中找出运动目标所在的位置。
常见的运动目标检测算法包括帧间差、光流法和背景建模等。
帧间差方法通过比较连续帧之间的像素差异来检测目标的运动。
光流法则利用像素间的灰度变化来估计运动目标的移动。
背景建模则通过建立静止背景图像来检测运动目标。
其次,运动目标跟踪是指在检测到的运动目标中,跟踪其运动轨迹并实时更新位置信息。
常见的运动目标跟踪算法包括卡尔曼滤波器、粒子滤波器和相关滤波器等。
卡尔曼滤波器通过预测和观测更新的方式来估计目标的位置。
粒子滤波器则通过在候选区域中采样来估计目标的位置。
相关滤波器利用目标模板和候选区域之间的相关性来跟踪目标。
在实际应用中,运动目标检测与跟踪技术被广泛应用于视频监控系统中。
首先,它可以用于实时监测人员和车辆的行为,以便及时发现异常情况。
例如,当有人携带危险物品进入监控区域时,系统可以立即发出警报并采取相应措施。
其次,它可以用于交通管理系统中,监测交通流量和违规行为。
例如,当有车辆逆向行驶或超速行驶时,系统可以自动拍摄照片或录像作为证据。
此外,运动目标检测与跟踪技术还可用于视频分析和智能监控系统中,为用户提供更加智能的安防服务。
然而,运动目标检测与跟踪技术也存在一些挑战和局限性。
首先,复杂的背景和光照变化会对运动目标检测产生干扰。
例如,当目标混杂在复杂的背景中时,算法往往会出现误检测现象。
其次,目标遮挡和形状变化也会对运动目标跟踪产生困难。
例如,当目标部分被其他物体遮挡时,算法往往会失去目标的轨迹。
《2024年智能监控系统中运动目标的检测与跟踪》范文
《智能监控系统中运动目标的检测与跟踪》篇一一、引言随着科技的不断进步,智能监控系统在各个领域得到了广泛的应用。
其中,运动目标的检测与跟踪是智能监控系统中的关键技术之一。
本文将详细介绍智能监控系统中运动目标的检测与跟踪技术,包括其基本原理、实现方法、应用场景以及面临的挑战和解决方案。
二、运动目标检测技术1. 背景介绍运动目标检测是智能监控系统中的第一步,它的主要任务是在视频序列中准确地检测出运动目标。
运动目标检测的准确性与实时性直接影响到后续的跟踪、识别、分析等任务。
2. 基本原理运动目标检测的基本原理是通过分析视频序列中的像素变化来检测运动目标。
常见的运动目标检测方法包括帧间差分法、背景减除法、光流法等。
其中,背景减除法是目前应用最广泛的方法之一。
3. 实现方法背景减除法通过建立背景模型,将当前帧与背景模型进行差分,得到前景掩膜,从而检测出运动目标。
实现过程中,需要选择合适的背景建模方法、更新策略以及阈值设定等。
三、运动目标跟踪技术1. 背景介绍运动目标跟踪是在检测出运动目标的基础上,对其在连续帧中的位置进行估计和预测。
运动目标跟踪对于实现智能监控系统的自动化、智能化具有重要意义。
2. 基本原理运动目标跟踪的基本原理是利用目标在连续帧中的相关性,通过一定的算法对目标进行定位和跟踪。
常见的运动目标跟踪方法包括基于滤波的方法、基于特征的方法、基于深度学习的方法等。
3. 实现方法基于深度学习的运动目标跟踪方法是目前的研究热点。
该方法通过训练深度神经网络来学习目标的外观特征和运动规律,从而实现准确的跟踪。
实现过程中,需要选择合适的神经网络结构、训练方法和损失函数等。
四、应用场景智能监控系统中的运动目标检测与跟踪技术广泛应用于各个领域,如安防监控、交通监控、智能机器人等。
在安防监控中,该技术可以实现对可疑目标的实时监测和报警;在交通监控中,该技术可以实现对交通流量的统计和分析,提高交通管理水平;在智能机器人中,该技术可以实现机器人的自主导航和避障等功能。
运动目标控制与自动追踪控制系统设计流程
运动目标控制与自动追踪控制系统设计流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor.I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!运动目标控制与自动追踪控制系统设计流程详解在现代科技领域,运动目标控制与自动追踪控制系统是不可或缺的一部分,广泛应用于无人机、机器人、安防监控等领域。
基于OpenMV的运动目标控制和自动追踪系统的设计
基于OpenMV的运动目标控制和自动追踪系统的设计目录1. 内容描述 (2)1.1 系统背景及意义 (3)1.2 系统目标和功能需求 (4)1.3 系统组成和原理介绍 (5)2. 系统硬件平台 (6)3. 软件设计与实现 (7)3.1 系统软件架构设计 (8)3.2 运动目标检测算法分析 (9)3.2.1 背景减持算法 (10)3.2.2 形态学分析算法 (11)3.2.3 跟踪算法介绍 (12)3.3 OpenMV开发环境搭建 (13)3.4 串口通信协议设计 (15)3.5 上位机控制软件设计与实现 (17)4. 系统调试与测试 (18)4.1 单元测试 (20)4.2 集成测试 (20)4.3 应用场景测试 (22)4.4 测试结果分析 (23)5. 系统性能分析 (24)5.1 实时性与精度分析 (26)5.2 功耗与稳定性分析 (27)5.3 可扩展性与应用扩展 (29)6. 结论与展望 (30)6.1 总结主要研究成果 (31)6.2 存在问题及改进方向 (32)6.3 未来发展趋势 (33)1. 内容描述本文档旨在详细介绍基于的运动目标控制和自动追踪系统的设计与实现。
该系统结合了先进的计算机视觉技术和机器学习算法,实现对动态目标的实时跟踪与控制。
系统首先通过视觉传感器获取视频流,并利用其内置的物体检测功能对运动目标进行实时检测和定位。
通过图像处理和分析,提取出目标的关键特征,如形状、颜色、运动轨迹等。
在此基础上,系统采用先进的运动目标控制算法,包括目标预测、路径规划和运动控制等模块。
这些模块协同工作,实现对目标运动的精确跟踪和控制。
生成相应的控制指令并发送给执行机构,实现对目标的精确追踪。
此外,系统还具备自动追踪和异常处理功能。
在目标失去跟踪时,系统能够自动重新检测和定位目标,并重新规划跟踪路径。
同时,系统还具备一定的异常处理能力,能够应对光照变化、遮挡、目标突然移动等特殊情况,保证系统的稳定性和可靠性。
《智能监控系统中运动目标的检测与跟踪》范文
《智能监控系统中运动目标的检测与跟踪》篇一一、引言随着科技的快速发展,智能监控系统在各个领域得到了广泛应用。
其中,运动目标的检测与跟踪是智能监控系统的核心技术之一。
本文将详细探讨智能监控系统中运动目标的检测与跟踪技术,包括其基本原理、应用场景、算法实现以及面临的挑战和未来发展方向。
二、运动目标检测与跟踪的基本原理运动目标检测与跟踪是利用计算机视觉和图像处理技术,从监控视频中提取出运动目标,并对其进行连续跟踪的过程。
其基本原理包括运动目标检测、特征提取、目标匹配与跟踪等步骤。
1. 运动目标检测:通过分析视频序列中的像素变化,检测出运动目标。
常用的方法包括背景减除法、光流法、帧间差分法等。
2. 特征提取:从检测到的运动目标中提取出有用的特征信息,如形状、颜色、纹理等。
这些特征信息将用于后续的目标匹配与跟踪。
3. 目标匹配与跟踪:利用提取的特征信息,在连续的视频帧中对运动目标进行匹配与跟踪。
常用的算法包括基于滤波的方法、基于模型的方法、基于深度学习的方法等。
三、运动目标检测与跟踪的应用场景运动目标检测与跟踪技术在智能监控系统中有着广泛的应用场景。
以下是几个典型的应用场景:1. 交通监控:通过检测与跟踪道路上的车辆和行人,实现交通流量统计、违章行为识别等功能。
2. 公共安全:在公共场所安装监控系统,实时检测与跟踪可疑人员,提高安全防范能力。
3. 智能安防:通过检测与跟踪家庭或企业的出入人员,实现智能安防报警功能。
4. 体育赛事:在体育赛事中,通过检测与跟踪运动员的轨迹,为教练员提供实时数据分析,帮助制定更科学的训练计划。
四、算法实现运动目标检测与跟踪的算法实现主要包括以下几个步骤:1. 预处理:对原始视频进行去噪、增强等预处理操作,提高后续处理的准确性。
2. 运动目标检测:采用背景减除法、光流法或帧间差分法等方法,从视频中检测出运动目标。
3. 特征提取:从检测到的运动目标中提取出有用的特征信息,如形状、颜色、纹理等。
《2024年基于OPENCV的运动目标检测与跟踪技术研究》范文
《基于OPENCV的运动目标检测与跟踪技术研究》篇一一、引言随着计算机视觉技术的飞速发展,运动目标检测与跟踪技术已经成为计算机视觉领域研究的热点。
该技术广泛应用于智能监控、交通流量管理、人机交互等众多领域。
OpenCV作为一个强大的计算机视觉库,为运动目标检测与跟踪提供了有效的工具。
本文旨在研究基于OpenCV的运动目标检测与跟踪技术,探讨其原理、方法及实际应用。
二、运动目标检测技术研究1. 背景及原理运动目标检测是计算机视觉中的一项基本任务,其目的是从视频序列中提取出运动的目标。
OpenCV提供了多种运动目标检测方法,如背景减除法、光流法、帧间差分法等。
其中,背景减除法是一种常用的方法,其原理是将当前帧与背景模型进行比较,从而检测出运动目标。
2. 关键技术与方法(1)背景建模:背景建模是运动目标检测的关键步骤。
OpenCV提供了多种背景建模方法,如单高斯模型、混合高斯模型等。
其中,混合高斯模型能够更好地适应背景的动态变化。
(2)阈值设定:设定合适的阈值是运动目标检测的重要环节。
阈值过低可能导致误检,阈值过高则可能导致漏检。
OpenCV通过统计像素值分布,自动设定阈值,从而提高检测的准确性。
3. 实验与分析本文通过实验对比了不同背景建模方法和阈值设定对运动目标检测效果的影响。
实验结果表明,混合高斯模型结合合适的阈值设定能够获得较好的检测效果。
此外,本文还对不同场景下的运动目标检测进行了实验,验证了该方法的稳定性和泛化能力。
三、运动目标跟踪技术研究1. 背景及原理运动目标跟踪是指在视频序列中,对检测到的运动目标进行持续跟踪。
OpenCV提供了多种跟踪方法,如光流法、Meanshift 算法、KCF算法等。
这些方法各有优缺点,适用于不同的场景和需求。
2. 关键技术与方法(1)特征提取:特征提取是运动目标跟踪的关键步骤。
OpenCV可以通过提取目标的颜色、形状、纹理等特征,实现稳定的目标跟踪。
此外,还可以采用深度学习等方法,提取更高级的特征,提高跟踪的准确性。
智能嵌入式目标检测及跟踪系统的设计与实现
智能嵌入式目标检测及跟踪系统的设计与实现智能嵌入式目标检测及跟踪系统的设计与实现随着人工智能技术的不断发展和嵌入式系统的普及应用,智能嵌入式目标检测及跟踪系统成为了当前热门的研究领域。
本文将介绍一个基于嵌入式平台的智能目标检测及跟踪系统的设计与实现。
一、引言目标检测及跟踪技术在很多领域具有广泛的应用,如智能监控、智能安防、自动驾驶等。
传统的目标检测及跟踪算法需要使用高性能的计算机进行处理,且无法满足实时性的要求。
而嵌入式系统具有体积小、功耗低、性能高等优势,能够满足智能目标检测及跟踪系统的需求。
二、系统设计1. 系统硬件设计该系统硬件部分主要包括嵌入式开发板、摄像头、存储器等。
嵌入式开发板需要具备足够的计算能力和接口能力,能够支持实时的图像处理。
选择合适的摄像头模块用于采集图像数据,并通过存储器存储采集到的数据,以便后续处理。
2. 系统软件设计(1)图像采集与预处理通过摄像头采集图像数据,并对采集到的图像进行预处理,包括去噪、图像增强等操作,以提高后续目标检测和跟踪算法的准确性。
(2)目标检测目标检测是整个系统的核心部分,目前常用的目标检测算法有Haar特征检测、HOG特征检测和深度学习等。
根据算法选择合适的模型进行训练,并在目标检测网络中提取特征,通过特征匹配和分类判断出目标的位置。
(3)目标跟踪目标跟踪是在目标检测的基础上,对目标进行持续的追踪操作。
常用的目标跟踪算法有卡尔曼滤波、粒子滤波等。
在目标跟踪过程中,结合目标的运动模型和观测特征进行目标位置的预测和修正,以实现对目标的准确跟踪。
(4)结果展示与输出最后,将目标检测和跟踪的结果通过显示设备进行展示,可以选择将目标位置标注在图像上,也可以输出目标的跟踪轨迹等信息,以便用户观看和分析。
三、系统实现在系统实现过程中,我们选择了一款性能较高的嵌入式开发板,并通过集成的摄像头模块进行图像采集;采用Haar特征检测算法进行目标检测,并结合卡尔曼滤波算法进行目标跟踪;最后,将处理后的图像通过显示设备输出。
运动目标跟踪系统的设计与实现
华中科技大学硕士学位论文摘要目标检测和跟踪有很多的应用领域,包括智能交通网、视频内容分析和目标行为理解等。
MMDTS(Mulitple Moving Object Detection and Tracking System)是我们研究的一个对于多个运动目标检测和跟踪的系统。
它采用混合高斯模型建立背景模型,通过连通成分分析和前景区域上的角点检测分别获得团特征和角点特征,接着采用一个多层次级别的跟踪策略来稳定的跟踪独立目标。
最后,扩展的应用系统还具备目标跟踪轨迹自动记录,人车流量统计,车辆逆向行驶警告等功能。
本文所做的研究工作主要有MMDTS系统的设计与实现,和在此基础上的三个扩展应用功能的实现。
MMDTS系统包括背景建模,特征提取,特征跟踪和预测模型部分。
特征提取和预测模型选用了较为常用和成熟的技术来实现,背景建模和特征跟踪是本文研究的重点。
在背景建模部分,本文在经典的混合高斯背景建模方法的基础上,加入了光线矫正和HSV颜色空间中阴影去除的考虑。
在特征跟踪部分,本文设计了一个多层次级别的跟踪策略,分别在团特征、独立目标特征、角点特征上的匹配跟踪。
三层级别的跟踪信息彼此交互和利用,使得跟踪能够适应实际的各种情况,具备真正意义的实际应用。
MMDTS已经在多个数据库上测试,在检测和跟踪目标上均有较好的表现,能适应场景光线的变动,在目标与目标之间出现交叉时也依然能跟踪独立目标。
然而系统也有不足之处,例如对于首次出现就交叠在一起的几个独立目标,系统会将它们作为一个整体跟踪直到它们分离。
最后,扩展的应用系统还具备目标轨迹自动记录,人车流量统计,车辆逆向行驶警告等功能。
关键词:混合高斯阴影检测目标检测角点检测目标跟踪华中科技大学硕士学位论文AbstractObject detection and tracking has many applications in some area, including intelligent transport network, video content analysis and object behavior understanding. MMDTS is our system to detect and track multiple moving objects. In our systrem, a mixture gaussian is used to model the background. Then, blob features are grouped by using connected component label method and corner features are obtained by corner detection in the foreground. Finally, a multi-level feature tracking strategy is used to track independent object stably. Also, our extended system has three applications, object tracking recording, people and vehicle counting and vehicle reverse traveling warning.This paper's main research work is to design and implement the MMDTS system and three extended applications. MMDTS system is content of background model, feature extraction, feature tracking and prediction model. We select common and mature technology for the feature extraction and prediction model. Background model and feature tracking are the focus of the paper. Based on Mixed Gaussian Model we have two cosiderations, luminous correction and shadow removal in HSV color space to modeling the background. In the feature tracking part, we design a multi-level tarcking straegy to tracking independent object by matching blob feature, independent object feature and corner feature. Three levels of tracking information are used interact with each other, and it can adapt variety situations in practical. This means it has real application.MMDTS has been tested in multiple databases, and it has well performance in both detection and tracking objects. It can adapt luminous change and handle objects crossing. However, the system also has some shortcomings, such as objects overlaped at first time would be tracked as one independent object. Also, our extended system has three applications, object tracking recording, people and vehicle counting and vehicle reverse traveling warning.Keyword: Mixture Gaussian Model Shadow Detection ObjectDetection Corner Detection Object Tracking独创性声明本人声明所呈交的学位论文是我个人在导师指导下进行的研究工作及取得的研究成果。
基于高速球形摄像机的运动目标检测与实时跟踪系统
Absr c A ys e f r a om a i t c i n r a —r ck n he m ov n a g s be n d sgn s d on hih ta t s t m o ut tc de e tng a d e lt a i g t i g t r etha e e i ed ba e g
目标 的快 速 准 确 的 实 时 跟踪 . 艾 立 克 一 体 化 球 形 摄 像 机 上 进 行 了 实 验 , 证 了本 系统 的 有效 性. 在 验 关键 词 高速 球 形 摄 像 机 ; 合 高 斯 模 型 ; a hf 算 法 ; 混 C mS i t 目标 检 测 和 跟 踪
TP3 1 4 文 献标 识 码 A 文章 编号 1 7 — 3 1 2 1 ) 2 0 8 — 4 9 . 6 2 4 2 ( 0 O 0 — 0 0 0 中 图分 类 号
Ga sa us in,an he c nt o d oft s r gi sde e m i d a he c nt rofi taii g w i ow o r c ng. The h d t e r i hi e on i t r ne s t e e nii lzn nd f rt a ki n te c l r f a ur a g ti h e o s e r t d a heCa Shita g ihm s us d t a c a e t xa tl ato o o e t e oft r e n t e r gin i xtac e nd t m f l ort i e o c lul t he e c oc in
M o i r e t c i nd Tr c i y t m s d o v ng Ta g t De e tng a a k ng S s e Ba e n
基于嵌入式树莓派和OpenCV的运动检测与跟踪系统

基于嵌入式树莓派和OpenCV的运动检测与跟踪系统一、本文概述随着科技的不断进步,嵌入式系统和计算机视觉技术在日常生活、工业生产、安全防护等领域中的应用日益广泛。
其中,基于嵌入式树莓派和OpenCV的运动检测与跟踪系统因其高效、灵活、成本效益高等特点,受到了广大研究者和实践者的青睐。
本文旨在探讨如何利用树莓派这一强大的微型计算机和OpenCV这一开源的计算机视觉库,实现运动目标的检测与跟踪,并为此提供一个完整的系统设计、实现与测试方案。
本文首先将对嵌入式树莓派和OpenCV进行简要介绍,阐述它们在运动检测与跟踪领域的应用优势和潜力。
接着,将详细介绍系统的硬件组成和软件架构,包括树莓派的选型、摄像头模块的选择、OpenCV 的安装与配置等。
在此基础上,本文将重点讨论运动检测与跟踪算法的选择和实现,包括背景建模、目标提取、目标跟踪等关键技术。
本文还将探讨如何优化系统性能,提高检测与跟踪的准确性和实时性。
这包括算法的优化、硬件资源的合理利用、系统功耗的控制等方面。
本文将通过实际测试案例,验证所设计系统的可行性和有效性,为相关研究和应用提供参考和借鉴。
通过本文的阅读,读者可以全面了解基于嵌入式树莓派和OpenCV 的运动检测与跟踪系统的原理、设计、实现和优化过程,为相关领域的研究和实践提供有益的启示和帮助。
二、系统总体设计基于嵌入式树莓派和OpenCV的运动检测与跟踪系统,主要由硬件层、操作系统层、算法层和应用层四个层次构成。
硬件层以树莓派为核心,辅以摄像头、存储设备等;操作系统层选用基于Linux的树莓派操作系统,提供稳定、高效的运行环境;算法层利用OpenCV库实现运动检测与跟踪的核心算法;应用层则负责与用户交互,展示检测结果并提供控制接口。
树莓派作为本系统的核心硬件,选用具备足够计算能力和IO接口的型号,如Raspberry Pi 4。
摄像头选择高清、低延迟的网络摄像头,以便捕捉清晰、流畅的视频流。
基于图像识别的运动目标检测与跟踪系统共3篇
基于图像识别的运动目标检测与跟踪系统共3篇基于图像识别的运动目标检测与跟踪系统1随着科技的快速发展,运动目标检测与跟踪系统也逐渐得到了广泛的应用。
一个高效的运动目标检测与跟踪系统,能够很好地解决安防监控、自动驾驶、智能医疗等领域中的问题,对于我们的生活也产生了巨大的影响。
在运动目标检测与跟踪系统中,基于图像识别的方法是一种重要的技术手段。
基于图像识别的运动目标检测与跟踪系统,在实现过程中一般包含三个主要模块:图像预处理模块、目标检测模块和目标跟踪模块。
首先,图像预处理模块是对输入的图像进行处理,将图像提取特征、减少噪声等,为后续的目标检测和跟踪提供基础。
其次,目标检测模块则是通过图像识别技术,对图像中的目标进行检测和定位。
最后,目标跟踪模块则是在目标检测基础上,对运动目标进行跟踪,一般引入多目标跟踪方法,避免因目标之间的互相遮挡而造成运动目标跟踪的误判。
在基于图像识别的运动目标检测与跟踪系统中,图像预处理的重要性不容忽视。
通过预处理,我们可以将图像中的信息提取出来,而且可以排除对后续识别所产生的干扰。
预处理主要包括图像过滤、亮度修正、直方图均衡化等。
其中,图像过滤的主要目的是去噪,避免由于图像噪声而引起的误识别。
亮度修正则是为了提升图像的亮度和清晰度,以更加准确的了解目标形态信息。
直方图均衡化则能够增强图像的对比度和清晰度,有助于更好的分析图像信息。
在目标检测模块中,图像识别是一个重要的技术手段。
通常情况下,图像识别需要先通过选定合适的物体检测算法进行初步的识别工作,如Viola-Jones算法、HOG+SVM算法等。
通过此类算法,我们可以对目标进行初步的分类识别,从而为后续的目标检测和跟踪提供基础。
在初步识别的基础上,可以引入卷积神经网络(CNN)等更深层次的神经网络进行目标特征提取,提高识别准确率。
实际应用中,目标跟踪模块的效果往往受到多种因素的影响,如目标姿态、光照等,而且多目标跟踪算法则更加复杂。
基于人工智能的视频监控系统的实时目标检测与追踪

基于人工智能的视频监控系统的实时目标检测与追踪随着科技的发展和人工智能技术的不断进步,视频监控系统在公共安全、交通管理等领域扮演着越来越重要的角色。
而其中最关键的功能之一就是实时目标检测与追踪。
本文将探讨基于人工智能的视频监控系统如何实现实时的目标检测与追踪,并讨论其应用和挑战。
目标检测是指从视频流中识别和定位特定对象的过程。
而目标追踪是在目标检测的基础上,通过持续的视频帧来跟踪目标的位置和运动轨迹。
基于人工智能的视频监控系统可以借助深度学习算法,通过学习大量的训练数据来自动地分析和识别视频中的目标,实现目标检测和追踪的功能。
首先,基于人工智能的视频监控系统需要具备强大的计算能力和高效的算法。
目前常用的深度学习算法,如卷积神经网络(CNN)和循环神经网络(RNN),在目标检测和追踪领域取得了巨大的进展。
这些算法需要运行在高性能的计算平台上,如GPU集群,以实现实时的目标检测和追踪。
其次,视频监控系统需要具备高质量的监控摄像头和图像传感器。
这些设备应具备高清晰度、广角视野和低光强度拍摄能力,以获取清晰、准确的视频流。
同时,视频流的实时传输也需要具备较高的带宽和稳定的网络连接,以确保视频监控系统能够在实时情况下进行目标检测和追踪。
此外,基于人工智能的视频监控系统还需要进行大规模的数据收集和标注。
目标检测和追踪算法需要通过大量的训练数据进行学习和训练,以提高其准确性和鲁棒性。
这些数据需要包含各种不同的目标类别和运动模式,以确保算法可以适应各种场景和复杂的环境。
基于人工智能的视频监控系统的应用非常广泛。
在公共安全领域,它可以用于监测和追踪可疑行为或犯罪活动,及时提供预警和响应。
在交通管理领域,它可以用于实时监控和控制交通流量,减少交通事故和拥堵。
在工业生产领域,它可以用于监测和优化生产过程,提高生产效率和质量。
然而,基于人工智能的视频监控系统也面临一些挑战。
首先,随着技术的发展,目标检测和追踪算法需要不断地更新和优化,以适应新的场景和对象。
基于Matlab实时运动目标跟踪检测系统
et ai ,iae sg ett nad ojcsdtci n rc i l r h s p ee pd T emoi bet a en scesuy dtce n si t n m g e m nai n b t eetg ad tak g a oi m ae dvl e. h v g ojcs hsbe ucs l eetd ad m o o e n n g t o n fl
CI I Jrl 薹ቤተ መጻሕፍቲ ባይዱ ' _薹 | £ 鼍
S 戢 l 』置 Y l 置I
基 于 Malb实 时运 动 目掠 娘 昧 捡 阅 系 统 t a
汪惠兰 ,林 航 飞,李赔龙
( 同济大 学 交通 运输 与工 程学 院 ,上海 2 10 ) 08 4
摘 要 :运动 目标的检 测跟 踪是视频理解技术和计算机视 觉的研 究热点 ,其在解 决智 能视频监控 ,人机 交互 ,智 能交通 系统
行分 析理 解 ,并 以 此为基 础 对视 频 监控 系统 进 行控 制 ,从而 使视 频 监控 系统具 有 类似 人类 的 智能 。智 能 监控 系统 可 以主 动地 对监 控 现场 中的 目标进 行 自
动 的检 测 跟踪 和分 析 ,使计 算 机能 够 自动地 滤 除掉 用 户不 关 心 的信 息 ,通 过分 析 和理 解视 频 画面 中的
运动目标实时跟踪系统的设计

第2 O卷 第 1 期
20 0 6年 3月
河
海
大
学
常
州
分
校
学
报
V0 .O No 1 12 . Ma .2 o r o6
J OURN AL OF HOHAIUNI VERS CHANGZ I I HOU
文 章 编 号 :0 9 1 3 (0 6 0 — 0 8 0 1 0 — 1 0 2 0 ) 10 2 — 4
运动 目标 实 时跟踪 系统 的设计
孙承志 ,周 军,吴 明英 ,李新 昊
( 海 大 学 机 电工 程 学 院 .江 苏 常 州 2 3 2 ) 河 1 0 2
摘 要 :针 对 目前 运 动 目标 跟 踪 系 统 结 构 庞 大 、 时性 差 等 问 题 , 实 以高 性 能 D P芯 片 T 3 0 6 1 S MS 2 C 4 6为 核 心 处 理 器 .
秒 48 0兆条指 令 ; 0 一个 MAC 乘法 累加器 ) 单个 时钟周期 即可 完成一 次乘 加指令 ; 大 寻址 空 间达到 4G ( 在 最 B.
足 以满 足 巨大 的图像数 据存储 ; 内采 用 哈佛 结构 , 总线 可 同时访 问程 序 C c e和数 据 C e 2个 外部 片 2套 ah ah ;
F LAS H 2 M B CEl CEO l 6
S AMA I S AMB } C 0 DR l DR E
3 MB 2 I l
1E1 0 P K5
VI DEO l 6
_ _ 一
l MB r—一 6
l 6
。。●一
+o T l —u — _ _] B 84 T6 l lI 6 v D oE c D Rr —_ I E N O E — _ 1
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
研 究提 供 了一 个 实用 的 实验 平 台 。
关键 词 :智能视 频技 术 ;复杂环境 ;运动检 测 ;目标跟 踪 ;实验 平 台 中图分类 号 :T 3 9 P 1 文 献标志 码 :A 文章编 号 :1 0 — 6 5 2 1 ) 10 9 . 3 0 1 3 9 ( 0 1 O —3 8 0 d i1 .9 9 ji n 10 —6 5 2 1 . 1 12 o :0 3 6 / . s.0 1 9 . 0 10 . 1 s 3
目前 , 随着以摄像机为主的图像传感 器在生产生活中的普 及 和广泛应用 , 智能视频技术 已经成为计算机视觉和图像模 式
识 别 的研 究 热 点 和 前 沿 课 题 。智 能 视 频 技 术 借 助 计 算 机 强 大 的数 据 处 理 能 力 , 过 对 视 频 图 像 中 海 量 数 据 的 分 析 和 处 通
r n n sba e n i g rb c r I p e e td a e lz d a lo ih ba e n h lto m fi p o e tci g mo i g o me t s d o ma e g a a d. t r s n e nd ra ie n ag rt m s d o t e p afr o r v ddee tn vn m
第2 8卷 第 1期
21 0 1年 1月
计 算 机 应 用 研 究
Ap l a in Re e r h o o u e s p i t s a c f C mp tr c o
V0 . 8 No 1 12 .
J n 2 1 a. 0 1
实 时 运 目标 检 测 与 跟 踪 平 台 的构 建 术 动
C nt cino lt r o el i emoigojc dtcina dt c ig o s u t fpaf m fr a—m vn bet eet n akn r o o r t o r
JA H n — i , O X a —o H N Tejn I o gbn MA io ,C E i- b u
o jc, n a ea vna e o b t f me iee c to n ak ru dd f e c e o d p m l h n b t a di h dt d a t s f o a — f rn e h da db c g n ie n em t dt a at oc pe c a — e t h g hr df me o fr h t o x g g e v o m ns h x e m na rs l h w temoig ojc c n b e ce n rc e uc l a d e c n y i i ni n et n r .T e ep r e t eu sso h vn b t a e d t tda d t k d q i y n f i t n i l t e e a k i el ca ̄n ee ytepeetda oi m b sdo eb i paom, n rci l xei et lf rv e r hn gs ns rsne l rh ae nt ul ltr adapat a epr na pa o i poi df c b h g t h t f c m l tr s m d o
1 运动 目标 检 测与跟 踪 系统硬 件组成
运动 目标检测 与 跟踪 系统 主要 由计算 机 、 图像 采集 卡和 C D摄像机组成 。C D摄 像机 负责 视频 图像 的采集 , 通过 C C 并 图像采集卡传送 到计算机 , 计算机安装有设计好的软件对 图像 数 据进行分析处理 , 进而对运动 目标进行检测和跟踪。系统结
( colfEetcl n i eig Z egh uU i rt, hazo 50 1 hn ) Sho l ra gn r , hnzo nv sy Z eghu4 0 0 ,C i o ci E e n ei a
A s a t hs a e c n t ce nep r e t l fr r e l i em v gojc d tc o n akn o pe n i b t c :T i p p r o s u tda x e m n l a om f a t o i b t e t na d rc ig ncm l e v- r r i ap t o r —m n e ei t i x
su y i tlie i e e h l g . t d n elg ntv d o tc noo y
.
K e wor y ds: it lie tv d o tc noo y;c mp e n io me s;mo i ee to n elg n i e e h lg o lx e vr n nt vng d tci n;t r e r c i g; e pei n a lto m a g tta k n x rme t lp afr
贾红宾 , 晓波 , 毛 陈铁军
( 郑州 大学 电气工程 学院 ,郑 州 4 0 0 ) 50 1 摘 要 :构建 了一个基 于 图像 采 集卡的复 杂环境 下 实时运 动 目标检 测 与跟 踪 的 实验 平 台。基 于此 平 台提 出并
实现 了一 种改进 的运 动 目 标检 测 算法 , 它融合 了帧 间差分 法和 背景 差分 法 的优 点 , 以适 应复 杂 环境 的 变化 。 实