基于PSD激光三角测距传感器的最优设计
基于PSD的高速激光距离传感器的信号检测与处理
华中科技大学硕士学位论文基于PSD的高速激光距离传感器的信号检测与处理姓名:莫伟申请学位级别:硕士专业:物理电子学指导教师:杨克成20080524摘要现代工业的飞速发展对距离测量提出了越来越高的要求。
与传统的测量手段不同,高速激光距离传感器可对高速运动中的目标进行非接触、短测程、高精度的距离测量,对于军事和民用范围内的应用都有着重要的研究意义。
本文对高速激光距离传感器的设计进行了论述。
以激光三角法测距作为理论基础,对其理论模型进行了讨论,详细分析了激光三角法的距离计算方法。
在此基础上,对比电荷耦合器件CCD和位置敏感器件PSD的特点和优势,选用PSD作为位置传感器。
根据PSD两极输出电流随光敏面上光斑位置不同而不同这一特点,对装置的信号检测和处理系统进行了深入分析和设计。
传统的PSD信号处理电路采用大量的模拟器件进行信号运算,电路复杂且精度不高。
本文对传统处理方式加以改进,采用数字化的方式对传感器进行设计。
信号检测和处理系统分为电源模块、前置放大电路、数据采集电路和单片机接口电路四个部分。
由于信号源输出信号为一个微弱信号,选定高精度线性电源模块为系统供电。
然后采用电阻结合集成运算放大器实现信号的I/V转换和前置放大。
模拟信号的数字化是系统的关键部分。
课题要求在1~1.5m处对探测目标实现精度为20cm的定距测量,根据这一指标计算选择12位高速A/D芯片实现数据采集。
单片机实现系统的总体控制,包括预置/探测状态选择、A/D控制、信号的计算和预警。
采用普通按键、发光二极管对单片机外围电路进行了设计。
改进传统的平均算法,提出新的算法实现了A/D控制和距离值的计算与预警。
在电路板的设计中采用光电耦合器件、铁氧体磁珠、旁路电容滤波等方式减小了噪声。
文章最后对传感器样机进行了实验分析。
实验采用不同颜色目标、不同光照条件作为对照,证实传感器样机能够完成1~1.5m处目标的定距测量;性能随目标反射率的增加而提高;背景光对探测的影响较小。
基于PSD的光点空间位置测量技术研究
基于PSD的光点空间位置测量技术研究The Research of Light-spot SpatialPosition Measurement TechnologyBased on PSD学科专业:光学工程研究生:李兴达指导教师:黄战华教授天津大学精密仪器与光电子工程学院二零一二年十二月独创性声明本人声明所呈交的学位论文是本人在导师指导下进行的研究工作和取得的研究成果,除了文中特别加以标注和致谢之处外,论文中不包含其他人已经发表或撰写过的研究成果,也不包含为获得天津大学或其他教育机构的学位或证书而使用过的材料。
与我一同工作的同志对本研究所做的任何贡献均已在论文中作了明确的说明并表示了谢意。
学位论文作者签名:签字日期:年月日学位论文版权使用授权书本学位论文作者完全了解天津大学有关保留、使用学位论文的规定。
特授权天津大学可以将学位论文的全部或部分内容编入有关数据库进行检索,并采用影印、缩印或扫描等复制手段保存、汇编以供查阅和借阅。
同意学校向国家有关部门或机构送交论文的复印件和磁盘。
(保密的学位论文在解密后适用本授权说明)学位论文作者签名:导师签名:签字日期:年月日签字日期:年月日摘要位置测量在工业、军事、科研等领域应用广泛,光点的空间位置检测在非接触测量领域有重要的意义,本文针对目前光点空间位置测量方法的不足,结合实际测量需求和测量对象的特点设计了一种基于双PSD的光点空间位置测量系统。
PSD以其响应速度快、信号处理电路相对简单、对光学系统和光源要求不高等优点被广泛应用于光电测量。
该方法基于双目视觉,将光点分别成像在两个二维PSD上,利用PSD的快速响应特性捕捉到高速闪光信号,并将像点的位置以电流形式输出,配合后续的信号处理电路和控制电路对输出信号进行处理和计算,最后得到光点的空间位置。
本文研究内容主要包括以下几个方面:1、进行了系统总体方案设计,达到了设计功能与技术指标。
根据被测对象的特点提出了基于双目视觉的测量方案;2、完成了光电探测与信号处理单元的设计,实现空间光点位置信号的探测。
基于PSD高精度激光位移传感器的设计

基于PSD高精度激光位移传感器的设计摘要:介绍了PSD器件的工作原理,对基于三角法测量原理的传感器主要结构参数进行了分析,给出了设计的传感器外形。
并设计一种含有多种放大倍数的PSD的检测电路,可实现测量中对环境变化的自适应能力。
最后分析了影响传感器测量精度的各种因素,并讨论了消除的方法。
关键词:高精度位移传感器;位位置敏感器件(PSD);激光三角法;发大电路Design and Analysis of High Precision Laser Displacement Sensor Based on Position SensitiveDetector(PSD)Abstract:The operating principle of PSD was introduced briefly.Configuration parameters of laser triangulation sensor were analyzed.The PSD detection circuit with a variety of manifications was designed to achieve the ability of self –adapting .Finally, the variou factors of influencing sensor measurement accuracy and elimination methods were analyzed and discussed.Key words: high precision displacement sensor; position sensitive detector(PSD); laser triangulation ;amplification circut目录1 绪论 (4)2 PSD工作原理及特点 (4)3 结构原理及主要参数分析 (6)3.1结构原理 (6)3.2参数β (7)3.3透镜位置参数s/和s (7)3.4 PSD的倾角α的确定 (8)4 PSD检测电路的设计 (8)4.1信号检测与处理系统方案 (9)4.2前置放大电路 (9)4.2.1前置电路 (10)4.2.2 放大器的选择 (12)4.2.3前置放大电路设计 (12)4.3数据采集电路 (13)4.3.1A/D转换器的选择 (13)4.3.2A/D转换器的数据采集 (14)4.3.3 A/D转换器与单片机的接口 (16)4.4 MCU接口电路与计算、控制程序 (16)4.4.1 MCU选择 (16)4.4.2 MCU接口电路 (18)4.4.3 MCU计算与控制程序 (20)4 激光测距传感器应用于工业检测的若干问题 (25)5 影响传感器测量精度的因素及消除方法 (26)6 结论 (27)1 绪论基于PSD的激光位移传感器主要应用在高灵敏度、高精度的位移、角度、同轴度的非接触测量与校准领域。
基于激光PSD_的空间载荷指向测量系统
第 40 卷第 2 期航 天 器 环 境 工 程Vol. 40, No. 2 2023 年 4 月SPACECRAFT ENVIRONMENT ENGINEERING179 E-mail: ***************Tel: (010)68116407, 68116408, 68116544基于激光PSD的空间载荷指向测量系统方厚招,薛景赛,孙延博,贾奥男,王润泽,王 瑞(上海卫星工程研究所,上海 201109)摘要:为满足卫星载荷指向高精度测量需求,设计基于激光位置敏感探测器(PSD)的空间载荷指向测量系统。
主要原理是:将激光发射至反射器(安装于载荷)处,经反射器反射到PSD光敏面后,PSD感应激光形成光电流,再经过电流−电压变换处理后输出给高精度采集控制器,最后通过高精度采集控制器中的算法进行数据处理得到载荷指向的小角度变化。
试验证明,该系统测量角度范围±0.15°,俯仰角和倾斜角测量精度优于0.002°,角度稳定性优于0.000 4°(3.5 h)。
该系统不仅可满足在轨因热变形等因素产生的载荷指向小角度转动测量要求,同时可满足地面测试中的小角度高精度测量需求。
关键词:载荷指向;位置敏感探测器;小角度测量;高精度;高稳定性中图分类号:TP212.14; TH822文献标志码:A文章编号:1673-1379(2023)02-0179-05 DOI: 10.12126/see.2022115Space load pointing measurement system based on laser PSDFANG Houzhao, XUE Jingsai, SUN Yanbo, JIA Aonan, WANG Runze, WANG Rui(Shanghai Institute of Satellite Engineering, Shanghai 201109, China)Abstract: In order to meet the requirements of high precision measurement of satellite load pointing, a space load pointing measurement system was designed based on laser position sensitive detector (PSD). The principle was as follows: a laser beam was transmitted to the reflector installed on the load, and then it was reflected to the photosensitive surface of the PSD; a photocurrent was generated by the PSD sensing laser light; after current to voltage conversion, the signal was outputted to a high-precision acquisition controller, in which data was processed using algorithm to obtain the small angle change of the load pointing. The test results show that the measurement angle range of the system is ±0.15°; the measurement accuracy of pitch and tilt angles is within 0.002°; and the measured angle stability is better than 0.000 4° within 3.5 hours. The system may not only meet the requirements of small angle rotation measurement of load pointing caused by thermal deformation and other factors in orbit, but also meet the requirements for small angle and high precision measurement in ground testing.Keywords: load pointing; position sensitive detector (PSD); small angle measurement; high precision; high stability收稿日期:2022-11-01;修回日期:2023-03-27基金项目:国家重点研发计划项目(编号:2019YFA0708904)引用格式:方厚招, 薛景赛, 孙延博, 等. 基于激光PSD的空间载荷指向测量系统[J]. 航天器环境工程, 2023, 40(2): 179-183 FANG H Z, XUE J S, SUN Y B, et al. Space load pointing measurement system based on laser PSD[J]. Spacecraft Environment Engineering, 2023, 40(2): 179-1830 引言在卫星工程领域,当星体结构和机构因热变形或机械振动发生变化时,相应的载荷安装底座会相对于其基准产生变形,进而使得载荷指向相对原始位置发生小角度的转动,产生相应的偏差,影响高精度测量载荷的测量精度。
基于PSD的激光三角测距法原理、系统和精度分析
基于PSD的激光三角测距法原理、系统和精度分析激光三角测距法原理、系统和精度分析1.三角测距方式三角测距是一种测量距离的方法,通过测量三角形的三个角度或三个边长来确定目标物体与测量仪之间的距离。
激光三角测距法就是利用激光束发射器向目标物体发射激光束,然后通过接收器接收反射回来的激光束,最后利用三角形计算目标物体与测量仪之间的距离。
2.激光三角法原理分析激光三角测距法是利用激光束在空间中直线传播的特性,通过测量激光束的发射方向和反射方向之间的角度差,来计算目标物体与测量仪之间的距离。
在实际应用中,通常采用相位测量法来测量激光束的相位差,进而计算出角度差,从而得到目标物体与测量仪之间的距离。
3.激光三角法距离计算激光三角测距法的距离计算涉及到角度测量和相位测量两个方面。
角度测量是通过测量激光束的发射方向和反射方向之间的角度差来实现的,而相位测量则是通过测量激光束的相位差来计算角度差。
最终,通过三角形计算公式,可以得到目标物体与测量仪之间的距离。
4.激光三角法精度分析激光三角测距法的精度受到多种因素的影响,包括系统探测能力、像点弥散斑等。
系统探测能力是指系统对光信号的接收能力,它受到PSD接收光功率、光能质心等因素的影响。
像点弥散斑是指激光束在目标物体表面反射时产生的光斑扩散现象,它会对系统的探测能力产生影响。
5.系统探测能力的影响因素5.1 PSD接收光功率对系统探测能力的影响PSD接收光功率是影响系统探测能力的重要因素之一,它受到激光束功率、反射率等因素的影响。
当PSD接收光功率较小时,系统的探测能力会受到限制,从而影响测量精度。
因此,在实际应用中,需要采用一定的技术手段来提高PSD接收光功率,以提高系统的探测能力。
5.2 光能质心对探测能力的影响光能质心是指激光束在PSD上的位置,它受到激光束发射方向、反射面形状等因素的影响。
当光能质心偏离PSD中心时,会导致系统的探测能力下降,从而影响测量精度。
基于PSD的微位移传感器建模的实现方法
基于PSD的微位移传感器建模的实现方法位置敏感传感器(position sensitive detector,PSD)广泛应用于光学位置、角度的测量与控制、工业自动化生产、远程光学控制系统、微电子生产中的各类检测和监控、位移和振动监测等。
在PSD 的众多应用领域中,应用最为广泛的就是位移测量。
本文通过光学三角测量的方法将测量物理位移信号转换成PSD 能够测量的位移信号,然后利用PSD 工作原理将位移信号转换成电流信号,通过后续电路将电流信号转换成电压信号,经过放大、滤波、A/D 处理后交由计算机对采集得到的电压(V)和位移(S)信号进行处理。
为准确反映该PSD 的微位移传感器系统的V-S 间关系,实现精确测量,需要拟合出一条曲线尽可能逼近PSD 的微位移传感器实际的输入、输出特性。
文中采用MATLAB 语言,运用矩阵运算,由实验测得数据采用分段拟合的方法建立了PSD 的微位移传感器V-S 间的数学模型,对于PSD 的微位移传感器实际的非线性特性进行拟合,逼近得出最佳关系曲线。
1 基于PSD 的微位移传感器测量原理分析1.1 PSD 的工作原理PSD 分为一维PSD 和二维PSD。
一维PSD 大致分为P-I-N 3 层。
一维PSD 截面如图1 所示。
表面P 层为感光面,从P 层两侧分别引出一个电极,作为输出。
中间的I 层为电离层。
底面N 层的引出一个电极,作为公共端并施加反偏电压。
PSD的光敏层接受入射光照射时,在相应的入射位置上所产生的电荷与光能成正比例关系,电荷定向移动形成光电流由P 层两个输出电极输出。
2 个电极输出的电流大小都与入射光点位置到各电极之间距离有关,若感光面电阻是均匀分布的,距离越大,光电流越小;反之,则越大。
PSD 的等效电路如图2 所示,设电极1 和电极2 的距离为L,电极1 和电极。
激光三角法测距传感器的设计与实现
机, 在室温和自然光下, 以不同的物体作被测目 标, 对其应用特性进行了测试。 测试结果表明, 以具有均匀散射特性的物体作为被测目标时, 可以达到较好的精度和线性度。 如以白纸为目 标, 测 距 范 围 可 达 60 · 140mm , 分 辨 率 可 达 011mm。 以非均匀散射的物体作被测目标时, 该传感器的精度和线性度略有下降。 以黑色物 体 (如橡胶) 作被测目标时, 由于散射光斑较弱, 位敏元件 PSD 的输出较小, 测距离误差较大。 而以非匹配表面 (粗糙度太高或太低) 的物体及 透明体作被测目标时, 由于位敏元件 PSD 接收 不到散射光斑, 传感器基本上无输出。
4 结束语
不能使用具有非匹配表面的物体以及透明 物体作被测目标, 这是激光三角法测距传感器 的主要不足之处。 但在实际测量中大多数物体 的表面都是具有散射特性的, 因此该传感器无 论是在工业自动检测领域还是在机器人上都有 着广阔的应用前景。
参考文献
1 Toku ji O kada, J ap an, D evelopm en t of an O p ti2 ca l D istance Sen so r fo r Robo ts, T he In terna tona l Jou r2 na l of Robo tics R esea rch, V o l. 1, N o. 4,W in ter 1982.
信号处理电路的主要功能是将位敏元件 PSD 的输出电流 I1 和 I2, 经过放大和运算处 理, 变换成与距离相对应的电压信号。
信号处理电路由前级放大电路、脉冲解调 电路、算术运算电路、后级放大电路、自动控制 增益电路和监测指示电路几部分组成。其中, 算 术运算电路是最核心的部分。 由于各光学器件 的实际定位值与理论设计值之间有一定的差 别, 这些差别都会以非线性的形式反映在传感 器的输出上。因此, 我们所设计的算术运算电路 除了能实现式 (1—1) 和 (2—1) 所要求的算术运 算功能外, 还能够通过调整电路参数来改善传 感器的非线性。可以说, 该部分电路的性能直接 影响了测距传感器的测量精度和线性度。
传感器技术 - 基于 PSD 的高精度激光校准仪的设计

传感器与微系统(Transducer and Microsystem Technologies)2006年第25卷第6期基于PSD的高精度激光校准仪的设计*焦国华1,2,李育林1,胡宝文1(1.中国科学院西安光学精密机械研究所,陕西西安710068;2.中国科学院研究生院,北京100039)摘要:针对国内对轴系的校准技术普遍采用传统的手工方法,提出了一种基于位置敏感探测器(PSD)的高精度激光校准的解决方法。
在PSD信号处理上,使用高精度的A/D转换单片机运用软件算法的方式代替传统的运算电路方法计算PSD位置值,有效地提高了系统的精度和稳定性。
回转式校准仪的偏移测量范围为±4mm,分辨力为1.5µm、精度为5.5µm。
可以广泛用于精确轴系校准和定位。
关键词:激光微位移测量;激光校准;位置敏感探测器;轴系校准中图分类号:TH741.4 文献标识码:A 文章编号:1000-9787(2006)06-0064-03Design of the high precision laser alignment system with PSD*JIAO Guo-hua1,2,LI Yu-lin1,HU Bao-wen1(1.Xi’an Institute of Optics and Precision Mechanics,Chinese Academy of Sciences,Xi’an710068,China;2.Graduate School,the Chinese Academy of Sciences,Beijing100039,China)Abstract:Aim at the traditional manual way of the shaft alignment,a high precise laser alignment system with position sensing detector(PSD)is describes.In the PSD signal process,a new method to calculate the value of the position is adopted by using single chip computer with A/D change and the software arithmetic insteud of substitutethe pure circuit method.The accuracy and the stability of system are improved.The range of offset measurement is±4mm;the resolution is1.5µm,the accuracy is5.5µm.It can be used for shaft aligment and position.Key words:laser micro-displacement measurement;laser alignment;position sensing detector(PSD);shaft alignment0 引言在机械安装和调试中,常需将轴承与转动组件(例如:电机轴)准确安装到位,这就要求各机组轴系的校准可靠。
光电子课程设计_基于三角测量法的激光测距
光电子课程设计:基于三角测量法的激光测距摘要:本文先对激光测距的种类及原理进行介绍,其次分析不同种类的优缺点。
确定制作测距仪器的制作方向。
分析测量当中不同元器件存在的问题,寻找有效的解决方案,重点研究摄像头成像时存在误差的形成原因。
根据研究得到的数据,对PC客户端的程序设计进行调整。
利用程序尽可能减少由于硬件产生的误差。
重点是设计出能确定光点的定位算法,通过对摄像头的定标、激光定位,达到实验数据与实际测量误差在10%以内。
最后,提出对作品进行优化和系统功能提升计划关键词:短距离、低成本、三角测量法ABSTRACT: In this paper, the principle of laser ranging species and introduced first, followed by analysis of the advantages and disadvantages of different types. Production rangefinder to determine the direction of the production. Analytical measurements among different components of the problems, to find effective solutions to the causes errors in the presence of the camera focused on imaging. According to data obtained from studies on the client PC programming adjustments. The use of procedures to minimize errors due to hardware-generated. Focuses the light spot can be determined to design the location algorithm, through the camera calibration, laser positioning, to the experimental data and the actual measurement error is within 10%. Finally, the work in optimizing system functionality and Enhancement ProgrammeKEY WORDS: Short distance、Low cost 、Triangle measurement目录1、前言1.1激光测距1.2激光测距仪1.3三角测量法激光测距简介1.4设计目标2、测距方案2.1几种常用的测距方法2.1.1手持激光测距仪2.1.2望远镜式激光测距仪2.2测距方案选定2.3三角测量法3、硬件模块设计3.1激光发射模块设计3.2信号接收模块设计3.2.1摄像头定标3.3激光出射角4、PC程序设计4.1摄像头调用4.2光点定位5、结论前言1.1激光测距激光测距(laser distance measuring)是以激光器作为光源进行测距激光测距技术是一种集合了光学、计算机科学、机械设计等的高新技术。
基与PSD的位置测量系统—光电传感器在光通信中的应用
摘要本文介绍光电检测器件以及光电传感器在光通信中的应用的一个实验----基与PSD的位置测量系统。
激光通信技术是当今世界发展速度最快、覆盖范围最广、渗透性最强、应用最广泛的一个高新技术领域,同时也是推动全球信息通信业发展的主要驱动力量,信息通信技术在经济、社会各个领域的广泛应用,不仅能够减少经济活动的交易费用,大大降低社会运行成本,而且能够促进知识的传播和信息的共享,对于一个国家国民整体素质的提高和经济社会的长远发展也将产生重大的意义。
光电传感器非常广泛的应用在激光通信中,它是一类把光辐射信号转变为电信号的器件,其工作原理是基于光辐射与物质的相互作用所产生的光电效应。
虚拟仪器是现代检测仪器的发展方向。
软件就是仪器,这是虚拟仪器的基本思想。
因为,我们是利用计算机技术来实现和扩展传统仪器的功能。
所以,提高计算机软件编程效率也就成了一个非常现实的问题。
关键词:激光通信光电传感器虚拟仪器ABSTRACTThis text introduces an experiment that the photoelectricity measures the device and application in the photo-communication of photoelectric transducer ----The position measuring systems of base and PSD.The laser communication technology is the most development speed quickest, the cover scope broadest, the permeability is strongest, applies in a most widespread high-tech area, simultaneously also is impels the global information correspondence industry development the main actuation strength, the information communication in the economical, the social each domain widespread application, not only can reduce the economic activity the transaction expense, greatly reduces the social movement cost, moreover can promote the knowledge dissemination and information sharing, also will have the significant significance regarding a national national overall quality enhancement and the economic society long term development.photosensor is widespread used in the laser communication wid, it is a kind of transforms that he ray radiation signal into the electrical signal component, its principle of work is the photoelectric effect which produces based on the ray radiation and the material mutual function.The labview is the modern instrumentation development direction. Software is an instrument, this is the labview instrument basic thought. we are realize and the expansion tradition instrument function using the computer technology. Therefore, enhanced the computer software programming efficiency also to become an extremely realistic question.Key word: Laser communication, electro-optical sensor, labview目录第一章绪论 (3)1.1光通信的现状及发展 (3)1.2虚拟仪器的简介 (3)第二章光电检测的重要性及原理 (2)2.1 光电检测的重要性 (2)2.2 光电检测的原理 (3)第三章光电检测器件 (4)3.1 真空光电检测器件 (5)3.2 半导体光电导器件 (6)3.3半导体结型光电器件(光伏器件) (7)第四章光电传感器在光通信中的应用 (9)4.1实验装置 (9)4.2 虚拟仪器VI测试系统的构成框图 (10)4.3系统硬件实现 (10)4.4系统软件实现 (17)第五章实验及分析 (23)5.1实验实施 (23)5.2实验结果与分析 (25)总结 (27)致谢 (27)参考文献 (29)第一章绪论1.1光通信的现状及发展光通信是现代光学和电子学相结合的综合应用技术,它在70年代初期获得了迅速发展,而在近十年取得的进展是十分惊人的,现今已成为现代通信的主要传输手段。
基于PSD的激光三角MATLAB时显轮廓仪
Vo1.39 No.2March 2021第39卷第2期2021年3月龙岩学院学报JOURNAL OF LONGYAN UNIVERSITY 工业技术基于PSD 的激光三角MATLAB 时显轮廓仪张新红,黄智杰,兰发胜,李华健,陈虹微,陈晶晶,吕晶(龙岩学院 福建龙岩 364000)摘要:为适应应用型人才培养,提高学生综合实践能力,设计激光三角轮廓扫描系统。
以PSD 为光电探测元件构成双透镜激光三角测头,单片机控制测头电机x-y 平面扫描运动,同时获得物 体高度Z ,测量结果通过串口通信实时传给MATLAB ,实现物体(X ,y ,Z )三维轮廓实时显示。
本设 计融合了电子技术、光电子技术、单片机、MATLAB 、光电检测等电子、光电专业本科基础技术课 程,个体基础性强,可以作为相关专业应用型人才培养的实践教学典范。
关键词:激光三角法;轮廓扫描;单片机;PSD ; MATLAB中图分类号:TM93 文献标识码:A 文章编号:1673-4629 (2021) 02-0010-05随着半导体芯片技术的快速发展,人工智能、自动控制已深入到生产制造、智能家居、医疗、遥感监控、 逆向工程等各个领域,这就急需应用型电子、光电、电信、计算机等专业人才。
增加实践训练,加强专业知 识联系,提高综合设计、解决实际问题能力,是培养应用型人才的重要举措茁。
为此,教育部、科技部组织 高校开展各类学科竞赛,大力推进实践课程改革和专业群建设[2]。
在模拟电子、数字电子、单片机、光电子 技术、传感器、光学、激光原理、光电检测技术等课程实验基础上,联合开发综合性课题的课程实训、毕业设 计、大学生创新创业项目、挑战杯等是各高校常用的提高应用能力的实践训练方法。
激光三角测头运用经典的三角法测距[3],以激光为非接触测量媒质,实现距离、位移、长度、轮廓、形貌 等物理量测量[4],广泛用于三坐标测量机、工业照相机、激光比长仪中。
位置敏感探测器PSD 测量精度较 高,驱动和处理电路简单,常用于激光三角测头中[5]。
激光三角位移传感器定位算法优化设计
激光三角位移传感器定位算法优化设计陈家兴;陶卫;杨红伟;曾新贵;张正琦;赵辉【摘要】采用激光三角测距原理设计并制作了高集成度的激光三角位移传感器测头LDSP-100.第一版机型的软件算法基于曲线拟合中的多项式拟合和高斯拟合,进行光斑定位.由于一体化设计对光斑定位稳定性要求极高,单纯的拟合算法定位无法满足.经进一步优化设计,实现了基于平方加权灰度质心的分段平均算法.实验、对比和分析表明:优化后的基于平方加权灰度质心的分段平均算法,重复性误差达到±0.003 7 mm(100 mm量程),即±0.0037%F.S.,高于基于灰度质心的分段平均算法60.4%;高于高斯拟合算法22.9%.【期刊名称】《传感器与微系统》【年(卷),期】2016(035)009【总页数】4页(P62-65)【关键词】激光三角测量;重复性精度;高斯拟合法;灰度质心;平方加权灰度质心;分段平均【作者】陈家兴;陶卫;杨红伟;曾新贵;张正琦;赵辉【作者单位】上海交通大学电子信息与电气工程学院,上海200240;上海交通大学电子信息与电气工程学院,上海200240;上海交通大学电子信息与电气工程学院,上海200240;上海交通大学电子信息与电气工程学院,上海200240;上海交通大学电子信息与电气工程学院,上海200240;上海交通大学电子信息与电气工程学院,上海200240【正文语种】中文【中图分类】TH744在激光三角位移传感器的发展过程中,高集成度的一体化测头越发受到青睐。
在传感器集成度逐步提高的过程中,光学、机械、电子等硬件规模的缩小,会引入影响传感器性能的不稳定因素。
经过调测,在硬件系统相对成熟的前提下,优化软件算法,成为大幅度提高传感器精度和稳定性的首要任务。
在一体化的激光三角测距原理设计中,激光光斑成像波形畸变增大,传统的高斯拟合和灰度质心算法均无法满足定位的重复性要求。
基于平方加权灰度质心的分段平均算法,对消除随机误差,滤除波形波动均有较好效果,达到了目前最好的重复性精度。
采用PSD的激光平台测量仪的设计
文章编号:1671-637Ú(2007)06-0186-03采用PSD的激光平台测量仪的设计张金根,刘志勤,衣彬,伏艳(第二炮兵工程学院指挥自动化系,西安710025)摘要:针对传统的测量小角度、小位移的工具所存在的体积大、功耗大、成本高、操作复杂、测量精度难以保证等缺陷,设计了一种采用PSD作为主测量器件,ADS7825作为A P D转换器件, LPC2214作为核心控制器件的激光平台测量系统。
经过严格的测试表明,该系统能够达到较高的测量精度,大幅度降低了成本,体积、功耗都比较小,同时操作简单。
关键词:激光平台测量仪;位置敏感探测器;角位移中图分类号:V241.4文献标识码:ADesign of a laser-measurer of platformbased on position sensitive detectorZHANG Jin-gen,LI U Zhi-qin,YI Bin,FU Yan(T he Second Artillery Engineering Institute,Xi.an710025,China)Abstract:Traditional instruments for small-angle,small-displacement measurment always have some disad-vantages of large volume and power c onsumption,high cost,complex operation and uncontrollable metrical precision.To overcome the disadvantages,we designed a laser-measurer of platform.In this system,a Pos-i tion Sensitive Detector(PSD)was used as the main metrical parts,ADS7825was used as A P D converter, LPC2214was used as laser platform measure ment system for the kernel controller.Rigorous tests showed that the syste m can gain a high measurement precision with reduced cost,volume and power consumption,and can be operated easily.Key words:laser-measurer of platform;Position Sensitive Detec tor(PSD);angle-displacement0引言随着科学技术的进步,在工业和军事应用场合,对于角度、水平度的测量定位精度要求越来越高,传统的工具虽然也能得到较高的测量精度,但是其体积、功耗都比较大,成本过高,而位置敏感探测器PSD作为新型位置传感器,是一种基于半导体PN结横向光电效应、能够测量光斑在探测器表面连续的新型光学器件。
基于PSD三角测距的车辆避障系统设计
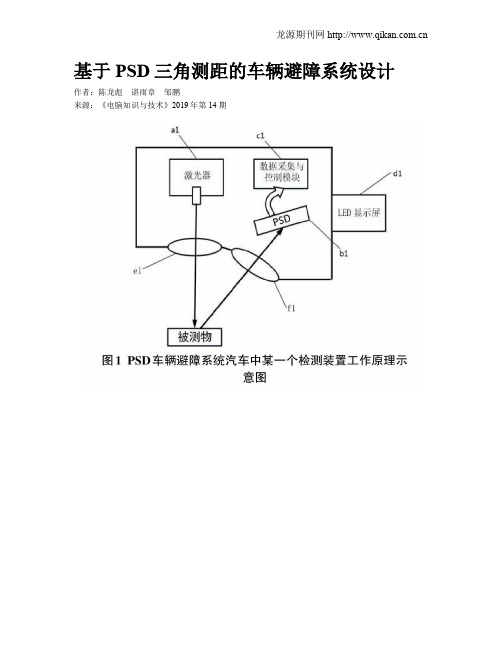
基于PSD三角测距的车辆避障系统设计作者:陈龙彪谌雨章邹鹏来源:《电脑知识与技术》2019年第14期摘要:针对目前市面上出现的大部分新型智能避障系统结构复杂、制造难度高、制造成本高等问题,本文自主设计了一套全新的车辆避障系统。
该装置通过使用PSD三角测距的方式来采集障碍物位置信息,并将其送入以AT89C52为数据采集与控制的模块,最后在LCD屏幕上显示障碍物信息,能够实现精准探测障碍物位置,具有很高的应用价值。
关键词:PSD三角测距;车辆避障;障碍物中图分类号:TP301 ; ; 文献标识码:A文章编号:1009-3044(2019)14-0205-02Abstract: In view of the complex structure, high manufacturing difficulty and high manufacturing cost of most of the new intelligent obstacle avoidance systems currently on the market, this paper independently designed a new vehicle obstacle avoidance system. The device collects the obstacle position information by using PSD triangle ranging, and send it to the dataacquisition and control module based on AT89C52. Finally the obstacle information will display onthe LCD screen, which can accurately detect the position of the obstacle. And this system is very high Application value.Key words: PSD triangle ranging; vehicle obstacle avoidance; obstacles随着人民生活水平的日益提高,人们对汽车这种交通工具的需求量越来越大,这也导致城市交通的负荷不断增加,与此同时,也引发了一系列行车安全问题【1~2】。
基于PSD激光三角测量的非线性校正电路

2005年第24卷第6期传感器技术(Journai of Transducer Technoiogy)基于PSD激光三角测量的非线性校正电路赵斌,侯金龙(华中科技大学机械学院仪器系,湖北武汉430074)摘要:激光三角测量是目前非接触测量的主要方法之一,由于位移量与像面上光点位置的关系不是线性的,这在用位置敏感探测器(PSD)构成的探测系统中造成了非线性问题。
提出一种新的模拟信号处理方法和电路补偿了这种非线性,实现了非线性校正。
关键词:位置敏感探测器;激光三角测量;非线性校正中图分类号:TH741.1 文献标识码:B 文章编号:1000-9787(2005)06-0009-03Nonlinear correcting circuit for laser triangulationmeasurement based on PSDZHAO Bin,HOU Jin-iong(Dept of Instr,Sch of Mech Sci&Engin,huazhong University of Science&Technology,wuhan430074China)Abstract:Laser trianguiation measurement is one of the most important noncontact measurements.But there isnoniinearity between the distance of the object and the distance of its image,and noniinear probiem is caused inthe detecting system proposed of position sensitive detetor(PSD).A new anaiog signai processing circuit ispresented to compensate this noniinearity.Key words:PSD(position sensitive detector);iaser trianguiation measurcment;noniinear correction0 引言激光三角测量是目前非接触测量的主要方法之一,它主要应用在物体表面是非镜面的场合,应用范围非常广泛。
基于PSD的激光三角测距法原理、系统和精度分析
激光三角测距法原理、系统和精度分析目录1 三角测距方式 (2)2 激光三角法原理分析 (4)3 激光三角法距离计算 (5)4 激光三角法精度分析 (6)5 系统探测能力的影响因素 (9)5.1 PSD接收光功率对系统探测能力的影响 (9)5.2光能质心对探测能力的影响 (16)5.3像点弥散斑对系统探测能力的影响 (19)激光三角法作为目前一种非常重要的非接触式测量方法,广泛运用于物体位移、厚度和三维面形等方面的测量。
激光三角法利用一束激光经光学系统调节后照射到被测物体表面,形成一小光斑,经过被测物体表面散射后通过接收物镜聚焦成像在光电探测器的接收面上。
被测点的位移信息由该光点在探测器的光接收面上所形成的像点位置决定。
当被测物体移动时,光斑相对于接收物镜的位置发生变化,相应的其像点在光探测器接收面上的位置也将发生改变,根据其像点位置的变化和测量系统的结构参数可求出被测点的位移信息。
由于入射光线和反射光线构成一个三角形,所以该方法被称为激光三角法。
1 三角测距方式系统三角结构方式初步选定采用直入射法垂直接收屏方式。
对于本系统,接收物镜面几乎与散射光光轴垂直,接收物镜光轴与入射光光轴的夹角θ角非常小,计算出只有约1.14度,在一般的机械零件加工和安装调试过程中这么小的角度是很难实现的,而且此时接收物镜也很难在普通光学支架上定位,故将垂直接收方式的结构设计为以下形式:图1 改进型垂直接收屏方式原理图改进型方式中,接收物镜光轴平行于入射光轴,并与物面散射光光轴成θ角,接收物镜与光电探测器接收面平行。
光束i垂直入射到移动物面上并与接收物镜的主光轴相交于位于M平面上的O点,称M平面为零参考平面,O点在像屏上的像点是O’点。
移动物面上的A点和参考平面上的O点经过漫反射和半漫反射后通过透镜分别成像在光电传感器P上的A’点和O’点。
A点相对于零参考平面M的位移量记为∆,A点的位移计算公式为:θδθθcos sin cos 120+=∆d d (1) 与垂直接收屏接收方式相比,位移计算公式中多了一个系数θ2cos此时,焦距公式为sd f 1111-= (2) 由此推导出精度公式:)11()(cos sin )cos cos (222210220s f ds s s d d d d d +∆-=∆-=∆θθθθδ (3)在相同焦距和系统宽度条件下,比垂直接收方式相对比,三种颜色曲线代表不同的接收物镜焦距,如图2。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
您的论文得到两院院士关注 文章编号:1008- 0570(2008)02- 2- 0003- 02
嵌入式系统应用
基于 PS D 激光三角测距传感器的最优设计
Pa ra m e te r Op tim iza tio n o f La s e r Tria n g u la tio n S e n s o r Ba s e d On PS D
子 技 术 的 发 展 , 为 优 化 系 统 设 计 、提 高 系 统 的 可 靠 性 、缩 小 体 积 、降 低 功 耗 和 缩 短 产 品 的 开 发 周 期 , 提 供 了 一 条 方 便 的 途 径 。
关键词:激光测距;参数设计;三角测量;位敏检测器
中 图 分 类 号 : T N241
文献标识码:A
距 法 , 可 使 测 距 系 统 具 有 体 积 小 、灵 敏 度 高 、噪 音 低 、分 辨 率 高 、响 应 速 度 快 、价 格 低 等 优 点 。 利 用 激 光 三 角 测 距 原 理 研 制 的
激 光 测 距 传 感 器 系 统 精 度 为 0.5%以 上 。分 析 表 明 : 随 着 越 来 越 简 化 的 PSD 编 程 专 用 工 具 软 件 的 出 现 , 紧 密 结 合 其 相 关 微 电
技 术
shrink volume, reduce power and shorten exploitation period. Key wor ds: Laser Range Finder , Par ameter Design, Tr iangulation Measur ement, Position Sensitive Detector
在激光直线三角法测距原理图中 ( 如 图 1) , △X 表 示 光 斑 位 移 量 , △Y 表 示 目 标 位 移 量 , θ表 示 散 射 光 入 射 角 , φ表 示 成 像角, 为使光接收器上的像点始终位于焦平面上, 光接收器的受 光面与成像光轴成一夹 φ角, 其目的一是 根 据 成 像 原 理 建 立 入 射光斑与其象斑位移的精确关系, 二是可使像点最小, 有利于提 高测量精度。S1 表 示 透 镜 中 心 与 物 基 点 之 间 的 距 离 , S2 表 示 透 镜中心与象基点之间的距离。根据几何学可得到下面公式:
式中 L 表示 PSD 两电极间距离, f 表示透镜焦距。上式也是 实现精密测量的重要条件。
4 结论
越短程测距越有可能提高测量精度, 但测程也不能无限制 地 缩 短 。由 于 目 前 对 激 光 三 角 位 移 传 感 器 的 光 学 系 统 研 究 甚 少 , 因此, 在该方面的研究还充满很大的发展空间。目前, 采用基于 PSD 激光直线三角测距法已能达到比较令人满意的测量精度和 速度, 而且方法容易实现。最重要的是, 激光三角测距作为光电 检测中的一种非接 触 式 单 点 测 量 法 , 具 有 测 量 速 度 快 、精 度 高 、 抗 干 扰 能 力 强 、测 量 点 小 、操 作 简 单 、使 用 范 围 广 等 优 点 。
则目标位移为
当目标左移时, 由几何关系可得到
则目标位移为
技 式中,
术
因此, 可以看出被测目标的位移是像点位移量
入射角 θ、成像角 φ的函数。
创
3 参数最优化设计
、散 射 光
新
3.1 像点位移量△X
图 3 标定法原理图 Fig.3 principle of calibration 如图 3 标定板与 PSD 摄像机的轴线垂直放 置 , 且 点 22 位 于 摄 像 机 的 轴 线 上 , 沿 Y 轴 前 后 移 动 标 定 板 , 使 激 光 打 在 20 上, 记下此时标定板的位置, 以此作为零点, 然后前后移动标定 板, 使激光打在 21 上, 记下标定板移过的距离 m1。同样地激光 点从打在点 21 到打在点 22, 从点 22 到点 23, 从点 23 到点 24, 标 定 板 分 别 移 过 的 距 离 m2、m3、m4。 由 三 角 形 关 系 得
田原嫄: 在读博士研究生 《P LC 技术应用 200 例》
图 1 直射法三角测距原理图(direct projection) Fig.1 principle of triangulation measurement
邮局订阅号: 82-946 360 元 / 年 - 3 -
嵌入式系统应用
中 文 核 心 期 刊 《 微 计 算 机 信 息 》( 嵌 入 式 与 S OC )2008 年 第 24 卷 第 2-2 期
激光三角法测距根据激光入射方向分为直射光三角法和斜 射光三角法。由于直射光三角法与斜射光三角法相比光斑较小 , 光强集中, 不会因传感器与被测物体表面不垂直而扩大光照面 上的亮斑, 对于被测面较粗糙处, 于振动和左右倾斜不定的物 体, 受干扰引起的误差较小。另外, 直射法的传感头在结构上, 也 易做得小而紧凑, 因此, 采用直射三角法。
(吉林大学)田 原 嫄 谭 庆 昌
TIAN YUANYUAN TAN QINGCHANG
摘要:利用 激 光 三 角 测 距 原 理 , 既 可 检 测 平 面 亦 可 检 测 曲 面 轮 廓 , 它 作 为 光 电 检 测 中 的 一 种 非 接 触 式 单 点 测 量 法 , 具 有 测 量
速 度 快 、精 度 高 、抗 干 扰 能 力 强 、测 量 点 小 , 操 作 简 单 、应 用 范 围 广 等 优 点 。 基 于 PSD(position sensitive detector)的 激 光 三 角 测
Abstr act: According to the theory of laser triangulation measurement, it can be used to test not only plane but also curving surface profile. As a non- contact measurement of optic- electro on a single spot, its advantages are high measurement speed, high precision, great anti- jamming, small measurement spot, easy operation, wide application range and so on. Laser triangulation measurement based on PSD makes system perfect with small volume, high sensitivity, low noise, high resolution. The system’s precision is above 0.5%. It shows that with simpler specified PSD software it can be found a convenient way to optimize system design, improve reliability,
(下转第 30 页)
- 4 - 360元 / 年 邮局订阅号: 82-946
当目标右移时, 由几何关系可得到
3.2 散射光入射角 θ 由于激光器轴线和 PSD 摄像机光轴在空间虚相交, 二者的夹 角不易直接测量, 通常可以采用角度传感器等机械装置来测量, 但 是增加装置会导致测量复杂, 成本提高, 而且使测量环增加, 从而 引入误差, 本系统利用图像信息, 采用标定的方法来确定 θ。
1990年 WSI 公司引入了可编程系统器件, 世界 上 第 一 个 把 UVEPROM, SRAM 和可编程逻辑集成在单一块硅片上 。由于它 的高水平集成、可构造性和易于使用, 使得它被广泛地应用于各 个领域。PSD 器件将典型的微控制器单元需要的大部分外围接 口功能组合进一个封装中, 使设计者大大地减少了元件数, 功耗 和电路板空间, 相对地大大较少了系统成本。PSD 器件与电荷耦 合 器 件 CCD 有 着 本 质 不 同 , 它 属 于 非 离 散 性 器 件 , 其 输 出 电 流 随光电不同而连续变化, 并具有体积小、灵敏度高、噪音低、分辨 率高、响应速度快、价格低等优点。PSD4XX 系列器件靠 PC 为基 础的 PSD softTM MS- Windows 兼容的开发工具来支持, 还提供作 为 设 计 输 入 方 法 的 ABEL(PSDabelTM)、高 效 的 滤 波 器 、地 址 翻 译 器 、Magicpro 编 程 器 和 完 整 的 芯 片 仿 真 器 。PSD4235G2 有 3 个 存储器阵列, 它的 52 个 I/O 引脚可单独配置为不同的功能 。同 时, 电源管理单元能够通过选择片选信号从而实现在线节能。
其中, L 表示 PSD 两电极间距离。
由 于 PSD 摄 像 机 的 镜 头 和 激 光 器 的 发 光 端 面 具 有 一 定 的 体积。因此, 二者间距 d 是两个不规则物体之间的距离。镜头和 激光器端面的中心不易确定, 也就不易确定间距。但 d 和 M 之 间成正切关系。由于激光器光轴和接收透镜轴线夹角 θ可以通 过标定的方法来确定。M 是平面与平面之间的距离容易测量。 这样测量间距 d 可以转化为 M 和夹角 θ的测量。