变频调速拖动系统(精选)
精选电力拖动自动控制系统习题集附带答案

一、选择题1.转速电流双闭环调速系统中的两个调速器通常采用的控制方式是 A .PID B .PI C .P D .PD 2.静差率和机械特性的硬度有关,当理想空载转速一定时,特性越硬,则静差率 A .越小 B .越大 C .不变D .不确定3.下列异步电动机调速方法属于转差功率消耗型的调速系统是A .降电压调速B .串级调速C .变极调速D .变压变频调速根据能量转换的角度看,把调速系统分为三类第一类:转差功率消耗型,包括将电压调速,转差离合器调速,转子串电阻调速 第二类:转差功率馈送型,包括串级调速,双馈电动机调速 第三类:转差功率不变型,包括变极调速,变频变压调速4.可以使系统在无静差的情况下保持恒速运行,实现无静差调速的是A .比例控制B .积分控制C .微分控制D .比例微分控制积分控制可以使系统在无警察的情况下保持恒速运行,实现无静差调速 5.控制系统能够正常运行的首要条件是A .抗扰性B .稳定性C .快速性D .准确性控制系统正常工作,稳定性是首要条件。
6.在定性的分析闭环系统性能时,截止频率ωc 越低,则系统的稳定精度A .越高B .越低C .不变D .不确定截止频率与相角裕度对应,截止频率越高,系统响应变快,但稳定性变差。
7.常用的数字滤波方法不包括A .算术平均值滤波B .中值滤波C .中值平均滤波D .几何平均值滤波8.转速电流双闭环调速系统中电流调节器的英文缩写是A .ACRB .AVRC .ASRD .ATR 9.双闭环直流调速系统的起动过程中不包括A .转速调节阶段B .电流上升阶段C .恒流升速阶段D .电流下降阶段 10.三相全波整流电路的平均整流电压为A .20.9cos U αB .21.17cos U αC .22.34cos U αD .21.35cos U α 11.下列不属于双闭环直流调速系统启动过程特点的是A .饱和非线性控制B .转速超调C .准时间最优控制D .饱和线性控制 12.下列交流异步电动机的调速方法中,应用最广的是A .降电压调速B .变极对数调速C .变压变频调速D .转子串电阻调速 13.SPWM 技术中,调制波是频率和期望波相同的 A .正弦波 B .方波 C .等腰三角波 D .锯齿波 14.下列不属于异步电动机动态数学模型特点的是A .高阶B .低阶C .非线性D .强耦合 15.在微机数字控制系统的中断服务子程序中中断级别最高的是A .故障保护B .PWM 生成C .电流调节D .转速调节 16.比例微分的英文缩写是A .PIB .PDC .VRD .PID 17.调速系统的静差率指标应以何时所能达到的数值为准 A .平均速度 B .最高速 C .最低速D .任意速度18.下列异步电动机调速方法属于转差功率馈送型的调速系统是A .降电压调速B .串级调速C .变极调速D .变压变频调速 19.在定性的分析闭环系统性能时,截止频率ωc 越高,则系统的稳定精度 A .越高 B .越低 C .不变 D .不确定 20.采用旋转编码器的数字测速方法不包括A .M 法B .T 法C .M/T 法D .F 法 21.转速电流双闭环调速系统中转速调节器的英文缩写是A .ACRB .AVRC .ASRD .ATR22.下列关于转速反馈闭环调速系统反馈控制基本规律的叙述中,错误的是A .只用比例放大器的反馈控制系统,其被调量仍是有静差的B .反馈控制系统可以抑制不被反馈环节包围的前向通道上的扰动C .反馈控制系统的作用是:抵抗扰动、服从给定D .系统的精度依赖于给定和反馈检测的精度23.笼型异步电动机变压变频调速系统中基频以下调速,下列哪种方式控制性能最好A .恒1sU ω控制 B .恒1rE ω控制 C .恒1gE ω控制 D .恒1sE ω控制24.SPWM 技术中,载波是频率比期望波高得多的 A .正弦波 B .方波 C .等腰三角波 D .锯齿波 25.下列不属于交流异步电动机动态数学模型特点的是A .高阶B .线性C .非线性D .强耦合26.在微机数字控制系统的故障保护中断服务子程序中,工作程序正确的是A .显示故障原因并报警——分析判断故障——封锁PWM 输出——系统复位B .显示故障原因并报警——封锁PWM 输出——分析判断故障——系统复位 C .封锁PWM 输出——分析判断故障——显示故障原因并报警——系统复位 D .分析判断故障——显示故障原因并报警——封锁PWM输出——系统复位27.正弦波脉宽调制的英文缩写是A .PIDB .PWMC .SPWMD .PD28.转速负反馈调速系统的静特性方程中K 的表达式为A .s eK K C α=B .p s eK K K C =C .p s K K K α=D .p s eK K K C α=29.采用比例积分调节器的闭环调速系统一定属于A .无静差调速系统B .有静差调速系统C .双闭环调速系统D .交流调速系统30.异步电动机数学模型的组成不包括A .电压方程B .磁链方程C .转矩方程D .外部扰动二、填空题1.常用的可控直流电源有 晶闸管整流器 、静止式可控整流器、直流斩波器或脉宽调制变换器。
变频调速在桥式起重机拖动系统中的应用

变频调速在桥式起重机拖动系统中的应用作者:耿俊超来源:《中国新技术新产品》2013年第08期摘要:变频调速技术应用到桥式起重机上,弥补了原有继电——接触器控制的缺点,实现了桥式起重机拖动系统的各档速度、加速时间和制动减速时间都可根据现场情况由变频器设置,调整方便。
负载变化时,各档速度基本不变,调速性能好。
关键词:变频调速;桥式起重机;应用中图分类号:TN77 文献标识码:A1概述桥式起重机是工矿企业中应用十分广泛的一种起重机械,桥式起重机,使用频繁,环境恶劣,高温、金属粉尘过多。
桥式起重机电力拖动系统多采用绕线式交流异步电机,转子回路内串入多段外接电阻调速,采用凸轮控制器、继电器、接触器控制。
这种控制系统主要缺点是:(1)桥式起重机工作环境恶劣,工作任务重,电动机以及所串电阻烧损和断裂故障时有发生。
(2)继电——接触器控制系统可靠性差,操作复杂,故障率高。
(3)转子串电阻调速,机械特性软,负载变化时转速也变化,调速不理想。
所串电阻长期发热,电能浪费大,效率低。
要从根本上解决这些问题,只有彻底改变传统的控制方式。
(4)由于现场环境中的金属粉尘、有害气体对电动机集电环、继电器的腐蚀与短路,再加上继电器、接触器控制系统切换频繁,起动时,冲击电流大,因此触头烧损、电刷冒火、电动机烧损故障时有发生,故障率高。
(5)系统抱闸是在运动状态下进行的,对制动器损害很大,闸皮磨损严重而引起的安全隐患。
随着计算机技术和电力电子器件的迅猛发展,电气传动和自动控制领域也日新月异。
其中,具有代表性的交流变频装置和可编程控制器获得了广泛的应用,为PLC控制的变频调速技术在桥式起重机拖动系统中的应用提供了有利条件。
2 系统硬件构成桥式起重机大车、小车、主钩,副钩电动机都需独立运行,大车为两台电动机同时拖动,所以整个系统有5台电动机,4台变频器传动,并由4台PLC分别加以控制。
(1)可编程控制器:完成系统逻辑控制部分。
控制电动机的正、反转、调速等控制信号进入PLC,PLC经处理后,向变频器发出起停、调速等信号,使电动机工作,是系统的核心。
(完整版)异步电动机变频调速系统..
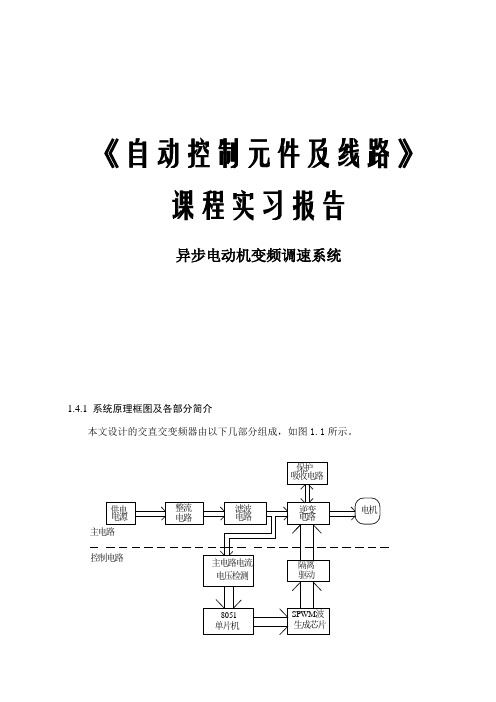
《自动控制元件及线路》课程实习报告异步电动机变频调速系统1.4.1 系统原理框图及各部分简介本文设计的交直交变频器由以下几部分组成,如图1.1所示。
图1.1 系统原理框图系统各组成部分简介:供电电源:电源部分因变频器输出功率的大小不同而异,小功率的多用单相220V,中大功率的采用三相380V电源。
因为本设计中采用中等容量的电动机,所以采用三相380V电源。
整流电路:整流部分将交流电变为脉动的直流电,必须加以滤波。
在本设计中采用三相不可控整流。
它可以使电网的功率因数接近1。
滤波电路:因在本设计中采用电压型变频器,所以采用电容滤波,中间的电容除了起滤波作用外,还在整流电路与逆变电路间起到去耦作用,消除干扰。
逆变电路:逆变部分将直流电逆变成我们需要的交流电。
在设计中采用三相桥逆变,开关器件选用全控型开关管IGBT。
电流电压检测:一般在中间直流端采集信号,作为过压,欠压,过流保护信号。
控制电路:采用8051单片机和SPWM波生成芯片SA4828,控制电路的主要功能是接受各种设定信息和指令,根据这些指令和设定信息形成驱动逆变器工作的信号。
这些信号经过光电隔离后去驱动开关管的关断。
1.4.2 变频器主电路方案的选定变频器最早的形式是用旋转发电机组作为可变频率电源,供给交流电动机。
随着电力半导体器件的发展,静止式的变频电源成为了变频器的主要形式。
静止式变频器从变换环节分为两大类:交-直-交变频器和交-交变频器。
1.交-交型变频器:它的功能是把一种频率的交流电直接变换成另一种频率可调电压的交流电(转换前后的相数相同),又称直接式变频器。
由于中间不经过直流环节,不需换流,故效率很高。
因而多用于低速大功率系统中,如回转窑、轧钢机等。
但这种控制方式决定了最高输出频率只能达到电源频率的1/3~1/2,所以不能高速运行。
2.交-直-交型变频器:交-直-交变频器是先把工频交流通过整流器变成直流,然后再直流变换成频率电压可调的交流,又称间接变频器,交-直-交变频器是目前广泛应用的通用变频器。
调速系统——精选推荐

调速系统一、填空题:1.调速系统中常用调节器有比例调节器、、三种调节器。
答案:比例调节器;积分调节器;比例积分调节器;2.转速负反馈直流调速系统由、、、、等组成。
答案:转速给定;转速调节器ASR;触发器CF;晶闸管变流器U;测速发电机TG3.直流调速系统主要性能指标包括、指标和指标两个部分。
答案:静态性能;动态性能4.双闭环调速系统包括环和环,其中两环之间的关系是为内环,外环为。
答案:电流;速度;电流环;速度换5.逻辑无环流可逆调速系统中,当改变极性,并有时,逻辑才允许进行切换。
答案:转矩极性信号;零电流信号6.通用变频器通常分为、、等三类。
答案:简易型;多功能型;高性能型7.变频器所采用的制动方式一般有、、等几种。
答案:能耗制动;回馈制动;直流制动8.在自动控制系统中常用的反馈形式有:、、、。
答案:转速负反馈;电压负反馈;电流正反馈;电流截止负反馈9.接触器主要用于控制主回路,触头,具有很强的,操作频频高,寿命长。
答案:容量大;灭火能力10.调节器的基本规律主要有双位控制、、、、、、比例积分微分控制等。
答案:比例控制、微分控制、积分控制、比例微分控制、比例积分控制11.采用SPWM技术的交直交变频器属于,输出电压接近,电动机负载,运行效果好。
答案:PWM电压型逆变器、正弦波、运转平稳、低速12.转速负反馈系统中必须采用高精度元件。
答案:测速发电机13.在转速负反馈系统中,闭环系统的转速降减为开环系统转速降的倍。
答案:1/1+K14.在转速负反馈调速系统中,调节转速实质上是落实在调节电压上,所以将转速作为间接调节量,而将电压作为调节量,也可以达到调速的目的,只不过精度稍差。
答案:直接二、判断题:1. 闭环控制系统输出量不反送到输入端参与控制。
()答案:×2. 开环控制系统和闭环控制系统最大的差别在于闭环控制系统存在一条从被控量到输入端的反馈通道。
()答案:√3. 由于双闭环调速系统的电流环,主要是对系统主回路电流变化进行调节的,故对电网电压波动对系统的影响,电流环无调节作用。
轧钢厂输送辊道的变频调速系统设计

轧钢厂输送辊道的变频调速系统设计摘要变频器传动已成为实现工业自动化的主要手段之一,在各种生产机械和生产线中有着广泛的应用。
其中,重要的技术特征是可以充分地与现代网络技术结合,发挥智能控制的优势,实现分布式网络控制系统,这是工业企业自动化的重要发展方向,并已有一些很好的范例。
现在,通用变频器在各行各业中的应用,已成为改造传统工业、改善工艺流程、提高生产过程自动化水平、提高产品质量、改善生产环境、节约能源、推动技术进步的主要技术手段之一,也是国际上更新最快的新技术领域之一。
本论文首先简述了变频调速技术在我国的发展概况和国内外现状对比;其次根据轧钢厂输送辊道的工艺特点和对拖动系统的要求,对电动机、变频器进行选型,并提出变频调速系统的总体设计方案;最后对变频调速系统的主电路、控制电路以及实现控制的软、硬件进行了系统的设计,并对调速系统的实施方案进行了论证。
关键词:6SE70变频器;变频调速;异步电机;输送辊道Design of variable frequency variable speedsystem for conveyer roller of rolling millAbstractInverter driving has become the main means to realize industrial automation .In various production machinery and production line, it has a wide range of applications. One of the important technical characteristics, can be fully with the modern network technology, play advantage of intelligent control and distributed network control system, which is the important industrial automation development direction, and have some very good example. Now, the application of general inverter in every walk of life which has become one of the main technical means to alter traditional industries, improve the production process automation level, improve product quality, improve the production environment, energy saving, and promote technological progress ,which is one of the world's fastest update of new technology.This paper firstly describes the variable-frequency regulating speed technology in the development of our country and situation at home and abroad, Secondly according to the characteristics of rolling process, and constantly to drag system requirements for motor, frequency converter, selection of variable frequency speed regulation system, and puts forward the conceptual design scheme, Finally on frequency-variable speed-adjustable system of the main circuit and control circuit and control hardware and software design of the system, and the implementation scheme of speed control system are discussed.Keywords :6SE70 inverter;Frequency control of motor speed;Asynchronous machine;Conveyer roller目录摘要 (I)Abstract (II)1 绪论 (1)1.1 课题研究背景及意义 (1)1.2 国内外发展状况和未来发展方向 (2)1.2.1 我国变频调速技术的发展概况 (2)1.2.2 国内外现状对比 (3)1.2.3 未来的发展方向 (4)1.3课题的主要研究内容 (5)2 变频调速的基本原理 (6)2.1 变频器的基本结构及工作原理 (6)2.2 变频调速技术的基本原理 (9)2.3 6SE70变频器的应用特点 (9)3轧钢厂输送辊道工艺和调速方案 (11)3.1辊道传输简介 (11)3.2辊道的工艺特点和对拖动系统的要求 (11)3.2.1工艺特点 (12)3.2.2 对拖动系统要求 (13)3.3辊道的调速方案 (14)4变频调速系统的设计 (15)4.1硬件系统组成 (15)4.1.1电动机的选用 (15)4.1.2变频器的选用 (16)4.2系统方案 (17)4.2.1主回路设计 (17)4.2.2控制回路设计 (19)4.3变频调速系统的运行 (20)4.3.1系统配置 (20)4.3.2 外接控制端的配置及工作特点 (22)4.3.3参数设置 (24)结论 (26)致谢 (27)参考文献 (28)附录A (29)附录B (36)1 绪论1.1课题研究背景及意义电气传动是以电动机的转矩和转速为控制物理量,按生产机械工艺要求进行电动机转速控制的自动化控制系统。
车床变频调速的计算实例
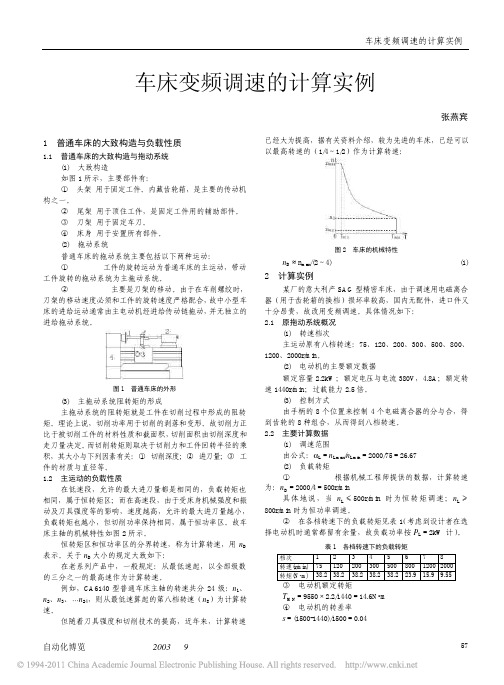
技术讲座 车床变频调速的计算实例自动化博览 2003年9月出版《自动化综合技术文集》,欢迎投稿!57车床变频调速的计算实例张燕宾1 普通车床的大致构造与负载性质1.1 普通车床的大致构造与拖动系统(1) 大致构造如图1所示,主要部件有:① 头架 用于固定工件。
内藏齿轮箱,是主要的传动机构之一。
② 尾架 用于顶住工件,是固定工件用的辅助部件。
③ 刀架 用于固定车刀。
④ 床身 用于安置所有部件。
(2) 拖动系统普通车床的拖动系统主要包括以下两种运动:① 主运动 工件的旋转运动为普通车床的主运动,带动工件旋转的拖动系统为主拖动系统。
② 进给运动 主要是刀架的移动。
由于在车削螺纹时,刀架的移动速度必须和工件的旋转速度严格配合,故中小型车床的进给运动通常由主电动机经进给传动链拖动,并无独立的进给拖动系统。
图1 普通车床的外形(3) 主拖动系统阻转矩的形成主拖动系统的阻转矩就是工件在切削过程中形成的阻转矩。
理论上说,切削功率用于切削的剥落和变形。
故切削力正比于被切削工件的材料性质和截面积,切削面积由切削深度和走刀量决定。
而切削转矩则取决于切削力和工件回转半径的乘积,其大小与下列因素有关:① 切削深度;② 进刀量;③ 工件的材质与直径等。
1.2 主运动的负载性质在低速段,允许的最大进刀量都是相同的,负载转矩也相同,属于恒转矩区;而在高速段,由于受床身机械强度和振动及刀具强度等的影响,速度越高,允许的最大进刀量越小,负载转矩也越小,但切削功率保持相同,属于恒功率区。
故车床主轴的机械特性如图2所示。
恒转矩区和恒功率区的分界转速,称为计算转速,用n D表示。
关于n D 大小的规定大致如下:在老系列产品中,一般规定:从最低速起,以全部级数的三分之一的最高速作为计算转速。
例如,CA6140型普通车床主轴的转速共分24级:n 1、n 2、n 3、…n 24,则从最低速算起的第八档转速(n 8)为计算转速。
但随着刀具强度和切削技术的提高,近年来,计算转速已经大为提高,据有关资料介绍,较为先进的车床,已经可以以最高转速的(1/4~1/2)作为计算转速:图2 车床的机械特性n D ≈n max /(2~4) (1)2 计算实例某厂的意大利产SAG 型精密车床,由于调速用电磁离合器(用于齿轮箱的换档)损坏率较高,国内无配件,进口件又十分昂贵,故改用变频调速。
变频器的六大调速方法
电动机知识变频器的六大调速方法1.变极对数调速方法这种调速方法是用改变定子绕组的接线方式来改变笼型电动机定子极对数达到调速目的,特点如下:具有较硬的机械特性,稳定性良好;无转差损耗,效率高;接线简单、控制方便、价格低;有级调速,级差较大,不能获得平滑调速;可以与调压调速、电磁转差离合器配合使用,获得较高效率的平滑调速特性。
本方法适用于不需要无级调速的生产机械,如金属切削机床、升降机、起重设备、风机、水泵等。
二、[1]方法变频调速是改变电动机定子电源的频率,从而改变其同步转速的调速方法。
变频调速系统主要设备是提供变频电源的变频器,变频器可分成交流-直流-交流变频器和交流-交流变频器两大类,目前国内大都使用交-直-交变频器。
其特点:效率高,调速过程中没有附加损耗;应用范围广,可用于笼型异步电动机;调速范围大,特性硬,精度高;技术复杂,造价高,维护检修困难。
本方法适用于要求精度高、调速性能较好场合。
变频调速分为基频以下调速和基频以上调速,基频以下调速属于恒转矩调速方式,基频以上调速属于恒功率调速方式。
2.串级调速方法串级调速是指绕线式电动机转子回路中串入可调节的附加电势来改变电动机的转差,达到调速的目的。
大部分转差功率被串入的附加电势所吸收,再利用产生附加的装置,把吸收的转差功率返回电网或转换能量加以利用。
根据转差功率吸收利用方式,串级调速可分为电机串级调速、机械串级调速及晶闸管串级调速形式,多采用晶闸管串级调速,其特点为:可将调速过程中的转差损耗回馈到电网或生产机械上,效率较高;装置容量与调速范围成正比,投资省,适用于调速范围在额定转速70%-90%的生产机械上;调速装置故障时可以切换至全速运行,避免停产;晶闸管串级调速功率因数偏低,谐波影响较大。
本方法适合于风机、水泵及轧钢机、矿井提升机、挤压机上使用。
变频器调速原理及调速方法3.绕线式电动机转子串电阻调速方法绕线式异步电动机转子串入附加电阻,使电动机的转差率加大,电动机在较低的转速下运行。
变频调速典型控制系统(三)
作 者简 介 : 亮 (9 9 , , 授 级 高 工 , 士 生 导 师 , ma :l t@ s a cm 马小 13 一) 男 教 博 E i xm_d i .o l n
7 3
电 气传 动 2 1 年 第 4 02 2卷 第 3期
马小亮 : 变频 调 速 典 型 控 制 系统 ( ) 三
3 3 宽 调 速 系 统 .
这是 一类 量 大 面广 的调 速 系 统 , 生产 机 械针
宽调 速 系统要 求 1 0以上 的宽 调 速 范 围 , 0 在
对不 同的产 品品 种 或规 格 , 求 有 相 应 的不 同运 要
最低 速时 仍能保 持 一 定 静 差率 平 稳 运 行 ( 差 率 静
第 3讲 工 艺 调 速 的 典 型 转 速 控 制
系统 [ 3 1] -
工艺 调速 ( 含车 辆牵 引和 船舶 推进调 速 ) 因 指 工艺 要求 而调 速 , 调速便 不 能工作 的 系统 , 不 不能
行 速度 , 运行 过程 中往 往要 求保 持恒速 , 转速 精 对
度 和调 速范 围要 求 不 高 , 加 减 速 等动 态 性 能 也 对
的稳速 精度 长 期 运行 。这类 系统 的 典 型应 用 是 : 风 洞 、 胶 压延 机 、 纸 机 等 传 动 。对 于风 洞 , 橡 造 风
速 不 稳 测量 数 据 就 不 准 确 ; 于 造 纸 机 , 度 不 对 速
讲 和第 4讲介 绍转 速 控 制 , 在第 5讲 和第 6讲 中
分别 介绍 张力 控制 和位置 控制 。工艺 调 速传动 又
分单 电机 传动 和多 电机传 动 2大类 。单 电机传 动
指一 个生 产机 械或 一个工 艺 区段 只有 1台拖 动 电
电梯电力拖动系统

曳 引 机
二、分类
3.变频变压调速系统:
采用单速电动机作为动力,使用电力半导
第
体元件供电,对供电电压和频率进行调
一
节,改变电动机转速(属无极调速)。调
节
速性能达到直流电机的水平,运行舒适感
好;平层精度高;可提供能量反馈装置;
节能环保;是发展的必然。随着变频器的
一
必须串联在电源电路中,电梯停止时,若
节
有一个接触器的主触点未打开,则最迟到 下次运行方向改变时,必须防止电梯再运
行。
14
由静态元件供电(变频器、调速器)和控 制时,采用两个接触器分别切断供电电源 和电机电流。
交流变极调速系统
改变电机磁场极数达到改变电机转速的目 的,属于间歇式工作状态。
电机转速=60×电源频率÷极对数
大量应用,造价逐渐降低。缺点造价高、
系统复杂。
3
变频调速曳引机
单绕组设计,内涡轮风机冷却。
曳 引 机
三类驱动主机比较图
曳 引 机 对 比
二、分类
3.直流拖动系统:
采用交流电动机拖动直流发电机,控制发
第
电机励磁大小,改变发电机输出电压,提
一
供给直流电机动力。或直接控制晶闸管整
节
流对直流电机进行供电。一般用于高速电
主回路原理图
变 频 器 主 电 路
双向逆变式变频器主回路
双
正常工作类似普通变频器,直流母线电压 大于阀值时,Q1~Q6的IGBT轮流导通,
向
将多余能量反馈回电网。
逆
变
主
电
路
变频拖动电梯
电梯起动时,变频器输出较低频率,并按
矿井提升机交流拖动系统的变频调速改造
Pr at 1 9 B. 9 6,2 ( ) 9—4 . 6 1 :2 1
作
地
者 :王
敏
址 :山西 省太原市 中北大学机械工程与 自动化学院
[ ]吴启 迪 ,汪磊. 智 能蚁 群算 法 及 应 用 [ 。上 海 : 3 M]
上 海 科技 出 版社 ,20 . 04
邮
编 :0 05 30l
收稿 1期 :2 0 0 3 09— 3—1 1
Ab ta t T i sa nrd c steta s r t n o eAC d vn y tm fmieh i sn a a l rq e c sr c : hse syito u e h rn f mai ft r ig sse o n os uig vr be f u n y o o h i t i e
( 4):5 4—5 . 8
行阶段采用 串电阻脉动运 行 ,系统 运行 不平稳 , 有电阻损耗 。原有 的 T D电控系统 ,设备故障点 K 诊断 。结果 表明 ,用蚁群 算法训练 的神经 网络具 有较 快 的收 敛 速 度 和较 高 的故 障诊 断 精 度 ,可 以 有效地诊 断齿轮箱 的故 障,提高了诊 断的效率和 质量 。同时 还 可 以看 出 ,用 蚁 群 算 法 训 练 神 经 网 络也 是 1种有 效 的网络训 练法 。
s e d c nr ls s m. T e i r v d h i p rt ss ohy a d s fl n e e e t r tc in i n e e g —a i g p e o t yt o e h mp o e os o e ae mo t l n a ey u d r r c o e t n a n ry s vn ,h g — t pf p o ih
异步电机变压变频调速系统(VVVF系统)——转差功率不变型调速系统
4.几种协调控制方式的比较
综上所述,在正弦波供电时,按不同 规律实现电压-频率协调控制可得不同类 型的机械特性。
1)恒压频比( Us /1 = 恒值 )控制最容
易实现,它的变频机械特性基本上是平行 下移,硬度也较好,能够满足一般的调速 要求,但低速带载能力有些差强人意,须 对定子压降实行补偿。
2)恒Eg /1 控制,是通常对恒压频比控
特性分析(续)
当 s 接近于1时,可忽略式(6-4)分母 中的Rr' ,则
Te3npU 1 s2s[R s21 21 (R L r'lsL'lr)2]1 s (6-6)
即s接近于1时转矩近似与s成反比,这时, Te = f(s)是对称于原点的一段双曲线。
• 机械特性
当 s 为以 上两段的中间 数值时,机械 特性从直线段 逐渐过渡到双 曲线段,如图 所示。
可见最大转矩 Temax 是随着的 1 降低
而减小的。频率很低时,Temax太小将限制 电机的带载能力,采用定子压降补偿,适
当地提高电压Us,可以增强带载能力,见 图6-4。
• 机械特性曲线
n
n0N
1N
n 01
11
1N11 12 13
n 02
12
n 03
13
补偿定子压 降后的特性
O Te
现在的问题是,怎样控制变频装置的电压和频率才能获得恒定的 E r /1 ?
s
恒 Er /1 控制
0
c
a
b
恒 Eg /1 控制
恒 Us /1 控制
10
Te
图6-6 不同电压-频率协调控制方式时的机械特性
按照式(6-1)电动势和磁通的关系,可以 看出,当频率恒定时,电动势与磁通成正比。在
学习任务7:电梯的电力拖动系统

学习任务7电梯的电力拖动系统任务分析通过本任务的学习,了解电梯的机械特性,了解双速电梯、调压调速电梯和变频变压调速电梯的工作原理。
建议课时建议完成本任务为10学时。
学习目标应知1.电梯传动系统的动力学特性。
2.电梯运行速度给定曲线设计。
3. 双速电梯、调压调速电梯和变频变压调速电梯的工作原理应会1.了解电梯机械特性。
2.了解电梯永磁驱动方式学习任务7.1——交流双速拖动系统基础知识一、电力拖动方式电梯运行性能的好坏,很大程度上取决于电力拖动系统的优劣。
随着科学的发展,电梯电力拖动系统经历了从简单到复杂,从不完善到完善的过程。
目前我国曳引式电梯电力拖动系统有两大类型,一是交流拖动系统,即用交流电动机作动力的拖动系统;二是直流拖动系统,即用直流电动机作动力的拖动系统。
交流拖动系统,有单速、双速、调速之分。
直流拖动系统,有可控硅励磁和可控硅供电系统之分。
1.交流单速拖动方式只有一种运行速度,一般只用于服务电梯(杂物电梯),速度小于0.5米/秒。
2.交流双速拖动方式有两种运行速度,大量用于货梯,,速度为0.25米/秒~1.0米/秒。
3.交流调速拖动方式电动机的转速可调的拖动系统,一般用于客梯。
交流调速拖动系统又可分为调压调速(ACVV)和变压变频调速(VVVF)系统。
ACVV系统是通过对交流电动机的定子进行调压调速,减速时配合涡流制动、能耗制动、反接制动等进行减速控制,以获得好的舒适感和平层准确度,多用于2米/秒以下速度的电梯。
VVVF系统是采用变压变频技术,对电动机的供电频率和电压进行控制,可以达到直流电动机驱动电梯的水平,具有体积少,重量轻,效率高,节能省电等优点。
4.直流可控硅励方式是一种发电机--电动机调速系统(简称:G-M调速系统)我国生产的直流电梯多是G-M调速电梯。
调整发电机的励磁电流,就可改变发电机的输出电压,实现了电动机的调压调速。
由于G-M调速系统能耗大,维修困难。
我国早已不生产此类电梯。
电机拖动中变频调速系统的常见故障及排除措施
变频调速技术提供 了有利的依据 。
【 关键词】 电机拖动 ; 变频调速 系统; 常见故 障; 排除措施
电机是一 种实现 电能量转换 的电磁装置 ,包括 电动机和发 电机 检查 电机 、 变频器和 电机之间 的接线 : 检查变频器 三相输出 电压是否 电机拖动是 指由原动机带动生产机械运动 . 以电动机作为原动机并 且 平衡 。 按照人们通常给定的规律带 动生产机械 的运转 . 就称 为电机拖动 电 3 . 7过 热 故 障
2 0 1 4 年O 5 期
科技 嚣向导
◇ 科技论坛◇
电机拖动中变频调速系统的常见故障及排除措施
王 磊
( 唐 山市特种设备监督检 验所
【 摘
河北
唐山
0 6 3 0 0 0 )
要】 根 据实践经验 并结合理论知识对 电机拖动 中变频调速 系统的常见故 障及排除措施进行 了探讨 , 为 日常工作中操作人 员熟练掌握
4 . 日常维护检查应注意事项
变频器上 电之前应先检测周 围环境 的温度及湿度 . 温度过高会导
致变频器过热报警 . 严重时会 直接 导致电路短路 、 变频器功率器 件损 3 . 常见故障及排 除措施 坏 : 空气湿度过大会导致变频器 内部直接短路 在变频 器运行时要注 3 . 1 过 电流 、 过载 风道 排风是否流 畅 . 风机是否有异 常噪 般是 由于变频器的输 出电流超过过电流检测值 ( 约为额定 电流 意其冷却系统工作 是否正常 : P 2 0以上的变频器可直接敞开安装 . I P 2 0以下 的变频器一般应采 的2 0 0 %) 、 变频器 的输 出电流超过 电机或变频器 的额定 负载能力 ( 约 音 。I 变频柜散 热效果好坏将直接影 响变频器 的正常运行 保 为额定值 的 1 6 0 %) 。应检查输入三相电源是否 出现缺相或不平衡 、 电 用柜式安装 . 保护柜应通 风、 防尘 、 防 机接线端子 ( u 、 v 、 w) 电路之 间有 无相 间短 路或对 地短路 ; 检 查 电机 护柜尽可能安装在周 围温度不易上升 的地方 : 频器在柜内应该纵 向安装 . 而且上下 、 左 右方 向应 留有足 和编码器电缆及相序是 否正确 : 检查 电机功率是否 匹配 、 在 电机 电缆 雨性能 良好 :
第5章 5.6转速闭环、转差频率控制的变频调速系统
(6 59)
3 2 2 K m np N s k Ns 2
,是电机的结构常数;
Te K m Φ m
2
s Rr' Rr'2 (s L'lr ) 2
当电机稳态运行时,s 值很小,因而 s也很小,只是1的百分之几,可以认为 s Llr‘ << Rr’ ,则转矩可近似表示为
(2)在不同的定子电流值时,按上图的函数关系 Us = f (1 , Is) 控制定子电压
和频率,就能保持气隙磁通m恒定。
3. 转差频率控制的变压变频调速系统
• 系统组成 • 控制原理 • 性能评价
系统组成
Is
ASRቤተ መጻሕፍቲ ባይዱ
s
1
U s
PWM
U sa
1
U sb
控制转差频率就代表控制转矩,这就是 转差频率控制的基本出发点。
2. 基于异步电机稳态模型的转差频率控制规律 上面分析所得的转差频率控制概念是在转矩近似公式上得到的,当s 较大
时,就得精确转矩公式,把这个转矩特性(即机械特性)
画在下图,
Te f (s )
Te Temax Tem
可以看出: • 在s 较小的稳态运行段上,转 矩 Te基本上与s 成正比,
U sc
电 压 型 逆 变 器
M 3~
FB S
转差频率控制的转速闭环变压变频调速系统结构原理图
控制原理
实现上述转差频率控制规律的转速闭环变压变频调速系统结构原理图如图所示。 频率控制——转速调节器ASR的输出信号是转差频率给定 s* ,与实测转速信 号 相加,即得定子频率给定信号 1* ,即
高压变频调速技术在高炉鼓风机拖动系统中的应用
T n s a rn & Se lC . t . a gh n a g h n Io t e o ,L d ,T n s a ,He e 6 0 9 h ia; . d u a d He v lt ln , T n s a b i 0 3 0 ,C n 3 Me i m n a y P a e P a t a g h n Io & Se l C . t . T n s a ,He e 6 0 9 rn te o,L d , a g h n b i O 3 O ,Ch n , ia. Auo t n o to g n e i g Co,L d ,He e t ma i C n r l En i e r . t . o n bi
.
Co l d S e t Pln , T n s a r n & S e l C . L d , T n s a , He e 6 0 9 C ia . Io  ̄l l Rol h e a t a g h n Io d e t e o, t . a g h n b i 0 3 0 , h n ;2 r n l l ,
2 0 年第 5 08 期 总 第 19期 2
MF A L R IA O R r L U G C LP WE
冶 金 动 力
5
高压变频 调速技术在 高炉鼓风机拖动 系统 中的应用
张丽华 - ,穆 朝z ,韩继征 ,郁 志泳 3 吴 玉峰 。 ,贾建 永 。 ,张 浩 ,康晓村 2 ,王俊 国
Z HANG i u MU Z a HAN i h n YU Z i o g, W U Yu fn L — a, h h o, J. e g, z h— n z y — s, JA iny nz e I Ja -o g,
Z HANG o. KANG a .u Ha Xiot n,W ANG u —u J ng o
异步电动机变频调速系统(VVVF系统)
即采用恒定的电动势频 率的控制方式. 率的控制方式.
二,基频以上调速
在 基频 在基 频 以上 调速 时 , 频 往地增高, 率可以从 f1n 往地增高 , 但电 还要大, 压 U1n 还要大 , 最多只能保持 U1=U1n . 在 基 频 以 下 , 属 于 恒转矩调速" 的性质, " 恒转矩调速 " 的性质 , 而 基频以上, 基本上属于" 恒 基频以上 , 基本上属于 " 功率调速" 功率调速"
广师
* U ω ,在 为了解决这个问题, 为了解决这个问题
和电压, 给定信号 和电压, 频率的控制信号U 频率的控制信号Uabs 之间设置了给定积 分器GI和绝对值变 分器 和绝对值变 换器GAB. 换器 .
广师
(一)给定积分器
由模拟电子路给成的给定积分器原理图如图7-28所示,它 所示, 由模拟电子路给成的给定积分器原理图如图 所示 包含了三级运算放大器. 包含了三级运算放大器.
广师
对于三相负载, 对于三相负载 , 其它两相也各用一套反并联的 可逆线路,输出平均电压相位依次相差120°. 可逆线路,输出平均电压相位依次相差 ° 如果每个整流器都用桥式电路,三相变频装置共 如果每个整流器都用桥式电路, 用三套反并联线路,共需36个晶闸管元件 个晶闸管元件( 用三套反并联线路 , 共需 个晶闸管元件 ( 当每一 桥臂只用一个元件时) 桥臂只用一个元件时). 若采用零式电路,需要18个元件 个元件. 若采用零式电路,需要 个元件.
广师
参考信号的幅值也 可在一定范围内变 化,以决定输出电 压的大小. 压的大小. 三角波载波信号 是共用的, 是共用的,分别与 每相参考电压比较 给出" 后,给出"正"或 的饱和输出, "零"的饱和输出, 产生SPWM脉冲序 产生 脉冲序 列波U 列波 da, Udb , Udc ,作为逆变器功 率开关器件的驱动 控制信号. 控制信号.
高二电力拖动期中考试试题及答案
高二电力拖动期中考试试题及答案一、选择题(每题3分,共30分)1. 电力拖动系统由哪两部分组成?A. 电动机和负载B. 电动机和控制电路C. 传感器和执行器D. 控制电路和负载答案:B2. 下列哪种电动机在启动时电流最小?A. 交流异步电动机B. 交流同步电动机C. 直流电动机D. 无刷电动机答案:B3. 下列哪种调速方法适用于笼型异步电动机?A. 变频调速B. 变压调速C. 变极调速D. 串电阻调速答案:C4. 下列哪个环节不属于电力拖动系统的速度闭环控制?A. 速度给定环节B. 速度反馈环节C. 电流反馈环节D. 速度调节环节答案:C5. 在电力拖动系统中,下列哪个环节的作用是减小系统的速度误差?A. 速度给定环节B. 速度反馈环节C. 电流反馈环节D. 速度调节环节答案:D6. 下列哪种电动机的启动转矩较大?A. 交流异步电动机B. 交流同步电动机C. 直流电动机D. 无刷电动机答案:C7. 下列哪种调速方法可以实现电动机的无级调速?A. 变频调速B. 变压调速C. 变极调速D. 串电阻调速答案:A8. 在电力拖动系统中,下列哪个环节的作用是使电动机的运行速度稳定?A. 速度给定环节B. 速度反馈环节C. 电流反馈环节D. 速度调节环节答案:B9. 下列哪种电动机的调速范围较宽?A. 交流异步电动机B. 交流同步电动机C. 直流电动机D. 无刷电动机答案:C10. 下列哪种电动机的效率较高?A. 交流异步电动机B. 交流同步电动机C. 直流电动机D. 无刷电动机答案:B二、填空题(每题3分,共30分)11. 电力拖动系统的核心部件是______。
答案:电动机12. 电力拖动系统中,速度闭环控制的作用是______。
答案:减小系统的速度误差13. 电力拖动系统中,电流闭环控制的作用是______。
答案:减小系统的电流误差14. 电力拖动系统中,常用的调速方法有______、______、______。