二相步进电机控制系统的设计
步进马达控制电路设计

毕业设计题目步进电机运动控制系统设计学院XXXXXX年级专业应用电子专业学生姓名XXXX指导老师XXXX专业负责人XXXXX答辩日期步进电机运动控制系统设计摘要:步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
步进电机的调速一般是改变输入步进电机的脉冲的频率来实现步进电机的调速,因为步进电机每给一个脉冲就转动一个固定的角度,这样就可以通过控制步进电机的一个脉冲到下一个脉冲的时间间隔来改变脉冲的频率,延时的长短来具体控制步进角来改变电机的转速,从而实现步进电机的调速。
在本设计方案中采用AT89C51型单片机内部的定时器改变CP脉冲的频率从而实现对步进电机的转速进行控制,实现电机调速与正反转的功能关键词:步进电机单片机调速系统。
Stepper Motor Motion Control System Design Abstract:Stepper motor is the electrical impulse signals into angular displacement or linear displacement of the open-loop control components. In the non-overload case, the motor speed, and stop location depends only on pulse frequency and pulse number, regardless of the load change, that is, to add an electrical pulse signal, then turn one motor step angle. The existence of this linear relationship, coupled with only a periodic error of stepper motors without the accumulated error and so on. Made in terms of speed, position and other control areas to control the stepper motor used become very simple. Stepper motor speed control in general is to change the input frequency of stepper motor pulses to achieve the stepper motor speed, because the stepper motor to a pulse on each rotation a fixed angle, so that you can by controlling the stepper motor a pulse to the next a pulse time interval to change the pulse frequency, the length of delay to specific controls to change the angle stepper motor speed, in order to achieve speed control stepper motor. In this design the use of AT89C51 microcontroller-based timer to change the internal pulse frequency of CP in order to achieve the speed of stepper motor control, to achieve the function of motor speed and the positive inversionKeywords:Stepper Motor SCM Speed Control System摘要 (2)Abstract (3)第1章绪论 (5)第2章设计方案选择 (7)2.1 DC-DC主回路拓扑的方案选择 (7)2.2 控制方法的方案选择 (7)2.3 电流工作模式的方案选择 (7)2.4 提高效率的方案选择 (8)第3章软硬件分析 (10)3.1 整体设计 (10)3.2 理论分析与参数计算 (10)3.3 硬件核心电路 (11)3.4 软件设计 (12)第4章系统调试 (13)4.1 硬件调试 (13)4.2 软件调试 (13)4.3 软硬联调 (13)第5章指标测试 (15)5.1 测试仪器 (15)5.2 指标测试 (15)5.3 系统对题目的完成情况 (15)5.4 结果分析 (16)结论 (17)致谢 (18)参考文献 (19)步进电机最早是在1920年由英国人所开发。
两相四线步进电机
两相四线励磁式步进电机工作原理本章将介绍在嵌入式平台UP-NETARM2410-S中步进电机的实现;步进电机在各个领域诸如机器人、智能控制、工业控制等方面都有着广泛的应用空间,本章着重介绍步进电机的工作原理及编程实现步进电机驱动的方法,主要内容如下:l 步进电机的概述l 步进电机的工作原理l 和微处理器的总线连接方式l 驱动程序的编程l Linux 下用软件的方法实现步进电机的脉冲分配,用软件的方法代替硬件的脉冲分配器1.步进电机概述步进电机是一种能够将电脉冲信号转换成角位移或线位移的机电元件,它实际上是一种单相或多相同步电动机;单相步进电动机有单路电脉冲驱动,输出功率一般很小,其用途为微小功率驱动;多相步进电动机有多相方波脉冲驱动,用途很广;使用多相步进电动机时,单路电脉冲信号可先通过脉冲分配器转换为多相脉冲信号,在经功率放大后分别送入步进电动机各相绕组;每输入一个脉冲到脉冲分配器,电动机各相的通电状态就发生变化,转子会转过一定的角度称为步距角;正常情况下,步进电机转过的总角度和输入的脉冲数成正比;连续输入一定频率的脉冲时,电动机的转速与输入脉冲的频率保持严格的对应关系,不受电压波动和负载变化的影响;由于步进电动机能直接接收数字量的输入,所以特别适合于微机控制;步进电机的特性步进电机转动使用的是脉冲信号,而脉冲是数字信号,这恰是计算机所擅长处理的数据类型;从20世纪80年代开始开发出了专用的IC驱动电路,今天,在打印机、磁盘器等的OA装置的位置控制中,步进电机都是不可缺少的组成部分之一;总体上说,步进电机有如下优点:1.不需要反馈,控制简单;2.与微机的连接、速度控制启动、停止和反转及驱动电路的设计比较简单; 3.没有角累积误差;4.停止时也可保持转距;5.没有转向器等机械部分,不需要保养,故造价较低;6.即使没有传感器,也能精确定位;7.根椐给定的脉冲周期,能够以任意速度转__________动;但是,这种电机也有自身的缺点;8.难以获得较大的转矩9、不宜用作高速转动10.在体积重量方面没有优势,能源利用率低;11.超过负载时会破坏同步,速工作时会发出振动和噪声;步进电机的种类目前常用的步进电机有三类:1、反应式步进电动机VR;采用高导磁材料构成齿状转子和定子,其结构简单,生产成本低,步距角可以做的相当小,但动态性能相对较差;2、永磁式步进电动机PM;转子采用多磁极的圆筒形的永磁铁,在其外侧配置齿状定子;用转子和定子之间的吸引和排斥力产生转动,转动步的角度一般是;它的出力大,动态性能好;但步距角一般比较大;3、混合步进电动机HB;这是PM 和VR的复合产品,其转子采用齿状的稀土永磁材料,定子则为齿状的突起结构;此类电机综合了反应式和永磁式两者的优点,步距角小, 出力大,动态性能好,是性能较好的一类步进电动机,在计算机相关的设备中多用此类电机;2、步进电机的工作原理现以反应式三相步进电机为例说明其工作原理;三相步进电机的定子铁心上有六个形状相同的大齿,相邻两个大齿之间的夹角为60 度;每个大齿上都套有一个线圈,径向相对的两个线圈串联起来成为一相绕组;各个大齿的内表面上又有若干个均匀分布的小齿;转子是一个圆柱形铁心,外表面上圆周方向均匀的布满了小齿;转子小齿的齿距是和定子相同的;设计时应使转子齿数能被二整除;但某一相绕组通电,而转子可自由旋转时,该相两个大齿下的各个小齿将吸引相近的转子小齿,使电动机转动到转子小齿与该相定子小齿对齐的位置,而其它两相的各个大齿下的小齿必定和转子的小齿分别错开正负1/3 的齿距,形成“齿错位”,从而形成电磁引力使电动机连续的____苔K_转动下去;和反应式步进电动机不同,永磁式步进电动机的绕组电流要求正,反向流动,故驱动电路一般要做成双极性驱动;混合式步进电动机的绕组电流也要求正,反向流动,故驱动电路通常也要做成双极性;、步进电机的励磁方式步进电机有2相、4相和5相电机;在4相电机中有4组线圈,若电流按顺序通过线圈则使电机产生转动;2相电机中有2 组线圈;从图可以发现,在各线圈中引出中间端子,因此若以中间端子为基准即可实现4相,称这4为A、B、C、D 的励磁相;本实验使用的就是这种方式的4相电机,而励磁方式中有1 相单向励磁、2 相双向励磁和1-2 相单-双向励磁方式;此外,如果转动的方向不正确,可以交替1、2端子或3、4号端子1. 1相励磁方式按ABCD的顺序总是仅有一个励磁相有电流通过,因此,对应1个脉冲信号电机只会转动一步,这使电机只能产生很小的转矩并会产生振动,故很少使用;A B C DT1 1 0 0 0T2 0 1 0 0T3 0 0 1 0T4 0 0 0 1图-T4表示脉冲周期;ABCD表示电机的各相,1表示此时有一个脉冲,0表示没有2. 2相励磁方式按AB、BC、CD、DA的方式总是只有2相励磁,通过的电流是1相励磁时通过电流的2倍,转矩也是1相励磁的2 倍;此时电机的振动较小且应答频率升高,目前仍广泛使用此种方式;A B C DT1 1 1 0 0T2 0 1 1 0T3 0 0 1 1T4 1 0 0 1图-T4表示脉冲周期;ABCD表示电机的各相,1表示此时有一个脉冲,0表示没有脉冲3. 1-2相励磁方式即实验中所有的励磁方式,它按A、AB、B、BC、C、CD、D、DA的顺序交替进行线圈的励磁;与前述的2个线圈励磁方式相比,电机的转速是原来的1/2,应答频率范围变为原来的2倍;转子以滑动的方式转动;A B C DT1 1 0 0 0T2 1 1 0 0T3 0 1 0 0T4 0 1 1 0T5 0 0 1 0T6 0 0 1 1T7 0 0 0 1T8 1 0 0 1图-T8表示脉冲周期;ABCD表示电机的各相,1表示此时有一个脉冲,0表示没有脉冲3.与微处理器的连接方式步进电机并不是直接与CPU相连的;由于开发板上外部设备很多,各功能模块与微处理器的连接方式有专用线路,局部总线与扩展总线;局部总线与扩展总线局部总线与微处理器直接相连,扩展总线通过一个总线控制器74LVCH6245与局部总线相连;从CPU 出来的数据、地址、读写控制等信号构成局部总线;NAND FLASH、SDRAM和网卡芯片AX88796 直接挂在局部总线上的;局部总线经过四片74LVCH16245 驱动后作为扩展总线引到其他外设以及168Pin 扩展槽;由于数据线是双向的,所以16245芯片必须有方向控制信号,这里采用经过隔离后的写控制信号OE 作为数据线所在16245 芯片的方向控制线;当OE 有效时16245 芯片把扩展总线上的数据传输到局部总线上;当OE无效时反之;另外,必须注意,当系统对局部总线上的芯片读数据时OE 一样会起作用,这样就必须对局部总线和扩展总线进行总线仲裁,这里是外设所具有的四个片选信号nGCS1、3、4、5 用74HC21 相与后作为数据线所在的16245 芯片的输出使能控制线,只有当系统对扩展总线读操作,也就是上述四个片选之一有效时,16245 才能对局部总线输出数据,否则无论OE 如何都呈现高阻态;如下图:注:LDATA表示局部总线的数据线;DATA表示扩展总线的数据线;74LVCH16425芯片共有四块,限于篇幅仅举一片为例,其它三片芯片,一片用于数据线的低位连接,两片用于地址线的连接;注:由于片选线使用的负逻辑电平有效,所有此处用的是与门芯片74HC573扩展总线连接在芯片74HC573上,扩展总线的DATA0-DATA7分别接在74HC573的八个数据输入端上;74HC573芯片是由8个三态门组成的寄存器,它起到暂时保存信息和隔离总线的作用;芯片的输出I\O0—I\O3用于D\A数模转换,I\O4—I\O7用于步进电机的控制;描述:这个芯片采用的是八进位的D触发器,它可以驱动电容式或电阻式的负载;因此它特别适合应用于缓冲寄存器、IO端口、双向的总线控制器、和操作寄存器;当寄存器的使能端LE为高电平时,Q输出端和________D输入端一一对应;当LE为低电平时,输出端管脚Q输出的是寄存器中已被设定的值;当一个能开启缓冲功能的负逻辑管脚OE为0时,无论是在正常逻辑状态还是在高阻抗状态下,都能放置八位的输出数据;在高阻抗状态下;输出并没有负载或者进行控制总线;高阻态和改进的总线驱动可以在不拉起元件的情况下控制总线传输;OE端并不影响寄存器内部的操作;当输出端呈高阻状态时旧的数据可以被保存或者新的数据进行输入;步进电机模块的驱动电路74HC573芯片的输出I\O4—I\O7用于用来驱动步进电机的转动;数据线要首先接在步进电机模块的一个接口上;接口对信号进行放大,使之能够驱动步进电机;放大后的信号就可以直接的来使步进电路进行工作了;、开发板中的步进电机本开发板中使用的步进电机为四相步进电机;转子小齿数为64;系统中采用四路I/O 进行并行控制,ARM 控制器直接发出多相脉冲信号,在通过功率放大后,进入步进电机的各相绕组;这样就不再需要脉冲分配器;脉冲分配器的功能可以由纯软件的方法实现如上图所示;四相步距电机的控制方法有四相单四拍,四相单、双八拍和四相双四拍三种控制方式;步距角的计算公式为:θb=3600/mC k其中:m 为相数,控制方法是四相单四拍和四相双四拍时C 为1,控制方法是四相单、双八拍时C 为2,Z k 为转子小齿数;本系统中采用的是四相单、双八拍控制方法,所以步距角为360°/512;但步进电机经过一个1/8 的减速器引出,实际的步距角应为360°/512/8;开发平台中使用EXI/O 的高四位控制四相步进电机的四个相;按照四相单、双八拍控制方法,电机正转时的控制顺序为A→AB→B→BC→C→CD→D →DA;EXI/O 的高四位的值参见下表:十六进制二进制通电状态1H 0001 A3H 0011 AB2H 0010 B6H 0110 BC4H 0100 CCH 1100 CD8H 1000 D9H 1001 DA表5. 电机正转时,EXIO的高四位的值反转时,只要将控制信号按相反的顺序给出即可;可以通过宏SETEXIOBITMASKbit,mask来设置扩展I/O 口,其中mask 参数为0xf0;本实验使作的是1-2相励磁方式,还可以使用1相励磁方式和2相励磁方式;1相励磁方式的顺序是ABCD,因此只要设置数组char stepdata={0x10,0x20,0x40,0x80} 即可2相励磁方式的顺序是AB,BC,CD,DA, 因此只要设置数组char stepdata={0x30,0x60,0xc0,0x90} 即可要实现电机的反转,只需将上面数组的值按相反的顺序排列即可4、驱动程序的编程驱动程序采用C语言进行编程,下面是驱动程序中几个重要的函数;static int do_stepmotor_runchar phase //通过调用这个函数使步进电机转起来{unsigned int bak; //变量bak用于存放从寄存器中读出的值bak = readws3c2410_exio_base; //调用内核函数将基地址为s3c2410_exio_base寄存//器的值读出并放在bak中DPRINTK_STEP"s3c2410_exio_base content is %x\n", bak; //调试输出语句tiny_delay5; //延时函数,有延时功能bitops_mask_bitphase, 0xf0, &bak;//清除4-8位然后再设置phase传进来的位也是4-8位DPRINTK_STEP"s3c2410_exio_base content is%x\n", bak; //调试输出语句tiny_delay5;writewbak, s3c2410_exio_base; //调用内核函数将bak的值写入相应的寄存器中bak = readws3c2410_exio_base; //再次将寄存器的值读出DPRINTK_STEP"s3c2410_exio_base content is %x\n", bak;//利用调试语句再次将修改后的寄存器中的值输出,以验证其正确性tiny_delay5;DPRINTK_STEP"\n";return 0;}驱动程序主要通过上面这个函数来使步进电机转动;控制电机的是一个寄存器地址是s3c2410_exio_base=0x08000100,只要给它适当的值电机就可以运动起来;这个函数通过传递变量phase从应用程序获得数据;然后使用函数readw把寄存器的值就读出并送给bak;通过函数bitops_mask_bit修改bak的值;最后由writew写回到寄存器中;5、应用程序的编程1、步进电机模块步进电机模块和DA 模块是使用Bank1 地址空间扩展出来的IO口;共同使用驱动;在驱动程序中,与步进电机相关的主要在函数s3c2410_exio_ioctl:2、对应的应用源程序include <>include <>include <>include <sys/>define STEPMOTOR_IOCTRL_PHASE 0x13static int step_fd = -1;char STEP_DEV="/dev/exio/0raw"; //定义一个指针指向步进电机的驱动程序/ A, AB, B, BC, C CD, D, DA /char stepdata={0x10,0x30,0x20,0x60,0x40,0xc0,0x80,0x90};//各个相位对应的值void Delayint t //延时函数{int i;for;t>0;t--fori=0;i<400;i++;}//int mainint argc, char argv{int i = 0;ifstep_fd=openSTEP_DEV, O_WRONLY<0{printf"Error opening /dev/exio/0raw device\n";return 1;}/打开设备的驱动程序,由于LINUX把所有的设备都模拟成文件;step_fd=openSTEP_DEV,0_WRONLY实际调用的函数为:static int s3c2410_exio_openstruct inode inode, struct file filp //驱动程序中的设备打开程序/for ;; {for i=0; i<sizeofstepdata/sizeofstepdata0; i++ {ioctlstep_fd, STEPMOTOR_IOCTRL_PHASE,stepdatai;}/程序进入一个死循环,这样可以使电机在没有人为停止的状况下,一直的转动下去;第二层for语句循环一次即电机转动一周;函数ioctl对应函数s3c2410_exio_ioctl而这个函数最终将调用函数do_stepmotor_runchararg;使步进电机转动起来;/printf"Delay100\n";Delay100;}closestep_fd; //程序结束时关闭设备printf"Step motor start running\n";return 0;}__。
四维彩超探头电机驱动电路和控制设计

四维彩超探头电机驱动电路和控制设计摘要:四维彩超探头通过步进电机带动二维凸阵换能器按要求的速度和角度来回摆动,探头发收超声波,加上时间维度,通过图像融合,得到四维动态视频图像。
电机驱动板基于 FPGA 输出两路 SPWM 正余弦波。
波形通过功率电路处理输出满足电机驱动要求的双极性正余弦波。
为适配不同规格的四维探头,通过DAC 调压输出正负电压,电机相线增加电流检测。
ADC 读取输出的可调电压值,及电机相线采样波形参数,整个驱动形成自检和闭环控制。
优化驱动电路和控制流程,提高电机控制精度,提升四维图像质量。
关键词:4D探头;步进电机;SPWM驱动;闭环;自检1绪论四维(four-dimensional,4D)彩超探头通过步进电机带动二维凸阵换能器摆动,二维凸阵探头摆动扫描过程中,超声前端控制换能器向人体发射超声波,当超声波到达声阻抗不同的界面时反射回波信号,其能够反映人体内不均匀组织的分布情况。
超声前端接收回波信号后,超声成像系统构建被检测部位的实时三维超声图像,加上时间维度,通过图像融合,构建四维动态视频图像。
4D探头的两相混合步进电机是通过脉冲控制角位移和改变脉冲频率调速。
步进电机有定位精度高,无积累位置误差,开环控制的优点。
步进电机控制方式多样,其驱动方式和运行性能关系很大。
驱动方式主要有常规 PWM 方波驱动和SPWM 正弦波脉宽调制驱动。
步进电机通过采用细分驱动控制的方式解决步进电机存在的步距脚大、转速不平稳,低速震动,噪音大,影响精度等缺点。
相比传统PWM,SPWM细分步距脚小,分辨率高。
4D探头步进电机一般采用 SPWM 恒流细分驱动,其是基于电机绕组电流波形控制的微步驱动方式。
MCU 或 FPGA 输出两路相位相差90°的SPWM正余弦波,通过对电流细分实现细分步距脚,使电机恒流平稳运行。
传统驱动电路功率部分采用双H桥MOS管实现SPWM恒流斩波细分驱动。
采样MOS管能提供大电压大电流,4D探头一般采用微型的小步进电机,额定电压和电流都比较小,一般采用两路功率运放,分别输出正负正余弦波,驱动电机运动和换相。
步进电机毕业设计论文
引言步进电动机是一种将电脉冲信号转换成角位移或线位移的精密执行元件,由于步进电机具有控制方便、体积小等特点,所以在数控系统、自动生产线、自动化仪表、绘图机和计算机外围设备中得到广泛应用。
微电子学的迅速发展和微型计算机的普及与应用,为步进电动机的应用开辟了广阔前景,使得以往用硬件电路构成的庞大复杂的控制器得以用软件实现,既降低了硬件成本又提高了控制的灵活性,可靠性及多功能性。
在当今社会的各个领域步进电机无处不在,应用领域涉及机器人、工业电子自动化设备、医疗器件、广告器材、舞台灯光设备、印刷设备、计算机外部应用设备等等。
因此,设计出高精确度、实时监控、语音提示的步进电机具有重要的现实意义和实用价值。
基于单片机的步进电机控制系统,能够有效地对步进电机转速、方向等进行控制。
本设计采用16位单片机AT89S52对步进电机进行控制,通过I/O口输出的具有时序的方波作为步进电机的控制信号,信号经过驱动芯片驱动步进电机;同时,用按键来对电机的状态进行控制,并用数码管显示电机的转速,1 课题背景步进电机是机电一体化产品中的关键组件之一,是一种性能良好的数字执行元件,随着计算机应用技术、电子技术和自动控制技术在国民经济各个领域中的普及与深入,步进电机的需求量越练越大。
随着工业技术的不断发展,以及同类产品的不断出现,步进电机面临着前所未有的挑战。
但近30年来,数字技术、计算机技术和永磁材料的迅速发展,推动步进电机的发展,为步进电机的应用开辟了广阔的前景,近几年来,步进电机需求量一直呈现出较快的增长速度,其中扫描仪、打印机、传真、DVD-ROM/CD-ROM驱动器、空调及多功能自动化办公设备等应用对步进电机的需求增长最强。
此外由于USB2.0的日益流行促进了高分辨率扫描仪的销售,步进电机向着小型、薄型和更小的步进角度发展。
步进电机有着方方面面重要应用,如何对其进行有效控制,使其能够发挥最大的优势是各个行业技术开发人员所共同关注的,本次设计了一套简单的通用控制系统,对步进电机的转速、方向实行手动控制,并能通过数码管显示其转速。
第3章 步进电动机的控制-1

这种反应式步进电动机的步距角较大,不适合一般用途的要求。
4.小步距角步进电动机
图3-1所示为三相反应式步进电动机。设m为相数,z为 转子的齿数则齿距:
tb 360 z
因为每通电一次(即运行一拍),转子就走一步,各 相绕组轮流通电一次,转子就转过一个齿距。故步距角:
b
齿距 拍数 齿距 Km 360 Km z
通电方式: 从一相通电改换成另一相通电,即通电方式改变一次叫 “一拍”。步进电动机有单相轮流通电、双相轮流通电和单 双相轮流通电的方式。
3.多段反应式步进电机结构及工作原理
前面介绍的单段反应式步进电机是按 径向分相的,此外,还有一种反应式 步进电机是按轴向分相,这种步进电 机又称为多段反应式步进电机。 多段反应式步进电机是沿轴向分成磁 性相对独立的几段,每一段都有一组 励磁绕组,形成一相,因此,三相电 动机有三段,其结构如图3-2所示。 图3-2 三段三相反应式步进电动 机结构原理图
一、步进电动机的种类
1.按运动方式来分:分为旋转运动、直线运动、平面运动(印刷绕组式)和 滚切运动式步进电机。 2.按工作原理来分:分为反应式(磁阻式)、电磁式、永磁式、永磁感应式 (混合式)步进电机。 3.按其工作方式来分:分为功率式和伺服式。前者输出转矩较大,能直接带 动较大的负载;后者输出转矩较小,只能带动较小的负载,对于大负载需通 过液压放大元件来传动。 4.按结构来分:分为单段式(径向式)、多段式(轴向式)、印刷绕组式。 5.按相数来分:分为三相、四相、五相、六相等。 6.按使用频率来分:分为高频步进电机和低频步进电机。 不同类型步进电机其工作原理、驱动装臵也不完全一样,但其工作过程 基本是相同的。
(3-2)
若通电方式和系统的传动比已初步确定,则步距角应满足:
步进电机实验报告
步进电机实验报告北京⼯业⼤学电⼦课程设计报告(数电部分)题⽬:步进电机⼀、设计题⽬步进电机控制电路⼆、设计任务和设计要求1.设计任务:本课题要求设计⼀个步进电机的控制电路,该电路能对步进电机的运⾏状态进⾏控制。
2.设计技术指标及设计要求:基本要求:(1).能控制步进电机正转和反转及运⾏速度,并由LED显⽰运⾏状态。
(步进电机⼯作⽅式可为单四拍或双四拍)。
A.单四拍⽅式,通电顺序为A—B—C—D—AB.双四拍⽅式,通电顺序为AB—BC—CD—DA—AB(2).测量步进电机的步距⾓。
(通过实测步进电机旋转⼀周所需要的脉冲数,推算出步进电机的步距⾓)。
扩展要求:设计步进电机的⼯作⽅式为四相⼋拍。
C.四相⼋拍⽅式,通电顺序为A—AB—B—BC—C—CD—D—DA—A(4).参考元器件:步进电机,发光⼆极管,续流⼆极管IN4004,复合三极管TIP122;5Ω(1W)电阻,其它电容、电阻若⼲。
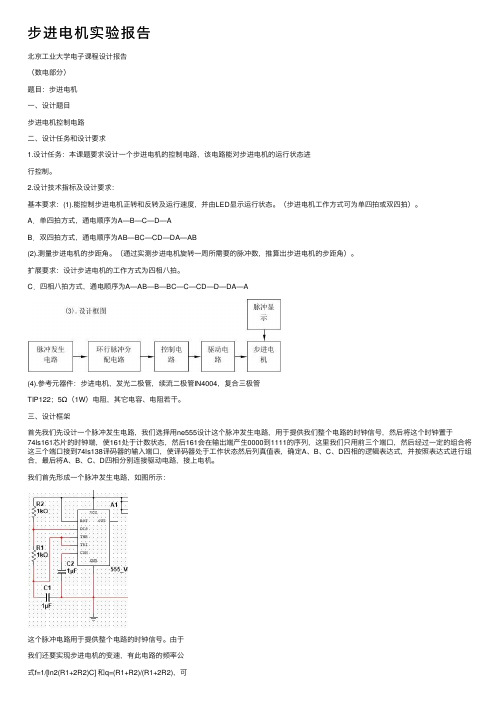
三、设计框架⾸先我们先设计⼀个脉冲发⽣电路,我们选择⽤ne555设计这个脉冲发⽣电路,⽤于提供我们整个电路的时钟信号,然后将这个时钟置于74ls161芯⽚的时钟端,使161处于计数状态,然后161会在输出端产⽣0000到1111的序列,这⾥我们只⽤前三个端⼝,然后经过⼀定的组合将这三个端⼝接到74ls138译码器的输⼊端⼝,使译码器处于⼯作状态然后列真值表,确定A、B、C、D四相的逻辑表达式,并按照表达式进⾏组合,最后将A、B、C、D四相分别连接驱动电路,接上电机。
我们⾸先形成⼀个脉冲发⽣电路,如图所⽰:这个脉冲电路⽤于提供整个电路的时钟信号。
由于我们还要实现步进电机的变速,有此电路的频率公式f=1/[ln2(R1+2R2)C] 和q=(R1+R2)/(R1+2R2),可知,我们只需改变R1的电阻⼤⼩即可。
这样会对时钟频率产⽣影响,从⽽改变电机的转速。
接下来是环形脉冲分配电路。
⾸先我们写出我们需要的真值表,然后计算出逻辑表达式,最后根据逻辑表达式进⾏电路的连接。
基于PLC的步进电机的开环控制系统

武汉理工大学华夏学院课程设计报告书题目:基于PLC的步进电机的开环控制系统设计系名:信息工程系专业班级:自动化1093姓名:叶健学号:10212409309指导教师:乔志刚2012 年 1 月 6 日目录1.引言 ................................................................................................................................. - 2 -2.课程设计项目名称 ............................................................................................................ - 3 -基于PLC的步进电机的开环控制系统设计...................................................................... - 3 - 3.课程设计目的及要求....................................................................................................... - 3 -3.1 设计目的................................................................................................................ - 3 -3.2控制要求:...................................................................................................... - 3 - 4电路设计........................................................................................................................... - 4 -4.1步进电机电路原理图............................................................................................... - 4 -4.2工作原理 ................................................................................................................ - 4 -5 PLC硬件阻态表 ................................................................................................................ -6 -5.1硬件阻态 ................................................................................................................ - 6 -5.2编程元件地址分配表............................................................................................... - 6 -5.3 线性化控制程序(单四拍) (7)5.4 结构化控制程序(单四拍)...................................................................................- 10 -5.4.1结构化OB1主控制程序: ............................................................................- 11 -5.4.2结构化FC1分控制程序: ............................................................................- 12 -6. 程序调试说明...............................................................................................................- 14 -1.引言可编程序控制器(Programmable Logic Controller)简称PLC,是在继电器控制和计算机控制的基础上开发出来的,并逐渐发展成以微处理器为核心,把自动化技术、计算机技术、通讯技术融为一体的新型工业自动控制装置。
第3章步进电动机的控制
升速 恒速 减速 低速
起点
终点
(时间) t
图3-24
点、位控制中的加减速控制
15
变速控制的方法有:
改变控制方式的变速控制:最简单的变速控制可利用改变步进电 机的控制方式实现。例如:对于三相步进电机系统,启动或停止时 用三相六拍,大约0.1s以后,改用三相三拍,快到达终点时再采用 三相六拍,以达到减速控制的目的。 均匀地改变脉冲时间间隔的变速控制:步进电机的加速(或减速) 控制,可以用均匀地改变脉冲时间间隔来实现。 采用定时器的变速控制:单片机控制系统中,用单片机内部的定 时器来提供延时时间。方法是将定时器初始化后,每隔一定的时间, 由定时器向CPU申请一次中断,CPU响应中断后,便发出一次控制脉 冲。此时只要均匀地改变定时器时间常数,即可达到均匀加速(或 减速)的目的。这种方法可以提高控制系统的效率。
脉冲 方向控制
步进控制器
功率放大器
步进电机
负载
图3-19 步进电机控制系统的组成
2
随着电子技术的发展,除功率驱动电路之外,其它硬件电路均可由软 件实现。采用计算机控制系统,由软件代替步进控制器,不仅简化了 线路,降低了成本而且可靠性也大为提高,同时,根据系统的需要可 灵活改变步进电机的控制方案,使用起来很方便。典型的微型机控制 步进电机系统原理图如图3-20所示。 使用微型机对步进电机进行控制有串行和并行两种方式。 步 进 电 机
6
二、步进电动机的闭环控制
在开环步进电动机系统中,电动机的输出转矩在很大程度上取决于驱 动电源和控制方式。对于不同的步进电动机或同一种步进电动机而不 同负载,励磁电流和失调角发生改变,输出转矩都会随之发生改变, 很难找到通用的控速规律,因此,也很难提高步进电机的技术指标。 闭环系统是直接或间接地检测转子的位置和速度,然后通过反馈和适 当处理自动给出驱动脉冲串。因此采用闭环控制可以获得更精确的位 置控制和更高、更平稳的转速,从而提高步进电动机的性能指标。 步进电动机的输出转矩是励磁电流和失调角的函数。为了获得较高的 输出转矩,必须考虑到电流的变化和失调角的大小,这对于开环控制 来说是很难实现的。
基于单片机的步进电机控制系统设计方案

D10-基于单片机旳步进电机控制系统一、理解什么是步进电机以及其工作原理步进电机是数字控制电机,步进电机旳运转是由电脉冲信号控制旳,其角位移量或线位移量与脉冲数成正比,每个一种脉冲,步进电机就转动一种角度(不距角)或前进、倒退一步。
步进电机旋转旳角度由输入旳电脉冲数确定,因此,也有人称步进电机为数字/角度转换器。
步进电机旳各相绕组按合适旳时序通电,就能使步进电机转动。
当某一相绕组通电时,对应旳磁极产生磁场,并与转子形成磁路,这时,假如定子和转子旳小齿没有对齐,在磁场旳作用下,由于磁通具有力图走磁阻最小途径旳特点,则转子将转动一定旳角度,使转子与定子旳齿互相对齐,由此可见,错齿是促使电机旋转旳原因。
二、步进电机旳特点(1)步进电机旳角位移与输入脉冲数严格成正比,因此当它转一转后,没有合计误差,具有良好旳跟随性。
(2)由步进电机与驱动电路构成旳开环数控系统,既非常以便、廉价,也非常可靠。
同步,它也可以有角度反馈环节构成高性能旳闭环数控系统。
(3)步进电机旳动态响应快,易于启停、正反转及变速。
(4)速度可在相称宽旳范围内平滑调整,低速下仍能保证获得很大旳转矩,因此一般可以不用减速器而直接驱动负载。
(5)步进电机只能通过脉冲电源供电才能运行,它不能直接用交流电源或直流电源。
(6)步进电机自身旳噪声和振动比较大,带惯性负载旳能力强。
三、步进电机旳控制步进电机旳控制重要包括换相次序旳控制、速度控制、速度控制、加减速控制等,控制系统就是运用单片机旳功能实现以上控制旳系统,即本次设计旳目旳。
四、示意图五、硬件设计计划本设计旳硬件电路只要包括控制电路、最小系统、驱动电路、显示电路四大部分。
最小系统只要是为了使单片机正常工作。
控制电路只要由开关和按键构成,由操作者根据对应旳工作需要进行操作。
显示电路重要是为了显示电机旳工作状态和转速。
驱动电路重要是对单片机输出旳脉冲进行功率放大,从而驱动电机转动。
(1)控制电路根据步进电机旳工作原理可以懂得,步进电机转速旳控制重要是通过控制通入电机旳脉冲频率,从而控制电机旳转速。
步进电机驱动器设计及技术改进
步进电机驱动器设计及技术改进摘要:本文分析了步进电机的应用及其驱动技术研究,给出了设计软件程序实例、硬件原理图及输出波形图,并提出了相应的改进措施。
关键词:步进电机环形分配细分步进电机结构简单而且控制方便,在机械及自动控制等领域应用较普遍,但是步进电机也存在步距角较大、低频振动等缺点,如需在精度要求较高的工程中应用,除要提高制造工艺,选取高精度高性能的步进电机外,对步进电机驱动技术的研究也是很有必要的。
1 步进电机工作原理步进电机是一种将电脉冲信号转化为角位移的执行机构,它有别于普通的旋转电机,步进电机的旋转运动和输入的脉冲个数有严格的对应关系,并以此来控制其角位移量,同时依靠步进电机特有的自锁能力使其保持在目标位置。
2 驱动器设计步进电机运动方式的特殊性决定了它需用一个专用的驱动器来供电,驱动器主要功能是对输入脉冲分配后再进行功率放大,放大后的功率信号按特定顺序轮流加到电机绕组的两端,控制步进电机运动。
驱动器主要由环形分配器、功率放大器及其他控制电路组成,其中环形分配器是步进电机驱动器设计的关键。
目前的DSP技术发展较快,特别是美国TI公司的2000系列DSP 是专为控制各种电机设计的,本文以TMS320LF2407控制两相四拍的步进电机为例,主要介绍最常用的两种设计环形分配器的方案:一是通过DSP的PWM口,在程序里对EV A或者EVB的4个PWM口进行精确的时序分配,利用纯软件的方法实现环形分配器;二是以专业的芯片电路为基础,如集成电路芯片L297+L298组成得驱动电路或者THB7128芯片等,利用DSP的I/O口即可实现对环形分配器的控制。
两种方案各有优缺点,下面详细介绍两种方案实现方法。
2.1 硬件实现环形分配器本文选取比较常用的集成电路芯片L297和L298的组合,该方案特点是控制简单,只需要对L297芯片的几个输入端进行控制即可,其中包括脉冲信号CLK、方向控制信号CW/CCW、半步和整步选择控制信号HALF/FULL 以及使能信号EN。
二相混合式步进电机SPWM细分驱动器的FPGA设计

21 0 1年
第 2期
2月
微 电机
M 1 ROM O ORS C
Vo. 4. No 2 J4 .
Fe 2 1 b. 01
二 相 混 合 式 步 进 电机 S WM 细 分 驱 动 器 的 F G P P A设 计
杨 秀增 ,黄 露
5 20 ) 320 ( 西 民族 师 范学 院 物 理 与 信 息 技 术 系 ,广 西 崇 左 市 广
中 图分 类 号 :T 8 . M33 6 文 献 标 志码 :A 文章 编 号 :10 —88 2 1 )200 —3 0 16 4 (0 10 — 120
De in o PW M u ii e ii g f r Two・ a e sg fS S bd vd d Drv n o ph s
Hy r d St p M o o i b i e t r Usng FPGA
YANG u e g, HUAN u Xi z n L
( eat etfP yi n n r ai ehl y u n x N r a nvrtf r D p r a o hs s dI om t nTcoo ,G a g i om l i sy o m ca f o g U e i
0 引 言
步进 电机 的性 能 与其 驱 动 方 式 密切 相 关 ,细分
组 中的电流 的控 制来 实 现 的 。通 常 步进 电机 细分 驱 动有 等 电流 细分 驱 动 法 和 电流 矢 量恒 幅均 匀旋 转 法 j ,等 电流细分 驱动法 未能 实现恒 转矩 细分 驱动 ,
驱 动在消 除步机 电机低 频 振 荡 ,改 善步 进 电机 的 高 频失 步率 和提高 步 进 电机 的分 辨 率 等方 面具 有较 好
两相步进电机原理

两相步进电机原理两相步进电机是一种常用的电动机,其工作原理是通过交替激励两相线圈来实现电机转动。
下面将详细介绍两相步进电机的原理。
两相步进电机由两组线圈组成,分别称为A相和B相。
每组线圈都是由多个绕组组成,这些绕组分别沿电机的固定轴线均匀分布。
两相步进电机主要靠磁力原理来工作。
当A相线圈通电时,会在电机中产生一个磁场。
同样地,当B相线圈通电时,也会在电机中产生一个磁场。
这两个磁场的位置是固定的,它们的极性是相同的,即同为南极或者同为北极。
当A相线圈通电时,磁场中的北极会被吸引到电机中的南极,从而产生一个力矩使电机转动。
同样地,当B相线圈通电时,也会产生一个力矩使电机转动。
因此,通过交替通电A相和B相线圈,可以实现电机的连续转动。
两相步进电机的转动方式有两种,分别为全步进和半步进。
全步进是指每次只激励一组线圈,即A相或者B相。
当激励A相线圈时,电机转动一个固定的步进角度(通常为1.8度),然后停止。
再激励B相线圈时,电机再转动一个步进角度,如此循环。
全步进转动方式简单,但是精度相对较低。
半步进是指在每个步进角度中,先激励A相线圈,然后再激励B相线圈,这样可以实现更小的转动角度。
例如,在一个步进角度内,先激励A相使电机转动0.9度,然后再激励B相使电机再转动0.9度。
通过这种方式,可以实现更高的转动精度。
在实际应用中,两相步进电机通过驱动电路来控制线圈的通断,从而实现电机的转动。
常见的驱动电路有双H桥驱动电路和脉冲驱动电路。
双H桥驱动电路可以实现正转、反转和制动等操作,而脉冲驱动电路则通过输入脉冲信号来控制电机的转动步进角度和速度。
总结一下,两相步进电机通过激励A相和B相线圈来产生磁场,从而实现电机的转动。
全步进和半步进是两种常见的转动方式。
它们在自动控制系统、仪器仪表以及机械设备等领域有广泛应用。
这些都是两相步进电机工作原理的基本概念。
51单片机控制两相四线步进电机

源程序如下:ENA EQU P1.0 ENB EQU P1.1IN1 EQU P1.2IN2 EQU P1.3IN3 EQU P1.4IN4 EQU P1.5 SWITCH EQU P3.3 FAST EQU P3.6 SLOW EQU P3.5CYCLENUM EQU 50H ;存放对应定时循环次数TEMP EQU 53H ;存放按键次数。
初值为5,每按加速叠加1,按减速递减MARK EQU 56H ;启动停止标识LEDBUF EQU 57HORG 0AJMP START;*****************检测是否开启启动电机键***************************START:MOV P0,#0 ;清显示SETB MARK ;预启动电机工作,标识为1MOV TEMP,#5 ;开始工作于5HzMOV CYCLENUM,#01H ;循环1次JNB SWITCH,NEXT ;按键按下?SJMP START ;没有返回继续检测NEXT:CALL DELAY ;消抖确认JNB SWITCH,MAIN ;再次确认按键,不为1说明按键按下SJMP START ;没有按下,继续检测;*****************开始运行电机***************************************MAIN:MOV A,TEMPMOV DPTR,#TAB4MOVC A,@A+DPTRMOV LEDBUF,A ;送显示CALL DISPLAYLOOP:JB MARK,WORK ;检测运行标识是否为1,为1则继续运行,为0则停止运行NOTWORK:CLR ENACLR ENBSJMP STARTWORK:MOV P1,#000010111B ;步进电机运行方式为两相四拍CALL TIMERCALL TESTSTOPMOV P1,#000011011B ;第二拍CALL TIMERCALL TESTSTOPMOV P1,#000101011B ;第三拍CALL TIMERCALL TESTSTOPMOV P1,#000100111B ;第四拍CALL TIMERCALL TESTSTOPCALL TESTKEYSJMP MAIN;***************************检测是否有按键按下************************TESTKEY:SETB FASTSETB SLOWNEXT1:JNB FAST,YES2NEXT2:JNB SLOW,YES3SJMP RETURN ;都没有键按下,则返回YES2:MOV A,TEMP ;FAST按下,若此时temp等于9,则保持速度不变,若小于则加1 CJNE A,#9,CANFASTDEC ACANFAST:INC AMOV TEMP,ASJMP RETURNYES3:MOV A,TEMPCJNE A,#1,CANSLOWINC ACANSLOW:DEC AMOV TEMP,ARETURN:RETTESTSTOP:SETB SWITCHJNB SWITCH,GOSJMP ENNDGO:CALL DELAYJNB SWITCH,YESSTOPSJMP ENNDYESSTOP:CPL MARKENND:RET;***********************定时器设置******************* TIMER:MOV TMOD,#10H ;T1工作于定时方式1CALL TIMERSETSETB TR1SETB EASETB ET1 ;启动定时器工作WAIT:JBC TF1,HERESJMP WAIT ;定时未到继续等待HERE:DJNZ CYCLENUM,TIMER ;循环次数未满继续定时MOV A,TEMPMOV DPTR,#TAB3MOVC A,@A+DPTRMOV CYCLENUM,ARETTIMERSET:MOV A,TEMPMOV DPTR,#TAB1 ;获取定时器高位MOVC A,@A+DPTRMOV TH1,A ;存放至定时器高位MOV A,TEMPMOV DPTR,#TAB2MOVC A,@A+DPTR ;获取定时器定位MOV TL1,A ;存放至定时器低位RET;***********************50ms延时**********************DELAY:MOV R0,#100DL1:MOV R1,#10DJNZ R1,$DJNZ R0,DL1RET;************显示子程序****************************DISPLAY:CLR P2.7CLR P2.6CLR P2.5SETB P2.4 ;关闭高三位,保留个位MOV P0,LEDBUFRETTAB1: DB 15H,0AH,07H,05H,04H,03H,03H,02H,02H ;定时器高位TH1TAB2: DB 0B3H,0D9H,3BH,6CH,57H,0A5H,19H,0B6H,69H ;定时器地位TL1 TAB3: DB 01H,01H,01H,01H,01H,01H,01H,01H,01H ;循环次数CYCLENUM TAB4: DB 3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FH ;数码显示0~9。
两相4线步进电机驱动

为一个转向。
ab - ab~ - a~b~ - a~b
为反向。
8拍方式的 G
H(时序)
A
11000001
A-
00011100
B
01110000
B-
00000111
这里用的是8拍的方式。程序:
/*** ******************************************************************* **程序功能: **芯片型号:STC11F16XE **晶振频率:22.1184M **备注说明: *******************************************************************/ //以下为所需的头文件 //#include<absacc.h> //#include<string.h> //#include<stdio.h> //#include <INTRINS.H> #include <reg52.H> //定义关键字方便使用 #define uchar unsigned char #define uint unsigned int
**函数原型:main()
**函数功能: **输入参数:无 **输出参数:无 **备注说明:完成程序的主要功能
*******************************************************************/ main() {
unsigned char c; while(1) //主循环 {
void delay(void)
{ unsigned char a,b,c; for(c=18;c>0;c--) for(b=19;b>0;b--) for(a=23;a>0;a--);
基于PLC的步进电机运动控制系统设计
机电工程系基于PLC的步进电机运动控制系统设计专业:测控技术与仪器指导教师:xxx姓名: xxx _______________(2011年5月9日)目录一、步进电机工作原理 (1)1。
步进电机简介 (1)2。
步进电机的运转原理及结构 (1)3。
旋转 (1)4。
步进电动机的特征 (2)1)运转需要的三要素:控制器、驱动器、步进电动机 (2)2)运转量与脉冲数的比例关系 (2)3)运转速度与脉冲速度的比例关系 (2)二、西门子S7-200 CPU 224 XP CN (2)三、三相异步电动机DF3A驱动器 (3)1。
产品特点 (3)2。
主要技术参数 (3)四、PLC与步进电机驱动器接口原理图 (5)五、PLC控制实例的流程图及梯形图 (5)1.控制要求 (5)2。
流程图 (5)3.梯形图 (6)六、参考文献 (6)七、控制系统设计总结 (6)基于PLC的步进电机运动控制系统设计一、步进电机工作原理1.步进电机简介步进电机是一种将电脉冲转化为角位移的执行机构。
通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;也可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单2.步进电机的运转原理及结构电机转子均匀分布着很多小齿,定子齿有三个励磁绕阻,其几何轴线依次分别与转子齿轴线错开。
0、1/3て、2/3て,即A与齿1相对齐,B与齿2向右错开1/3て,C与齿3向右错开2/3て,A’与齿5相对齐,(A'就是A,齿5就是齿1)3.旋转如A相通电,B,C相不通电时,由于磁场作用,齿1与A对齐,(转子不受任何力,以下均同)。
步进电动机正反转控制系统设计

成绩课程设计报告题目步进电动机正反转控制系统设计课程名称微机原理及应用院部名称机电工程学院专业电气工程及其自动化班级学生姓名学号课程设计地点工科楼 C304课程设计学时20指导教师金陵科技学院教务处制摘要步进电机是工业生产过程控制及仪表中的主要控制元件之一。
在数字控制系统中,由于它可以直接接受计算机输出的数字信号,而不需要进行数/模/ 转换,用起来非常方便。
此次微机原理的课程设计,是对计算机系统和微处理器以及汇编语言、外围芯片的研究学习。
本设计就是基于8086CPU的微机控制,利用汇编语言、74273、74LS244 芯片、ULN2003A驱动等综合应用实例,连接上硬件驱动电机电路,通过对按键输入信号的检测实施对步进电动机正反转的控制。
关键词:8086CPU;正反转;步进电机目录摘要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯一、概述⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1.1课程设计的目的⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1.2课程设计的要求⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯二、总体设计方案及说明⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯2.1系统总体设计方案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯2.2系统工作框图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯三、系统硬件电路设计⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯3.1 8086微处理器的简介⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯3.2 74273和74LS244芯片的简介⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯3.3 ULN2003A的简介⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯3.4步进电机的工作原理⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯3.5微型处理器最小控制模块⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯3.6按键输入模块⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯3.7驱动电动机模块⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯3.8系统电路原理图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯四、系统软件部分设计⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯4.1系统流程图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯4.2系统软件源程序⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯五、课程设计体会⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯5.1系统调试⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯5.2问题分析与解决方案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯5.3心得体会⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯六、参考文献⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯附录:原理图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯一、概述1.1 课程设计的目的通过本课程设计,使学生掌握控制系统设计的一般步骤,掌握系统总体控制方案的设计方法。
基于专用控制芯片的步进电机运动控制系统设计
信 , 加 了 C N接 口 , 增 A 为后 续 多 轴 联 动 、 产 线 网 络 化 作 功 生
能 扩 展
收 稿 日期 :01 — 3 0 2 2 0—3
10 3—
C N模 块 的 A 9 C N18主 要 考 虑 到 系 统 的 稳 定 性 、 少 电 A T0 A 2 减
稿 件 编 号 :0 2 3 2 2 10 0 2
smu t n o s i l eul a y.a d c n p r r al e lt r ia a k u o o u l . h s e u ti dc t st a h e in o o t l n a e f m l r a i c t l s sa t n mo sy T e t t s l n ia e t e d s f n r o me i c t e r h t g c o
等 )下 位 机 ( 控 制 器 ) 责 接 收 指 令 并 对 指 令 进 行 处 理 以 , 微 负 输 出步 进 电机 运 动 所 需 要 的 脉 冲 信号 和方 向信 号 。
点 , 给 系 统 的 可 靠 性 带 来 了较 大 的 隐 患 。 随 着 电子 技 术 的 这 发 展 , 进 电 机 的很 多 功 能 单 元 如 加 减 速 控 制 、 步 控 制 等 步 微 都 走 向 模 块 化 . 且 具 有 体 积 小 、 量 轻 、 作 稳 定 、 够 实 并 重 工 能 现 多 轴 控 制 等 优 点 , 给 步 进 电机 控 制 系 统 的 设 计 和 开 发 带 这
a d f xb l y o e s se n l i i t ft y t m,t e d sg fse p n trc n r l y tm a e n s e ili tg ae i u t i s g e td i e i h h e in o t p ig moo o to s s e b s d o p c a e r td cr i s u g se n n c s
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要随着微电子和计算机技术的发展,步进电机的需求量与日俱增,它广泛用于打印机、电动玩具等消费类产品以及数控机床、工业机器人、医疗器械等机电产品中,其在各个国民经济领域都有应用。
研究步进电机的控制系统,对提高控制精度和响应速度、节约能源等都具有重要意义。
本控制系统的设计,由硬件设计和软件设计两部分组成,完成二相步进电机的控制。
其中,硬件设计主要包括单片机系统、按键控制模块、步进电机驱动模块、数码显示模块等功能模块的设计,以及硬件电路在PROTUS上的仿真。
软件设计包括主程序以及各个模块的控制程序,最终实现对步进电机转动方向及转动模式(四拍,八拍)的控制,并且将步进电机的步进数动态显示在LED数码管上。
本系统具有智能性、实用性及可靠性的特点。
关键词:二相步进电机单片机四拍八拍 LED显示AbstractWith the development of microelectronics and computer art, step-by-step electric motor need amounts increase with each passing day , it is used for the products consuming a kind such as printer , electricity-driven toy broadly and numerical control machine tool , electromechanical products such as industry robot , medical apparatus and instruments are hit by, the person applies to each national economy field It both. Study step-by-step electric motor navar , having importance to improving under the control of accuracy and responding to speed , the energy saving and so on. Control systematic design originally, the made up of designing two parts from the hardware design and the software , controlling accomplishing two-phase step-by-step electric motor. And among them, the hardware design includes the monolithic machine system mainly , button under the control of module , step-by-step electric motor drive function module design such as module , numerical code display module, hardware circuit emulation on PROTUS. The software designs under the control of procedure including the host procedure and each modules , realizes controlling turning direction to step-by-step electric motor and turning the pattern (four shoot , eight shoots) ultimately , step-by-step electric motor step-by-step number development is demonstrated and on LED numerical code. System has intelligence , pragmatism and the reliability characteristic.Keywords:Electric motor MCU Four shoots Eight shoots LEDdisplay目录摘要 (2)1总体分析与解决方案 (1)1.1问题的提出与简述 (1)1.2设计目的级系统功能 (1)2 硬件电路设计模块 (2)2.1单片机系统原理 (2)2.2二相步进电机工作原理分析 (5)2.3 L298驱动电路设计 (7)2.4 四位LED数码管显示设计 (7)2.5总体硬件仿真设计 (10)3软件设计模块 (11)3.1整体流程分析与设计 (11)3.2步进电机四拍,八拍流程分析与设计 (11)3.3显示模块流程分析与设计 (14)4 系统调试运行与仿真 (15)5 小结与心得体会 (16)参考文献 (17)附录 (18)二相步进电机控制系统的设计1总体分析与解决方案1.1问题的提出与简述如今,电动机在工农业生产、人们日常生活中起着十分重要的作用。
步进电机是最常见的一种控制电机,在各领域中得到广泛应用。
步进电机作为执行元件,是机电一体化的关键产品之一, 广泛应用在各种自动化控制系统中。
随着微电子和计算机技术的发展,步进电机的需求量与日俱增,在各个国民经济领域都有应用。
步进电机是一种将电脉冲转化为角位移的执行机构。
当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
步进电机可以作为一种控制用的特种电机,其优点是结构简单、运行可靠、控制方便。
尤其是步距值不受电压、温度的变化的影响、误差不会长期积累的特点,给实际的应用带来了很大的方便。
它广泛用于消费类产品(打印机、照相机)、工业控制(数控机床、工业机器人)、医疗器械等机电产品中。
研究步进电机的控制和测量方法,对提高控制精度和响应速度、节约能源等都具有重要意义。
为此,本文设计了一个步进电机控制系统,可以实现对步进电机转动方式和转动方向的控制。
1.2设计目的及系统功能本设计的目的是以单片机为核心设计出一个二相步进电机控制系统。
本系统采用ATmega128作为控制单元,通过按键实现对二相步进电机转动方向及转动模式的控制,并且将步进电机的步进步数动态显示在LED数码管上。
通过本课题,查阅相关资料,由于本学期所学单片机课程型号为ATmega128,了解了ATmega128单片机控制的一些基本技术,掌握其控制系统的分析方法与实现方法,能对单片机外围电路设计进行系统学习与掌握;另一方面,通过设计步进电机控制系统的硬件电路,控制程序和相应的电路图,以此培养自己的自学和动手能力,从而为今后参加工作或进一步深造打下良好的基础。
设计的步进电机控制系统有以下功能:1. 二相步进电机采用双极性(H桥)控制2.用K0-K1作为通电方式选择键,K0为四拍,K1为八拍3. 用K2作为启动/停止控制键4. 用K3作为方向控制5. 用4位LED数码管显示工作步数6. 用3个发光二极管显示状态:正转时红灯亮,反转时黄灯亮,不转时绿灯亮考虑到二相步进电机需采用双极性控制,故电机的驱动模块使用芯片L298实现,接线简洁,稳定性好。
选定好设计方案后,可以由分析得到系统的总体原理框图如下所示:图1系统总体原理框图2硬件电路设计模块2.1 单片机系统原理本次课题采用的单片机型号是ATmega128,ATmega128为基于AVR RISC结构的8位低功耗CMOS微处理器。
由于其先进的指令集以及单周期指令执行时,ATmega128 的数据吞吐率高达1 MIPS/MHz,从而可以缓减系统在功耗和处理速度之间的矛盾。
AVR 内核具有丰富的指令集和32个通用工作寄存器。
所有的寄存器都直接与算逻单元(ALU) 相连接,使得一条指令可以在一个时钟周期内同时访问两个独立的寄存器。
这种结构大大提高了代码效率,并且具有比普通的复杂指令集微处理器高10 倍的数据吞吐率。
ATmega128 具有如下特点:128K 字节的系统内可编程Flash( 具有在写的过程中还可以读的能力,即RWW)、4K字节的EEPROM,4K字节的SRAM、53个通用I/O 口线、32个通用工作寄存器、实时时钟RTC、4个灵活的具有比较模式和PWM 功能的定时器/ 计数器(T/C)、两个USART、面向字节的两线接口TWI、8通道10位ADC( 具有可选的可编程增益)、具有片内振荡器的可编程看门狗定时器、SPI串行端口、与IEEE 1149.1 规范兼容的JTAG测试接口( 此接口同时还可以用于片上调试),以及六种可以通过软件选择的省电模式。
ATmega128 AVR有整套的开发工具,包括C编译器,宏汇编,程序调试器/ 仿真器和评估板。
芯片引脚图如下所示:图2 ATmega128的引脚图本次课设所使用的单片机功能主要有单片机的I/O口以及定时器/计数器功能。
作为通用数字I/O 使用时,所有AVR I/O 端口都具有真正的读- 修改- 写功能。
这意味着用SBI 或CBI 指令改变某些管脚的方向( 或者是端口电平、禁止/ 使能上拉电阻) 时不会无意地改变其他管脚的方向( 或者是端口电平、禁止/ 使能上拉电阻)。
输出缓冲器具有对称的驱动能力,可以输出或吸收大电流,直接驱动LED。
所有的端口引脚都具有与电压无关的上拉电阻,并有保护二极管与VCC 和地相连。
每个端口都有三个I/O 存储器地址:数据寄存器–PORTx、数据方向寄存器–DDRx 和端口输入引脚–PINx。
数据寄存器和数据方向寄存器为读/ 写寄存器,而端口输入引脚为只读寄存器。
当寄存器SFIOR 的上拉禁止位PUD置位时所有端口的全部引脚的上拉电阻都被禁止。
DDxn 位于DDRx 寄存器,PORTxn 位于PORTx 寄存器, PINxn 位于PINx 寄存器。
DDxn 以来选择引脚的方向。
当DDxn 为"1“ 时, Pxn 配置为输出;否则为输入。
当引脚配置为输入时,若PORTxn 为"1“,上拉电阻将使能。
如果需要关闭这个上拉电阻,可以将PORTxn 清零,或者将这个引脚配置为输出。
复位时各引脚为三态,即使此时没有时钟在运行。
当引脚配置为输出时,若PORTxn 为"1“,引脚输出高电平("1“),否则输出低电平(“0“)。