数字图像处理教程(matlab版)
MATLAB之数字图像处理教程
矩阵的创建(续)
1、直接输入法-在命令窗口按规则输入方式创建矩阵
函数文件(续)
将上述程序存为文件sgn.m,便可以将其作为普 通的MATLAB函数来使用: >>x=4/3*pi; ↙ y=3*sgn(sin(x)) ↙ 显示结果为: y= -3
三、MATLAB的常用命令
MATLAB可以通过菜单对工作着的窗口进行 操作,也可以通过键盘在命令窗口输入命令进行 操作,下面给出几个常用的通用命令。 quit 关闭MATLAB exit 关闭MATLAB clc 清除MATLAB命令窗口中的所有显示内容 clear 清除工作空间中保存的所有变量 其他命令可以在学习应用中逐步熟悉。
(4)当前路径窗口(Current Directory)
当前路径窗口也称为当前目录窗口。可以显 示或改变当前目录。 当前目录指的是MATLAB运行文件时的工作 目录。只有在当前目录或搜索路径下的文件 及函数可以被运用或调用,如果没有特殊指 明,数据文件也将储存在当前目录下。 如果要建立自己的工作目录,在运行文件前 必须将该文件所在目录设置为当前目录。
(2)工作空间(Workspace)
工作空间用于保存MATLAB变量的信息。 在工作空间可以对变量进行观察、编辑、保 存和删除。 保存在工作空间中的自定义变量,直到使用 了“clear”命令清除工作空间或关闭了 MATLAB系统才被清除。 在命令窗口中键入“whos”命令,可以显示出 保存在工作空间中的所有变量的名称、大小、 数据类型等信息,如果键入“who”命令,则 只显示变量的名称。
函数文件(续)
实现符号函数
1, x 0, y sgn( x) 0, x 0, 1, x 0
MATLAB中的图像处理技术详解
MATLAB中的图像处理技术详解图像处理是一门涉及数字图像获取、处理、分析和展示的学科,其在各个领域都有重要的应用。
而MATLAB作为一种强大的科学计算软件,提供了丰富的图像处理工具包,可以帮助用户轻松地进行各种图像处理操作。
本文将详细介绍MATLAB中常用的图像处理技术,包括图像读取、图像显示、灰度转换、滤波操作、边缘检测以及图像分割等。
1. 图像读取和显示首先,在MATLAB中进行图像处理的第一步是读取图像。
MATLAB提供了imread函数,可以快速读取各类图像文件,例如JPEG、PNG、BMP等。
读取的图像可以是灰度图像,也可以是彩色图像。
读取之后,我们可以使用imshow函数将图像显示在MATLAB的图像窗口中,便于后续处理和分析。
2. 灰度转换在实际的图像处理应用中,有时候我们需要将彩色图像转换为灰度图像,以方便后续的处理和分析。
MATLAB提供了rgb2gray函数,可以将彩色图像转换为灰度图像。
转换后的灰度图像只包含一个通道,每个像素点的取值范围为0~255,表示灰度级。
3. 滤波操作滤波操作是在图像处理中常用的一种方法,其可以对图像进行平滑或者增强等处理。
MATLAB中提供了丰富的滤波函数,例如均值滤波、中值滤波、高斯滤波等。
这些滤波函数可以通过设置不同的参数来控制滤波效果,比如滤波窗口的大小、滤波核函数等。
4. 边缘检测边缘检测是图像处理中的一个重要任务,其可以帮助我们识别图像中的边缘信息,进而进行物体检测和分割。
MATLAB中提供了多种边缘检测算法,包括Sobel 算子、Canny算子等。
这些算法可以根据不同的应用场景选择合适的边缘检测方法,并根据需要调整相应的参数。
5. 图像分割图像分割是将图像分成若干个不同区域或者物体的过程,其在图像处理和计算机视觉中具有重要的意义。
MATLAB中提供了多种图像分割算法,例如基于阈值的分割、基于区域的分割以及基于边缘的分割等。
这些算法可以根据要求对图像进行有效的分割,以满足用户的实际需求。
(完整版)数字图像处理MATLAB程序【完整版】
第一部分数字图像处理实验一图像的点运算实验1.1 直方图一.实验目的1.熟悉matlab图像处理工具箱及直方图函数的使用;2.理解和掌握直方图原理和方法;二.实验设备1.PC机一台;2.软件matlab。
三.程序设计在matlab环境中,程序首先读取图像,然后调用直方图函数,设置相关参数,再输出处理后的图像。
I=imread('cameraman.tif');%读取图像subplot(1,2,1),imshow(I) %输出图像title('原始图像') %在原始图像中加标题subplot(1,2,2),imhist(I) %输出原图直方图title('原始图像直方图') %在原图直方图上加标题四.实验步骤1. 启动matlab双击桌面matlab图标启动matlab环境;2. 在matlab命令窗口中输入相应程序。
书写程序时,首先读取图像,一般调用matlab自带的图像,如:cameraman图像;再调用相应的直方图函数,设置参数;最后输出处理后的图像;3.浏览源程序并理解含义;4.运行,观察显示结果;5.结束运行,退出;五.实验结果观察图像matlab环境下的直方图分布。
(a)原始图像 (b)原始图像直方图六.实验报告要求1、给出实验原理过程及实现代码;2、输入一幅灰度图像,给出其灰度直方图结果,并进行灰度直方图分布原理分析。
实验1.2 灰度均衡一.实验目的1.熟悉matlab图像处理工具箱中灰度均衡函数的使用;2.理解和掌握灰度均衡原理和实现方法;二.实验设备1.PC机一台;2.软件matlab;三.程序设计在matlab环境中,程序首先读取图像,然后调用灰度均衡函数,设置相关参数,再输出处理后的图像。
I=imread('cameraman.tif');%读取图像subplot(2,2,1),imshow(I) %输出图像title('原始图像') %在原始图像中加标题subplot(2,2,3),imhist(I) %输出原图直方图title('原始图像直方图') %在原图直方图上加标题a=histeq(I,256); %直方图均衡化,灰度级为256subplot(2,2,2),imshow(a) %输出均衡化后图像title('均衡化后图像') %在均衡化后图像中加标题subplot(2,2,4),imhist(a) %输出均衡化后直方图title('均衡化后图像直方图') %在均衡化后直方图上加标题四.实验步骤1. 启动matlab双击桌面matlab图标启动matlab环境;2. 在matlab命令窗口中输入相应程序。
MATLAB图形图像处理2课件

• imfilter是用来实现线性空间滤波的函数,其基本语法格式 为:
• hp = imfilter(p, w, filter_mode, boundary_options, size_options)
• 其中hp为经过滤波后输出的图像,p为原图像,参数w为滤 波模板,filter_mode指定滤波过程中使用相关核(corr)还 是卷积核(conv)。boundary_options控制边界填充方式为 边界复制(replicate)、边界循环(circular)还是边界对 称(symmetric)。size_options可以为same或者full两者之 一。如 hp = imfilter(p, w, ’replicate’)
• subplot(1,3,3);imshow(p2);
• 图3.33 拉普拉斯波和高斯-拉普拉斯滤波((a)原 图像;(b)拉普拉斯滤波后图像;(c)高斯-拉普拉 斯滤波后图像)
3.7 图像的空间变换
• 图像的空间变换也称为图像的几何变 换,是指将用户获得或设计的原始图像, 按照需要产生大小、形状和位置的变化。 图像几何变换是图像显示技术中的一个重 要组成部分,常用的图像几何变换主要包 括图像的缩放、图像的剪切及图像的旋转 等内容。
• p = imread('football.jpg');
• I = rgb2gray(p);
• imhist(I);
3.5.3直方图均衡化
• 通过直方图均衡化做适当的调整,即把一幅已知灰 度概率分布图像中的像素灰度做某种映射变换,使 它变成一幅具有均匀概率分布的新图像,使图像视 觉效果更加清晰。
• imnoise是MATLAB提供的图像噪声模拟函数,其 基本语法格式为:
实验一 MATLAB数字图像处理初步
实验一MATLAB数字图像处理初步一、实验目的1、熟悉及掌握在MATLAB中能够处理哪些格式图像。
2、熟练掌握在MATLAB中读取图像,并获取图像的大小、颜色、高度、宽度等等相关信息。
3、掌握在MATLAB中按照指定要求存储一幅图像的方法。
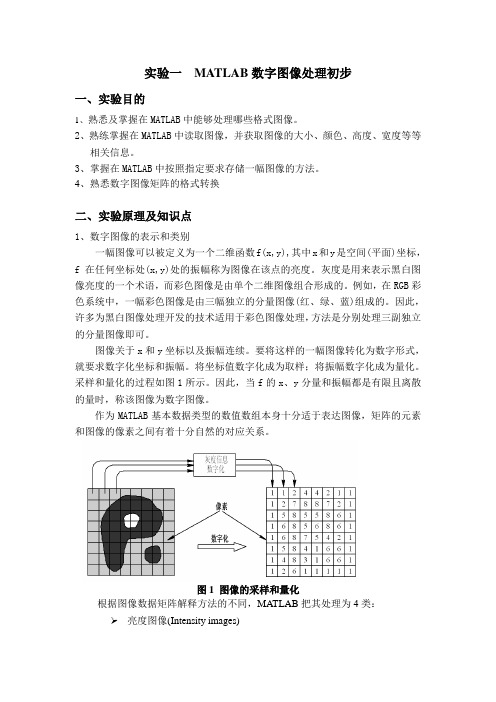
4、熟悉数字图像矩阵的格式转换二、实验原理及知识点1、数字图像的表示和类别一幅图像可以被定义为一个二维函数f(x,y),其中x和y是空间(平面)坐标,f 在任何坐标处(x,y)处的振幅称为图像在该点的亮度。
灰度是用来表示黑白图像亮度的一个术语,而彩色图像是由单个二维图像组合形成的。
例如,在RGB彩色系统中,一幅彩色图像是由三幅独立的分量图像(红、绿、蓝)组成的。
因此,许多为黑白图像处理开发的技术适用于彩色图像处理,方法是分别处理三副独立的分量图像即可。
图像关于x和y坐标以及振幅连续。
要将这样的一幅图像转化为数字形式,就要求数字化坐标和振幅。
将坐标值数字化成为取样;将振幅数字化成为量化。
采样和量化的过程如图1所示。
因此,当f的x、y分量和振幅都是有限且离散的量时,称该图像为数字图像。
作为MATLAB基本数据类型的数值数组本身十分适于表达图像,矩阵的元素和图像的像素之间有着十分自然的对应关系。
图1 图像的采样和量化根据图像数据矩阵解释方法的不同,MATLAB把其处理为4类: 亮度图像(Intensity images)二值图像(Binary images)索引图像(Indexed images)RGB图像(RGB images)(1) 亮度图像一幅亮度图像是一个数据矩阵,其归一化的取值表示亮度。
若亮度图像的像素都是uint8类或uint16类,则它们的整数值范围分别是[0,255]和[0,65536]。
若图像是double类,则像素取值就是浮点数。
规定双精度型归一化亮度图像的取值范围是[0,1](2) 二值图像一幅二值图像是一个取值只有0和1的逻辑数组。
而一幅取值只包含0和1的uint8类数组,在MATLAB中并不认为是二值图像。
《数字图像处理及MATLAB实现》图像增强与平滑实验
《数字图像处理及MATLAB实现》图像增强与平滑实验一.实验目的及要求1、熟悉并掌握MA TLAB 图像处理工具箱的使用;2、理解并掌握常用的图像的增强技术。
二、实验设备MATLAB 6.5 以上版本、WIN XP 或WIN2000 计算机三、实验内容(一)研究以下程序,分析程序功能;输入执行各命令行,认真观察命令执行的结果。
熟悉程序中所使用函数的调用方法,改变有关参数,观察试验结果。
(可将每段程序保存为一个.m文件)1.直方图均衡化clear all; close all % Clear the MATLAB workspace of any variables% and close open figure windows.I = imread('pout.tif'); % Reads the sample images ‘pout.tif’, and stores it inimshow(I) % an array named I.display the imagetext(60,20,'李荣桉1909290239','horiz','center','color','r')figure, imhist(I) % Create a histogram of the image and display it in% a new figure window.[I2,T] = histeq(I); % Histogram equalization.figure, imshow(I2) % Display the new equalized image, I2, in a new figure window.text(60,20,'李荣桉1909290239','horiz','center','color','r')figure, imhist(I2) % Create a histogram of the equalized image I2.figure,plot((0:255)/255,T); % plot the transformation curve.imwrite (I2, 'pout2.png'); % Write the newly adjusted image I2 to a disk file named% ‘pout2.png’.imfinfo('pout2.png') % Check the contents of the newly written file2.直接灰度变换clear all; close allI = imread('cameraman.tif'); 注意:imadjust()功能:调整图像灰度值或颜色映像表,也可实现伽马校正。
matlab图像处理教程1
基本概念一点通从理论上讲,图像是一种二维的连续函数,然而在计算机上对图像进行数字处理的时候,首先必须对其在空间和亮度上进行数字化,这就是图像的采样和量化的过程。
空间坐标(x,y)的数字化称为图像采样,而幅值数字化称为灰度级量化。
对一幅图像采样时,若每行(横向)采样数为M,每列(纵向)采样数为N,则图像大小为M*N个像素,f(x,y)表示点(x,y) 处的灰度值,则F(x,y)构成一个M*N 实数矩阵****************************经验分享:“像素”的英文为“pixel”,它是“picture”和“element”的合成词,表示图像元素的意思。
我们可以对“像素”进行如下理解:像素是一个面积概念,是构成数字图像的最小单位。
****************************把采样后所得的各像素灰度值从模拟量到离散量的转换称为图像灰度的量化。
量化是对图像幅度坐标的离散化,它决定了图像的幅度分辨率。
量化的方法包括:分层量化、均匀量化和非均匀量化。
分层量化是把每一个离散样本的连续灰度值只分成有限多的层次;均匀量化是把原图像灰度层次从最暗至最亮均匀分为有限个层次,如果采用不均匀分层就称为非均匀量化。
当图像的采样点数一定时,采用不同量化级数的图像质量不一样。
量化级数越多,图像质量越好;量化级数越少,图像质量越差。
量化级数小的极端情况就是二值图像。
****************************经验分享:“灰度”可以认为是图像色彩亮度的深浅。
图像所能够展现的灰度级越多,也就意味着图像可以表现更强的色彩层次。
如果把黑——灰——白连续变化的灰度值量化为256个灰度级,灰度值的范围为0~255,表示亮度从深到浅,对应图像中的颜色为从黑到白。
****************************因此,对数字图像进行处理,也就是对特定的矩阵进行处理。
在C语言中,对M×N数字图像处理的核心代码如下:for (j=1;j<N+1;j++)for(i=1;i<M+1;i++){对I(i,j)的具体运算};在Matlab中,对M×N数字图像处理的核心代码如下:for i=1:Nfor j=1:M对I(i,j)的具体运算endend一幅数字图像可以用一个矩阵来表示,对数字图像进行处理,实质上就是对特定的图像矩阵进行变换的过程,因此,图像变换是数字图像处理技术的基础。
数字图像处理ch01(MATLAB)-课件
2024/10/12
第一章 绪论
17
2024/10/12
第一章 绪论
18
2024/10/12
第一章 绪论
19
2024/10/12
第一章 绪论
20
<2>几何处理
放大、缩小、旋转,配准,几何校正,面积、周长计算。
请计算台湾的陆地面积
2024/10/12
第一章 绪论
21
<3>图象复原
由图象的退化模型,求出原始图象
图像处理是指按照一定的目标,用一系列的操 作来“改造”图像的方法.
2024/10/12
第一章 绪论
7
➢图象处理技术的分类(从方法上进行分类)[2]
1.模拟图象处理(光学图像处理等)
用光学、电子等方法对模拟信号组成的图像,用光学器 件、电子器件进行光学变换等处理得到所需结果(哈哈 镜、望远镜,放大镜,电视等).
2024/10/12
第一章 绪论
22
<4>图象重建[3]
[3]此图像来自罗立民,脑成像,
2024/10/12
第一章 绪论
23
/zhlshb/ct/lx.htm
2024/10/12
第一章 绪论
图形用户界面,动画,网页制作等
2024/10/12象处理的基本概念,和基 本问题,以及一些典型的应用。
2024/10/12
第一章 绪论
33
提问
摄像头(机),扫描仪,CT成像装置,其他图象成像装置
2)图象的存储
各种图象存储压缩格式(JPEG,MPEG等),海量图象数据库技术
3)图象的传输
内部传输(DirectMemoryAccess),外部传输(主要是网络)
数字图像处理matlab代码
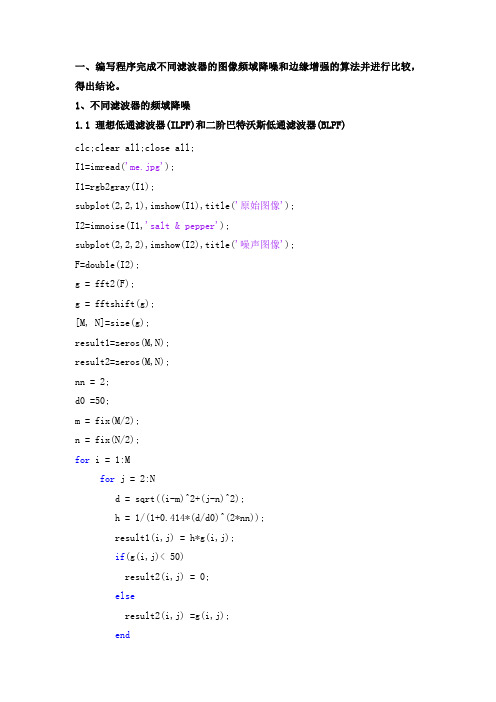
一、编写程序完成不同滤波器的图像频域降噪和边缘增强的算法并进行比较,得出结论。
1、不同滤波器的频域降噪1.1 理想低通滤波器(ILPF)和二阶巴特沃斯低通滤波器(BLPF)clc;clear all;close all;I1=imread('me.jpg');I1=rgb2gray(I1);subplot(2,2,1),imshow(I1),title('原始图像');I2=imnoise(I1,'salt & pepper');subplot(2,2,2),imshow(I2),title('噪声图像');F=double(I2);g = fft2(F);g = fftshift(g);[M, N]=size(g);result1=zeros(M,N);result2=zeros(M,N);nn = 2;d0 =50;m = fix(M/2);n = fix(N/2);for i = 1:Mfor j = 2:Nd = sqrt((i-m)^2+(j-n)^2);h = 1/(1+0.414*(d/d0)^(2*nn));result1(i,j) = h*g(i,j);if(g(i,j)< 50)result2(i,j) = 0;elseresult2(i,j) =g(i,j);endendendresult1 = ifftshift(result1);result2 = ifftshift(result2);J2 = ifft2(result1);J3 = uint8(real(J2));subplot(2, 2, 3),imshow(J3,[]),title('巴特沃斯低通滤波结果'); J4 = ifft2(result2);J5 = uint8(real(J4));subplot(2, 2, 4),imshow(J5,[]),title('理想低通滤波结果');实验结果:原始图像噪声图像巴特沃斯低通滤波结果理想低通滤波结果1.2 指数型低通滤波器(ELPF)clc;clear all;close all;I1=imread('me.jpg');I1=rgb2gray(I1);I2=im2double(I1);I3=imnoise(I2,'gaussian',0.01);I4=imnoise(I3,'salt & pepper',0.01);subplot(1,3,1),imshow(I2), title('原始图像'); %显示原始图像subplot(1,3,2),imshow(I4),title('加入混合躁声后图像 ');s=fftshift(fft2(I4));%将灰度图像的二维不连续Fourier 变换的零频率成分移到频谱的中心[M,N]=size(s); %分别返回s的行数到M中,列数到N中n1=floor(M/2); %对M/2进行取整n2=floor(N/2); %对N/2进行取整d0=40;for i=1:Mfor j=1:Nd=sqrt((i-n1)^2+(j-n2)^2); %点(i,j)到傅立叶变换中心的距离 h=exp(log(1/sqrt(2))*(d/d0)^2);s(i,j)=h*s(i,j); %ILPF滤波后的频域表示endends=ifftshift(s); %对s进行反FFT移动s=im2uint8(real(ifft2(s)));subplot(1,3,3),imshow(s),title('ELPF滤波后的图像(d=40)');运行结果:1.3 梯形低通滤波器(TLPF)clc;clear all;close all;I1=imread('me.jpg');I1=rgb2gray(I1); %读取图像I2=im2double(I1);I3=imnoise(I2,'gaussian',0.01);I4=imnoise(I3,'salt & pepper',0.01);subplot(1,3,1),imshow(I2),title('原始图像'); %显示原始图像subplot(1,3,2),imshow(I4),title('加噪后的图像');s=fftshift(fft2(I4));%将灰度图像的二维不连续Fourier 变换的零频率成分移到频谱的中心[M,N]=size(s); %分别返回s的行数到M中,列数到N中n1=floor(M/2); %对M/2进行取整n2=floor(N/2); %对N/2进行取整d0=10;d1=160;for i=1:Mfor j=1:Nd=sqrt((i-n1)^2+(j-n2)^2); %点(i,j)到傅立叶变换中心的距离 if (d<=d0)h=1;else if (d0<=d1)h=(d-d1)/(d0-d1);else h=0;endends(i,j)=h*s(i,j); %ILPF滤波后的频域表示endends=ifftshift(s); %对s进行反FFT移动s=im2uint8(real(ifft2(s))); %对s进行二维反离散的Fourier变换后,取复数的实部转化为无符号8位整数subplot(1,3,3),imshow(s),title('TLPF滤波后的图像');运行结果:1.4 高斯低通滤波器(GLPF)clear all;clc;close all;I1=imread('me.jpg');I1=rgb2gray(I1);I2=im2double(I1);I3=imnoise(I2,'gaussian',0.01);I4=imnoise(I3,'salt & pepper',0.01);subplot(1,3,1),imshow(I2),title('原始图像');subplot(1,3,2),imshow(I4),title('加噪后的图像');s=fftshift(fft2(I4));%将灰度图像的二维不连续Fourier 变换的零频率成分移到频谱的中心[M,N]=size(s); %分别返回s的行数到M中,列数到N中n1=floor(M/2); %对M/2进行取整n2=floor(N/2); %对N/2进行取整d0=40;for i=1:Mfor j=1:Nd=sqrt((i-n1)^2+(j-n2)^2); %点(i,j)到傅立叶变换中心的距离 h=1*exp(-1/2*(d^2/d0^2)); %GLPF滤波函数s(i,j)=h*s(i,j); %ILPF滤波后的频域表示endends=ifftshift(s); %对s进行反FFT移动s=im2uint8(real(ifft2(s))); %对s进行二维反离散的Fourier变换后,取复数的实部转化为无符号8位整数subplot(1,3,3),imshow(s),title('GLPF滤波后的图像(d=40)');运行结果:1.5 维纳滤波器clc;clear all;close all;I=imread('me.jpg'); %读取图像I=rgb2gray(I);I1=im2double(I);I2=imnoise(I1,'gaussian',0.01);I3=imnoise(I2,'salt & pepper',0.01);I4=wiener2(I3);subplot(1,3,1),imshow(I1),title('原始图像'); %显示原始图像subplot(1,3,2),imshow(I3),title('加入混合躁声后图像');I4=wiener2(I3);subplot(1,3,3),imshow(I4),title('wiener滤波后的图像');运行结果:结论:理想低通滤波器,虽然有陡峭的截止频率,却不能产生良好的效果,图像由于高频分量的滤除而变得模糊,同时还产生振铃效应。
数字图像处理实验(MATLAB版)
数字图像处理实验(MATLAB版)数字图像处理(MATLAB版)实验指导书(试用版)湖北师范学院教育信息与技术学院2009年4月试行目录实验一、数字图像获取和格式转换 2 实验二、图像亮度变换和空间滤波 6 实验三、频域处理7 实验四、图像复原9 实验五、彩色图像处理101实验六、图像压缩11 实验七、图像分割13 教材与参考文献142《数字图像处理》实验指导书实验一、数字图像获取和格式转换一、实验目的1掌握使用扫描仪、数码相机、数码摄像级机、电脑摄像头等数字化设备以及计算机获取数字图像的方法;2修改图像的存储格式;并比较不同压缩格式图像的数据量的大小。
二、实验原理数字图像获取设备的主要性能指标有x、y方向的分辨率、色彩分辨率(色彩位数)、扫描幅面和接口方式等。
各类设备都标明了它的光学分辨率和最大分辨率。
分辨率的单位是dpi,dpi是英文Dot Per Inch的缩写,意思是每英寸的像素点数。
扫描仪扫描图像的步骤是:首先将欲扫描的原稿正面朝下铺在扫描仪的玻璃板上,原稿可以是文字稿件或者图纸照片;然后启3动扫描仪驱动程序后,安装在扫描仪内部的可移动光源开始扫描原稿。
为了均匀照亮稿件,扫描仪光源为长条形,并沿y方向扫过整个原稿;照射到原稿上的光线经反射后穿过一个很窄的缝隙,形成沿x方向的光带,又经过一组反光镜,由光学透镜聚焦并进入分光镜,经过棱镜和红绿蓝三色滤色镜得到的RGB三条彩色光带分别照到各自的CCD 上,CCD将RGB光带转变为模拟电子信号,此信号又被A/D变换器转变为数字电子信号。
至此,反映原稿图像的光信号转变为计算机能够接受的二进制数字电子信号,最后通过串行或者并行等接口送至计算机。
扫描仪每扫一行就得到原稿x方向一行的图像信息,随着沿y方向的移动,在计算机内部逐步形成原稿的全图。
扫描仪工作原理见图1.1。
4图1.1扫描仪的工作原理在扫描仪的工作过程中,有两个元件起到了关键的作用。
一个是CCD,它将光信号转换成为电信号;另一个是A/D变换器,它将模拟电信号变为数字电信号。
MATLABImageProcessing图像处理入门教程
MATLABImageProcessing图像处理入门教程MATLAB图像处理入门教程第一章:图像处理基础知识图像处理是指对于数字图像进行各种操作和处理的过程。
在本章中,我们将介绍一些基础的图像处理知识。
1.1 数字图像表示数字图像是由像素组成的二维数组,每个像素表示图像中的一个点。
每个像素的值表示该点的亮度或颜色。
1.2 MATLAB中的图像表示在MATLAB中,图像可以用二维矩阵表示,其中每个元素对应一个像素的亮度或颜色值。
常见的图像格式包括灰度图像和彩色图像。
1.3 图像读取和显示使用MATLAB的imread函数可以读取图像文件,imshow函数可以显示图像。
第二章:图像预处理在进行实际的图像处理之前,通常需要对图像进行预处理,以提取感兴趣的信息或减少噪声。
2.1 图像平滑平滑操作可以减少图像中的噪声。
常见的平滑方法包括均值滤波和高斯滤波。
2.2 边缘检测边缘检测可以找到图像中的边缘区域。
常用的边缘检测算法包括Sobel算子和Canny算子。
2.3 图像分割图像分割可以将图像划分为不同的区域,以便后续的处理。
常见的图像分割算法包括阈值分割和区域生长算法。
第三章:图像增强图像增强可以提高图像的质量和清晰度,使图像更易于理解和分析。
3.1 直方图均衡化直方图均衡化可以增强图像的对比度,使图像的灰度值分布更均匀。
3.2 锐化锐化操作可以增强图像的边缘和细节。
常见的锐化算法包括拉普拉斯算子和Sobel算子。
3.3 噪声去除噪声去除可以降低图像中的噪声,使图像更清晰。
常见的噪声去除方法包括中值滤波和小波去噪。
第四章:图像分析图像分析可以从图像中提取出感兴趣的特征或对象。
4.1 特征提取特征提取可以从图像中提取出具有代表性的特征,可以用于图像分类和识别。
4.2 图像匹配图像匹配可以找到图像中相似的区域或对象。
常见的图像匹配方法包括模板匹配和特征点匹配。
4.3 图像识别图像识别可以根据图像的特征和模式来判断图像中的对象或场景。
数字图像处理(MATLAB版)(第2版)

目录分析
1.1数字图像处理的 发展
1.2数字图像的相关 概念
1.3数字图像处理的 内容
1.4数字图像处理的 方法
1
1.5图像数字 化技术
2
1.6图像的统 计特征
3
1.7数字图像 的应用
4
1.8 MATLAB 领略
5 1.9 MATLAB
图像处理应用 实例
小结
习题
1
2.1图像类型 的转换
2
2.2线性系统
数字图像处理(MATLAB版)(第2版)
读书笔记模板
01 思维导图
03 目录分析 05 读书笔记
目录
02 内容摘要 04 作者介绍 06 精彩摘录
思维导图
本书关键字分析思维导图
几何变换
技术
图像
基础
图像
特征
数字图像处理
版
数字图像
内容 小结
数字图像
第版
习题
边界
第章
图像增强
滤波
运算
内容摘要
本书主要内容包括:全书共10章,分别介绍了数字图像的相关论述、数字图像的处理基础、图像编码、图像 复原、图像几何变换、图像频域变换、图像几何变换、小波变换、图像增强、图像分割与边缘检测及图像特征描 述等内容。
10.8形态学重建 10.9特征度量
小结 10.10查表操作
习题
作者介绍
这是《数字图像处理(MATLAB版)(第2版)》的读书笔记模板,暂无该书作者的介绍。
读书笔记
这是《数字图像处理(MATLAB版)(第2版)》的读书笔记模板,可以替换为自己的心得。
精彩摘录
这是《数字图像处理(MATLAB版)(第2版)》的读书笔记模板,可以替换为自己的精彩内容摘录。
数字图像处理及应用(MATLAB)第3章
程序运行结果如图(c)所示。
4.灰度非线性变换 当用某些非线性函数,例如平方、对数、指数函数等作为 映射函数时,可实现图像灰度的非线性变换。灰度的非线性 变换简称非线性变换,是指由这样一个非线性单值函数所确 定的灰度变换。 (1)对数变换 对数变换常用来扩展低值灰度,压缩高值灰度,这样可以使低值灰 度的图像细节更容易看清,从而达到增强的效果。对数非线性变换
[例] 假设一个图像由一个4×4大小的二维数值矩阵构成,如图(a)
所示,试写出图像的灰度分布,并画出图像的直方图。
灰度直方图计算示意图
经过统计图像中灰度值为0的像素有1个,灰度值为1的 像素有1个,…,灰度值为6的像素有1个。由此得到图像的 灰度分布如表所示,由表可得灰度直方图如图(b)所示。 图像的灰度分布
3.1.2 (rk)代表概 率密度函数,并且有下式成立:
nk Pr (rk ) 0 rk 1 n k 0,1,2,l 1
式中nk为图像中出现rk这种灰度的像素数,n是图像中像素 总数,nk/n就是概率论中的频数,l是灰度级的总数目。在直 角坐标系中作出rk与P(rk)的关系图形,就得到直方图
图 不同的图像其直方图却是相同的
图 直方图的叠加性质
由以上可知,尽管直方图不能表示出某灰度级的像素在什么位
置,更不能直接反映出图像内容,但是却能描述该图像的灰度分布
特性,使人们从中得到诸如图像的明亮程度、对比度等,成为一些 处理方法的重要依据。通常一幅均匀量化的自然图像由于其灰度直
方图分布集中在较窄的低值灰度区间,引起图像的细节看不清楚,
(a)反变换关系
(b) 原图 图像反转的效果
(c)变换后的图像
由直线方程截斜式可知当k =-1,b=L-1时,其表达式为:
MATLAB数字图像处理实验--图像基本运算
MATLAB数字图像处理实验--图像基本运算一、实验目的1.理解图像点运算、代数运算、几何运算的基本定义和常见方法;2.掌握在MTLAB中对图像进行点运算、代数运算、几何运算的方法;3.掌握在MATLAB中进行插值的方法4.运用MATLAB语言进行图像的插值缩放和插值旋转5.进一步熟悉了解MATLAB语言的应用。
二、实验设备与软件1.PC计算机系统2.MATLAB软件,包括图像处理工具箱(Image Processing Toolbox)3.实验图片三、实验内容及结果分析3.1图像的点运算选择pout.tif作为实验图像,实验原理及内容参照《MATLAB图像处理编程及应用》程序代码:I=imread('pout.tif');figure;subplot(1,3,1);imshow(I);title('原图');J=imadjust(I,[0.3;0.6],[0.1;0.9]);subplot(1,3,2);imshow(J);title('线性扩展');I1=double(I);I2=I1/255;C=2;K=C*log(1+I2);subplot(1,3,3);imshow(K);title('非线性扩展');M=255-I;figure;subplot(1,3,1);imshow(M);title('灰度倒置');N1=im2bw(I,0.4);N2=im2bw(I,0.7);subplot(1,3,2);imshow(N1);title('二值化阈值0.4');subplot(1,3,3);imshow(N2);title('二值化阈值0.7');执行结果:原图线性扩展非线性扩展灰度倒置二值化阈值0.4二值化阈值0.7实验1结果图3.2图像的代数运算选择两幅图像,一幅是原图像,一幅为背景图像,采用正确的图像代数运算方法,分别实现图像叠加、混合图像的分离和图像的局部显示效果。
数字图像处理MATLAB图像处理PPT课件
主要应用举例: ➢ 差影法(检测同一场景两幅图像之间的变化) ➢ 混合图像的分离
第17页/共41页
(1)检测同一场景两幅图像之间的变化
设:时刻1的图像为 T1(x,y), 时刻2的图像为 T2(x,y) g(x,y) = T2 (x,y) - T1(x,y)
第25页/共41页
除法运算(Division)
4、除法运算
C(x, y) A(x, y) B(x, y)
简单的除法运算可用于改变图像的灰度级, 常用于遥感图像处理中。
在四种算术运算中,减法与加法在图像增强 处理中最为有用。
第26页/共41页
几何变换
1)简单变换 • 问题描述:图像的平移、放缩和旋转。 • 解题思路:从易到难。工具:线性代数中的齐次坐标。
x
象
素
y1
填y
充
映
射
f(x1,y1) (x1,y1)非整型
f(x,y) (x,y)整型
第32页/共41页
图像的缩放
• 两种映射方法的对比 • 对于向前映射:每个输出图像的灰度要经过多次运算; • 对于向后映射:每个输出图像的灰度只要经过一次运算。
实际应用中,更经常采用向后映射法。 其中,根据四个相邻像素灰度值计算某位置的像素灰度
1、加法运算
C(x, y) A(x, y) B(x, y)
主要应用举例: ➢ 去除“叠加性”随机噪音 ➢ 生成图像叠加效果
第12页/共41页
(1)去除“叠加性”噪音
对于原图象f(x,y),有一个噪音图像集 { g i (x ,y) } 其中:g i (x ,y) = f(x,y) + ei(x,y)
MATLAB数字图像处理基本操作及空域滤波
实验一 MATLAB数字图像处理基本操作及空域滤波实验目的1、了解有关数字图像处理的基本概念,熟悉Matlab软件中关于数字图像处理的基本命令,掌握利用Matlab软件进行数字图像处理的简单方法。
2、了解并掌握直方图统计方法以及分段线性拉伸、直方图均衡等亮度调整算法,通过观察对这些运算建立感性认识。
3、掌握空域滤波中常用的平滑和锐化滤波器。
实验内容1. 观察各类图像的直方图;操作LUT灰度对照表,进行分段线性拉伸;采用直方图均衡方法对低对比度的图像进行对比度增强。
2.掌握图像模板卷积运算的实质,认识各种模板的处理效果;3. 掌握邻域平均及中值滤波降噪方法的特点,认识其功能及适用场合;4. 掌握拉普拉斯算子、Sobel算子、Prewitt算子和Isotropic算子的特点,认识其功能及适用场合。
实验原理1、数字图像以一定的格式存放在计算机的存储器中(如磁盘),常见的格式有BMP,TIF,PCX等等,要进行数字图像处理,第一项工作就是把图像读到计算机的内存中,以便进行进一步的处理。
在Matlab中,函数imread()完成此项工作。
下面一小段Matlab语句即可实现将图像“rice.tif”显示在一个图像窗口的左边,将其轮廓图显示在该窗口的右边。
I=imread('rice.tif');subplot(1,2,1);imshow(I)subplot(1,2,2);imcontour(I);这里,imread(‘rice.tif’)将磁盘上的图像文件rice.tif读入内存变量I中,subplot(1,2,1)生成一个可以横向放置2幅图像的窗口,并设置下一显示位置在左边,imshow(I)显示图像I,subplot(1,2,2)准备下一图像的显示位置,imcontour(I)生成图像I 的轮廓并显示在窗口的右边。
数字图像一般可分为二值图、灰度图和真彩图等几类。
bw=imread('text.tif');bw2=imcomplement(bw);subplot(1,2,1),imshow(bw)subplot(1,2,2),imshow(bw2)这里函数imcomplement(bw)完成对二值图像text.tif(bw)的求补运算。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
/3、图像的几何变换
二、图像镜像
B=imtransform(A,TFORM,method); TFORM=makeform(transformtype,Matrix);%空间变换结 构
Method合法值 ‘bicubic’ ‘bilinear’ ‘nearest’
含义 双三次插值 双线性插值 最近邻插值
‘log’ ‘prewitt’ ‘sobel’
功能 平均模板 圆形领域的平均模板 高斯模板 拉普拉斯模板 高斯-拉普拉斯模板 Prewitt水平边缘检测算子 Sobel水平边缘检测算子
/4、空间域图像增强 四、中值滤波
中值滤波本质上是一种统计排序滤波器。中值不同于均值,是指排序 队列中位于中间位置的元素的值。中值滤波并非线性滤波器。对于某 些类型的随机噪声具有非常理想的降噪能力。典型的应用就是消除椒 盐噪声。
添 加 高 斯 白 噪 声
添 加 椒 盐 噪 声
/4、空间域图像增强 二、空间域滤波
滤波过程就是在图像f(x,y)中逐点移动模板,使模板中心和点(x,y)重合,滤波器 在每一点(x,y)的响应是根据模板的具体内容并通过预先定义的关系来计算的。
W(-1,-1) W(-1,0) W(-1,1)
W(0,-1) W(0,0) W(0,1)
数字图像处理
浙江大学
/1、图像的读取和显示 /2、图像的点运算 /3、图像的几何变换 /4、空间域图像增强 /5、频率域图像增强 /6、彩色图像处理 /7、形态学图像处理 /8、图像分割 /9、特征提取
/1、图像的读取和显示
一、图像的读取
A=imread(FILENAME,FM T)
FILENAME 指定图像文件的完整路径和文件名。如果在work工作目录下 只需提供文件名。FMT为图像文件的格式对应的标准扩展名。 I_1=imread('D:\10.06.08nir\TTC10377.BMP');%读入图像 二、图像的写入
c为尺度比例常数,s为源灰度值,t为变换后的目标灰 度值。k为常数。灰度的对数变换可以增强一幅图像 中较暗部分的细节,可用来扩展被压缩的高值图像中 的较暗像素。广泛应用于频谱图像的显示中。
Warning:log函数会对输入图像矩阵s中的每个元素进行
操作,但仅能处理double类型的矩阵。而从图像文件中得到的 图像矩阵大多是uint8类型的,故需先进行im2double数据类型 转换。
图像直方图归一化
imhist(I);%灰度直方图
I=imread(‘red.bmp’);%读入图像 figure;%打开新窗口 [M,N]=size(I);%计算图像大小 [counts,x]=imhist(I,32);%计算有32个小区间的灰度直方图 counts=counts/M/N;%计算归一化灰度直方图各区间的值 stem(x,counts);%绘制归一化直方图
逆 时 针 度
30
/4、空间域图像增强 一、噪声添加
h=imnoise(I,type,parameters);
type为噪声类型,合法值如下:
‘gaussian’
高斯白噪声:幅度为高斯分布,功率谱均匀分 布
‘salt&pepper’
黑点如胡椒,白点如盐粒。由图像传感器、传 输信道、解码处理、图像切割等产生的黑白相 间的亮暗点噪声。
thresh=graythresh(I);%自动设定所需的最优化阈值
OTSU算法:最大类间方差法自动单阈值分割。
Kapur算法:一维直方图熵阈值算法
niblack算法:局部阈值分割 阈值的计算公式是T = m + k*v,其中m为以该像素点为中心的区域的平 均灰度值,v是该区域的标准差,k是一个系数。
原 图 像 及 直 方 图
图像变暗后灰度均衡化 图像变亮后灰度均衡化
/3、图像的几何变换
一、图像平移
正变换
1 0 0
[ x1 y1 1] [ x0 y0 1] 0 1 0
Tx
Ty
1
逆变换
1
0 0
[x0 y0 1] [x1 y1 1] 0
1 0
Tx
Ty
1
strel %用来创建形态学结构元素 translate(SE,[y x])%原结构元素SE上y和x方向平移 imdilate%形态学膨胀
/2、图像的点运算
三、灰度的Gamma变换
y x esp
其中,x、y的取值范围为[0,1]。esp为补偿系数,r则为Gamma系数。 Gamma变换是根据r的不同取值选择性的增强低灰度区域的对比度 或者高灰度区域的对比度。
J=imadjust(I,[low_in high_in],[low_out high_out],gamma)
figure;%创建一个新的窗口
figure;subplot(m,n,p);imshow(I);
Subplot(m,n,p)含义为:打开一个有m行n列图像位置的窗口, 并将焦点位于第p个位置上。
/1、图像的读取和显示 四、图像的格式转换
im2bw(I,LEVEL);
阈值法从灰度图、RGB图创建二值图。LEVEL为指定的阈值;(0,1)。
h=medfilt2(I1,[m,n]);
m和n为中值滤波处理的模板大小,默认3*3
/4、空间域图像增强
五、图像锐化
图像锐化主要用于增强图像的灰度跳变部分,主要通过运算导数(梯度) 或有限差分来实现。主要方法有:Robert交叉梯度,Sobel梯度,拉普拉 斯算子,高提升滤波,高斯-拉普拉斯变换。
原图像
水平镜像图像
垂直镜像图像
/3、图像的几何变换
三、图像转置
A=imread('nir.bmp'); tform=maketform('affine',[0 1 0;1 0 0;0 0 1]); B=imtransform(A,tform,'nearest'); figure;imshow(A); figure;imshow(B);imwrite(B,'nir转置后图像.bmp');
W(1,-1) W(1,0) W(1, 1)
f(x-1,y-1) f(x-1,y) f(x1,y+1)
f(x,y-1) f(x,y) f(x,y+1)
f(x+1,y- f(x+1,y) f(x+1,y+
1)
1)
B=imfilter(f,w,option1,option2,…);
f 为要进行滤波操作的图像。 w为滤波操作使用的模板,为一个二维数组,可自己定义。 option1……是可选项,包括: 1、边界选项(’symmetric’、’replicate’、’circular’) 2、尺寸选项(’same’、’full’) 3、模式选项(’corr’、’conv’)
参数transformtype指定了变换的类型,常见的’affine’为二维或 多维仿射变换,包括平移、旋转、比例、拉伸和错切等。
Matrix为相应的仿射变换矩阵。
A=imread('nir.bmp'); [height,width,dim]=size(A); tform=maketform('affine',[-1 0 0;0 1 0;width 0 1]); B=imtransform(A,tform,'nearest'); tform2=maketform('affine',[1 0 0;0 -1 0;0 height 1]); C=imtransform(A,tform2,'nearest'); figure;imshow(A); figure;imshow(B);imwrite(B,'nir水平镜像.bmp'); figure;imshow(C);imwrite(B,'nir垂直镜像.bmp');
I=imread('nir.bmp'); figure;imshow(imadjust(I,[],[],0.75)); %gamma=0.5 title('Gamma 0.5');
原
图 像
NIR
Gamma 0.5
Gamma 1.5
四、灰度阈值变换及二值化
f
x
0 255
x x
T T
T为指定阈值
BW=im2bw(I,level);%level为人工设定阈值范围为[0 ,1]
原 图 像
滤 波 后 图
像
/4、空间域图像增强 三、滤波器设计
h=fspecial(type,parameters)
parameters为可选项,是和所选定的滤波器类型type相关的 配置参数,如尺寸和标准差等。
type为滤波器的类型。其合法值如下:
合法取值 ‘average’
‘disk’ ‘gaussian’ ‘laplacian’
DA
DMax A0
DA
Hi
i0
[J,T]=histeq(I);%J为输出图像,T为变换矩阵
图像易受光照、视角、方位、噪声等的影响。使得同一类图像的不同变形 体之间的差距有时大于该类图像与另一类图像之间的差距,影响图像识别、 分类。图像归一化就是将图像转换到唯一的标准形式以抵抗各种变换,从 而消除同类图像不同变形体之间的外观差异。也称为图像灰度归一化。
/2、图像的点运算
二、灰度的线性变换
DB f DA f ADA fB
Fa>1时,输出图像的对比度将增大;Fa<1时,输出图像对比度将减小。 Fa=1且Fb非零时,所有像素的灰度值上移或下移,使整个图像更暗或 更亮。Fa<0,暗区变亮,亮区变暗。
/2、图像的点运算