方程式赛车转向系统设计(转向系统)
大学生方程式赛车转向梯形设计与优化
大学生方程式赛车转向梯形设计与优化邵非;李传昌;徐华源【摘要】转向系统是汽车的一个重要组成部分,转向系统的性能会直接影响到方程式赛车的动态特性.基于断开式转向梯形机构的分析研究,以转向梯形底角和梯形臂长为设计变量,对转向梯形机构进行优化设计,使其趋于平行阿克曼几何,实现车辆转向系统性能和效率的提升.优化设计的结果能为方程式赛车转向系统的设计和改进提供参考.【期刊名称】《上海工程技术大学学报》【年(卷),期】2018(032)001【总页数】6页(P58-63)【关键词】转向系统;断开式转向梯形;阿克曼几何【作者】邵非;李传昌;徐华源【作者单位】上海工程技术大学汽车工程学院,上海 201620;上海工程技术大学汽车工程学院,上海 201620;上海工程技术大学汽车工程学院,上海 201620【正文语种】中文【中图分类】U463.4与普通车道相比,赛车车道具有许多大直径弯道,方程式赛车需要在行驶过程中快速、稳定地通过各种弯道,与普通车辆相比方程式赛车对于转向系统设计要求有着明显的差别.合理的转向梯形能够提升整车的性能,在一定程度上提升车辆的行驶表现.因而方程式赛车转向梯形设计在整个转向系统的设计中显得尤为重要[1].1 方程式赛车转向梯形布置方案方程式赛车转向系统主要包括:方向盘、方向盘快拆器、转向柱总成、双万向节、转向传动柱、转向器和转向横拉杆等,如图1所示.方程式赛车转向机构采用齿轮齿条式转向形式,其布置按照以下原则:转向器布置在前轴之后,后置梯形设计;要保证汽车具有较好的灵敏性,转弯时减少车轮的侧滑,减轻转向盘上的反冲力;转向传动装置及拉杆系统要有足够的刚度、强度要求;同时在整个转向过程中不能出现摩擦现象,拉杆之间不能出现死角,在转向过程中传动比的变化应尽量小[1-2].1—方向盘;2—转向柱总成;3—花键连接部件;4—双万向节;5—转向传动柱;6—转向器;7—转向横拉杆;8—鱼眼球头销;9—方向盘快拆器.图1 转向系统结构图Fig.1 Steering system structure diagram转向梯形的布置形式在一定程度上由转向器的布置形式所决定.一般齿轮齿条式转向器布置形式大体可以分为4种:中间输入,两端输出;侧面输入,两端输出;侧面输入,中间输出;侧面输入,一端输出.考虑到方程式赛车车身结构的特点,驾驶舱空间普遍狭小,方向盘被布置在汽车转向盘中间轴斜向上的位置.此外,整个转向系统不能与驾驶员的腿部空间产生干涉.因此,选择中间输入,两端输出的齿轮齿条式转向器结构布置作为本次设计最终所采用的布置方案,具体情况如图2所示,这与传统的民用车辆的转向器形式有所不同.图2 中间输入,两端输出式转向器Fig.2 Intermediate input and two output steering gear转向梯形机构由横拉杆、梯形臂等组成,分为整体式转向梯形和断开式转向梯形.整体式转向梯形的横拉杆为一体式,适用于非独立悬架;断开式转向梯形的横拉杆是断开的,适用于独立悬架[1-2].大多数方程式赛车选择使用独立悬架,当转向轮独立悬接时,相对于车架每个转向轮分别独立运动,因此本设计采用与独立悬架配用的断开式转向梯形设计方程式赛车转向传动机构,如图3所示.图3 断开式转向梯形结构Fig.3 Disconnected steering trapezoidal structure 2 断开式转向梯形的理论分析汽车转向时,由转向传动机构决定车轮是保持平行还是一个轮比另一轮转过更多的角度.根据车轮转向角关系不同可以分为3类:阿克曼几何转向、平行式转向和反阿克曼几何转向,如图4所示.图4 转向角关系类型Fig.4 Steering angle relationship types由图可见,阿克曼几何关系一般适用于横向加速度较小的车辆,可保证所有车轮都能在没有滑动的情况下自由滚动,因为所有车轮都围绕一个滚动中心滚动.而在横向加速度较大的情况下模型会有所不同.由于实际轮胎都会有一个侧偏角,内侧轮的载荷也要比外侧轮小.从轮胎性能可知负载较轻的时候获得最大侧向力所需的侧偏角较小.使用低速几何结构(阿克曼关系),前内侧轮会被迫超过对应最大侧向力时的侧偏角,导致内轮被拖动,使轮胎升温并降低车速,进而影响赛道车辆行驶的动态表现,因而对于方程式赛车而言,通常平行式转向甚至反阿克曼结构可以作为理想的解决方案.在已知轮胎参数的情况下可以计算出正确的反阿克曼量,但大部分情况下计算得到的几何关系是在汽车高速状态下,而忽略了低速状态下轮胎变小的工况,考虑以上两种行驶状态,得到一个合理的近似几何关系如图5所示.图5 齿条位于前轴之后的阿克曼几何Fig.5 Ackerman geometry of rack behind front axle后置转向能产生阿克曼几何关系,齿条以及转向器系统内的横拉杆连接是被布置在前轴之后的,从主销中心开始画线,延伸到横拉杆外端,并交于后轴中心.转向节的这个角度使内轮转向角度大于外轮(转向时外张),可以获得一个较好的近似100%的阿克曼关系.平行式阿克曼获得内外轮转角差的方法是通过改变位置的方法,通过前移或后移齿条或拉杆的位置,这时两个拉杆外端球头间的连接不再是直线连接,如图6所示.图中,后置梯形将齿条前移时倾向于平行转向,最后至反阿克曼,齿条后移将增加转向时的前轮外张量,导致内外轮转角差更大.在此次转向梯形的设计中,选择平行式.图6 齿条移动对转向几何关系的影响Fig.6 Influence of rack travel on steering geometry2.1 断开式转向梯形机构数学模型分析阿克曼理论转向几何特性是指各个车轮只滚动不滑动且各车轮必须围绕一个中心点O转动,这个中心点O要落在后轴中心线的延长线上,左、右前轮也必须以O为圆心而转动,称为转向中心,如图7所示.由于车辆在行驶过程中受到轮胎侧偏角的影响,所有车轮不能实现理论中那样绕后轴的延长线上一点运动,而是绕处于前后轴之间的某一点运动.该点主要与前后轮胎的侧偏角有关,由于存在很多不确定的因素影响前后轮侧偏角大小,不能精确地测算.一般在分析中忽略轮胎侧偏角的影响,在此前提下满足理论分析情况,即前后轮绕处在后轴延长线上的瞬时转向中心运动[2].图7 理想状态下的内、外车轮转角关系Fig.7 Inner and outer wheel angles relationshipin ideal condition设θo为外侧转向轮转角;θi为内侧转向轮转角;L为汽车轴距;K为两主销中心延长线与地面的交点之间的距离.若要保证全部车轮绕一个瞬时转向中心行驶,则梯形机构应保证内外侧转向轮的转角关系为(1)若自变角为θo,则因变角θi的期望值为(2)现有的转向梯形仅能够近似满足以上关系式,利用余弦定理可以得到转向梯形实际的因变角为(3)式中:m为转向梯形臂长;γ为转向梯形底角.设计出的转向梯形的实际因变角应尽可能地接近理论上的期望值θi,二者之间的偏差在转向盘的中间位置转角较小的范围内应尽量变小,这样可以改善汽车在高速行驶时轮胎的磨损状况;而在汽车速度小一级、转弯角度大并且较低使用频率的情况下,可以适当地放宽设计的要求.因此,引入加权因子ω(θi),构成评价转向梯形机构设计优劣的目标函数为f(x),表示为(4)将式(2)和式(3)代入式(4)得(5)式中:x为设计变量,为外侧转向轮最大转角.根据图7理想状态下的内外侧车轮转角关系,可以得到以下计算公式(6)式中:Dmin为汽车最小转弯直径;a为主销偏移距离.选用加权因子时,重点考虑在常用工况下,转角θo需要小于20°,并且使用最频繁的是10°以内的小转角,因此取(7)在设置相关约束条件时,要重点考虑到:当选用m和γ参量太小时,从而会使得作用在横拉杆的转向力过大;当m过大,而梯形底角没有发生变化时,会使得转向梯形机构整体的布置偏难.因此,有必要对m的上、下限和γ的下限进行相关的条件约束.所以,无须限制γ的上限.通过考虑以上的所有因素,最后得到转向梯形相关参数的约束条件为(8)在设计过程中,m一般取mmin=0.11K,mmax=0.15K,其中K=900,梯形底角γmin=65°,即99≤m≤135,γ≥65°,δ≥δmin=40°.同时,考虑到四连杆机构的传动角δ不可以太小,因此通常取40°.汽车在进行右转弯至极限位置的时候,转向梯形机构相关参数达到最小值,因此,只需要考虑右转弯时δ≥δmin即可.通过运用此图所做的辅助线及和弦定理,可以得出最小传动角的相对约束条件为(9)式中,δmin为最小传动角,由分析可知δmin=40°,由可知,设计变量m及γ的相关函数为δmin.2.2 建立转向梯形机构模型根据赛道规则和方程式赛车的设计经验,制定转向技术参数[2-3],见表1.表1 转向系统技术参数表Table 1 Technical parameters table of steering system项目参数项目参数横拉杆长度/mm203梯形臂长度/mm54~110转向角传动比4.5∶1梯形底角/(°)60~100转向器长度/mm388齿条行程/mm17.8最小转弯半径/m5对于样车而言,其中两主销中心的延长线与地面交点间距K=1 168.4 mm,汽车轴距L=1 684 mm,左右梯形臂长度分别为AO=BO1=54.9 mm,整个转向器左右两断开点间距(即连接转向横拉杆两球头销间距)为387.858 mm;前轴主销内倾角为0,齿条最大伸长量为S=17.79 mm,前轴主销后倾角4°,根据最小转弯半径为5 000 mm,可以得到其最大内轮转角为26°;转向器到前轴距离H=88.9 mm.通过上述已知条件,将整个转向系统的立体机构投影并利用SolidWorks软件建立平面梯形机构,如图8所示.AO、BO1为梯形臂;AC、BD为转向横拉杆;CD为转向器.图8 转向梯形平面图Fig.8 Steering trapezium plan3 基于Matlab的转向梯形机构仿真3.1 建立目标函数根据式(1)至式(9)以及约束条件,运用Matlab语句并在Editor窗口中进行编写,保存为可调用的 .m文件,然后使用建立的目标函数进行分析[4-6].3.2 确定转向梯形臂长及底角设计参数范围通过Matlab软件建模分析得到了相关的数据曲线,可以得出在转向梯形机构中,梯形底角的改变所引起的对应的相关角度变化情况比梯形臂长度的变化影响更大.所以,梯形臂长度先采用理论的梯形臂长度,即初始梯形臂长度为110 mm,初始梯形底角是本次Matlab设计中主要的影响因素.当梯形臂长度为110 mm和初始梯形底角为62°时,输出角随着输入角的变化得到相应的实际值与期望值曲线,如图9(a)所示.当梯形臂长度为110 mm和初始梯形底角为80°时,输出角随着输入角的变化得到相应的实际值与期望值曲线,如图9(b)所示.通过曲线的显示可以得到,输出角实际情况和理论情况相差很大,所以,两组梯形底角不能成为最优的设计参数.3.3 转向梯形机构优化方案确定通过不断地改变自变量及仿真计算,最后确定合适的初始梯形底角范围为67°~70°.通过软件分析计算各个初始底角所模拟的实际曲线与理想曲线的偏差和重合度,对比实际值和理论值,最后确定转向最佳梯形底角为γ=68°,软件计算模拟曲线如图10所示.两曲线图的重合度也反映实际值和理论值的符合程度.经过上述计算及分析,最终转向梯形最佳的梯形臂长度确定为m=110 mm,梯形底角确定为γ= 68°.当内轮转角为7.65°时,外轮实际转角大概确定为4.68°,而此时的阿克曼转向几何的理论外轮转角为5.32°,因而相较于理论阿克曼,多出0.64°可以用以弥补内外轮的侧偏角之差,同时该转向梯形的设计较好满足设计要求,达到了转向梯形正常的功用以及方程式赛车对于转向系统的规则和性能要求.(a) γ=62°(b) γ=80°图9 不同梯形初始底角时赛车输出转角图 Fig.9 Racing output corner diagram with differentinitial trapezoidal angles图10 改进后输出角随输入角变化实际值与期望值曲线Fig.10 Actual value and expected value curves of improvedoutput angle with change of input angle4 结语本文主要针对大学生方程式赛车转向系统关键参数即转向梯形参数进行分析,使用仿真软件建立转向梯形函数模型并优化相关参数.用最小二乘法得到最接近理论阿克曼的梯形底角,通过逐渐改变梯形底角使其趋于平行阿克曼几何,确定了理想的梯形臂长度及梯形底角,满足了赛车转向系统的设计要求.此设计在一定程度上提升了转向系统的整体性能,起到了降低内外侧车轮侧偏角之差的作用,减少转向不足趋势并避免内侧的轮胎磨损,提升了方程式赛车在过弯时的动态表现.研究的结果可为方程式汽车及其他车辆转向系统的设计提供参考价值.参考文献:[1] 吉林大学,王望予.汽车设计[M].4版.北京:机械工业出版社,2016.[2] 蔡武.汽车转向梯形机构设计中的参数定义[J].专用汽车,2007(1):40-41.[3] 刘偲.某微型客车的电动助力转向系统匹配设计研究[D].长沙:湖南大学,2012.[4] 向铁明,周水庭,何明光.拖拉机转向梯形机构的MATLAB优化与转向特性分析[J].云南农业大学学报,2015,30(2):283-288.[5] 石启龙,杨建伟.基于MATLAB的断开式转向梯形机构的优化设计[J].机械设计及制造,2011(2):8-10.[6] ZHANG L,DONG E G,XING Y Y.Steering trapezoid mechanism design based on Monte Carlo method[C]//Proceedings of 2011 International Conference on Electronic & Mechanical Engineering & Information Technology.Harbin:IEEE,2011.。
方程式赛车动力系统设计(本科毕业设计)

一、设计步骤设计背景:本文基于扬州大学力行车队的方程式赛车进行研究,阐述 FSAE赛车动力系统匹配现状与发展的相关问题。
通过对方程式赛车的电机参数、传动比、电池组容量进行匹配设计,借以寻找一种有效的动力系统优化思路。
在保证赛车动力系统运行水平的基础上,持续改进系统功能及其运行策略,最终进一步提高FSAE 赛车动力系统的运行能力,使得所设计以及制造的方程式赛车能够满足FSAE赛事比赛的要求。
主要内容如下:(1)参考对比国内高校方程式赛车电动汽车的整车布置方式,设计本文所要求设计的扬州大学电动方程式赛车的布置方式;(2)以本校电动赛车基本参数和设计目标为基础进行动力系统参数设计,对电机、传动装置及能源系统进行结构设计和总体性能计算;(3)使用CATIA软件进行系统建模,对电机、电池、控制器以及驱动桥的位置进行合理布置,做好动力系统的总布置图;(4)按照设计任务书中对赛车的动力性和经济性的要求,对赛车的动力系统进行参数匹配,最终确定整车动力系统组成部分的选型。
在Optimum Lap软件中建立赛道模型,通过软件分析方程式赛车的比赛工况;(5)基于CRUISE软件进行赛车的性能仿真,对影响赛车的经济性与动力性的几个因素进行分析,验证所设计的动力系统各部分参数的准确性;二、设计思路图1-3 整体设计技术路线三、设计内容赛车的设计是从赛车的总布置开始,涉及车架、车身、底盘、传动、转动、可靠性和稳定性测试等多方面内容[13]。
纯电动赛车与传统的燃油赛车相比,由于动力源的差异,所以纯电动赛车没有发动机和油箱,代之以动力电池系统以及电机驱动系统。
FSEC纯电动方程式赛车是本着对传统车辆的加速、制动和操纵性能进行创新设计,赛车的总布置是一个穿插赛车设计始末的过程,总布置的确定对赛车的性能有着重要的影响。
三、系统布置整个赛车的组成结构如图2-2所示,主要有驱动系统、能源系统、车架车身、底盘系统等基本结构要素。
图 2-2 整车部分系统布置四、控制系统由于FSAE赛车实质上就是一辆纯电动汽车,因此赛车的动力系统也与纯电动汽车相似,都是由电机和电机控制器组成。
FSAE赛车转向系统的研究与设计

FSAE赛车转向系统的研究与设计大学生方程式大赛(FSAE)是为热爱赛车的在读大学生举办的一项竞赛。
汽车的转向系统是用来保持或者改变行驶方向的机构。
本文从该角度分析了赛车转向系统的作用、基本构成、要求和总体性能。
标签:FSAE赛车;齿轮齿条式转向器;设计一、研究意义FSAE旨在通过学生亲手设计制造一辆满足大赛要求的赛车,来提高学生对汽车设计知识的拓展应用能力和实际加工动脑动手能力。
大赛赛道设有转向半径较小的急转弯道和间距不等的障碍道,需要赛车转向系统灵敏、轻便、高效。
FSAE 赛车的转向系统设计能使车手在比赛时更好地高速避障、入弯出弯及紧急转向保证行车安全。
二、FSAE转向系统概述转向系统是用来保持或者改变车辆行驶方向并在车辆转向行驶时保证各转向轮之间有协调的转角关系的机构。
FSAE大赛规定仅使用机械转向系统,即依靠驾驶员的手力转动转向盘,经转向器和转向传动机构使转向轮偏转。
转向器作为改变汽车行驶方向及保持汽车稳定直线行驶的关键零部件,其性能至关重要。
转向系统的技术状况,对于保证行驶安全、减轻驾驶员劳动强度和延长车辆使用寿命均有很重要的作用。
如何改善赛车转向系统的操纵稳定性、灵敏性、可靠性和轻便性,应作为设计工作的重点。
另外,合适的转向器对转向系统也很重要。
比赛还规定:转向系統必须安装有效的转向限位块,以防止转向连杆结构反转;限位块可安装在转向立柱或齿条上,并且必须防止轮胎在转向行驶时接触悬架、车身或车架部件;转向系统的自由行程不得超过7°;方向盘必须安装在快拆器上,保证车手在正常驾驶坐姿并配戴手套时可以操作快拆器;方向盘轮廓必须为连续闭合的近圆形或近椭圆形。
三、FSAE赛车转向系统设计初始参数:1.转向盘总圈数≤3.02.转向盘直径≤200mm3.最大转向盘操纵力≤100N4.转向盘在上下方向的最大调节量≥50mm转向系统的设计要求:(1)保证汽车有较高的机动性;(2)汽车转向时,全部车轮应绕一个瞬时转向中心旋转,不应有侧滑;(3)传给转向盘的反冲要尽量小;(4)转向后转向盘应自动回正,并使汽车保持直线行驶状态;(5)发生车祸时,当转向盘和转向轴由于车架和车身变形后移时,转向系统最好有保护机构防止伤到乘员。
大学生方程式赛车设计——转向系统

赛车转向系统是用于改变或保持赛车行驶方向的专门机构。
起作用是使赛车在行驶过程中能按照车手的操纵要求而适时地改变其行驶方向,并在受到路面传来的偶然冲击及赛车意外地偏离行驶方向时,能与行驶系统配合共同保持赛车继续稳定行驶。
因此,转向系统的性能直接影响着赛车的操纵稳定性和安全性。
对赛车的行驶安全至关重要,因此赛车转向系统的零件都称为保安件。
赛车转向系统和制动系统都是赛车安全必须要重视的两个系统。
当转动赛车方向盘时,车轮就会转向。
为了使车轮转向,方向盘和轮胎之间发生了许多复杂的运动。
最常见的赛车转向系统的工作原理包括:齿条齿轮式转向系统和循环球式转向系统。
当赛车转向时,两个前轮并不指向同一个方向。
要让赛车顺利转向,每个车轮都必须按不同的圆圈运动。
由于内车轮所经过的圆圈半径较小,因此它的转向角度比外车轮要大。
如果对每个车轮都画一条垂直于它们的直线,那么线的交点便是转向的中心点。
转向拉杆具有独特的几何结构,可使内车轮的转向度大于外车轮。
赛车转向系统分为两大类:机械转向系统和动力转向系统。
a机械转向系统:完全靠车手手力操纵的转向系统。
b动力转向系统:借助动力来操纵的转向系统。
动力转向系统又可分为液压动力转向系统和电动助力动力转向系统。
机械转向系以车手的体力作为转向能源,其中所有传力件都是机械的。
机械转向系由转向操纵机构、转向器和转向传动机构三大部分组成(如图)。
车手对转向盘施加的转向力矩通过转向轴输入转向器。
从转向盘到转向传动轴这一系列零件即属于转向操纵机构。
作为减速传动装置的转向器中有级减速传动副。
经转向器放大后的力矩和减速后的运动传到转向横拉杆,再传给固定于转向节上的转向节臂,使转向节和它所支承的转向轮偏转,从而改变了赛车的行驶方向。
这里,转向横拉杆和转向节属于转向传动机构。
转向操纵机构由方向盘、转向轴、转向管柱等组成,它的作用是将车手转动转向盘的操纵力传给转向器。
机械转向器(也常称为转向机)是完成由旋转运动到直线运动(或近似直线运动)的一组齿轮机构,同时也是转向系中的减速传动装置。
转向梯形机构设计报告
采用齿轮齿条式转向器的转向梯形机构优化设计报告指导老师:***学生:黄志宇学号:********专业班级:车辆工程04班重庆大学方程式赛车创新实践班二〇一七年二月赛车转向系统是关系到赛车性能的主要系统,它是用来改变或恢复汽车行驶方向的系统的总称,通常,车手通过转向系统使转向轮偏转一定角度实现行驶方向改变。
赛车转向系统一股由方向盘、快拆、转向轴、转向柱、万向节、转向器、转向拉杆、梯形臂等部分组成。
其中,方向盘用于输入转向角度,快拆用于快速分离方向盘与转向柱,转向柱、转向轴、万向节共同将方向盘输入角度传递到转向器,转向器通过内部传动副机构将旋转运动转化为转向拉杆的直线运动,转向拉杆与梯形臂作用于转向节,实现车轮转向。
图1展示了转向系梯形结构,图2展示了赛车转向系统构成。
图1转向梯形机构图2赛车转向系统构成由于大赛组委会规则里面明确规定不允许使用线控或者电动转向,考虑到在赛车转向系统布置空间有限,且有严格的成本限制,以及轻量化的赛车设计目标,将赛车转向器范围限定机械式转向器。
目前,国内外的大多数方程式赛车采用齿轮齿条式转向器和断开式转向梯形结构。
●齿轮齿条式转向器齿轮齿条式转向器的传动副为齿轮齿条,其中,齿轮多与转向柱做成一体,齿条多与转向横拉杆直接连接,连接点即为断开点位置。
根据输出位置不同,分为两端输出式和中间输出式。
其主要优点是:结构简单,体积小,易于设计制作;转向器可选材料多样,壳体可选用招合金,质量轻;传动效率较高;容易实现调隙,当齿轮齿条或者齿条与壳体之间产生间隙时,可以通过安装在齿条背部的挤压力可调的弹簧来消除间隙;转向角度大,制造成本低。
其主要缺点是:传动副釆用齿轮齿条,正效率非常髙的同时,逆效率非常高,可以到达当汽车在颠簸路面上行驶时,路感反馈强烈,来自路面的反冲力很容易传递到方向盘;转向力矩大,驾驶员操纵费力,对方向盘的反冲容易造成驾驶员精神紧张,过度疲劳。
●断开式转向梯形结构根据转向器和梯形的布置位置的不同,断开式转向梯形又分为四类,分别为:转向器前置梯形前置,转向器后置梯形后置,转向器前置梯形后置,转向节后置梯形前置。
FSAE 赛车转向系统CAD 与CAE 设计
科技与创新┃Science and Technology&Innovation ·162·2021年第14期文章编号:2095-6835(2021)14-0162-03FSAE赛车转向系统CAD与CAE设计纪楚凡(武汉理工大学汽车工程学院,湖北武汉430000)摘要:在方程式赛车中,转向系统是最重要的组成部分之一,而齿轮齿条式转向器具有传动效率高、结构简单、制作成本低的优点,因此广泛应用于方程式赛车中。
为了使方程式赛车具有最优的转向性能,应用CAD/CAE软件对转向系统进行建模与仿真。
其中,利用CATIA建立转向系统的三维模型,利用ANSYS对其进行静力学分析,最后利用机械系统动力学分析软件ADAMS进行动力学分析。
最终获得了理想的阿克曼百分比,同时获得了理想的转向系统参数,从而使转向系统具有良好的操作稳定性和平顺性,使驾驶员获得最优的操作体验。
关键词:齿轮齿条;转向;方程式赛车;CAE分析中图分类号:U463.4文献标志码:A DOI:10.15913/ki.kjycx.2021.14.066中国大学生方程式汽车大赛是一项由中国汽车协会主办的,由高等院校汽车工程或汽车相关专业在校学生组队参加的汽车设计与制造比赛。
各参赛车队按照赛事规则和赛车制造标准,在一年的时间内自行设计和制造出一辆在加速、制动、操控性等方面具有优异表现的小型单人座休闲赛车,能够成功完成全部或部分赛事环节的比赛。
在FSAE赛车的设计开发中,转向系统是车手与赛车进行联系与互动最紧密的系统。
转向系统性能的优劣直接决定着整车操纵稳定性和平顺性的好坏,在整个赛车的设计过程中占有非常重要的地位。
随着计算机的诞生与发展,计算机辅助设计工程技术即CAD/CAE技术在汽车行业获得了广泛的应用。
应用CAD/CAE技术对赛车转向器进行设计,提高了设计参数的准确性,降低了成本,大大提高了整车设计过程中的效率。
1转向器的三维建模FASE赛车的转向系统主要由齿轮、齿条、壳体、转向传动轴、横拉杆、万向节等组成。
FSAE赛车转向系统设计及性能分析任务书及开题报告资料

附件一毕业设计任务书设计(论文)题目FSAE赛车转向系统设计及性能分析学院名称汽车与交通工程学院专业(班级)车辆工程姓名(学号)胡嗣林指导教师张代胜系(教研室)负责人卢剑伟一、毕业设计(论文)的主要内容及要求(任务及背景、工具环境、成果形式、着重培养的能力)背景:中国汽车工业已处于大国地位,但还不是强国。
从制造业大国迈向产业强国已成为中国汽车人的首要目标,而人才的培养是实现产业强国目标的基础保障之一。
中国大学生方程式汽车大赛(以下简称"FSAE")是中国汽车工程学会及其合作会员单位,在学习和总结美、日、德等国家相关经验的基础上,结合中国国情,精心打造的一项全新赛事。
FSAE活动由各高等院校汽车工程或与汽车相关专业的在校学生组队参加。
FSAE要求各参赛队按照赛事规则和赛车制造标准,自行设计和制造方程式类型的小型单人座休闲赛车,并携该车参加全部或部分赛事环节。
比赛过程中,参赛队不仅要阐述设计理念,还要由评审裁判对该车进行若干项性能测试项目。
在比赛过程中,参赛队员能充分将所学的理论知识运用于实践中。
同时,还学习到组织管理、市场营销、物流运输、汽车运动等多方面知识,培养了良好的人际沟通能力和团队合作精神,成为符合社会需求的全面人才。
大学生方程式赛车活动将以院校为单位组织学生参与,赛事组织的目的主要有:一是重点培养学生的设计、制造能力、成本控制能力和团队沟通协作能力,使学生能够尽快适应企业需求,为企业挑选优秀适用人才提供平台;二是通过活动创造学术竞争氛围,为院校间提供交流平台,进而推动学科建设的提升;大赛在提高和检验汽车行业院校学生的综合素质,为汽车工业健康、快速和可持续发展积蓄人才,增进产、学、研三方的交流与互动合作等方面具有十分广泛的意义。
任务:调研国内外赛车转向系统结构及原理,遵循FSAE竞赛规则完成赛车转向系统设计,转向梯形优化,系统建模与转向性能分析。
工具环境:CATIA/UG AutoCAD ADAMS Visio MATLAB Office办公软件等成果形式:①翻译相关外文文献不少于5000字②优化设计说明书一份③赛车转向系统三维模型一份能力培养:培养和锻炼学生搜集相关资料,综合运用所学汽车设计知识解决实际问题的能力、提高学生软件应用能力、独立完成赛车转向系统设计及相关问题的能力,为从事本专业有关工作打下坚实基础。
大学生F1方程式赛车整车设计毕业论文

大学生F1方程式赛车整车设计毕业论文大学生F1方程式赛车整车设计摘要本文基于汽车理论课程实践所做的BAJA赛车模型,并结合FSAE 赛车比赛规则和赛道的布置特点,进行拓展设计一款大学生F1方程式赛车。
从赛车底盘角度出发,本文侧重于汽车车架的设计,因为车架是整车的重要组成部分,它不仅承受着来自路面的各种复杂载荷,同时也是其他总成的安装载体。
通过有限元法对车架结构进行分析,对提高整车的各种性能有重要的意义。
本文根据《中国FSC大赛规则(2012)》要求,首先利用UG6.0软件对赛车车架进行结构设计,建立起多个车架的三维模型,然后将设计出来的多个车架以及BAJA模型的车架导入到有限元软件中,对车架进行静力学分析,通过对比静力和应力分布图分析选出更优秀的车架。
同时对Formula SAE赛车的发动机系统、车轮系统、传动系统、悬架系统、转向系统、制动系统等进行选型和整体布置,然后根据所选的总成参数对整车动力性能进行匹配以及整车动力性能进行分析,从而设计出一款符合大赛要求同时性能优异的赛车。
关键词:UG,大学生F1方程式赛车,车架,有限元分析,动力匹配Formule SAE Collegiate Design of The Racing CarABSTRACTThe article is Based on the BAJA racing car model which is made at the Practice of Automobile Theory Course , and at the same time with combinations of the FSAE car racing game rules and the circuit layout characteristics, to expand the design of a formula sae race car. Start from the chassis of the car , this article focuses on the design of automobile frame, because the frame is an important part of vehicle, it not only suffered from a variety of complex surface load, at the same time it is the carrier to installthe other assembly. Through the finite element method analysis of frame structure, has important significances to improve the vehicle performance. According to《FSC contest rules (2012) of the People's Republic of China》requires, first of all, using the software of UG6.0 to carrry out on the car frame structure design, setting up multiple 3 d model of the frame, and then imported multiple frame and BAJA model frame into the finite element software, using the statics to analysis the frame, by comparing the static and stress distribution analysis to select the better frame. To select the type of Formula SAE racing car engine system, the wheel system,the transmission system, the suspension system, the steering system and the brake system and layout of the whole, and then according to the parameters of the selected to match the vehicle dynamic performance and analyzed the vehicle dynamic performance , Thus design a car to match requirements of the competition and also have performances.KEY WORDS:UG, the formula 1 racing car of College students, frame ,finite element analysis , dynamic matching.目录第一章绪论1.1、 Formule SAE概述1.1.1、背景1.1.2、发展及现状1.2、任务及目标第二章赛车总体参数与主要总成的选择2.1、概述2.1.1、总体设计因满足的要求2.1.2、总体设计的目的2.2、汽车形式的选择2.2.1、轴数2.2.2、驱动形式2.2.3、布置形式2.3、汽车主要参数的选择2.3.1、汽车主要尺寸的确定2.3.2、汽车质量参数的确定2.3.3、汽车动力性参数的确定2.4、发动机的选择2.4.1、发动机限制2.4.2、发动机主要性能指标的选择2.4.3、进气系统2.4.4、排气系统2.5、传动系统2.5.1、变速箱性能参数的确定2.5.2、主减速器及差速器的确定2.6、轮胎和轮辋的选择2.7、悬架系统的选择2.7.1、比赛要求2.7.2、悬架的作用2.7.3、悬架的分类2.7.4、悬架的选择2.7.5、方程式赛车悬架的特殊性2.8、制动系统的选择2.8.1、制动系统要求2.8.2、制动器的分类2.8.3、制动器的选择2.9、转向系统的选择2.9.1、转向的要求2.9.2、转向系的确定2.10、车架形式的选择2.10.1、车架的定义2.10.2、车架的设计2.10.3、车架的分类第三章赛车整车的总体设计3.1、车架的设计3.1.1、车架的设计流程3.1.2、车架设计要求3.1.3、名词解释3.1.4、车架设计过程3.1.4.1、前环以及前斜撑设计3.1.4.2、主环设计3.1.4.3、支撑要求3.1.5、车架材料的选择3.1.6、车架焊接方式的选择3.2、其他部件的三维建模3.2.1、发动机总成以及变速箱三维建模3.2.2、制动总泵以及各个踏板的三维建模3.2.3、悬架系统建模3.2.4、制动系统的三维建模3.2.5、车轮三维建模3.2.6、后驱动桥三维建模3.2.7、转向系统的设计3.2.8、油箱三维模型的建立3.2.9、车身的设计3.2.10、座椅的设计3.2.11、赛车的总装第四章整车设计中的关键问题4.1、车架强度校核4.1.1、有限元软件介绍4.1.2、有限元模型的建立4.1.3、模型的简化及建立4.1.4、网格划分4.1.5、车架静力学分析4.1.5.1、车架静态载荷分析4.1.5.2、工况分析及边界条件处理4.1.5.3、弯曲工况分析4.1.5.4、制动工况的分析4.1.6、车架刚度分析4.1.6.1、车架扭转刚度分析4.1.6.2、车架弯曲刚度分析4.1.7、车架模型(二)的有限元模型分析4.2、动力系统计算匹配及评价4.2.1、概述4.2.2、动力性能计算4.2.2.1、动力性相关公式4.2.2.2、计算过程及结果4.2.2.3、本节结论第五章结论参考文献致谢绪论1.1、Formule SAE概述1.1.1、背景Formula SAE,是由各国SAE,即汽车工程师协会举办的面向在读或毕业7个月以内的本科生或研究生举办的一项学生方程式赛车比赛,要求在一年的时间内制造出一辆在加速、刹车、操控性方面有优异的表现并且足够稳定耐久,能够成功完成规则中列举的所有项目业余休闲赛车。
大学生方程式赛车整车优化设计
科技与创新┃Science and Technology&Innovation ·44·2020年第16期文章编号:2095-6835(2020)16-0044-03大学生方程式赛车整车优化设计王世权,任豪放(武汉理工大学汽车工程学院,湖北武汉430070)摘要:以武汉理工大学WUT车队2019赛季赛车为例,描述了一种以《2019中国大学生方程式大赛规则》为设计依据,利用CATIA软件进行建模,ANSYS软件进行仿真分析来对赛车进行设计的方法。
详细论述了赛车动力系统和底盘传动、转向、行驶、制动系统以及赛车车身车架、电气系统的优化设计方案,从而达到设计目标,为大学生方程式赛车整车设计与优化提供参考。
关键词:中国大学生方程式赛车;动力系统;传动系统;车身车架中图分类号:U462.2文献标识码:A DOI:10.15913/ki.kjycx.2020.16.018中国大学生方程式汽车大赛是一项由高等院校在校学生组队参加的汽车设计与制造比赛。
各参赛车队需遵照规则和制造标准,在一年时间内自行设计并制造出一辆性能优异的赛车,最后争取成功完成全部或部分赛事环节[1]。
随着中国大学生方程式汽车大赛的发展,越来越多的车队加入到比赛当中,并且合理地运用各项新技术,使赛车的性能有了很大的提高。
1总体设计概述1.1设计目标设计目标主要包括满足规则要求、提升赛车操纵性、提高赛车动力性、实现赛车轻量化。
1.2整车主要参数本赛季赛车主要参数如表1所示。
表1整车参数表序号名称数值1轴距/mm15802前轮距/mm12303后轮距/mm11704前后载荷比45∶555质心高度/mm3006主传动比 2.9097发动机类型HONDA CBR600-RR8差速器类型德雷克斯勒9换挡方式气动换挡2动力系统设计结合以往赛季经验,本赛季依旧采用HONDA CBR600-RR发动机。
动力总成各部分进行如下优化:①进气系统优化;②排气系统重新设计,自主设计制作阻抗式消音器;③低油底壳高度。
转向系统开题报告

第一章总论一.赛事简介和设计目的及意义中国大学生方程式汽车大赛(简称“中国FSAE”)是一项由高等院校汽车工程或汽车相关专业在校学生组队参加的汽车设计与制造比赛。
各参赛车队按照赛事规则和赛车制造标准,在一年的时间内自行设计和制造出一辆在加速、制动、操控性等方面具有优异表现的小型单人座休闲赛车,能够成功完成全部或部分赛事环节的比赛。
2010年第一届中国FSAE由中国汽车工程学会、中国二十所大学汽车院系、国内领先的汽车传媒集团——易车(BITAUTO)联合发起举办。
中国FSAE秉持“中国创造擎动未来”的远大理想,立足于中国汽车工程教育和汽车产业的现实基础,吸收借鉴其他国家FSAE 赛事的成功经验,打造一个新型的培养中国未来汽车产业领导者和工程师的交流盛会,并成为与国际青年汽车工程师交流的平台。
中国FSAE致力于为国内优秀汽车人才的培养和选拔搭建公共平台,通过全方位考核,提高学生们的设计、制造、成本控制、商业营销、沟通与协调等五方面的综合能力,全面提升汽车专业学生的综合素质,为中国汽车产业的发展进行长期的人才积蓄,促进中国汽车工业从“制造大国”向“产业强国”的战略方向迈进。
本次毕业设计的题目为FSAE方程式赛车转向传动机构的设计,目的在于设计一套适用于FSAE方程式赛车的转向传动机构,配合其制动系,传动系,行驶系及其他机构使赛车的性能满足大赛的要求。
当然,通过此次设计,也可以让我回顾大学四年所学的专业知识,对自己大学学习的课程有一个更为深刻的总结,使自己成为符合新时代的汽车产业人才。
二.国内外赛车转向系统研究现状及发展赛车在行驶中,经常需要改变行驶方向,这就需要有一套用来控制赛车行驶方向的机构,这套机构称为赛车转向系统(steering system)。
赛车行驶方向的改变是由驾驶员通过操纵转向系统而改变转向轮的偏转角度来实现的。
赛车转向系统分为两大类:机械转向系统和动力转向系统。
完全靠驾驶员手力操纵的转向系统称为机械转向系统。
方程式赛车的转向系统(s)

大学生方程式赛车转向系统设计1、概述汽车产品的质量检测具有重大的社会意义。
转向器作为汽车的一个重要部件,对其综合性能进行检测直接关系到人民的生命财产安全。
根据汽车安全性统计,,全世界每年因交通事故死亡的人数超过20万,加之几倍于死者的受伤者以及物质上的损失,其直接或间接的危害是难以估计的。
在我国,因为交通管理技术落后、路况差、车辆性能差,加之各类车辆混合行驶,交通事故时有发生。
近年来,我国交通事故死亡人数居世界前几位,每万辆车平均事故居大国中第一位。
交通事故己成为一个严重的社会问题。
概括交通事故的原因,不外乎人、汽车和环境三个因素。
显而易见,提高汽车的安全性能是减少交通事故的关键措施之一,因此,汽车工业发达的国家都非常重视汽车安全性的研究。
目前汽车工业己成为我国的支柱产业之一,所以,为了提高汽车的质量,保证行驶的安全性,在大力发展我国的汽车工业的同时,这就要求生产厂家对每一批产品必须进行质量检测,而其中转向器是汽车维持驾驶员给定方向稳定行驶能力(即操纵稳定性)的基本保障,所以汽车转向器综合性能试验成了汽车性能测试中的一个重要项目。
因为汽车转向器属于汽车系统中的关键部件,它在汽车系统中占有重要位置,因而它的发展同时也反映了汽车工业的发展,它的规模和质量也成为了衡量汽车工业发展水平的重要标志之一。
近年来随着我过汽车工业的迅猛发展,作为汽车的重要安全部件—汽车转向器的生产水平也有了很大的提高。
在汽车转向器生产行业里,70年代推广循环球转向器,80年代开发和推广了循环球变传动比转向器,到了90年代,驾驶员对汽车转向器性能的要求有了进一步的提高,要求转向更轻便,操纵更灵敏。
随着汽车的高速比和超低压扁轮胎的通用化,过去的采用循环球转向器和循环球变传比转向器只能相对的解决转向轻便性和操纵灵敏性问题,现在虽然转向器以向动力转向发展,但大部分汽车还应用机械型转向器,如何改进转向器的设计,使之更加适合驾驶者,是最重要的,因此还需不断改进。
FSAE不等长双横臂式悬架与转向系统的优化
FSAE不等长双横臂式悬架与转向系统的优化摘要:通过adams仿真分析各类悬架优劣,完善悬架结构,使其拥有更好的性能。
通过优化悬架参数,减少由不平路面传给车架或车身的冲击力引起的震动,保证车辆的平顺性和稳定性。
同时使用载荷提取,将提取到的载荷加之于CAE仿真中,用ansys进行拓扑优化,在保证整车安全性能的情况下,能降低整车质量,以达到轻量化。
关键词:adams仿真:载荷提取;拓扑优化一,绪论1.1研究目的悬架与转向系统是一辆车不可缺少的一部分,设计的最初目的是为了保证车辆具有良好的操纵稳定性以平顺性,考虑到赛事规则,为具有可靠性,调整便捷性,结构合理性以及轻量化等方面,通过CAE仿真来模拟运动,优化模型以获得相较车辆最优良的参数数据。
1.2研究方法及主要研究内容采取了Adams car和Ansys的联合仿真,首先通过Adams先建立模型和相应的运动副,通过静态分析、平行轮跳等一系列的运动仿真,作出一系列数据以及仿真图,并通过调节硬点位置悬臂长度和倾角等来使曲线达到相对预期数值。
同时,采用Adams car中的载荷提取功能,对悬架各关键连接部位进行力的提取,然后通过Ansys的静态力学分析对零件的危险工况进行受力分析,在保证强度的同时也兼具轻量化。
二,悬架参数计算及模型2.1数据计算根据方程式赛车的初步悬架参数,首先需要定下偏频侧倾梯度等数据。
后考虑到悬架的整体布置,需考虑到轮距轴距等。
悬架的刚度会较大的影响车辆的操作稳定性,同时良好的悬架性能能提高弯道灵活性。
根据空气动力学的仿真得出本赛车在v=16.67m/s的速度下会产生800N的下压力,将侧倾角控制在±1.2°,整车俯仰角控制在±0.75°,分别对应1.8g转向和1.15g制动的情况,对应侧倾0.6deg/g,线刚度0.65deg/g。
2.2,初步硬点确定在推拉杆的选取上,我们采用前悬拉杆后悬推杆,理由是在为符合车身的空气动力学,拉杆可位于车底,便于整体结构,而后悬为拥有足够的性能且对整体影响不像前悬一样大,通过分析后,推杆更能达到完美预期。
方程式赛车转向系统设计(转向系统)
毕业设计(论文)题目大学生方程式赛车设计(转向器设计)2013年 5 月30 日方程式赛车转向系统设计(转向系统)摘要赛车转向系的设计对赛车转向行驶性能、操纵稳定性等性能都有较大影响。
在赛车转向系设计过程中首先通过转向系统受力计算和UG草图功能进行运动分析,确定转向系的传动比,确定了方向盘转角输入与轮胎转角输出之间的角传动比为3.67;运用空间机构运动学的原理,采用Matlab软件编制转向梯形断开点的通用优化计算程序,确定汽车转向梯形断开点的最佳位置,从而将悬架导向机构与转向杆系的运动干涉减至最小;然后采用UG运动分析的方法,分析转向系在转向时的运动,求解内外轮转角、拉杆与转向器及转向节臂的传动角、转向器的行程的对应关系,为转向梯形设计及优化提供数据依据。
完成结构设计与优化后我们对转向纵拉杆与横拉杆计算球铰的强度与耐磨性校核以及对一些易断的杆件进行了校核计算,确保赛车有足够的强度与寿命。
完成了对转向轻便性的计算,我们计算了转向轮的转向力矩M,转以及转向盘回转总圈数n,以确认是否达到赛车规则中转向盘上作用力p手所规定的要求以及转向的灵活性与轻便性。
最后我们建立三维模型数据进行预装配,在软件上检查我们设计的转向系是否存在干涉等现象以及检查我们的转向系是否满足我们的设计要求,对我们的设计进行改进。
关键词:赛车,转向,UG,转向梯形,运动分析,齿轮齿条The design of Formula front and rear suspension andsteering system (steering system)ABSTRACTSteering System Design of a car has a significant impact of driving performance, steering stability. In the car design process, first through the steering force calculations and the UG kinetic analysis we determine the ratio of steering system, the relationship between the wheel angle input and output; The principles of spatial mechanism kinetics and a related optimization program by using Matlab are applied to the calculation of the spatial motion of the ackerman steering linkage. By using the method,the interference between suspension guiding mechanism and steering linkage is minimized; then UG kinetic analysis is used to analysis the motion of steering system when turning and calculating the corresponding relation between the turning angle of inside and outside wheels, the transmission angle of steering linkage and steering box or steering linkage and track-rod, and steering box stroke. And it provides a theoretical basis for designing and optimizing the steering trapezoidal mechanism.After the work we calculate the ball joints tie rod strength and wear resistance, and some calculations was made on some dangerous bars, to ensure the car has enough strength and life. After carrying out a complete calculation of the portability, we calculate the torque of the wheel, the force of steering wheel on the hands and the total number of turns , to meet the requirements in the car rules. Finally, we set up pre-assembled three-dimensional model data, checking the steering we designed whether there is interference phenomena and to examine whether our steering meet our design requirements, to improve our design.KEY WORDS:FSAE,UG, steering trapezoid, motion analysis, rack and pinion目录第一章绪论 (1)§1.1 Formula SAE 概述 (1)§1.1.1 背景 (1)§1.1.2 发展和现状 (2)§1.2 中国FSAE发展概况 (2)§1.3 任务和目标 (3)第二章转向系设计方案分析 (4)§2.1 赛车转向系概述 (4)§2.2 转向系的基本构成 (4)§2.3 转向操纵机构 (4)§2.4 转向传动机构 (6)§2.5 机械式转向器方案分析 (6)§2.5.1 齿轮齿条式转向器 (6)§2.5.2 其他形式的转向器 (8)§2.5.3 转向器形式的选择 (9)§2.6 赛车转向系统传动比分析 (9)§2.7 转向梯形机构的分析与选择 (10)§2.7.1 转向梯形机构的选择 (10)§2.7.2 断开式转向梯形参数的确定 (10)§2.7.3 转向系内外轮转角的关系的确定 (12)§2.7.4 MATLAB内外轮转角关系曲线部分程序 (14)第三章转向系主要性能参数 (16)§3.1 转向器的效率 (16)§3.1.1 转向器的正效率η+ (16)§3.1.2 转向器的逆效率η- (17)§3.2 传动比的变化特性 (17)§3.2.1 转向系传动比 (17)§3.2.2 力传动比与转向系角传动比的关系 (18)§3.2.3 转向系的角传动比wo i (19)§3.2.4 转向器角传动比及其变化规律 (19)§3.3 转向器传动副的传动间隙Δt (20)§3.3.1 转向器传动间隙特性 (20)§3.3.2如何获得传动间隙特性 (21)§3.4 转向系传动比的确定 (22)第四章齿轮齿条式转向器设计与计算 (23)§4.1 转向系计算载荷的确定 (23)§4.1.1 原地转向阻力矩MR的计算 (23)§4.1.2 作用在转向盘上的手力Fh (23)§4.1.3转向横拉杆直径的确定 (24)§4.1.4初步估算主动齿轮轴的直径 (24)§4.2 齿轮齿条式转向器的设计 (25)§4.2.1 齿条的设计 (25)§4.2.2 齿轮的设计 (25)§4.2.3 转向横拉杆及其端部的设计 (25)§4.2.4齿条调整 (26)§4.2.5转向传动比 (27)§4.3 齿轮轴和齿条的设计计算 (28)§4.3.1 选择齿轮材料、热处理方式及计算许用应力 (28)§4.3.2 初步确定齿轮的基本参数和主要尺寸 (29)§4.3.3确定齿轮传动主要参数和几何尺寸 (30)§4.4 齿轮齿条转向器转向横拉杆的需要全套设计请联系Q Q1537693694运动分析 (31)§4.5 齿轮齿条传动受力分析 (32)§4.6 齿轮轴的强度校核 (32)§4.6.1轴的受力分析 (32)§4.6.2判断危险剖面 (33)§4.6.3轴的弯扭合成强度校核 (33)§4.6.4轴的疲劳强度安全系数校核 (33)第五章转向梯形的优化设计 (36)§5.1 目标函数的建立 (36)§5.2 设计变量与约束条件 (37)§5.2.1 保证梯形臂不与车轮上的零部件发生干涉 (37)§5.2.2保证有足够的齿条行程来实现要求的最大转角 (38)§5.2.3保证有足够大的传动角α (38)第六章基于UG运动仿真的转向梯形设计与优化 (41)§6.1 建立UG三维模型 (41)§6.2 基于UG工程图模块的转向机动图 (42)§6.3 UG模型以及基于UG高级仿真的零部件校核 (42)§6.4 UG装配模型检查干涉问题 (43)第七章结论 (44)参考文献 (45)致谢 (46)第一章绪论§1.1 Formula SAE 概述§1.1.1 背景Formula SAE 赛事由美国汽车工程师协会(the Society of Automotive Engineers 简称SAE)主办。
FSAE赛车转向系统优化设计

FSAE赛车转向系统优化设计宋学前;丁华锋;景文倩;黄成;朱令磊【摘要】转向系统是FSAE赛车的重要组成部分,其设计水平直接影响赛车的操纵稳定性。
以提高转向响应的速度为目标,分析了转向系统的转向力,确定了转向系统结构参数的合理取值范围。
利用Adams软件优化设计了转向断开点的坐标,结合转向力和转向断开点的坐标,利用Matlab软件对理想阿克曼转角关系进行分析矫正,完成对转向梯形结构参数的分析优化。
仿真结果表明:利用转向断开点的最佳空间坐标,不仅可以减少轮胎上下跳动对转向系统的冲击,而且可以减少前束角大小和轮胎磨损,保证了转向系统良好的操作性能和高速过弯性能。
【期刊名称】《重庆理工大学学报》【年(卷),期】2019(033)002【总页数】7页(P38-44)【关键词】FSAE赛车;转向梯形;转向断开点;转向力【作者】宋学前;丁华锋;景文倩;黄成;朱令磊【作者单位】[1]湖北文理学院纯电动汽车动力系统设计与测试湖北省重点实验室,湖北襄阳441053;[1]湖北文理学院纯电动汽车动力系统设计与测试湖北省重点实验室,湖北襄阳441053;[1]湖北文理学院纯电动汽车动力系统设计与测试湖北省重点实验室,湖北襄阳441053;[1]湖北文理学院纯电动汽车动力系统设计与测试湖北省重点实验室,湖北襄阳441053;[1]湖北文理学院纯电动汽车动力系统设计与测试湖北省重点实验室,湖北襄阳441053【正文语种】中文【中图分类】U463.46中国大学生方程式汽车大赛(简称“中国FSAE”)是一项由高等院校汽车工程或汽车相关专业在校学生组队参加的汽车设计与制造比赛。
该项比赛旨在培养学生汽车设计成本控制、团队合作等能力。
转向系统是FSAE赛车重要的组成部分,转向系统设计的好坏直接决定了赛车的操纵稳定性。
目前国内外对汽车内外转向轮转角的研究主要是满足阿克曼转向理论,没有考虑到实际转向过程中轮胎侧偏力对转向轮转角的影响。
大学生方程式赛车转向系统优化设计

目录1 绪论 (1)1.1大学生方程式大赛简介 (1)1.2 FSAE转向系统基础知识 (2)1.3 本次毕业设计的主要工作 (5)2 大学生方程式赛车转向系统设计 (6)2.1 转向系统基本参数 (6)2.2 转向器设计 (7)1)转向器角传动比i W (7)2)转向器载荷及相关尺寸计算 (8)3)齿轮设计 (10)4)齿条设计 (14)5)啮合受力分析 (15)6)齿间间隙调整机构设计 (18)7)轴承选择 (20)2.3 转向梯形优化 (20)3 基于UG的大学生方程式赛车转向系统仿真 (25)3.1 UG简介 (25)3.2 建立零件模型 (26)3.2.1 斜齿轮建模过程 (26)3.2.2 主要零件模型图 (31)4 基于ADAMS Car/Insight的大学生方程式赛车转向系统优化 (34)结论 (39)参考文献 (40)致谢 (42)1 绪论1.1 大学生方程式大赛简介大学生方程式大赛(以下简称FSAE )从1978年创办至今已有三十多年的历史。
如今,FSAE 已成为世界级赛事,在多个国家设立有分站比赛,如美国站、德国站、西班牙站等。
大赛一年一届,由各国汽车工程协会和大学生方程式大赛组委会举办,得到了许多车企和机构的大力赞助。
各大高校车队严格按照赛规,通过近一年的设计制造,最终同台竞技,争取在动力性、制动性、操控稳定性、燃油经济性等方面的优异表现。
中国大学生方程式大赛(以下简称FSC )始于2010年,已成功举办三届,不仅有吉林大学、同济大学、湖南大学、北京理工大学等名校的长期参与,还吸引来了诸如湖北汽车工业学院、西安汽车科技学院、广西工学院麓山学院等院校的积极加入,得到了北京汽车、广州汽车、奇瑞汽车等知名车企的极力支持。
大赛的宗旨是:由各大学车队的本科生和研究生构想、设计、制造一辆小型方程式赛车并参加比赛。
比赛本身给了参赛车队一个同各地大学的车队同场竞技的机会,以展示和证明他们的创造力和工程技术水平。
大学生方程式赛车转向节设计与优化

0引言大学生方程式赛车比赛由国际汽车工程师协会于1979年举办,面向在校本科生或研究生举办的一项学生方程式赛车比赛[1]。
该赛事针对提升大学生研发创新能力而开办,对学生知识运用、团队协作以及人际交流方面的能力都有极大的提升。
转向节是悬架系统的重要组成部分,是赛车底盘所有零部件中受力最复杂、工况最恶劣的零部件之一。
在实际行驶工况中,它不光要承受整车重量,还要承受赛车工况当中的路面冲击、制动力矩和转向力矩等载荷。
复杂和严苛的受力条件对其刚强度提出了较大考验,且由于转向节属于簧下质量,其轻量化对提高赛车操纵稳定性有重要影响[2]。
因此,转向节的合理设计与优化对于提高赛车性能,满足刚强度和轻量化要求有重要意义。
1转向节结构设计转向节作为连接悬架上下摆臂、制动卡钳和转向横拉杆的关键零部件,其结构设计需要满足赛车四轮定位参数、悬架结构形式、制动卡钳和转向横拉杆安装位置等诸多因素的要求。
本文研究的赛车悬架形式为不等长双横臂式独立悬架。
利用车辆动力学仿真软件ADAMS 对赛车悬架系统K&C 特性进行仿真调教和优化[3,4],得到最优悬架硬点组合下的主销内倾角为7°,主销后倾角为3.6°。
确定转向横拉杆和制动卡钳安装位置后,建立转向节的三维模型如图1所示,其质量为712g 。
2转向节强度校核当赛车在进行高速过弯测试时,若速度过大将导致赛车冲出赛道,由于赛道外的路面不平整,因此会带来冲击载荷。
同时,车手将踩下制动踏板,因此会产生制动力。
这种包含冲击、制动和侧倾的极限工况对转向节强度提出了巨大考验。
为了保证转向节在任何情况下都有足够的强度,认为制动减速度和侧向加速度都达到最大值。
赛车轮胎能提供的最大制动减速度为1.4g ,车身结构能提供的最大侧向加速度为1.7g 。
由此计算得到转向节受到垂直地面的冲击载荷为3900N ,刹车座受力为2100N ,转向节臂受力为1500N [5]。
在该受力条件下,利用有限元技术计算得到转向节最大应力为395MPa (图2)。
巴哈赛车转向系统设计
AUTOMOBILE DESIGN | 汽车设计巴哈赛车转向系统设计胡延明 王健儿 贾琼黄河交通学院 河南省焦作市 454950摘 要: 大学生巴哈比赛是一项由汽车工程学会主办以大学生群体为主的赛车竞赛。
要求在规定时间内每支车队独立制造出一辆具有良好的加速性能、四轮能同时抱死、操控性能足够稳定等特点以成功通过赛事里的每一项比赛的赛车。
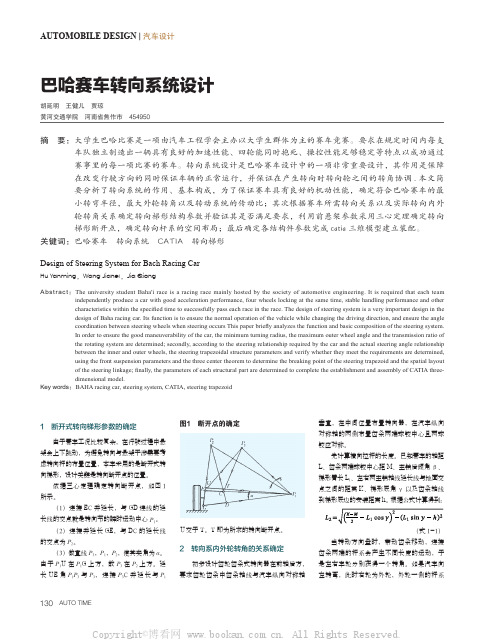
转向系统设计是巴哈赛车设计中的一项非常重要设计,其作用是保障在改变行驶方向的同时保证车辆的正常运行,并保证在产生转向时转向轮之间的转角协调.本文简要分析了转向系统的作用、基本构成,为了保证赛车具有良好的机动性能,确定符合巴哈赛车的最小转弯半径,最大外轮转角以及转动系统的传动比;其次根据赛车所需转向关系以及实际转向内外轮转角关系确定转向梯形结构参数并验证其是否满足要求,利用前悬架参数采用三心定理确定转向梯形断开点,确定转向杆系的空间布局;最后确定各结构件参数完成catia三维模型建立装配。
关键词:巴哈赛车 转向系统 CATIA 转向梯形1 断开式转向梯形参数的确定由于赛车工况比较复杂,在行驶过程中悬架会上下跳动,为避免转向与悬架干涉需要考虑转向杆的布置位置,本车采用的是断开式转向梯形,设计关键是转向断开点的位置。
依据三心定理确定转向断开点,如图1所示。
(1)连接EC并延长,与GD连线的延长线的交点就是转向节的瞬时运动中心P1。
(2)连接并延长GE,与DC的延长线的交点为P2。
(3)做直线P3,P1,P2,使其夹角为α。
由于P1U在P1G上方,故P3在P2上方。
延长UE角P1P3与P3,连接P3C并延长与P1U交于T。
T即为所求的转向断开点。
2 转向系内外轮转角的关系确定初步设计齿轮齿条式转向器在前轴后方,要求齿轮齿条中齿条轴线与汽车纵向对称轴垂直,在中间位置布置转向器,在汽车纵向对称轴的两侧布置齿条两端球铰中心且两球铰应对称。
先计算横向拉杆的长度。
已知赛车的轴距L、齿条两端球铰中心距M、主销后倾角β、梯形臂长L1、左右两主销轴线延长线与地面交点之间的距离K、梯形底角γ以及齿条轴线到梯形底边的安装距离h。
赛车转向系统的设计方案
赛车转向系统的设计方案李宏曰转向系统的主要任务是:1.设计合适的断开点以使悬架跳动对转向的影响尽可能小。
2. 设计合适的转向梯形以使内外转角尽可能符合理论阿克曼曲线。
设计过程如下:1. 确定转向机的布置形式前置,下置,断开式梯形前置。
2. 转向系角传动比的确定由最小转弯半径确定了最大外轮转角,根据最大外轮转角与方向盘转角的关系初步确定转向系角传动比为4:1,转向系角传动比为转向器传动比与转向机构传动比的乘积,转向传动机构角传动比,除用iw ' =d 3 p/d 3 k表示以外,还可以近似地用转向节臂臂长L2与摇臂臂长LI之比来表示,即iw ' =d 3 p/d3 ki疋L2 / LI o现代汽车结构中,L2与L1的比值大约在0. 85〜1. 1之间,取比值为1,则转向器角传动比为4: 1.3. 由转向器角传动比初步确定转向节臂L1的值。
齿轮齿条装置把方向盘的转动转换成横拉杆内球头的直线运动。
计算传动比时需用到齿条的c-factor和转向节臂长度(外球头到主销轴的距离)。
C-factor=齿条行程(in.)/小齿轮转过360°一般的齿条有"1-7/8-in ch齿条”或者"2-i nch齿条” ;c-factor这个尺寸是方向盘转一圈的齿条行程。
一旦齿条的c-factor知道,转向传动比可近似用下式计算:i=arcsi n(c-factor/L)/360L—转向节臂长度本式中长度单位为英寸,角度单位为度。
系统中的压力角越小这个近似值越接近,也就是说在俯视图中横拉杆几乎要与转向节臂垂直。
如果角度比较大的话,那拉杆的布置也会影响传动比。
C-factor 取70, i 为4,计算得L 为76.67mm。
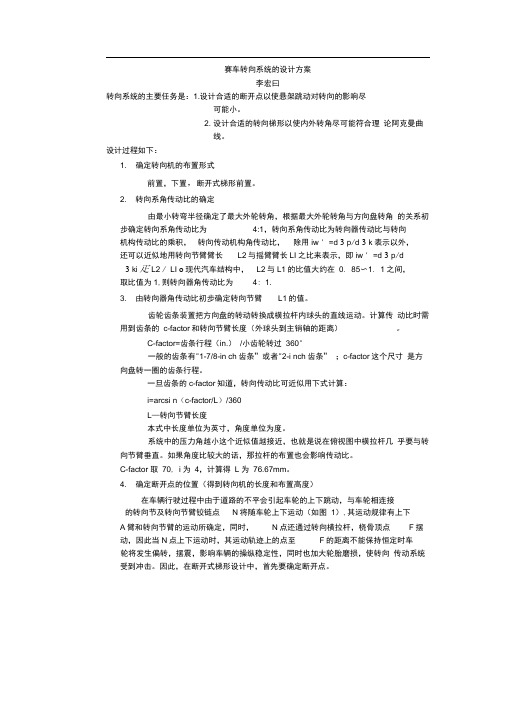
4. 确定断开点的位置(得到转向机的长度和布置高度)在车辆行驶过程中由于道路的不平会引起车轮的上下跳动,与车轮相连接的转向节及转向节臂铰链点N将随车轮上下运动(如图1),其运动规律有上下A臂和转向节臂的运动所确定,同时,N点还通过转向横拉杆,桡骨顶点F摆动,因此当N点上下运动时,其运动轨迹上的点至F的距离不能保持恒定时车轮将发生偏转,摆震,影响车辆的操纵稳定性,同时也加大轮胎磨损,使转向传动系统受到冲击。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
毕业设计(论文)题目大学生方程式赛车设计(转向器设计)2013年 5 月30 日方程式赛车转向系统设计(转向系统)摘要赛车转向系的设计对赛车转向行驶性能、操纵稳定性等性能都有较大影响。
在赛车转向系设计过程中首先通过转向系统受力计算和UG草图功能进行运动分析,确定转向系的传动比,确定了方向盘转角输入与轮胎转角输出之间的角传动比为3.67;运用空间机构运动学的原理,采用Matlab软件编制转向梯形断开点的通用优化计算程序,确定汽车转向梯形断开点的最佳位置,从而将悬架导向机构与转向杆系的运动干涉减至最小;然后采用UG运动分析的方法,分析转向系在转向时的运动,求解内外轮转角、拉杆与转向器及转向节臂的传动角、转向器的行程的对应关系,为转向梯形设计及优化提供数据依据。
完成结构设计与优化后我们对转向纵拉杆与横拉杆计算球铰的强度与耐磨性校核以及对一些易断的杆件进行了校核计算,确保赛车有足够的强度与寿命。
完成了对转向轻便性的计算,我们计算了转向轮的转向力矩M,转以及转向盘回转总圈数n,以确认是否达到赛车规则中转向盘上作用力p手所规定的要求以及转向的灵活性与轻便性。
最后我们建立三维模型数据进行预装配,在软件上检查我们设计的转向系是否存在干涉等现象以及检查我们的转向系是否满足我们的设计要求,对我们的设计进行改进。
关键词:赛车,转向,UG,转向梯形,运动分析,齿轮齿条The design of Formula front and rear suspension andsteering system (steering system)ABSTRACTSteering System Design of a car has a significant impact of driving performance, steering stability. In the car design process, first through the steering force calculations and the UG kinetic analysis we determine the ratio of steering system, the relationship between the wheel angle input and output; The principles of spatial mechanism kinetics and a related optimization program by using Matlab are applied to the calculation of the spatial motion of the ackerman steering linkage. By using the method,the interference between suspension guiding mechanism and steering linkage is minimized; then UG kinetic analysis is used to analysis the motion of steering system when turning and calculating the corresponding relation between the turning angle of inside and outside wheels, the transmission angle of steering linkage and steering box or steering linkage and track-rod, and steering box stroke. And it provides a theoretical basis for designing and optimizing the steering trapezoidal mechanism.After the work we calculate the ball joints tie rod strength and wear resistance, and some calculations was made on some dangerous bars, to ensure the car has enough strength and life. After carrying out a complete calculation of the portability, we calculate the torque of the wheel, the force of steering wheel on the hands and the total number of turns , to meet the requirements in the car rules. Finally, we set up pre-assembled three-dimensional model data, checking the steering we designed whether there is interference phenomena and to examine whether our steering meet our design requirements, to improve our design.KEY WORDS:FSAE,UG, steering trapezoid, motion analysis, rack and pinion目录第一章绪论 (1)§1.1 Formula SAE 概述 (1)§1.1.1 背景 (1)§1.1.2 发展和现状 (2)§1.2 中国FSAE发展概况 (2)§1.3 任务和目标 (3)第二章转向系设计方案分析 (4)§2.1 赛车转向系概述 (4)§2.2 转向系的基本构成 (4)§2.3 转向操纵机构 (4)§2.4 转向传动机构 (6)§2.5 机械式转向器方案分析 (6)§2.5.1 齿轮齿条式转向器 (6)§2.5.2 其他形式的转向器 (8)§2.5.3 转向器形式的选择 (9)§2.6 赛车转向系统传动比分析 (9)§2.7 转向梯形机构的分析与选择 (10)§2.7.1 转向梯形机构的选择 (10)§2.7.2 断开式转向梯形参数的确定 (10)§2.7.3 转向系内外轮转角的关系的确定 (12)§2.7.4 MATLAB内外轮转角关系曲线部分程序 (14)第三章转向系主要性能参数 (16)§3.1 转向器的效率 (16)§3.1.1 转向器的正效率η+ (16)§3.1.2 转向器的逆效率η- (17)§3.2 传动比的变化特性 (17)§3.2.1 转向系传动比 (17)§3.2.2 力传动比与转向系角传动比的关系 (18)§3.2.3 转向系的角传动比wo i (19)§3.2.4 转向器角传动比及其变化规律 (19)§3.3 转向器传动副的传动间隙Δt (20)§3.3.1 转向器传动间隙特性 (20)§3.3.2如何获得传动间隙特性 (21)§3.4 转向系传动比的确定 (22)第四章齿轮齿条式转向器设计与计算 (23)§4.1 转向系计算载荷的确定 (23)§4.1.1 原地转向阻力矩MR的计算 (23)§4.1.2 作用在转向盘上的手力Fh (23)§4.1.3转向横拉杆直径的确定 (24)§4.1.4初步估算主动齿轮轴的直径 (24)§4.2 齿轮齿条式转向器的设计 (25)§4.2.1 齿条的设计 (25)§4.2.2 齿轮的设计 (25)§4.2.3 转向横拉杆及其端部的设计 (25)§4.2.4齿条调整 (26)§4.2.5转向传动比 (27)§4.3 齿轮轴和齿条的设计计算 (28)§4.3.1 选择齿轮材料、热处理方式及计算许用应力 (28)§4.3.2 初步确定齿轮的基本参数和主要尺寸 (29)§4.3.3确定齿轮传动主要参数和几何尺寸 (30)§4.4 齿轮齿条转向器转向横拉杆的需要全套设计请联系Q Q1537693694运动分析 (31)§4.5 齿轮齿条传动受力分析 (32)§4.6 齿轮轴的强度校核 (32)§4.6.1轴的受力分析 (32)§4.6.2判断危险剖面 (33)§4.6.3轴的弯扭合成强度校核 (33)§4.6.4轴的疲劳强度安全系数校核 (33)第五章转向梯形的优化设计 (36)§5.1 目标函数的建立 (36)§5.2 设计变量与约束条件 (37)§5.2.1 保证梯形臂不与车轮上的零部件发生干涉 (37)§5.2.2保证有足够的齿条行程来实现要求的最大转角 (38)§5.2.3保证有足够大的传动角α (38)第六章基于UG运动仿真的转向梯形设计与优化 (41)§6.1 建立UG三维模型 (41)§6.2 基于UG工程图模块的转向机动图 (42)§6.3 UG模型以及基于UG高级仿真的零部件校核 (42)§6.4 UG装配模型检查干涉问题 (43)第七章结论 (44)参考文献 (45)致谢 (46)第一章绪论§1.1 Formula SAE 概述§1.1.1 背景Formula SAE 赛事由美国汽车工程师协会(the Society of Automotive Engineers 简称SAE)主办。
SAE 是一个拥有超过60000 名会员的世界性的工程协会,致力与海、陆、空各类交通工具的发展进步。
Formula SAE 是一项面对美国汽车工程师学会学生会员组队参与的国际赛事,于1980 年在美国举办了第一届赛事。
比赛的目的是设计、制造一辆小型的高性能赛车。
目前美国、欧洲和澳大利亚每年都会定期举办该项赛事。