基于低通滤波的高机动视频目标跟踪
基于自适应卡尔曼滤波的多目标跟踪算法

基于自适应卡尔曼滤波的多目标跟踪算法
王广玉;窦磊;窦杰
【期刊名称】《计算机应用》
【年(卷),期】2022(42)S01
【摘要】在视频的多目标跟踪任务中,卡尔曼滤波器性能受硬件噪声以及光线等环境噪声干扰较大,导致滤波性能下降甚至发散,严重影响目标跟踪精度。
针对这一问题,在检测端不变的情况下,对跟踪算法中的卡尔曼滤波器进行改进。
首先,通过实时监测跟踪过程中滤波器观测值和估计值的动态变化,提取新息或残差;然后,利用新息协方差对观测噪声统计特性进行自适应估计,进而调整卡尔曼滤波增益;并通过数值仿真表明所提方法能有效降低噪声,获得更好跟踪效果。
最后,基于YOLOv3算法检测结果进行实验验证,结果表明在多目标跟踪(MOT16)数据集上,相较于传统卡尔曼滤波设计,所提自适应卡尔曼滤波在多目标跟踪任务中的精度、标号(ID)相关指标(IDF1,IDP)等指标均有所提升。
【总页数】5页(P271-275)
【作者】王广玉;窦磊;窦杰
【作者单位】瞬态物理国家重点实验室(南京理工大学)
【正文语种】中文
【中图分类】TP391.14
【相关文献】
1.一种基于卡尔曼滤波器的多目标跟踪算法研究
2.基于卡尔曼滤波和多种信息融合的在线多目标跟踪算法
3.基于边缘卡尔曼滤波的GM-PHD多目标被动跟踪算法
4.基于YOLOv3与卡尔曼滤波的多目标跟踪算法
5.基于自适应卡尔曼滤波的Meanshift跟踪算法
因版权原因,仅展示原文概要,查看原文内容请购买。
一种基于模板匹配的运动目标跟踪方法
一种基于模板匹配的运动目标跟踪方法党晓军;尹俊文【摘要】为了提高运动目标跟踪算法在复杂场景下的稳定性,提出了一种将小波变换与模扳匹配相融合的跟踪方法.它首先对图像序列采用滤波器组实现运动目标分割,再通过对图像序列小波变换以确定目标匹配子图像,最终使用模板匹配求取最佳匹配点来实现实时跟踪.采用MATLAB仿真实验,对标准视频序列coastguard_cif 实验测试结果表明,提出的方法具有良好的跟踪性能.【期刊名称】《计算机工程与应用》【年(卷),期】2010(046)005【总页数】4页(P173-176)【关键词】运动目标跟踪;小波变换;模板匹配【作者】党晓军;尹俊文【作者单位】国防科技大学,计算机学院,长沙,410073;国防科技大学,计算机学院,长沙,410073【正文语种】中文【中图分类】TP3911 引言智能视频监控的核心是运动目标的检测与跟踪方法。
评价目标跟踪系统的优劣在于实时性与准确性两个指标,而检测与跟踪复杂场景下的运动目标,是运动目标跟踪中的主要难点。
目标的检测与跟踪是针对一个图像序列进行分析,力图从复杂背景中检测出运动目标,并且对目标运动规律加以预测,实现对指定目标进行准确而快速跟踪。
目前常用的序列图像目标检测方法主要包括基于像素分析方法、特征检测方法与基于变换的方法[1]。
基于像素分析方法有帧间差分法,光流法与贝叶斯算法等,该方法虽然实现方法简单,但存在计算量大、效率低等缺点。
基于变换的时频分析方法可实现多分辨率分析存在检测效率低的缺点,基于特征检测方法则在选择特征空间向量上难度较大。
目前目标跟踪方法包括基于运动分析方法与基于图像匹配方法两大类。
基于运动分析方法具有运算速度快,易于硬件实现的优势,但在复杂背景中易出现跟踪脱离目标,稳定性较差现象。
而基于图像匹配方法处理目标平移运动性能较好,且对图像噪声处理比较理想,跟踪结果与光照、图像之间旋转尺寸变化无关,但对复杂背景下目标遮挡处理不好[2]。
(完整版)视频目标检测与跟踪算法综述

视频目标检测与跟踪算法综述1、引言运动目标的检测与跟踪是机器视觉领域的核心课题之一,目前被广泛应用在 视频编码、智能交通、监控、图像检测等众多领域中。
本文针对视频监控图像的运动目标检测与跟踪方法,分析了近些年来国内外的研究工作及最新进展。
2、视频监控图像的运动目标检测方法运动目标检测的目的是把运动目标从背景图像中分割出来。
运动目标的有效分割对于目标分类、跟踪和行为理解等后期处理非常重要。
目前运动目标检测算法的难点主要体现在背景的复杂性和目标的复杂性两方面。
背景的复杂性主要体现在背景中一些噪声对目标的干扰,目标的复杂性主要体现在目标的运动性、突变性以及所提取目标的非单一性等等。
所有这些特点使得运动目标的检测成为一项相当困难的事情。
目前常用的运动目标检测算法主要有光流法、帧差法、背景相减法,其中背景减除法是目前最常用的方法。
2.1 帧差法帧差法主要是利用视频序列中连续两帧间的变化来检测静态场景下的运动目标,假设(,)k f x y 和(1)(,)k f x y +分别为图像序列中的第k 帧和第k+1帧中象素点(x ,y)的象素值,则这两帧图像的差值图像就如公式2-1 所示:1(1)(,)(,)k k k Diff f x y f x y ++=- (2-1)2-1式中差值不为0的图像区域代表了由运动目标的运动所经过的区域(背景象素值不变),又因为相邻视频帧间时间间隔很小,目标位置变化也很小,所以运动目标的运动所经过的区域也就代表了当前帧中运动目标所在的区域。
利用此原理便可以提取出目标。
下图给出了帧差法的基本流程:1、首先利用2-1 式得到第k 帧和第k+1帧的差值图像1k Diff +;2、对所得到的差值图像1k Diff +二值化(如式子2-2 示)得到Qk+1;3、为消除微小噪声的干扰,使得到的运动目标更准确,对1k Q +进行必要的滤波和去噪处理,后处理结果为1k M +。
111255,,(,)0,,(,)k k k if Diff x y T Q if Diff x y T+++>⎧=⎨≤⎩ (T 为阈值) (2-2)帧差流程图从结果看在简单背景下帧差法基本可检测到运动目标所在的位置,而且计算简单,复杂度低。
基于深度学习的视频目标识别与跟踪
基于深度学习的视频目标识别与跟踪视频目标识别与跟踪是一项基于深度学习的前沿技术,它的应用广泛,包括视频监控、自动驾驶、人机交互等领域。
本文将详细介绍基于深度学习的视频目标识别与跟踪的原理、方法及其在各个领域的应用。
首先,我们先来了解一下视频目标识别与跟踪的概念。
视频目标识别是指在视频中自动识别和定位特定目标的过程,而目标跟踪则是在视频序列中,在帧与帧之间追踪目标的过程。
这两个任务通常是相互关联的,目标跟踪需要先进行目标识别,然后才能进行跟踪。
目前,深度学习在视频目标识别与跟踪任务中取得了巨大的突破。
深度学习通过使用多层神经网络,可以从原始数据中自动学习高层次的特征表示,从而提高目标识别与跟踪的准确性和鲁棒性。
下面我们将重点介绍基于深度学习的视频目标识别与跟踪的方法和技术。
对于视频目标识别任务,常用的深度学习方法包括卷积神经网络(Convolutional Neural Network,简称CNN)和循环神经网络(Recurrent Neural Network,简称RNN)。
CNN可以提取图像的空间特征,通过多次卷积和池化操作可以提取出目标的形状、纹理等特征;RNN则可以利用其记忆性,对时间序列数据进行建模,从而克服目标在不同帧之间的变化。
当前,许多先进的视频目标识别模型如YOLO、Faster R-CNN、SSD等都基于深度学习框架构建,这些模型在目标识别精度和速度上有着较大的改进。
对于视频目标跟踪任务,常用的深度学习方法包括基于卷积神经网络的目标跟踪器和基于循环神经网络的目标跟踪器。
基于卷积神经网络的目标跟踪器通过在两个帧之间匹配特征来实现目标的跟踪,例如Siamese网络、DaSiamRPN等;基于循环神经网络的目标跟踪器则通过对目标在时间序列上进行建模,从而进行目标跟踪,例如LSTM-based目标跟踪器。
这些跟踪器通过不断学习和更新模型,能够在复杂的背景和目标变化的情况下实现准确的跟踪。
高速运动目标的跟踪算法研究

高速运动目标的跟踪算法研究导语:随着科技的不断发展,各行各业都在不断地寻求创新和进步。
在安全监控领域,高速运动目标跟踪技术已经成为了不可或缺的一部分,因此如何研究和应用高速运动目标的跟踪算法成为了一个热门话题。
本文将从算法研究的角度探讨这个话题。
一、算法概述高速运动物体跟踪算法是指通过一系列计算机视觉和图像处理算法来对运动速度较快、变化较大的物体进行追踪和预测的技术。
主要应用于交通、安防等领域,可以对路面行驶的汽车、飞驰的摩托车、奔跑的人等高速运动目标进行实时跟踪,从而帮助安全监控人员进行快速有效的应对。
二、研究现状目前,国内外有很多关于高速运动物体跟踪算法的研究。
其中常见的算法包括以下几种:1. 匹配滤波算法:该算法利用模板匹配的方法对物体进行跟踪。
该方法虽然精确度高,但受到受干扰光照等因素的影响较大。
2. 卡尔曼滤波算法:该算法利用运动学模型来预测物体的位置和速度,从而对物体进行跟踪。
该方法适用于小尺度、低速运动物体的跟踪,但对于高速运动目标的跟踪效果并不好。
3. 光流算法:该算法基于图像亮度的变化,通过计算每个像素在两个相邻图像间的位置关系来实现物体跟踪。
该方法精确度较高,但对高速移动的物体跟踪效果较差。
通过对以上算法的研究,我们发现目前尚没有一种完全适用于高速运动目标跟踪的算法。
因此,在这个领域的研究中,需要不断地探究和发现更加适用于高速运动目标的跟踪算法。
三、创新思路1. 基于深度学习的算法:目前深度学习技术在计算机视觉领域得到了广泛的应用,通过卷积神经网络和循环神经网络等技术,可以对高速运动目标进行更为准确的跟踪和识别。
2. 基于多模态融合的算法:多模态融合是指利用多种传感器来采集目标的位置、速度、方向等信息,并将这些信息综合起来,从而提高物体跟踪的精度。
3. 基于自适应滤波的算法:自适应滤波基于物体运动模型和噪声分布模型,可以将物体运动轨迹的不确定性进行有效地估计和处理,从而提高物体跟踪的精度。
视频图像中的目标检测与跟踪技术研究

视频图像中的目标检测与跟踪技术研究近年来,随着计算机视觉和机器学习技术的迅速发展,视频图像中的目标检测与跟踪技术得到了广泛关注和研究。
目标检测与跟踪技术是计算机视觉领域的热点研究方向之一,它对于实现自动驾驶、智能监控、行人识别等应用具有重要意义。
本文将对视频图像中的目标检测与跟踪技术进行研究,探讨其基本原理、常用方法以及面临的挑战。
目标检测是指在图像或视频中准确地识别和定位感兴趣的目标。
针对图像中的目标检测,常用的方法包括基于深度学习的目标检测和传统机器学习的目标检测。
基于深度学习的目标检测算法,如Faster R-CNN、YOLO和SSD等,通过优化网络结构和特征提取算法,实现了高准确率和实时性能的平衡。
传统机器学习的目标检测算法,如Haar特征级联分类器、HOG+SVM和基于颜色直方图的方法,虽然在效果上可能不及深度学习的方法,但在一些资源受限的场景下仍具有一定的应用价值。
然而,仅仅完成目标检测还无法满足实际需求,因为目标通常都是在视频中运动的。
因此,目标的轨迹跟踪成为了视频图像处理中的另一个重要问题。
目标跟踪需要在视频序列中,通过连续观察目标在连续帧之间所发生的变化,精确定位目标的位置。
常见的目标跟踪方法包括基于颜色特征、基于纹理特征和基于深度学习的方法。
其中,基于深度学习的目标跟踪算法由于其出色的性能和强大的迁移能力,受到了广泛的关注。
目标检测与跟踪技术在实际应用中仍面临着一些挑战。
首先,目标检测与跟踪算法需要具备较强的鲁棒性,对光照变化、遮挡、运动模糊等因素具有一定的适应性。
其次,目标检测与跟踪算法需要具备较高的实时性能,能够在处理大规模视频数据的同时做到快速准确地定位和跟踪目标。
此外,目标检测与跟踪算法还需要具备较强的稳定性,能够处理视频中复杂的背景和多目标的情况。
这些挑战都需要进一步的研究和优化,以提升目标检测与跟踪技术在实际应用中的性能。
总之,视频图像中的目标检测与跟踪技术是计算机视觉领域的重要研究方向。
视频目标跟踪技术的研究及应用
视频目标跟踪技术的研究及应用随着科技的不断发展,视频目标跟踪技术已经被广泛应用于安防、智能交通、医疗等领域。
本篇文章将从技术原理、优缺点分析、应用场景以及未来发展等方面进行探讨。
一、技术原理首先,我们需要了解视频目标跟踪技术的基础知识。
视频目标跟踪技术是指通过计算机视觉等技术手段,对视频中的特定目标进行跟踪、定位和识别的过程。
技术实现的一般思路是首先在视频帧中通过目标检测算法检测出待跟踪的目标,然后通过跟踪算法对目标进行追踪。
其中,跟踪算法又分为基于特征和基于深度学习的两种方式。
基于特征的目标跟踪算法常用的是判别式跟踪算法,该算法利用目标的特征对目标进行跟踪,如颜色、纹理、形状等。
常见的包括KCF、TLD、MOSSE等算法。
这些算法快速、高效,能够在实时处理视频时满足实施要求,但对于目标的遮挡、快速移动等场景表现不够理想。
而基于深度学习的目标跟踪算法是近年来的新兴技术,相较于基于特征的算法具有更好的对抗目标姿态变化、光照变化、背景干扰等方面的鲁棒性。
例如,Siamese网络、SiamRPN等算法拥有高效的推理速度及较好的识别性能。
相比基于特征的算法,基于深度学习的算法所需要的计算能力和硬件设备要求比较高,因此它们常常采用GPU进行加速。
二、优缺点分析目标跟踪技术在应用中的优缺点也是需要我们考虑的。
优点:1.实时性:目标跟踪技术能够实现实时处理,能够在毫秒级别内完成对目标的跟踪,满足实时性的需求。
2.鲁棒性:基于深度学习的目标跟踪算法具有很强的鲁棒性,适用于复杂的环境中,能够应对光照变化和背景混杂等复杂问题。
3.可扩展性:针对不同场景的跟踪需求,目标跟踪技术应用灵活多样,可根据需求进行定制。
缺点:1.精度:针对一些目标需要进行精确定位的场景,目标跟踪技术的精度相对于检测技术仍有提升空间。
2.计算量:基于深度学习的目标跟踪算法所需要的计算量相较于基于特征的算法更高,因此需要较高的计算资源。
3.可靠性:在目标跟踪过程中,一些干扰项如背景混杂等因素会影响目标跟踪的可靠性,因此需要综合考虑处理复杂环境的能力。
视频图像处理中的运动目标跟踪技术研究
视频图像处理中的运动目标跟踪技术研究在视频图像处理领域,运动目标跟踪技术是一项核心任务,其旨在准确地识别和跟踪视频中的移动目标。
这项技术在许多领域中都具有广泛的应用,如视频监控、智能交通系统、机器人导航等。
运动目标跟踪技术的研究涉及到多个关键问题,其中包括目标检测、目标跟踪算法以及跟踪的稳定性等。
目标检测是首先需要解决的问题,其目的是将图像中的目标从背景中准确地提取出来。
常见的目标检测方法包括基于颜色、形状和纹理等特征的算法,如背景差分法、基于连通区域的方法等。
目标检测得到目标的位置信息后,接下来需要进行目标跟踪。
目标跟踪的任务是在视频序列中对目标进行连续跟踪,确保目标的位置和形状随时间的变化而变化。
目标跟踪算法需要解决目标遮挡、目标形变、背景干扰等问题。
常见的目标跟踪算法包括基于特征匹配的方法、基于模型的方法和基于深度学习的方法。
在目标跟踪的过程中,保持跟踪的稳定性是非常重要的。
即使在目标遮挡或背景变化的情况下,算法也应能够准确地跟踪目标。
为了提高稳定性,研究人员提出了一系列改进算法,如卡尔曼滤波、粒子滤波、多模型跟踪等。
除了传统的图像处理方法,近年来深度学习技术也在运动目标跟踪中得到了广泛的应用。
深度学习算法能够自动提取图像中的特征,并利用这些特征进行目标的检测和跟踪。
深度学习方法的优势在于其强大的特征提取能力和对复杂场景的适应性。
然而,运动目标跟踪技术仍然面临着一些挑战和问题。
首先,目标遮挡和背景干扰等复杂场景的处理仍然是难点。
其次,跟踪算法的实时性和准确性也是需要优化的方向。
此外,不同的视频应用领域对于跟踪算法的需求也不同,因此需要根据实际应用场景进行算法的优化和调整。
总体而言,视频图像处理中的运动目标跟踪技术是一个复杂且关键的研究领域。
随着图像处理技术和深度学习技术的进步,运动目标跟踪算法的准确性和实时性将不断提高,为各种视频应用场景提供更好的支持。
同时,跟踪算法仍然存在一定的局限性,需要进一步的研究和发展来解决实际问题。
目标跟踪判断行驶的方法

目标跟踪判断行驶的方法
目标跟踪是指在图像或视频中识别并跟踪特定目标物体的过程。
下面是一些常用的方法来判断目标的行驶方向:
1. 光流法(Optical Flow):通过计算连续帧之间的像素位移
来估计目标的运动方向和速度。
光流法对于目标运动速度较慢的情况较为有效,但在目标快速运动或光照变化剧烈的情况下效果可能不佳。
2. 模板匹配法(Template Matching):使用目标的模板图像与
当前帧中的局部图像进行匹配,通过比较相似度来判断目标的位置和运动方向。
模板匹配法简单直观,但对于目标在图像中的尺度、位姿等变化敏感。
3. 卡尔曼滤波(Kalman Filter):卡尔曼滤波结合了预测和观测,通过对目标的运动模型和观测模型进行建模,实时地估计目标的状态和位置。
卡尔曼滤波可以适应目标运动的变化,并且对于运动噪声和测量误差具有一定的鲁棒性。
4. 运动分析法(Motion Analysis):通过对连续帧之间的差异
进行分析,如帧差法、背景减除法等,可以提取出目标的运动轨迹。
运动分析法可以适应目标在复杂背景下的运动,但也容易受到背景噪声和非目标的干扰。
5. 深度学习方法:近年来,深度学习方法在目标跟踪领域取得了显著的进展。
通过使用深度神经网络来提取特征,并使用循环神经网络(RNN)或卷积神经网络(CNN)等进行目标跟
踪。
深度学习方法可以适应目标的复杂运动和变形。
综上所述,根据具体的应用场景和需求,可以选择不同的方法来判断目标的行驶方向。
基于信号处理的目标跟踪算法优化
基于信号处理的目标跟踪算法优化在当今科技迅速发展的时代,目标跟踪技术在众多领域发挥着至关重要的作用,如军事侦察、智能监控、自动驾驶等。
而基于信号处理的目标跟踪算法作为其中的关键组成部分,其性能的优劣直接影响着整个系统的准确性和可靠性。
为了更好地满足实际应用的需求,对目标跟踪算法进行优化成为了研究的热点。
一、目标跟踪算法的基本原理目标跟踪的本质是在一系列连续的图像或信号中,准确地确定目标的位置、形状和运动轨迹。
基于信号处理的目标跟踪算法通常基于以下几个关键步骤:1、信号采集与预处理首先,通过传感器(如摄像头、雷达等)获取目标的原始信号。
这些信号可能包含大量的噪声和干扰,因此需要进行预处理,如滤波、去噪、增强等操作,以提高信号的质量。
2、特征提取从预处理后的信号中提取能够有效描述目标的特征,例如边缘、形状、纹理、颜色等。
这些特征将作为后续跟踪的依据。
3、目标模型建立根据提取的特征,建立目标的模型。
常见的模型有基于模板的模型、基于统计分布的模型等。
4、相似性度量在后续的图像或信号中,计算候选目标与建立的目标模型之间的相似性度量。
相似性度量的方法有多种,如欧氏距离、马氏距离、互相关等。
5、目标定位与跟踪根据相似性度量的结果,确定目标的位置,并通过不断更新模型和预测目标的运动轨迹,实现对目标的持续跟踪。
二、现有目标跟踪算法存在的问题尽管现有的基于信号处理的目标跟踪算法在许多应用中取得了一定的成果,但仍然存在一些亟待解决的问题。
1、复杂环境下的适应性差在实际场景中,目标可能会受到光照变化、遮挡、背景干扰等因素的影响,导致现有的算法难以准确跟踪目标。
例如,在强光照射下,目标的特征可能会发生变化,从而使特征提取和相似性度量出现偏差;在目标被部分遮挡时,算法可能会将遮挡物误认为目标,导致跟踪失败。
2、实时性要求难以满足在一些对实时性要求较高的应用中,如自动驾驶,现有的算法计算复杂度较高,处理速度较慢,无法及时给出准确的跟踪结果。
基于图像处理技术的目标跟踪系统
基于图像处理技术的目标跟踪系统摘要:本文介绍了一种基于图像处理技术的目标跟踪系统,该系统可以实时地追踪动态目标,并具有高准确性和鲁棒性。
该系统主要包括目标检测、跟踪和预测三个模块。
其中,目标检测模块主要使用卷积神经网络(CNN)进行目标识别,跟踪模块主要使用基于像素级相似度度量的核相关滤波器(KCF)算法实现目标的追踪,预测模块则通过利用卡尔曼滤波器对目标进行预测。
实验结果表明,该系统能够在动态复杂环境下实现高准确性的目标跟踪,为实际场景应用提供有力支持。
引言:目标跟踪是计算机视觉领域中的重要研究方向,其应用广泛,包括智能监控、自动驾驶、航空航天、机器人等多个领域。
目标跟踪的基本任务是在视频中实时识别并跟踪目标,而其中最具挑战性的问题之一是目标的位置和状态的变化。
传统的基于像素级相似度的跟踪方法往往难以处理目标变形、旋转、光照等影响因素,而大规模的图像深度学习方法运算复杂度高,在实时性和计算资源上存在一定瓶颈。
因此,基于图像处理技术的目标跟踪系统具有重要的研究价值。
本文提出了一种基于图像处理技术的目标跟踪系统,该系统采用卷积神经网络(CNN)进行目标检测,使用基于像素级相似度度量的核相关滤波器(KCF)算法实现目标的追踪,并采用卡尔曼滤波器进行目标预测,可以实现在复杂环境下高准确性的目标追踪。
系统框架:本文提出的目标跟踪系统主要由目标检测、跟踪和预测三个模块组成,各模块的算法流程如下:1. 目标检测模块目标检测模块主要通过使用卷积神经网络(CNN)进行目标识别。
对于CNN网络,其主要通过训练过程来获取目标识别的能力。
训练过程中,网络通过不断调整各层神经元之间的权重,使得网络能够对不同类别的目标进行准确的辨识。
在使用过程中,将测试图像送入网络中,并根据网络输出的概率值来识别目标类别。
2. 目标跟踪模块目标跟踪模块主要使用基于像素级相似度度量的核相关滤波器(KCF)算法实现目标的追踪。
该算法的特点是采用离散余弦变换(DCT)对像素级的图像块进行特征提取,进而使用核函数计算目标模板和待跟踪帧之间的相关性。
高精度雷达信号处理与目标跟踪

高精度雷达信号处理与目标跟踪概述高精度雷达信号处理与目标跟踪是一项广泛应用于军事和民用领域的技术。
这项技术的目标是通过处理雷达返回的信号来识别和跟踪目标物体,并提供高精度的测量结果。
本文将介绍高精度雷达信号处理与目标跟踪的基本原理、流程和相关算法。
1. 高精度雷达信号处理高精度雷达信号处理是指通过对雷达接收到的信号进行处理、滤波和解调等操作,以提取有关目标的相关信息。
其基本原理是根据传播时间和频率的关系来进行信号处理。
常用的信号处理方法包括脉冲压缩、多普勒频移补偿和目标检测等。
1.1 脉冲压缩脉冲压缩是一种信号处理技术,用于减小雷达发射信号的脉冲宽度,从而提高雷达的距离分辨率。
常用的压缩技术包括匹配滤波器和频率调制等方法。
其中,匹配滤波器通过与输入信号进行卷积操作,将脉冲信号收缩为较窄的脉冲,从而提高分辨率。
1.2 多普勒频移补偿多普勒频移补偿是用于处理目标在雷达观测期间产生的多普勒频移现象。
多普勒频移是由于目标相对于雷达的运动而导致雷达接收到的信号频率发生变化。
在信号处理过程中,必须将这种频移进行补偿,才能得到准确的目标信息。
常用的多普勒频移补偿方法包括低通滤波和相关处理等。
1.3 目标检测目标检测是指通过对处理后的信号进行特征提取和判决,以确定是否存在目标物体。
常用的目标检测算法包括常规判决算法、Chebyshev距离算法和匹配滤波器等。
其中,匹配滤波器通过将目标和无关目标相似性进行比较,从而进行目标检测。
2. 目标跟踪目标跟踪是指通过连续观测目标的位置信息,将其在时间和空间上进行连接,以实现目标的连续跟踪。
目标跟踪可以分为单目标跟踪和多目标跟踪两种。
常用的目标跟踪算法包括卡尔曼滤波器、粒子滤波器和相关滤波器等。
2.1 卡尔曼滤波器卡尔曼滤波器是一种线性动态系统的最优滤波器,广泛用于目标跟踪中。
它通过不断更新目标的状态估计和协方差矩阵,以实现目标的连续跟踪。
卡尔曼滤波器通过预测和更新两个步骤来实现目标位置的跟踪。
目标跟踪算法综述

目标跟踪算法综述目标跟踪算法综述目标跟踪是计算机视觉中一项重要的任务,它旨在识别并跟踪视频序列中的特定目标。
随着计算机视觉和图像处理技术的不断发展,目标跟踪算法也得到了巨大的改进和突破。
本文将综述当前常见的目标跟踪算法,包括传统的基于特征的目标跟踪算法和基于深度学习的目标跟踪算法。
一、传统的基于特征的目标跟踪算法传统的目标跟踪算法主要基于目标的外观特征进行跟踪,常用的特征包括颜色、纹理和形状等。
其中,最经典的算法是卡尔曼滤波器(Kalman Filter)算法和粒子滤波器(Particle Filter)算法。
卡尔曼滤波器是一种基于状态空间模型的滤波器,通过预测目标的位置和速度,并根据观测数据进行修正,从而实现目标的跟踪。
它的优势在于对于线性系统能够得到最优估计,并且具有较低的计算复杂度。
但是,卡尔曼滤波器对于非线性系统和非高斯噪声的处理能力较差,容易导致跟踪误差的累积。
粒子滤波器是一种基于蒙特卡洛采样的目标跟踪算法,通过生成一组粒子来表示目标的可能位置,并根据观测数据和权重对粒子进行更新和重采样。
粒子滤波器具有较好的鲁棒性和适应性,能够有效处理非线性系统和非高斯噪声。
但是,由于需要采样大量的粒子,并且对粒子进行权重更新和重采样操作,使得粒子滤波器的计算复杂度较高,难以实时应用于大规模目标跟踪。
二、基于深度学习的目标跟踪算法随着深度学习技术的飞速发展和广泛应用,基于深度学习的目标跟踪算法也取得了显著的进展。
深度学习算法通过在大规模标注数据上进行训练,能够学习到更具有区分性的特征表示,并且具有较好的泛化能力和鲁棒性。
目前,基于深度学习的目标跟踪算法主要分为两类:基于孪生网络的在线学习方法和基于卷积神经网络的离线训练方法。
基于孪生网络的在线学习方法通过将目标的当前帧与模板帧进行比较,计算相似度分数,并根据分数进行目标位置的预测和更新。
该方法具有较好的实时性和鲁棒性,但是需要大量的在线训练数据,对于目标的变化和遮挡情况较为敏感。
基于深度学习的视频目标追踪算法研究

基于深度学习的视频目标追踪算法研究一、引言视频目标追踪是计算机视觉领域的一个热门研究方向。
它的应用范围非常广泛,包括安保监控、自动驾驶、智能家居等领域。
传统的目标追踪算法通常是基于传感器数据或者运动模型,而近年来,深度学习技术的发展为视频目标追踪算法带来了新的发展机遇。
本文将综述基于深度学习的视频目标追踪算法研究进展。
二、基于深度学习的视频目标追踪算法分类基于深度学习的视频目标追踪算法可以大致分为以下几类。
1. 基于模板匹配的算法模板匹配是一种朴素的目标追踪算法,它通过在目标区域选取一个参考模板,在后续的帧中寻找最相似的区域。
基于深度学习的模板匹配算法,通常采用卷积神经网络(Convolutional Neural Network,CNN)对目标进行特征提取,然后计算相似度,从而确定最佳匹配区域。
具体来说,可以通过对目标和背景图片进行卷积运算,提取目标和背景的高层特征,然后通过比较两者的相似性来完成目标追踪。
2. 基于区域提议的算法基于区域提议的算法是目前应用最广泛的目标追踪算法之一。
该算法通过生成候选目标区域,并对这些区域进行分类,最终确定目标位置。
这种方法的优点在于对尺度变化、旋转等变换具有一定的鲁棒性。
基于深度学习的区域提议算法,通常采用区域卷积神经网络(Region-based Convolutional Neural Network,R-CNN)或者其改进版Fast R-CNN、Faster R-CNN等进行目标检测,然后将候选区域送入分类器进行分类和区分。
这种算法相对于传统的算法,在检测速度和准确率方面取得了很大的提升。
3. 基于跟踪的算法基于跟踪的算法是一种实时目标追踪算法。
它通过跟踪目标的运动轨迹,从而实现目标的连续追踪。
基于深度学习的跟踪算法,通常采用循环神经网络(Recurrent Neural Network,RNN)对目标的历史轨迹进行建模,并利用卷积神经网络对当前帧中的目标进行检测和跟踪。
低照度环境下运动目标的检测与跟踪

重庆大学硕士学位论文低照度环境下运动目标的检测与跟踪姓名:金宪刚申请学位级别:硕士专业:信号与信息处理指导教师:印勇2010-04摘要运动目标的检测和跟踪,是计算机视觉领域研究的主要内容,到目前为止,国内外对其在低照度环境下的研究还较少,然而因其在全天候实时监控、交通控制、军事等领域中存在着广泛的应用前景,该研究正逐步得到人们的重视,并成为计算机视觉领域一个新的热点研究问题。
本文是在摄像机固定的前提下,主要针对室内低照度环境下的视频序列进行研究,其内容主要包括:预处理、增强处理、运动目标的检测和跟踪。
在视频序列预处理方面,阐述了低照度环境下信噪比低的原因以及噪声的特性,介绍了目前常用的几种滤波器的基本原理,在空域使用高斯滤波、在时域使用实时自适应帧间滤波的时空结合的滤波算法,通过实验仿真,这种时空结合的滤波算法取得了较好的效果。
针对低照度视频图像采用对数处理算法增强时高频噪声也同时被放大的不足,使用多级对数处理算法来增强低照度视频图像,并通过参数来控制各级图像中的高频锐化分量,使得图像的高频噪声放大得到了有效的抑制。
为了较好地扩展增强后图像整体灰度级的动态范围,本文采用改进的对比度拉伸算法来进一步提高视频图像的对比度。
实验结果表明,采用多级对数增强后再用改进的对比度拉伸算法对低照度视频图像进行处理,能取得较好的增强效果。
针对低照度环境下,采用高斯模型方法建立背景模型,仅根据当前帧的掩码来更新背景时准确性差,容易造成背景点误判的缺点,为此依据连续三帧的掩码的总体作用,对高斯背景建模的更新算法进行了改进,使其可以较准确及时地更新背景。
从仿真结果可看出该算法能使检测得到的运动目标更加完整准确。
为了提高运动目标跟踪的准确性,采用一种新的判断运动目标之间是否发生遮挡的方法,即:在检测到的运动区域内由预测目标的个数来判断。
在遮挡前使用基于归一化转动惯量值的匹配方法来寻找同一目标的后续目标,而在遮挡发生时,在卡尔曼滤波预测的基础上,使用基于模板的匹配方法进行跟踪,用搜索的最佳匹配位置来修正卡尔曼滤波模型。
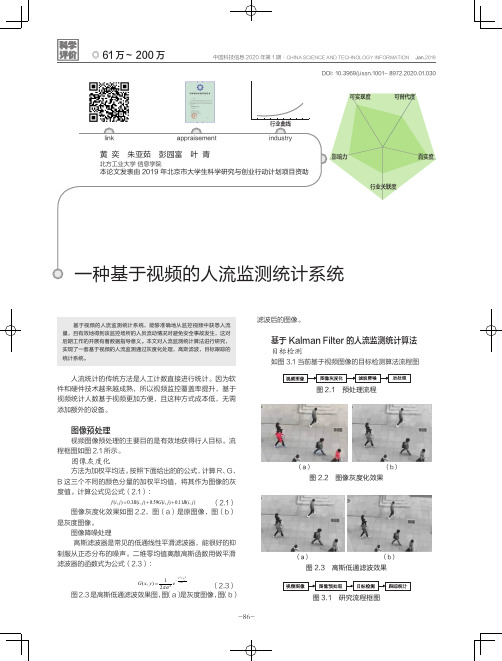
一种基于视频的人流监测统计系统
-86-
(a)
(b)
图 2.2 图像灰度化效果
(a)
(b)
图 2.3 高斯低通滤波效果
图 3.1 研究流程框图
CHINA SCIENCE AND TECHNOLOGY INFORMATION Jan.2020·中国科技信息 2020 年第 1 期
61 万~ 200 万◎
卡尔曼滤波器
一般情况下,我们分别用 L、V、S、Vs 及 Δt 分别表
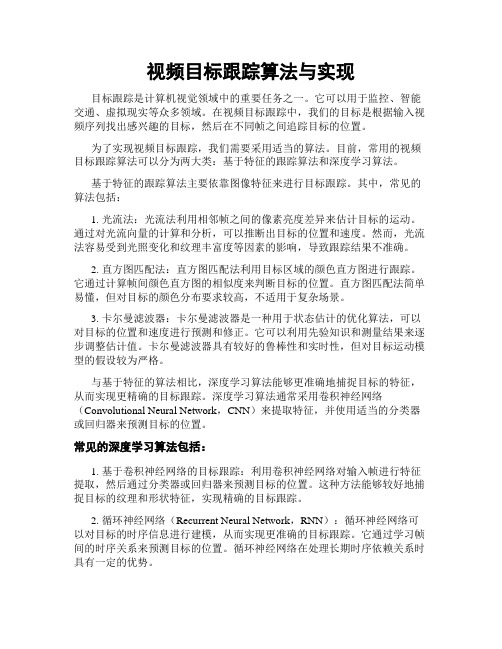
图 4.3 SSD 目标检测算法框架图
以下三步为其步骤:
1)综合多层卷积特征图输出检测结果
如图 4.3 所示,对左侧原始输入图像做处理,蓝色框内
为较小物体的尺寸特征图,红色框内为较大物体的尺寸特征
图。
2)使用卷积直接得出检测结果
例如对于维度为 m*n*p 的特征图,采用 3*3*p 的卷积
(4.1)
其中 N 代表建立匹配的 default box 的数量。类别损失
0 0 0 0 0 1 0
0 0 0 0 0 0 1
(3.8)
1 0 0 0
R
=
0 0
1 0
0 1
0 0
0 0 0 1
(3.9)
考虑到初始化造成的随机性较大,对初始的协方差矩阵
赋值如式(3.10):
100 0 0 0 0 0 0
0
100
0
0
0
0
00 0 100 0 0 0 P0=0
0
(3.4)
状态向量 x 需要记录位置、速度以及尺寸信息,可以表
示为式(3.5):
x = lx ly s r vx vy vs T
(3.5)
其中,lx 为 x 轴投影分量,ly 为 y 轴投影分量,vx 为
视频目标跟踪算法与实现
视频目标跟踪算法与实现目标跟踪是计算机视觉领域中的重要任务之一。
它可以用于监控、智能交通、虚拟现实等众多领域。
在视频目标跟踪中,我们的目标是根据输入视频序列找出感兴趣的目标,然后在不同帧之间追踪目标的位置。
为了实现视频目标跟踪,我们需要采用适当的算法。
目前,常用的视频目标跟踪算法可以分为两大类:基于特征的跟踪算法和深度学习算法。
基于特征的跟踪算法主要依靠图像特征来进行目标跟踪。
其中,常见的算法包括:1. 光流法:光流法利用相邻帧之间的像素亮度差异来估计目标的运动。
通过对光流向量的计算和分析,可以推断出目标的位置和速度。
然而,光流法容易受到光照变化和纹理丰富度等因素的影响,导致跟踪结果不准确。
2. 直方图匹配法:直方图匹配法利用目标区域的颜色直方图进行跟踪。
它通过计算帧间颜色直方图的相似度来判断目标的位置。
直方图匹配法简单易懂,但对目标的颜色分布要求较高,不适用于复杂场景。
3. 卡尔曼滤波器:卡尔曼滤波器是一种用于状态估计的优化算法,可以对目标的位置和速度进行预测和修正。
它可以利用先验知识和测量结果来逐步调整估计值。
卡尔曼滤波器具有较好的鲁棒性和实时性,但对目标运动模型的假设较为严格。
与基于特征的算法相比,深度学习算法能够更准确地捕捉目标的特征,从而实现更精确的目标跟踪。
深度学习算法通常采用卷积神经网络(Convolutional Neural Network,CNN)来提取特征,并使用适当的分类器或回归器来预测目标的位置。
常见的深度学习算法包括:1. 基于卷积神经网络的目标跟踪:利用卷积神经网络对输入帧进行特征提取,然后通过分类器或回归器来预测目标的位置。
这种方法能够较好地捕捉目标的纹理和形状特征,实现精确的目标跟踪。
2. 循环神经网络(Recurrent Neural Network,RNN):循环神经网络可以对目标的时序信息进行建模,从而实现更准确的目标跟踪。
它通过学习帧间的时序关系来预测目标的位置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于低通滤波的高机动视频目标跟踪本科毕业设计(论文)题目:(中文)基于低通滤波的高机动性视频目标跟踪(英文)Enhanced Lowpass Filter Based VidePredictive Tracking for Target withHigh Mobility摘要【摘要】在现代检测领域中,预测目标是一种很普遍的现象。
在预测目标移动状态过程中,应用滤波法是常用的技术手段。
在众多预测技术当中,人们常常使用卡尔曼滤波器来跟踪目标在运动情况下的轨迹。
然而,卡尔曼滤波仍存在一些缺点:用来预测轨迹时尚缺乏精确度,为了解决这个问题,文中推荐另一种传统滤波——低通滤波。
设计低通滤波的方法就是掺入带惯性的一阶泰勒级数,在文中使用过程中还要考虑目标所在的运动状态。
基于这种情况,则需要在级数中加入线性项和惯性项算法,这两种算法分别代表高机性和非高机性两种状况。
当预测目标状态时,要考虑目标高机动性(目标速度在瞬间发生变化)和非高机动性,当目标高速移动时,低通滤波检测速度的变化,检测到所给定的目标高机动变化根据运动情况则要重新配置低通滤波来实现预测跟踪。
为了证明低通滤波的实用性,在预测中融入卡尔曼滤波共同对目标检测跟踪,实验表明在预测轨迹跟踪质量中,所建议的低通滤波对预测轨迹具有很好的效果比卡尔曼滤波更加有预测能力,从而证明了它的可行性。
所以,在视频跟踪应用范围内,把低通滤波作为预测跟踪器是很好的选择。
【关键词】视频跟踪;低通滤波;跟踪质量;卡尔曼滤波;高机动性Enhanced Lowpass Filter Based Video Predictive Tracking for Target with High Mobility Abstract【ABSTRACT】In the field of modern detection , prediction target is a very common phenomenon. Predict the state of the process target mobile application filtering method is commonly used techniques . Kalman filter is one of GM , which is mainly used in predicting the movement of the target track . However , Kalman filtering are still some disadvantages: lack of precision for predicting the trajectory of the fashion , in order to solve this problem , another conventional paper filter recommended - low-pass filtering. Low-pass filter designed method is incorporated with a first order Taylor series of inertia , in the article by using filter which should also be considered when the target is moving. Based on this situation , you need to add linear and inertia algorithms in series , these two algorithms represent two high status which is a high mobility and non- mobility When the predicted target state , to consider changes in the target high mobility high mobility ( target speed change occurs at the moment ) and non- high maneuverability , when the target is moving at high speed , low-pass filtering to detect changes in the speed detected by a given target will have to be reconfigured according to the movement of the low pass filter to achieve the forecast track . To prove the usefulness of the low-pass filtering , Kalman filter integrated into the joint in the forecast for target detection and tracking , trajectory tracking experiments show that the quality of the prediction , the proposed low-pass filter to predict the trajectory has a good effect Kalman filtering more predictive ability , thus proving its feasibility . So, in the video tracking applications , the low-pass filter as a predictor tracker is a good choice .【Key words】:Video predictive tracking; Lowpass filter; Trackingquality; Kalman filter; High mobility;目录1.1绪论 (1)1.1.1课题的背景及意义 (1)1.1.2课题研究的意义和目的 (1)1.1.3Matlab简介 (1)1.1.4论文的主要内容 (1)2高机动性目标识别与跟踪 (2)2.1.1低通滤波原理 (1)2.1.3低通滤波设计算法 (1)2.1.4图像的处理 (2)2.1.5目标运动的分析 (2)2.1.6低通滤波的预测跟踪 (1)3低通滤波与卡尔曼滤波的比较 (3)3.1卡尔曼滤波的预测跟踪 (3)3.1.1卡尔曼滤波的简介 (3)3.1.2卡尔曼滤波预测原理 (3)3.1.3卡尔曼滤波预测跟踪 (3)3.1.4低通滤波与卡尔曼滤波比较 (3)4结论 (4)4.1实验的流程图 (4)4.2程序运行的结果 (4)4.3最终分析与结论 (4)5总结与展望 (5)参考文献 (7)致谢 (8)附录 (8)1绪论1.1.1课题的背景及意义在十几年来,科学技术快速发展中,计算机对数据分析和存储数据的功能得到很大提升,分析运算成本大幅降低,给视频对象的跟踪技术创造了良好条件。
因此,一些研究者开始专注于相关视频跟踪方面的研究。
人们日益认识到视频跟踪技术已成为科学技术研究和实际应用中不可缺少的技术之一。
在计算机视觉研究中引起众多研究者的极大兴趣技术之一的就是视频跟踪技术,由于人们对跟踪技术不倦的探索,其主要原因在于两个方面:在一方面,计算和存储成本显著下降,视频速率或使所述的视频图像序列采集和存储速率成为可能;在另一方面,视频跟踪技术具有非常广阔的市场前景,这也是研究者对其探索的主要动力。
除了在智能视频监视系统,视频跟踪技术还有一个非常重要的应用,即人与计算机互相交流,物体运动地分析,对运动目标地识别,对不同移动目标地分类,机器人视觉导航,图像压缩,流量检测和虚拟现实,并且视频跟踪技术在其他方面也有重要的应用;总之,研究目标运动情况并对其预测跟踪的技术对现实应用发挥了巨大作用【7】文中所用到的滤波器是众多可以处理信号装置中之一,滤波器应用范围十分广泛,其主要作用在于现代化电子设备以及不同控制系统,滤波器的质量优劣影响着产品的品质。
自从1960年以来,随着技术地发展,设备不断地更新换代,集成技术大面积的推广,滤波器的品质有了很大的提升。
如今的滤波器向功率损耗少处理数据稳定对计算机内存空间占用率小,产品价格更加低廉等方向发展。
到了若干年后,滤波器的性能已经大大地优化,不同应用型的滤波器被广泛地开发出来,高效率性能的滤波器被人们用于各种产品研发。
但是,在技术不断升级的时代,人们对滤波器的研究还在开发当中。
滤波器可分为经典和数字两大类,文中所研究的滤波器是经典型低通滤波器。
1.1.2课题研究的意义和目的由于复杂的视频跟踪背景图像对检测有着很大的影响,造成人们对运动检测变得十分困难。
人们为了更加了解目标对象跟踪相关知识,使用不同的方法对目标进行跟踪并提出了一些见解。
因此,本文的目的的是利用低通滤波来预测跟踪目标的运动状态。
低通滤波器可预测跟踪目标运动状态非高机性和高机性。
当用有效的跟踪方法通过所述滤波处理控制并重新配置流动性高的移动目标。
检验给定视频序列的跟踪情况,从而达到预测跟踪的目的。
视频目标跟踪已用于计算机视频系统中,并且大量跟踪算法应用于视频跟踪中。
两种最典型的跟踪算法是有关数据方面的驱动(从基底向上延伸)和有关模型方面驱动(从最高处向下延伸)。
前者为典型的均值漂移方法,后者可由卡曼尔滤波来证实,在下一个视频帧里,准确预测目标移动轨迹是节约寻找目标时间和在搜索窗口内匹配预测目标所不可缺少的一步。
然而,以内核数据驱动的跟踪策略为基础的如meanshift并不具有预测能力。
相比之下,在许多跟踪实现中,卡尔曼滤波作为预测器,这是因为卡尔曼预测以实现最终优化状态估计的事实,其被称为“先验状态估计”,在校正过程中被称为“后验状态估计”。
然而,在这文中所关心的是:由kalman所提供的预测精确性还达不到技术的期望。
为了改善预测的精确度,在视频预测跟踪目标中,有一种新的方法:设计LPF并将其运用到对高机目标运动进行跟踪。
与卡尔曼滤波相比,低通滤波能够显著地改善整体的预测精确度,但是目标突然改变运动方向时,低通滤波的预测能力不如卡尔曼滤波。
在本文中,LPF是专为预测视频运动而设计的。
作为视频预测跟踪,卡尔曼滤波器和低通滤波器是投入到相同实验室所生成的视频中来预测给定的目标来的运动轨迹。
测试后显示:所推荐的低通滤波器比卡尔曼滤波器的预测跟踪效果更加准确,因此低通滤波器可以作为预测跟踪的另一种选择。