实例—LED驱动程序的设计
Android驱动开发实例(控制LED灯)(精)

Android驱动例子(LED灯控制)本例子,讲述在Android2.1上完全自已开发一个驱动去控制硬件口并写应用测试该驱动,通过这样一个例子,解析android下的驱动开发流程的应用调用流程,可以说是很好的入门引导要达到的效果:通过Android的应用,调用驱动程序,在开发板上控制4个LED的亮灭。
一、硬件原理如上图,通过4个IO口控制这LED,低电平LED亮,这4个IO口分别是GPM1, GPM2, GPM3, GPM4,二、驱动程序1、在kernel文件夹下的driver目录,新键驱动文件夹# cd kernel_Android_2.6.28.6/drivers进到开发板的kernel目录,建驱动文件夹#mkdir ledtest2、在/driver/ledtest目录下,新建leddriver.c ,leddriver.h , Kconfig, Makefile 等4个文件leddriver.c1. #include2. #include3. #include4. #include/* For __init/__exit/... */5. #include6. #include7. #include8. #include9. #include10. #include11. #include12. #include13. #include14. #include15. #include16. #include17. #include//for register_chrdev(18. #include19. #include20. #include"leddriver.h"21. #include/* For MODULE_ALIAS_MISCDEV22. (WATCHDOG_MINOR */23. #include/* For the watchdog specific items */24. #include/* For file operations */25. #define Viberator_MAJOR 97 //?÷éè±?o?26. #define SCULL_NR_DEVS 427. #define SCULL_QUANTUM 400028. #define SCULL_QSET 100029. //---do as the GIO driver30. #define DEVCOUNT 431. #define GIO_MINOR 2 /* GIO minor no. */32. static dev_t dev; //éê ?? μ?μ??÷ éè±? o?33. static struct cdev *cdev_p;34. static int openCnt;35. //--è±?á?------------36. int VIB_major = 97;//we asigment it for test37. int VIB_minor = 0;38. int VIB_nr_devs = SCULL_NR_DEVS;39. int VIB_quantum = SCULL_QUANTUM;40. int VIB_qset = SCULL_QSET;41.42. static struct class *vib_dev_class;43. #define GPNCON S3C64XX_GPNCON44. #define GPNDAT S3C64XX_GPNDAT45. #define GPNPUD S3C64XX_GPNPUD46. #define GPMCON S3C64XX_GPMCON47. #define GPMDAT S3C64XX_GPMDAT48. #define GPMPUD S3C64XX_GPMPUD49.50. #define VIB_ON 0x1151. #define VIB_OFF 0x2252. static const struct file_operations GPIO_Viberator_ctl_ops={53. .owner = THIS_MODULE,54. .open = GPIO_VIB_open,55. .read =GPIO_VIB_read,56. .write =GPIO_VIB_write,57. .ioctl = GPIO_VIB_ioctl,58. .release =GPIO_VIB_release,59. };60. ssize_t GPIO_VIB_read(struct file * file,char * buf,size_t count,loff_t * f_ops61. {62. printk(" GPIO_VIB_read \r\n";63. gpio_direction_output(S3C64XX_GPM(3, 0;//64. return count ;65. }66. ssize_t GPIO_VIB_write (struct file * file,const char * buf, size_tcount,loff_t * f_ops67. {68. printk(" GPIO_VIB_write \r\n";69. gpio_direction_output(S3C64XX_GPM(3, 1;//70. return count;71. }72.73. //ssize_t GPIO_VIB_ioctl(struct inode * inode,struct file * file,unsigned int cmd, long data74. static int GPIO_VIB_ioctl(struct inode *inode, struct file *file, unsigned int cmd, unsigned long arg75. {76. printk(KERN_ERR"VIB:GPIO_VIB_ioctl --CMD=%x \n",cmd;77. switch(cmd78. {79. case VIB_ON:80. gpio_direction_output(S3C64XX_GPM(1, 0;//81. gpio_direction_output(S3C64XX_GPM(2, 0;//82. gpio_direction_output(S3C64XX_GPM(3, 0;//83. gpio_direction_output(S3C64XX_GPM(4, 1;//84. printk(KERN_ERR"VIB:GPIO_VIB_ioctl --VIB_ON\n";85. break;86. case VIB_OFF:87. {88. printk(KERN_ERR"VIB:GPIO_VIB_ioctl --VIB_OFF\n";89. gpio_direction_output(S3C64XX_GPM(1, 1;//90. gpio_direction_output(S3C64XX_GPM(2, 1;//91. gpio_direction_output(S3C64XX_GPM(3, 1;//92. gpio_direction_output(S3C64XX_GPM(4, 0;//93. break;94. }95. default:break;96.97. }98. //gpio_free(S3C64XX_GPN(7;99. }100. ssize_t GPIO_VIB_open(struct inode * inode,struct file * file 101. {102. //?£?éêy103. //MOD_INC_USE_COUNT;104. printk("GPIO_VIB_open( \n";105. return 0;106. }107. ssize_t GPIO_VIB_release(struct inode * inode, struct file * file 108. {109. // MOD_DEC_USE_COUNT;//?£?éêy??110. printk("GPIO_VIB_release( \n";111. return 0;112. }113. static int GPIO_VIB_CTL_init(void114. {115. int ret = -ENODEV;116. int error ;117. printk("---------------------------------------------- \r\n"; 118. //3?ê??ˉú119. s3c_gpio_cfgpin(S3C64XX_GPM(1, S3C_GPIO_SFN(1;//GPM1 output 120. s3c_gpio_cfgpin(S3C64XX_GPM(2, S3C_GPIO_SFN(1;//GPM2 output 121. s3c_gpio_cfgpin(S3C64XX_GPM(3, S3C_GPIO_SFN(1;//GPM3 output 122. s3c_gpio_cfgpin(S3C64XX_GPM(4, S3C_GPIO_SFN(1;//GPM4 output 123. #if 1 /*?2ì?·?ê?×¢2á?y?ˉ*/124. ret = register_chrdev(Viberator_MAJOR, "viberator",&GPIO_Viberator_ctl_ops;125. if (ret < 0 {126. printk(KERN_ERR "VIB: unable to get major %d\n", ret;127. return ret;128. }129. //′′?¨\uc1class130. vib_dev_class = class_create(THIS_MODULE, "viberator";131. if (IS_ERR(vib_dev_class {132. unregister_chrdev(Viberator_MAJOR, "capi20";133. return PTR_ERR(vib_dev_class;134. }135. //′′?¨?úμ?£?136. device_create(vib_dev_class, NULL, MKDEV(Viberator_MAJOR, 0, NULL, "vib"; 137. // create a point under /dev/class/vib138. //í¨1yéaá?2?£??y?ˉ?ó??oó£??í?á?ú/dev/class/éú3é\uc1vib?úμ?£?ó|ó?3ìDò?éò2ù×÷tù2ù×÷?aúμ?£?í¨1y\uc1open ,write,read μèoˉêy2ù×÷£??ê?é?éò??′oó??μ?ó|ó?ê?ày3ìDò?£139. return 0;140. #endif141. #if 0/* ×¢2á?ˉì?*/142. if ((error = alloc_chrdev_region(&dev, 0, DEVCOUNT, "vibrate" < 0143. {144. printk(KERN_ERR145. "VIB: Couldn't alloc_chrdev_region, error=%d\n",146. error;147. return 1;148. }149. printk("dev = %d \n",dev;150. cdev_p = cdev_alloc(;151. cdev_p->ops = &GPIO_Viberator_ctl_ops;152. error = cdev_add(cdev_p, dev, DEVCOUNT;153. if (error {154. printk(KERN_ERR155. "VIB: Couldn't cdev_add, error=%d\n", error;156. return 1;157. }158.159. vib_dev_class = class_create(THIS_MODULE, "vib-dev";160. if (IS_ERR(vib_dev_class {161. res = PTR_ERR(vib_dev_class;162. goto out_unreg_class;163. }164. return 0;165. #endif166. out_unreg_class:167. class_destroy(vib_dev_class;168. return 1;169. }170.171. static int __init S3C6410_VIB_init(void172. {173. int ret = -ENODEV;174. //μ÷ó?oˉêy175. printk(KERN_ERR "Auly: S3C6410_VIB_init---\n";176. ret = GPIO_VIB_CTL_init(;177. if(ret178. {179. printk(KERN_ERR "Auly: S3C6410_VIB_init--Fail \n"; 180. return ret;181. }182. return 0;183. }184. static void __exit cleanup_GPIO_VIB(void185. {186. //×¢?úéè±?187. // devfs_unregister_chrdev(Viberator_MAJOR,"gpio_vib_ctl";188. #if 0189. cdev_del(cdev_p;190. unregister_chrdev_region(dev, DEVCOUNT;191. class_destroy(vib_dev_class;192. #endif193. device_destroy(vib_dev_class, MKDEV(Viberator_MAJOR, 0;194. class_destroy(vib_dev_class;195. unregister_chrdev(Viberator_MAJOR, "viberator";196. }197. MODULE_LICENSE("GPL";198. MODULE_DESCRIPTION("Peter first driver";199. MODULE_ALIAS_CHARDEV(Viberator_MAJOR, 0;200.201. module_init(S3C6410_VIB_init;202. module_exit(cleanup_GPIO_VIB;leddriver.h文件1. ssize_t GPIO_VIB_read(struct file * file,char * buf,size_t count,loff_t * f_ops;2. ssize_t GPIO_VIB_write (struct file * file,const char * buf, size_t count,loff_t * f_ops;3. static int GPIO_VIB_ioctl(struct inode *inode, struct file *file, unsigned int cmd, unsigned long arg;4. ssize_t GPIO_VIB_open(struct inode * inode,struct file * file;5. ssize_t GPIO_VIB_release(struct inode * inode, struct file * file;6. static int GPIO_VIB_CTL_init(void;Kconfig 文件1. config LEDTEST2. tristate "LED test for ARMeasy"3. default n4. help5. this is a LED driver for ARMEASY with S3C6410Makefile文件1. obj-$(CONFIG_LEDTEST+=leddriver.o3、在内核配置里菜单里加入本驱动的配置项达到的效果是,可以通过内核配置来选择是否把本驱动编译进内核里,也就是出现在make menuconfig 后出来的界面里,可以参考9.8章<Android添加新驱动方法>1)在arch/arm/Kconfig文件里 menu "Device Drivers"与 endmenu之间添加1. source "drivers/ledtest/Kconfig"2)在drivers/Kconfig menu "Device Drivers" 和 endmenu之间添加1. source "drivers/ledtest/Kconfig"3修改/drivers/Makefile文件1. Obj-$(CONFIG_LEDTEST +=ledtest/4、编译驱动在kernel目录下,终端输入1. #make menuconfig“Device Drivers” 下面会看到“LED test for ARMeasy”,选择它,保存并退出1. #make这样,就会在/drivers/ledtest目录下得到leddrivr.ko文件,它就是驱动目标文件,已级编译进了zImage 里了,只要用这个kernel烧录到开发板,开机就会自动加载本驱动,PS,如果发现如上编译,没有在ledtest目录下生成leddriver.ko文件,也就是本根没有去编译本驱动,那就把ledtest目录入到/drivers/misc目录下,相应的修改misc下面,然后,在makefile里,不用选直接写成obj-y += leddriver.o,这样强制的包含进去编译。
led驱动程序设计流程
led驱动程序设计流程
LED驱动程序设计的基本流程大致如下:
1. 需求分析:首先,你需要明确你的LED驱动程序需要实现什么功能。
这可能包括亮度控制、颜色控制、动态效果等。
2. 选择合适的LED:根据你的需求,选择合适的LED型号。
这需要考虑LED的电压、电流需求,以及它的颜色和亮度特性。
3. 选择合适的电源:为LED提供稳定的电流和电压。
这可能是一个简单的线性电源或更复杂的开关电源。
4. 设计电路:设计驱动LED的电路。
这可能包括LED的正极和负极连接,以及任何需要的电阻或电容。
5. 编写代码:使用适当的编程语言(如C或Arduino语言)编写代码,以控制LED的行为。
这可能包括设置初始亮度、实现动态效果等。
6. 测试和调试:在开发过程中,你需要不断地测试和调试你的代码,以确保它按预期工作。
7. 优化和改进:一旦你的驱动程序开始工作,你可能会发现有改进的空间。
这可能包括提高效率、增加新功能、改进用户界面等。
8. 文档化:最后,记录你的设计决策、使用的元件、代码等,以便将来参考或他人使用。
以上就是LED驱动程序设计的基本流程,希望对你有所帮助。
LED驱动原理设计及案例
LED驱动原理设计及案例本文首先介绍了特种照明的应用环境,然后,详细阐述了利用DC/DC稳压器实现恒压转恒流设计的基本原理和实际案例,并说明了大功率LED驱动器设计与散热部分设计应该注意的事项,最后指出了大功率LED新应用对驱动器设计提出的新要求,给出了国家半导体公司的完整解决方案的指南,它有助于从事LED照明行业的电子设计工程师全面掌握最新的LED驱动器系统设计技术。
虽然大功率LED现在还不能大规模取代传统的白炽灯,但它们在室内外装饰、特种照明方面有着越来越广泛的应用,因此掌握大功率LED恒流驱动器的设计技术,对于开拓大功率LED 的新应用至关重要。
LED按照功率和发光亮度可以划分为大功率LED、高亮度LED及普通LED。
一般来说,大功率LED的功率至少在1W以上,目前比较常见的有1W、3W、5W、8W和10W。
恒流驱动和提高LED的光学效率是LED 应用设计的两个关键问题,本文首先介绍大功率LED 的应用及其恒流驱动方案的选择指南,然后以美国国家半导体(NS)的产品为例,重点讨论如何巧妙应用LED恒流驱动电路的采样电阻提高大功率LED的效率,并给出大功率LED驱动器设计与散热设计的注意事项。
驱动芯片的选择LED驱动只占LED照明系统成本的很小部分,但它关系到整个系统性能的可靠性。
目前,美国国家半导体公司的LED驱动方案主要定位在中高端LED照明和灯饰等市场。
灯饰分为室内和室外两种,由于室内LED灯所应用的电源环境有AC/DC和DC/DC转换器两种方式,所以驱动芯片的选择也要从这两方面考虑。
图1:利用DC/DC稳压器FB反馈端实现从恒压驱动(左图)到恒流驱动(右图)的转换。
1. AC/DC转换器AC/DC分为220V交流输入和12V交流输入。
12V交流电是酒店中广泛应用的卤素灯的电源,现有的LED可以在保留现有交流12V的条件下进行设计。
针对替代卤素灯的设计,美国国家半导体LM2734的主要优势是体积小、可靠性高、输出电流高达1A,恰好适合卤素灯灯口直径小的特点。
实验十二 Led驱动程序实验
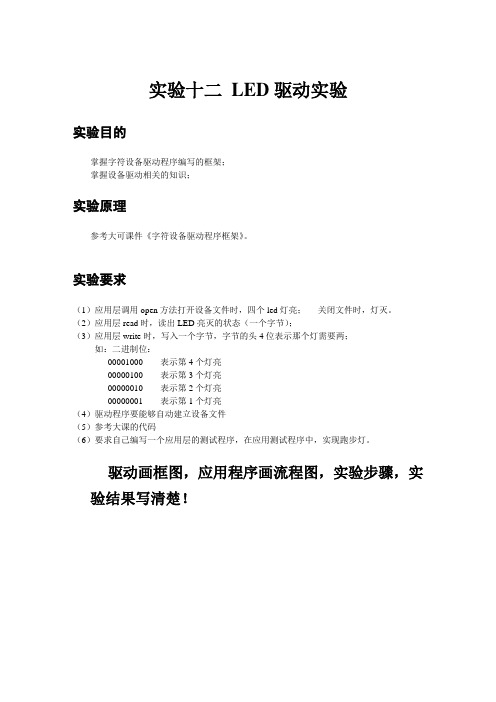
实验十二LED驱动实验
实验目的
掌握字符设备驱动程序编写的框架;
掌握设备驱动相关的知识;
实验原理
参考大可课件《字符设备驱动程序框架》。
实验要求
(1)应用层调用open方法打开设备文件时,四个led灯亮;关闭文件时,灯灭。
(2)应用层read时,读出LED亮灭的状态(一个字节);
(3)应用层write时,写入一个字节,字节的头4位表示那个灯需要两;
如:二进制位:
00001000 表示第4个灯亮
00000100 表示第3个灯亮
00000010 表示第2个灯亮
00000001 表示第1个灯亮
(4)驱动程序要能够自动建立设备文件
(5)参考大课的代码
(6)要求自己编写一个应用层的测试程序,在应用测试程序中,实现跑步灯。
驱动画框图,应用程序画流程图,实验步骤,实验结果写清楚!。
汽车LED照明驱动电路设计实例

汽车LED照明驱动电路设计实例设计需求:设计一个汽车LED照明驱动电路,该电路输入电压为12V,输出电压为3V,所需的电流为800mA。
设计步骤:1.确定LED参数在设计开始之前,首先需要确认LED的工作电流和电压参数。
假设所使用的LED的额定电流为800mA,额定电压为3V。
2.计算驱动电源参数由于输入电压为12V,输出电压为3V,所以需要设计一个降压电路来将输入电压降低到3V。
根据LED的电流参数,可计算出驱动电源的功率需求:P=V×I=3V×0.8A=2.4W。
3.选择开关电源芯片根据电源的功率需求,我们可以选择适合的开关电源芯片。
一般常用的芯片有LM2596、LM2576等,这些芯片具有高效率和稳定性。
4.组件选型和参数计算根据选择的开关电源芯片,我们还需要确定电感、电容和二极管等组件的参数。
根据芯片的数据手册,通过输入电压、输出电压和输出电流等参数计算得到。
5.进行原理图设计将选择的开关电源芯片和其他电子元件连接起来,形成一个完整的电路。
在原理图设计中,需要考虑到电路的稳定性和可靠性,避免电子元件之间的干扰和短路。
6.PCB布局设计在PCB布局设计中,需要考虑到电子元件的布置和连接,以保证电路的正常运行。
在布局设计中还需注意电路的EMC电磁兼容性,尽量减小电路之间的干扰和电磁辐射。
7.元器件焊接和组装根据PCB布局设计,对电子元件进行焊接和组装。
焊接时需要注意焊接接触的质量,避免冷焊、漏焊等导致电路出现问题。
8.功耗测试和调试完成电路的焊接和组装后,需要进行功耗测试和调试。
测试时需要使用电子负载等设备对电路进行负载测试,以确保电路能够正常工作,并符合设计要求。
总结:上述是一个简单的汽车LED照明驱动电路设计实例。
在实际设计过程中,还需要考虑到汽车电路的稳定性、可靠性和安全性等因素,以确保电路在各种工况下能够正常工作。
此外,还需要根据具体的需求进行电路参数的调整和优化,以实现更好的性能和效果。
led灯具电源驱动方案设计

led灯具电源驱动方案设计方案是从目的、要求、方式、方法、进度等都部署具体、周密,并有很强可操作性的计划。
有关灯具的电源驱动方案设计,欢迎大家一起来借鉴一下!一、项目基本情况1.1 项目建设需求多功能礼堂舞台演出显示系统分为主屏、辅屏和会标屏3个部分。
主屏建设需求是建设大幅面、高清晰度的大屏幕,显示多个计算机数字信号、本会场摄像、远程监视或异地会商的视频信号等,实现摄像、讲解资料、视频会议等画面的显示,同时还要兼顾舞台演出背景;辅屏建设需求是显示一个标清信号,实现会议辅助内容的显示,也可用作演出时的报幕、字幕等;会标屏则需要显示多种颜色的文字。
礼堂舞台部分宽20m、深17m、高18m,台口处宽15m、高7.8m ;舞台上方安装灯光、幕布等舞台机械装置;台口两侧耳墙距地面3m,宽8m,高6m。
设计主屏显示面积至少72㎡(12m×6m),屏前是主席台会议和演出的场所,屏后则是演员通过和维护空间,第一排观众距屏至少17m ;辅屏在耳墙上,显示面积至少12㎡(4m×3m)。
二、影响室内LED显示屏质量的关键技术室内LED显示屏在设计屏体时,要考虑显示内容、场地空间条件、显示屏尺寸或像素大三个重要因素,同时要确保生产工艺、技术指标等适合室内实际应用需求,再结合项目造价,进行合理设计。
2.1 LED显示屏点间距视觉颗粒感主要来自人眼有一定的分辨力,在一定距离观看两点,当两点紧密到一定程度时,人眼将无法分辨。
近两年随着LED显示屏制造技术的提高,小间距LED显示屏体分辨率不断提升,室内显示设计已从初始选择最小的点距规格方案提升到选择合适的点距规格方案。
表1 将比较典型的联诚发室内LED显示屏规格对比,P1.6、P2、P2.5、P3、P4、P5为室内常用规格,“P3”表示像素点距为3mm,最小视距为人眼分辨不出像素点颗粒的距离,但这个距离长时间观看会损伤视力,最佳视距为观看屏幕舒适的距离,也是最清晰的距离。
EDA实验5数码管(LED)驱动显示设计
EDA实验5数码管(LED)驱动显示设计实验六数码管(LED)驱动显示设计一、实验目的1.学习7段数码显示译码器设计;2.学习硬件扫描显示电路的设计。
二、实验原理1、7段数码显示译码器原理通常的小规模专用IC,如74或4000系列的器件只能作十进制BCD码译码,然而数字系统中的数据处理和运算都是2进制的,所以输出表达都是16进制的,为了满足16进制数的译码显示(数码管可以显示0~F),最方便的方法就是利用译码程序在FPGA/CPLD中来实现。
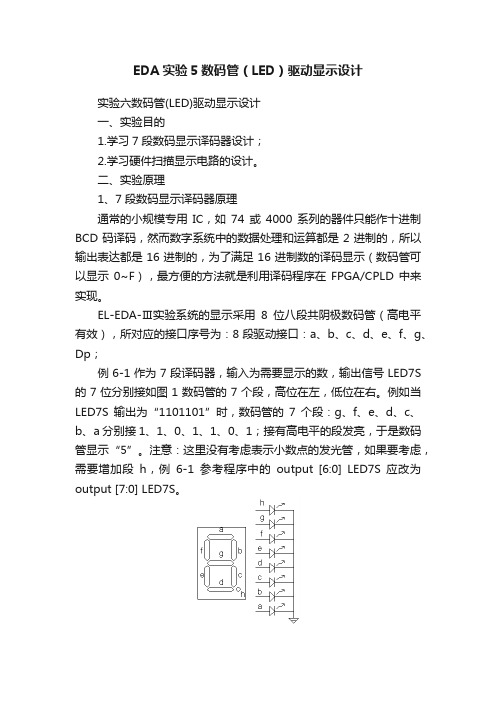
EL-EDA-Ⅲ实验系统的显示采用8位八段共阴极数码管(高电平有效),所对应的接口序号为:8段驱动接口:a、b、c、d、e、f、g、Dp;例6-1作为7段译码器,输入为需要显示的数,输出信号LED7S 的7位分别接如图1数码管的7个段,高位在左,低位在右。
例如当LED7S输出为“1101101”时,数码管的7个段:g、f、e、d、c、b、a分别接1、1、0、1、1、0、1;接有高电平的段发亮,于是数码管显示“5”。
注意:这里没有考虑表示小数点的发光管,如果要考虑,需要增加段h,例6-1参考程序中的output [6:0] LED7S 应改为output [7:0] LED7S。
图6-1共阴数码管及其电路【例6-1】module DECL7S (A, LED7S);input [3:0] A;output [6:0] LED7S;reg [6:0] LED7S;always @(A)begincase(A)4'b0000 : LED7S<=7'b0111111;//从此句可以看出LED7S[7]应该接到数码管的//g段上4'b0001: LED7S <= 7'b0000110 ;4'b0010: LED7S <= 7'b1011011;4'b0011: LED7S <= 7'b1001111;4'b0100: LED7S <= 7'b1100110 ;4'b0101: LED7S <= 7'b1101101;4'b0110: LED7S <= 7'b1111101 ;4'b0111: LED7S <= 7'b0000111 ;4'b1000: LED7S <= 7'b1111111 ;4'b1001: LED7S <= 7'b1101111 ;4'b1010: LED7S <= 7'b1110111 ;4'b1011: LED7S <= 7'b1111100 ;4'b1100: LED7S <= 7'b0111001 ;4'b1101: LED7S <= 7'b1011110 ;4'b1110: LED7S <= 7'b1111001 ;4'b1111: LED7S <= 7'b1110001 ;endcaseendendmodule2、8位数码扫描显示原理四位拨码开关产生8421BCD码,经译码电路后成为7段数码管(不包括小数点段位)的字形显示驱动信号(a…g)。
led恒流驱动设计方案
06 结论与展望
设计总结与成果
01
高效稳定驱动
通过采用恒流驱动技术,LED灯具能够获得稳定一致的电流,确保亮度
均匀且防止LED过热损坏,有效延长LED灯的使用寿命。
02
节能环保
恒流驱动能够降低能耗,提高电能利用效率,同时LED作为绿色环保光
源,无频闪、无红外和紫外辐射,符合环保节能的时代趋势。
03
长时间老化测试:对LED驱动器进行长时间老化 测试,观察其性能变化,以评估驱动器的使用寿 命和稳定性。
温度特性测试:在不同环境温度下测试LED驱动 器的恒流性能,验证驱动器的温度稳定性和可靠 性。
通过以上PCB布局与布线设计、恒流驱动电路的 实现以及测试方法与设计验证,可以完成LED恒 流驱动设计方案。这一方案将有助于实现LED灯 具的高效、稳定驱动,提升整体照明效果。
恒流驱动电路的实现
驱动芯片选择
选择合适的恒流驱动芯片,如基 于PWM调光功能的芯片,可以实 现LED灯光的恒流驱动和调光控 制。
外围电路设计
根据驱动芯片的数据手册,设计 合适的外围电路,如电源滤波电 路、过温保护电路等,以确保恒 流驱动电路的稳定工作。
测试方法与设计验证
恒流精度测试:通过电子负载仪等测试设备,测 试LED驱动器在不同输入电压和负载条件下的恒 流精度,确保恒流驱动器的性能满足设计要求。
电源电路设计
输入电压范围选择
根据实际应用场景,选择合适的 输入电压范围,确保电源电路能 够正常工作并稳定输出所需电压
。
电源转换效率优化
采用高效率的电源转换芯片和电 路拓扑结构,降低电源电路的能
耗,提高整体效率。
过压、过流保护
在电源电路中设计过压、过流保 护机制,防止因异常电压或电流 导致的损坏,确保LED恒流驱动
led照明驱动电路设计与实例精选

led照明驱动电路设计与实例精选LED(Light Emitting Diode)是一种半导体光电器件,在现代照明领域得到广泛应用。
要实现LED的照明功能,首先需要设计相应的驱动电路,以保证LED的正常工作。
本文将介绍LED照明驱动电路的设计原理和实例精选。
LED照明驱动电路设计原理LED照明驱动电路的设计原理主要包括功率转换和电流控制两个方面。
1.功率转换:LED照明需要将输入电源的直流电能转换为适合LED的电流和电压。
常见的功率转换方式有线性功率转换和开关功率转换两种。
线性功率转换方式简单,但效率低,常用于小功率LED照明。
其中,电阻器限流电路和电流源限流电路是两种简单的线性驱动电路。
电阻器限流电路通过串联电阻器来限制LED的电流,但有功率损耗大的缺点。
电流源限流电路通过电流源和电阻器来限制LED的电流,有着更好的稳定性和效率,但制作复杂。
开关功率转换方式包括开关转换器和开关稳流源两种。
其中,开关转换器常见的有降压型、升压型和降升压型。
降压型开关转换器是最常用的驱动方式,将输入电源的电压通过开关元件和电感器转换为合适的电流和电压供给LED。
升压型开关转换器将输入电源的电压升高后供给LED,用于高亮度LED或串联LED。
降升压型开关转换器既能将输入电压降低,也能将输入电压升高,被用于某些特殊应用场景。
2.电流控制:为了保证LED的亮度稳定,需要通过电流控制来调节LED的工作电流。
常见的电流控制方式有恒流源控制和PWM(脉宽调制)控制。
恒流源控制通过稳流电源或电流源来提供固定的工作电流,保证LED的亮度稳定。
PWM控制通过调节开关元件的导通时间占空比,控制LED的亮度。
PWM控制有较高的效率,但可能引起视觉疲劳或视觉闪烁。
LED照明驱动电路实例精选以下是几个常见的LED照明驱动电路实例:1.电阻器限流电路电阻器限流电路是最简单的LED驱动电路,将LED直接与电源串联,通过串联电阻器来限制电流。
但由于电阻器会有功率损耗,效率较低,只适用于小功率LED照明。
[案例应用]LED 驱动分析与设计(组图)
![[案例应用]LED 驱动分析与设计(组图)](https://img.taocdn.com/s3/m/81de3d91daef5ef7ba0d3c2a.png)
LED是一种固体光源,当它两端加上正向电压,半导体中的少数载流子和多数载流子发生复合,放出的过剩能量将引起光子发射。
关键字:LED[2097篇] 设计[936篇]1.概述LED是一种固体光源,当它两端加上正向电压,半导体中的少数载流子和多数载流子发生复合,放出的过剩能量将引起光子发射。
采用不同的材料,可制成不同颜色有发光二极管。
作为一种新的光源,近年来各大公司和研究机构对LED 的研究方兴未艾,使其光效得以大大提高,目前科研人员已研发并生产出光效达到171m/W的白色LED,已达到白炽灯的水平。
和白炽灯的相比较,LED在性能上具有很多优点。
白炽灯与白色LED的性能比较随着对LED研究的进一步深入,其光效将进一步得到提高,而其成本将一步下降,在不久的将来LED取代白炽灯甚至荧光灯而发展成21世纪的一种主要的照明光源将成为一种趋势。
新的光源需要新的电子驱动器,科研人员对LED驱动电路的研究已取得突破性进展。
2LED驱动电路原理与荧光灯的电子镇流器不同,LED驱动电路的主要功能是将交流电压转换为直流电压,并同时完成与LED的电压和电流的匹配。
LED的正向伏安特性如图1所示:所以,LED伏安特性的数字模型可用下式表示VF=Vturn-on+RsIF+(ΔVF/ΔT)(T-25℃) (1)其中,Vturn-on 是LED的启动电压Rs 表示伏安曲线的斜率T 环境温度ΔVF/ΔT是LED正向电压的温度系数,对于多数LED而言典型值为-2V/℃。
从LED的伏安曲线及数字模型看,LED在正向导通后其正向电压的细小变动将引起LED电流的很大变化,并且,环境温度,LED老化时间等因素也将改变影响LED的电气性能。
而LED的光输出直接与LED电流相关,所以LED驱动电路在输入电压和环境温度等因素发生变动的情况下最好能控制LED电流的大小。
否则,LED的光输出将随输入电压和温度等因素变化而变化,并且,若LED电流失控,LED长期工作在大电流下将影响LED的可靠性和寿命,并有可能失效。
LED驱动设计
LED驱动开发实例具体分析: 1.优龙开发板LED灯的接口:4个LED指示灯 由4个GPIO口控制(GPF4-7),控制逻辑 是输出低电平时对应的LED点亮 2.头文件:不同驱动使用到的Linux机制和资 源不同,主要包含系统函数声明、寄存器 状态位的定义以及用于此设备驱动程序的 全局变量的定义,还有一些标准的头文件
开发LED驱动程序的流程: • 查看设备连接,原理图上LED的连接口, 理解设备工作的原理,LED的工作原理很 简单 • 定义主设备号 • 实现驱动设备的初始化 • 设计对字符设备文件的操作函数,定义相 应的结构体 • 实现中断服务(LED驱动而言不是必须的)
• 动态或静态加载驱动程序 • 测试设备
Linux对I/O的操作都定义在asm/io.h中,相应的在arm平台下,就在 asm-arm/io.h中
#define __raw_readl(a) (__chk_io_ptr(a), *(volatile unsigned int __force *)(a)) #define __raw_writel(v,a) (__chk_io_ptr(a), *(volatile unsigned int __force *)(a) = (v)) 读端口寄存器函数:从端口a返回一个32位的值 a 32 写端口寄存器函数:将一个32位的值写入端口a中
7.open方法:用户应用程序开始使用设备之 前会调用该方法,完成LED使用的端口的初 始化工作和对模块使用计数器的计数工作, 同时可以打印提示信息。实现实例如下:
static int s3c2410_leds_open(struct inode *inode,struct file *file) { int i; for(i=0;i<4;i++) { s3c2410_gpio_cfgpin(led_table[i],led_cfg_table[i]); } return 0; } s3c2410_gpio_cfgpin函数的功能:配置相应的GPIO口的功能 如pin=S3C2410_GPB5 function=00 则:设置S3C2410_GPB5为输入口 如pin=S3C2410_GPB5 function=01 则:设置S3C2410_GPB5为输出口 如pin=S3C2410_GPB5 function=10 则:设置S3C2410_GPB5为多功能口
LED驱动程序设计
LED驱动程序设计分类:ARM系统进阶班(arm裸机程序)2012-08-24 13:23 1561人阅读评论(0) 收藏举报首先声明,此文章是基于对国嵌视频教程中tiny6410有关视频教程的总结,为方便大家的复习。
再次予以感谢,感谢国嵌各位老师为我们提供如此好的视频教程,为对于想要迈入嵌入式大门却迟迟找不到合适方法的学子们指引一条光明的方向。
好了,接下来步入正题,此处将介绍tiny6410 LED驱动程序的设计。
2 下面来看看tiny6410关于LED 的原理图如图(1)所示:图1 LED原理图3 LED实例,代码如下所示:(代码摘自\光盘4\实验代码\3-3-1\src\main.c) main.c[cpp]view plaincopy1./**********************************************************2.*实验要求:用Tiny6410上的4个LED资源实现跑马灯程序。
3.*功能描述: Tiny6410用下面4个引脚连接了LED发光二极管,分别是4.* GPK4--LED15.* GPK5--LED26.* GPK6--LED37.* GPK7--LED48.* 本程序将控制这四个管脚的输出电平,实现跑马灯的效果9.*日期: 2011-3-1010.*作者:国嵌11.**********************************************************/12.#include "def.h"13.#include "gpio.h"14.15.#define LED1_ON ~(1<<4)16.#define LED2_ON ~(1<<5)17.#define LED3_ON ~(1<<6)18.#define LED4_ON ~(1<<7)19.20.#define LED1_OFF (1<<4)21.#define LED2_OFF (1<<5)22.#define LED3_OFF (1<<6)23.#define LED4_OFF (1<<7)24.#define LEDALL_OFF (0xf<<4)25.26.//GPIO27.#define GPIO_BASE (0x7F008000)28.//oGPIO_REGS类型在 gpio.h 中定义29.#define GPIO (( volatile oGPIO_REGS *)GPIO_BASE)30.31.//函数声明32.void delay(int times);33.void LedPortInit(void);34.void LedRun(void);35.36./*37. * 程序入口38. * */39.int main(void)40.{41. LedPortInit();42. LedRun();43.}44.45./*46. * 延时函数47. * */48.void delay(int times)49.{50.int i;51.for(;times>0;times--)52.for(i=0;i<3000;i++);53.}54.55./*56. * 初始化连接LED灯的管脚资源57. * @ 通过将GPIO_BASE强制转化为(volatile oGPIO_REGS*)型的指针可以很方便58. * 的访问各个GPIO寄存器的值,这种方法比通过使用寄存器地址的宏定义访问59. * 寄存器单元更加规范和科学。
大功率LED恒流驱动电路的设计分析与实例
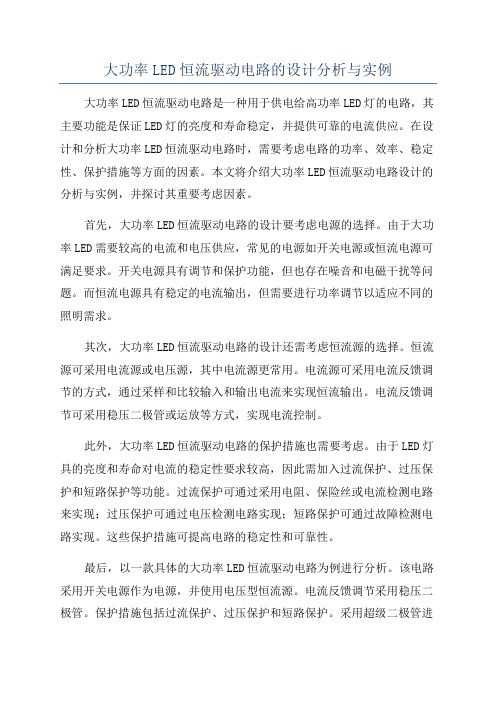
大功率LED恒流驱动电路的设计分析与实例大功率LED恒流驱动电路是一种用于供电给高功率LED灯的电路,其主要功能是保证LED灯的亮度和寿命稳定,并提供可靠的电流供应。
在设计和分析大功率LED恒流驱动电路时,需要考虑电路的功率、效率、稳定性、保护措施等方面的因素。
本文将介绍大功率LED恒流驱动电路设计的分析与实例,并探讨其重要考虑因素。
首先,大功率LED恒流驱动电路的设计要考虑电源的选择。
由于大功率LED需要较高的电流和电压供应,常见的电源如开关电源或恒流电源可满足要求。
开关电源具有调节和保护功能,但也存在噪音和电磁干扰等问题。
而恒流电源具有稳定的电流输出,但需要进行功率调节以适应不同的照明需求。
其次,大功率LED恒流驱动电路的设计还需考虑恒流源的选择。
恒流源可采用电流源或电压源,其中电流源更常用。
电流源可采用电流反馈调节的方式,通过采样和比较输入和输出电流来实现恒流输出。
电流反馈调节可采用稳压二极管或运放等方式,实现电流控制。
此外,大功率LED恒流驱动电路的保护措施也需要考虑。
由于LED灯具的亮度和寿命对电流的稳定性要求较高,因此需加入过流保护、过压保护和短路保护等功能。
过流保护可通过采用电阻、保险丝或电流检测电路来实现;过压保护可通过电压检测电路实现;短路保护可通过故障检测电路实现。
这些保护措施可提高电路的稳定性和可靠性。
最后,以一款具体的大功率LED恒流驱动电路为例进行分析。
该电路采用开关电源作为电源,并使用电压型恒流源。
电流反馈调节采用稳压二极管。
保护措施包括过流保护、过压保护和短路保护。
采用超级二极管进行过压保护,电源采用恒定输出电压的可调模式。
过流保护采用电流检测电路,通过检测电流超过一定值时,自动切断电源。
短路保护采用故障检测电路,通过检测负载端是否接通来实现。
在实际应用中,大功率LED恒流驱动电路的设计还需考虑效率问题。
高效率的恒流驱动电路可以减少能源消耗和热量产生,提高整个LED照明系统的效率。
单片机 直接驱动 led

单片机直接驱动LED的步骤如下:
1. 确定LED的连接方式:通常,LED的阳极和阴极分别连接到单片机的P0端口和GND端口。
2. 确定LED的控制方式:可以通过控制P0端口的电平来控制LED的亮灭。
如果要点亮一个LED,需要给P0端口发送一个低电平信号。
3. 编写程序:根据需要,使用C语言编写单片机程序,控制P0端口的电平来点亮或熄灭LED。
4. 编译程序:将编写好的程序编译成二进制代码。
5. 下载程序:将编译好的二进制代码下载到单片机中。
6. 运行程序:给单片机供电,程序开始运行,控制P0端口的电平来点亮或熄灭LED。
需要注意的是,不同的单片机型号和不同的LED连接方式可能会有所不同,具体操作应根据实际情况进行调整。
此外,在连接LED时,应确保阳极和阴极正确连接,避免短路或断路。
发光二极管LED驱动设计参考案例及选型指导

飞兆半导体 FAN5609 三态泵式背光源驱动(4×20mA 80mA PDA、DSC、MP3 Players FAN5609 驱动器如何在 LED 之间提供电流匹配,而无需使用限流电阻。唯一缺点是每个 LED 都需要连接到驱动器。 并非所有并联 LED 驱动器都需要升压电路。白光 LED 需要的正向电 压相对较高。最新的技术趋势是将该电压降低-低于 3V。
暗的功能。
飞兆半导体 FAN5611/12/13/14 PDA/MP3 等低端 LED 背光源应用 IC。FAN5613 是 FAIRCHILD 公司生产的低压差白色 LED 驱动器,能并联驱动 4 个白色 LED。 主要特点:压差小于 300mV;4 个并联的 LED 电流匹配,差值<±3%;无需外围元件来匹配 4 个 LED 的均流;每个 LED 最大电流可达 40mA;有 EN 端可实现关闭,关闭状态时耗电<1μA; 并且可输入 PWM 信号实现 LED 的亮度调节;小尺寸 8 管脚 SC-70 封装;工作温度-40~+85℃。
LED 屏幕现状
2006 年度销售亿元以上企业
• 上海三思科技发展有限公司 • 南京洛普股份有限公司
• 南京汉德森电子有限公司 • 北京利亚得电子科技有限公司 • 北京世纪澄通电子有限公司 • 惠州德赛光电科技有限公司 • 京东方智能显示技术有限公司 • 深圳市锐拓显示技术有限公司 • 深圳市蓝普科技有限公司 • 深圳市普耐光电科技有限公司 • 深圳联创健和光电有限公司
Tiny210 led驱动程序设计
一.Tiny210 led驱动程序设计总述在Tiny210实验板设备上,Led灯是由GPIO J2的数据线0-3来直接驱动的,低电平有效。
因此驱动程序的硬件配置,就是要使GPIO J2作为输出io口,并且通过输出的数据寄存器,来控制输出电平的高低。
Led设备是字符设备,但在这里我们将其设计为比较简单的杂项设备。
杂项设备主设备号统一为10;次设备号由Linux内核分配。
我们可以在/proc/misc中查看系统中的杂项设备。
另外,杂项设备的设备节点由系统自动分配,我们不需自己创建,只要指定设备名称即可。
应用程序可直接通过设备名称来访问设备节点。
我们这里把led驱动作为一个动态加载的内核模块来设计。
测试时,需要用insmod动态添加到系统内核。
由于Tiny210的缺省Linux内核中,有一个led的驱动程序在运行,所以我们需要先将其停止,这样才能看到自己的led驱动的效果。
具体就是在友善之臂的应用程序组中,有一个“LEDs”程序,启动其之后,点击“stop led-player”。
二.Tiny210 Led硬件设计与GPIO初始化说明要写led的设备驱动,首先要了解其硬件电路的设计,才能使之正常工作。
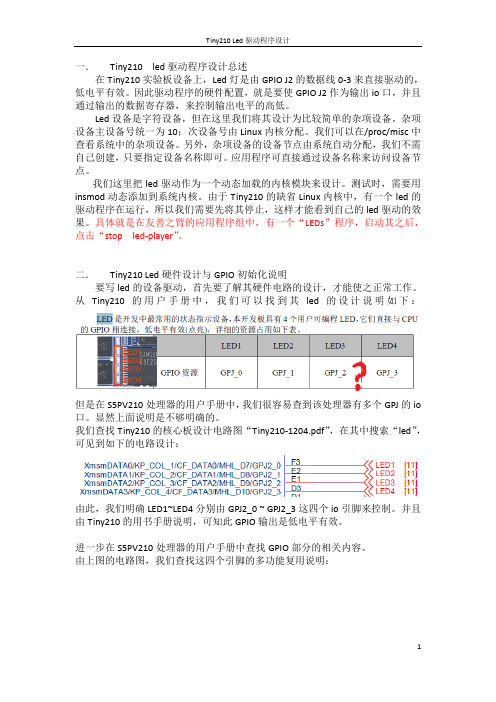
从Tiny210的用户手册中,我们可以找到其led的设计说明如下:但是在S5PV210处理器的用户手册中,我们很容易查到该处理器有多个GPJ的io 口。
显然上面说明是不够明确的。
我们查找Tiny210的核心板设计电路图“Tiny210-1204.pdf”,在其中搜索“led”,可见到如下的电路设计:由此,我们明确LED1~LED4分别由GPJ2_0 ~ GPJ2_3这四个io引脚来控制。
并且由Tiny210的用书手册说明,可知此GPIO输出是低电平有效。
进一步在S5PV210处理器的用户手册中查找GPIO部分的相关内容。
由上图的电路图,我们查找这四个引脚的多功能复用说明:然后查找其引脚分布图:我们可以确认这四个引脚在处理器封装的准确位置D3、E1、E2和F3:当然,其实在本驱动设计中完全可以不考虑其具体的电路连接,只需要知道是GPJ2_0 ~ GPJ2_3这四个io信号线即可。
led恒流驱动设计方案

led恒流驱动设计方案LED恒流驱动是一种将恒定电流通过LED芯片,从而使LED灯具能够稳定工作的驱动电路。
为了设计出高效、稳定的LED恒流驱动器,以下是一种设计方案。
首先,选择合适的LED恒流驱动芯片。
根据所需的电流和电压范围,选择具有恒流输出功能的驱动芯片。
同时,考虑芯片的工作频率和效率,以确保能够满足LED灯具的要求。
其次,设计电流检测电路。
电流检测电路能够实时检测LED电流的大小,并将其反馈给驱动芯片,从而实现恒流输出。
可以使用电流传感器或电阻来检测电流,然后将检测到的电流信号通过放大电路和滤波电路处理,最终送到驱动芯片。
然后,设计驱动电路。
驱动电路主要包括功率开关和滤波电路。
功率开关通过控制开关管的导通和截止,来调节输出电流的大小。
滤波电路则用于平滑输出电流,避免过大的脉动。
另外,设计过温保护电路。
由于LED的工作温度较高,过热会影响LED的寿命和稳定性。
因此,通过加入温度传感器和过温保护电路,可以在LED温度超过一定阈值时,自动降低输出电流或关断驱动电路,以保护LED的工作稳定性和寿命。
最后,进行整体电路设计和布线。
根据驱动芯片的引脚功能和特性,将各个功能电路按照一定的布线规则进行连接,并保证信号和电源的稳定性和可靠性。
在实际设计中,还需要考虑其他因素,比如输入电压范围、功率因素、EMI(电磁干扰)等。
同时,还要注意选用合适的元器件,比如电感、电容、二极管等。
此外,严格遵守安全标准,确保产品的安全性。
总之,LED恒流驱动设计方案需要综合考虑电流检测、驱动电路、过温保护和整体电路设计等多个因素。
通过合理选择元器件、合理布线和符合相关标准的设计,可以设计出高效、稳定、安全的LED恒流驱动器。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
7.4 实例—LED驱动程序的设计
该实例采用静态加载的方式把驱动加载进内核。
LED由CPU的GPIO(通用可编程IO接口)控制。
GPIO一般有两组寄存器:一组控制寄存器和一组数据寄存器。
控制寄存器可以设置GPIO接口的工作方式为输入或输出。
当引脚为输出时,向数据寄存器的对应位写入1或0,分别在引脚上产生高低电平,对LED、BELL的控制就是这样;当引脚设置为输入时,读取数据寄存器的对应位,可获得引脚上的响应电平信号,按键操作就是这样。
编写LED驱动程序,主要是编写对LED对应的GPIO 接口进行操作的函数,还包括定义的设备操作的结构体。
1.LED驱动程序s3c2440_leds.c的源码如下
#include <linux/conf ig.h>
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/f s.h>
#include <linux/init.h>
#include <linux/devf s_f s_kernel.h>
#include <linux/miscdevice.h>
#include <linux/delay.h>
#include <asm/irq.h>
#include <asm/arch/regs-gpio.h>
#include <asm/hardware.h>
#def ine DEVICE_NAME "leds" //定义设备名
#def ine LED_MAJOR 231 //定义主设备号,在定义自己的设备号时,不要和系统中原有的设备号冲突
static unsigned long led_table [] = { //定义要操作的设备,把每一个LED作为结构体的一个成员
S3C2410_GPF3,
S3C2410_GPF4,
S3C2410_GPF5,
S3C2410_GPF6,
S3C2410_GPF7,
};
static unsigned int led_cf g_t able [] = { //对设备进行设置,结构体的每一个成员是对对应LED的设置
S3C2410_GPF3_OU TP,
S3C2410_GPF4_OU TP,
S3C2410_GPF5_OU TP,
S3C2410_GPF6_OU TP,
S3C2410_GPF7_OU TP,
};
//设备驱动程序中对设备的I/O通道进行管理的函数,用来实现对LED的操作static int s3c2440_leds_ioctl(struct inode *inode, struct f ile *f ile, unsigned int cmd, unsigned long arg)
{
switch(cmd) {
case 0:
case 1:
if (arg > 4) {
return -EINVAL;
}
s3c2410_gpio_setpin(led_table[arg], !cmd);
return 0;
def ault:
return -EINVAL;
}
}
static struct f ile_operations s3c2440_leds_f ops = {
.owner = THIS_MODULE,
.ioctl = s3c2440_leds_ioctl,
};
static int __init s3c2440_leds_init(void) //模块加载函数
{
int ret;
int i;
ret = register_chrdev(LED_MAJOR, DEVICE_NAME, &s3c2440_leds_fops); //注册设备号
if (ret < 0) {
printk(DEVICE_NAME " can't register major number\n");
return ret;
}
2.采用静态加载的方式把驱动加载进内核
(1)修改Makefile和Kconfig文件
将s3c2440_leds.c放在内核的drivers/char目录中,修改该目录下的Makefile和Kconfig
(2)配置、编译内核
配置、编译内核的方法见第5章。
3.在/dev目录下添加设备文件
上层如果要访问内核驱动模块,还需要在/dev目录下添加设备文件,可以使用mknod 命令创建一个设备文件,命令如下:
4.编写该驱动的测试程序leds_test.c ,代码如下
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/ioctl.h>
#include <termios.h>
#include <sys/stat.h>
#include <f cntl.h>
#include <sys/time.h>
int main()
{
int on=1;
int led;
int f d;
f d = open("/dev/leds", 0);
if (f d < 0) {
perror("open device leds");
exit(1);
}
printf("leds test show. press ctrl+c to exit \n");
while(1){
f or(led=0;led<5;led++){
ioctl(f d, on, led);
usleep(50000);
}
on=!on;
}
close(f d);
return 0;
5.交叉编译leds_test.c,并且进行测试
用交叉编译器编译器编译leds_test.c,生成二进制可执行代码文件leds_test,下载到开发板执行。
在目标系统中执行如下命令进行测试。