姿态传感器温度补偿方法研究
传感器零点温度漂移补偿方法研究现状综述
传感器零点温度漂移补偿方法研究现状综述传感器零点温度漂移补偿方法是传感器技术中的重要研究领域之一、由于环境温度的变化会导致传感器输出的零点偏移,因此准确补偿此偏移对于保证传感器的精度和可靠性至关重要。
本综述将对零点温度漂移补偿方法的研究现状进行梳理和总结。
目前,对传感器零点温度漂移的补偿方法主要包括硬件补偿和软件补偿两种方法。
硬件补偿方法主要通过采用温度补偿元件来抵消传感器零点漂移。
常见的硬件补偿方法包括温度传感器的集成、热电偶的应用和电压参考源的温度补偿等。
温度传感器的集成使用与传感器相同的芯片工艺,将温度传感器与待测信号传感器集成在同一芯片上,通过同时测量温度和待测信号来进行零点温度漂移补偿。
热电偶的应用方法将热电偶连接到传感器上,测量环境温度,并根据测量结果来对传感器的输出进行零点补偿。
电压参考源的温度补偿方法通过在电压参考源中引入温度传感器,测量温度,并根据温度变化对电压参考源进行调整。
软件补偿方法主要通过数学算法对传感器输出进行处理,以实现零点漂移的补偿。
常用的软件补偿方法有多点标定法、曲线拟合法和多项式一致性法等。
多点标定法通过在多个温度点上对传感器输出进行标定,建立温度和输出之间的关系曲线,进而根据当前的温度来计算出零点补偿值。
曲线拟合法和多项式一致性法则是通过对标定数据进行曲线拟合或多项式拟合,从而得到温度和输出之间的数学模型,以实现零点补偿。
此外,还有一些改进的补偿方法被提出来,如自适应补偿方法、神经网络补偿方法和模糊逻辑补偿方法等。
自适应补偿方法通过实时测量环境温度来自动调整偏移补偿值,具有较好的实时性和动态性。
神经网络补偿方法通过训练神经网络来建立传感器输出与环境温度之间的映射关系,并通过神经网络的输出来进行零点补偿。
模糊逻辑补偿方法则是使用模糊逻辑推理来建立传感器输出和环境温度之间的关系,并通过模糊规则的推理来实现零点补偿。
总之,传感器零点温度漂移补偿方法已经取得了很大的进展。
传感器温度补偿技术
似补 偿 ,如 热 电偶 的参考 端 补偿 。热 电偶 的参 考 端
处 理热 电偶 工作 时 ,必 须保 持冷 端温 度恒 定 ,并 且 热 电偶 的分 度表 是 以冷端 温度 为 O  ̄ C作 出的 。 因在 工程 测 量 中冷端 距 离热源 近 ,且暴 露 于 空气 中 ,易 受被 测 对象温 度 和环 境温 度 波动 的影 响 ,使冷 端温 度难 以恒定 而产 生测 量误 差 。为 了消 除这 种误 差 ,
精 密制 造 与 自动化
2 0 1 5 年第 1 期
传感器温度补偿技术
李玉华 李永飚 马 林
河 南南 阳 4 7 3 0 0 9 ) ( 河 南工 业职 业技 术 学 院
摘 要
用温度补偿来抑制环境温度对传感器特性 的影响,主要采用温度 自补偿法 、并联式温度补偿 、电桥的温
度 补偿 、热敏电阻温 度补偿、反馈 式温 度补偿 。采用 负的温度系数热敏 电阻进行补偿 ,可 以抵消 由于温度变化产
四线制 接法 来 消除 引线 电阻 随环境 温度 变化 造成 的
47
精密 制造 与 自动 化
2 0 1 5 年第 1 期
测量 误差 。在 应用 中可 以安装 多个 应变 片 以达到温 补偿 和提 高测 量灵 敏度 的双 重 目的 ,差 动 电桥温 度 误差 补偿 法 ,在等 强度悬 臂 梁 的上 下表 面对 应位 置 粘贴 4片 相 同的应 变片 并接 成全桥 ,没梁 受压 时两 个应 变受 拉应 变 , 电阻增加 ,另两 个 应变 片受压 应 变 , 电阻减 小 。当温度 变化 时 ,引起 4片应 变 片 电
温 。补偿 导线 法 ,采用 补偿 导 线将热 电偶延伸 到温
度 恒 定或温 度 波动 较小 处 。
一种传感器温度补偿方法
一种传感器温度补偿方法
哎呀,你知道吗,今天我要给你讲讲一种超厉害的传感器温度补偿方法!
就好比你在大冬天,穿着单薄的衣服会觉得冷得受不了吧,这时候要是给你一件厚厚的棉袄,哇塞,是不是马上就暖和起来了呀!传感器也是一样的呀!当它受到温度变化影响时,就好比人在寒冷环境中一样,数据可能就不那么准确啦!那这个温度补偿方法呢,就像是给传感器穿上了那件保暖的棉袄!
比如说在工业生产中,传感器在高温环境下可能就有点“懵”啦,这时候用了这种补偿方法,嘿!它马上又能精准地工作啦!就像给它打了一针“清醒剂”似的。
再比如在科学实验里,要是没有这厉害的温度补偿方法,那得出的数据可能就像乱了套的线团,让人摸不着头脑呀!
我跟你说哦,这种方法真的太重要啦!它能让传感器在各种温度条件下都能靠谱地干活!简直就是传感器的大救星呀!所以呀,一定要好好掌握这种传感器温度补偿方法,它可真是个宝贝呢!
我的观点:这种传感器温度补偿方法具有极大的实用价值和重要意义,值得深入研究和广泛应用。
传感器 温度补偿 计算方法
传感器温度补偿计算方法嘿,咱今儿就来说说传感器、温度补偿还有计算方法。
你想啊,传感器就像咱的小侦探,到处去感知各种信息呢。
它能察觉到好多细微的变化,然后把这些信息传递给我们。
那温度补偿呢,就好比是给这个小侦探穿上了一件合适的衣服。
为啥这么说呀?你想想看,温度的变化有时候会影响传感器的准确性呀。
就好像人在不同温度下状态也不一样,热了可能就烦躁,冷了可能就缩手缩脚的。
传感器也一样啊,温度一变,它可能就不那么灵光了。
那怎么给它穿上这件合适的“衣服”呢,这就得靠计算方法啦。
这计算方法就像是一个神奇的魔法棒,能让传感器在不同温度下都能保持精准。
比如说,我们可以通过一些公式,把温度的影响考虑进去,然后调整传感器的输出,让它变得更可靠。
就好比你走路,路不平坦的时候,你得调整自己的步伐和姿势吧,不然不就容易摔跟头啦。
传感器也是这样,温度变化就是那不平坦的路,计算方法就是调整步伐和姿势的方法。
你说这温度补偿和计算方法重要不重要?那肯定重要啊!没有它们,传感器可能就会给出一些不靠谱的结果,那我们可就被误导啦。
就好像你要去一个地方,导航给你指错了路,那你不就白跑冤枉路啦。
而且啊,这计算方法还得不断改进和完善呢。
随着科技的发展,对传感器的要求也越来越高呀。
就像我们的生活水平提高了,对各种东西的要求也高了一样。
以前能吃饱就行,现在还得吃得健康、美味。
传感器也是,以前能测个大概就行,现在得测的特别准才行。
那怎么改进计算方法呢?这就得靠科学家们的智慧啦。
他们得不断研究、试验,找出更好的办法来。
这可不是一件容易的事啊,得花费好多时间和精力呢。
但一旦成功了,那可就太棒啦,能让传感器发挥更大的作用呢。
你想想,如果传感器能更精准地测量温度,那对我们的生活得多有帮助啊。
比如在医疗领域,能更准确地监测病人的体温;在工业生产中,能更好地控制温度,提高产品质量。
所以啊,咱可别小看了这传感器、温度补偿和计算方法。
它们就像是一个团队,互相配合,才能发挥出最大的作用。
微型航姿系统中磁传感器温度漂移补偿研究
d i o e s t n mo e a f ciey r d c h ro u o tmp r t r f g o g ei e s r n h r c mp n ai d l c n ef t l e u e te e r d e t e e au e o e ma n t s n o s a d t e t f o e v c
a d a r a・ me c mp n ain mo e a e n p ln mil a c l t n i e tb ih d a d u e n t e mir t t d n e lt o e s t d l s d o oy o a n e l i sa l e n s d i c o at u e i o b c ao s s h i
H N iu , I ogbn , I i —e A G Y ・ n L n -ig L U J ny j R a
( vg t nR sac e trN nigUnvri f rn ui n srn ui , a j g2 0 1 , hn ) Naiai eerhC ne , a j iesyo o a t sa dA t a t sN ni 10 6 C ia o n t Ae c o c n
rf r n e s se ha e iv siae ee e c y t m sbe n n e t td.Ba e n fe ue y p cr g s d o r q nc s e tum n lss o h o s a b n so i ia a ay i n t e n ie, a d— tp d gtl i e sde ine o rdu e t fe to ie Th ea in ewe n e f tr i sg d t e c he efc fnos . e r lto s b t e tmpe au e n e s ro p s i e e td l rt r s a d s n o utut spr s n e
基于Kalman滤波算法的姿态传感器运动补偿方法研究
基于Kalman滤波算法的姿态传感器运动补偿方法研究贾培刚;李明哲【摘要】为了消除姿态传感器在检测过程中可能会出现随着运动加速度的变化而产生测量误差的现象,提出了基于Kalman滤波算法的姿态传感器加速度补偿方法.详细介绍了传感器工作原理以及运动状态下的误差分析及补偿.该方法通过将姿态传感器在运动过程中出现的角速度进行误差处理,建立传感器运动线性方程,在此基础上,采用Kalman滤波算法,通过对传感器测量输入的姿态角进行修正,从而达到姿态角准确测量的目的.通过实验数据及仿真分析表明,经过Kalman滤波算法对姿态传感器的运动进行误差补偿后的运动特性输出精度,相比补偿前有了很明显的提高,达到所需精度要求.【期刊名称】《制造业自动化》【年(卷),期】2015(037)024【总页数】3页(P41-43)【关键词】姿态传感器;角速度误差;Kalman滤波算法;运动特性【作者】贾培刚;李明哲【作者单位】西安工业大学机电工程学院,西安 710021;西安工业大学机电工程学院,西安 710021【正文语种】中文【中图分类】TN919.40 引言随着微电子机械系统(MEMS)技术在微电子、材料、力学、化学、机械学诸多学科领域获得越来越广泛的普及,从而基于MEMS技术的传感器得到越来越多的应用[1]。
由于此类传感器具有体积小、精度高、可靠性优良等优点,在材料工程、电子信息产品、机械制造等领域得到广泛的应用,但由于姿态传感器在运动过程中的误差对其造成误差干扰降低其精度,因此对姿态传感器运动补偿方法的研究变得非常重要[2]。
其中基于MEMS姿态传感器主要用于对载体运动过程中倾斜角变化的测量与稳定,但是由于倾斜角角度和运动速度的改变,就会导致其输出值及测量结果的改变[3],所以必须采取相应方法消除或抑制在运动过程中传感器产生的倾斜角误差以及速度误差,对姿态传感器进行运动误差补偿。
姿态传感器的运动补偿可以通过硬件补偿和软件补偿两种方法实现[4]。
基于数字式红外传感器的姿态测量盲区补偿法
.
W AN G J i a ,L I J i a n ( K e y L a b o r a t o r y f o r E l e c t r o me c h a n i c a l C o n t r o l , I n n e r Mo n g o u a Un i v e r s i t y o f T e c h n o l o g y , Ho h h o t 0 1 0 0 5 1 , C h i n a )
知这一差异 J 。本文设计采用基于“ 塞 贝克效应 ” 的数字 式 热电堆红外传感器 , 该传感 器通过 其圆锥形视 窗探 测天 空和地面等环境辐射为 5 . 5~ 1 4 p . m波长 的红外线能量 , 输 出一个 相应 的温度值。 在 同轴 的相 反方向安装 2只完全相 同 的红外传 感器 , 飞行器处 于水平 状态 时 , 2只红外 传感 器 的圆锥形 视场 内 朝 向天空和朝 向大地 的 区域 相等 , 此时两 传感器输 出温度 差为 0 ; 而 当飞行器发生倾斜 时 , 偏 向大地的红外传感 器输
2 0 1 4年 第 3 3卷 第 1 期
传感器与微系统 ( T r a n s d u c e r a n d Mi c r o s y s t e m T e c h n o l o g i e s )
1 5
高分多线阵卫星姿态热变形误差的无控制点补偿机理研究
高分多线阵卫星姿态热变形误差的无控制点补偿机理研究高分多线阵卫星姿态热变形误差的无控制点补偿机理是卫星姿态控制系统中一个重要的问题。
随着遥感技术的发展,高分多线阵卫星在地球观测中发挥着重要作用,然而,由于卫星环境和热效应等因素的影响,卫星姿态系统可能出现误差,影响卫星的观测精度和数据质量。
因此,研究高分多线阵卫星姿态热变形误差的无控制点补偿机理,对提高卫星观测能力具有重要意义。
高分多线阵卫星姿态热变形误差的无控制点补偿机理研究,首先需要对卫星的姿态控制系统进行深入了解。
卫星姿态控制系统主要由姿态传感器、姿态控制器和执行机构组成,其目的是保持卫星在飞行轨道上的姿态稳定。
然而,由于卫星在轨运行过程中受到多种外部因素的影响,如太阳辐射、地球引力等,会导致卫星姿态发生变化,从而产生误差。
其中,热效应是影响卫星姿态的重要因素之一。
热效应是指卫星在轨运行过程中由于太阳辐射的作用而产生的热变形现象。
随着卫星的运行轨迹和太阳的角度变化,卫星不同部位的温度分布不均匀,导致卫星结构产生变形,进而影响卫星的姿态稳定性。
尤其是在高分多线阵卫星这类大型卫星中,由于结构复杂性和热敏感性较高,其姿态热变形误差更加显著,对卫星观测精度产生较大影响。
因此,研究姿态热变形误差的无控制点补偿机理对解决这一问题具有重要意义。
在研究高分多线阵卫星姿态热变形误差的无控制点补偿机理过程中,需要深入探讨卫星的热动力学特性和姿态控制系统的工作原理。
热动力学特性是指卫星在受热作用下的动力学响应规律,包括热变形速度、热响应时间等参数。
而姿态控制系统的工作原理则是指姿态传感器对卫星姿态的检测和姿态控制器对姿态误差的调节过程。
通过分析这些因素,可以全面了解高分多线阵卫星姿态系统在热环境下的表现特点,为补偿机理的研究奠定基础。
另外,研究高分多线阵卫星姿态热变形误差的无控制点补偿机理还需要建立相应的数学模型和仿真实验平台。
数学模型是对卫星姿态系统各部件的动态特性进行描述和分析的数学方法,通过建立数学模型可以模拟卫星在热环境下的姿态变化过程,揭示热变形误差的产生机理。
浅谈传感器的温度补偿技术

浅谈传感器的温度补偿技术摘要:从原理上论述了温度对传感器性能的影响,包括零点漂移、灵敏度随温度的变化。
介绍了温度补偿的方法,提出了利用单片机进行温度补偿,实验结果表明,该温度补偿是一种行之有效的方法。
关键词:传感器;温度误差;灵敏度:补偿技术1 引言传感器广泛应用于各种工农业生产实践中,一切科学研究和生产过程要获取信息都要通过其转换为易传输与处理的电信号,但大多数传感器的敏感元件采用金属或半导体材料,其静特性与环境温度有着密切的联系。
实际工作中由于传感器的工作环境温度变化较大,又由于温度变化引起的热输出较大,将会带来较大的测量误差;同时,温度变化也影响零点和灵敏度值的大小,继而影响到传感器的静特性,所以必须采取措施以减少或消除温度变化带来的影响,即必须进行温度补偿。
2 温度补偿技术在传感器的应用中,为使传感器的技术指标及性能不受温度变化影响而采取一系列具体技术措施,称为温度补偿技术.一般传感器都在标准温度(20+5)℃下标定,但其工作环境温度也可能由零下几十摄氏度升到零上几十摄氏度。
传感器由多个环节组成。
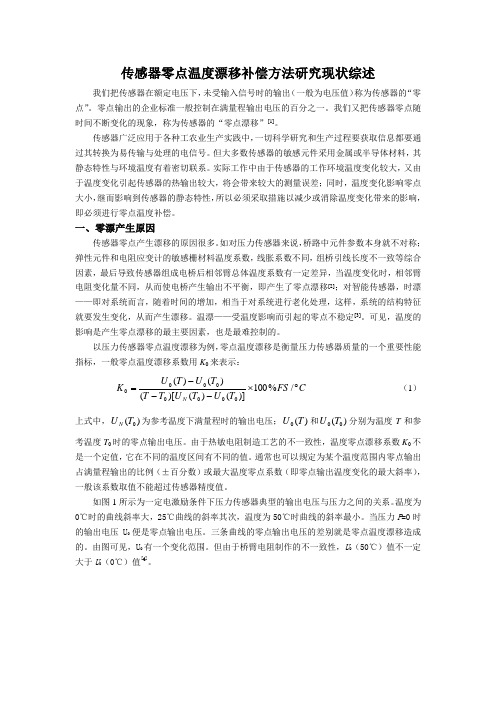
尤其是金属材料和半导体材料制成的敏感元件,其静特性与温度有着密切的关系.信号调理电路的电阻、电容等元件特性基本不随温度变化,必须采取有效措施以抵消或减弱温度变化对传感器特性造成的影响. 2.1 温度误差灵敏度温度误差灵敏度是指传感器输出变化量与引起该输出量变化的温度变化量之比,即St=эy/эT,显然传感器的S越小,适应环境温度变化的能力越强,其温度附加误差就越小.环境温度T对传感器输出的影响如图1所示,传感器的输出y是输入被测量x、环境温度T的函数,即y=f(x,T)。
当传感器的输出y与输入x之间为线性关系时,则有式中,a0(T)是传感器的零位输出;a1(T)是传感器的灵敏度。
这时,传感器的温度误差灵敏度St为:从式(2)看出两项组成,前者为传感器零位输出温度误差灵敏度,其大小反映传感器零点随温度漂移的快慢;后者为传感器输出特性曲线的斜率(即灵敏度)的温度误差灵敏度,其大小反映传感器量程随温度变化的快慢.当传感器的输出与输入之间为非线性关系时,这种关系可用有限项的幂函数近似表示为:这时,传感器的温度灵敏度为:因此,为降低温度变化对传感器工作造成影响,应设法减小温度误差灵敏度。
传感器零点温度漂移补偿方法研究现状综述
传感器零点温度漂移补偿方法研究现状综述我们把传感器在额定电压下,未受输入信号时的输出(一般为电压值)称为传感器的“零点”。
零点输出的企业标准一般控制在满量程输出电压的百分之一。
我们又把传感器零点随时间不断变化的现象,称为传感器的“零点漂移”[1]。
传感器广泛应用于各种工农业生产实践中,一切科学研究和生产过程要获取信息都要通过其转换为易传输与处理的电信号。
但大多数传感器的敏感元件采用金属或半导体材料,其静态特性与环境温度有着密切联系。
实际工作中由于传感器的工作环境温度变化较大,又由于温度变化引起传感器的热输出较大,将会带来较大的测量误差;同时,温度变化影响零点大小,继而影响到传感器的静态特性,所以必须采取措施以减少或消除温度变化带来的影响,即必须进行零点温度补偿。
一、零漂产生原因传感器零点产生漂移的原因很多。
如对压力传感器来说,桥路中元件参数本身就不对称;弹性元件和电阻应变计的敏感栅材料温度系数,线胀系数不同,组桥引线长度不一致等综合因素,最后导致传感器组成电桥后相邻臂总体温度系数有一定差异,当温度变化时,相邻臂电阻变化量不同,从而使电桥产生输出不平衡,即产生了零点漂移[2];对智能传感器,时漂——即对系统而言,随着时间的增加,相当于对系统进行老化处理,这样,系统的结构特征就要发生变化,从而产生漂移。
温漂——受温度影响而引起的零点不稳定[3]。
可见,温度的影响是产生零点漂移的最主要因素,也是最难控制的。
以压力传感器零点温度漂移为例,零点温度漂移是衡量压力传感器质量的一个重要性能指标,一般零点温度漂移系数用K 0来表示:C FS T U T U T T T U T U K N ︒⨯---=/%100)]()()[()()(00000000 (1) 上式中,)(0T U N 为参考温度下满量程时的输出电压;)(0T U 和)(00T U 分别为温度T 和参考温度T 0时的零点输出电压。
由于热敏电阻制造工艺的不一致性,温度零点漂移系数K 0不是一个定值,它在不同的温度区间有不同的值。
用于光纤光栅传感器温度补偿方法的研究

用于光纤光栅传感器温度补偿方法的研究一、光纤光栅传感器的那些事儿。
光纤光栅传感器可老厉害了,它在好多领域都有用武之地呢。
就像在桥梁监测中,能知道桥梁的各种状态;在航空航天里,也能监测飞机或者航天器的一些参数。
但是呢,它有个小麻烦,就是温度会影响它的测量结果。
温度一变化,测量的数据就可能不准确啦。
这就好比一个超级灵敏的小耳朵,周围温度一波动,听到的声音就有点变样了。
二、为啥要进行温度补偿。
咱们想啊,如果光纤光栅传感器因为温度变化给出错误的数据,那在那些重要的应用里可就会出大问题了。
比如说在医疗设备里,如果传感器因为温度不准了,那医生可能就会得到错误的信息,这对病人可太危险了。
再比如说在工业生产线上,如果传感器数据错了,产品质量可能就没办法保证了。
所以啊,温度补偿就像是给传感器打个补丁,让它在温度变化的时候也能准确工作。
三、现有的一些温度补偿方法。
1. 参考光栅法。
这个方法就是再放一个光栅,这个光栅专门用来测量温度的变化。
就像有个小跟班,它只盯着温度。
然后根据这个参考光栅的温度数据,来调整主光栅传感器的数据。
不过呢,这个方法有点小麻烦,就是得额外放一个光栅,而且还得保证这个参考光栅测量温度特别准。
2. 材料特性补偿法。
有些材料啊,它们的特性会随着温度变化而变化,而且这种变化是有规律的。
咱们就可以利用这些材料和光纤光栅传感器组合起来。
比如说,当温度升高时,传感器的数据变化了,但是这种特殊材料也会有相应的变化,利用这个变化来抵消传感器因为温度带来的数据偏差。
但是找这种合适的材料也不是那么容易的,得经过好多试验才行。
四、新的温度补偿方法的探索方向。
1. 算法改进方向。
可以研究一些新的算法来处理温度对传感器的影响。
比如说,可以用机器学习的算法,让传感器自己学习温度变化和数据变化之间的关系。
就像教一个小宠物认路一样,让传感器慢慢学会在不同温度下怎么给出正确的数据。
不过这个算法得有好多的数据来训练,就像教小宠物得给它好多好吃的一样,得有足够的数据才能让算法变得准确。
霍尔效应式位移传感器的温度补偿

霍尔效应式位移传感器的温度补偿钦志伟;卢文科;左锋;冯阳【摘要】针对霍尔位移传感器温度漂移的问题,提出了一种基于粒子群优化算法与遗传算法优化最小二乘支持向量机(PSO-GA-LSSVM)的温度补偿新模型.该模型利用粒子群优化算法对最小二乘支持向量机中的惩罚因子和核函数进行优化选取,提高了模型的训练速度与准确度;并引入遗传算法中的变异思想,拓展模型的群搜索空间,提高了寻取更优值的概率.研究结果表明,补偿后该传感器的零位温度系数由1.25×10-2/℃减小到6.33×10-4/℃,其灵敏度系数由4.55×10-3/℃减小到4.22×10-4/℃,均提升了一个数量级,实现了对该传感器的温度补偿.【期刊名称】《传感技术学报》【年(卷),期】2019(032)007【总页数】5页(P1040-1044)【关键词】霍尔位移传感器;最小二乘支持向量机;粒子群优化算法;遗传算法;温度补偿【作者】钦志伟;卢文科;左锋;冯阳【作者单位】东华大学信息科学与技术学院,上海201620;东华大学信息科学与技术学院,上海201620;东华大学信息科学与技术学院,上海201620;东华大学信息科学与技术学院,上海201620【正文语种】中文【中图分类】TP393霍尔效应式位移传感器是基于霍尔效应把测量值转变为电学测量值的传感器,其频响快,工作可靠,寿命长,便于集成微型化[1]。
由于霍尔元件对温度敏感,其特性参数如输出霍尔电势、电路等效电阻等都会随之改变,导致传感器产生温度漂移。
因此必须对其进行温度补偿。
传统的温度补偿方法是硬件补偿,包括内补偿法与拼凑补偿法[2],但是存在电路复杂、精度低、效率低等缺点。
本文建立粒子群优化算法与遗传算法优化最小二乘支持向量机(PSO-GA-LSSVM)模型对该传感器进行温度补偿。
1 霍尔效应式位移传感器的工作原理如图1所示,霍尔效应产生的霍尔电动势方向与磁场和电流方向都相互垂直,前提是将半导体器件悬置于磁场内,且导通电流。
基于逆模型的温度传感器动态补偿方法
基于逆模型的温度传感器动态补偿方法本文介绍了一种基于逆模型的温度传感器动态补偿方法。
该方法通过建立温度传感器的逆模型,实现对传感器输出信号的动态补偿,从而提高传感器的测量精度和稳定性。
一、引言
温度传感器广泛应用于各种领域,如环境监测、工业控制等。
然而,传感器在测量过程中受到温度的影响,会导致测量误差。
因此,温度传感器的动态补偿技术一直是研究的热点之一。
二、基于逆模型的温度传感器动态补偿方法
1. 建立逆模型
首先,需要建立温度传感器的逆模型。
逆模型是指将传感器的输出信号转换为温度信号的模型。
可以通过对传感器进行标定,获取传感器输出信号与温度之间的对应关系。
2. 动态补偿
在实际测量过程中,传感器受到温度的影响会产生误差。
为了消除这种误差,需要对传感器的输出信号进行动态补偿。
动态补偿是指在测量过程中,实时对传感器的输出信号进行修正,使其更加准确地反映温度变化。
3. 实现方法
基于逆模型的温度传感器动态补偿方法可以采用多种实现方法,
如线性拟合、最小二乘法、神经网络等。
这些方法可以根据实际需求选择。
三、结论
基于逆模型的温度传感器动态补偿方法可以有效地提高传感器的测量精度和稳定性。
应变式传感器温度补偿常用方法
应变式传感器温度补偿常用方法
以下是 6 条关于应变式传感器温度补偿常用方法:
1. 硬件补偿法,这就好比给传感器穿上一件特制的“保暖衣”!比如说,在传感器电路中加入一些专门针对温度变化进行调整的元件,像电阻之类的。
“哎呀,这样不就能很好地应对温度变化对传感器的影响啦!”
2. 软件补偿法呀,就像是给传感器配备了一个超级智能的“大脑”!通过编写程序来分析和修正温度对应变式传感器的影响。
“你想想,这多牛啊,用软件的力量来克服温度难题!”
3. 自补偿法,它就好像传感器自己学会了怎么在不同温度下“照顾”自己!利用传感器自身的材料特性来实现温度补偿。
“哇塞,传感器自己就把问题解决了一部分,多厉害呀!”
4. 组合补偿法,这不就是把各种方法都请来一起“帮忙”嘛!将硬件补偿和软件补偿等结合起来,发挥各自的优势。
“那效果肯定是杠杠的呀,多种方法组合,温度还能奈我何?”
5. 零点温度补偿法,就像是给传感器找到了一个温度下的“平衡点”!专门针对零点的漂移进行补偿。
“嘿嘿,这样就能让传感器在低温和高温下都能准确工作啦!”
6. 灵敏度温度补偿法,这可以理解为让传感器的灵敏度不会被温度“带偏”!保证传感器在不同温度环境下测量的准确性。
“你说,有了这个方法,应变式传感器多踏实呀!”
我觉得这些温度补偿常用方法真的是应变式传感器能够稳定可靠工作的重要保障呢,每一种都有其独特的作用和价值,我们要根据具体情况灵活运用呀!。
ZTP135S_R红外传感器温度补偿算法的研究和应用
91-50-2102######### # # # # # # # # # # # # # # #91-50-2102# # # # # # # # # # # # # # # #########91-50-2102
。2 表见。 系关性线成度温和压电的出输, 内围范的温体量测在, 时 ℃ 52 为温室。Ω k 06 为 , 变不持保上 本基 )℃ 24�℃ 53 ( 内围范的温体量测在阻内的器感传堆电热外红出看以可 4 图从 。 来出导 推中 4 图在以可系关的间之压电出输和度温器感传堆电热。 )℃ 1 .0 ± ( 度精的高很到达以可法算字数 法方字数 2 .2 。 量测度温的体物同不合适来数倍大放 ] 01 [ 节调过通以可, 好性活灵是但,℃ 1 ± 在能只, 高不度精的来出量测, 值度温出算计法算偿补的上以据根 。0 为压电的出输器感传, 时同相度温境环和度温标目当, 度温标目出算计
导 推 法 方 字 数用 采, 上 础基的理原 温测和数参能 性的器感传度温堆电热外红 R - S 531PTZ 的司公EG 绍介在 : 要摘 院学程工息信学大技科南西 .2 ;483003 津天 系程工息信与子电院学设建市城津天 . 1 ( ) 010126 阳绵川四
2
靖 李 峰彩王 贵知刘
21 - 60 - 8002 : 期日稿收
。 证论验实了行进并, 法算偿补度温的器感传 R - S 531PTZ 于对的型新种一了出提者笔, 量测式触接非 的温体体人对现实它用利何如 , 器感传堆电热外红种一是器感传 R - S 531PTZ 的出提所文本。 度精的量 ]2[ 测到响影而 , 扰干的度温境环到受易极, 高很求要度温境环对, 法方量测的式触接非用采于由温测外红 。 仪温测线外红 Ⅰ - WHL 了发开心中 ]1[ 发开用应术技华合学大州兰 ; 仪温测外红了出制研也所究研理物海上院科中 ; 60 .0 达高率辨分其, 仪像图热 外 红 度温 体 人 ” 50 - WH 眼慧 “的出制研学大技科中华。 果成性段阶的喜可了得取, 仪测检温体外红的检筛 速 快人 病 ” 典非 “于用的格规种余 04 出制研共 , 关攻苦刻 、 作工勤 辛者作工技科表仪器仪的国我, 里月多个 、 观直示显 、 单简作操 、 短间时量测有具法方的温体量测他其 一的后生发典非在, 点优等害伤生产会不体人对 于对相法方的度温量测外红于由。 视重的们人到得, 度高的定一到升上也测监的度温体人于对, 全安命生的 体人到胁威重严 , 现出的典非年 3002 。 况状康健的己自注关加更们人, 高提量质活生, 展发的济经着随
处理压力数字传感器进行温度补偿的最优算法
处理压力数字传感器进行温度补偿的最优
算法
处理压力数字传感器进行温度补偿是一个重要的技术问题,它涉及到传感器性能的稳定性和准确性。
为了实现最优的温度补偿算法,我们需要考虑以下几个关键因素:传感器性能模型、数据采集、温度补偿算法设计和验证。
首先,了解传感器性能模型是关键。
每种类型的压力数字传感器都有其特定的性能模型,包括温度依赖性。
了解模型的特性可以
帮助我们预测和纠正由于温度变化而产生的误差。
其次,数据采集是温度补偿的基础。
我们需要从传感器获取足够的数据,包括温度信息。
这些数据应该能够反映实际的温度变化,以便我们能够进行准确的温度补偿。
接下来是温度补偿算法的设计。
一种常用的方法是使用插值算法,例如线性插值或三次样条插值。
这些算法可以根据当前温度和
压力值,预测在其它温度下的压力值。
此外,一些高级算法,如神
经网络或支持向量机,也可以用于更复杂的温度补偿问题。
最后,我们需要验证补偿算法的有效性。
通常,通过在各种温度条件下进行测试,并比较原始数据和经过补偿的数据,我们可以
评估算法的性能。
此外,还可以通过误差分析来量化算法的精度和
稳定性。
综上所述,处理压力数字传感器进行温度补偿的最优算法包括:
1. 了解并使用合适的传感器性能模型;
2. 准确采集温度和
压力数据; 3. 设计并实现有效的温度补偿算法,如插值算法或高
级机器学习算法; 4. 验证并优化补偿算法的有效性。
通过这些步骤,我们可以获得最佳的温度补偿效果,从而确保压力数字传感器的稳定性和准确性。
一种基于MEMS姿态传感器温度补偿方法
一种基于MEMS姿态传感器温度补偿方法随着微机电系统(MEMS)技术在微型化技术基础上,结合了电子、机械、材料等多种学科交叉融合的前沿科研领域的不断发展与成熟,从而出现了很多基于MEMS 技术的传感器,此类传感器具有体积小、重量轻、低功耗、多功能等优点,在电子产品、航空航天、机械化工等行业中得到了广泛应用。
传感器的温度补偿方法大致可以分为两种,即硬件补偿和软件补偿。
硬件补偿方法主要是改变电路来达到补偿效果,但是这种方法会导致电路的复杂化,同时提高了成本。
软件补偿方法主要有最小二乘法、BP 神经网络法、回归法等。
从计算的方便性和补偿精度的准确性两个方面,本文采取最小二乘法进行温度补偿。
1 姿态传感器的温度补偿原理本文采用美国InvenSense 公司生产的ITG3205 三轴陀螺仪芯片,该芯片中内嵌有数字输出温度传感器,因此可以随时检测出传感器所处的环境温度。
在不同的工作环境温度下,传感器实际角度输出值与理论角度输出值会出现一定的误差,称之为温度误差。
为了消除或者减少这种温度误差,利用最小二乘法进行曲线拟合,最终达到或接近理论角度输出值。
传感器根据输入的检测信号,通过姿态检测模块和温度检测模块采集相关数据,然后经过温度补偿模块进行相应的温度补偿,最后通过输出检测模块可得到预期的检测信号。
姿态传感器的温度补偿原理如框2 姿态传感器的温度补偿方法在同一温度下,不同角度的理论值与输出值之间严格意义上是一种非线性关系,但是由于这种误差值相对不大,可以近似的认为是一种线性关系,即y = mx + n 的线性关系。
通过最小二乘法进行线性拟合,可以得出参数m 和n。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
姿态传感器温度补偿方法研究
作者:贾培刚刘晓武武晓春
来源:《现代电子技术》2013年第20期
摘要:针对电子产品可能会出现随着环境温度的变化而产生测量误差的现象,在此选用姿态传感器在检测过程中出现这种误差的情况,提出了一种在软件方面利用最小二乘法进行温度补偿的方法。
该方法计算简单,补偿精度高。
通过实验数据验证表明,经过最小二乘法进行温度补偿后的检测精度,相比补偿前有了很大的提高。
因此在高精度技术要求的检测中,利用这种方法进行温度补偿后可精确地检测出载体的姿态角度。
关键词:姿态传感器;温度误差;温度补偿;最小二乘法
中图分类号: TN919⁃34; TP212.9 文献标识码: A 文章编号: 1004⁃373X(2013)
20⁃0118⁃03
0 引言
随着微机电系统(MEMS)技术在微型化技术基础上,结合了电子、机械、材料等多种学科交叉融合的前沿科研领域的不断发展与成熟,从而出现了很多基于MEMS技术的传感器,此类传感器具有体积小、重量轻、低功耗、多功能等优点,在电子产品、航空航天、机械化工等行业中得到了广泛应用。
其中基于MEMS姿态传感器主要用于载体姿态的调整和倾角的检测,但是由于工作环境温度的改变,就会导致测量精度的变化,在一些高精度检测的要求下,则失去其检测的效果,所以必须采取相应措施来消除或者减少随温度变化而引起的误差[1],即必须对传感器进行温度补偿。
传感器的温度补偿方法大致可以分为两种,即硬件补偿和软件补偿。
硬件补偿方法主要是改变电路来达到补偿效果[2],但是这种方法会导致电路的复杂化,同时提高了成本。
软件补偿方法主要有最小二乘法、BP神经网络法、回归法等。
从计算的方便性和补偿精度的准确性两个方面,本文采取最小二乘法进行温度补偿。
1 姿态传感器的温度补偿原理
本文采用美国InvenSense公司生产的ITG⁃3205三轴陀螺仪芯片,该芯片中内嵌有数字输出温度传感器,因此可以随时检测出传感器所处的环境温度。
在不同的工作环境温度下,传感器实际角度输出值与理论角度输出值会出现一定的误差,称之为温度误差。
为了消除或者减少这种温度误差,利用最小二乘法进行曲线拟合,最终达到或接近理论角度输出值。
传感器根据输入的检测信号,通过姿态检测模块和温度检测模块采集相关数据,然后经过温度补偿模块进行相应的温度补偿,最后通过输出检测模块可得到预期的检测信号。
姿态传感器的温度补偿原理如框图1所示。
2 姿态传感器的温度补偿方法
在同一温度下,不同角度的理论值与输出值之间严格意义上是一种非线性关系,但是由于这种误差值相对不大,可以近似的认为是一种线性关系,即[y=mx+n]的线性关系。
通过最小二乘法进行线性拟合,可以得出参数m和n的值。
此时可以发现,在不同的温度下,所拟合出来的m和n值是随温度的变化而变化的。
在此情况下,必须找出温度分别与m和n之间的关系,为此同样可以根据最小二乘法再次进行曲线拟合,从而得出m值与温度之间的关系。
同理也可以得出n与温度之间的关系。
经过两次曲线拟合之后,可以得出理论值与输出值之间的误差有了明显的减小,并且满足预期的要求。
在实际应用中,为了达到高精度检测的要求,可以通过测量多组数据进行曲线拟合的方法来实现。
3 姿态传感器的实验数据处理
由于各轴的检测原理是相同的,因此本论文采用x轴的检测数据进行实验验证。
主要的实验仪器有被测姿态传感器、经纬仪、高低恒温箱、高精度角度检测仪等。
表1所得数据是未经温度补偿时的实验数据,即原始数据。
表1 原始数据
3.1 第一次线性拟合
由于按照最小二乘法的基本步骤进行拟合的计算量比较大,所以本文采用Matlab进行数据处理,这样不但可以减少复杂的计算过程,而且还可以保证较高的计算精度。
例如在温度T=-30 °C的条件下,以理论角度x为自变量,输出角度y为因变量,根据线性关系式[y=mx+n],计算出参数m和n的值。
具体计算程序如下:
3.2 第二次曲线拟合
以参数m为因变量,温度t为自变量,根据曲线拟合式[mt=at2+bt+c],利用Matlab求出a,b,c的值,最终确定m与t的函数关系式。
同理,可求得n与t的函数关系式。
具体计算程序如下:
4 实验数据的验证
传感器未经温度补偿时的输出为[y=mx+n],即在t ℃时,无补偿输出为:
由于在实际检测过程中,被检测量为偏移角度,则理论角度应由已知检测量来表达,因此由式(3)可得:
一般情况下,取室温温度为25 °C时的输出为:
根据式(1)、(2)、(7)可得补偿后的输出值。
偿后的数据如表3所示。
在表1中未补偿前的最大误差角度为0.682 7°,表3中补偿后的最大误差角度为0.261 6°,相对减少的误差角度为0.421 1°。
5 结语
由表1和表3的数据对比结果可以看出,经过温度补偿后的姿态检测精度相比补偿前有了很大的提高。
由此说明,在环境温度变化的条件下,利用最小二乘法进行温度补偿,可以达到预期的效果,因此这种方法可以运用到工程实际中。
参考文献
[1] 吴艳,郑学理,曾志强,等.倾角传感器温度特性研究[J].电子测量技术,2012,35(10):8⁃13.
[2] 陈萍,陈黎黎.一种压力传感器温度补偿新方法[J].计算技术与自动化,2009,28(4):49⁃52.
[3] 党兴菊,吴文良.最小二乘法拟合直线公式的初等推导[J].重庆科技学院学报,2010,12(4):185⁃187.
[4] 丁克良,沈云中,欧吉坤.整体最小二乘法直线拟合[J].辽宁工程技术大学学报,2010,29(1):44⁃47.
[5] JIA H, DUHAMEL R, MANCEAU J F, et al. Improvement of Lamb waves sensors temperature sensitivity compensation [J]. Sensors and Actuators A, 2005, 121: 321⁃326.
[6] CHEN Lung⁃Tai, LEE Chia⁃Yen, CHENG Wood⁃Hi. MEMS⁃based humidity sensor with integrated temperature compensation mechanism [J]. Sensors and Actuators A, 2008, 147:522⁃528.
[7] 杜永苹,何小映.浅谈传感器的温度补偿技术[J].电子设计工程,2009,17(6):
63⁃64.
[8] 刘诗斌,高德远,李树国.传感器温度补偿的调试规律研究[J].化工自动化及仪表,2000,27(1):51⁃53.
[9] 宋吉磊,吴训忠,郭铃.微机电系统陀螺仪随机漂移误差建模与滤波研究[J].导弹与航天运载技术,2012,32(4):35⁃38.
[10] 文香稳,潘明华,朱国力.倾角仪特性研究及其测量误差补偿[J].传感器与微系统,2011,30(3):84⁃86.。