机载雷达杂波模拟器的设计与实现

总体工程
机载雷达杂波模拟器的设计与实现*
孙凤荣,郑伟华
(91404部队, 河北秦皇岛066001)
摘要 给出了机载雷达杂波模拟器的设计和实现方案,该模拟器采用专用软件及专用硬件相结合,实时与非实时相结合的方法,产生的杂波能够满足所要求的功率谱特性,其实测结果和仿真结果能够符合。为机载雷达杂波的模拟和工程实现提供了可行的方法。
关键词 机载雷达;杂波;模拟;设计实现
中图分类号:TN959.7 文献标识码:A
D esign and R eali zati on of A irborne R adar C l utter Si m ul ator
SUN Feng rong,ZHENG W ei hua
(The91404Un i,t PLA, Q inhuangdao066001,Ch i n a)
Ab stract Th is paper presents an a irborne radar c l utter si m ulator desi gn and i m ple m en tati on.T he si m ulator uses specia l soft w are and spec i a l hardware,and comb i nati on o f the m to g enerate i n rea l ti m e or not t he clutter.T he generated cl utter can satisfy the po w er spectru m character i stic requ irement.T he m easured resu lt and si m ulation m a tch perfec tly.T hus a v i able m ethod for si m u l a tion and eng i neer i ng reali zati on of a irborne c l utter g enerati on i s prov i ded.
K ey w ords air bo rne radar;c l utter;s i m u l ation;design and i m ple m en tati on
0 引 言
机载雷达杂波模拟器主要模拟机载雷达的和、方位差、俯仰差和保护通道的基带地杂波、海杂波。从实现手段上分,有专用软件模拟、专用硬件模拟、通用仪器模拟等方法;从实时性上分,有实时模拟和非实时模拟等方法。模拟器采用专用软件及专用硬件,软件与硬件相结合,实时与非实时相结合的方法。
1 系统设计[1-6]
1.1 系统原理及组成
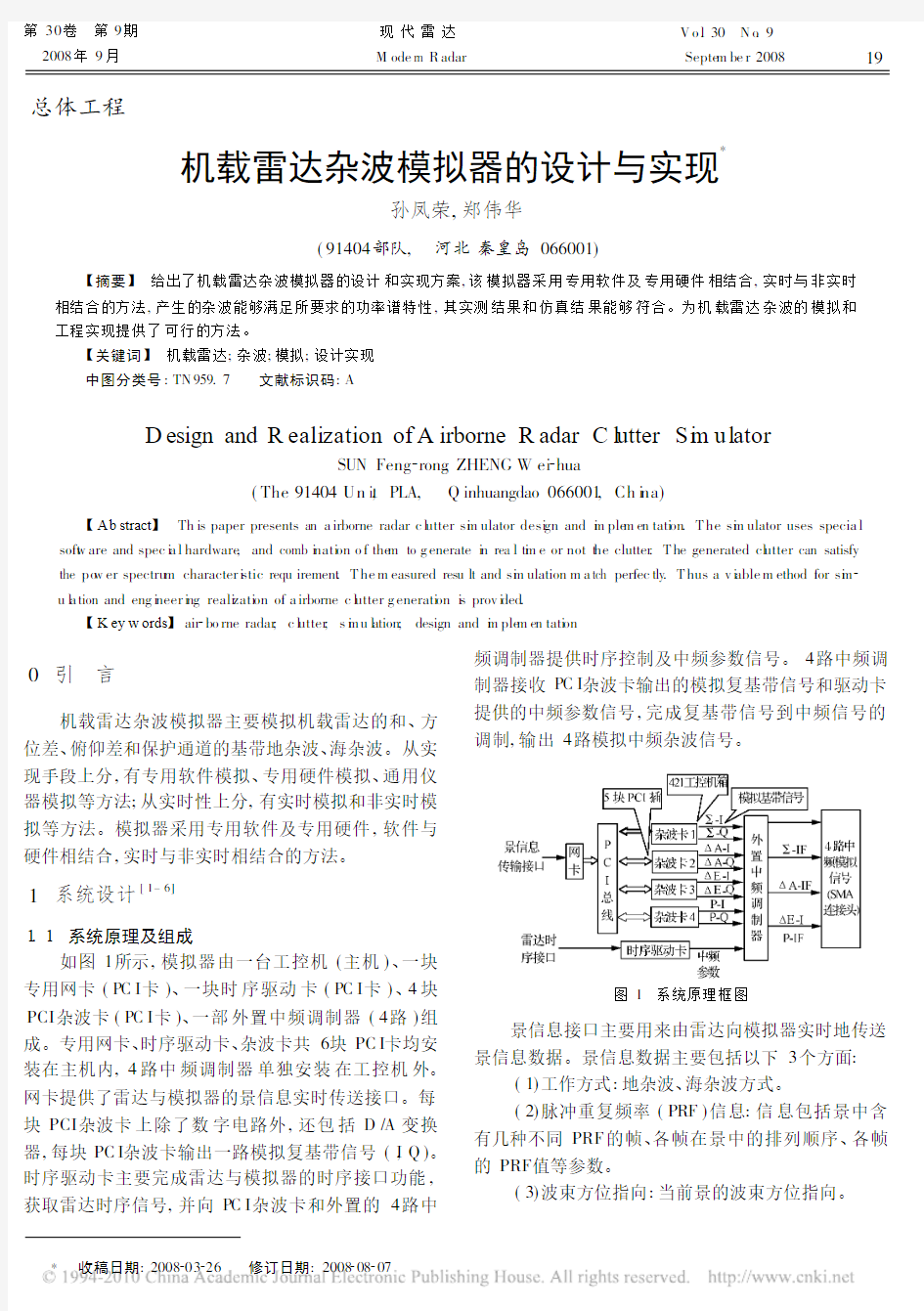
如图1所示,模拟器由一台工控机(主机)、一块专用网卡(PC I卡)、一块时序驱动卡(PC I卡)、4块PCI杂波卡(PC I卡)、一部外置中频调制器(4路)组成。专用网卡、时序驱动卡、杂波卡共6块PC I卡均安装在主机内,4路中频调制器单独安装在工控机外。网卡提供了雷达与模拟器的景信息实时传送接口。每块PCI杂波卡上除了数字电路外,还包括D/A变换器,每块PC I杂波卡输出一路模拟复基带信号(I,Q)。时序驱动卡主要完成雷达与模拟器的时序接口功能,获取雷达时序信号,并向PC I杂波卡和外置的4路中频调制器提供时序控制及中频参数信号。4路中频调制器接收PC I杂波卡输出的模拟复基带信号和驱动卡提供的中频参数信号,完成复基带信号到中频信号的调制,输出4
路模拟中频杂波信号。
图1 系统原理框图
景信息接口主要用来由雷达向模拟器实时地传送景信息数据。景信息数据主要包括以下3个方面:
(1)工作方式:地杂波、海杂波方式。
(2)脉冲重复频率(PRF)信息:信息包括景中含有几种不同PRF的帧、各帧在景中的排列顺序、各帧的PRF值等参数。
(3)波束方位指向:当前景的波束方位指向。
19
第30卷 第9期 2008年9月
现代雷达
M ode rn R adar
V o.l30 N o.9
Septe m be r2008
*收稿日期:2008 03 26 修订日期:2008 08 07
首先通过景信息编辑软件编辑若干景(如200景)的信息数据作为景信息文件存储在主机硬盘中,模拟器工作时,景信息文件下载到模拟器硬盘中,由硬件逐景产生杂波信号并输出。当最后一景杂波产生完后,又从第一景开始循环。尽管景是循环的,但杂波数据并不循环。
雷达时序接口信号主要由景起始、帧起始、发射起始、中频参数4个信号组成。
模拟器杂波输出包括4路模拟复基带杂波信号和4路模拟中频杂波信号。1.2 各组成部分设计
1.2.1 时序驱动卡
时序驱动卡的硬件实现如图2
所示。
图2 时序驱动卡的硬件实现框图
时序驱动卡的功能包括时钟信号的分路和驱动,雷达同步信号的差分到单端TTL 电平转换、分路及驱动。时序驱动卡采用功分器将雷达输入的正流时钟信号分为2路:一路直接输出到外量中频调制盒;另一路经过偏量后送到时钟分路器,分出4路时钟信号,分别送到4块PC I 杂波板,作为基准信号。采用差分到单端转换器件,将雷达输入的差分同步信号转换为TTL 信号,送到总线驱动芯片,分成4组信号分别送达4块PCI 杂波板,作为同步信号。1.2.2 PC I 杂波板
PCI 杂波卡硬件总体实现框图如图3
所示。
图3 PC I 杂波卡实现框图
PCI 杂波卡的硬件可以划分为5个部分:
1)PC I 接口芯片:采用PLX 公司的PC I 9052芯片,该芯片为PC I TARGET 类型芯片,完成PC I 总线信号驱动和PCI9052总线到本地总线的转换;
2)DDR 存储器:提供2条DDR 内存条插座,可以兼容512MB 和1GB 的DDR 内存条,用作杂波数据的存储空间;
3)FPGA:FPGA 拟采用A ltera 公司的超大规模器件EPI S40F780芯片,完成整个杂波卡的控制功能;
4)双路D /A 变换器:采用14位的双路D /A 变换器,将数字杂波数据更换为基带杂波信号;
5)低通滤波器:采用无源低通滤波器。
PCI 杂波卡为系统硬件的核心部分,其功能包括杂波数据存储,景信息存储,雷达杂波信号发送。每块PC I 杂波卡与雷达间的接口为2个S MA 阴性插座,分别为基带杂波信号的I 路和Q 路信号的输出接口;每块PC I 杂波卡与时序驱动卡间的接口包含一个S MA 阴性插座和一个RJ45插座,其中SMA 阴性插座为相参时钟输入接口,R J45插座为雷达同步信号输入接口。
模拟器主机与PCI 插卡之间的传输协议,包括工作模式定义、杂波数据存储结构、工作模式流程、景信息表的结构和控制信号的定义。
杂波数据在DDR SDRAM 中的存储是以波束指向为单位的分块存储结构,其中每波束指向的杂波数据有4种PRF 的杂波数据构成,为了便于读取,每个PRF 的杂波数据长度为32的倍数。1.2.3 网卡
接收雷达通信总线上的相关内容,并将其转换为硬件协议中量信息的格式,通过PC I 总线发送到PC I 杂波卡,作为杂波数据发送的控制信息。
网卡本地接口采用PC I 标准总线。1.2.4 外置中频调制盒
外置中频调制盒硬件实现如图4
所示。
图4 外置中频调制盒硬件框图
20
现代雷达30卷
外置中频调制盒的功能是将4路基带杂波数据调制到中频信号输出。
外置中频调制盒的输入接口为9个S MA 阴性插座,其中一个SMA 阴性插座为正弦时钟信号输入接口,其余8个为4组基带杂波I 、Q 信号输入接口,分别连接到4块PC I 杂波卡的基带杂波信号输出接口;外置中频调制盒的输出接口为4个S MA 阴性插座,为4路经过调制后的中频信号输出接口。
2 软件设计方案
[1-2,7]
软件设计平台:VC++6.0D ri v erstud i o NTDDK
操作系统:W i n dow s 2000
模拟软件的主要功能是首先根据用户输入的参数,产生相应的杂波数据,并将它们分别通过PC I 总线加载到和、方位差、俯仰差和保护4个通道的大容量动态存储器上,之后计算机不再对模拟硬件进行干预,直到需要加载新的杂波数据时,模拟软件才再次对硬件进行操控。软件的主要组成有以下9个模块:1)参数输入模块;2)杂波功率谱产生模块;3)杂波数据产生模块;4)数据存储模块;5)数据组织及格式转换模块;6)数据分析模块;7)数据及进程可视化模块;8)数据加载模块;9)PC I 设备驱动程序模块。
首先获取雷达参数、载机参数和环境参数等,根据当前指向范围依次计算每一个指向下所有距离门的理论杂波功率谱,进而计算每一个门的杂波根据,并建立适当的数据结构,以文章形式存储计算的杂波数据,减少重复计算所需时间,便于选择所需的杂波数据。
工作开始时,根据应用需要选择已产生的杂波数据进行文件下载,然后软件与硬件脱离,硬件根据雷达
给定的景信息和相应时序工作。
图5 杂波产生软件流程
输入参数包括:雷达载机参数,雷达天线方向图参
数,杂波参数,扫描方位和俯仰范围参数,(PRF)/脉冲宽度参数等。
杂波功率谱的形状随载机高度、速度、飞行姿态、地面反射特性、天线波束方向图、扫描指向、PRF 等参数的变化而不同,并且很多情况下不同距离门的杂波谱形状也差异很大,不能用固定的谱来对其进行描述。因此机械脉冲多普勒(PD )雷达地面杂波功率谱不能像地面雷达那样简单地用高斯谱或立方谱来描述,必须针对不同的参数对杂波谱进行分析计算才可以得到比较精确的结果。
计算机载雷达的杂波功率谱通常采用距离等多普勒线积分的方法,同一距离门和多普勒带宽内的杂波功率考虑了距离模糊和速度模糊的所有微小地面面积反射功率的总和。有距离模糊时,不同脉冲重复周期(PR I)的同号距离门会在地面上形成多个距离环,因此计算杂波功率的积分区域是所有不同距离上同号距离门圆环与等多普勒线相交区域。
在杂波功率谱计算中有很小的模块,其中对天线方向图的建模需要进一步细化,为了能够较为准确地体现出主瓣与旁瓣波束对地面杂波的贡献,对主瓣和第一旁瓣采用常见的高斯形状做数学建模;而对于子波束除去主瓣与第一旁瓣之外的其余旁瓣形成的旁瓣电平,由于其电平较低,受噪声影响具有不规则的起伏,假设旁瓣电平的最大值为g 2,为简化计算,旁瓣电平用常量g 2表示。
设子波束主瓣方向图函数为高斯状
GMB =exp -2ln2
2
20
| |!u 1
(1)
式中: 0为半功率夹角。
设u 1为主瓣增益,等于g 2时的 值
u 1= 0
ln g 2/(-
2ln2)
(2)
设第一旁瓣方向图用中心位置为+1.5u 1的高斯函数描述
图6 雷达天线方向图
G S l 1( )=g 1exp -2ln2( ?1.5u 1)
2
2
0-sl
1
u 1<| |!2u 1
(3)
21
第9期孙凤荣,等:机载雷达杂波模拟器的设计与实现
式中:g1为第一瓣的峰值,取值 0-sl
1
;g2为 =?u1,?2u1时第一旁瓣增益为
0-sb
1
=0.5u1(-2ln2)/l n(g2/g1)(4)波束半功率夹角随指向变化,指向以2#为间隔,变化规律 0= 0/cos , 0为新的波束半功率夹角; 为当前指向与波束正中心的夹角。杂波数据的参数是以杂波功率谱的产生为基础的。
由于杂波计算后产生大量的中间数据,所以整个计算过程中会牵涉到大量的临时数据的存储、读取和删除工作。对数据的存储和管理也是需要完善考虑的问题,特别是在距离门数较多的情况下更显得尤为重要,对系统的内存和硬盘容量将有更高要求。
因为计算机产生的数据和加载到模拟器板卡上的数据间存在着存储方式和格式的差别,所以在加载数据前还需要进行数据的组织和格式转换。为了保证计算过程中的精度,在计算杂波数据时使用的是double 类型的数据,一个数据占用64位宽度,浮点类型;加载到模拟器上的数据是short类型,一个数据占用16位宽度,整型数据。另外,对于模拟器硬件大容量动态存储器的加载过程并非简单的文件顺序读写加载,需要对原有的数据进行分割或组合,以满足相关的传输要求,传输协议由PC I板卡设计人员提供。
设计中对产生的部分中间载波数据进行频谱的分析和幅度统计,以便为数据的可视化提供数据源。可视化编程能让用于对程序运行进程状态和生成数据结果有直观的了解,通过建立运行条、消息空间、视图作图等手段,可以让用户有效的监控程序的运行。预计在本设计中建立距离门数据计算进程、帧数据计算进程、指向计算进程等;建立杂波功率谱视图、杂波幅度统计图等。
3 关键技术[1-2,7]
3.1 杂波数据的产生
杂波数据根据杂波模型产生,使杂波数据满足要求的幅度分布与谱分布。杂波的谱分布与很多参数有关,如平台高度、平台速度、波速方位指向、波速俯仰指向、雷达工作模式、PRF、雷达波形等,且每个距离单元的谱分布都不相同。因此,产生杂波数据的计算量非常大,杂波数据只能离线产生。
所有情况下的杂波数据数据量是极大的,因此,离线杂波数据产生带来的另一个问题是要求模拟器硬件电路具有海量存储器,这也是极其难实现的。现采用的办法是把影响雷达杂波谱分布的参数分为2部分,一部分让其固定不变(称为固定系数),如平方高度、平方速度、波束俯仰指向、雷达工作模式、雷达方位扫描区域等,在上述参数固定的情况下,产生另一部分参数(称为可变参数)变化时所有情况下的杂波数据,如PRF、雷达波束方位指向等,这样产生的杂波数据量大大减少,使硬件电路对其进行存储变成可能。
3.2 脉压雷达杂波数据产生
产生出来的杂波数据为常规雷达杂波数据,每个距离单元产生一个数据,但对于脉冲压缩波形,应将每个杂波数据变成一个脉压波形,每个波形是相互重叠的,叠加后就得到脉压雷达杂波数据。将常规雷达杂波数据变为脉压雷达杂波数据的过程称为波形调制,常规雷达杂波数据与脉压波形相卷积就可实现波形调制。波形调制可采用硬件实现与软件实现2种方案,硬件实现将大大增加模拟器的设备量和硬件成本,以海杂波方式为例,信号波形的时带积约为20000,卷积若用FI R来实现,当波形采样率为2倍带宽时,每个PC I杂波板需要用4个40000阶的实FI R才能实现波形调制。
采用软件实现方案完成波形调制,克服了硬件实现的困难,但缺点是增加了数据产生的计算量,杂波数据产生速度较慢。
4 结束语
机载雷达杂波模拟器采用专用软件及专用硬件,软件与硬件相结合,实时与非实时相结合的方法,产生的杂波能够满足所要求的功率谱特性,已应用于工程测试,其实测结果和仿真结果能够符合,为机载雷达杂波的模拟及工程实现提供了可行的方法。
参 考 文 献
[1] 米切尔.雷达系统模拟[M].北京:科学出版社,1982.
[2] M e rrill I.Sko l n i k.雷达手册.第2版[M].北京:电子工
业出版社,2003.
[3] 丁鹭飞,耿富录.雷达原理.第3版[M].西安:西安电
子科技大学出版社,2002.
[4] 谢君明.高速数字电路设计与噪声控制技术[M].北京:
电子工业出版社,1999.
[5] 何 友.雷达自动检测与恒虚警处理[M].北京:清华大
学出版社,1999.
[6] 许 欣.基于FPGA的嵌入式系统设计[M].北京:机械
工业出版社,2004.
[7] 圣 文.雷达系统建模与仿真导论[M].北京:国防工业
出版社,2006.
孙凤荣 女,1963年生,高级工程师,硕士。研究方向为信号处理。
22现代雷达30卷
雷达系统中杂波信号的建模与仿真
1.雷达系统中杂波信号的建模与仿真目的 雷达的基本工作原理是利用目标对雷达波的散射特性探测和识别目标。然而目标存在于周围的自然环境中,环境对雷达电磁波也会产生散射,从而对目标信号的检测产生干扰,这些干扰就称为雷达杂波。对雷达杂波的研究并通过相应的信号处理技术可以最大限度的压制杂波干扰,发挥雷达的工作性能。 雷达研制阶段的外场测试不仅耗费大量的人力、物力和财力,而且容易受大气状况影响,延长了研制周期。随着现代数字电子技术和仿真技术的发展,计算机仿真技术被广泛应用于包括雷达系统设计在内的科研生产的各个领域,在一定程度上可以替代外场测试,降低雷达研制的成本和周期。 长期以来,由于对杂波建模与仿真的应用己发展了多种杂波类型和多种建模与仿真方法。然而却缺少一个集合了各种典型杂波产生的成熟的软件包,雷达系统的研究人员在需要用到某一种杂波时,不得不亲自动手,从建立模型到计算机仿真,重复劳动,造成了大量的时间和人力的浪费。因此,建立一个雷达杂波库,就可以使得科研人员在用到杂波时无需重新编制程序,而直接从库中调用杂波生成模块,用来产生杂波数据或是用来构成雷达系统仿真模型,在节省时间和提高仿真效率上的效益是十分可观的。 从七十年代至今已经公布了很多杂波模型,其中有几类是公认的比较合适的模型。而且,杂波建模与仿真技术的发展己有三十多年的历史,己经有了一些比较成熟的理论和行之有效的方法,这就使得建立雷达杂波库具有可行性。 为了能够反映雷达信号处理机的真实性能,同时为改进信号处理方案提供理论依据,雷达杂波仿真模块输出的杂波模拟信号应该能够逼真的反映对象环境的散射环境。模拟杂波的一些重要散射特性影响着雷达对目标的检测和踉踪性能,比如模拟杂波的功率谱特性与雷达的动目标显示滤波器性能有关;模拟杂波的幅度起伏特性与雷达的恒虚警率检测处理性能有关。因此,杂波模拟方案的设计是雷达仿真设计中极其重要的内容,杂波模型的精确性、通用性和灵活性是衡量杂波产生模块的重要指标。 2.Simulink简介 Simulink是MATLAB最重要的组件之一,它提供一个动态系统建模、仿真和
机载MIMO雷达杂波建模及杂波特性分析
机载MIMO雷达杂波建模及杂波特性分析 严韬,谢文冲,王永良 (空军雷达学院雷达兵器运用工程重点实验室,湖北武汉430019) 摘 要:机载MIMO雷达通过将MIMO技术应用到机载雷达,显著增加了雷达的系统自由度,改善了机载雷达的杂波抑制性能。首先建立了机载MIMO雷达的杂波数学模型;然后给出了两种典型的正交信号形式;最后对不同信号形式和不同误差条件下机载MIMO雷达的杂波功率谱和特征谱进行了仿真分析。仿真结果表明,机载MIMO雷达与机载相控阵雷达有相似的杂波分布,但其杂波自由度显著增加;发射信号从正交向相干的退化过程中,杂波在空时二维平面形成主副瓣并逐渐锐化。 关键词:机载MIMO雷达;杂波建模;杂波空时分布;杂波自由度 中图分类号:TN959 文献标识码:A 文章编号:167222337(2010)0420289207 Model and C lutter Ch aracteristics Analysis for Airborne MIMO R ad ar YAN Tao,XIE Wen2chong,WAN G Y ong2liang (Key Research L ab,A i r Force Radar A cadem y,W uhan430019,China) Abstract:Based on the application of MIMO technology to airborne radar,the degree of f reedom(DOF) of system for airborne MIMO radar increases dramatically and clutter suppression performance is improved effectively.The clutter model is established firstly in this paper,and then two typical orthogonal signals are introduced.Finally the simulation for clutter power spectra and eigenspectra under different signal formats and error conditions are implemented,and the clutter characteristics are analyzed.The simulation results in2 dicate that the distribution of clutter for airborne MIMO radar is similar to that for airborne phased array ra2 dar,but the DOF of clutter for airborne MIMO radar increases.The mainlobe and sidelobes are formed and acuminated gradually on the space2time plane when the transmitting signals degenerate f rom orthogonal sig2 nals to coherent signals. K ey w ords:airborne MIMO radar;clutter modeling;space2time distribution of clutter;degree of f ree2 dom(DOF)of clutter 1 引言 M IMO(多输入多输出)雷达是近几年发展起来的一种新体制雷达,其概念首先是被Fishler[1]在2004年提出的。它成功借鉴了在通信领域取得巨大成功的多输入多输出技术,使雷达系统通过独特的时间2能量管理技术来实现多个独立波束同时照射目标,从而有效改善雷达的性能。M IMO 雷达具有处理维数高、收发孔径利用充分、角分辨率高的优点;可以兼顾大空域搜索和空域覆盖率要求;利用多信号通道联合处理可以有效克服目标起伏,提高雷达检测性能;有效提高多目标、小目标、慢目标的检测能力等。目前,国内外许多学者都对M IMO雷达展开了大量的研究,主要研究方向集中在雷达系统结构研究[223]、信号波形设计[429]、目标检测性能[10211]及空间谱估计[12]等方面,研究对象主要以地基雷达为主。 机载M IMO雷达通过将M IMO技术应用到机载雷达,显著增加了雷达的系统自由度,改善了机载雷达的杂波抑制性能。本文研究机载M IMO 雷达的杂波分布特性,其安排如下:第1节为M I2 MO雷达背景知识介绍;第2节建立机载M IMO 雷达的杂波模型,首先基于UL A(Uniform Linear Array,均匀线阵)建立了机载M IMO雷达的阵列几何模型,然后给出发射信号完全正交和不完全 第4期2010年8月 雷达科学与技术 R a d a r S c i e nc e a nd Te c hnol ogy Vol.8No.4 August2010 收稿日期:2010203219;修回日期:2010205225 基金项目:国家杰出青年科学基金(No.60925005)
基于ZMNL方法的海杂波模型仿真探讨
基于ZMNL方法的海杂波模型仿真探讨 摘要海杂波作为环境波形中最为复杂的一种波形,常利用瑞利分布、对数正态分布、韦伯尔分布和K分布等几种常见模型对其进行描述。本文主要介绍利用零记忆非线性变换法(ZeroMemory Nonlinearity)對于雷达波形进行仿真。 关键词海杂波;零记忆非线性变换法;杂波统计模型 雷达杂波干扰历来是雷达科技工作者和观测者十分关注的课题,很多情况下,限制雷达探测能力的不是接收机的内部噪声,而是环境杂波。研究杂波的形成机理,杂波的反射强度与雷达参数的关系,讨论杂波的分布特性等这些都可以为制定雷达方案、选择雷达参数,采取各种抗杂波的措施、杂波模拟等工作提供理论依据,指明技术方向,避免雷达的设计研究工作一定程度上的盲目性。近半个世纪以来,人们对雷达杂波问题进行了大量的理论研究和试验测定,对雷达杂波的特性认识已经逐渐深入。先后建立了几种雷达杂波统计模型,包括瑞利分布、对数正态分布、韦伯尔分布和K分布等。对杂波进行分析,建立准确的杂波统计模型以及相应的仿真方法,一方面可以为雷达模拟器提供逼真的杂波环境模型;另一方面,也有助于雷达杂波滤波器的设计和实现,提高抑制杂波的能力,提高雷达探测性能。所以,雷达环境特性的研究,对提高雷达性能有着十分重要的意义,特别是面对现代目标隐身技术和超低空突防的威胁,愈加显得重要。 现代雷达系统越来越复杂。在雷达研制和生产的各个阶段,都离不开对雷达性能和指标的测试。如全部采用外场测试,将消耗大量的人力、物力、财力且易受天气状况影响,延长研制周期。而利用现代仿真技术和数字电路技术的雷达信号模拟器,以其经济灵活和可重复性等优点,已成为雷达系统的设计、开发和测试中不可缺少的重要组成部分。一些技术发达国家都比较普遍的使用雷达信号模拟器,凡是用雷达作为探测手段的武器系统,一般都配有比较先进的雷达信号模拟器,以便逼真地模拟威胁背景。因此,研制高性能的雷达信号模拟器是我军武器装备发展所迫切要求的下,以计算机为基础的仿真是目前雷达界公认的以可控方式经历和测量全部雷达性能的唯一办法。 由此计算机建模和仿真技术在雷达设计和开发中变得日益重要。目标和环境的真实统计模型可以用来深入了解新的信号处理方案并解释真实系统在实际实验中的工作情况;也可以用对系统的逐个脉冲仿真来开发和实验实时信号处理算法,并检查这些算法的硬件和软件实现。 海杂波的建模与仿真是雷达目标模拟中环境模拟的重要部分。仿真得到的海杂波数据良好与否是雷达最优化设计及雷达信号处理的关键。对海杂波的研究迄今已有50多年,但其实验数据和理论远不能令人满意,还不可能对海面回波的电平(作为雷达参数和海面状态参数的函数)做出高度准确的预测。对雷达波来说,海面是极其复杂的反射体,关键是找出一些合适的参数,以便建立一个描述海浪回波依从关系的数学模型。
雷达系统建模与仿真报告模板.doc
设计报告一十种随机数的产生 一概述 . 概论论是在已知随机变量的情况下,研究随机变量的统计特性及其参量,而随机变量的仿真正好与此相反,是在已知随机变量的统计特性及其参数的情况下研究如何在计算机上产生服从给定统计特性和参数随机变量。 下面对雷达中常用的模型进行建模: 均匀分布 高斯分布 指数分布 广义指数分布 瑞利分布 广义瑞利分布 Swerling 分布 t分布 对数一正态分布 韦布尔分布 二随机分布模型的产生思想及建立 . 产生随机数最常用的是在(0,1) 区间内均匀分布的随机数,其他分布的随机数可利用均匀分布随机数来产生。 均匀分布 1>( 0, 1)区间的均匀分布: 用混合同余法产生(0,1)之间均匀分布的随机数,伪随机数通常是利用递推公式产生的,所用的混和同余法的递推公式为: x n 1 = x n +C(Mod m)
其中,C是非负整数。通过适当选取参数 C可以改善随机数的统计性质。一般取作小于 M的任意奇数正整数,最好使其与模 M互素。其他参数的选择 (1)的选取与计算机的字长有关。 (2) x(1) 一般取为奇数。 用Matlab 来实现,编程语言用 Matlab 语言,可以用 hist 数的直方图(即统计理论概率分布的一个样本的概率密度函数) 函数画出产生随机,直观地看出产 生随机数的有效程度。其产生程序如下: c=3;lamade=4*200+1; x(1)=11; M=2^36; for i=2:1:10000; x(i)=mod(lamade*x(i-1)+c,M); end; x=x./M; hist(x,10); mean(x) var(x) 运行结果如下: 均值 =方差= 2> (a,b )区间的均匀分布: 利用已产生的( 0,1)均匀分布随机数的基础上采用变换法直接产生(a,b)均匀分布的随机数。 其概率密度函数如下: 1 p( x) b a a x b 0 x a, x b 其产生程序如下: c=3;lamade=4*201+1; a=6;b=10; x(1)=11;M=2^36; for i=2:1:10000; x(i)=mod(lamade*x(i-1)+c,M);
机载雷达地杂波信号仿真
机载雷达的地杂波仿真实现 前言 机载雷达由于架设在运动的高空平台上,具有探测距离远、覆盖范围大、机动灵活等特点,应用范围相当广泛,可以执行战场侦察、预警等任务。在海湾战争、伊拉克战争中起到关键作用,在现代战争中越来越不可缺少,因此近年来受到广泛重视。但由于机载雷达的应用面临非常复杂的杂波环境,杂波功率很强,载机的平台运动效应使杂波谱展宽。此外,飞机运动时,杂波背景的特性会随时间变化。因此,有效地抑制这种时间非平稳和空间非平均的杂波干扰时雷达系统有效完成地面目标和低空飞行目标检测必须解决的首要问题。 从理想雷达系统设计过程中知道,雷达设计的目的提出之后,首先要考虑的是环境的影响,地海杂波环境对雷达性能的发挥是一个严重的负担,尤其是机载下视雷达,会遇到更加恶劣的杂波环境,能否正确估计杂波对雷达性能的影响,是雷达系统成败的关键之一。 。机载雷达遇到的地面杂波不仅强度大,多普勒频谱宽,而且可能在所有的距离上成为目标检测的背景;另一方面,雷达机载飞行地域广、地形地貌多种多样,仅使用一些简单的、典型的杂波数据已不能满足需要。因此,只有弄清楚地面/海面杂波的特性,才能够正确地确定机载雷达方案,选择主要的技术参数。例如: 1.只有根据各种地形和海面杂波的主要特征参数,并经过严格的杂波计算,才能得到比较准确的杂波强度和频谱数据,从而在这个基础上确定雷达的技术方案,对信号质量、系统动态范围、天线副瓣电平等指标提出要求。 2.只有弄清楚杂波的分布特性及参数,才能恰当的设计杂波抑制器的频率响应特性和恒虚警处理器,更加有效地消除主瓣杂波,并在一定的副杂波背景中检测目标。 3.雷达信号模拟器是调整和检验机载雷达性能的必要手段,但只有在弄清楚杂波的特性参数以后,才能够对信号及杂波模拟器提出合理的、准确的要求。 目前使用杂波模型主要有三种方式:描述杂波幅度和功率谱的统计模型,描述杂波 与频率、极化、俯角、环境参数等物散射单元机理的机理模型,描述由试验数据拟和0 理量之间依赖关系的关系模型。 1.描述杂波散射单元机理的机理模型 杂波机理模型的研究是属于杂波雷达截面的理论分析范畴,即根据各种电磁散射理论研究杂波单元产生散射场的各种机理,并利用各种计算方法和计算机技术定量预估各种情况下杂波单元的雷达散射截面特征。散射过程的讨论必须同特定的结构单元结合起来,这是机理模型分析的基本点。在散射单元的物理结构方面,对于现有的一些比较成功的地杂波和海杂波模型(如组合表面模型)一般都只是对于特定的地貌、海情,或者
SIRP法K分布雷达杂波的建模与仿真
SIRP 法K 分布雷达杂波的建模与仿真 etpolo@https://www.360docs.net/doc/bb15289937.html, (本文是在论坛已有一篇文章《SIRP 法相干相关K 分布雷达杂波的建模与仿真》的基础上修改而来,在此首先感谢这篇文章的作者给予我的帮助。之所以完成这篇文章,有三个方面的原因:一是对原文章和仿真程序代码明显存在一些不一致的地方,因此,我这里对每个公式进行检验(后来证明文章的公式正确无误,但所给的仿真代码存在问题),二是对自己近4天工作的一个总结,以便以后学习可以参考;三是可以放在网上给初学者一些参考,以便后来者不再走自己曾经走过的弯路。文章的一些文字是在匆忙间完成,只求能表达所述意思,没有详细斟酌,海涵:)) 所谓杂波仿真,实际上就是要生成一系列在幅度上服从特定的概率密度分布(pdf )的相关随机序列,常见的杂波仿真方法有两种:零记忆非线性变换法(ZMNL )和 球不变随机过程法(SIRP )。ZMNL 方法的基本思想是:首先产生相关的高斯随机过程,然后经过某种非线性变换得到所求的相关随机序列。这种方法的缺点就是输入序列与输出序列间有复杂的非线性关系,因此必须寻找输入序列与输出序列的相关函数间的非线性对应关系。SIRP 方法的基本思想是:产生一个相关的高斯随机过程,然后用具有所要求的单点概率密度函数的随机序列进行调制。这种方法的缺点则是受所求的序列的阶数及自相关函数的限制,同时这种方法的计算量非常大,不易形成快速算法。 ISAR 是一种相干雷达,其海杂波必然是相干且时空相关的。对于相干相关杂波,以往的方法都是将非相干的ZMNL 方法加以推广得到相干的ZMNL 模型。这种方法得以应用的一个前提是已知非线性变换前后杂波相关系数的非线性关系,然而对于相干相关K 分布杂波却很难找到这样一种非线性变换,于是我们采取SIRP 方法来仿真ISAR 的海杂波。 K 分布适用于描述高分辨雷达的非均匀杂波,多用于对海杂波的模拟。K 分布可以由一个均值是慢变化的瑞利分布来表示,其中这个慢变化的均值服从Γ分布。K 分布的概率密度函数为: ()()()12;,K /,(0,0)2x f x x x ννανανανα-??=??>> ?Γ?? (1) (公式1经过了本文查阅相关文献进行了确认) 其中,ν是形状参数,α是尺度函数,()Γ是伽马函数,K ν是第二类修正贝赛尔函数。杂波平均功率2σ,ν和α之间的关系可表示为: 2 22σαν= (2) (公式2经过本人查阅文献进行了确认) 对于大多数杂波来说,形状参数的取值范围是0ν<<∞,对于较小的ν的取值,如0.1ν→时,杂波有较长的托尾,ν→∞时的分布接近于瑞利分布。图1给出了K 分布杂波序列的实现结构。
SIRP法相干相关K分布雷达杂波的建模与仿真
SIRP 法相干相关K 分布雷达杂波的建模与仿真 gjj_hit@https://www.360docs.net/doc/bb15289937.html, 所谓杂波仿真,实际上就是要生成一系列在幅度上服从特定的概率密度分布(pdf )的相关随机序列,常见的杂波仿真方法有两种:零记忆非线性变换法(ZMNL )和 球不变随机过程法(SIRP )。ZMNL 方法的基本思想是:首先产生相关的高斯随机过程,然后经过某种非线性变换得到所求的相关随机序列。这种方法的缺点就是输入序列与输出序列间有复杂的非线性关系,因此必须寻找输入序列与输出序列的相关函数间的非线性对应关系。SIRP 方法的基本思想是:产生一个相关的高斯随机过程,然后用具有所要求的单点概率密度函数的随机序列进行调制。这种方法的缺点则是受所求的序列的阶数及自相关函数的限制,同时这种方法的计算量非常大,不易形成快速算法。 ISAR 是一种相干雷达,其海杂波必然是相干且时空相关的。对于相干相关杂波,以往的方法都是将非相干的ZMNL 方法加以推广得到相干的ZMNL 模型。这种方法得以应用的一个前提是已知非线性变换前后杂波相关系数的非线性关系,然而对于相干相关K 分布杂波却很难找到这样一种非线性变换,于是我们采取SIRP 方法来仿真ISAR 的海杂波。 K 分布适用于描述高分辨雷达的非均匀杂波,多用于对海杂波的模拟。K 分布可以由一个均值是慢变化的瑞利分布来表示,其中这个慢变化的均值服从Γ分布。K 分布的概率密度函数为: ()()()12;,K /, (0,0)2x f x x x ν νανανανα-?? =??>> ?Γ?? (1) 其中,ν是形状参数,α是尺度函数,()Γ 是伽马函数,K ν是第二类修正贝赛尔函数。杂波平均功率2σ,ν和α之间的关系可表示为: 2 2 2σαν = (2) 对于大多数杂波来说,形状参数的取值范围是0ν<<∞,对于较小的ν的取值,如0.1ν→时,杂波有较长的托尾,ν→∞时的分布接近于瑞利分布。图1给出了K 分布杂波序列的实现结构。 图1 相干相关K 分布杂波SIRP 方法 图中,1()w k 为一复高斯白噪声,线性滤波器1()H z 由()x k 的相关函数设计决定,2()w k 为一与1()w k 相互独立的实高斯噪声,线性滤波器2()H z 必须使得输出的高斯序列具有高度的相关性(相关函数接近于1),ZMNL 变换使得输出的
基于Simulink的脉冲多普勒雷达系统建模仿真
基于Simulink的脉冲多普勒雷达系统建模仿真 胡海莽1,杨万海 (西安电子科技大学电子工程学院,陕西 西安 710071) 摘要:利用计算机仿真技术的可控制性,可重复性,无破坏性,安全性,经济性等特点与优势对雷达电子对抗装备及其技术与战术运用等进行仿真与效能评估,是当前和未来雷达与电子对抗领域研究中的一种重要手段。本文的工作是建立一个基于Simulink的雷达系统仿真库,因为MATLAB的使用广泛性,因此基于其上的雷达系统仿真库较易推广。该雷达系统仿真库不仅可以协助设计雷达系统而且可以帮助学生学习雷达系统。 关键词:雷达;建模;仿真 Modeling and Simulation of PD Radar System Based on Simulink HU Hai-Mang, YANG Wan-Hai (Xidian Univ, Xi’an 710071, China) Abstract: The modeling and simulation of radar systems with system simulation tools make it possible to complete scheme reasoning and performance evaluation efficiently. This paper constructs some radar function blocks and models and simulates a pulse Doppler radar system based on Simulink5.0.The software is perfectly applied in the study of algorithms in radar signal processing and displays the system’s performance. Keywords: radar; modeling; simulation; Simulink; 1 引言 在雷达信号处理系统中系统级仿真占有极其重要的地位,经过系统级仿真能够保证产品在最高层次上的设计正确性。因为外场模拟真实战场复杂电磁环境是非常困难的,同时也耗资巨大。外场试验的次数有限,难以全面反映雷达系统在各种复杂环境下的性能,外场测试和设计修改使得试验周期长,并造成巨大浪费。 以往的工作多是基于EDA平台如SPW和SystemView,这些软件专业性很强,而且价格较贵,因此基于这些平台的雷达系统仿真库也较难推广。本文的工作是建立一个基于Simulink的雷达系统仿真库,因为MATLAB的广泛性使用,因此基于其上的雷达系统仿真库较易推广。该雷达系统仿真库不仅可以协助设计雷达系统而且可以帮助学生学习雷达系统。 Simulink是一种开放性的,用来模拟线性或非线性的以及连续或离散的或者两者混合的动态系统的强有力的系统级仿真工具。它是MATLAB的一个附加组件,用来提供一个系统级的建模与动态仿真工作平台。Simulink是用模块组合的方法来使用户能够快速、准确地创建动态系统的计算机模型的。另外,Simulink还提供一套图形动画的处理方法,使用户可以方便地观察到仿真的整个过程。 Simulink5.0在软硬件的接口方面有了长足的进步,Simulink已经可以很方便地进行实时的信号控制和处理、信息通信以及DSP的处理。仿真程序经过编译可以直接下载到DSP等硬件设备中去,使得从系统级仿真到硬件实现可以一气呵成。 本文的仿真基于MATLAB6.5及其所带的Simulink5.0。 2 脉冲多普勒雷达系统仿真 脉冲多普勒(PD)雷达是在动目标显示雷达基础上发展起来的一种新型雷达体制。这种雷达具 作者简介:胡海莽(1977-),男,江苏省淮安市人,现为西安电子科技大学电路与系统学科硕士研究生,研究方向为信息处理,系统仿真。
机载雷达杂波模拟器的设计与实现
总体工程 机载雷达杂波模拟器的设计与实现* 孙凤荣,郑伟华 (91404部队, 河北秦皇岛066001) 摘要 给出了机载雷达杂波模拟器的设计和实现方案,该模拟器采用专用软件及专用硬件相结合,实时与非实时相结合的方法,产生的杂波能够满足所要求的功率谱特性,其实测结果和仿真结果能够符合。为机载雷达杂波的模拟和工程实现提供了可行的方法。 关键词 机载雷达;杂波;模拟;设计实现 中图分类号:TN959.7 文献标识码:A D esign and R eali zati on of A irborne R adar C l utter Si m ul ator SUN Feng rong,ZHENG W ei hua (The91404Un i,t PLA, Q inhuangdao066001,Ch i n a) Ab stract Th is paper presents an a irborne radar c l utter si m ulator desi gn and i m ple m en tati on.T he si m ulator uses specia l soft w are and spec i a l hardware,and comb i nati on o f the m to g enerate i n rea l ti m e or not t he clutter.T he generated cl utter can satisfy the po w er spectru m character i stic requ irement.T he m easured resu lt and si m ulation m a tch perfec tly.T hus a v i able m ethod for si m u l a tion and eng i neer i ng reali zati on of a irborne c l utter g enerati on i s prov i ded. K ey w ords air bo rne radar;c l utter;s i m u l ation;design and i m ple m en tati on 0 引 言 机载雷达杂波模拟器主要模拟机载雷达的和、方位差、俯仰差和保护通道的基带地杂波、海杂波。从实现手段上分,有专用软件模拟、专用硬件模拟、通用仪器模拟等方法;从实时性上分,有实时模拟和非实时模拟等方法。模拟器采用专用软件及专用硬件,软件与硬件相结合,实时与非实时相结合的方法。 1 系统设计[1-6] 1.1 系统原理及组成 如图1所示,模拟器由一台工控机(主机)、一块专用网卡(PC I卡)、一块时序驱动卡(PC I卡)、4块PCI杂波卡(PC I卡)、一部外置中频调制器(4路)组成。专用网卡、时序驱动卡、杂波卡共6块PC I卡均安装在主机内,4路中频调制器单独安装在工控机外。网卡提供了雷达与模拟器的景信息实时传送接口。每块PCI杂波卡上除了数字电路外,还包括D/A变换器,每块PC I杂波卡输出一路模拟复基带信号(I,Q)。时序驱动卡主要完成雷达与模拟器的时序接口功能,获取雷达时序信号,并向PC I杂波卡和外置的4路中频调制器提供时序控制及中频参数信号。4路中频调制器接收PC I杂波卡输出的模拟复基带信号和驱动卡提供的中频参数信号,完成复基带信号到中频信号的调制,输出4 路模拟中频杂波信号。 图1 系统原理框图 景信息接口主要用来由雷达向模拟器实时地传送景信息数据。景信息数据主要包括以下3个方面: (1)工作方式:地杂波、海杂波方式。 (2)脉冲重复频率(PRF)信息:信息包括景中含有几种不同PRF的帧、各帧在景中的排列顺序、各帧的PRF值等参数。 (3)波束方位指向:当前景的波束方位指向。 19 第30卷 第9期 2008年9月 现代雷达 M ode rn R adar V o.l30 N o.9 Septe m be r2008 *收稿日期:2008 03 26 修订日期:2008 08 07
海杂波的建模与仿真
信息与通信工程学院 综合实验(1)设计报告海杂波的建模与仿真 学号:S310080092 专业:通信与信息系统 学生姓名:韩鹏 任课教师:穆琳琳 2011年6月
海杂波的建模与仿真 韩鹏 摘要:海杂波的建模与仿真是雷达目标模拟中环境模拟的重要部分。仿真得到的海杂波数据良好与否是雷达最优化设计及雷达信号处理的关键。海杂波的存在对雷达的目标检测、定位跟踪的性能都将产生影响,因此,在海杂波为主要干扰源的情况下,有必要对雷达探测区域内的海杂波特性进行分析,本文给出了海杂波的一些相关特性和几种分布下海杂波的模型以及两种海杂波的模拟方法,一种是无记忆非线性变换法(Zero Memory Nonlinearity,ZMNL),另一种是球形不变随机过程法(Spherically Invariant Random Process,SIRP),最后给出ZMNL模拟方法的仿真。 关键词:海杂波随机过程建模与仿真ZMNL SIRP 一、实验目的 海面上反射回来的不需要的杂波称为海杂波。海杂波的存在对雷达的目标检测、定位跟踪的性能都将产生影响,因此,在海杂波为主要干扰源的情况下,有必要对雷达探测区域内的海杂波特性进行分析,建立准确的海杂波模型,一方面可以为雷达系统仿真提供逼真的杂波环境的模型;另一方面则有助于雷达杂波滤波器的设计和实现,提高抑制杂波的能力,提高雷达的探测性能。因此,海杂波的建模与仿真具有重要意义。 二、实验内容简介 2.1海杂波的概念和统计性质 2.1.1海杂波的概念 大家都知道,雷达系统的主要功能是目标检测,即发现目标。还可以在一个或者多个雷达坐标上,粗略的确定目标的位置。雷达可以对目标进行重复测量的方法,沿目标轨道对目标进行跟踪,可以外推到未来位置,估计拦截点或落点,也可以向后外推,估计发射点。 但是当雷达探测位于陆地或海面上的目标时,雷达接受的不仅有目标的回波,而且叠加有不需要的被照射区域的回波,这部分回波在雷达术语里就被称为杂波。雷达杂波就是雷达波束在物体表面形成的后向散射,海杂波就是海面上反射回来的杂波,它表现出更强的动态特性。海面作为雷达波的反射面,其性能十分复杂,海风、海流、海浪、潮汐和不同的水质等都对海杂波的产生有着不同的影响。 2.1.2海杂波的统计性质 雷达接受信号一般包括下面三个组成部分:1)有用的雷达目标回波;2)由于电干扰和雷达设备本身等形成的噪声;3)地面、海面及空中的云雨、干扰箔条等背景形成的杂波。由于杂波信号的强度远远超过目标信号,并且杂波谱常常接近于目标,同时还受雷达设备参数的影响,这些因素增大了雷达对杂波的处理难度。
相参相关Weibull分布海杂波建模与仿真
文章编号:1006-1630(2007)04-0058-04 相参相关Weibull 分布海杂波建模与仿真 宁汀汀,谢亚楠 (上海卫星工程研究所,上海200240) 摘 要:介绍了一种用零记忆非线性变换(ZM NL )模拟具高斯谱特性的相参相关Weibull 分布海杂波的方法。由正交白高斯噪声序列经线性滤波器产生相关的正交高斯序列,用ZM NL 将该序列通过非线性变换为相参相关Weibull 杂波。仿真结果表明,该法形成的海杂波信号与理论值吻合较好,方法可行。 关键词:海杂波;Weibull 分布;相参;相关高斯随机序列;零记忆非线性变换中图分类号:O451 文献标识码:A Modeling and Simulation of Interference C orrelated Weibull Distribution S ea C lutter NING Ting -ting,XIE Ya -nan (Shang hai Institute of Satellit e Eng ineering,Shang hai 200240,China) Abstract :A method of imitating interference correlated Weibull distribution sea clutter w ith Gaussio n spectrum by using zero memory none linearity (ZM NL )transform was put forward in this paper.T he correlated ort hogonal Gaussion sequence w as produced fro m orthogonal white G aussion noise sequence through linear filter.T hen the cor related or thogo nal Gaussion sequence was transferr ed to the interference correlated Weibull clutter thr ough none linear transfo rm by using ZM NL.T he simulat ion showed that the sea clutter acquired by this metho d was agr eed w ith the theoretic one.T he met hod was feasible. Keywords :Sea clutter;Weibull distribution;Interference;Correlated or thog onal Gaussion sequence;Zero memory none linearity tr ansform 收稿日期:2006-08-09;修回日期:2006-10-12 作者简介:宁汀汀(1983 ),女,硕士,主要从事地面动目标检测以及合成孔径雷达信号处理等研究。 0 引言 海杂波是海面回波中雷达显示器中不需要的部 分,它的存在会使目标模糊。杂波的起伏统计特性对雷达目标检测算法设计和杂波相消处理器输入信杂比计算的影响较大,杂波的频谱特性与目标检测和脉冲多普勒滤波器设计相关。因此,快速有效模拟海杂波对雷达系统的设计,以及雷达性能的分析和改善非常重要。 目前,模拟具一定概率分布的随机序列的方法已趋于成熟。形成具一定概率分布的相关随机序列方法也在研究中,其中经典的有两种。一是球不变随机过程法(SIRP),其基本思路是:产生一相关的高斯随机序列,用特定的概率密度函数的随机序列 进行调制[1] 。该法受所求序列的阶数及自相关函 数的限制,且计算量大,不易形成快速算法。二是ZMNL,其基本思路为:产生一相关的高斯随机序列,经某种非线性变换获得需要的相关非高斯随机序列[2]。该法的特点是输入与输出序列间为复杂的非线性关系,因此须寻找输入序列与输出序列相关函数间的非线性对应关系[3]。与SIRP 法相比,ZMNL 法的计算量小,较易形成快速算法,且通用性较好。 本文采用ZM NL,对具高斯谱特性的相参相关Weibull 分布海杂波的建模进行了研究。 1 相关高斯随机序列形成 ZMNL 的原理如图1所示。图中:Y (k )为输入信号W (k )经滤波器H (z )后的函数;A y (k ),ex p ((j (k ))分别为Y (k )经极坐标变换后的幅值和相位部分;A x (k )为A y (k )用ZM NL 经系列非线