GPS坐标转换
gps坐标转换常用方法及转换流程

GPS坐标转换常用方法及转换流程GPS(全球定位系统)坐标转换是将地球上的位置坐标从一种表示方式转换为另一种方式的过程。
这种转换是非常常见的,特别是在地图应用、导航系统和地理信息系统中。
本文将介绍常用的GPS坐标转换方法并提供详细的转换流程。
背景知识在讨论GPS坐标转换之前,首先需要了解一些背景知识。
1. GPS坐标系统GPS坐标系统是用于在地球表面定位和导航的一种坐标系统。
它由经度、纬度和海拔高度组成。
经度表示位置在东西方向上的位置,纬度表示位置在南北方向上的位置,海拔高度表示位置相对于平均海平面的高度。
2. 常用的GPS坐标系统常见的GPS坐标系统包括WGS84和GCJ02坐标系统。
•WGS84坐标系统是一种全球通用的坐标系统,由GPS系统使用。
在大多数情况下,来自GPS设备的原始坐标将使用WGS84。
•GCJ02坐标系统是中国国家测绘局制定的一种坐标系统,用于在中国境内的地图应用中。
GCJ02坐标系统是基于WGS84进行了偏移处理,以保护国家安全。
常用的GPS坐标转换方法在进行GPS坐标转换时,常用的方法包括WGS84转GCJ02和GCJ02转WGS84。
1. WGS84转GCJ02WGS84转GCJ02是将WGS84坐标转换为GCJ02坐标的过程。
由于GCJ02坐标系统在WGS84的基础上进行了偏移处理,所以需要经过一些计算来进行转换。
转换的具体步骤如下:1.将WGS84坐标的经度和纬度分别记为lng和lat。
2.如果lat在1.5以外且lng在48.5以外,则直接返回WGS84坐标。
3.否则,计算新的坐标。
具体计算公式请参考相关的算法。
4.将计算得到的新坐标作为GCJ02坐标返回。
2. GCJ02转WGS84GCJ02转WGS84是将GCJ02坐标转换为WGS84坐标的过程。
由于GCJ02坐标系统相对于WGS84进行了偏移处理,所以需要进行逆运算才能得到原始的WGS84坐标。
转换的具体步骤如下:1.将GCJ02坐标的经度和纬度分别记为lng和lat。
GPS坐标和国家大地坐标之间的转换
GPS坐标和国家大地坐标之间的转换一、前言WGS-84坐标系是目前GPS所采用的坐标系统,GPS所发布的星历参数就是基于此坐标系统的。
WGS-84坐标系统的全称是World Geodical System-84(世界大地坐标系-84),它是一个地心地固坐标系统。
WGS-84坐标系统由美国国防部制图局建立,于1987年取代了当时GPS所采用的坐标系统-WGS-72坐标系统而成为GPS的所使用的坐标系统。
WGS-84坐标系的坐标原点位于地球的质心,轴指向BIH1984.0定义的协议地球极方向,轴指向BIH1984.0的启始子午面和赤道的交点。
采用椭球参数为:a=6 378 137m,f= 1/298.257 223 563。
北京54 坐标系、西安80 坐标系—属于参心坐标系, 北京54 坐标系采用克拉索夫斯基椭球参数,长轴a= 6 3 78 2 4 5 米, 扁率f=l : 2 98.3 ;西安80 大地系坐标系椭球参数采用国际大=地测量和地球物理联合19 7 5 后推荐的地球椭球参数, 长轴a= 6 3 7 8 140 米, 扁率f1 : 298.257,大地原点在我西安市径阳县永乐镇。
西安80 坐标系的建立是在54 年北京坐标系的基础上完成的。
在实际的工作中,对于GPS的测量数据。
我们需要将其转换成所需要的54或80坐标系,才能够使用。
或是将其转换成相应的地方坐标系。
在转换的过程中需要进行一系列的变换。
本文将对其过程做详细的说明。
二、转换过程(1)数据测量:在实际操作中,首先进行的是数据的观测。
根据实际工作需要,采用相应的观测方法进行观测,得到合格的测量成果。
本文主要是针对GPS控制网的转换来说明的。
(2)平差:在GPS控制网的测量工程中,在进行完基线测量(地面坐标和高程)后,需要对测量结果进行平差,得到相应的平差结果。
下面对相应的条件平差①做具体说明:AV-W=0 [1]L#=L+V [2]基础方程和它的解:设有r个平差线性条件方程:[3]式中a i,b i…r i(i=1,2,…n)为条件方程系数,a0,b0…r0为条件方程常数项。
GPS测量中坐标系统、坐标系的转换过程

GPS测量中坐标系统、坐标系的转换过程【摘要】GPS测量中的坐标系统和坐标系转换是利用全球定位系统(GPS)进行地理测量和定位的关键。
本文从引言开始,概述了GPS测量中坐标系统和坐标系的转换过程。
接着介绍了GPS坐标系统的概念和作用,以及常用的坐标系及其特点。
随后详细讨论了GPS坐标系统的转换方法和转换工具,帮助读者更好地理解和应用这些技术。
通过实际案例分析展示了GPS测量中坐标系统和坐标系转换的实际应用。
在总结了本文探讨的内容,并展望了未来GPS测量技术的发展方向。
通过本文的阐述,读者可以更深入地了解GPS测量中坐标系统和坐标系的转换过程,为相关领域的研究和应用提供了参考和指导。
【关键词】GPS测量、坐标系统、坐标系、转换过程、引言、GPS坐标系统、常用坐标系、特点、转换方法、转换工具、实际案例、分析、总结、未来发展、展望1. 引言1.1 GPS测量中坐标系统、坐标系的转换过程概述GPS测量中的坐标系统和坐标系转换是一项关键技术,广泛应用于各种领域。
在现代GPS测量中,我们常常需要将不同坐标系统之间的数据进行转换,以确保数据的准确性和一致性。
在这个过程中,我们需要了解GPS坐标系统的基本原理和常用的坐标系,掌握不同坐标系之间的转换方法,并使用相应的工具进行数据处理和分析。
GPS坐标系统是一种地理坐标系统,由经度、纬度和高度三个参数组成。
常用的坐标系包括WGS84、GCJ-02和BD-09等,它们各有自己的特点和适用范围。
在GPS测量中,我们需要根据具体的需求选择合适的坐标系,并进行必要的转换。
GPS坐标系转换方法包括基本的数学转换和大地测量学方法。
我们可以通过公式计算或使用专业软件来进行坐标系转换,确保数据的准确性和一致性。
一些专门的GPS坐标系转换工具也可以帮助我们快速、准确地实现坐标系转换。
通过实际案例分析,我们可以更好地理解GPS测量中坐标系统和坐标系转换的重要性和实际应用。
结合实际情况,总结经验教训,提出今后改进的方向,并展望未来发展的方向和前景。
GPS数据后处理实现坐标转换的方法与技巧
GPS数据后处理实现坐标转换的方法与技巧GPS(全球定位系统)是一种利用卫星信号确定精确位置的技术,被广泛应用于地理测量、导航和定位等领域。
然而,由于不同国家和地区的坐标系统差异以及GPS测量误差等因素的影响,对于使用GPS获取的坐标数据进行后处理和转换是非常必要的。
在本文中,将探讨一些实现坐标转换的常用方法和技巧。
一、选择合适的转换模型在进行GPS数据后处理时,首先需要确定要使用的坐标转换模型。
常见的坐标转换模型包括七参数、四参数、三参数以及普通的放大、平移和旋转等。
选择合适的模型取决于具体的应用和准确度要求。
例如,如果需要将GPS测量的坐标转换到不同的地理坐标系统上,可以选择使用七参数或四参数模型。
而在局部坐标转换和粗略测量中,普通的平移和旋转可能已足够。
二、使用地理基准数据进行修正GPS测量的坐标通常是基于WGS84(世界大地测量系统)椭球体模型计算得到的。
然而,不同国家和地区可能使用不同的大地水准面或参考基准。
因此,为了准确地将GPS测量的坐标转换到目标坐标系统上,需要使用地理基准数据进行修正。
这些基准数据通常包括大地水准面参数、坐标转换参数和地方大地系统等。
三、考虑GPS测量误差在进行GPS数据后处理时,还需要考虑GPS测量误差对坐标转换的影响。
GPS测量误差包括卫星位置误差、多路径效应、大气延迟和钟差误差等。
为了降低误差对坐标转换精度造成的影响,可以使用差分GPS技术进行实时差分或后续差分处理,以提高测量的准确性。
四、使用专业软件进行数据处理对于较为复杂的坐标转换需求,可以使用专业的地理信息系统(GIS)软件进行数据处理。
这些软件通常具有强大的坐标转换功能和各种专业模型,能够满足不同需求的坐标转换任务。
例如,ArcGIS、AutoCAD和Global Mapper等软件都提供了丰富的坐标转换工具和文档。
五、进行验证和误差分析坐标转换完成后,需要进行验证和误差分析,以评估转换的准确度和可靠性。
GPS坐标和国家大地坐标之间的转换
GPS坐标和国家大地坐标之间的转换一、前言WGS-84坐标系是目前GPS所采用的坐标系统,GPS所发布的星历参数就是基于此坐标系统的。
WGS-84坐标系统的全称是World Geodical System-84(世界大地坐标系-84),它是一个地心地固坐标系统。
WGS-84坐标系统由美国国防部制图局建立,于1987年取代了当时GPS所采用的坐标系统-WGS-72坐标系统而成为GPS的所使用的坐标系统。
WGS-84坐标系的坐标原点位于地球的质心,轴指向BIH1984.0定义的协议地球极方向,轴指向BIH1984.0的启始子午面和赤道的交点。
采用椭球参数为:a=6 378 137m,f= 1/298.257 223 563。
北京54 坐标系、西安80 坐标系—属于参心坐标系, 北京54 坐标系采用克拉索夫斯基椭球参数,长轴a= 6 3 78 2 4 5 米, 扁率f=l : 2 98.3 ;西安80 大地系坐标系椭球参数采用国际大=地测量和地球物理联合19 7 5 后推荐的地球椭球参数, 长轴a= 6 3 7 8 140 米, 扁率f1 : 298.257,大地原点在我西安市径阳县永乐镇。
西安80 坐标系的建立是在54 年北京坐标系的基础上完成的。
在实际的工作中,对于GPS的测量数据。
我们需要将其转换成所需要的54或80坐标系,才能够使用。
或是将其转换成相应的地方坐标系。
在转换的过程中需要进行一系列的变换。
本文将对其过程做详细的说明。
二、转换过程(1)数据测量:在实际操作中,首先进行的是数据的观测。
根据实际工作需要,采用相应的观测方法进行观测,得到合格的测量成果。
本文主要是针对GPS控制网的转换来说明的。
(2)平差:在GPS控制网的测量工程中,在进行完基线测量(地面坐标和高程)后,需要对测量结果进行平差,得到相应的平差结果。
下面对相应的条件平差①做具体说明:AV-W=0 [1]L#=L+V [2]基础方程和它的解:设有r个平差线性条件方程:[3]式中a i,b i…r i(i=1,2,…n)为条件方程系数,a0,b0…r0为条件方程常数项。
GPS测量中的坐标转换与配准方法

GPS测量中的坐标转换与配准方法GPS(全球定位系统)是一种基于卫星的导航系统,用于确定地球上任意位置的准确坐标。
在现代测绘和地理信息系统(GIS)应用中,GPS成为了非常重要的工具。
然而,在实际的测量过程中,不同测量设备、不同测量方法以及数据处理的差异会导致测量结果存在一定的误差。
为了消除这些误差,需要进行坐标转换和配准。
本文将探讨在GPS测量中常用的坐标转换和配准方法。
1. 坐标转换方法坐标转换是将一个坐标系中的坐标点转换到另一个坐标系中的过程。
在GPS测量中,常用的坐标转换方法有以下几种:1.1 七参数法七参数法是一种常用的坐标转换方法,通过确定平移、旋转和尺度参数来实现不同坐标系之间的转换。
该方法适用于相对小范围内的坐标转换。
1.2 高斯投影法高斯投影法是一种将地球表面上的经纬度坐标转换为平面坐标的方法。
利用高斯投影公式,可以将经纬度坐标转换为相应的平面坐标。
该方法适用于大范围的坐标转换。
1.3 直角坐标转经纬度坐标直角坐标转经纬度坐标是一种将直角坐标系下的坐标点转换为经纬度坐标系下的坐标点的方法。
该方法适用于定位导航系统(如GPS)输出的直角坐标点与地理信息系统中的经纬度坐标点的转换。
2. 配准方法配准是将不同数据源或不同时间的数据进行对齐的过程,用于实现数据的一致性和整合性。
在GPS测量中,常用的配准方法有以下几种:2.1 点对点配准点对点配准是一种基于特征点匹配的配准方法,通过寻找两幅图像中的相同特征点,计算其坐标差异,从而实现两幅图像的对齐。
该方法适用于测量设备拍摄的图像与地理信息系统中的地图图像进行配准。
2.2 线性配准线性配准是一种基于直线拟合的配准方法,通过拟合两幅图像中的直线,计算其参数差异,从而实现两幅图像的对齐。
该方法适用于图像中包含直线特征的配准。
2.3 非线性配准非线性配准是一种基于非线性变换模型的配准方法,通过寻找两幅图像中的相似区域,计算其变换参数,从而实现两幅图像的对齐。
GPS坐标系统与参数转换

GPS坐标系统与参数转换GPS坐标值的输出格式有大地坐标系的B、L、H值和通过“用户自定义”方式设置有关参数后输出的高斯投影的平面直角坐标系的公里网格坐标(x、y)值。
我们要转换到BJ-54或C-80坐标系统,可以利用其“用户自定义”方式设置DX、DY、DZ、Da、Df五个参数即可实现。
DX、DY、DZ的计算:在手持式GPS接收机应用的区域内(该区域不宜过大),从当地测绘部门收集3~5个已知点的BJ-54或C-80坐标系统的坐标值,然后在对应的点位上读取WGS-84坐标系的坐标值;将收集到的坐标值根据不同的坐标系按相应转换公式转换为空间坐标系的坐标值,用WGS-84的X84、Y84、Z84分别减去相对应的BJ-54( X54、Y54、Z54)或C-80 (X84、Y84、Z84)的坐标值,即可得出DX、DY、DZ的值;实地对参数检验,实测值与已知值比较,在机器标称精度范围内即可,否则查因重算。
投影分带主要有两种:6度带(每隔经差6度分为一带)和3度带(每隔经差3度分为一带)。
为纵坐标每个带在平面上的投影如右下图所示,每个带设立一个平面直角坐标系,以轴子午线L轴,以子午线与赤道的交点作为坐标系原点,赤道作为横坐标轴。
这样,在轴子午线以东的点,其横坐标y是正值,轴子午线以西的点,其横坐标y是负值。
为了避免在使用成果时可能搞错符号,把纵坐标轴向西平移500公里,这样得到的横坐标y+500的值就永远为正值。
山西的经度介于111°~115°之间,多数处于6°带的第19带内,只有东北部的天镇、灵丘、广灵处于20带内。
其带数可从地形图公里网的横坐标上直接查找得到。
(中央)子午线经度的计算:六度带横坐标的表示方法:带号+横坐标值如:地形图上的横坐标为19365,其中19即为带号;365为横坐标值。
六度带中央子午线经度的计算:中央子午线经度= 带号×6-3如:地形图上的横坐标为19365,其所处的六度带的中央子午线经度为:19×6°-3°=111°,同样计算20带的中央子午线为117°。
GPS测量数据处理中的基线解算与坐标转换方法
GPS测量数据处理中的基线解算与坐标转换方法GPS(全球定位系统)是一种使用卫星技术进行地理测量和定位的先进工具。
在实际的测绘和测量工作中,GPS测量数据处理是一个重要的环节。
其中,基线解算与坐标转换方法是其中的核心内容之一。
基线解算是指根据通过GPS观测得到的卫星观测数据,计算出两个或多个测站之间的距离和方向的过程。
对于两个测站之间的基线,首先需要解算出基线长度,即测站之间的直线距离。
然后,根据相同的基线长度,可以得到基线的坐标方向。
基线解算方法主要有静态基线解算、动态基线解算和RTK(实时动态差分)基线解算。
静态基线解算是利用长时间内(通常为几个小时到一天)的GPS观测数据,通过一些统计学方法计算出基线的精度。
这种方法适用于不需要实时性的测量任务,例如大范围的地形测量和控制网的建立。
静态基线解算的优点是计算结果精度高,但缺点是耗时较长。
动态基线解算是利用运动中的GPS接收机,通过较短时间内的观测数据,计算出基线的精度。
这种方法适用于需要实时性的测量任务,例如航空和航海等应用。
动态基线解算的优点是计算速度快,但相对于静态基线解算,精度稍低。
RTK(实时动态差分)基线解算是一种利用两个或多个接收机之间的无线电链路,进行实时差分校正的方法。
这种方法适用于需要高精度和实时性的测量任务,例如建筑物和道路测量。
RTK基线解算的优点是计算精度高且实时性强,但缺点是对设备的要求较高。
坐标转换是指将GPS观测得到的坐标转换为地理坐标系统或工程坐标系统中的相应坐标的过程。
常用的坐标转换方法有七参数法、四参数法和三参数法等。
七参数法是指通过观测得到的七个参数,包括三个旋转参数、三个平移参数和一个尺度参数,来实现坐标转换的方法。
这种方法适用于大范围的坐标转换,例如全球定位系统和国家坐标系之间的转换。
七参数法的优点是转换精度高,但缺点是计算复杂。
四参数法是指通过观测得到的四个参数,包括两个平移参数和两个尺度参数,来实现坐标转换的方法。
GPS测量常用坐标系统及相互转换
GPS测量常用坐标系统及坐标转换摘要:本文GPS测量常用坐标系统,以及GPS静态、动态测量中坐标变换的参数和方法。
关键词:GPS;坐标系统;坐标转换GPS(Global Positioning System)即全球定位系统,是由美国建立的一个卫星导航定位系统。
它具有全球性、全天候、连续性和实时性的精密三维导航与定位功能,现已广泛用于大地测量、工程测量、航空摄影测量以及地形测量等各个方面。
相对于常规测量来说,GPS 测量具有测量精度高、测站间无需通视、观测时间短、仪器操作简便、全天候作业、可提供三维坐标等特点。
大大地提高了测量效率和精度。
但是由于坐标系统的不同,面临着大量的坐标转换问题。
对GPS技术的推广使用造成了一定的障碍。
本文就GPS测量常用坐标系统及坐标转换的原理和方法,根据作者的理解介绍如下。
一、GPS测量常用坐标系统及投影一个完整的坐标系统是由坐标系和基准两方面要素所构成的。
坐标系指的是描述空间位置的表达形式,而基准指的是为描述空间位置而定义的一系列点、线、面。
在大地测量中的基准一般是指为确定点在空间中的位置,而采用的地球椭球或参考椭球的几何参数和物理参数,及其在空间的定位、定向方式,以及在描述空间位置时所采用的单位长度的定义。
大地基准面是利用特定椭球体对特定地区地球表面的逼近,每个国家或地区均有各自的大地基准面,因此相对同一地理位置,不同的大地基准面,它们的经纬度坐标是有差异的。
基准面是在椭球体基础上建立的,但椭球体不能代表基准面,同样的椭球体能定义不同的基准面。
1、坐标系统的分类1.1、空间直角坐标系空间直角坐标系的坐标系原点位于参考椭球的中心,Z轴指向参考椭球的北极,X轴指向起始子午面与赤道的交点,Y轴位于赤道面上,且按右手系与X轴呈90 夹角。
某点在空间中的坐标可用该点在此坐标系的各个坐标轴上的投影来表示。
1.2、空间大地坐标系空间大地坐标系是采用大地经度(L)、大地纬度(B)和大地高(H)来描述空间位置的。
使用GPS测绘技术进行坐标转换的操作步骤

使用GPS测绘技术进行坐标转换的操作步骤随着科技的发展,GPS(全球定位系统)已经成为现代测绘工作中不可或缺的工具。
它能够在地球上的任何一个角落确定位置,并提供高精度的坐标数据。
坐标转换是GPS测绘技术中一个重要的环节,本文将介绍使用GPS进行坐标转换的操作步骤。
第一步:确定目标坐标系和参考椭球体模型在进行坐标转换之前,我们首先需要确定目标坐标系和参考椭球体模型。
常用的目标坐标系有WGS84、GCJ-02等,而参考椭球体模型则通常选用WGS84参考椭球体。
第二步:收集原始数据在进行坐标转换之前,我们需要先收集到要转换的坐标数据。
这些原始数据可以通过GPS设备、导航软件、地理信息系统等方式获取。
第三步:数据预处理收集到的原始数据可能存在一定的误差和不精确性,因此在进行坐标转换之前,我们需要对数据进行预处理。
这包括进行数据清理、筛选、校正等工作,以提高测量精度。
第四步:选择合适的坐标转换方法根据所需的转换精度和实际情况,我们需要选择合适的坐标转换方法。
常用的转换方法有三参数转换、七参数转换、Molodensky转换等。
选择适当的转换方法是保证坐标转换结果准确性的关键。
第五步:进行坐标转换计算在确定了转换方法之后,我们就可以进行坐标转换的计算了。
根据所选转换方法的不同,我们需要进行相应的数学计算和推导,将原始坐标转换为目标坐标。
第六步:验证转换结果完成坐标转换之后,我们需要对结果进行验证,以确保转换的准确性。
可以通过比对转换后的坐标与已知坐标进行对照,或者进行误差分析等方法,判断转换结果的可靠性。
第七步:修正和优化在验证过程中,如果发现了转换结果的问题,我们需要对原始数据和转换方法进行修正和优化。
这可能包括重新收集数据、调整转换参数、选择其他转换方法等操作。
通过以上步骤,我们可以完成对GPS测绘数据的坐标转换工作。
GPS测绘技术的应用广泛,无论是地理信息系统、导航软件,还是工程测量领域,都需要进行坐标转换。
gps坐标怎么转换

GPS坐标的转换方法1. 介绍GPS(Global Positioning System)全球定位系统是一种由美国提供的导航系统,通过一系列卫星和地面设施确定地球上的位置。
GPS坐标是一种用于标识地理位置的方式,由纬度(Latitude)和经度(Longitude)组成。
在实际应用中,我们可能需要将GPS坐标转换为其他常见的坐标系,如百度坐标系、火星坐标系等。
本文将介绍几种常见的GPS坐标转换方法。
2. WGS84坐标系WGS84坐标系是最广泛使用的GPS坐标系统,它是由全球卫星定位系统所采用的基准系统。
WGS84坐标系下的纬度范围是-90到90,经度范围是-180到180。
3. 百度坐标系百度坐标系是由百度地图采用的一种地理坐标系统。
与WGS84坐标系相比,百度坐标系使用的是BD-09偏移算法,将GPS坐标进行了适量的平移和旋转。
在百度坐标系下,纬度和经度的范围与WGS84坐标系相同。
4. 火星坐标系火星坐标系,也称为国测局坐标系(GCJ-02),是中国国家测绘局在保护国家安全的目的下对GPS数据进行了加密偏移处理的结果。
火星坐标系下的纬度和经度范围与WGS84坐标系相同。
5. GPS坐标转百度坐标将GPS坐标转换为百度坐标可以通过使用百度地图提供的开放API接口实现。
这些API接口可以将GPS坐标作为输入,返回对应的百度坐标。
具体实现方法可以参考百度地图开发者文档中的相关说明。
6. GPS坐标转火星坐标将GPS坐标转换为火星坐标可以使用国测局坐标加密算法实现。
这个算法可以对WGS84坐标进行加密处理,得到火星坐标系下的坐标。
目前有许多开源库可以用于实现此功能,如百度地图的coordtransform库。
7. 火星坐标转GPS坐标将火星坐标转换为GPS坐标可以使用逆加密算法进行。
逆加密算法可以将火星坐标系下的坐标还原为WGS84坐标系下的坐标。
同样,许多开源库可以用于实现此功能。
8. 总结GPS坐标的转换是地理信息处理中的常见问题。
GPS坐标转换成百度坐标的方法共享

GPS坐标转换成百度坐标的方法共享在进行GPS坐标转换为百度坐标时,可以使用以下两种方法:基于地球椭球面参数的经纬度修正法和基于地标偏移的经纬度纠偏法。
1.基于地球椭球面参数的经纬度修正法:这种方法是根据地球椭球面参数来修正GPS坐标的经纬度,从而转换为百度坐标。
具体步骤如下:a.读取GPS坐标的经纬度信息(经度为x,纬度为y);b.根据地球椭球面参数,将经纬度转换为三维空间的坐标(x,y,z);c.根据转换后的三维坐标,通过一系列的公式计算修正后的百度坐标(x',y');d.将修正后的百度坐标作为结果输出。
这种方法的优点是准确度较高,但需要使用复杂的计算公式进行转换。
2.基于地标偏移的经纬度纠偏法:这种方法是通过地标数据库来进行GPS坐标与百度坐标的转换。
具体步骤如下:a.读取GPS坐标的经纬度信息(经度为x,纬度为y);b.根据经纬度查询地标数据库,获得该位置的地标信息;c.根据地标信息,从地标数据库中获取该地标相对于GPS坐标的偏移量(Δx,Δy);d.将GPS坐标的经纬度加上偏移量,得到修正后的百度坐标(x',y');e.将修正后的百度坐标作为结果输出。
这种方法的优点是简单易实现,但准确度可能会受到地标数据库的质量和更新频率的影响。
无论使用哪种方法进行GPS坐标转换为百度坐标,都需要注意以下几点:-经纬度的格式通常为度分秒格式(例如:113°25′23″),需要进行转换为十进制度格式进行计算;-在进行转换时,需要考虑地球椭球面参数和地球自转引起的差异,以提高转换的准确度;-在使用基于地标偏移的经纬度纠偏法时,需要保证地标数据库的质量和更新频率,以提供准确的偏移量。
总结起来,GPS坐标转换成百度坐标的方法主要有两种:基于地球椭球面参数的经纬度修正法和基于地标偏移的经纬度纠偏法。
前者准确度较高,但计算复杂;后者简单易用,但准确度受到地标数据库的影响。
GPS各种地图坐标系转换(转载)
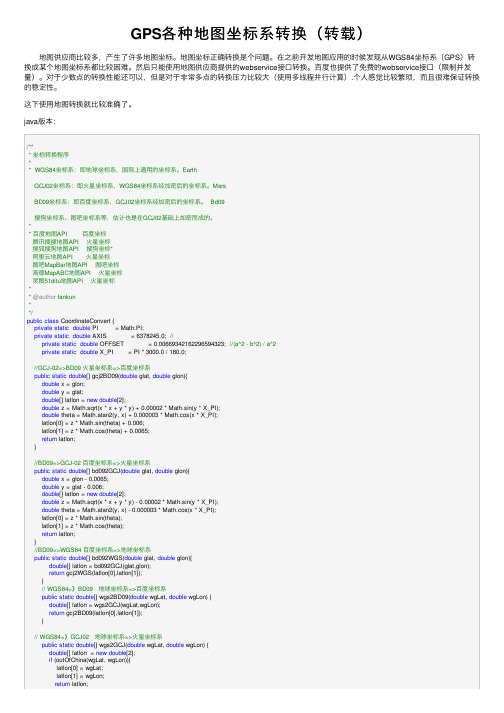
GPS各种地图坐标系转换(转载)地图供应商⽐较多,产⽣了许多地图坐标。
地图坐标正确转换是个问题。
在之前开发地图应⽤的时候发现从WGS84坐标系(GPS)转换成某个地图坐标系都⽐较困难。
然后只能使⽤地图供应商提供的webservice接⼝转换。
百度也提供了免费的webservice接⼝(限制并发量)。
对于少数点的转换性能还可以,但是对于⾮常多点的转换压⼒⽐较⼤(使⽤多线程并⾏计算).个⼈感觉⽐较繁琐,⽽且很难保证转换的稳定性。
这下使⽤地图转换就⽐较准确了。
java版本:/*** 坐标转换程序** WGS84坐标系:即地球坐标系,国际上通⽤的坐标系。
EarthGCJ02坐标系:即⽕星坐标系,WGS84坐标系经加密后的坐标系。
MarsBD09坐标系:即百度坐标系,GCJ02坐标系经加密后的坐标系。
Bd09搜狗坐标系、图吧坐标系等,估计也是在GCJ02基础上加密⽽成的。
** 百度地图API 百度坐标腾讯搜搜地图API ⽕星坐标搜狐搜狗地图API 搜狗坐标*阿⾥云地图API ⽕星坐标图吧MapBar地图API 图吧坐标⾼德MapABC地图API ⽕星坐标灵图51ditu地图API ⽕星坐标** @author fankun**/public class CoordinateConvert {private static double PI = Math.PI;private static double AXIS = 6378245.0; //private static double OFFSET = 0.00669342162296594323; //(a^2 - b^2) / a^2private static double X_PI = PI * 3000.0 / 180.0;//GCJ-02=>BD09 ⽕星坐标系=>百度坐标系public static double[] gcj2BD09(double glat, double glon){double x = glon;double y = glat;double[] latlon = new double[2];double z = Math.sqrt(x * x + y * y) + 0.00002 * Math.sin(y * X_PI);double theta = Math.atan2(y, x) + 0.000003 * Math.cos(x * X_PI);latlon[0] = z * Math.sin(theta) + 0.006;latlon[1] = z * Math.cos(theta) + 0.0065;return latlon;}//BD09=>GCJ-02 百度坐标系=>⽕星坐标系public static double[] bd092GCJ(double glat, double glon){double x = glon - 0.0065;double y = glat - 0.006;double[] latlon = new double[2];double z = Math.sqrt(x * x + y * y) - 0.00002 * Math.sin(y * X_PI);double theta = Math.atan2(y, x) - 0.000003 * Math.cos(x * X_PI);latlon[0] = z * Math.sin(theta);latlon[1] = z * Math.cos(theta);return latlon;}//BD09=>WGS84 百度坐标系=>地球坐标系public static double[] bd092WGS(double glat, double glon){double[] latlon = bd092GCJ(glat,glon);return gcj2WGS(latlon[0],latlon[1]);}// WGS84=》BD09 地球坐标系=>百度坐标系public static double[] wgs2BD09(double wgLat, double wgLon) {double[] latlon = wgs2GCJ(wgLat,wgLon);return gcj2BD09(latlon[0],latlon[1]);}// WGS84=》GCJ02 地球坐标系=>⽕星坐标系public static double[] wgs2GCJ(double wgLat, double wgLon) {double[] latlon = new double[2];if (outOfChina(wgLat, wgLon)){latlon[0] = wgLat;latlon[1] = wgLon;return latlon;}double[] deltaD = delta(wgLat,wgLon);latlon[0] = wgLat + deltaD[0];latlon[1] = wgLon + deltaD[1];return latlon;}//GCJ02=>WGS84 ⽕星坐标系=>地球坐标系(粗略)public static double[] gcj2WGS(double glat,double glon){double[] latlon = new double[2];if (outOfChina(glat, glon)){latlon[0] = glat;latlon[1] = glon;return latlon;}double[] deltaD = delta(glat,glon);latlon[0] = glat - deltaD[0];latlon[1] = glon - deltaD[1];return latlon;}//GCJ02=>WGS84 ⽕星坐标系=>地球坐标系(精确)public static double[] gcj2WGSExactly(double gcjLat,double gcjLon){double initDelta = 0.01;double threshold = 0.000000001;double dLat = initDelta, dLon = initDelta;double mLat = gcjLat - dLat, mLon = gcjLon - dLon;double pLat = gcjLat + dLat, pLon = gcjLon + dLon;double wgsLat, wgsLon, i = 0;while (true) {wgsLat = (mLat + pLat) / 2;wgsLon = (mLon + pLon) / 2;double[] tmp = wgs2GCJ(wgsLat, wgsLon);dLat = tmp[0] - gcjLat;dLon = tmp[1] - gcjLon;if ((Math.abs(dLat) < threshold) && (Math.abs(dLon) < threshold))break;if (dLat > 0) pLat = wgsLat; else mLat = wgsLat;if (dLon > 0) pLon = wgsLon; else mLon = wgsLon;if (++i > 10000) break;}double[] latlon = new double[2];latlon[0] = wgsLat;latlon[1] = wgsLon;return latlon;}//两点距离public static double distance(double latA, double logA, double latB,double logB){int earthR = 6371000;double x = Math.cos(latA*Math.PI/180) * Math.cos(latB*Math.PI/180) * Math.cos((logA-logB)*Math.PI/180);double y = Math.sin(latA*Math.PI/180) * Math.sin(latB*Math.PI/180);double s = x + y;if (s > 1)s = 1;if (s < -1)s = -1;double alpha = Math.acos(s);double distance = alpha * earthR;return distance;}public static double[] delta(double wgLat, double wgLon){double[] latlng = new double[2];double dLat = transformLat(wgLon - 105.0, wgLat - 35.0);double dLon = transformLon(wgLon - 105.0, wgLat - 35.0);double radLat = wgLat / 180.0 * PI;double magic = Math.sin(radLat);magic = 1 - OFFSET * magic * magic;double sqrtMagic = Math.sqrt(magic);dLat = (dLat * 180.0) / ((AXIS * (1 - OFFSET)) / (magic * sqrtMagic) * PI);dLon = (dLon * 180.0) / (AXIS / sqrtMagic * Math.cos(radLat) * PI);latlng[0] =dLat;latlng[1] =dLon;return latlng;}public static boolean outOfChina(double lat, double lon){if (lon < 72.004 || lon > 137.8347)return true;if (lat < 0.8293 || lat > 55.8271)return true;return false;}public static double transformLat(double x, double y){double ret = -100.0 + 2.0 * x + 3.0 * y + 0.2 * y * y + 0.1 * x * y + 0.2 * Math.sqrt(Math.abs(x)); ret += (20.0 * Math.sin(6.0 * x * PI) + 20.0 * Math.sin(2.0 * x * PI)) * 2.0 / 3.0;ret += (20.0 * Math.sin(y * PI) + 40.0 * Math.sin(y / 3.0 * PI)) * 2.0 / 3.0;ret += (160.0 * Math.sin(y / 12.0 * PI) + 320 * Math.sin(y * PI / 30.0)) * 2.0 / 3.0;return ret;}public static double transformLon(double x, double y){double ret = 300.0 + x + 2.0 * y + 0.1 * x * x + 0.1 * x * y + 0.1 * Math.sqrt(Math.abs(x));ret += (20.0 * Math.sin(6.0 * x * PI) + 20.0 * Math.sin(2.0 * x * PI)) * 2.0 / 3.0;ret += (20.0 * Math.sin(x * PI) + 40.0 * Math.sin(x / 3.0 * PI)) * 2.0 / 3.0;ret += (150.0 * Math.sin(x / 12.0 * PI) + 300.0 * Math.sin(x / 30.0 * PI)) * 2.0 / 3.0;return ret;}}。
GPS测量中坐标系之间的转换
GPS测量中的坐标系转换第一章绪论1.1概述坐标转化并不是一个新的课题,随着测绘事业的发展,全球一体化的形成,越来越要求全球测绘资料的统一。
尤其是在坐标系统的统一方面.原始的大地测量工作主要是依靠光学仪器进行,这样不免受到近地面大气的影响,同时受地球曲率的影响很大,在通视条件上受到很大的限制,从而对全球测绘资料的一体化产生巨大的约束性。
另外由于每一个国家的大地坐标系的建立和发展具有一定的历史特性,仅常用的大地坐标系就有150余个。
在同一个国家,在不同的历史时期由于习惯的改变或经济的发展变化也会采用不同的坐标系统。
例如:在我国建国之后,为了尽快搞好基础建设,我国采用了应用克氏椭球与我国实际相结合的北京54坐标系;随着经济的发展北京54坐标系的缺陷也随之被表露的越来越明显,特别是对我国经济较发达的东南沿海地区的影响表现得更为明显,进而我国开始研究并使用国家80坐标系。
在实际生活中,在一些地区由于国家建设的急需,来不及布设国家统一的大地控制网,而建立局部的独立坐标系。
而后,再将其转换到国家统一的大地控制网中,这些坐标系的变换都离不开坐标值的转化.在国际上,随着1964年美国海军武器实验室对第一代卫星导航系统─NNSS的研制成功,为测绘资料的全球一体化提供了可能。
到1972年,经过美国国防部的批准,开始了第二代卫星导航系统的开发研究工作,即为现在所说的GPS。
此套卫星导航系统满足了全球范围、全天候、连续实时以及三维导航和定位的要求.正是由于GPS卫星的这些特性,这种技术就很快被广大测绘工作者接受。
是由于坐标系统的不同,对GPS技术的推广使用造成了一定的障碍。
这样坐标转换的问题再一次被提到了重要的位置。
为了描述卫星运动,处理观测数据和表示测站位置,需要建立与之相应的坐标系统。
在GPS测量中,通常采用两种坐标系统,即协议天球坐标系和协议地球坐标系。
其中协议地球坐标系采用的是1984年世界大地坐标系(Word Geodetic System 1984─WGS-84)其主要参数为:长半轴 a=6378137; 扁率 f=1:298.257223563.而我国采用的坐标系并不是WGS-84坐标系而是BJ-54坐标系,这个坐标系是与前苏联的1942年普耳科沃坐标系有关的,其主要参数为: 长半轴 a=6378245; 扁率 f=1:298.3.这就使得同一点在不同的坐标系下有不同的坐标值,这样使测绘资料的使用范围受到很大的限制,并且对GPS系统在我国的广泛使用造成了一定的约束性,对我国的测绘事业的发展不利。
使用GPS数据进行坐标转换与纠正的操作方法

使用GPS数据进行坐标转换与纠正的操作方法GPS(全球卫星定位系统)是一项先进的技术,它利用卫星信号来确定地球上任何点的精确位置。
在现代导航和定位系统中,GPS已经成为一种标配。
然而,在使用GPS数据时,我们有时需要将坐标进行转换和纠正,以便更好地满足实际需求。
本文将介绍使用GPS数据进行坐标转换和纠正的操作方法。
1. 数据收集首先,我们需要收集GPS数据。
可以通过不同的设备和方法获取GPS数据,如GPS接收器、智能手机、车载导航系统等。
无论使用何种方法,确保数据的准确性和完整性非常重要。
在使用设备进行数据收集时,确保设备处于开启状态,并且可以接收到足够的卫星信号。
2. 坐标转换在进行坐标转换之前,我们需要确定数据的初始坐标系统。
地球上有多种不同的坐标系统,如WGS 84、GCJ-02和BD-09等。
根据实际需求和使用场景,选择合适的初始坐标系统。
然后,我们可以利用不同的工具和软件进行坐标转换。
有许多免费和商业化的软件供我们选择,如ArcGIS、Google Earth和在线坐标转换工具等。
根据具体情况选择最适合的工具,并按照工具的操作流程进行具体的坐标转换。
3. 数据纠正在数据收集和处理过程中,可能会出现误差和偏差。
这些误差和偏差可能来自各种原因,如设备精度、大气条件、信号遮挡等。
为了纠正这些误差和偏差,我们可以采用一些常用的方法。
首先,可以利用差分GPS技术来提高测量的精度。
差分GPS技术通过同时接收参考站和移动站的GPS信号,计算两者之间的差异,从而纠正误差。
此外,还可以利用地面控制点来进行数据纠正。
地面控制点是已知位置的点,在数据处理过程中,我们可以将GPS数据与地面控制点进行比对,从而补偿误差和偏差。
4. 软件应用除了传统的软件工具,还可以利用一些特殊的软件应用来进行坐标转换和纠正。
例如,可以使用GIS软件进行坐标转换和纠正,并结合地图数据进行可视化展示。
此外,还可以利用基于云计算的在线软件,实现大规模的坐标转换和纠正操作。
GPS手持机坐标数据转换及在mapgis下自动成图的方法
GPS手持机坐标数据转换及在mapgis下自动成图的方法一、GPS手持机坐标数据转换目前,我国地矿系统及测绘系统通常采用BJ1954坐标系,而Garmin手持机中未提供该坐标系,如何进行转换呢?可以通过用户自定义的方式来实现。
方法如下:1、进入"主菜单页面"的"设置"子页面中,按动方向键选择“单位”按输入键进入坐标设置的页面,将"位置格式"的选项改为" UserUTM Grid "(自定义坐标格式)。
2、在出现的参数输入页面中输入相关的参数,包括中央经线,投影比例(该数值为1),东西偏差(该数值为500000),南北偏差(该数值为0)。
3、按下屏幕上的"存储"按钮后,再将"地图基准"(有的机器称之为"坐标系统")的选项改为"User"(自定义坐标系统)。
4、在出现的参数输入页面中输入相关参数,包括DX,DY,DZ,DA和DF。
其中DA的数值为-108,DF的数值为0.0000005。
按下屏幕上的"存储"按钮后,机器显示的位置将用北京54坐标来表示了。
如果是80坐标,则DA=-3,DF=0。
5、DX,DY,DZ三个参数因地区而异,具体如何求解可以让他们首先与本地测绘部门去咨询,如果不给的话,可以通过如下方法来求解:首先知道一个点的已知BJ54坐标,然后用手持机测此点的坐标(WGS84坐标),通过坐标转换程序,即可求出DX,DY,DZ。
需要注意的是,此程序中的y为6位数,也就是要将Bj54坐标中的前两位(带数)去掉。
如果不知道BJ 54坐标的高程,可以输入与WGS84坐标相同的即可(使用的坐标转换程序EasyPar可以去北京合众思壮科技有限责任公司网站下载)。
通过上述设置后,即将本机坐标系转换为BJ54坐标系。
mapgis下自动成图的方法1、在计算机上安装Garmin手持机系列的mapsource软件。
GPS测量中的坐标系统及其转换
在GPS测量中通常采用两类坐标系统,一类是在空间固定的坐标系统,另一类是与地球体相固联的坐标系统,也称固定坐标系统。
如:WGS-84世界大地坐标系和1980年西安大地坐标系。
在实际使用中需要根据坐标系统间的转换参数进行坐标系统的变换,来求出所使用的坐标系统的坐标。
这样更有利于表达地面控制点的位置和处理GPS观测成果,因此在GPS测量中得到了广泛的应用。
1 坐标系统的介绍1.1 WGS—84坐标系统WGS—84坐标系是目前GPS所采用的坐标系统,是由美国国防部制图局建立,于1987年取代了当时GPS所采用的坐标系统(WGS—72坐标系统)而成为GPS目前所使用的坐标系统。
WGS—84坐标系的坐标原点位于地球的质心,Z轴指向BIHl984.0定义的协议地球极方向,X轴指向 BIHl984.0的起始子午面和赤道的交点,Y轴与X轴和Z轴构成右手系。
WGS—84系所采用椭球参数为:a=6378138m;f=1/298.257223563。
1.2 1954年北京坐标系1954年北京坐标系是我国目前广泛采用的大地测量坐标系。
该坐标系源自于原苏联采用过的1942年普尔科夫坐标系。
建国前,我国没有统一的大地坐标系统,建国初期,在苏联专家的建议下,我国根据当时的具体情况,建立起了全国统一的1954年北京坐标系。
该坐标采用的参考椭球是克拉索夫斯基椭球,该椭球的参数为:a=6378245m;f=1/298.3。
该椭球并未依据当时我国的天文观测资料进行重新定位。
而是由前苏联西伯利亚地区的一等锁,经我国的东北地区传算过来的,该坐标的高程异常是以前苏联1955年大地水准面重新平差的结果为起算值,按我国天文水准路线推算出来的,而高程又是以1956年青岛验潮站的黄海平均海水面为基准。
1.3 1980年西安坐标系1980年西安坐标系采用了全面描述椭球性质的四个基本参数a 、GM、J2、ω。
四个参数的数值采用的是1975年国际大地测量与地球物理联合会16届大会的推荐值:a=6378140m;GM=3986005x108m3/s2;J2=1082.63x10-6;ω=7292115X10-11rad/s.1980年西安坐标系的原点位于我国的中部,陕西西安市的附近。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
GPS坐标转换1坐标系统的介绍1.1WGS—84坐标系统WGS—84坐标系是目前GPS所采用的坐标系统,是由美国国防部制图局建立,于1987年取代了当时GPS所采用的坐标系统(WGS—72坐标系统)而成为GPS目前所使用的坐标系统。
WGS—84坐标系的坐标原点位于地球的质心,Z轴指向BIHl984.0定义的协议地球极方向,X轴指向BIHl984.0的起始子午面和赤道的交点,Y轴与X轴和Z轴构成右手系。
WGS—84系所采用椭球参数为:a=6378138m;f=1/298.257223563。
1.21954年北京坐标系1954年北京坐标系是我国目前广泛采用的大地测量坐标系。
该坐标系源自于原苏联采用过的1942年普尔科夫坐标系。
建国前,我国没有统一的大地坐标系统,建国初期,在苏联专家的建议下,我国根据当时的具体情况,建立起了全国统一的1954年北京坐标系。
该坐标采用的参考椭球是克拉索夫斯基椭球,该椭球的参数为:a=6378245m;f=1/298.3。
该椭球并未依据当时我国的天文观测资料进行重新定位。
而是由前苏联西伯利亚地区的一等锁,经我国的东北地区传算过来的,该坐标的高程异常是以前苏联1955年大地水准面重新平差的结果为起算值,按我国天文水准路线推算出来的,而高程又是以1956年青岛验潮站的黄海平均海水面为基准。
1.3 1980年西安坐标系1980年西安坐标系采用了全面描述椭球性质的四个基本参数a、GM、J2、ω。
四个参数的数值采用的是1975年国际大地测量与地球物理联合会16届大会的推荐值:a=6378140m;GM=3986005x108m3/s2;J2=1082.63x10-6;ω=7292115X10-11rad/s.1980年西安坐标系的原点位于我国的中部,陕西西安市的附近。
椭球的短轴平行于由地球质心指向我国地极原点JYD1968。
0的方向,起始大地子午面平行与我国起始天文子午面。
大地点的高程是1956年青岛验潮站的黄海平均海水面为基准。
2坐标系统的转换一般情况下,我们使用的是1954年北京坐标系或1980年西安坐标系,而GPS测定的坐标是WGS-84坐标系坐标,需要进行坐标系转换。
对于非测量专业的工作人员来说,虽然GPS定位操作非常容易,但坐标转换则难以掌握,EXCEL是比较普及的电子表格软件,能够处理较复杂的数学运算,用它的公式编辑功能,进行GPS坐标转换,会非常轻松自如。
要进行坐标系转换,离不开高斯投影换算,下面分别介绍用EXCEL进行换算的方法和GPS坐标转换方法。
2.1用EXCEL进行高斯投影换算从经纬度BL换算到高斯平面直角坐标XY(高斯投影正算),或从XY换算成BL(高斯投影反算),一般需要专用计算机软件完成,在目前流行的换算软件中,大都需要一个点一个点地进行,不能成批量地完成,给实际工作中带来了许多不便。
但是,通过实验发现,用EXCEL可以很直观、方便地完成坐标换算工作,只需要在EXCEL的相应单元格中输入相应的公式即可。
下面以54坐标系为例,介绍具体的计算方法。
完成经纬度BL到平面直角坐标XY的换算。
在EXCEL中,选择输入公式的起始单元格,例如:第2行第1列(A2格)为起始单元格,各单元格的格式如下:、单元格;单元格内容;说明A2;输入中央子午线,以度.分秒形式输入,如115度30分则输入115.30;起算数据L0B2;=INT(A2)+(INT(A2*100)-INT(A2)*100)/60+(A2*10000-INT(A2*100 )*100)/3600;把L0化成度C2;以度小数形式输入纬度值,如38°14′20″则输入38.1420;起算数据BD2;以度小数形式输入经度值;起算数据LE2;=INT(C2)+(INT(C2*100)-INT(C2)*100)/60+(C2*10000-INT(C2*100 )*100)/3600;把B化成度F2;=INT(D2)+(INT(D2*100)-INT(D2)*100)/60+(D2*10000-INT(D2*100 )*100)/3600;把L化成度G2;=F2-B2;L-L0H2;=G2/57.2957795130823;化作弧度I2;=TAN(RADIANS(E2));Tan(B)J2;=COS(RADIANS(E2));COS(B)K2;=0.006738525415*J2*J2L2;=I2*I2M2;=1+K2N2;=6399698.9018/SQRT(M2)O2;=H2*H2*J2*J2P2;=I2*J2Q2;=P2*P2R2;=(32005.78006+Q2*(133.92133+Q2*0.7031))S2;=6367558.49686*E2/57.29577951308-P2*J2*R2+((((L2-58)*L2+61 )*O2/30+(4*K2+5)*M2-L2)*O2/12+1)*N2*I2*O2/2计算结果XT2;=((((L2-18)*L2-(58*L2-14)*K2+5)*O2/20+M2-L2)*O2/6+1)*N2*(H 2*J2)计算结果Y按上面表格中的公式输入到相应单元格后,就可方便地由经纬度求得平面直角坐标。
当输入完所有的经纬度后,用鼠标下拉即可得到所有的计算结果。
表中的许多单元格公式为中间过程,可以用EXCEL 的列隐藏功能把这些没有必要显示的列隐藏起来,表面上形成标准的计算报表,使整个计算表简单明了。
从理论上讲,可计算的数据量是无限的,当第一次输入公式后,相当于自己完成了一软件的编制,可另存起来供今后重复使用。
2.2GPS坐标转换方法GPS所采用的坐标系是美国国防部1984世界坐标系,简称WGS-84,它是一个协议地球参考系,坐标系原点在地球质心。
GPS的测量结果与我国的54系或80系坐标相差几十米至一百多米,随区域不同,差别也不同。
由此可见,必须将WGS-84坐标进行坐标系转换才能供标图使用。
坐标系之间的转换一般采用七参数法或三参数法,其中七参数为X平移、Y平移、Z平移、X旋转、Y旋转、Z旋转以及尺度比参数,若忽略旋转参数和尺度比参数则为三参数方法,三参数法为七参数法的特例。
这里的X、Y、Z是空间大地直角坐标系坐标,原理是:不把GPS所测定的WGS-84坐标当作WGS-84坐标,而是当作具有一定系统性误差的54系坐标值,然后通过国家已知点纠正,消除该系统误差。
下面以WGS-84坐标转换成54系坐标为例,介绍数据处理方法:首先,在测区附近选择一国家已知点,在该已知点上用GPS测定WGPS-84坐标系经纬度B和L,把此坐标视为有误差的54系坐标,利用54系EXCEL将经纬度BL转换成平面直角坐标X’Y’,然后与已知坐标比较则可计算出偏移量:△X=X-X’△△Y=Y-Y’△式中的X、Y为国家控制点的已知坐标,X’、Y’为测定坐标,△X和△Y为偏移量。
△求得偏移量后,就可以用此偏移量纠正测区内的其他测量点了。
把其他GPS测量点的经纬度测量值,转换成平面坐标X’Y’,在此XY坐标值上直接加上偏移值就得到了转换后的54系坐标:△X=X’+△X△Y=Y’+△Y△在上述EXCEL计算表的最后两列,附加上求得的改正数并分别与计算出来的XY相加后,即得到转换结果。
就1:1万比例尺成图而言,在一般的县行政区范围内(如40Km×40Km),用此简单的坐标改正法进行转换与较复杂的七参数法没有多大差别。
能否满足1:1万比例尺变更调查的要求,主要取决于GPS接收机本身的精度,与转换方法的选择关系不大。
当面积较大时,使用该方法可能会使误差增大,这时可考虑分区域转换。
△西安80坐标系与北京54坐标系其实是一种椭球参数的转换作为这种转换在同一个椭球里的转换都是严密的,而在不同的椭球之间的转换是不严密,因此不存在一套转换参数可以全国通用的,在每个地方会不一样,因为它们是两个不同的椭球基准。
△那么,两个椭球间的坐标转换,一般而言比较严密的是用七参数布尔莎模型,即X平移,Y平移,Z平移,X旋转(WX),Y旋转(WY),Z旋转(WZ),尺度变化(DM)。
要求得七参数就需要在一个地区需要3个以上的已知点。
如果区域范围不大,最远点间的距离不大于30Km(经验值),这可以用三参数,即X平移,Y平移,Z平移,而将X旋转,Y旋转,Z旋转,尺度变化面DM视为0。
△方法如下(MAPGIS平台中):△第一步:向地方测绘局(或其它地方)找本区域三个公共点坐标对(即54坐标x,y,z和80坐标x,y,z);△第二步:将三个点的坐标对全部转换以弧度为单位。
(菜单:投影转换/输入单点投影转换,计算出这三个点的弧度值并记录下来)△第三步:求公共点求操作系数(菜单:投影转换/坐标系转换)。
如果求出转换系数后,记录下来。
第四步:编辑坐标转换系数。
(菜单:投影转换/编辑坐标转换系数。
)最后进行投影变换,“当前投影”输入80坐标系参数,“目的投影”输入54坐标系参数。
进行转换时系统会自动调用曾编辑过的坐标转换系数。
△3结论△在使用GPS测量中,外业的观测简单、快捷,内业数据的计算可以通过相应的软件直接得到WGS-84的坐标。
为了将其转换为常用的BJ-54或XA-80坐标,常常使测量人员比较棘手。
本文论述了用EXCEL进行坐标转换的方法,在小测区面积范围内可以直接使用,在大测区面积范围内分区使用,给测量的计算带来了很大的方便。