四等控制网测量技术要求
四等水准测量规范
四等及等外水准测量水准测量国家水准测量依精度不同分为一、二、三、四等。
一、二等水准测量是国家高程控制的全面基础,三、四等水准测量直接为地形测图和各种工程建设提供所必须的高程控制。
精度低于四等的水准测量称为等外水准测量。
本节阐述四等及等外水准测量的布设形式、技术要求、选点埋石、外业施测和内业计算等有关内容。
一、水准路线的布设形式由水准原点或任一已知高程点出发进行水准测量所经过的路线称为水准路线。
水准路线每隔一定的距离需要埋设一个固定点,称为水准点。
水准测量的目的就是以已知高程点为起算点,沿选定的水准路线逐站测定各水准点的高程。
根据已知水准点的情况和测量工作的实际需要,水准路线可以布设成以下三种形式。
(1) 附合水准路线:从一已知高程的水准点出发,进行水准测量,最后附合到另一已知高程的水准点上。
(2) 闭合水准路线:从一已知高程的水准点出发,沿一条环形路线进行水准测量,测定沿线上水准点的高程,最后又回到该水准点。
(3) 支水准路线:从一已知高程的水准点出发,沿一条水准路线测定沿线上其他水准点的高程,最后不与任一已知高程点连测。
为了提高成果的精度及其可靠性,规范规定支水准路线必须进行往返观测或单程双转点观测,且应限制支水准路线的长度。
(4)水准网二、四等及等外水准测量的主要技术要求各等水准测量对所使用的仪器类型、水准路线长度、不符值或闭合差的限差等都有相应的规定,其中四等及等外水准测量的主要技术要求如表4-27所列。
三、水准路线选线和水准标石埋设(1)收集资料在确定水准路线布设形式之前,首先要收集已有的水准测量资料,包括水准路线图、水准点“点之记”、成果表、技术总结等。
而且还应到实地调查,确定已知成果可否利用。
(2)图上初步选线在测区已有的地形图上设计拟定的水准路线。
水准路线应尽量选设在地势平坦、土质坚实、施测方便的道路附近,尽量避免通过水滩、沙土、易塌陷易受雨水冲刷的地区。
选线的同时还应考虑水准点的埋设位置。
四等导线测量规范
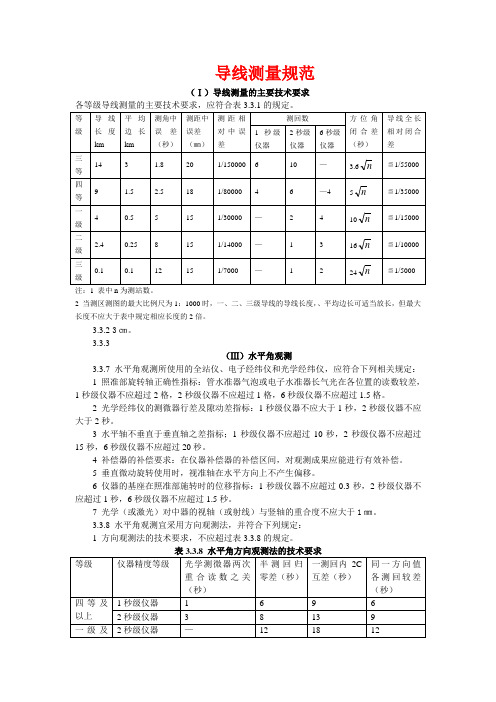
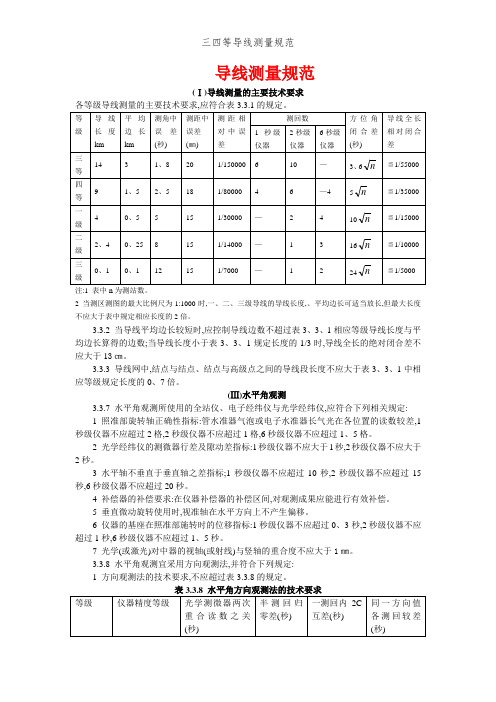
导线测量规范(Ⅰ)导线测量的主要技术要求各等级导线测量的主要技术要求,应符合表3.3.1的规定。
注:1 表中n为测站数。
2 当测区测图的最大比例尺为1:1000时,一、二、三级导线的导线长度,、平均边长可适当放长,但最大长度不应大于表中规定相应长度的2倍。
3.3.2 3㎝。
3.3.3(Ⅲ)水平角观测3.3.7 水平角观测所使用的全站仪、电子经纬仪和光学经纬仪,应符合下列相关规定:1 照准部旋转轴正确性指标:管水准器气泡或电子水准器长气光在各位置的读数较差,1秒级仪器不应超过2格,2秒级仪器不应超过1格,6秒级仪器不应超过1.5格。
2 光学经纬仪的测微器行差及隙动差指标:1秒级仪器不应大于1秒,2秒级仪器不应大于2秒。
3 水平轴不垂直于垂直轴之差指标;1秒级仪器不应超过10秒,2秒级仪器不应超过15秒,6秒级仪器不应超过20秒。
4 补偿器的补偿要求:在仪器补偿器的补偿区间,对观测成果应能进行有效补偿。
5 垂直微动旋转使用时,视准轴在水平方向上不产生偏移。
6 仪器的基座在照准部施转时的位移指标:1秒级仪器不应超过0.3秒,2秒级仪器不应超过1秒,6秒级仪器不应超过1.5秒。
7 光学(或激光)对中器的视轴(或射线)与竖轴的重合度不应大于1㎜。
3.3.8 水平角观测宜采用方向观测法,并符合下列规定:1 方向观测法的技术要求,不应超过表3.3.8的规定。
表3.3.8水平角方向观测法的技术要求注;1 全站仪、电子经纬仪水平角观测时不受光学测微器两次重合读数之差指标的限制。
2 当观测方向的垂直角超过±30的范围时,该方向2C互差可按相邻测回同方向进行比较,其值应满足表中一测回内2C互差的限值。
2 当观测方向不多于3个时,可不归零。
3 当观测方向多于6个时,可进行分组观测。
分组观测应包括两个共同方向(其中一个为共同零方向)。
其两组观测角之差,不应大于同等级测角中误差的2倍。
分组观测的最后结果,应按等权分组观测进行测站平差。
南京市江北地区四等GPS控制网测量技术设计
南京市江北地区四等GPS控制网测量技术设计一、概况由于南京市江北地区市政建设的高速发展,上个世纪八十年代在江北地区布设的三、四等三角网、一级GPS网以及I级导线网遭到了严重的破坏,致使该地区的各项测量工作难以开展。
根据市委、市政府要求,对江北地区加大规划监管力度的同时,在江北地区尽快全面布设、建立四等GPS控制网,为江北地区的基础测绘提供测量依据。
1.地理位置东经:118度30分至119度00分;北纬:31度50分至32度37分。
2.测区范围汤泉镇、桥林镇一线以东,浦口区行政区域;十二里茶棚、八百里桥一线,以南六合区行政区域。
面积约1400平方公里,行政隶属南京市。
3.测区状况测区内主要城镇有大厂、浦口、东门、珠江、汤泉、桥林、雄洲、程桥、八百里桥、新篁、横梁、新集、东沟、瓜埠、葛塘、龙袍、长芦,其余多为散列式农庄;大型厂矿有南化公司、南京钢铁集团、南京热电厂、南京高新技术产业开发区、扬子石化公司;高等学校有陆军指挥学院、南京工业大学、南京大学等;浦口测区内有海拔高度在280米至350米之间的二顶山、黄山岭等低山,它们顺着浦口测区的走向,由东北向西南排列位于浦口测区的中央,国家级老山森林公园、珍珠泉公园就位于这个区域,这里植被茂盛,树木参天,覆盖面积约15平方公里;六合测区有方山、灵岩山、马头山、龙王山,海拔高度最高为180米。
测区内其余地势较为平坦,多在10到20米之间。
主要道路有宁合高速公路、宁连一级公路、浦珠路、浦泗路,宁扬公路,其它区级道路四通八达。
测区位于长江中下游,属亚热带温湿气候,年平均降雨量约1024毫升,年平均气温在22度左右,东夏气温相差较大,一般在零下10度至40度之间。
二、测区已有控制点及其利用1、平面控制:测区内现有二等三角控制网(见附图1)是由南京市测绘勘察研究院有限公司1992年布设的,每个二等三角点都拥有54北京坐标系成果、80西安坐标系成果和92南京地方坐标系成果。
国家三、四等水准测量规范
国家三、四等水准测量规范
1、简介
国家三、四等水准测量规范的主要内容是针对汇总、国家三、四等水准测量控制测量标准以及其他相关事项的规定。
本规范适用于新绘制或改绘自然科学类及利用水准测量技术支持的工程项目的测量。
2、术语
(1) 水准测量: 指在平地或高程较低的陡坡上对水准线以及高程点进行测量、校准和绘制。
(2) 机械控制水准测量: 指利用水准仪或经纬仪进行水准测量,包括基础控制测量、联网控制测量、控制测量和大地平差。
(3) 国家三等水准测量: 国家三等水准测量是国家规定的一种普通水准测量,它的目的是为了满足一般水下测量的要求,它的准确度要求较低。
3、权限
任何取得国家三、四等水准测量许可的机构或者从业人员,都可以从事国家三、四等水准测量活动。
4、设备
国家三等水准测量可以使用机械控制水准仪,它的准确度达到1:5000。
国家四等水准测量则可以使用激光投影水准仪,其准确度可达到1:10 000。
5、测量程序
(1) 测量预备工作: 首先要完成作业方案的编制以及相关设备的准备及检查工作,以及对特殊情况的考虑,以确保测量质量。
(2) 测量实施: 按照作业方案要求检查设备,校核照明条件和测量精度,依次进行机械控制、联网控制、控制测量和大地平差等流程,完成测量任务。
(3)后续处理:将测量结果进行核对,绘制及提交水准测量报告。
6、误差控制
测量过程中的各项精度和误差均按照规定的水准精度进行检查和确认,异常应及时报告以便采取处理措施,以保证作业质量。
三四等导线测量规范
导线测量规范(Ⅰ)导线测量的主要技术要求各等级导线测量的主要技术要求,应符合表3.3.1的规定。
注:1 表中n为测站数。
2 当测区测图的最大比例尺为1:1000时,一、二、三级导线的导线长度,、平均边长可适当放长,但最大长度不应大于表中规定相应长度的2倍。
3.3.2 当导线平均边长较短时,应控制导线边数不超过表3、3、1相应等级导线长度与平均边长算得的边数;当导线长度小于表3、3、1规定长度的1/3时,导线全长的绝对闭合差不应大于13㎝。
3.3.3 导线网中,结点与结点、结点与高级点之间的导线段长度不应大于表3、3、1中相应等级规定长度的0、7倍。
(Ⅲ)水平角观测3.3.7 水平角观测所使用的全站仪、电子经纬仪与光学经纬仪,应符合下列相关规定:1 照准部旋转轴正确性指标:管水准器气泡或电子水准器长气光在各位置的读数较差,1秒级仪器不应超过2格,2秒级仪器不应超过1格,6秒级仪器不应超过1、5格。
2 光学经纬仪的测微器行差及隙动差指标:1秒级仪器不应大于1秒,2秒级仪器不应大于2秒。
3 水平轴不垂直于垂直轴之差指标;1秒级仪器不应超过10秒,2秒级仪器不应超过15秒,6秒级仪器不应超过20秒。
4 补偿器的补偿要求:在仪器补偿器的补偿区间,对观测成果应能进行有效补偿。
5 垂直微动旋转使用时,视准轴在水平方向上不产生偏移。
6 仪器的基座在照准部施转时的位移指标:1秒级仪器不应超过0、3秒,2秒级仪器不应超过1秒,6秒级仪器不应超过1、5秒。
7 光学(或激光)对中器的视轴(或射线)与竖轴的重合度不应大于1㎜。
3.3.8 水平角观测宜采用方向观测法,并符合下列规定:1 方向观测法的技术要求,不应超过表3.3.8的规定。
表3.3.8水平角方向观测法的技术要求注;1 全站仪、电子经纬仪水平角观测时不受光学测微器两次重合读数之差指标的限制。
2 当观测方向的垂直角超过±30的范围时,该方向2C互差可按相邻测回同方向进行比较,其值应满足表中一测回内2C互差的限值。
工程现场水准测量步骤(四等)
四等水准测量控制测量除了要完成平面控制测量外,还要进行高程控制测量。
小区域地形测图或施工测量中,多采用三、四等水准测量作为高程控制测量的首级控制。
一、三、四等水准测量(leveling)的技术要求1、高程系统:三、四等水准测量起算点的高程一般引自一、二等水准点,若测区附近没有水准点,也可建立独立的水准网,这样起算点的高程应采用假定高程。
2、布设形式:如果是作为测区的首级控制,一般布设成闭合环线;如果进行加密,则多采用附合水准路线或支水准路线。
三、四等水准路线一般沿公路、铁路或管线等坡度较小、便于施测的路线布设。
3、点位的埋设:其点位应选在地基稳固,能长久保存标志和便于观测的地点,水准点的间距一般为1—1.5km,山岭重丘区可根据需要适当加密,一个测区一般至少埋设三个以上的水准点。
4、三、四等及五等水准测量的精度要求和技术要求列于表中。
二、三、四等水准测量的观测方法三、四等水准测量观测应在通视良好、望远镜成像清晰及稳定的情况下进行。
一般采用一对双面尺。
1、三等水准一个测站的观测步骤:(后-前-前-后;黑-黑-红-红)(1)照准后视尺黑面,精平,分别读取上、下、中三丝读数,并记为(1)、(2)、(3)。
(2)照准前视尺黑面,精平,分别读取上、下、中三丝读数,并记为(4)、(5)、(6)。
(3)照准前视尺红面,精平,读取中丝读数,记为(7)(4)照准后视尺红面,精平,读取中丝读数,记为(8)这四步观测,简称为“后一前一前一后(黑一黑一红一红)”,这样的观测步骤可消除或减弱仪器或尺垫下沉误差的影响。
对于四等水准测量,规允许采用“后一后一前一前(黑一红一黑一红)”的观测步骤。
2、一个测站的计算与检核:观测记录参看书本表7-11。
①视距的计算与检核后视距(9)=[(1)—(2)]X100m前视距(10)=[(4)—(5)]Xl00m三等≯75m,四等≯l00m前、后视距差(11)=(9)—(10)三等≯3m,四等≯5m前、后视距差累积(12)=本站(11)+上站(12)三等≯6m,四等≯l0rn②水准尺读数的检核同一根水准尺黑面与红面中丝读数之差:前尺黑面与红面中丝读数之差13)=(6)十K—(7)后尺黑面与红面中丝读数之差(14)=(3)十K—(8)三等≯2mm,四等≯3mm(上式中的K为红面尺的起点数,为4.687m或4.787m)③高差的计算与检核黑面测得的高差(15)=(3)—(6)红面测得的高差(16)=(8)—(7)校核:黑、红面高差之差(17)=(15)—[(16)±0.100]或(17)=(14)—(13)三等≯3mm,四等≯5mm高差的平均值(18)= [(15)+(16)±0.100]/2在测站上,当后尺红面起点为4.687m,前尺红面起点为4.787m时,取十0.100,反之,取—0.100。
四等水准测量要求
四等水准测量要求1.网路设计:四等水准测量需要在测区内先设计或采用已有的测量网路。
测量网路的设计要考虑地形和地貌的特征,避免不必要的测量距离过长或测点密集程度不够。
2.测区划分:根据实际情况,将测区划分成若干工作原点,每个工作原点内测量网路必须封闭。
工作原点之间的串测线一般设置为取点线或转点线。
3.测线设置:四等水准测量中的测线需要尽量考虑自然路线,即避免设立在凹凸不平或道路狭窄的地段上。
测标设置要牢固可靠,保证测量过程的精度和可靠性。
4.水准仪准备:进行四等水准测量需要准备好精度符合要求的水准仪,并进行仪器的校准和调试工作。
校准结果要符合国家测绘规定的精度标准。
5.观测方法:四等水准测量可以采用前视法或后视法进行观测,观测过程中需要保持稳定的仪器姿势,并进行仪器和目标的测量记录。
6.数据处理:观测结束后,需要对观测数据进行精确的处理与计算,包括数据的平差和连续调和,以提高测量结果的精度和可靠性。
7.错误检查与调整:四等水准测量在数据处理过程中需要对误差进行检查与调整,例如检查闭合差、高差异常值等,并进行必要的修正来保证测量结果的准确性。
8.控制点设置:四等水准测量中,为了提高测量精度和可靠性,需要设置一些密控点作为基础控制点。
这些控制点需要通过较高等级的测量来确定其精度,以供四等水准测量进行控制。
9.报告与记录:四等水准测量结果需要进行报告与记录,包括测量数据、处理结果、误差分析等内容,并标明测区的范围和测区内的控制点。
四等水准测量是一项精细严谨的测量工作,需要严格按照国家测绘标准和要求进行,以保证测量结果的准确性和可靠性。
在实际操作中,需要注意遵循安全操作规程,并根据测区内的实际情况合理设置测点,以确保测量工作的顺利进行。
同时,四等水准测量的结果还需要与同类测量工作相互比对和校核,以确保整个测绘工作的准确性和一致性。
四等水准测量顺序
四等水准测量顺序 Document number:NOCG-YUNOO-BUYTT-UU986-1986UT三、四等水准测量控制测量除了要完成平面控制测量外,还要进行高程控制测量。
小区域地形测图或施工测量中,多采用三、四等水准测量作为高程控制测量的首级控制。
一、三、四等水准测量(leveling)的技术要求1、高程系统:三、四等水准测量起算点的高程一般引自国家一、二等水准点,若测区附近没有国家水准点,也可建立独立的水准网,这样起算点的高程应采用假定高程。
2、布设形式:如果是作为测区的首级控制,一般布设成闭合环线;如果进行加密,则多采用附合水准路线或支水准路线。
三、四等水准路线一般沿公路、铁路或管线等坡度较小、便于施测的路线布设。
3、点位的埋设:其点位应选在地基稳固,能长久保存标志和便于观测的地点,水准点的间距一般为1—1.5km,山岭重丘区可根据需要适当加密,一个测区一般至少埋设三个以上的水准点。
4、三、四等及五等水准测量的精度要求和技术要求列于表中。
二、三、四等水准测量的观测方法三、四等水准测量观测应在通视良好、望远镜成像清晰及稳定的情况下进行。
一般采用一对双面尺。
1、三等水准一个测站的观测步骤:(后-前-前-后;黑-黑-红-红)(1)照准后视尺黑面,精平,分别读取上、下、中三丝读数,并记为(1)、(2)、(3)。
(2)照准前视尺黑面,精平,分别读取上、下、中三丝读数,并记为(4)、(5)、(6)。
(3)照准前视尺红面,精平,读取中丝读数,记为(7)(4)照准后视尺红面,精平,读取中丝读数,记为(8)这四步观测,简称为“后一前一前一后(黑一黑一红一红)”,这样的观测步骤可消除或减弱仪器或尺垫下沉误差的影响。
对于四等水准测量,规范允许采用“后一后一前一前(黑一红一黑一红)”的观测步骤。
2、一个测站的计算与检核:观测记录参看书本表7-11。
①视距的计算与检核后视距 (9)=[(1)—(2)]X100m前视距 (10)=[(4)—(5)]Xl00m 三等≯75m,四等≯l00m前、后视距差 (11)=(9)—(10) 三等≯3m,四等≯5m前、后视距差累积 (12)=本站(11)+上站(12) 三等≯6m,四等≯l0rn②水准尺读数的检核同一根水准尺黑面与红面中丝读数之差:前尺黑面与红面中丝读数之差 13)=(6)十K—(7)后尺黑面与红面中丝读数之差 (14)=(3)十K—(8) 三等≯2mm,四等≯3mm(上式中的K为红面尺的起点数,为4.687m或4.787m)③高差的计算与检核黑面测得的高差 (15)=(3)—(6)红面测得的高差(16)=(8)—(7)校核:黑、红面高差之差 (17)=(15)—[(16)±0.100]或 (17)=(14)—(13) 三等≯3mm,四等≯5mm高差的平均值(18)= [(15)+(16)±0.100]/2在测站上,当后尺红面起点为4.687m,前尺红面起点为4.787m时,取十0.100,反之,取—0.100。
四等水准测量步骤
三、四等水准测量(2008-10-10 23:27:42)标签:教育三、四等水准测量控制测量除了要完成平面控制测量外,还要进行高程控制测量。
小区域地形测图或施工测量中,多采用三、四等水准测量作为高程控制测量的首级控制。
一、三、四等水准测量(level in g)的技术要求1、高程系统:三、四等水准测量起算点的高程一般引自国家一、二等水准点,若测区附近没有国家水准点,也可建立独立的水准网,这样起算点的高程应采用假定高程。
2、布设形式:如果是作为测区的首级控制,一般布设成闭合环线;如果进行加密,则多采用附合水准路线或支水准路线。
三、四等水准路线一般沿公路、铁路或管线等坡度较小、便于施测的路线布设。
3、点位的埋设:其点位应选在地基稳固,能长久保存标志和便于观测的地点,水准点的间距一般为1 —1. 5km,山岭重丘区可根据需要适当加密,一个测区一般至少埋设三个以上的水准点。
4、三、四等及五等水准测量的精度要求和技术要求列于表中。
二、三、四等水准测量的观测方法三、四等水准测量观测应在通视良好、望远镜成像清晰及稳定的情况下进行。
一般采用一对双面尺。
1、三等水准一个测站的观测步骤:(后-前-前-后;黑-黑-红-红)(1)照准后视尺黑面,精平,分别读取上、下、中三丝读数,并记为(1)、(2)、(3)。
(2)照准前视尺黑面,精平,分别读取上、下、中三丝读数,并记为(4)、(5 )、(6)。
(3)照准前视尺红面,精平,读取中丝读数,记为(7)(4)照准后视尺红面,精平,读取中丝读数,记为(8)这四步观测,简称为“后一前一前一后(黑一黑一红一红)”,这样的观测步骤可消除或减弱仪器或尺垫下沉误差的影响。
对于四等水准测量,规范允许采用“后一后一前一前(黑一红一黑一红)”的观测步骤。
2、一个测站的计算与检核:观测记录参看书本表7-11 。
①视距的计算与检核后视距(9)=[(1) —(2)]X100m前视距(10)=[(4) —(5)]XI00m 三等》75m,四等》100m前、后视距差(11)=(9) —(10) 三等》3m,四等》5m前、后视距差累积(12)=本站(11)+上站(12) 三等》6m,四等》I0rn②水准尺读数的检核同一根水准尺黑面与红面中丝读数之差:前尺黑面与红面中丝读数之差13)=(6) 十K—(7)后尺黑面与红面中丝读数之差(14)=(3) 十K—(8) 三等》2mm四等》3mm(上式中的K为红面尺的起点数,为4. 687m或4 . 787m)③高差的计算与检核黑面测得的高差(15)=(3) —(6)红面测得的高差(16)=(8) —(7)校核:黑、红面高差之差(17)=(15) —[(16) ±0. 100]或(17)=(14) —(13) 三等》3mm 四等》5mm高差的平均值(18)= [ (15)+(16) ±0. 100]/2在测站上,当后尺红面起点为4. 687m,前尺红面起点为4 . 787m时,取十0. 100 ,反之,取—0. 100。
三、四等水准测量步骤
三、四等水准测量控制测量除了要完成平面控制测量外,还要进行高程控制测量。
小区域地形测图或施工测量中,多采用三、四等水准测量作为高程控制测量的首级控制。
一、三、四等水准测量(leveling)的技术要求1、高程系统:三、四等水准测量起算点的高程一般引自国家一、二等水准点,若测区附近没有国家水准点,也可建立独立的水准网,这样起算点的高程应采用假定高程。
2、布设形式:如果是作为测区的首级控制,一般布设成闭合环线;如果进行加密,则多采用附合水准路线或支水准路线。
三、四等水准路线一般沿公路、铁路或管线等坡度较小、便于施测的路线布设。
3、点位的埋设:其点位应选在地基稳固,能长久保存标志和便于观测的地点,水准点的间距一般为1—1.5km,山岭重丘区可根据需要适当加密,一个测区一般至少埋设三个以上的水准点。
4、三、四等及五等水准测量的精度要求和技术要求列于表中。
二、三、四等水准测量的观测方法三、四等水准测量观测应在通视良好、望远镜成像清晰及稳定的情况下进行。
一般采用一对双面尺。
1、三等水准一个测站的观测步骤:(后-前-前-后;黑-黑-红-红)(1)照准后视尺黑面,精平,分别读取上、下、中三丝读数,并记为(1)、(2)、(3)。
(2)照准前视尺黑面,精平,分别读取上、下、中三丝读数,并记为(4)、(5)、(6)。
(3)照准前视尺红面,精平,读取中丝读数,记为(7)(4)照准后视尺红面,精平,读取中丝读数,记为(8)这四步观测,简称为“后一前一前一后(黑一黑一红一红)”,这样的观测步骤可消除或减弱仪器或尺垫下沉误差的影响。
对于四等水准测量,规范允许采用“后一后一前一前(黑一红一黑一红)”的观测步骤。
2、一个测站的计算与检核:观测记录参看书本表7-11。
①视距的计算与检核后视距(9)=[(1)—(2)]X100m前视距(10)=[(4)—(5)]Xl00m 三等≯75m,四等≯l00m前、后视距差(11)=(9)—(10) 三等≯3m,四等≯5m前、后视距差累积(12)=本站(11)+上站(12) 三等≯6m,四等≯l0rn②水准尺读数的检核同一根水准尺黑面与红面中丝读数之差:前尺黑面与红面中丝读数之差13)=(6)十K—(7)后尺黑面与红面中丝读数之差(14)=(3)十K—(8) 三等≯2mm,四等≯3mm(上式中的K为红面尺的起点数,为4.687m或4.787m)③高差的计算与检核黑面测得的高差(15)=(3)—(6)红面测得的高差(16)=(8)—(7)校核:黑、红面高差之差(17)=(15)—[(16)±0.100]或(17)=(14)—(13) 三等≯3mm,四等≯5mm高差的平均值(18)= [(15)+(16)±0.100]/2在测站上,当后尺红面起点为4.687m,前尺红面起点为4.787m时,取十0.100,反之,取—0.100。
四等导线测量规范
四等导线测量规范 Prepared on 24 November 2020导线测量规范(Ⅰ)导线测量的主要技术要求各等级导线测量的主要技术要求,应符合表3.3.1的规定。
注:1 表中n为测站数。
2 当测区测图的最大比例尺为1:1000时,一、二、三级导线的导线长度,、平均边长可适当放长,但最大长度不应大于表中规定相应长度的2倍。
3.3.2 3㎝。
3.3.3(Ⅲ)水平角观测3.3.7 水平角观测所使用的全站仪、电子经纬仪和光学经纬仪,应符合下列相关规定:1 照准部旋转轴正确性指标:管水准器气泡或电子水准器长气光在各位置的读数较差,1秒级仪器不应超过2格,2秒级仪器不应超过1格,6秒级仪器不应超过格。
2 光学经纬仪的测微器行差及隙动差指标:1秒级仪器不应大于1秒,2秒级仪器不应大于2秒。
3 水平轴不垂直于垂直轴之差指标;1秒级仪器不应超过10秒,2秒级仪器不应超过15秒,6秒级仪器不应超过20秒。
4 补偿器的补偿要求:在仪器补偿器的补偿区间,对观测成果应能进行有效补偿。
5 垂直微动旋转使用时,视准轴在水平方向上不产生偏移。
6 仪器的基座在照准部施转时的位移指标:1秒级仪器不应超过秒,2秒级仪器不应超过1秒,6秒级仪器不应超过秒。
7 光学(或激光)对中器的视轴(或射线)与竖轴的重合度不应大于1㎜。
3.3.8 水平角观测宜采用方向观测法,并符合下列规定:1 方向观测法的技术要求,不应超过表3.3.8的规定。
表3.3.8水平角方向观测法的技术要求注;1 全站仪、电子经纬仪水平角观测时不受光学测微器两次重合读数之差指标的限制。
2 当观测方向的垂直角超过±30的范围时,该方向2C互差可按相邻测回同方向进行比较,其值应满足表中一测回内2C互差的限值。
2 当观测方向不多于3个时,可不归零。
3 当观测方向多于6个时,可进行分组观测。
分组观测应包括两个共同方向(其中一个为共同零方向)。
其两组观测角之差,不应大于同等级测角中误差的2倍。
控制测量规范及要求
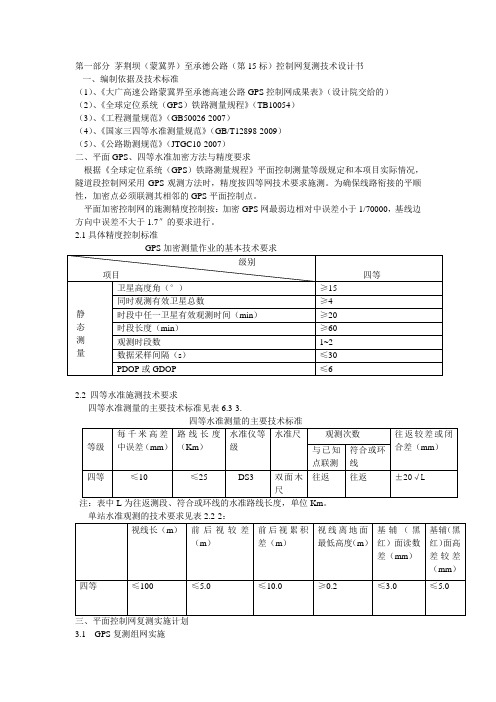
第一部分茅荆坝(蒙冀界)至承德公路(第15标)控制网复测技术设计书一、编制依据及技术标准(1)、《大广高速公路蒙冀界至承德高速公路GPS控制网成果表》(设计院交给的)(2)、《全球定位系统(GPS)铁路测量规程》(TB10054)(3)、《工程测量规范》(GB50026-2007)(4)、《国家三四等水准测量规范》(GB/T12898-2009)(5)、《公路勘测规范》(JTGC10-2007)二、平面GPS、四等水准加密方法与精度要求根据《全球定位系统(GPS)铁路测量规程》平面控制测量等级规定和本项目实际情况,隧道段控制网采用GPS观测方法时,精度按四等网技术要求施测。
为确保线路衔接的平顺性,加密点必须联测其相邻的GPS平面控制点。
平面加密控制网的施测精度控制按:加密GPS网最弱边相对中误差小于1/70000,基线边方向中误差不大于1.7″的要求进行。
2.1具体精度控制标准2.2 四等水准施测技术要求四等水准测量的主要技术标准见表6.3-3.注:表中L为往返测段、符合或环线的水准路线长度,单位Km。
三、平面控制网复测实施计划3.1 GPS复测组网实施为保证线路上所有控制点成果具有较高的可靠性和尽量保证点位精度的均匀性,平面控制网复测采用4太GPS接收机同时作业的观测模式,以此提高GPS观测网形的图形强度。
GPS 网各时段全部以边连接方式构网,形成由大地四边形组成的带状网。
3.2 采用GPS测量方法的平面复测遵循与设计单位建网时相同的构网原则,本次GPS方法的控制网复测组网以大地四边形为基本构网图形组成带状网,采用边联式构网。
实际外业测量必须遵循基线组网设计所确定的作业模式,并在接收机或控制器上配置GPS外业观测参数,参与作业的接收机所配制的参数应相同。
每天出工之前,必须检查电池容量是否满足作业要求,数据存储设备应有足够的存储空间,仪器及其附件必须齐全。
天线安置应符合下列要求:—在开始GPS外业观测前,必须确认天线安置基座的对中器合格,天线安置基座的对中精度要求为1mm。
四等水准测量程序及技术要求
四等水准测量程序及技术要求
四等水准测量是一种常见的地理测量方法,用于确定地面高程。
下面是四等水准测量的一般程序和技术要求:
1. 准备工作:确定观测线路,并进行勘测、测量设备的校准和检查,确保测量器材正常工作。
2. 设置控制点:根据测量需要,在测线两端或途中选择一些控制点,确定其坐标和高程。
3. 建立基准点:选择一处基准点,确定其精确的高程数值,并建立起基准点到观测点之间的连接。
4. 观测点设置:沿着测量线路,在控制点之间设置一系列观测点,并测量其高程。
5. 高程观测:使用合适的水准仪测量各观测点的高程,记录测量数据。
6. 数据处理:根据测量数据,进行数据处理和计算,得出每个观测点的高程。
7. 检查和校验:对数据进行检查和校验,确保数据的准确性和可靠性。
8. 绘制高程图:根据观测点的高程数据,绘制高程图,反映地形地貌的变化。
技术要求:
1. 测量仪器:使用精度高、稳定性好的水准仪进行测量。
2. 观测点设置:观测点应设置在地面平稳、无障碍的地方,避免地质变化大的区域。
3. 观测精度:观测精度应满足测量精度要求,通常要求误差小于正负一厘米。
4. 数据处理:应使用专业的测量数据处理软件进行数据处理,确保结果的精度和可靠性。
5. 质量控制:每个测量步骤都应进行质量控制,记录数据、观测条件和操作步骤,以备查询和审查。
总之,在进行四等水准测量时,需要严格按照测量程序和技术要求进行操作,以确保测量结果的准确性和可靠性。
同时,应注意安全措施,遵守相关规定,确保测量人员的安全。
四等控制测量
测站计算和检核
1)双面尺法计算和检核 ①视距计算 前、后视距差:三等水准测量,不得超 过3m,四等水准测量,不得超过5m。 前、后视距累积差:三等水准测量,不得超 过6m,四等水准测量,不得超过10m。
②同一水准尺红、黑面中丝读数的检核
同一水准尺红、黑面中丝读数之差,应等 于该尺红、黑面的常数差K(4.687或4.787), 三等水准测量,不得超过2mm,四等水准测 量,不得超过3mm。
(9)
(10)
(11)
1.681
1.307
1
37.4
-0.2
(12)
0.84 0.4973
37.6 -0.2
1.494 0.661 0.83
1.37 0.54 0.383
2
11
平均高差 备注
(15)
+0.832(5)
①后视黑面,读取下、
上、中丝读数,记入
黑
红
(1)(2)(3)中; 面
面
尺
尺
②前视黑面,读取下、
上、中丝读数,记入
(4)(5)(6)中;
③前视红面,读取中丝读数,记入(7); ④后视红面,读取中丝读数,记入(8)。
2)单面尺法
按变动仪器高法进行检核。观测顺序为 “后—前—变动仪器高—前—后”,变高前按 三丝读数,以后按中丝读数。
1.0
75
2.0
100 5
10 0.2
3.0
100 大致相等
基本分划、辅 助分划(黑红 面)高差之差 mm
1.5
3.0
5.0
≤100
L为往返测段、附合或环绕的水准路线长度(单位为km),n为测站数。
等
水准仪 水准尺
RTK测量技术要求
RTK测量技术要求
RTK测量范围
RTK测量可用于的测量工作包括:四等以下平面控制测量、高程控制测量、工程测量、地形测量、放样测量。
RTK控制测量技术要求
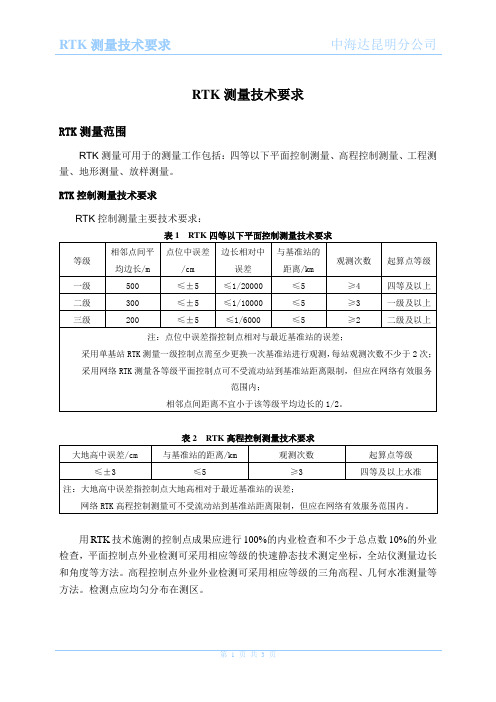
RTK控制测量主要技术要求:
用RTK技术施测的控制点成果应进行100%的内业检查和不少于总点数10%的外业检查,平面控制点外业检测可采用相应等级的快速静态技术测定坐标,全站仪测量边长和角度等方法。
高程控制点外业外业检测可采用相应等级的三角高程、几何水准测量等方法。
检测点应均匀分布在测区。
RTK地形测量
RTK控制测量主要技术要求:。
GPS控制网等级分类
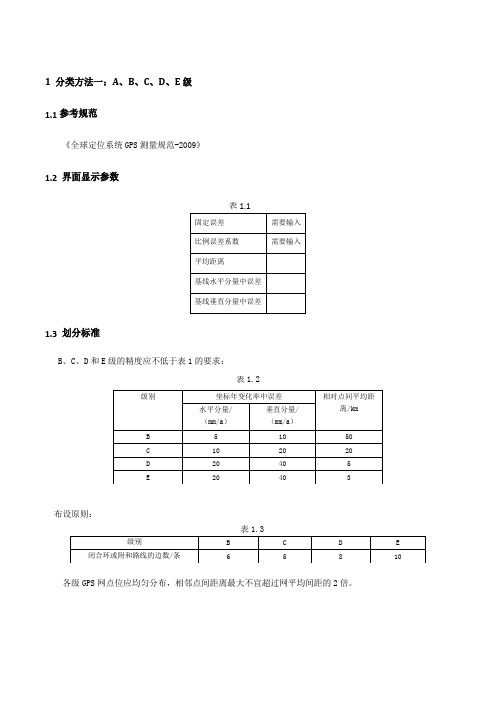
1分类方法一:A、B、C、D、E级1.1参考规范《全球定位系统GPS测量规范-2009》1.2界面显示参数表1.11.3划分标准B、C、D和E级的精度应不低于表1的要求:表1.2布设原则:表1.3各级GPS网点位应均匀分布,相邻点间距离最大不宜超过网平均间距的2倍。
表 1.4 表 1.5w x ≦5 σw y ≦ 5 σ接收机的选用:观测:数据处理(1)外业数据检核1)B 级 GPS 网基线外业预处理和 C 、D 、E 级 GPS 网基线处理,复测基线的长度较差 ds 应满足公式 1.1 的规定:ds≦2 2σ (1.1) σ---为基线测量中误差,单位为毫米2)B 、C 、D 、E 级 GPS 网基线测量中误差 σ 采用外业测量时使用的 GPS 接收机的标称精度,计算时变长按实际平均边长计算。
3)B 、C 、D 、E 级 GPS 网同步环闭合差,不宜超过以下规定:三边同步环中只有两个同步边成果可以视为独立的成果,第三边成果应为其余两边的代数和。
由于模型误差和处理软件的内在缺陷,第三边处理结果与前两边的代数和常不为零,其差值应符合公式 1.23 3表 2.1 w z≦ 5 σ23(1.2)式中:σ----基线测量中误差,单位为毫米,计算按 12.2.5 规定执行。
对于四站以上同步观测时段,在处理完个边观测值后,应检查一切可能的三边环闭合差。
4) B 、C 、D 、E 级 GPS 网外业基线的处理结果,其独立闭合环或附和路线坐标闭合差 W S 和各坐标分量 闭合差应满足公式(1.3)的规定。
w x ≦3 n σ w y ≦3 n σ w z ≦3 n σW S = w 2+ w y + w 2n 为闭合环数。
w s ≦3 n σ (1.3)(2)基线向量解算基本要求(略参考规范 12.3.3 节)2 分类方法二:城市二、三、四等和一、二级城市或工程 GPS 按相邻点的平均距离和精度划分为二、三、四等和一、二级。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
四等控制网测量技术要求(1″级仪器)
1.水平角方向观测法的技术要求
半测回归零差:6″
一测回内2C互差:9″
同一方向值各测回互差:6″
2.边长测量的技术要求
一测回读数较差限值:2mm
测回间较差限值:3mm
往返观测平距较差限值:2m D (2m m<m D≤5mm)3.导线测量的主要技术要求
测角中误差:2.5″
测距相对中误差:1/80000
方位角闭合差:5√n″
导线全长相对闭合差:1/40000
测回数:4
注:1 n为测站数
2 当边长短于500m时,四等边长中误差应小于5mm
半测回归零差:是指盘左或盘右半测回中两次瞄准起始目标的读数差,用△表示,求出后计入表格最后一行内。
若归零差超限,应及时重测。
2C值=盘左-(盘右±180)是一个测回内盘左与盘右的差值。
2C的最大值与最小值之差称为“2C互差”。
中误差:观测值与真值偏差的平方和观测次数n比值的平方根。
测距相对中误差:测距中误差和测段距离的比值。