电铲原理图
太重10m3电铲CAD图纸

N2
W1 2ZL 8
12 7ZL
20
1 W2
137 133
138 1RY1
1ZF 23
CF1
76
23 CF2
+X1 来自位移 稳压电源
8ZL 8
76
22
1ZF
1W1
122
CF1 121 111
112
1R1
CF2 221 115 1W2
116
1R3
1L1 1KG1 1ZL1
1KG2 1ZL2
1RY3
1FQ1
电流互感器 电压互感器 电度表
3φ 50HZ 6KV
至主、付变压器 Y1 Y2 Y3
GSD
X1 X2 X11 X12
X3 手动隔离开关 X13
LH3 H501 LH4 H501
H503
H502
Y3 Y2
GB5 H511
H512
H502 H501 KWh
Y1 GRD4 GRD5
GRD6
H513 H503
日期 张
WK-10电铲电气原理图5
TZ
C-Z
采矿场铲钻大修工段 图样 标记 标准 数量 日期: 2001/6/12
过流保护继电器及开关 可控硅调压器 推压发电机他励绕组
RJ4 65 RJ7
RJ5 66 JC5
JC6 69
XLJ
HK
45° 0° 45° H T Z 75 RJ8 76
RJ9 77
RJ10 78
XYJ 70
JC5
RJ11 79 RJ12 80
81
54
ZK4 81A
54 JC7
82 1GLJ 83 2GLJ 84 3GLJ 85
大型矿用挖掘机_电铲概述
Abst r act: The general description about the electrical excavator for mining application is presented in the article. Key wor ds: electrical excavator; construction; structural feature; technical characteristics; operation
各电机为电铲专用型, 用可控硅变流装置供 - 6-
电 ; 有 先 进 的 电 控 系 统 和 多 级 RPC 功 率 补 偿 装 置, 可保证最佳的功率因数。行走电机与推压电 机实现了互换, 电机对中螺栓采用一体化设计。 电铲有完善的自动润滑系统、自动灭火系统和独 立的气动系统, 另外还有很好的通风、采暖、防 尘、净化、除霜等装置, 提供了良好的操作条 件, 可保证电铲最佳的工作性能和最低的挖掘成 本。
设备名称 4100XPB 55.8~73
1.6 10 14 580 3.61×105 20.17 10.67 18.06 23.8 30 6 000 3 000 2×1 860 可控硅变流
设计使装配更加方便, 可更换的上部铸造导轨、 大型高锰钢铸造前导轮、整体转动淬硬的支重轮 保证了其长期寿命要求; 履带板采用箱型铸造结 构, 适应各种行走路面; 回转使用多电机驱动, 缩短了起、制动时间。4100XPB 电铲具有三套回 转机构, 扭矩增加 31%, 负载减少 12%, 与其它 4100 系列电铲具有互换性, 减少了备件库存量, 模块化设计的组件减少了维修时间; 优化的平台 布置使电铲有极好的维护空间、大型的机房, 超 宽结构减少了尾部回转半径; 锻造的中心轴柱, 可在上部平台调整, 有可靠的过盈, 底端的螺帽 使安装更加方便; 提升装置采用双电机驱动, 改 善了受力条件; 推压采用高锰钢宽型齿条, 挖掘 切削力大, 稳定性好, 适用各种采矿条件, 采用 特种背连三角皮带减震和缓冲, 有 PLC 控制的自 动张紧装置, 使其具有最佳的张紧, 从而增加了 皮带、轴承和传动轴的寿命; 斗杆运用有限元进 行可靠性设计; 铲斗采用了可调式小拉杆、液压 缓冲器装置, 铲斗优化的几何尺寸增加了电铲的 装满系数。
液压维修第14章--铲运机液压故障的诊断与排除
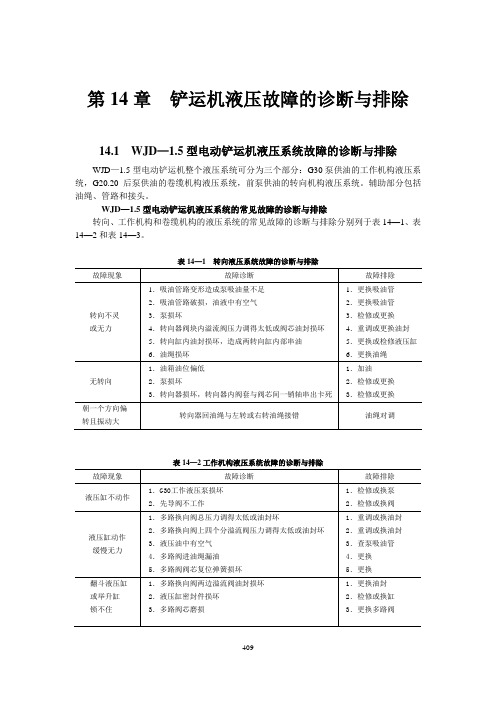
第14章铲运机液压故障的诊断与排除14.1 WJD—1.5型电动铲运机液压系统故障的诊断与排除WJD—1.5型电动铲运机整个液压系统可分为三个部分:G30泵供油的工作机构液压系统,G20.20后泵供油的卷缆机构液压系统,前泵供油的转向机构液压系统。
辅助部分包括油绳、管路和接头。
WJD—1.5型电动铲运机液压系统的常见故障的诊断与排除转向、工作机构和卷缆机构的液压系统的常见故障的诊断与排除分别列于表14—1、表14—2和表14—3。
表14—1 转向液压系统故障的诊断与排除表14—2工作机构液压系统故障的诊断与排除表14—3卷绕机构液压系统故障的诊断与排除14.1.2 WJD—1.5型电动铲运机液压系统故障部位的查找方法从前面的表中可以看出,一个故障产生的原因有多种,假设一个原因一个原因去查找,既费时又费力。
便捷的查找方法是:大的故障从整个液压系统查起,小的故障从局部查起;查找思路先易后难,先查结构较简单的零部件,后查较复杂的零部件;查找顺序为辅助部分。
例如转向系统转向不灵或无力这一故障,从表14—1中可以看出,产生这一故障的原因多达6种。
可依照上述的查找方法来找出故障的产生原因与部位。
首先,判定该故障是否为大的故障,假设整个液压系统工作均不正常,则说明是大故障,假设仅是转向不灵或无力,其余液压分系统均正常则说明是小故障或局部故障。
查找思路是先易后难,顺序为观察辅助部分的油绳与接头是否渗漏油液,再查转向器溢流阀是否调得太低,假设调到位转向仍然无力或不灵,可将溢流阀拆下检查,看是否是溢流阀阀芯上的O形油封损坏;假设正常,再用压力表测量泵出口压力是否正常,压力正常则说明泵是好的,可判定是液压缸油封损坏,反之则是泵损坏。
液压系统故障原因和部位查出后,按照各部件检修要求检修。
实例:故障名称:电动机无法起动,电工检查电控完好。
故障现象是当电动机Y起动时,翻斗缸自动收斗,Y—△转换时电动机停转。
当时将卷缆阀上两溢流阀调松到位后电动机起动成功一次后又不行。
电铲电气维修与安全
2、交流辅助系统 此系统有独立的电气控制柜如下图
风机、空压 机、加热器 开关
总断路器
各交流系统断路器
各交流控系统接触器
各交流控制系统热继电器
交流辅助系统主要由:机棚通风机、机棚加 热器、各电动机通风机,电气室通风机,空压机、 照明电源、润滑室电源各系统组成。 此处经常出现的故障有:电动机风机电源过热 故障、分断路器跳闸、热继电器动作、接触器不 能正常吸合等 在处理类似故障时,要弄清楚每个分系统的 断路器,准确的切断电源,因为分系统多容易误 断电,断电后还要用万用表测量维修点有无电。 确认无电后方可动手 如果热继电器动作,不仅仅是复位还要尽可 能的找出动作的原因。
4、PLC系统 a、控制原理 PLC 控制系统采用PROFIBUS DP 现场总线 通讯网络控制,AFE 整流回馈单元、各机构逆 变器、远端控制器(ET200)分别挂接在 PROFIBUS DP 总线上,构成分布式控制网络。 CPU 通过PROFIBUS DP 现场总线通讯网络获 取司机室操作命令、各机构逆变器及AFE 整流 回馈单元的运行状态和故障信息;通过开关量及 计数输入模块获取,配电与辅助回路运行状态与 故障信息、安全保护与行程限位信息等;经逻辑 与数据运算后,通过相同的路径对整个电气系统 进行控制。
电铲电气维修与安全
一、电铲概况 二、维修与安全 WK-35电气运行原பைடு நூலகம் 高压系统、交流辅助系统、交流变频系统、 PLC系统 、低压环
一、WK-35电铲概况 斗容49.2m³ 机棚宽度9.4m 尾部回转半径9.91m 天轮高度18.6m 行走速度1.08km/h 整机工作重量1030T 提升电动机2台、700kw、风机2台、5.5kw 回转电动机2台、400kw、风机2台、4.5kw 推压电动机1台、400kw、风机1台、4.5kw 行走电动机2台、450kw、风机1台、4.5kw
电铲司机讲义

电铲司机培训讲义第一章国内电铲的分类及技术特征挖掘机,俗名电铲。
是露天开采用的主要设备之一。
主要用于挖掘经过爆破后的岩石和矿产物,以及剥离各种土和沙粒,并将他们直接装载到大容量的运输工具中去。
其次:还可用于建筑物地基、铁路、公路、路基的挖方、填方工作,水利和国防工程的有关作业中。
再次:装上起重设备可用做安装设备和装卸物的工作。
一、电铲分类。
1、按驱动装置不同可分为电动机驱动和柴油机驱动。
电动机驱动的优点是使用成本较低,缺点是移动不方便;柴油机驱动的优点是移动方便,缺点是使用成本较高。
从经济方面考虑,应用较广的是电动机驱动。
2、按传动方式可分为机械挖掘机和液压挖掘机;机械挖掘机主要为机械传动,如齿轮传动,轴传动、链条传动。
液压挖掘机主要靠液压传动,如液压缸、液压马达、液压泵传动。
机械挖掘机的优点是:重量大(4立方有250吨左右),比较稳定,惯性好,力量大,体积大。
缺点是笨重,不灵活,维修费用高。
液压挖掘机的优点是重量轻,灵活、操作方便、维修方便。
缺点是力量小,铲装能力比不上机械挖掘机。
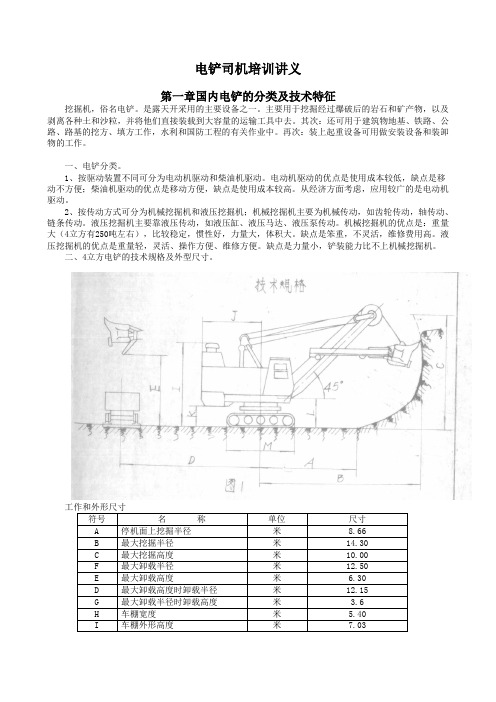
二、4立方电铲的技术规格及外型尺寸。
注第二章电铲的结构特点、工作原理本单位有4台机械挖掘机,12台液压挖掘机,下面,我就以4立方电铲为例介绍电铲的工作原理。
4立方电铲主要由正铲工作装置、回转平台及上部结构、底盘及行走机构,电气设备4大部份组成。
一、正铲工作装置主要由1、动臂2、斗杆3、铲斗4、推拉机构5、开斗机构五部份组成。
1、铲斗。
铲斗由斗体(斗前壁和斗后壁)、斗齿、提梁、滑轮和斗底等组成。
斗体的斗前壁用高锰钢铸造,斗后壁用普通碳素钢铸造,两者用焊接塞联结,斗前壁前装有5个斗齿。
提梁由高锰钢铸造。
斗底是由低锰钢铸造的底板和两根高锰钢铸造的斗底横梁及斗栓杆组成。
2、开斗机构,开斗机构的拉杆与夹板固定在轴上,轴位于斗杆横梁下端的耳子内,链条与夹板相联结,拉杆借助钢丝绳与卷筒相联结,卷筒由电动机带动。
电动机使钢丝绳保持拉紧状态,要开斗时,加大电流,电动机转动卷筒,由钢丝绳将斗栓杆自斗前壁的孔内抽出,打开斗底。
电铲电控系统
图(3).回转电动机转矩控 制方式下的控制特性曲线
行走驱动控制特性 两台400KW行走电动 机分别由提升1#逆变器 和提升2#逆变器驱动, 线路设有切换接触器, 逆变器控制将采用两套 数据组切换方式,实现 对提升1#/右行走和提升 2#/左行走电动机的分别 控制。电动机控制曲线 如图(4)所示
图(4).红线为直流电动机控制特性 曲线, 黑线为变频电动机控制特性曲线。
提升、推压机构装有行程检测编码器,通过SM338通讯模块,CPU 将获取提升、推压的行程信号,从而实现对提升 — 推压行程检测与 限位保护等功能。 PLC数字量 I/O模块将实现对部分继电逻辑、油气路系统的逻辑控 制等。
上位机+PLC现场总线+AFE变频传动
司机室
人机 界面 MPI
提升
PLC
PS CPU DP
变频调速及自动化系统
AFE整流回馈单元
6KV
高压受电器
AFE
公共直流母线DC930V 逆变器 提升1/ 推压 回转 提升2/
高压负荷开关 隔离 开关
主
AFE 从
主接
触器 主变压器
行走1
M 3~ M
行走2
M 3~ M
6KV/2×0.66KV
M 3~
M 3~
M 3~
3~
3~
AFE进线图
提升驱动控制特性 V 两台560KW提升电动机由 两台800KW逆变器驱动,由 200% 于两台提升电机间存在机械 耦合,所以两台逆变器之间 采用转矩主从控制方式,其 100 中主装置(MASTER)为速 % 度控制,从装置(SLAVE) 100% 75% 为转矩控制,这样提升机构 既实现速度控制,又保证两 100% 台电机间的出力均衡。电动 机控制特性曲线如图(1) 所示,从交直流控制特性曲 200% 线的包络面积可知,变频调 速较直流调速具有更高的作 提升电动机控制特性曲线 业效率。
电铲

能减少废石的混入和矿石的损失。
3、遇到根底时如何处理遇到根底时,不要强行挖掘,可采用选点法、掏槽法进行挖掘,开始选好挖一点的,然后沿其周围扩挖,铲斗要稳住,不要跳动,铲体要开近些,提升推压配合要协调,使牙尖产生向上又向前的合力。
当根底的两侧挖开,阻力大大减小后,再正面挖,一般的根底就可以挖开。
对挖不开的死根底扫出,进行爆破处理后再挖掘。
4、装车时的注意事项装车, 时斗齿间不准有浮石,动作要稳、准,铲斗不准碰撞汽车,铲斗不得从汽车驾驶室上方转过,装第一斗时尽量铲较碎的矿岩,离车厢底低一点,不得高于0.5米。
严禁矿岩混装。
5、运转和作业选择正确的采掘设计,保证最好的使用挖掘机,配备足够数量的运输工具,免误其能。
操作中不准扒、砸、压运输车辆。
挖掘不需爆破的矿岩时,必须注意好安全,以免大块砸铲和伤人事故。
作业面为硬矿岩时,必须扫出打孔爆破,挖掘根底大块时,不应堵转时间过长,不得连续堵转。
挖掘机作业时,地面必须保持平坦,禁止三角着地,迴转时要制动平稳,非紧急情况下,不得突然制动迴转,铲斗未离开工作面前不得迴转,如铲斗机构不灵活或斗里卡住大块时,不得用摇摆斗杆和撞击天轮等不正当方法卸料。
作业时避免碰撞斗杆前后保险牙,也不准铲斗撞履带板和动臂。
挖掘机的作业位置与工作面的边缘必须保证一定的安全距离,防止挖掘机偏帮滑下。
挖掘机迴转时,配重箱顶点与运输车辆, 或工作面的安全距离,不应小于500毫米。
不应将装满矿岩的铲斗悬在车道上方待车。
6、挖掘机的行走与扭铲挖掘机行走时,车下必须有专人负责看管电缆,注意行走运转情况,人员不准站在履带板前方。
长距离走铲必须保持道路平坦,并有专人在铲下监护、指挥,在坡道上行走时,必须提前试一下行走制动器是否灵活可靠,上坡时主动轮在后,下坡时主动轮在前,铲斗应在下坡方向放在接近地面的位置,并应做好掩车准备。
扭铲时,地板要平,如地形不太好,可向前或向后开一段,找好有利地形。
原地扭铲,角度大易打齿断轴,退出一定距离后扭铲角度小,以便选择地形会好一些,扭铲时严禁由下坡向上坡方向扭铲,一次扭铲量,不准超过30度角。
露天矿生产工艺采装
现代化露天矿山的采装工作,是指用采掘设备将矿岩从整体母岩或松散爆堆中采集出来,并装入运输容器或直接卸到一定地点的工作。
采装工作是露天矿开采全部生产过程的中心环节。
采装工艺及其生产能力在很大程度上决定着露天矿开采方式、技术面貌、矿床的开采强度和最终的经济效果。
采装工作的主要设备是各种挖掘机和土方工程机械。
挖掘机分单斗和多斗两大类,目前国内外的金属露天矿最广泛应用的是单斗挖掘机,并以电铲为主。
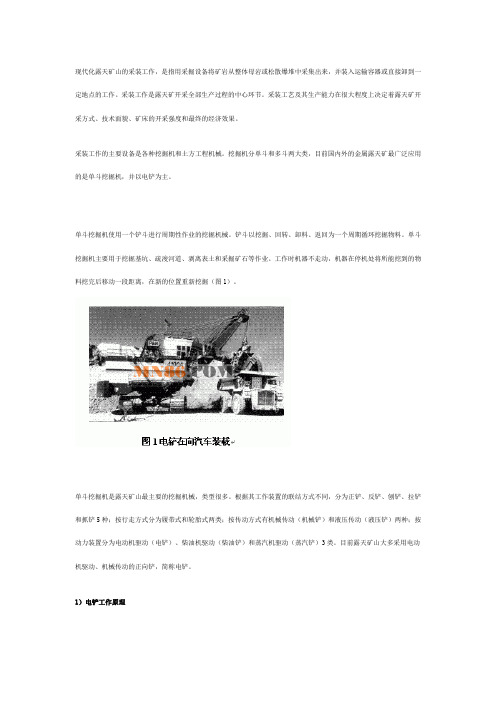
单斗挖掘机使用一个铲斗进行周期性作业的挖掘机械。
铲斗以挖掘、回转、卸料、返回为一个周期循环挖掘物料。
单斗挖掘机主要用于挖掘基坑、疏浚河道、剥离表土和采掘矿石等作业。
工作时机器不走动,机器在停机处将所能挖到的物料挖完后移动一段距离,在新的位置重新挖掘(图1)。
单斗挖掘机是露天矿山最主要的挖掘机械,类型很多。
根据其工作装置的联结方式不同,分为正铲、反铲、刨铲、拉铲和抓铲5种;按行走方式分为履带式和轮胎式两类;按传动方式有机械传动(机械铲)和液压传动(液压铲)两种;按动力装置分为电动机驱动(电铲)、柴油机驱动(柴油铲)和蒸汽机驱动(蒸汽铲)3类。
目前露天矿山大多采用电动机驱动、机械传动的正向铲,简称电铲。
1)电铲工作原理电铲主要组成部分包括工作装置、回转装置、行走装置、动力设备及机房等。
其中工作装置包括铲斗、斗柄、开斗底装置、悬臂、悬挂悬臂的钢丝绳、双脚架及提升钢丝绳等。
铲斗和斗柄刚性联结,当斗柄由推压机构的作用把铲斗伸出的同时,提升钢丝绳在提升机构作用下把铲斗提起,通过伸出铲斗和提升铲斗的密切配合,即可把矿岩装入铲斗内。
由于悬臂是固定在挖掘机回转平台上的,而回转平台又是活套在挖掘机底座的中心轴上。
在回转装置作用下,悬臂、斗柄和铲斗随着回转平台旋转到任何一个需要卸载的方位,使铲斗对准运输容器或卸载点,启动开斗底装置将斗门打开进行卸载。
电铲一般用履带行走。
2)电铲主要工作参数电铲主要工作参数包括挖掘半径、挖掘高度、卸载半径、卸载高度和下挖深度(图2)。
电铲司机讲义.
电铲司机培训讲义第一章国内电铲的分类及技术特征挖掘机,俗名电铲。
是露天开采用的主要设备之一。
主要用于挖掘经过爆破后的岩石和矿产物,以及剥离各种土和沙粒,并将他们直接装载到大容量的运输工具中去。
其次:还可用于建筑物地基、铁路、公路、路基的挖方、填方工作,水利和国防工程的有关作业中。
再次:装上起重设备可用做安装设备和装卸物的工作。
一、电铲分类。
1、按驱动装置不同可分为电动机驱动和柴油机驱动。
电动机驱动的优点是使用成本较低,缺点是移动不方便;柴油机驱动的优点是移动方便,缺点是使用成本较高。
从经济方面考虑,应用较广的是电动机驱动。
2、按传动方式可分为机械挖掘机和液压挖掘机;机械挖掘机主要为机械传动,如齿轮传动,轴传动、链条传动。
液压挖掘机主要靠液压传动,如液压缸、液压马达、液压泵传动。
机械挖掘机的优点是:重量大(4立方有250吨左右),比较稳定,惯性好,力量大,体积大。
缺点是笨重,不灵活,维修费用高。
液压挖掘机的优点是重量轻,灵活、操作方便、维修方便。
缺点是力量小,铲装能力比不上机械挖掘机。
二、4立方电铲的技术规格及外型尺寸。
注1表中的所列参数为4m3铲斗履带板宽0.9米时的参数,2 4 6m3铲斗用Ⅲ级以下土方。
第二章电铲的结构特点、工作原理本单位有4台机械挖掘机,12台液压挖掘机,下面,我就以4立方电铲为例介绍电铲的工作原理。
4立方电铲主要由正铲工作装置、回转平台及上部结构、底盘及行走机构,电气设备4大部份组成。
一、正铲工作装置主要由1、动臂2、斗杆3、铲斗4、推拉机构5、开斗机构五部份组成。
1、铲斗。
铲斗由斗体(斗前壁和斗后壁)、斗齿、提梁、滑轮和斗底等组成。
斗体的斗前壁用高锰钢铸造,斗后壁用普通碳素钢铸造,两者用焊接塞联结,斗前壁前装有5个斗齿。
提梁由高锰钢铸造。
斗底是由低锰钢铸造的底板和两根高锰钢铸造的斗底横梁及斗栓杆组成。
2、开斗机构,开斗机构的拉杆与夹板固定在轴上,轴位于斗杆横梁下端的耳子内,链条与夹板相联结,拉杆借助钢丝绳与卷筒相联结,卷筒由电动机带动。
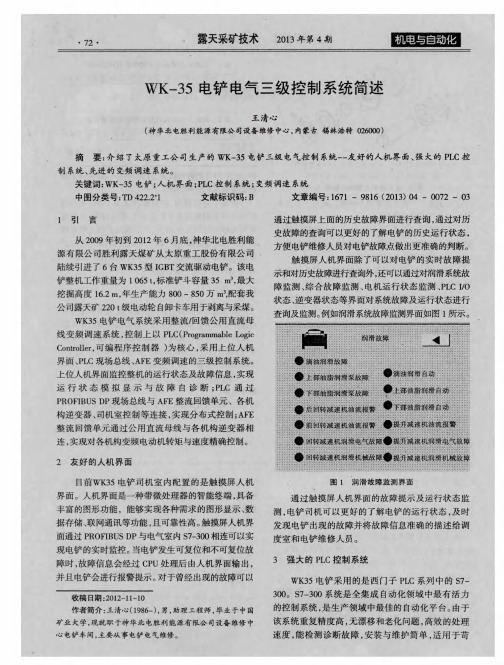
WK-35电铲电气三级控制系统简述
系统有 很高 的 电磁兼 容 性和抗 振 动 、 抗 冲击 能力 , 可
以用 于恶劣环 境 条件 的温度 范 围为一 2 5~+ 7 0℃, 有
器 驱动 ,而右 行走 电动 机与前 提升 电动机共 用 一个
柜 。两 套 A F E滤 波整 流 回馈 柜 并联 运行 , 通 过 主变 压器降压后 的 6 6 0 A C经 滤 波 整 流后 的直 流输 出通 过直 流母 排并 联作 为公用 直流母 线 ,为各机 构逆 变 器 同时提供 9 9 0 V D C,各 机 构 逆 变 器 通 过 将 9 9 0
及诊 断系统 ( 如 图 2所示 ) 。 安装有 S T E P 7的个人 电 脑通过与 S 7 — 3 0 0连 接 能够 完成 电铲 的所 有 控制 任
变频调速传动是现代电气传动的主要发展方向。
相 比其它调速方 式 , 它在提高产 品质量 , 故 障维修 , 生 产过 程 自动化等方 面 , 都有着相 当大 的优势 。它 以工
术, 因此 电铲便 能够 实现 原地扭 转改 变行走 方 向 , 增 加 了 电铲 的灵 活性 。 回转机 构采用 一 台逆变 器驱 动两 台 电动机 。 由 于 2台电动 机 的 电源来 自同一个 逆 变器 , 所 以两 台
求 有 所改 变 时 , 只需 要 在 s 7 — 3 0 0系 统 中的 I / O模 块
上 的接线端子上接人相应的信号线和通过 s T E P 7
软 件修 改程 序 即可 ,不需 要诸 如继 电器 之类 的物 理 电子 器件 和 大量 而又 繁 杂的硬 接线 路 ,因此减 小 了
电动液压铲开合斗液压缸自动收回故障的排查
电动液压铲开合斗液压缸自动收回故障的排查
■ 戴顺祥
云南华联锌铟股份有限公司,云南文山 663000
摘要:工程机械是矿山生产的主要设备,设备的完好率能直接影响生产是否能按计划推进,能否完成公司的效益目标。维修是保障 设备正常运行最主要的方法之一,及时有效的维修能有效保障生产的需求。从利勃海尔 R9250E 型电动液压铲的开合斗液压缸故障 出发,分析其故障原因和解决方式,总结维修经验。 关键词:电动液压铲;开合斗液压缸;故障排查;维修方案
BST
设备 ECM 获取指令,相应电脑模块通电
比例和开关电磁阀 获取电源
主控阀控制模块获取 信号指示先导供油
执行元件(控制阀芯运动)
液压缸执行动作 图 2 设备工作流程图
图 3 次级溢流阀芯卡滞
4 结语
维修是保障设备正常运行最主要的方法之一,及时有 效的维修能有效保障生产的需求。当设备发生故障时,可 能是多方面的因素导致,因此我们排查故障时,需结合故 障特征,全面考虑和分析会导致故障的因素,多方面、多 角度的分析故障和排除原因。这不仅有利于减少维修时间, 降低公司维修成本,还能拓展维修思路。本文中从利勃海 尔 R9250E 型电动液压铲的开合斗液压缸故障出发,分析 其故障原因和解决方式,总结维修经验,可为类似故障的 排查提供参考。■
动作指令
3 故障排查
经检查设备液压缸结构完整,液压缸运行轨迹正常, 无其他物件阻挡液压缸运行。检查液压油回油滤芯,未发 现油料有铁、铜等渣子,液压缸供油管路未产生泄漏,故 可排除液压缸损坏及外力原因导致铲斗自行收回的可能性,
液压电铲的控制与普通挖掘机不同,其动作指令以信 号传递方式到设备 ECM,ECM 获取信号并给电磁阀和先 导指令后,才会有液压泵供油驱动执行元件,完成动作指令。 根据现场线路排查和检测可知,ECM 及各部件信号传递通 畅无误,控制电压正常,比例电磁阀、开关电磁阀、先导 电磁阀均能正常通电,由此可排除 ECM 及控制电路有故障 的可能性。
PRS-753技术说明书V3.01南网版

4.1 信号系统 ..................................................................................................................28 4.2 事故分析与过程记录 ..............................................................................................28
1.1 应用范围 ....................................................................................................................1 1.2 保护配置 ....................................................................................................................1 1.3 主要性能特点 ............................................................................................................2
5 定值及整定说明 ...........................................................................................35
WK-27A电铲行程减速箱的工作原理
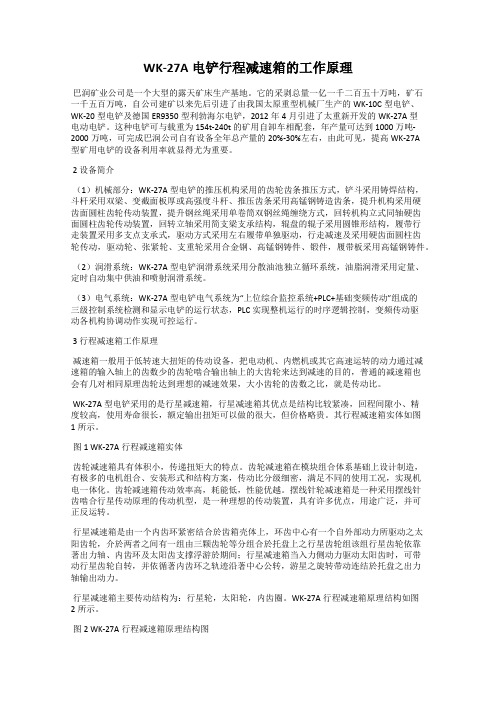
WK-27A电铲行程减速箱的工作原理巴润矿业公司是一个大型的露天矿床生产基地。
它的采剥总量一亿一千二百五十万吨,矿石一千五百万吨,自公司建矿以来先后引进了由我国太原重型机械厂生产的WK-10C型电铲、WK-20型电铲及德国ER9350型利勃海尔电铲,2012年4月引进了太重新开发的WK-27A型电动电铲。
这种电铲可与载重为154t-240t的矿用自卸车相配套,年产量可达到1000万吨-2000万吨,可完成巴润公司自有设备全年总产量的20%-30%左右,由此可见,提高WK-27A型矿用电铲的设备利用率就显得尤为重要。
2 设备简介(1)机械部分:WK-27A型电铲的推压机构采用的齿轮齿条推压方式,铲斗采用铸焊结构,斗杆采用双梁、变截面板厚或高强度斗杆、推压齿条采用高锰钢铸造齿条,提升机构采用硬齿面圆柱齿轮传动装置,提升钢丝绳采用单卷筒双钢丝绳缠绕方式,回转机构立式同轴硬齿面圆柱齿轮传动装置,回转立轴采用简支梁支承结构,辊盘的辊子采用圆锥形结构,履带行走装置采用多支点支承式,驱动方式采用左右履带单独驱动,行走减速及采用硬齿面圆柱齿轮传动,驱动轮、张紧轮、支重轮采用合金钢、高锰钢铸件、锻件,履带板采用高锰钢铸件。
(2)润滑系统:WK-27A型电铲润滑系统采用分散油池独立循环系统,油脂润滑采用定量、定时自动集中供油和喷射润滑系统。
(3)电气系统:WK-27A型电铲电气系统为“上位综合监控系统+PLC+基础变频传动”组成的三级控制系统检测和显示电铲的运行状态,PLC实现整机运行的时序逻辑控制,变频传动驱动各机构协调动作实现可控运行。
3 行程减速箱工作原理减速箱一般用于低转速大扭矩的传动设备,把电动机、内燃机或其它高速运转的动力通过减速箱的输入轴上的齿数少的齿轮啮合输出轴上的大齿轮来达到减速的目的,普通的减速箱也会有几对相同原理齿轮达到理想的减速效果,大小齿轮的齿数之比,就是传动比。
WK-27A型电铲采用的是行星减速箱,行星减速箱其优点是结构比较紧凑,回程间隙小、精度较高,使用寿命很长,额定输出扭矩可以做的很大,但价格略贵。
二、电铲专业知识
二、电铲专业知识365、机械设备故障诊断技术必须完成的任务有那些?答:1)弄清引起机械设备的优劣化或故障的主要原因——应力状况。
2)掌握机械设备劣化,故障的部位、程度及其原因等情况。
3)了解机械设备的性能、强度、效率,作出诊断决策。
4)预测机械设备的可靠性及使用寿命。
366、什么是故障?答:故障是指整机或零部件,在规定时间内和使用条件下不能完成规定的功能,或各项技术经济指标偏离了他的正常情况,但在某种状态下尚能维持一段时间的工作,若不能得到妥善的处理将导致事故。
367、人工涂、注油应注意什么?答:1)向开式齿轮、链条和其它敞露部位涂抹润滑油脂时,首先应将润滑件的油污垢泥沙清除干净,然后在涂油;2)对于行走部位注油时要注到轴颈周边出油为止;3)往钢绳上涂油时最好将油加热,以便使油渗透到钢绳麻芯中去;4)润滑油脂必须纯洁,严禁混油;5)冬季润滑油脂易硬化,可以加入少量机械油搅拌均匀使用。
368、自动润滑的优点是什么?答:1)提升生产力 2)减少人工 3)增加机械可靠性 4)延长机械部件寿命 5)减少油脂消耗 6)改善清洁管理 7)增加轴承寿命369、干油集中润滑系统常用的方式有哪些?答:常用的方式有:双线式、单线递进式、单线式、多线式。
每种方式均有优缺点,应根据不同的润滑要求设计、选用。
370、双线式电动干油润滑系统的组成?答: 双线式电动干油润滑系统主要由电动润滑泵、电动换向阀、压力开关、电控箱、双线分配器、两条主供油管和分支管路组成。
371、双线式电动干油润滑系统的工作原理?答:电动润滑泵输出的润滑脂经过换向阀交替由两条供油管输送到双线分配器进口,经过双线分配器定量分配,送往各个润滑点。
工作过程中,两条主管线压力由换向阀控制,一条升压另一条必须卸压,供油管内的压力达到分配器动作所需的压力,分配器就能动作。
分配器动作完成又使该条供油管内压力继续上升,当供油管内各处的压力都超过分配器动作所需的压力,分配器全部动作,压力上升至压力开关的设定值时,换向阀换向,系统完成一次给油运行。
电铲岗位培训教材

WD—400挖掘机培训教材一、技术规格铲斗容量:4m3 动臂及斗杆长度:10。
5/7。
29m铲斗提升速度:0。
87m/s 最大提升力:450KN斗杆推压速度及推压力:0.45m/s ,230KN回转平台回转速度:3-3。
5r/min 平道行走速度:0.45Km/h履带最大牵引力:800KN 挖掘机的最大爬坡度:12度设备总重:215吨输入电压:6000V 原动机功率:250KW主机构的操纵:电气辅助机构的操纵:电气气压二、挖掘机的主要组成部份1.作业装置:由动臂、推压机构、斗杆、开斗机构和铲斗等组成;2.回转平台及上部结构:由提臂机构、提升机构、中央枢轴、回转机构、气压系统、平台集中润滑系统、回转平台、双足支架、司机室及机棚等组成;3.履带装置及下部结构:由履带架、锥形辊滚盘、底架及行走机构等组成;4.电气系统三、主要组成部份的结构特点及工作原理(一)作业装置1、动臂动臂是作业设备各部件的基架,它的本体是变截面的矩形梁焊接结构,动臂两外侧座在穿于转台销轴上的球面辊子上,由弹性拉手拉紧,其拉紧程度以螺母来进行调节,调节至当转台回转起,制动时动臂支重不脱离球面辊子为宜。
销轴与动臂孔有15mm间隙,其作用是防止当弹性拉手失效时动臂掉落,正常情况该轴不起作用。
端部滑轮用瓦盖压紧固定,提臂滑轮用拉板与端部滑轮轴联接,托绳轮装于动臂中部用于导引提升钢丝绳,此外,动臂下面装有上下缓冲器,由槽钢抱木块组成,以缓冲铲斗对动臂的偶然撞击。
2、推压机构推压机构安装在动臂上,用以实现斗杆的前伸和后退;推压机构由推压轴、中间轴、齿轮、制动器和直流电动机组成。
推压轴两端装有推压齿轮和扶柄,斗杆在扶柄套内与推压齿轮啮合并作往复运动,斗杆上部和两侧都有滑块导引,滑块与斗杆间的间隙可由垫片来调整,滑块磨损后也可借助增加垫片来补偿。
为了防止在过载的作用下推压机构发生破坏,在中间轴上装有气囊式极限力矩离合器(1、2、3#安装的是常闭式的制动器).推压电机左端装有常闭式闸瓦制动器,制动器是借弹簧的张力通过拉杆转动杠杆,则调节杆将两杠杆和闸瓦压向制动轮,致使经常处于制动状态,当向风缸输送压缩空气时弹簧进一步压缩,则杠杆带动闸瓦向两旁分开,脱离制动轮,致使松闸,另外为保证两侧闸瓦均等离开制动轮,调整其间隙是用两侧螺栓来进行调整,螺栓是用来调整闸瓦能均匀地脱开制动轮。
电铲司机要懂电铲基本结构
电铲安全操作规程一启动前检查一、电铲司机接班后,应首先按下列要求查看工作面和周围情况,如认为有险情,应及时告知班长和调度室。
二、检查工作面段高,检查台阶上有无危石、伞檐、冻顶及活动大块。
三、检查地表有无积水及塌陷等情况。
六、检查勺杆、动臂、A型架、提升滚筒有无开焊裂纹,各销轴有无窜出,提升大绳有无错乱。
七、检查绷绳、提升钢绳有无磨损或断丝、断股。
八、检查各部仪表是否正常;九、检查各操作手柄是否灵活好使,提升、推压、回转、行走各部的抱闸是否安全可靠。
十、检查提升、回转、推压、行走传动系统和减速箱有无异常现象,检查减速箱油位是否正常,有无漏油现象。
十五、检查电缆、电缆接线箱有无破损,摆放位置是否合适,并整理好电缆。
十七、检查润滑系统各部位是否正常,油箱黑、黄油油位是否正常够用,管路、接头有无漏油现象。
十九、电铲尾线必须摆放整齐,保证卡车顺利调头,防止重车掉石块砸坏电缆。
二启动二十、按以上检查项目逐项检查,如发现问题立即处理和汇报,处理完毕符合作业条件后,方可作业。
二十一、收起梯子使其到定位位置,并且电脑系统显示梯子已到位后,方可作业。
二十二、制动器开关处于关闭位置,操作手柄处于零位。
二十三、各指示灯必须显示正确。
二十四、试验并开动各驱动机构,确定每个机构正常时方可运转。
二十五、司机检查完毕确认各部位正常,鸣笛三声后,方可启动。
二十六、未装车前,应检查提升上、下限位、推压伸缩限的限位功能是否正常。
三正常操作程序二十七、电铲启动后,应举起勺斗向卡车鸣笛示意开始装车,同时向调度报告电铲开始作业。
二十八、电铲运转中严禁任何人上、下。
必要时,必须通知电铲司机,待电铲停机,铲斗置于地面后,方准人员上、下电铲。
二十九、严禁与本工作面作业的无关设备和人员进入或停留在电铲周围50m半径内。
三十、操作时注意采掘工作面变化,防止大块砸坏电铲和地表下沉陷铲,遇有片帮滑落或地表松软等危险时,应迅速把电铲撤离,开到安全地点,并向有关领导汇报。