自动导引运输车AGV术语
AGV介绍

目前常见的主要有视觉传感器、激光传感器、红外传感器、超声波传感器等
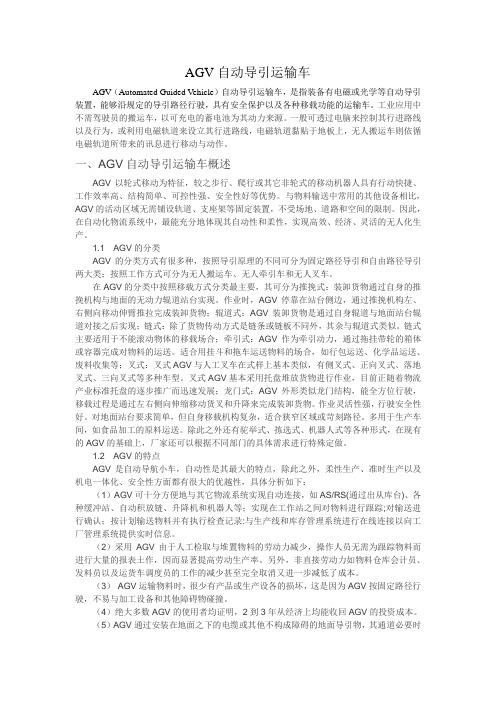
a. 红外 一般的红外测距都是采用 三角测距的原理。红外发射器 按照一定角度发射红外光束, 遇到物体之后,光会反向回来, 检测到反射光之后,通过结构 上的几何三角关系,就可以计 算出物体距离D
红外线角度测距原理
Page 31
www.longigroup.c om
Page 28
www.longigroup.c om
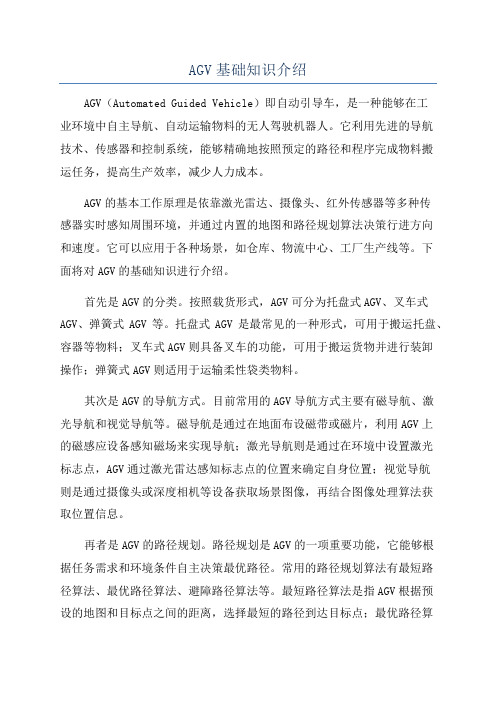
在无人运输车(AGV)头部 下方安装一个RFID读卡器,与 AGV控制系统对接,然后在轨道 节点处安装一个电子标签,并赋 予每个节点上的电子标签一个ID 号和定义,比如节点A处代表 AGV要拐弯,用ID号00001表示, 一旦运输车在经过A处时,RFID 读卡系统会读取A处的电子标签 ID号,并根据ID号的特定指令做 出相对应的拐弯动作,从而实现 AGV调度系统功能、站点定位功 能。如图:
AGV基础介绍
C
目录
一、AGV基本介绍
二、AGV基本结构 三、AGV控制系统
ONTENTS
四、AGV充电系统
Page 2
www.longigroup.c om
一、AGV基本介绍
1. 什么是AGV
AGV是自动导引运输车(Automated Guided Vehicle) 的英文缩写。是指装备有电磁或光学等自动 导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车, AGV是轮式移动机 器人(WMR 一一Wheel Mobile Robot) 的特殊应用。 AGV是一种以电池为动力,装有非接触导引(导引)装置的无人驾驶车辆。它的主要功能表现为能在计 算机监控下, 按路径规划和作业要求, 精确地行走并停靠到指定地点, 完成一系列作业功能。AGV以轮 式移动为特征, 较之步行、爬行或其它非轮式的移动机器人具有行动快捷、工作效率高、结构简单、可 控性强、安全性好等优势。与物料输送中常用的其他设备相比, AGV的活动区域无需铺设轨道、支座架 等固定置,不受场地、道路和空间的限制。因此,在自动化物流系统中,最能充分地体现其自动性和柔性, 实现高效、经济、灵活的无人化生产,人们形象地把AGV称作是现代物流系统的动脉。 AGV可广泛应用于机械、电子、化工、冶金、邮电、汽车、机场、码头、造纸、烟草、家电、 医药、食品、商业、银行、出版印刷、国防等行业。
AGV

自动导引运输车AGVAGV是自动导引运输车(Automated Guided Vehicle)的英文缩写,又名无人搬运车,自动导航车,激光导航车。
是指装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车,AGV属于轮式移动机器人(WMR――Wheeled Mobile Robot)的范畴。
其显著特点的是无人驾驶,AGV上装备有自动导向系统,可以保障系统在不需要人工引航的情况下就能够沿预定的路线自动行驶,将货物或物料自动从起始点运送到目的地。
如今,AGV成了现代自动化物流系统中的关键设备之一,以电池为动力,装备有电磁或光学等自动导航装置,能够独立自动寻址,并通过计算机系统控制完成无人驾驶及作业。
自动引导搬运车是当今柔性制造系统和自动化仓储系统中物流运输的有效手段,也是在物流领域中首推的简单有效的自动物料运输方式。
无人驾驶的电动车通过运用自动运输系统搬运货物,并能在互不干扰的情况下将货物高效可靠地送达目的地。
作为物流设备领域中的新兴设备,自动引导搬运车的使用极大的减轻了人们的劳动强度,提高了物流运作效率和服务质量,降低了物流成本。
AGV以电池为动力,并装有非接触导航(导引)装置,可实现无人驾驶的运输作业。
它的主要功能表现为能在计算机监控下,按路径规划和作业要求,精确地行走并停靠到指定地点,完成一系列作业功能。
AGV以轮式移动为特征,较之步行、爬行或其它非轮式的移动机器人具有行动快捷、工作效率高、结构简单、可控性强、安全性好等优势。
与物料输送中常用的其他设备相比,AGV的活动区域无需铺设轨道、支座架等固定装置,不受场地、道路和空间的限制。
因此,在自动化物流系统中,最能充分地体现其自动性和柔性,实现高效、经济、灵活的无人化生产,所以人们形象地把AGV称作是现代物流系统的动脉。
AGV 优势∙自动化程度高:由计算机,电控设备,激光反射板等控制。
∙充电自动化:当AGV小车的电量即将耗尽时,它会向系统发出请求指令,请求充电,在系统允许后自动到充电的地方“排队”充电。
AGV自动导引小车
AGV自动导引运输车AGV(Automated Guided V ehicle)自动导引运输车,是指装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车。
工业应用中不需驾驶员的搬运车,以可充电的蓄电池为其动力来源。
一般可透过电脑来控制其行进路线以及行为,或利用电磁轨道来设立其行进路线,电磁轨道黏贴于地板上,无人搬运车则依循电磁轨道所带来的讯息进行移动与动作。
一、AGV自动导引运输车概述AGV以轮式移动为特征,较之步行、爬行或其它非轮式的移动机器人具有行动快捷、工作效率高、结构简单、可控性强、安全性好等优势。
与物料输送中常用的其他设备相比,AGV的活动区域无需铺设轨道、支座架等固定装置,不受场地、道路和空间的限制。
因此,在自动化物流系统中,最能充分地体现其自动性和柔性,实现高效、经济、灵活的无人化生产。
1.1 AGV的分类AGV的分类方式有很多种,按照导引原理的不同可分为固定路径导引和自由路径导引两大类;按照工作方式可分为无人搬运车、无人牵引车和无人叉车。
在AGV的分类中按照移载方式分类最主要,其可分为推挽式:装卸货物通过自身的推挽机构与地面的无动力辊道站台实现。
作业时,AGV停靠在站台侧边,通过推挽机构左、右侧向移动伸臂推拉完成装卸货物;辊道式:AGV装卸货物是通过自身辊道与地面站台辊道对接之后实现;链式:除了货物传动方式是链条或链板不同外,其余与辊道式类似。
链式主要适用于不能滚动物体的移载场合;牵引式:AGV作为牵引动力,通过拖挂带轮的箱体或容器完成对物料的运送。
适合用挂斗和拖车运送物料的场合,如行包运送、化学品运送、废料收集等;叉式:叉式AGV与人工叉车在式样上基本类似,有侧叉式、正向叉式、落地叉式、三向叉式等多种车型。
叉式AGV基本采用托盘堆放货物进行作业,目前正随着物流产业标准托盘的逐步推广而迅速发展;龙门式:AGV外形类似龙门结构,能全方位行驶,移载过程是通过左右侧向伸缩移动货叉和升降来完成装卸货物。
AGV自动引导车

AGV(Automated Guided Vehicle)--自动导引运输车是指装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输小车,是自动化物流系统中的关键设备之一。
AGV系统技术含量高,难度大,涉及面广,是集机械,电子,计算应用于一体的高科技产品。
其中AGV单机的主要关键技术主要有:导航,导引及定位技术等;上位控制系统的主要关键技术主要有:任务调度及车辆分配,路径规划及交通管理等......AGV地面控制系统AGV地面控制系统(Stationary System)即AGV上位控制系统,是AGV系统的核心。
其主要功能是对AGV系统(AGVS)中的多台AGV进行任务分配,车辆管理,交通管理,通讯管理等。
任务管理:任务管理类似计算机操作系统的进程管理,它提供对AGV地面控制程序的解释执行环境;提供根据任务优先级和启动时间的调度运行;提供对任务的各种操作如启动、停止、取消等。
车辆管理:车辆管理是AGV管理的核心模块,它根据物料搬运任务的请求,分配调度AGV 执行任务,根据AGV行走时间最短原则,计算AGV的最短行走路径,并控制指挥AGV的行走过程,及时下达装卸货和充电命令。
交通管理:根据AGV的物理尺寸大小、运行状态和路径状况,提供AGV互相自动避让的措施,同时避免车辆互相等待的死锁方法和出现死锁的解除方法;AGV的交通管理主要有行走段分配和死锁报告功能。
通讯管理:通信管理提供AGV地面控制系统与AGV单机、地面监控系统、地面IO设备、车辆仿真系统及上位计算机的通信功能。
和AGV间的通信使用无线电通信方式,需要建立一个无线网络,AGV只和地面系统进行双向通信,AGV间不进行通信,地面控制系统采用轮询方式和多台AGV通信;与地面监控系统、车辆仿真系统、上位计算机的通信使用TCP/IP通信。
车辆驱动:小车驱动负责AGV状态的采集,并向交通管理发出行走段的允许请求,同时把确认段下发AGV。
AGV概述

1 AGV概述1.1什么是AGVAGV是自动导引运输车(Automated Guided Vehicle)的英文缩写。
是指装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车,AGV 是轮式移动机器人(WMR一一Wheel Mobile Robot)的特殊应用。
AGV是一种以电池为动力,装有非接触导航(导引)装置的无人驾驶车辆。
它的主要功能表现为能在计算机监控下,按路径规划和作业要求,精确地行走并停靠到指定地点,完成一系列作业功能。
AGV以轮式移动为特征,较之步行、爬行或其它非轮式的移动机器人具有行动快捷、工作效率高、结构简单、可控性强、安全性好等优势。
与物料输送中常用的其他设备相比,AGV的活动区域无需铺设轨道、支座架等固定装置,不受场地、道路和空间的限制。
因此,在自动化物流系统中,最能充分地体现其自动性和柔性,实现高效、经济、灵活的无人化生产,人们形象地把AGV称作是现代物流系统的动脉。
1.2 AGV系统的优点AGV系统在物流过程中具有重复性、可靠性、灵活性、低成本和安全性等优点。
AGV系统最初用于在较长的距离之间运输货物,尤其适合在多个站台之间运输货物。
但是,还有很多原因让我们选择使用AGV系统。
安全性一一人为驾驶的车辆,其行驶路径无法确知。
而AGV的导引路径却是非明确的,因此大大提高了安全性。
成本控制一一AGV系统的资金投入是短期的,而员工的工资是长期的,还会随着通货膨胀而不断增加。
易维护一一人为驾驶的车辆难免会发生碰撞事故,而AGV采用了防碰撞设备,有效地避免了碰撞事故的发生。
可预测性一一AGV在行驶路径上遇到障碍物会自动停车,而人为驾驶的车辆却未必。
降低产品损伤一一使用AGV系统能减少由于人工粗鲁的操作而造成的货物损坏。
改善物流管理一一由于AGV系统内在的智能控制,能够让货物摆放更加有序,车间更加整洁。
降低操作成本一一电池的充电及管理都由AGV系统自动完成,因此延长了电池寿命及可靠性。
AGV基础知识介绍
AGV基础知识介绍AGV(Automated Guided Vehicle)即自动引导车,是一种能够在工业环境中自主导航、自动运输物料的无人驾驶机器人。
它利用先进的导航技术、传感器和控制系统,能够精确地按照预定的路径和程序完成物料搬运任务,提高生产效率,减少人力成本。
AGV的基本工作原理是依靠激光雷达、摄像头、红外传感器等多种传感器实时感知周围环境,并通过内置的地图和路径规划算法决策行进方向和速度。
它可以应用于各种场景,如仓库、物流中心、工厂生产线等。
下面将对AGV的基础知识进行介绍。
首先是AGV的分类。
按照载货形式,AGV可分为托盘式AGV、叉车式AGV、弹簧式AGV等。
托盘式AGV是最常见的一种形式,可用于搬运托盘、容器等物料;叉车式AGV则具备叉车的功能,可用于搬运货物并进行装卸操作;弹簧式AGV则适用于运输柔性袋类物料。
其次是AGV的导航方式。
目前常用的AGV导航方式主要有磁导航、激光导航和视觉导航等。
磁导航是通过在地面布设磁带或磁片,利用AGV上的磁感应设备感知磁场来实现导航;激光导航则是通过在环境中设置激光标志点,AGV通过激光雷达感知标志点的位置来确定自身位置;视觉导航则是通过摄像头或深度相机等设备获取场景图像,再结合图像处理算法获取位置信息。
再者是AGV的路径规划。
路径规划是AGV的一项重要功能,它能够根据任务需求和环境条件自主决策最优路径。
常用的路径规划算法有最短路径算法、最优路径算法、避障路径算法等。
最短路径算法是指AGV根据预设的地图和目标点之间的距离,选择最短的路径到达目标点;最优路径算法是在最短路径的基础上,综合考虑其他因素如交通流量、时间窗口等,选择最优路径;避障路径算法则是通过传感器感知障碍物,并根据规定的避障策略绕过障碍物。
此外,AGV还具备一些其他功能和特点。
例如,AGV可以与其他设备进行联动,实现与物料搬运相关的操作,如自动装卸货物、自动称重、自动识别等;AGV可以实现多机协同工作,提高搬运效率;AGV还可以通过无线通信和远程监控实现远程操控和故障排除,方便运维管理。
运输与管理AGV的名词解释
运输与管理AGV的名词解释随着科技的不断进步,自动化设备在各个行业中得到了广泛应用。
其中,自动导引车(Automated Guided Vehicle,简称AGV)作为一种自动化运输工具,其在物流、制造业等领域的应用越来越受到关注。
本文将对运输与管理AGV的相关名词进行解释和说明,旨在帮助读者更好地理解和应用这一技术。
一、AGV的基本概念AGV指的是一种可以自主导航、自动装卸物料的无人驾驶车辆。
其主要目的是在工业和商业环境中执行物料运输、装卸以及各种操作任务。
AGV通常使用激光导航、磁性导航或者视觉导航等方式进行定位和导航,能够根据预设路径和规定动作进行工作。
二、运输AGV的分类及特性根据其运输方式和功能,AGV可分为不同类型。
常见的运输AGV包括:牵引车AGV、叉车AGV、载货车AGV等。
牵引车AGV主要用于牵引和拖拉其他设备或货物,如运输车辆、托盘等。
叉车AGV则是一种能够自动完成货物装卸的AGV,其能够根据需求调整叉臂高度和角度,完成货物的搬运工作。
载货车AGV则通过平台提供各种运输载体,如货架、托盘等,以便容纳不同形式和尺寸的货物。
不同类型的AGV在形态和功能上有所差异,但它们都具备以下几个特点:首先,AGV具有自主导航和智能感知能力,能够准确识别和避开障碍物,安全地完成运输任务。
其次,AGV可根据任务需求灵活调整运输路径和速度,能够自动规划和优化运输线路,提高工作效率。
最后,AGV具备与其他设备或者系统的联动能力,能够与仓储管理系统、生产线等进行数据交互,实现自动化和智能化的生产运作。
三、管理AGV的核心技术AGV的管理涉及到多项关键技术,其中包括路径规划、动态调度和对接技术等。
1. 路径规划技术:路径规划是AGV管理的关键技术之一。
它通过对环境和任务需求进行分析,确定最佳路径和动作规划,以实现高效的运输和装卸。
路径规划技术不仅需要考虑路径长度和时间,还要综合考虑安全性、出错率等因素,以提高运输质量和效益。
自动引导车的概念

自动引导车的概念自动引导车(Automatic Guided Vehicle,AGV)是一种能够自主导航、搬运物品以及执行其他任务的无人驾驶车辆。
它可以在工业生产线上或仓储中心内进行自动化物料搬运,提高生产效率和减少劳动力成本。
自动引导车通常由车身、行驶控制系统、感知系统、导航系统和物料搬运系统等部分组成。
车身通常采用电瓶驱动,可以根据不同的工作环境和任务需求进行定制。
行驶控制系统负责控制车辆的速度、转向以及停靠等基本动作。
感知系统可以通过激光雷达、摄像头、红外线传感器等设备,实时感知车辆周围的环境和障碍物,从而进行路径规划和避障。
导航系统通过地磁导航、激光导航、视觉导航等技术,确定车辆的当前位置和目标位置,实现自主导航。
物料搬运系统通常包括机械臂、货叉、传送带等设备,可以根据具体任务需求,完成自动搬运、装载和卸载等操作。
自动引导车的应用领域非常广泛。
在制造业中,它可以在生产线上完成零部件的搬运、机器人的上下料以及成品的运输等任务,提高生产线的灵活性和效率。
在仓储行业中,自动引导车可以代替人工搬运货物,实现自动化仓储、集货和发货,提高效率并减少错误。
在医疗行业中,它可以用于医院内的物资配送,减轻护士的工作负担,提高工作效率。
在物流行业中,自动引导车可以用于货物的搬运、分拣和装载等环节,提高物流的效率和准确性。
自动引导车的优势主要体现在以下几个方面。
首先,它可以24小时不间断地运行,大大提高物流和生产的效率。
其次,自动引导车可以根据实际需求进行灵活调度,可以根据生产计划和任务安排,自动调整工作模式和路径规划,减少人工干预。
再次,自动引导车可以减少人工搬运的风险,特别适用于一些危险环境或重复性高风险的工作场所。
最后,自动引导车还可以减少劳动力成本,降低企业的人工成本和管理难度。
然而,自动引导车的应用还存在一些挑战和限制。
首先,自动引导车的导航和避障能力还需要进一步提升,特别是在复杂的环境中,如交叉路口、狭窄通道或人员密集区域。
物流工具:自动导引搬运车车AGVppt

AGV内部构造 AGV内部构造
AGV-AGV地面(上位)控制系统 AGV-AGV地面(上位)控制系统
AGV地面控制系统(Stationary System)即AGV上位控制系统,是AGV系统的 AGV地面控制系统(Stationary System)即AGV上位控制系统,是AGV系统的
AGV控制系统分为地面(上位)控制系统,车载(单机)控制系 AGV控制系统分为地面(上位)控制引系统,其中,地面控制系统指AGV系统的固定设备, 统及导航/导引系统,其中,地面控制系统指AGV系统的固定设备, 主要负责任务分配,车辆调度,路径(线)管理,交通管理,自 动充电等功能;车载控制系统在收到上位系统的指令后,负责 AGV的导航计算,导引实现,车辆行走,装卸操作等功能;导航/ AGV的导航计算,导引实现,车辆行走,装卸操作等功能;导航/ 导引系统为AGV单机提供系统绝对或相对位置及航向. 导引系统为AGV单机提供系统绝对或相对位置及航向.
客户中心收到客户的电话后,可以通过无线电话与出租
车司机联系,选择离客户最近,又正好空闲的车辆A前 车司机联系,选择离客户最近,又正好空闲的车辆A 往接客,就像AGV的地面控制系统进行的车辆和任务分 往接客,就像AGV的地面控制系统进行的车辆和任务分 配;在车辆A 配;在车辆A前往接客的途中,客户中心可能又接到报 告,有空闲车辆B 告,有空闲车辆B离客户更近,那么客户中心将及时通 知车辆B去接客户,取消车辆A的任务,这就是AGV地面 知车辆B去接客户,取消车辆A的任务,这就是AGV地面 控制系统的动态车辆调度.客户中心对出租车将要行驶 道路的交通状况也了如指掌,能够及时通知各个司机选 择最便捷的道路行驶,该道路所需时间最短,但不一定 是路程最短,因为,最近路程的道路上可能发生了交通 阻塞,这就是AGV地面系统中所完成的路径搜索和路径 阻塞,这就是AGV地面系统中所完成的路径搜索和路径 分配的工作. AGV系统的控制过程就类似这样一家管理先进的出租车 AGV系统的控制过程就类似这样一家管理先进的出租车 公司,物流上位调度系统,AGV地面控制系统和AGV车 公司,物流上位调度系统,AGV地面控制系统和AGV车 载控制系统分别相当于客户,客户中心和出租车司机, AGV地面控制系统和各台AGV之间通过无线通信来交换 AGV地面控制系统和各台AGV之间通过无线通信来交换 信息,调度AGV的作业,并为其选择路径(线),确保 信息,调度AGV的作业,并为其选择路径(线),确保 交通通畅.
AGV技术

AGV技术AGV是(Automated Guided Vehicle)的缩写,意即“自动导引运输车”,是指装备有电磁或光学等自动导引装置,它能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车,AGV属于轮式移动机器人(WMR――Wheeled Mobile Robot)的范畴。
AGV主要三项技术:铰链结构、发动机分置技术和能量反馈。
无人搬运车(Automated Guided Vehicle,简称AGV),指装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车,工业应用中不需驾驶员的搬运车,以可充电之蓄电池为其动力来源。
一般可透过电脑来控制其行进路线以及行为,或利用电磁轨道(electromagnetic path-following system)来设立其行进路线,电磁轨道黏贴於地板上,无人搬运车则依循电磁轨道所带来的讯息进行移动与动作。
AGV以轮式移动为特征,较之步行、爬行或其它非轮式的移动机器人具有行动快捷、工作效率高、结构简单、可控性强、安全性好等优势。
与物料输送中常用的其他设备相比,AGV的活动区域无需铺设轨道、支座架等固定装置,不受场地、道路和空间的限制。
因此,在自动化物流系统中,最能充分地体现其自动性和柔性,实现高效、经济、灵活的无人化生产。
AGV优点(1)自动化程度高;由计算机,电控设备,激光反射板等控制。
当车间某一环节需要辅料时,由工作人员向计算机终端输入相关信息,计算机终端再将信息发送到中央控制室,由专业的技术人员向计算机发出指令,在电控设备的合作下,这一指令最终被AGV接受并执行——将辅料送至相应地点。
(2)充电自动化;当AGV小车的电量即将耗尽时,它会向系统发出请求指令,请求充电(一般技术人员会事先设置好一个值),在系统允许后自动到充电的地方“排队”充电。
另外,AGV小车的电池寿命很长(10年以上),并且每充电15分钟可工作4h左右。
AGV自动导引车

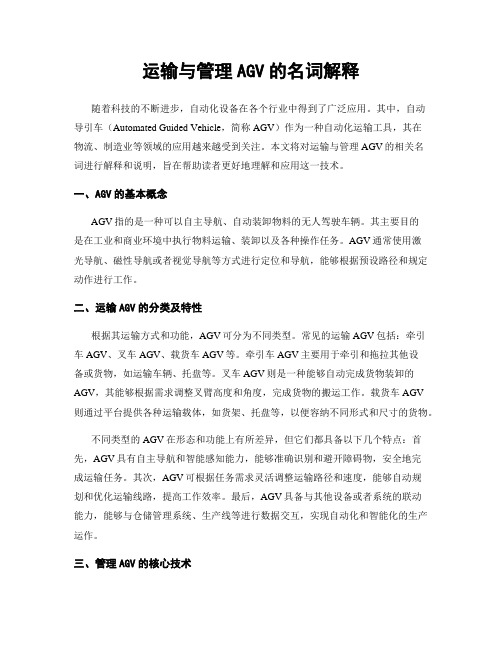
光扫描导引
沿着路径从高处用光束进行 扫描,计算机根据光信息, 精密检测出AGV AGV现在的位置。 精密检测出AGV现在的位置。 这种导引方法路径变换容易, 其光扫描方式也最简单。
信标方式
信标方式(激光导航),这种方式 信标方式(激光导航),这种方式 ), 是在路径上或沿着路径设置多个标 记,标记本身主动发出信号提供有 关位置信息。信标方式是从现在位 关位置信息。 置寻找若干个信标, 置寻找若干个信标,然后根据其方 向和有关信标的位置信息,利用三 向和有关信标的位置信息, 角测量原理计算出现在的位置。 角测量原理计算出现在的位置。这 种方法标记设置简单、廉价,精度 种方法标记设置简单、廉价, 也非常好。 也非常好。
牵 引 式 自 动 导 向 搬 运 车
单元载荷式自动导向搬运车
AGV的导引方式 的导引方式
AGV导引方式是指决定其运行方向和路径 AGV导引方式是指决定其运行方向和路径 的方式。常用的导引方式分为两类: 的方式。常用的导引方式分为两类: 预定路径方式,非预定路径方式。 预定路径方式,非预定路径方式。
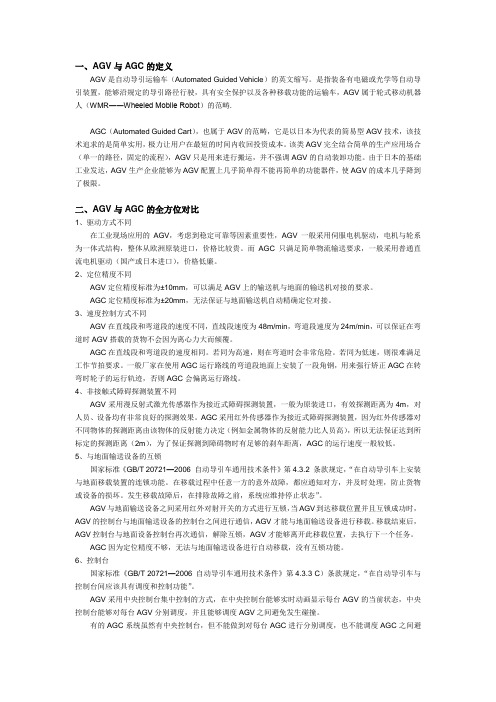
2)磁性式导向。是在地面上连续铺设 )磁性式导向。 一条金属磁带, 一条金属磁带,而在车辆上装有磁性 传感器,检测磁带的磁场, 传感器,检测磁带的磁场,通过磁场 偏差测定控制驱动转向电机来调整车 辆行驶和方向。 辆行驶和方向。 采用该方式的自动搬运车, 采用该方式的自动搬运车,其地面系 统较为简单,施工也较为方便, 统较为简单,施工也较为方便,且可 靠性好,因此得到了普及。 靠性好,因此得到了普及。
这种导引方式是在地面上连续铺设一条用发光材料制作的带子或者用发光涂料涂抹在规定的运行路线上再在车辆的底部装有检测反射光传感器通过偏差测定装置到驱动转向电机来不断调整车辆前进的方向以保持车辆沿着规定的线路行驶
AGV与AGC对比
一、AGV与AGC的定义AGV是自动导引运输车(Automated Guided Vehicle)的英文缩写。
是指装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车,AGV属于轮式移动机器人(WMR――Wheeled Mobile Robot)的范畴.AGC(Automated Guided Cart),也属于AGV的范畴,它是以日本为代表的简易型AGV技术,该技术追求的是简单实用,极力让用户在最短的时间内收回投资成本。
该类AGV完全结合简单的生产应用场合(单一的路径,固定的流程),AGV只是用来进行搬运,并不强调AGV的自动装卸功能。
由于日本的基础工业发达,AGV生产企业能够为AGV配置上几乎简单得不能再简单的功能器件,使AGV的成本几乎降到了极限。
二、AGV与AGC的全方位对比1、驱动方式不同在工业现场应用的AGV,考虑到稳定可靠等因素重要性,AGV一般采用伺服电机驱动,电机与轮系为一体式结构,整体从欧洲原装进口,价格比较贵。
而AGC只满足简单物流输送要求,一般采用普通直流电机驱动(国产或日本进口),价格低廉。
2、定位精度不同AGV定位精度标准为±10mm,可以满足AGV上的输送机与地面的输送机对接的要求。
AGC定位精度标准为±20mm,无法保证与地面输送机自动精确定位对接。
3、速度控制方式不同AGV在直线段和弯道段的速度不同,直线段速度为48m/min,弯道段速度为24m/min,可以保证在弯道时AGV搭载的货物不会因为离心力大而倾覆。
AGC在直线段和弯道段的速度相同。
若同为高速,则在弯道时会非常危险。
若同为低速,则很难满足工作节拍要求。
一般厂家在使用AGC运行路线的弯道段地面上安装了一段角钢,用来强行矫正AGC在转弯时轮子的运行轨迹,否则AGC会偏离运行路线。
4、非接触式障碍探测装置不同AGV采用漫反射式激光传感器作为接近式障碍探测装置,一般为原装进口,有效探测距离为4m,对人员、设备均有非常良好的探测效果。
AGV概述
1 AGV概述1.1什么是AGVAGV是自动导引运输车(Automated Guided Vehicle)的英文缩写。
是指装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车,AGV 是轮式移动机器人(WMR一一Wheel Mobile Robot)的特殊应用。
AGV是一种以电池为动力,装有非接触导航(导引)装置的无人驾驶车辆。
它的主要功能表现为能在计算机监控下,按路径规划和作业要求,精确地行走并停靠到指定地点,完成一系列作业功能。
AGV以轮式移动为特征,较之步行、爬行或其它非轮式的移动机器人具有行动快捷、工作效率高、结构简单、可控性强、安全性好等优势。
与物料输送中常用的其他设备相比,AGV的活动区域无需铺设轨道、支座架等固定装置,不受场地、道路和空间的限制。
因此,在自动化物流系统中,最能充分地体现其自动性和柔性,实现高效、经济、灵活的无人化生产,人们形象地把AGV称作是现代物流系统的动脉。
1.2 AGV系统的优点AGV系统在物流过程中具有重复性、可靠性、灵活性、低成本和安全性等优点。
AGV系统最初用于在较长的距离之间运输货物,尤其适合在多个站台之间运输货物。
但是,还有很多原因让我们选择使用AGV系统。
安全性一一人为驾驶的车辆,其行驶路径无法确知。
而AGV的导引路径却是非明确的,因此大大提高了安全性。
成本控制一一AGV系统的资金投入是短期的,而员工的工资是长期的,还会随着通货膨胀而不断增加。
易维护一一人为驾驶的车辆难免会发生碰撞事故,而AGV采用了防碰撞设备,有效地避免了碰撞事故的发生。
可预测性一一AGV在行驶路径上遇到障碍物会自动停车,而人为驾驶的车辆却未必。
降低产品损伤一一使用AGV系统能减少由于人工粗鲁的操作而造成的货物损坏。
改善物流管理一一由于AGV系统内在的智能控制,能够让货物摆放更加有序,车间更加整洁。
降低操作成本一一电池的充电及管理都由AGV系统自动完成,因此延长了电池寿命及可靠性。
自动导引搬运车

பைடு நூலகம்
分类: 根据导引方式的不同,可分: 1、固定路径导引,包括电磁导引、光导导 引和磁带(磁气)导引。 2、自由路径导引,包括激光导引、惯性导 引等。 根据AGV装卸物料方式的不同,可分: 料 斗式,辊道输送式,链条输送式,垂直升降式, 叉车式。
特点: 运行路线设定灵活 具有检知和避开障碍物的技能 智能化与自动化 可沿多条路径进行 与计算机控制的全自动化生产装配系统有机 的相连 环境保护
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自动导引运输车(AGV)Automated Guided Vehicle是指装备有电磁或光学等自动导引装置,由计算机控制、轮式移动为特征、并且能够沿规定的导引路径自动行驶的运输车辆。
AGV可具有安全防护、移载(装卸)等多种功能。
自动导引运输车系统(AGVS)AGV System具备自动导引运输车特性的一整套系统,一般包括数量不等的AGV车辆,上位控制系统,导航系统,通讯系统和充电系统等。
车载控制系统Onboard control system用于AGV车辆的计算机控制软件及其相关器件的总称。
上位控制系统Host control system用于AGV调度系统的计算机控制软件及其相关器件的总称。
无人驾驶DriverlessAGV的主要特性之一。
系统能力System capacityAGV系统在单位时间内能够实现的最大的搬运能力。
系统可靠性System reliabilityAGV系统正常工作时间所占工作总时间的百分比,由于多台AGV处在并行工作模式中,其中一台发生故障的时间权值为1/n,n为系统中AGV的总台数。
地面固定设备Stationary equipment在AGV系统中,用于上位控制,导航/导引,通讯,充电等设备的总称。
反射板Reflector在激光导引AGV系统中使用的导航或导引标识物。
平面反射板Flat reflector反射板的一种类型,反射面为平面柱状反射板Column reflector反射板的一种类型,反射面为柱面定位标志Position markAGV在停车定位时使用的标识物。
磁带Magnetic tape用于磁带导引AGV系统的地面导引设施,一般是沿AGV的行驶路径将其粘贴于地板表面。
导引线Wire用于电磁导引AGV系统的地面导引设施,一般是沿AGV的行驶路径将其埋于地下。
反光带Reflective tape用于光学导引AGV系统的地面导引标识,按导引传感器的特点,沿AGV的行驶路径喷涂或粘贴相应颜色的色带。
感光带Sensitive tape用于光学导引AGV系统的地面导引标识,按导引传感器的特点,沿AGV的行驶路径粘贴或喷涂相应的化学感光材料。
磁钉Magnet定位标识的一种,用磁性材料做成。
频率发生器Frequency generator用于电磁导引AGV系统的地面导引设施,能够将特定的频率加载至导引线上。
无线接入点Wireless access point以无线局域网方式进行通讯的固定通讯设备。
无线调制解调器Radio modem以射频(RF)方式进行通讯的通讯设备。
无线局域网Wireless LAN用于AGV车辆和上位控制系统通讯的网络。
充电站Charging Station用于AGV车辆充电的设备及地点的总称。
充电连接器Charging connector用于AGV车辆充电连接的器件(包括地面和车载)。
物流调度系统服务器Logistic system server用于运行物流调度系统的计算机。
AGV调度系统服务器AGV dispatch system server用于运行AGV调度系统的计算机。
数据库服务器Data base sever为AGV调度系统存储数据。
关联设备Correlative equipment与AGV系统相关的外部设备,一般是指与AGV协作完成装卸货操作的设备。
物流调度系统Logistic systemAGV系统的上位控制系统,AGV系统的任务可由此系统产生。
AGV调度系统AGV dispatching system调度任务执行、车辆分配、路径分配及交通管制的控制软件。
热启动Warm startAGV调度系统在上一次退停止时保存的运行状态数据的基础上启动执行。
冷启动Cold startAGV调度系统启动执行,重新进行系统初始化。
系统控制接口System Control InterfaceAGV系统向外界提供的控制接口,使得它能够被集成到更大的系统中。
图形监控Graphical monitor以图形化的方式提供对整个AGV系统运行情况的查询和人工干预。
通信协议Communication protocolAGV调度系统和AGV车辆通信使用的通信协议。
通信丢失Lost communicationAGV调度系统和AGV车辆出现通信中断,调度系统无法得到AGV车辆状态。
通信频道Communication channel通信设备使用的频道。
主机地址Host IP address运行AGV调度系统的服务器使用的IP地址。
主机端口Host port运行AGV调度系统的服务器监听端口。
自动充电Auto chargingAGV车辆在AGV调度系统的控制下进行充电。
手动充电Manual chargingAGV车辆在操作人员的控制下进行充电,包括人工指令和手动更换电池两种方式。
柔性FlexibilityAGV系统能够应对各种各样的流程变化或扩展。
日志Log用于存储系统运行时发生的重要事件、错误等信息。
工作流程Work-flowAGV调度系统执行任务时采用的工艺流程。
简单流程Simple work-flow在AGV的一个搬运任务中,只有一次装货,一次卸货。
复杂流程Complex work-flow在AGV的一个搬运任务中,有多次装货或卸货。
任务Order需要AGV调度系统处理的工作。
任务属性Order property任务具有的一些特征性质。
搬运起点Pickup pointAGV装货的地点。
搬运终点Delivery pointAGV卸货的地点。
任务调度Order scheduleAGV调度系统为正在执行的多个任务分配执行时间等资源。
任务优先级Order priority任务执行时间和车辆分配的优先级。
任务流程Order work-flow任务执行时使用的工作流程。
任务取消Order cancelAGV调度系统取消正在执行中的任务,结束任务的执行。
任务变更Order alterAGV调度系统变更正在执行中的任务的搬运起点、搬运终点。
最大任务调度量Maximum number of scheduling orderAGV调度系统能够调度任务的最大数量。
任务周期Order life time任务从生成到结束的时间。
任务响应时间Order response time任务从生成到AGV开始执行任务的时间。
任务执行时间Order execute time任务从开始执行到任务结束的时间。
任务统计Order statistics对AGV调度系统中产生的任务数据进行收集、分析、解释和表述。
计划任务Schemed orderAGV调度系统根据计划自动在特定时间启动的任务。
物流调度系统任务Host orderAGV调度系统根据物流调度系统的命令启动的任务。
人工任务Manual orderAGV调度系统根据操作人员的命令启动的任务。
触发任务Trigged order由某个外部条件触发AGV调度系统启动的任务。
任务查询Order query向AGV调度系统询问任务的执行情况。
任务执行纪录Order execute recordAGV调度系统纪录的任务执行状态和结果。
优先模式Priority modeAGV调度系统优先执行任务的模式。
复合任务Combine orderAGV调度系统通过对任务的优化,可将多个任务结合在一起成为一个复合任务。
充电任务Charge OrderAGV调度系统指挥AGV车辆进行充电的任务。
AGV运行模式AGV running modeAGV运行时的一些标准模式,如:手动,自动,半自动AGV调度AGV scheduleAGV调度系统根据系统当前的情况安排AGV执行任务和行驶。
AGV分配AGV assignment以一定的优化原则将AGV调度系统中的任务分配给各台AGV。
正常工作率AGV health rateAGV无故障工作的时间除以AGV开机时间。
使用率AGV working rateAGV执行任务的时间除以AGV正常工作时间。
空跑率AGV useless running rateAGV为执行任务而空跑的时间除以AGV正常工作时间。
空闲率AGV free time rateAGV没有搬运任务,处于停止的时间除以正常工作时间。
路径搜索Route searchAGV调度系统在规划地图中搜索从搬运起点到搬运终点的路径。
最短路径The shortest route规划地图中从搬运起点到搬运终点的最短路径。
路径规划Layout根据实际的AGV应用环境,为AGV设计规划行驶的路线。
点Point用于AGV车辆正常停车的地点。
节点Node指路径规划地图上的分流点及合流点。
待命点Wait point空闲AGV等待命令的点。
自动插入点Auto insert pointAGV进行自动插入的点,从而确定自身的位置。
避让点Evading pointAGV车辆之间进行相互避让的点。
通信点Communication pointAGV和AGV调度系统之间进行通信的点。
段SegmentAGV车辆严格遵照行驶的点和点之间的轨迹路线。
直线段Linear segment几何形状是直线的段。
曲线段Curving segment几何形状是曲线的段。
站台Station用于AGV车辆执行操作(如装卸,充电等)的设备和地点。
装货站台Pickup station用于辅助AGV车辆进行装货的设备或地点。
卸货站台Delivery station用于辅助AGV车辆进行卸货的设备或地点。
复合站台Combined stationAGV车辆既能够进行装货又卸货的站台。
交通管制Traffic controlAGV调度系统对多台AGV车辆运行时的交通进行实时的管理和控制。
交通阻塞Traffic block行驶路线被别的AGV车辆或物体占用,导致AGV停车等待,称为交通阻塞。
死锁Dead lockAGV车辆向AGV调度系统请求不可能得到的路径资源。
合流Confluence在路径规划地图上,多条路径汇合成为一条路径。
分流Diffluence在路径规划地图上,一条路径分开成为多条路径。
导引模式Guidance modeAGV车辆采用的导航方式或导引算法导航Navigation确定AGV车辆在全局坐标系中的位置及航向导引Guidance按路径所提供的目标值计算出实际控制命令值,即给出AGV车辆的设定速度和转向角。
电磁导引(Inductive) Wire Guidance以电磁传感器获取导引信息,以定位传感器获取相对位置的导引模式。
磁带导引Magnetic tape guidance以磁带传感器获取导引信息,以定位传感器获取相对位置的导引模式。
光学导引Optical guidance以光学传感器获取导引信息,以定位传感器获取相对位置的导引模式。