CAN总线技术及其在混合动力电动车上的应用
CAN总线简介(2024版)

驱动系统的高速CAN
• 驱动系统CAN主要连接对象是发动机控制器 (ECU)、ABS控制器、安全气囊控制器、 组合仪表等等,它们的基本特征相同,都是 控制与汽车行驶直接相关的系统。
倍。这种传统布线方法不能适应汽车的发展。CAN总线可有效减少线束,节省空间。
例如某车门-后视镜、摇窗机、门锁控制等的传统布线需要20-30 根,应用总线 CAN 则
只需要 2 根。(3)关联控制在一定事故下,需要对各ECU进行关联控制,而这是传统
汽车控制方法难以完成的表1 汽车部分电控单元数据发送、接受情况
• (5)直接通信距离最远可达10km(速率5Kbps以下)。
• (6)通信速率最高可达1MB/s(此时距离最长40m)。
• (7)节点数实际可达110个。
• (8)采用短帧结构,每一帧的有效字节数为8个。
• (9)每帧信息都有CRC校验及其他检错措施,数据出错 率极低。
• (10)通信介质可采用双绞线,同轴电缆和光导纤维,一 般采用廉价的双绞线即可,无特殊要求。
可靠性高:传输故障(不论是由内部还是外部引起 的)应能准确识别出来 使用方便:如果某一控制单元出现故障,其余系统 应尽可能保持原有功能,以便进行信息交换 数据密度大:所有控制单元在任一瞬时的信息状态 均相同,这样就使得两控制单元之间不会有数据偏 差。如果系统的某一处有故障,那么总线上所有连 接的元件都会得到通知。 数据传输快:连成网络的各元件之间的数据交换速 率必须很快,这样才能满足实时要求。
• (2)网络上的节点(信息)可分成不同的优先级,可以满 足不同的实时要求。
混合动力汽车CAN总线触摸屏仪表设计
混合动力汽车CAN总线触摸屏仪表设计除了一些刚成立的主机厂重新开发混合动力汽车整车平台外,大多数动力系统设计方案是在原有传统燃油车动力系统平台的基础上改制而成。
混合动力汽车(hybird electrical vehicle,HEV)车用仪表可以基于原有仪表,再加装一个显示屏,以补充显示油电混合动力汽车所需的重要信息。
这种仪表方案比直接开发一款新的混合动力汽车专用仪表的性价比更高。
目前,汽车平台核心总线都是基于控制器局域网络(COntrOlIer area network,CAN)总线。
混合动力汽车也不例外。
基于这个思路及项目的特殊性,本文详细介绍了一种基于CAN总线触摸屏的新增混合动力汽车仪表设计方案。
当然,该方案也适用于整个全新仪表的重新定义与开发。
1.仪表在HEV电子电气架构中的作用HEV是指在传统动力汽车的基础上再加装一套其他动力控制系统的新型汽车。
仪表是人和汽车的交互界面,为驾驶员提供所需的汽车运行参数、故障、里程等信息,是每一辆汽车必不可少的部件。
在混合动力汽车电子电气架构中,除了要显示传统燃油车相关信息外, 主要是需要补充显示电动汽车动力系统相关信息。
这些信息来源以CAN总线为主。
CAN总线技术得到了广泛的应用,将对汽车电子技术发展起到积极推进作用。
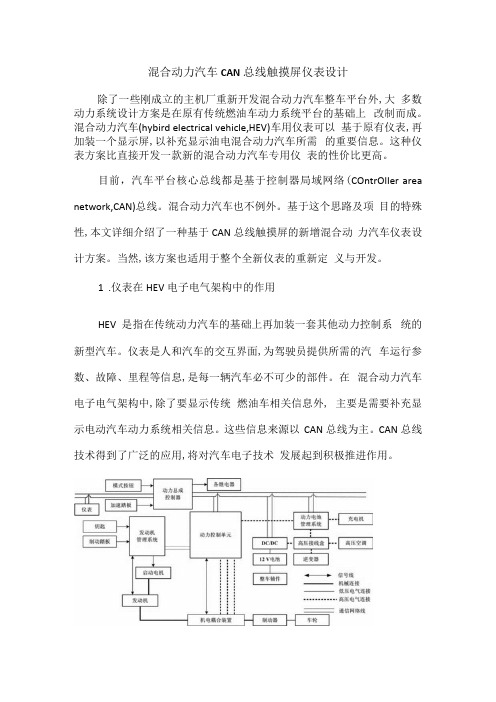
图1图1是某混合动力汽车CAN总线拓扑图。
动力总成控制器作为网关,连接动力系统CAN及原车CAN总线网络。
为了CAN总线负载均衡及总线节点布置位置优化,新增的触摸屏仪表也放置在原车CAN总线网络。
各总线网络通信速率都为50Okbit/S。
动力系统网络有动力控制单元、车载直流/直流(direct current direct current, DC∕DC)变换器及电池管理系统等。
发动机控制器主要与动力控制单元通信,放在动力控制单元子网络中。
车载充电机主要与动力电池管理系统通信,故放置在电池管理系统子网中。
在新增混合动力系统中,除了这些控制器节点外,还需要有发动机及电动机2种动力耦合的装置及高压转接分配的高压接线盒等。
基于CAN总线电动车混合制动系统

高性能的电动汽车 有赖 于组成 该汽 车的各 个子 系统 的协 调工作 , 同时 , 各个子系统之间也 要求对 车辆检测参数 的共 享 , 这就要求各个子系 统之 间的通信 具有 较强 的实时性 和信 息共
享性 。目前 , 国外广 泛采用 了 C A N( C o n t r o l l e r A r e a N e t w o r k ) 总
Ke y wo r d s : C AN b u s ; e l e c t i r c v e h i c l e ; b r e a k i n g s y s t e m; c o mmmu n i c a t i o n
0 言
动相结合的制动模式 。
1 . 1 系统 的结构 系统 由 8个节点构成 , 包括: 前轮 速度节 点 , 左 后轮速 度节
摘要 : 介 绍 了一种基 于 C A N总线 电动 车的制动 系统 的设计 方法。系统中采 用 A R M 7为 中心控制器 , 采用 P 8 7 C 5 9 1为 各个 C A N检测节点的控制 器, 实时的采 集车辆运行状 态信号通 过 C A N总 线送至各 个控制 节点 , 系统根据 制动 情况的 不
Ab s t r a c t : An e l e c t r i c v e h i c l e b r e a k i n g s y s t e m b a s e d o n C AN b u s w a s d e s i g n e d . B y u s i n g ARM7 a s t h e ma i n c o n t r o l l e r , P 8 7 C 5 9 1 a s t h e d e t e c t i n g n o d e c o n t r o l l e r . T h e s y s t e m c o l l e c t e d t h e p a r a me t e r o f e l e c t r i c v e h i c l e r e a l t i me t h r o u g h C AN b u s , t h e n s e n t t h e i n f o r ma t i o n t o t h e ma i n c o n t r o l l e r . Ac c o r d i n g t o d i f f e r e n t b r e a k i n g c o n d i t i o n s , t h e s y s t e m c a n c o mb i n e p o w e r f e e d b a c k b r e a k i n g, me c h a n i c a l b r e a k i n g , a n d AB S b r e a k i n g t o r e a l i z e b r e a k i n g f u n c t i o n p r o p e r l y . I t ma i n l y f o c u s e s o n t h e h a r d w a r e d e s i g n f o t h e i n t e l l i g e n t n o d e .
CAN总线在汽车上的应用

CAN总线在汽车上的应用雷宇 511101807摘要:CAN(Controller Area Network)即控制器局域网络,属于工业现场总线的范畴。
CAN 总线的数据通信具有突出的可靠性、实时性和灵活性。
由于其良好的性能及独特的设计,汽车领域内最广泛的应用了CAN 总线来实现汽车内部控制系统与各检测和执行机构间的数据通信。
本文的重点就是详细介绍CAN总线在汽车上的具体应用。
关键词:CAN 总线汽车引言自上世纪80年代以后,汽车领域得到了飞速的发展,而单片机与集成电路都广泛应用于汽车上。
防抱死制动装置、电子燃油喷射装置、主动悬架、安全气囊装置、电控门窗装置等等这些电子控制单元在汽车上的应用也越来越多,但是常规的布线方式,已经不适于飞速发展的汽车。
原始的布线方式为电线一端与开关连接,另一端与欧诺供电设备连接,这种连接方式大大增加了电线的数量,虽然在一定程度上,电控系统确实增加了汽车的经济型、动力性、舒适性,但是他复杂的线路将提高维修的难度,也降低了汽车的可靠性。
在此环境的影响下,越来越多人想要运用一种新兴的概念——CAN来解决此问题。
一.CAN总线概述1.1CAN总线基本概念控制器局域网络(Controller Area Network)简称为CAN,在汽车产业中,出于对安全性、舒适性、方便性、低公害、低成本的要求,各种各样的电子控制系统被开发了出来。
由于这些系统之间通信所用的数据类型及对可靠性的要求不尽相同,由多条总线构成的情况很多,线束的数量也随之增加。
为适应“减少线束的数量”、“通过多个LAN,进行大量数据的高速通信”的需要,1986年德国电气商博世公司开发出面向汽车的CAN 通信协议。
此后,CAN通过ISO11898 及ISO11519进行了标准化,现在在欧洲已是汽车网络的标准协议。
目前,全世界有20多家CAN生产商,有110多种CAN总线协议控制器芯片和集成CAN总线协议控制器的微处理器芯片。
基于CAN总线的混合动力机车控制系统研究

基于CAN总线的混合动力机车控制系统研究混合动力机车作为一种新型的环保型交通工具,受到了广泛关注。
与传统的内燃机驱动机车相比,混合动力机车可以减少对环境的污染,提高能源利用效率。
在混合动力机车的控制系统中,CAN总线技术起到了至关重要的作用。
本文将研究基于CAN总线的混合动力机车控制系统,并探讨其在提高机车性能和可靠性方面的应用。
首先,本文将分析CAN总线技术在机车控制系统中的优势。
CAN总线是一种高级别、面向对象的通信协议,具有高度可靠性、高带宽和低延迟的特点。
在混合动力机车控制系统中,CAN总线可以实现多个控制单元之间的高速数据交换和通信,提高系统的整体性能和响应速度。
其次,本文将讨论混合动力机车控制系统中,CAN总线的架构和通信协议。
在混合动力机车控制系统中,通常采用主-从的通信结构,其中一个中央控制器作为主节点,控制和监控整个系统的运行。
其他各个子控制单元作为从节点,负责执行不同的控制任务。
通过CAN总线,主节点可以与从节点进行数据的传输和通信,实现控制指令的下发和数据的采集与反馈。
接下来,本文将详细介绍混合动力机车控制系统中CAN总线在不同功能模块中的应用。
首先是动力系统控制模块,它负责管理混合动力机车的内燃机和电动机的运行,控制能量的传递和调度。
通过CAN总线,动力系统控制模块可以监控和调整发动机和电动机的工作状态,实现高效的能量转换和提高机车的动力性能。
其次是能量回收与储存系统控制模块,它主要负责管理混合动力机车中的能量回收与储存系统,如回收制动能量和电池管理系统。
通过CAN总线,能量回收与储存系统控制模块可以实时监测和控制能量的回收和储存过程,提高能源的利用效率和机车的经济性。
另外,本文将探讨CAN总线在车辆动力控制与驱动系统中的应用。
CAN总线可以实现与发动机控制单元、变速器控制单元和驱动电机控制单元之间的高速通信,实现动力系统的精确控制和协同工作,提高机车的性能和可靠性。
最后,本文将重点介绍CAN总线在故障诊断和维护方面的应用。
7 电动汽车上CAN报文解析
电动汽车上CAN报文解析电动汽车,以电池和电机系统取代了内燃机汽车的发动机系统,使得汽车上主要的结构和电气件发生了很大变化。
在传统汽车上已经比较成熟的CAN总线技术,电动汽车仍然需要作出必要调整才能够使用。
1电动汽车的CAN协议常用车辆CAN总线通讯协议,大多直接采用SAE-J1939的形式制定。
电动汽车首先遇到了电池系统,电机系统等新加入电气需要重新设定PGN 码等问题。
CAN协议始终处在诸侯割据的状态。
在过去的几年中,国家及相关机构也一直在对电动汽车的CAN通讯协议进行研究,希望形成统一的协议体系。
统一的CAN协议,首先是零部件供应商的福音。
当前主流主机厂,每家都有自己的整车通讯协议,各个供应商,需要根据整车厂的定义,修改零部件的CAN协议。
制定电动汽车的CAN协议,基本的思路是在SAE-J1939的基础上,根据自身电动汽车的需求,做出必要的调整。
1.1 原则常用的CAN总线协议标准SAE-J1939中,标准给OSI(开放系统互联参考模型)定义成七层:物理层,数据链路层,网络层,传输层,会话层,表示层,应用层。
其中物理层和数据链路层是最基础的两层,在标准ISO 11898中进行定义,并且不可变更。
而SAE-J1939定义了应用层的相关会话规则,所谓通讯协议。
因此我国的CAN 通信协议的制定主要包括物理层和应用层协议两个方面,其中最主要的工作还是集中在应用层上。
1.2 物理层物理层对一系列硬件参数进行了规定,包含总线供电电压、接入系统设备数目、允许的连接器类型、线缆长度以及波特率等。
我们的物理层特性基本完全继承J1939物理层规范,相应的,参数基本与J1939保持一致。
比如CAN2.0B,接入系统的设备书目,最多30个;终端电阻阻值120欧姆,波特率250bits,线束建议采用双绞线、同轴电缆等等。
1.3 应用层应用层主要规定的内容包括:标识符的分配,报文的发送和接收规则,系统内节点的优先级分配等等。
基于CAN总线的纯电动汽车组合仪表设计

仲裁技术 以及灵活的通讯方式适应 了汽车的实时 性 和可 靠 性 要 求 , 备 受 汽 车 厂 商 的青 睐 。对 现 代
汽车 而 言 , 汽车 仪 表 是 汽 车 工 作 状 态 的 信 息 显 示 中心 , 是 驾驶 员 与汽 车进 行 信 息 交 流 的平 台 , 是 保
证汽 车 安全行 驶 的关 键零 部件 之 一 。
c h i p. S p e l l s o u t t h e h a r d wa r e  ̄o p e r a t i n g p r i n c i p l e a n d c i r c u i t a s w e l l a s s o f t wa r e d e s i g n i d e a a n d l f o w
pa t h. he t e s t r e s u l t s s h o w t h a t t he p o i n t e r s o f i ns t r ume n t i n d i c a t e c o r r e c t l y a n d s t a b l y,a n d t h e mi l e - a g e,a l a r m LED a nd g e a r po s i t i o n d i s p l a y a c c ur a t e l y .
上海 汽车
2 0 1 3 . 0 3
・
2l ・
5 1 2 k B 的F l a s h存 储器 、 6 4 k B的数 据 存 储器 、 以 太
网 MA C、 U S B主机/ 从机/ O T G接 口、 8通 道 的通 用
外 围器件 便 可 构 成 一 种 高 效 的稳 压 电路 , 内部 内容 为
CAN/LIN总线在商用车上的应用

CAN/LIN总线在商用车上的应用CAN及LIN总线是目前广泛应用于汽车电子系统中的两种通讯总线,在商用车中也得到了广泛应用。
本文将从概述、应用场景、特点等多个角度阐述CAN与LIN在商用车上的应用。
一、概述CAN(Controller Area Network,控制器局域网络)总线是一种串行通信协议,最早由德国博世(Bosch)公司于1986年开发。
它是商用车的通信标准,被广泛应用于车辆电子控制系统,如发动机控制、车身控制等领域。
LIN(Local Interconnect Network,局域互联网)总线是基于串行通信技术的网络,是为低速、简单的应用场景设计的。
它通常用于控制次要或不需要高速通信的系统,如门锁、天窗、后视镜等。
二、应用场景1. CAN总线在商用车上的应用a. 发动机控制CAN总线被广泛应用于发动机控制系统,它可以实现与各种传感器和执行机构之间的高速、精确、可靠的通讯,包括发动机电脑、节气门、油门踏板位置传感器、氧气传感器、空气流量传感器、机油压力传感器等。
b. 前照灯控制CAN总线也可以控制前照灯的开关,包括近光灯和远光灯。
它可以与光敏传感器进行通信,根据光线强度自动调节照明强度以避免驾驶员的视觉疲劳。
c. 刹车系统CAN总线也可以控制商用车的刹车系统,包括制动液压泵、制动调节器、电子刹车力分配器以及其他相关组件。
这些组件与CAN总线相连,可以使刹车系统更加安全和精确。
d. 传感器与控制器CAN总线也可以连接商用车上的各种传感器和控制器,如车速、转速、加速度和方向等。
它们可以帮助汽车系统更好地控制车辆并保证驾驶员的安全。
2. LIN总线在商用车上的应用a. 车门锁LIN总线可以在商用车的车门锁中应用,它可以用于车门控制单元之间的通讯,以实现集中式或分布式电子门锁控制。
b. 天窗控制类似于车门锁控制,LIN总线也可以用于商用车的天窗控制系统。
它可以连接到天窗的电机控制电路上,以便对车辆中天窗的位置进行监测并控制。
can总线及其应用和前景

C A N总线及其应用和前景韩峰(大庆市油田化工有限公司冬昊表活剂分公司,黑龙江大庆163411)应用科技砖商要]论述了场总线技术在控制系统中应用的意义,对关于现场总线CA N与生活息息相关的各种应用领域和使用较多汽车领域和其他几个领域的也做了相关的介绍。
对现场总线C A N发展前景进行了进一步的探讨和阐述,提出对我国C A N应用情况的看法。
睽键词]C A N;应用;综述现场总线(F Cs_—斗i el dbusConr t ol Sys t em)是应用在生产现场、微机化测量控制设备之间的底层控制网络。
可以说,计算机网络把人类引入到信息时代,现场总线使自控系统与设备加入到信息网络的行列,使企业信息沟通的覆盖范围一直延伸到生产现场。
目前,国际上主要有基金会现场总线FF(Foundat i on Fi el dbus)、PR O FI B U S现场总线、L onW or k(L ocal O p e r at ing N e t w or k)现场总线以及C A N (Cont r o l A r e a N enw ork)总线等代表性的现场总线标准及其系列产品。
C A N具有突出的可靠性、实时性和灵活性,己经形成国际标;隹,已广泛应用于各个领域,并起着重要作用。
1现场总线C A NC A N总线是德国B O SC H公司从80年代初为解决现代汽车中众多的控制与测试仪器之间的数据交换而研发的一种串行数据通信协议,它是一种多主总线,通信介质可以是双绞线、同轴电缆或光导纤维,通信速率可达1M B PS。
C A N现场总线是现场总线中基于C A N协议的一种总线技术。
C A N总线通信接口中集成了C A N协议的物理层和数据链路层功能,可完成对通信数据的成帧处理,包括位填充、数据块编码、循环冗佘检验、优先级判别等项工作。
C A N协议的最大特点是用对通信数据块进行编码取代了传统的站地址编码,其优点在于使网络内的节点个数在理论上不受限制,数据块的标识码可由11位或29位二进制数组成,可以定义211或229个不同的数据块,使不同的节点同时接收到相同的数据。
CAN总线技术及其在汽车控制中的应用 (1)

●CAN报文处理程序设计
CAN协议只关心报文内容,而不必关心报文
的目的地址。因此,下位节点采集数据后或收到数
据发送请求报文后,以广播方式向总线发送报文。
现
当通过滤波验收的数据报文被接收后,将有两 代
种操作方式:一种是中断方式,若接收中断开放位 计
允许,则产生中断;另一种是查询方式,查询接收状 算
态位,DN=I表示接收缓冲区有数据。由于汽车控
然后,根据报文优先级确定报文ID。表1列出 了汽车各电控单元产生及发送的数据类型。
本系统遵循CAN2.0A技术规范,报文采用标 准帧格式进行通信,报文ID长度为11 bit。结合应 用实际,我们最终确定5种报文,并根据优先级高 低分别为它们编制了相应的报文ID,如表1所示。
(3)CAN智能节点的设计 ①上位机节点设计 系统中设置了一个上位机节点,此节点由PC 机和CAN通信适配卡组成。PC机可选用PⅢ800/
引言
CAN总线是德国BOSCH公司在80年代初为 解决现代汽车中众多的控制与测试仪器之间的数 据交换而开发的一种串行数据通信总线。由于采 用了许多新技术及独特的设计,CAN总线的数据 通信具有突出的可靠性、实时性、灵活性、开放性等 特点。在国外,CAN总线技术已得到了广泛的应 用,上至卫星,下至工业控制,尤其在汽车工业,如 奔驰、宝马、大众、沃尔沃、雷诺及帕里奥汽车都采 用了CAN总线技术。然而,在国内自主开发的汽车 中。CAN总线技术的应用研究尚处起步阶段。
实时要求。优先级最高的节点,其数据等待时间小 --
上
于134wS。
八
五
期
o MODERN COMPUTER 2003.6
Байду номын сангаас
v
混合动力汽车CAN总线通信系统的设计与测试
110
交通信息与安全 2012年 5期 第30卷 总171期
协议中没有对它 们 进 行 定 义,因 此 本 文 对 这 些 新
部件 ECU 的源地址 进 行 了 定 义。 综 合 各 信 息 帧
的优先级、数据页、PDU 和 ECU 源地址就得到了 各 信 息 帧 的ID[3],具 体 参 数 定 义 见 表 2。
1 混 合 动 力 总 成 控 制 系 统 的 CAN 通讯设计
1.1 混 合 动 力 控 制 系 统 网 络 拓 扑 在典型的混合 动 力 控 制 系 统 中,各 控 制 单 元
构 成 了 1 个 分 布 式 车 载 网 络 ,见 图 1。 整车网络采 用 线 性 拓 扑 结 构[1],总 线 干 线 的
表 2 部 分 通 信 报 文 参 数 设 计 Tab.2 Communication message parameter design
发送节点
数据帧 优先 数据 PDU PDU ECU 序号 级 页 格式 特性 源地址
信 息ID
整车控制 第1帧 2 0 02 30 10 08023010 单元(HCU) 第2帧 2 0 01 20 10 08012010
电机控制 第1帧 3 0 00 10 20 0C001020 单元(MCU) 第2帧 3 0 02 10 20 0C021020
0 引 言
与传统的汽车 相 比,混 合 动 力 电 动 汽 车 (hy- brid electric vehicle,HEV)存 在 大 量 高 压 元 器 件,比 如 高 压 动 力 电 池、电 机、DC/DC 等 设 备,会 对自身弱电设备 产 生 严 重 的 干 扰,所 以 要 求 各 种 控制信号在传输过程中具有强大的抗干扰能力。 同时由于混合动力电动车不仅包含发动机系统, 还存在电驱动系 统 以 及 电 池 管 理 系 统 等,因 此 其 控制系 统 十 分 复 杂。控 制 节 点 的 大 量 增 加 使 HEV 控 制 装 置 需 要 相 互 交 换 的 信 息 增 多,而 且 动力系统控制本身还要求具有很高的实时性。因 此,提 高 CAN 总 线 的 抗 干 扰 性 和 通 信 的 实 时 性 是本文研究的重点。
浅谈公交混合动力车CAN总线维修

灯光控' 制 ecu!
IE
刮水洗涤' 电动座n||门锁防\\I电动车I 后视镜喇['气候控' 报警信' 仪表显 控制ECU 椅ECU | 盗ECU || 窗ECU | 叭ECU | 制ECU 号ECU 示ECU
CAN络上,其工原理在这里不再赘述。线
图1各设备网络布局
收稿日期:2018-04-25
《"车电%》2019年第7期
变了一
系的,车维修
, 在进行 车维修 W
动
的可性。
(
章子)
1. 来稿请作者注明承诺:“此稿为原创,专供《汽车电 器》”。本刊不接受一稿多投。稿件文责自负。
2. 来稿请以WORD文档形式,字数(含图)控制在 6000字以内(“整车电路”栏目除外)+
3. 图片请单独发JPG格式清晰原图,并备注图名,图 中英文翻译为中文。
码。如属专著,著录项目格式为:[序号/作者.书名:文献类
型标识].出版地:出版社,出版年:起-止页码。文献类型标
识为:专著(M)、论文集(C)、报纸文章(N)、期刊文章(J)、
CAN总线
随着汽车工业技术水平的突飞猛进0新技术、新设备
在汽车上的应用可谓是日新月异,CAN总线以其系统数据
稳定、可靠、干扰小、抗干扰能力强等良好的性能和独特
的设计0越来越深受青睐。在汽车上应用CAN总线0实现
汽车内部控制系统与各检测和执行机构间的数据通信不仅
可以减少车身布线,减少各种传感器设置,节约成本,并
系统
线的
车
便利,
特别对公交大客车应用CAN总线是
。新技术
的 对 技术 的技术
的。
来,公交车应用CAN总线
CAN总线及其在公交车上的应用1
133
3. CAN车辆仪表一般性故障
136
4.液晶显示屏一般性故障
140
5.汽车微机系统使用时注意事项
141
一 CAN总线基本知识
1.CAN总线的概念和作用
6
2.CAN总线网络组成和传输线路
16
3.CAN总线信号生成和信息数据的传输
30
4.VITI-CAN总线技术的优点
39
4
CAN总线的概念和作用
当 CAN 总线网络工作后,用万用表测量 CAN-H 信号线对地电压 值为:2.3~2.4 V 左右。
当 CAN 总线网络工作后,用万用表测量 CAN-L 信号线对地电压 值为:2.3~2.4 V 左右。
当 CAN 总线网络工作后,用万用表测量 CAN-H 和 CAN-L 两根 信号线之间的电压值为:0 V 左右。
注解:SAE(Society of Automotive Engineer)美国汽车工程师协会。
6
CAN总线的概念和作用
CAN总线网络数据传输分为: 1. A 类 — LIN:面向传感器或执行器管理的低速网络,传输数据的 位数率通常小于10Kbps ,是低速开放式串行通讯的一种,属于汽车低层网 络协议范畴,定位于低于CAN总线网络的通信层,一般使用单线连接。 LIN全称为“Local Interconnect Network”,是局部连接网络的意 思, 2. B 类 — CAN:面向独立控制的模块间信息共享的中速网络,传 输数据的位数率一般在10~125Kbps之间,用于仪表显示和车辆控制。 3. C 类 — 高速 CAN:面向闭环实施多路传输的高速网,传输数据 的位数率一般在125Kbps~1Mbps之间,通讯协议为高层的 J1939,用于 动力装置的通讯。 4. D 类 — 面向多媒体,VCD、DVD、CD等,传输数据的位数率一 般在2Mbps。
电动车电气设计及CAN通讯
DATA FIELD 0~64
对应P值 0H 1H 2H 3H 4H 5H 6H 7H
CN2004B DATA定义格式与ID定义
输出点 接受点
字节1
字节2
字节3
字节4
VCU
MCU
电机期望转速
电机期望转矩
VCU
ECU
发动机期望转速
发动机期望转矩
VCU
TCU 期望油门开度 最速指令
VCU
BCU
电池状态指令
CVT与发动机ECU 电池管理系统
车辆管理单元
人机界面 加速踏板 制动踏板
发送信息
接收信息
电机转速、扭矩、温度;电枢 电机设定转速、加速、制
电流、电压、报警信号和错误 动、正反转、启动停止命
代码等
令等
发动机转速、扭矩、功率; CVT当前速比、CVT极限位置
发动机空燃比、点火系统 等在各种工况下的控制
最大放电 电流指令
最大充电 电流指令
SOC上限
VCU
ACU ACU状态指令
字节5
电机状态 指令
发动机状 态指令
字节6
电机期望 速比
发动机期 望速比
SOC下限
D6
字节7
字节8
CAN200B _ID 定义
0C8000004H
0C8000002H
0C8000203H
0C8000214H
0D0000284H
电池电压、温度、充放电电流、 启动停止命令等 功率强度、剩余电量、报警信 息等
电机设定转速、设定扭矩、正 反转、发动机设定转速、设定 扭矩;各个部件的启动停止命 令;车辆工作模式和整车的运 行状况等
来自电机驱动控制单元、 CVT与发动机ECU、电池管 理系统、人机界面的所有 信息
CAN总线原理与实例介绍

行业交流
77
[4] 卢 小 平 , 吴 为 戚 . 现 代 制 造 技 术 [M]. 北 京 :清 华 大 学 出 版 社 . 2003 .
[5] [雷 源 忠 ,雒 建 斌 ,丁 汉 ,等 . 先 进 电 子 制 造 中 的 重 要 科 学 问 题[J].中国科学基金,2002,16(4):204- 209.
表示层
会话层
传输层
网络层
数据链路层 物理层
数据链路层 物理层
图 1 CAN 网络结构
A、物 理 层 规 定 了 CAN 总 线 的 电 平 为 两 种 状 态 :隐 性 (逻辑 1)和显形(逻辑 0)。信号使用差分电压传送,两条 信 号 线 被 称 为“CANH”和“CANL”,静 态 时 均 是 2.5V 左 右 ,此 时 状 态 表 示 为 逻 辑“1”,也 可 以 叫 做“ 隐 性 ”。 用 CANH 比 CANL 高 表 示 逻 辑“0”,称 为“ 显 形 ”,此 时 ,通 常 电压值为:CANH = 3.5V 和 CANL = 1.5V 。 如 图 2 所 示 , CAN 驱动芯片具有成对的 晶 体 管 T1 和 T2, 各 CAN 站 均 无 数 据 发 送 时 ,成 对 晶 体 管 关 闭 ,总 线 处 于“ 隐 性 ”状 态 ,
现代制造技术与装备
2009 第 5 期 总第 192 期
CAN 总线原理与实例介绍
刘康平 林元新
(安徽长 丰扬 子汽 车制造 有限 责任 公司 ,滁州 239064)
摘 要:本文分析了 CAN 总线的工作原理,简要介绍基于 CAN 总线的智能节点的组成。 关键词:CAN 总线 汽车
随 着 汽 车 电 子 技 术 的 不 断 发 展 ,汽 车 上 各 种 电 子 控 制 单元的数目不断增加,连 接 导 线 显 著 增 加 ,因 而 提 高 控 制 单元间通讯可靠性和降低导线成本已成为迫切需要解决 的问题。为此以研发和生产汽车电子产品著称的德国 BOSCH 公 司 开 发 了 CAN 总 线 协 议 ,并 使 其 成 为 国 际 标 准 (ISO11898)。在北美和西欧,CAN 总线协议已经成为汽车 计算机控制系统和嵌入式工业控制局域网的标准总线, 并且拥有以 CAN 为底层协议专为 大型货车和重工机械车 辆设计的 J1939 协议。CAN 总线是一种串行多主站控制器 局域网总线,是一种有效支持分布式控制或实时控制的 串行通讯网络。CAN 总线的通信介质可以是双绞线,同轴 电 缆 或 光 导 纤 维 ,通 信 速 率 可 达 1Mbps/40m,通 信 距 离 可 达 10km/40Kbps。由于其通信速率高,可靠性好以及价格 低廉等特点,使其特别适合中小规模的工业过程监控设 备的互连和交通运载工具电气系统中。 1 网络结构
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(清华大学 汽车工程系, 汽车安全与节能国家重点实验室, 北京 100084)
摘 要: 在研究 CAN 协议的原理及应用技术的基础上, 为 了满足混合动力电动车控制策略的需要, 针对混合动力电动 车的特点, 设计了新的 CAN 总线应用层协议。 该协议对网 络信息进行了分类 并 进 行 了 合 理 的 优 先 权 分 配, 而 且 在 CAN 2. 0B 的基础上重新定义了 ID 场, 实现了广播式和点对 点的通讯。 该协议具有很强的扩展性, 可以兼容 O SEK2NM 和 CCP (CAN Ca lib ra tion P ro toco l) 协议。实验结果表明, 在 应用于混合动力电动车多能源动力总成的控制系统开发时, 该协议具有可靠性高、网络负载小和通讯实时性好的特点。
本文在研究 CAN 2. 0B 标准和 SA E J 1939 的 基础上, 在混合动力电动车多能源动力总成控制系 统的开发过程中, 设计了符合混合动力电动车控制 要求的 CAN 网络应用层协议, 并通过实验验证了 该协议的可靠性和通讯实时性。
1 混合动力电动车控制网络的要求
本文研究的混合动力电动车的控制网络主要由 上位控制器 (HCU )、发动机、电机、电池、无级变速 器和刹车防抱死系统 (AB S) 组成 (图 1)。
10 9 8 7 6 5 4 3 2 1 0 图 3 本文定义的信息格式
在 CAN 2. 0B 的标准数据帧中的 SO F 和 R TR 位在下面的定义中不讨论。11 b it ID 的前 3 b it 是决 定信息的优先权的。 优先权高的 ID 被用于实时性 要求高的控制信息。
接下来的 4 b it 是 PDU (p ro toco l da ta un it) 格 式和信息传送的目标地址。当其取值为 Eh~ Fh 时, 表示该信息为广播式信息。当其取值为 0h~ D h 时, 表示该信息为点对点传送方式, 该 4 b it 为信息的目 标地址。所以, 此协议支持 14 个节点, 对于一般的车 辆控制网络已经足够了。 最后 4 b it 是源地址信息, 合法的取值范围为 0h~ D h。在广播式和点对点传 送方式中都要标明信息的源地址。 混合动力电动车
图 3 为本文定义的信息格式, 主要是对 CAN 2. 0B 的仲裁场进行了重新定义。
CAN 标准帧 S
ID EN T IF IER
R
格式 O F
11 b it
T R
S 本协议格式 O 优先权
F
PDU 格式 (PF )
目标地址
(DA )
R
源地址 (SA )
T R
11 b it ID 位置
21032103210
HCU 接收各 ECU 的工作参数, 根据这些参数 计算出当前经济的工作模式和各 ECU 的目标工作 参数, 并把这些打包成控制命令发送给各 ECU 。各 ECU 根据接收到的工作模式和目标参数, 控制自己 的部件进入指定模式并实现该目标参数。
各 ECU 除了给 HCU 提供工作参数外, 它们之 间也通过 CAN 总线实现数据共享。 因此, HCU 失 效后, 其他 ECU 仍能正常工作。 同时, 该网络应具
董 珂, 等: CAN 总线技术及其在混合动力电动车上的应用
备较强的错误诊断功能, 对错误进行分级, 并采取相 应措施。
图 1 混合动力电动车的控制网络
2 控制网络中的信息分类
CAN 控制网络中的数据是以帧的形式传送的, 一帧数据中的数据场称为信息, 信息是由不同信号 打包而成。
网络中传送的信号可以分为数字信号和模拟信 号。 数字信号将在其值发生明显变化的时候进行传 送, 属 于 事 件 类 信 息, 如 各 种 开 关 信 号 的“合”和 “开”。 根据实际情况, 这种信号一般由 1~ 8 b it 组 成。模拟信号主要是传感器采样模拟信号, 把它转换 为数字量以后的信息, 这种信号有一定的采样周期, 因此传送也是周期性的, 如发动机转速、温度等。 一 般模拟信号由 1~ 8 byte 组成。
Key words: hyb rid electric veh icles; p ro toco l; con t ro l area netw o rk (CAN )
混 合 动 力 电 动 车 ( hyb rid elect ric veh icles, H EV ) 融合了内燃机汽车和电动汽车的优点, 是解 决排污和能源问题最具现实意义的途径之一。 混合 动力电动车需要发动机、电机和电池等部件的协同
另外, 混合动力电动车的控制网络中的信息根 据触发形式的不同可以分为事件型、事件周期型、固 定周期型和条件周期型, 它们的触发条件见表 1。
表 1 CAN 控制网络中的信息分类
传送形式
描述
事件型 事件周期型 固定周期型 条件周期型
当值发生变化时传送 按周期传送, 但当值发生变化时也会传送
始终按一定周期传送 在满足特定条件时按一定周期传送
1132
清 华 大 学 学 报 (自 然 科 学 版)
2003, 43 (8)
类型与优先权等级的关系如表 3 所示。
传送形式
事件型 事件周期型 条件周期型 固定周期型 网络管理
测试 诊断
表 3 信息 ID 编码分类
优先权 ( ID ) 可用 ID 数 十六进制
00x xxxx xxxx
512
00021F F
(D epartm en t of Autom otive Eng ineer ing, Sta te Key Labora tory of Autom otive Safety and Energy,
Tsinghua Un iversity, Be ij ing 100084, Ch ina)
Abstract: A con tro l area netw o rk (CAN ) app lication layer w as designed fo r the con tro l netw o rk of hyb rid electric veh icles (H EV ). M essages in the netw o rk are classified and the p rio rities of m essages are assigned acco rd ing to their classes w ith the redefined ID field of CAN 2. 0B. T he p ro toco l includes destination sp ecific comm un ication s and b roadcast comm un icat ion s. Fu rtherm o re, the p ro toco l is com p lian t w ith O SEK2NM and CCP (CAN calib rat ion p ro toco l). Exp erim en tal resu lts indicate that the CAN con tro l system fo r the H EV pow ertrain is very reliab le and has low netw o rk load and good real2tim e p erfo rm ance.
CAN ID 11 b it
DL C 4 b it 地址场
CAN 数据场 ≤64 b it 控制场 数据场
网络管理信息符合 O SEK 2NM 标准[3], 它的信 息帧结构见图 4。测试信息用于调试, 正常工作时不
使用。诊断信息用于故障诊断, 兼容 CCP 协议[4]。根 据 CCP 协议, 故障诊断器可以读取各 ECU 指定内 存地址的数据, 实现网络的初始化、波特率自适应等 功能。CCP 协议使用的 ID 为 7FE 和 7FF。
1131
S O
11 b it 识别码
RI TD
rD 0L
0~ 8 byte 数据
F
RE C
15+ 1 b it CRC
E 2 b it A CK O
F
帧起始 仲裁场 控制场 数据场 校验场 应答场 帧结束
图 2 标准信息帧格式
3. 2 本协议的信息格式
本文制定的应用层协议在 CAN 2. 0B 11 b it ID (CAN 标准格式) 的基础上定义了新的信息格式。这 是由应用层完成的数据打包。
关键词: 混合动力电动车; 协议; CAN
中图分类号: U 469. 72 文章编号: 100020054 (2003) 0821130204
文献标识码: A
CAN and its appl ica tion for hybr id electr ic veh icles
DONG Ke , L I Ke q ia ng, FENG Ne ngL ia n, J IN D a fe ng, L IAN Xia om in
010 xxxx xxxx
256
20022F F
011 xxxx xxxx
256
30023F F
101 xxxx xxxx
256
40024F F
101 xxxx xxxx
256
50025F F
110 xxxx xxxx
256
60026F F
111 xxxx xxxx
256
70027F F
网络中的周期性信息以 50m s 为一周期。 接收 方收到后给出填充应答信号, 由 CAN 数据链路层 判断是否发送成功。如果发送不成功, 则不重发。事 件性信息需要接收方的应答。 各 ECU 收到事件性 信息后, 延迟时间 (2×本节点地址)m s, 发送应答信 息给 HCU 。如果 HCU 在 50m s 内没有收到应答信 息, 则认为发送失败。不论是由于何种原因导致的事 件性信息发送失败, 发送方都将重发。