基于CAN总线的信息采集系统设计
基于CAN_总线通信技术的家庭空气监测系统的设计与制作

技术应用论点ARGUMENT35基于CAN总线通信技术的家庭空气监测系统的设计与制作文/姜嫚妮随着人们对生活环境质量的日益关注,家庭空气质量监测系统在现代家庭中的应用变得越来越普遍。
为了实时监测和评估家庭空气的质量,本文提出了一种基于CAN总线通信技术的家庭空气监测系统。
一、CAN总线通信技术概述CAN总线通信技术是一种广泛应用于工业控制和汽车电子领域的现场总线通信协议。
CAN总线通信技术采用差分传输方式,具有可靠性高和抗干扰能力强的特点。
与其他通信技术相比,CAN总线通信技术具有更高的带宽和多节点并发通信的能力。
在工业行业中,CAN总线通信技术被广泛应用于汽车电子、机械控制、船舶自动化等领域。
它可以实现数据的实时传输和高精度的时序控制,并能适应复杂环境下的工作要求。
通过CAN总线通信技术,各个设备之间可以进行稳定的数据交换和协调。
由此可见,CAN总线通信技术能够为工业控制系统和汽车电子系统等提供可靠的通信解决方案。
二、家庭空气监测系统需求分析在设计家庭空气监测系统之前,设计人员需要进行需求分析。
一方面,设计人员需要对相关空气质量参数进行监测,如温度、湿度、二氧化碳浓度等。
这些参数可以反映室内空气的质量状况,并帮助用户及时采取相应的措施。
另一方面,设计人员需要明确系统的功能要求和性能指标。
功能要求包括数据实时传输功能、警报功能、数据存储与分析功能等,主要用于满足用户对空气质量监测的需求。
性能指标涉及系统的稳定性、准确性、响应速度等参数,主要用于保证系统的可靠性和灵敏度。
也就是说,选择空气质量参数和明确功能要求,可以为家庭空气监测系统的设计和制作提供清晰的指导。
三、系统设计与硬件选型在明确系统需求后,设计人员需要进行系统设计和硬件选型。
首先,针对主控单元的选择,设计人员需要考虑处理能力、存储容量以及通信接口等因素。
适当选择一款性能强劲且具备足够扩展性的主控单元是确保系统正常运行的关键。
其次,传感器的选择和布局也十分重要。
基于CAN总线技术的主从式通信系统

基于CAN总线技术的主从式通信系统
基于CAN总线技术的主从式通信系统是一种常用的现代工业
通信技术,用于实现工业自动化控制中的数据传输和信息交换。
这种系统由一个主控制器和多个从控制器组成,主控制器控制整个系统的通信过程,而多个从控制器则负责采集和处理数据,并向主控制器发送反馈数据或执行指令。
CAN总线技术是控制领域中的一种通讯协议,它可以实现实
时数据传输和可靠的错误检测,确保信息的高效传输。
这种协议在航空、汽车、电力、机器人等领域广泛应用,使得设备之间的通信更加协调和高效。
主从式通信系统将主控制器和从控制器集成在同一总线中,可以避免相互之间的干扰和冲突。
主控制器可以对整个系统进行控制和调度,从控制器则负责采集和处理实时数据。
在这种分布式系统中,从控制器的作用是根据主控制器的指令进行数据处理,并将调度后的数据再次返回到主控制器,从而实现联动控制。
基于CAN总线技术的主从式通信系统还具有以下优势:
1. 通信速度快:CAN总线技术支持高速传输,可以实现以微
秒为级别的通信速度,处理大量数据时,系统响应速度快。
2. 数据安全可靠:CAN总线技术具有自适应控制、错误检测
和纠错功能,可保证数据传输的准确性和可靠性,并能够防止数据丢失。
3. 灵活配置:主从式通信系统可以根据不同的工业自动化控制需求灵活配置,支持增加或删除节点,可以满足不断变化的自动化控制需求。
4. 易于维护:主从式通信系统采用统一的协议和通信方式,使得维护和更换通信硬件设备更加方便和快捷。
总之,基于CAN总线技术的主从式通信系统是一种高效、便捷和可靠的通信技术,它可以使工业自动化控制的数据传输和信息交换更加顺畅和高效。
海洋维权执法浮标信息采集系统的CAN总线设计
海洋维权执法浮标信息采集系统的CAN总线设计作者:唐原广刘晓王朋朋来源:《现代电子技术》2013年第10期摘要:我国的海上疆土非常的辽阔,海洋开发和海洋探测对于我国经济的发展具有深远的意义。
海洋资料浮标是海洋环境监测与海洋灾害预报的主要手段之一,具有全天候、长期连续、定点监测的特点。
根据海洋维权执法浮标的特点,运用现场总线技术,设计了基于CAN 总线的浮标数据采集系统。
实验表明,CAN总线的应用为海洋维权执法浮标采集系统提供了一种新的采集方式,组成了一套总线化、模块化、高可维护性的系统。
关键词:通信; CAN总线;海洋浮标;数据采集中图分类号: TN911⁃34 文献标识码: A 文章编号: 1004⁃373X(2013)10⁃0031⁃02海洋维权执法浮标基于目前的大型海洋资料型浮标安装高清晰度图像采集系统和声学传感器阵列,定点获取关键海域的舰船信息,获取海洋侵权目标、提升全天候探测能力;分别研制基于浮标卫星和飞机卫星的高速数据实时传输系统,结合目标特征数据库,实现对侵权目标的特征识别和研判;综合集成上述传输技术、探测技术和分析研判技术等,在东海特定敏感区域开展维权执法目标探测识别与信息传输技术集成三位一体的信息综合监视示范应用。
但是,我国目前的海洋资料浮标信息采集系统仍存有许多不足之处:浮标信息采集系统实现对浮标内信息的集成,完成浮标上图像信息、水声信息、水文环境参数信息、浮标体安全参数信息的采集、存储和传输。
数据采集处理系统种类多,给使用和维护带来了极大的不便。
因此为克服传统浮标采集系统的不足,本文将CAN总线应于海洋维权浮标采集系统,主机和通讯机通过CAN总线相连,CAN总线数据通信具有可靠性、实性及灵活性的特点,因此解决了大型海洋浮标数据采集系统的扩展性差的缺点[1]。
浮标系统电气部分分为:电源系统、浮标信息采集系统、水下声阵列信息采集与识别系统、高清图像采集与识别系统、高速卫星通信系统、水文气象传感器和浮标体安全监控传感器。
基于CAN总线的电动轮自卸车运行状态监测系统设计

集也成 为研究 的主要趋势 IJ 4。文 中研究 的 14 5 T交 流 电传 动
电动轮 自卸车主要 由柴 油发动 机、 电机 、 发 电动 轮、 电气 系统 、
液压 系统 、 底盘 和车厢组 成 。整 车 的动力来 自柴 油 发动机 , 与 它同轴的发电机发 出的 电力 , 电气系统控 制供 给电动轮 里的 经
针对 自卸车 中几 个 主要 系统具 备 了成熟 的 电控技 术 和总 线通 信技术 的实 际情况 , 中设 计 的监 测 系统 直接 通 过 C N 文 A
图2
一
程 序 设 计 流 程 图
总线 与电动轮 自卸 车内部控 制器进行通 信 , 来获取 监测 自卸车
运行状 态的参数 。这样 可以在充分利用 现有技术 的基 础上 , 以 最少 的硬件达到 系统 的要求 , 仅节 约 了成本 , 缩短 了 系统 不 也
各个功能模块 以任务线程 的方 式进行调 度 , 样可 以提 高系统 这
的实时性和可维护性 。
态进行实时监测 , 以及时 了解 自卸车及各 部分的工作状况 , 发现
问题 , 从而保证其可靠 、 连续地运行具有 十分重要的意义。
1 14 5 T交流 电传动 电动轮 自卸 车系统组成
11 工 作 原 理 .
o cec n eh ooy,in tn4 10 , hn ;. in tnE eti n fc rn o , t. X a ga 12 1 C ia f i ea dT c n lg X a ga 12 1 C ia2 Xa g l rcMa ua ti gC . L d , in tn4 1 0 , hn ) S n a c u
基于CAN总线的数据采集与控制系统设计

基于CAN总线的数据采集与控制系统设计郝寿朋;刘瑞玲【摘要】In order to ensure real-time and reliable data transmission, solve the problem that the data is prone to be interfered in the process of data transmission, and ensure the capability of the data acquisition and control system, CAN (controller area network) bus is taken as the fieldbus in the system to realize data transmission. CAN is a kind of serial communication network that supports the distributed control and the real time control, and has the characteristics of high performance and high reliability. The repeated tests for the hardware and software of the system demonstrates the capability of the system, and embodies the obvious advantage of CAN bus in the aspects of the communication capability, reliability, real time, and so on.%为了保证数据传输的实时性、可靠性,解决数据传输过程中易受干扰的问题,并保证数据采集和控制系统的性能.采用CAN总线作为现场总线来实现数据传输.经过对系统软硬件在不同环境下的多次测试,验证了该系统的性能,同时也体现了CAN总线在通信能力、可靠性和实时性等方面的明显优势.【期刊名称】《现代电子技术》【年(卷),期】2011(034)008【总页数】4页(P36-38,42)【关键词】CAN总线;数据采集;控制系统;串行通信【作者】郝寿朋;刘瑞玲【作者单位】中国海洋大学,信息科学与工程学院,山东,青岛,266100;临沂市高级技工学校,山东,临沂,276021【正文语种】中文【中图分类】TN911-340 引言随着计算机网络上的高速发展,使得信息的交流与共享变得空前广泛和自如,而这项技术也渗入到自动化领域的变革当中,现场总线(Fieldbus)由此应运而生,开创了工业控制的新篇章。
CAN总线网络设计

1 引言can(controller area network)即控制器局域网络,最初是由德国bosch公司为解决汽车监控系统中的自动化系统集成而设计的数字信号通信协议,属于总线式串行通信网络。
由于can总线自身的特点,其应用领域由汽车行业扩展到过程控制、机械制造、机器人和楼宇自动化等领域,被公认为最有发展前景的现场总线之一。
can总线系统网络拓扑结构采用总线式结构,其结构简单、成本低,并且采用无源抽头连接,系统可靠性高。
本设计在保证系统可靠工作和降低成本的条件下,具有通用性、实时性和可扩展性等持点。
2 系统总体方案设计整个can网络由上位机(上位机也是网络节点)和各网络节点组成(见图1)。
上位机采用工控机或通用计算机,它不仅可以使用普通pc机的丰富软件,而且采用了许多保护措施,保证了安全可靠的运行,工控机特别适合于工业控制环境恶劣条件下的使用。
上位机通过can总线适配卡与各网络节点进行信息交换,负责对整个系统进行监控和给下位机发送各种操作控制命令和设定参数。
网络节点由传感器接口、下位机、can控制器和can收发器组成,通过can收发器与总线相连,接收上位机的设置和命令。
传感器接口把采集到的现场信号经过网络节点处理后,由can收发器经由can总线与上位机进行数据交换,上位机对传感器检测到的现场信号做进一步分析、处理或存储,完成系统的在线检测,计算机分析与控制。
本设计can总线传输介质采用双绞线。
图 1 can总线网络系统结构3 can总线智能网络节点硬件设计本文给出以arm7tdmi内核philips公司的lpc2119芯片作为核心构成的智能节点电路设计。
该智能节点的电路原理图如图2所示。
该智能节点的设计在保证系统可靠工作和降低成本的条件下,具有通用性、实时性和可扩展性等特点,下面分别对电路的各部分做进一步的说明。
图2 can总线智能网络点3.1 lpc2119处理器特点lpc2119是philips公司推出的一款高性价比很处理器。
基于CAN总线星务仿真系统的设计与实现
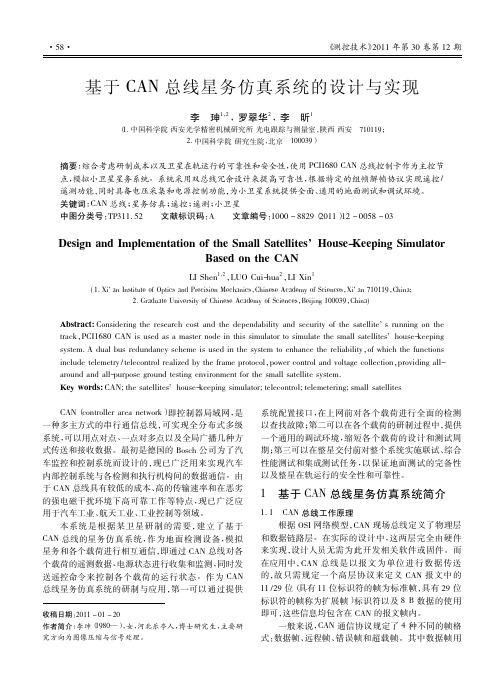
Abstract: Considering the research cost and the dependability and security of the satellite s running on the track,PCI1680 CAN is used as a master node in this simulator to simulate the small satellites housekeeping system. A dual bus redundancy scheme is used in the system to enhance the reliability,of which the functions include telemetry / telecontrol realized by the frame protocol,power control and voltage collection,providing allaround and allpurpose ground testing environment for the small satellite system. Key words: CAN; the satellites housekeeping simulator; telecontrol; telemetering; small satellites CAN ( controller area network ) 即控制器局域网, 是 一种多主方式的串行通信总线, 可实现全分布式多级 系统, 可以用点对点、 一点对多点以及全局广播几种方 式传送和接收数据。最初是德国的 Bosch 公司为了汽 车监控和控制系统而设计的, 现已广泛用来实现汽车 内部控制系统与各检测和执行机构间的数据通信 。由 于 CAN 总线具有较低的成本、 高的传输速率和在恶劣 的强电磁干扰环境下高可靠工作等特点 , 现已广泛应 、 、 用于汽车工业 航天工业 工业控制等领域。 本系 统 是 根 据 某 卫 星 研 制 的 需 要, 建立了基于 CAN 总线的星务仿真系统, 作为地面检测设备, 模拟 星务和各个载荷进行相互通信, 即通过 CAN 总线对各 个载荷的遥测数据、 电源状态进行收集和监测, 同时发 。 送遥控命令来控制各个载荷的运行状态 作为 CAN 总线星务仿真系统的研制与应用, 第一可以通过提供
基于CAN总线技术的智能汽车系统的设计
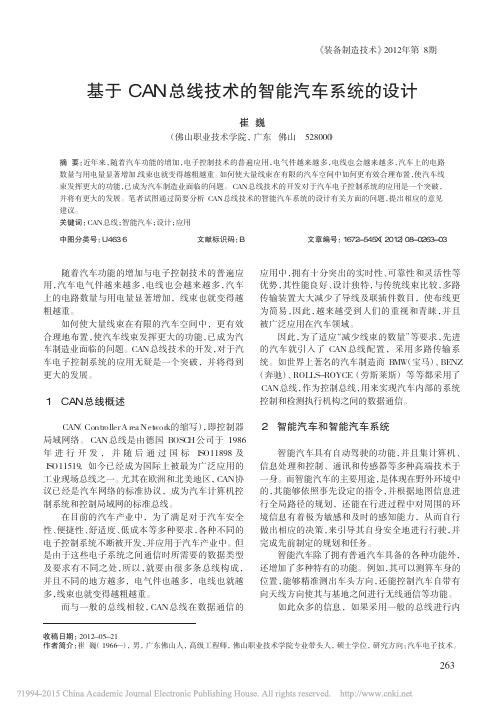
《装备制造技术》2012年第8期随着汽车功能的增加与电子控制技术的普遍应用,汽车电气件越来越多,电线也会越来越多,汽车上的电路数量与用电量显著增加,线束也就变得越粗越重。
如何使大量线束在有限的汽车空间中,更有效合理地布置,使汽车线束发挥更大的功能,已成为汽车制造业面临的问题。
CAN总线技术的开发,对于汽车电子控制系统的应用无疑是一个突破,并将得到更大的发展。
1CAN总线概述CAN(ControllerAreaNetwork的缩写),即控制器局域网络。
CAN总线是由德国BOSCH公司于1986年进行开发,并随后通过国标ISO11898及ISO11519,如今已经成为国际上被最为广泛应用的工业现场总线之一。
尤其在欧洲和北美地区,CAN协议已经是汽车网络的标准协议,成为汽车计算机控制系统和控制局域网的标准总线。
在目前的汽车产业中,为了满足对于汽车安全性、便捷性、舒适度、低成本等多种要求,各种不同的电子控制系统不断被开发,并应用于汽车产业中。
但是由于这些电子系统之间通信时所需要的数据类型及要求有不同之处,所以,就要由很多条总线构成,并且不同的地方越多,电气件也越多,电线也就越多,线束也就变得越粗越重。
而与一般的总线相较,CAN总线在数据通信的应用中,拥有十分突出的实时性、可靠性和灵活性等优势,其性能良好、设计独特,与传统线束比较,多路传输装置大大减少了导线及联插件数目,使布线更为简易,因此,越来越受到人们的重视和青睐,并且被广泛应用在汽车领域。
因此,为了适应“减少线束的数量”等要求,先进的汽车就引入了CAN总线配置,采用多路传输系统。
如世界上著名的汽车制造商BMW(宝马)、BENZ(奔驰)、ROLLS-ROYCE(劳斯莱斯)等等都采用了CAN总线,作为控制总线,用来实现汽车内部的系统控制和检测执行机构之间的数据通信。
2智能汽车和智能汽车系统智能汽车具有自动驾驶的功能,并且集计算机、信息处理和控制、通讯和传感器等多种高端技术于一身。
基于CAN总线的车载智能终端硬件设计
编程 F ah存 储 器 , 用 高 密 度 非 易 失性 存 储 器 技 ls 采
术 制造 , 与工业 8 C 1产 品指 令 和引脚 完全兼 容 。 O5
1 2 2 CAN 控 制 器 的 选 择 . .
S A1 0 是 一 款 独 立 的 C J 00 AN 控 制 器 , 泛 应 广 用 于汽车 和一般 工业 环 境 中 的控 制器 局域 网络 。它
内的节点 数 在理 论上不 受 限制 。另外 , AN 总线 的 C 通 信介 质多样 , 以是 双绞 线 、 可 同轴 电缆 或光 纤 。在
C AN 收 发 器 是 C AN 协 议 控 制 器 和 物理 总线
成本 上 , 基于 C AN 的车 用 总 线 具 有 较 强 的 市 场竞
争力 , 普遍 认为 是 车载 网络 领 域 最 有 发 展 前 途 的 被
之 间 的接 口, 为总 线提 供 差动 的发 送 和接 收功 能 , 是 C AN 系统 中的 必 须 设 备 。该 智 能 终 端 选 用 常用 的
C AN 收 发 器 即 P A8 C 5 C 2 2 0作 为 C AN 控 制 器 S AI 0 J O 0和 C AN 总 线 间 的 接 口, 现 对 总 线 的差 实
摘 要 : 据 车 载 智 能 终 端 的 需 要 , 计 了 基 于控 制 器局 域 网 C 根 设 AN 总 线 的 车 载 智 能 终 端 硬
件 电路 , 并对 信 号 传 输进 行 抗 干 扰 处 理 ; 拟 实验 表 明 所 设 计 的 系统 能 够 正 确 读 取 C N 帧 报 文 信 模 A
随着 汽车工 业 的发展 , 车 变得 越来 越 电子 化 、 汽
智 能化 、 网络化 , 电子 设 备及 线 路越 来 越 多 。该 文拟 设计 基 于控 制 器 局 域 网 C N( o t l rAraN t A C nr l e e— oe w r) ok 总线的汽 车智 能终 端 , 汽 车上 的多路 传感 器 将 信号通 过 C N 总线传 输 到智 能终 端 上 , A 以实 现对 车
CAN总线数据通信系统的设计
封面作者:PanHongliang仅供个人学习CAN总线数据通信系统的设计摘要现场总线是当今自动化领域技术发展的热点之一,被誉为自动化领域的计算机局域网。
它的出现为分布式控制系统实现各节点之间实时、可靠的数据通信提供了强有力的技术支持。
CAN(ControllerArea Network)属于现场总线的范畴,是一种多主方式的串行通讯总线,数据通信实时性强。
与其它现场总线比较而言,CAN总线具有通信速率高、容易实现、可靠性高、性价比高等诸多特点。
本系统要在单片机中实现CAN总线的接口,通过CAN总线,实现两个模块之间的数据通讯。
系统主要由四部分所构成:PC机、微控制器80C51、独立CAN通信控制器SJA1000和CAN总线收发器PCA82C250。
微处理器80C51负责SJA1000的初始化,通过控制SJA1000实现数据的发送和接收等通信任务。
CAN总线节点的软件设计主要包括三大部分:CAN节点初始化、报文发送和报文接收。
本系统通过扩展CAN总线控制器SJA1000,在单片机系统中实现了CAN总线的接口,并且编写了SJA1000的驱动程序,通过读写其的内部寄存器,完成工作方式的设置、接收滤波方式的设置、接收屏蔽寄存器(AMR)和接收代码寄存器(ACR)的设置、波特率参数设置和中断允许寄存器(IER)的设置等基本操作;利用各基本操作,完成了对SJA1000的初始化,并且实现了数据发送和接收。
目录第1章原理与方案31.1设计目的与要求31.2CAN总线介绍31.3设计方案31.3.1 硬件设计方案41.3.2 软件设计方案5第2章硬件连接与说明52.1硬件连接52.1.1 模块使用说明52.1.2 实验箱连线62.2CAN总线控制器SJA100062.3CAN控制器接口PCA82C2506第3章软件流程图及说明错误!未定义书签。
3.1软件流程图73.1.1 主程序流程图73.1.2 初始化子程序流程图73.1.3 发送数据子程序流程图错误!未定义书签。
基于CAN总线的汽车行驶信息处理系统的设计

42 0 ) 4 0 2
设 计 了一种 基 于 C N总 线 的汽 车 行驶 信 息 处 理 系统 。 该 系统 通 过 对 汽 车 行 驶 时 间 、速 度 及 各 个 开 关 量信 A
息进 行 记 录 、存储 ,不仅 能 够 实现 数 据 采 集单 元 和数 据 分 析软 件 之 间的 数 据 采 集 ,还 能根 据 车辆 行 驶 信 息 ,绘 制 出各种 行 驶 曲线 。 系统 采 用 Vsa Bs i l ai u c开发 ,数 据信 息查 询 简 洁快 速 、界 面 美观 、 色调 适 宜 、抗 干扰 能 力 强 、 工作稳 定 可靠 。
关键 词 C N;汽 车行 驶 信 息 处理 系统 ;Vsa B s A i l ai u c
中 图分 类 号
T 27 4 P 7 ; 号
10 7 2 (0 0 1 0 6~ 3 07— 8 0 2 1 )2— 9 0
De i n o h c e Tr v ln n o m a i n Pr c s i g Sy t m s d o t e CAN s sg fa Ve i l a e i g I f r to o e sn se Ba e n h Bu
责任 的鉴 定提供 有力 依据 。
1 系统 简 介
整个 系统分 为 车 载部 分 和 非 车载 的计 算 机部 分 , 结构 示意 图如 图 1 示 。车载部 分装 在车 辆上 ,计算 所 机 部分 的数据 分析 软件 归相关 部 门所 有 。车载 部分 主 要 是 C N节 点和 数据采 集单 元 ,各 个 C N节 点采 集 A A 的时 间 、速 度 、开 关 量 等 信 息 ,通 过 C N 总线 送 到 A 车 载部分 的数 据采 集单元 中存 储 ,然后再 将这 些数 据 通 过数 据 采 集 单元 的 R 2 2串行 接 口或 U B接 口上 S3 S 传 到计算 机 中 ,供 数据分 析处 理系统 进行 分析 ,而 且 数 据分 析处理 系统 还具 有数 据下传 功能 ,即对 车 载部 分 实现初 始化 和参 数设 置 。
汽车ids设计原理
汽车ids设计原理概述汽车IDS(Intrusion Detection System,入侵检测系统)是一种主动安全技术,旨在检测和防止汽车网络系统中的攻击。
随着汽车系统的智能化和互联化程度的不断提高,汽车IDS已成为汽车安全领域中的热门研究方向之一。
本文将介绍汽车IDS的设计原理和实现方法。
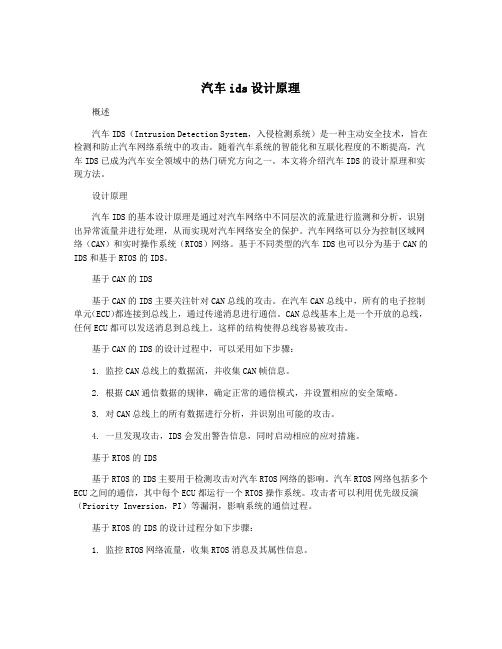
设计原理汽车IDS的基本设计原理是通过对汽车网络中不同层次的流量进行监测和分析,识别出异常流量并进行处理,从而实现对汽车网络安全的保护。
汽车网络可以分为控制区域网络(CAN)和实时操作系统(RTOS)网络。
基于不同类型的汽车IDS也可以分为基于CAN的IDS和基于RTOS的IDS。
基于CAN的IDS基于CAN的IDS主要关注针对CAN总线的攻击。
在汽车CAN总线中,所有的电子控制单元(ECU)都连接到总线上,通过传递消息进行通信。
CAN总线基本上是一个开放的总线,任何ECU都可以发送消息到总线上。
这样的结构使得总线容易被攻击。
基于CAN的IDS的设计过程中,可以采用如下步骤:1. 监控CAN总线上的数据流,并收集CAN帧信息。
2. 根据CAN通信数据的规律,确定正常的通信模式,并设置相应的安全策略。
3. 对CAN总线上的所有数据进行分析,并识别出可能的攻击。
4. 一旦发现攻击,IDS会发出警告信息,同时启动相应的应对措施。
基于RTOS的IDS基于RTOS的IDS主要用于检测攻击对汽车RTOS网络的影响。
汽车RTOS网络包括多个ECU之间的通信,其中每个ECU都运行一个RTOS操作系统。
攻击者可以利用优先级反演(Priority Inversion,PI)等漏洞,影响系统的通信过程。
基于RTOS的IDS的设计过程分如下步骤:1. 监控RTOS网络流量,收集RTOS消息及其属性信息。
2. 根据消息反馈回来的时间延迟和其他信息,确定正常的通信模式,并设置相应的安全策略。
3. 对RTOS网络中的消息进行分析,以便检测不安全的消息和恶意代码。
基于CAN总线的车号信息采集系统的设计
基于CAN总线的车号信息采集系统的设计摘要:简单介绍了基于CAN总线的车号信息采集系统的设计和实现方法,给出了该系统CAN总线的硬件接口电路和软件设计流程。
关键词:CAN总线上位机光耦缓冲区随着科学技术的不断发展,现场对于集中控制多套设备通讯的要求也越来越强烈。
现场总线技术也越来越广泛的应用到工业控制领域来。
本文介绍了基于CAN总线的车号信息采集系统的设计方法,能够对多套采集设备实现数据通讯,此设计不仅充分发挥了现场总线CAN的实时、可靠、高速、远距离、易维护等通信特点,而且将现场总线技术与集中控制技术有机结合。
用户也可以在同一个上位机(PC机)上可以远程监控。
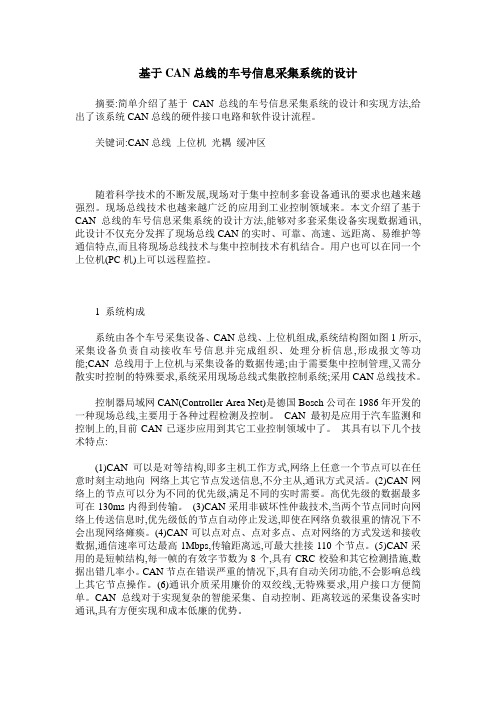
1 系统构成系统由各个车号采集设备、CAN总线、上位机组成,系统结构图如图1所示,采集设备负责自动接收车号信息并完成组织、处理分析信息,形成报文等功能;CAN总线用于上位机与采集设备的数据传递;由于需要集中控制管理,又需分散实时控制的特殊要求,系统采用现场总线式集散控制系统;采用CAN总线技术。
控制器局域网CAN(Controller Area Net)是德国Bosch公司在1986年开发的一种现场总线,主要用于各种过程检测及控制。
CAN最初是应用于汽车监测和控制上的,目前CAN已逐步应用到其它工业控制领域中了。
其具有以下几个技术特点:(1)CAN可以是对等结构,即多主机工作方式,网络上任意一个节点可以在任意时刻主动地向网络上其它节点发送信息,不分主从,通讯方式灵活。
(2)CAN网络上的节点可以分为不同的优先级,满足不同的实时需要。
高优先级的数据最多可在130ms内得到传输。
(3)CAN采用非破坏性仲裁技术,当两个节点同时向网络上传送信息时,优先级低的节点自动停止发送,即使在网络负载很重的情况下不会出现网络瘫痪。
(4)CAN可以点对点、点对多点、点对网络的方式发送和接收数据,通信速率可达最高1Mbps,传输距离远,可最大挂接110个节点。
基于CAN总线的汽车空调压缩机数据采集系统
本文设计了一种基于CAN总线的汽车空调压缩机检测系统,对汽车空调运转时,压缩机部分的电压、电流、高压侧压强、低压侧压强进行采集和实时显示,并建立了相应的数据库系统对所采集的数据进行保存和管理。
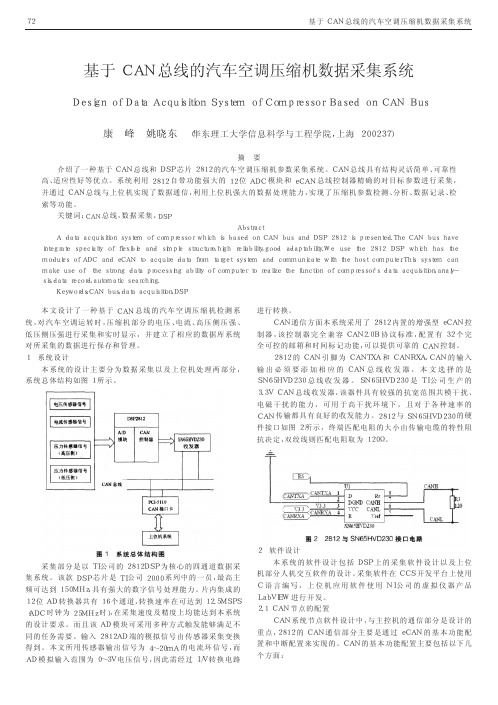
1系统设计本系统的设计主要分为数据采集以及上位机处理两部分,系统总体结构如图1所示。
图1系统总体结构图采集部分是以TI公司的2812DSP为核心的四通道数据采集系统。
该款DSP芯片是TI公司2000系列中的一员,最高主频可达到150MHz,具有强大的数字信号处理能力。
片内集成的12位AD转换器共有16个通道,转换速率在可达到12.5MSPS(ADC时钟为25MHz时),在采集速度及精度上均能达到本系统的设计要求。
而且该AD模块可采用多种方式触发能够满足不同的任务需要。
输入2812AD端的模拟信号由传感器采集变换得到。
本文所用传感器输出信号为4~20mA的电流环信号,而AD模拟输入范围为0~3V电压信号,因此需经过I/V转换电路进行转换。
CAN通信方面本系统采用了2812内置的增强型eCAN控制器,该控制器完全兼容CAN2.0B协议标准,配置有32个完全可控的邮箱和时间标记功能,可以提供可靠的CAN控制。
2812的CAN引脚为CANTXA和CANRXA,CAN的输入输出必须要添加相应的CAN总线收发器,本文选择的是SN65HVD230总线收发器。
SN65HVD230是TI公司生产的3.3VCAN总线收发器,该器件具有较强的抗宽范围共模干扰、电磁干扰的能力,可用于高干扰环境下,且对于各种速率的CAN传输都具有良好的收发能力。
2812与SN65HVD230的硬件接口如图2所示,终端匹配电阻的大小由传输电缆的特性阻抗决定,双绞线则匹配电阻取为120Ω。
图22812与SN65HVD230接口电路2软件设计本系统的软件设计包括DSP上的采集软件设计以及上位机部分人机交互软件的设计。
采集软件在CCS开发平台上使用C语言编写,上位机应用软件使用NI公司的虚拟仪器产品LabVIEW进行开发。
基于CAN总线的转向角传感器采集电路设计

控制场由6位组成,其中4位是数据长度码(DLC3~DLC0),数据长度码代表数据场的字节数,最大为8,允许的数据长度为0~8 B。另外两位是扩展用的保留位,发送的保留位必须为0(显性)。
④数据场
数据场有0~8 B,8 bit/B,一般数据场最大为64 bit,对于复杂的数据,可以用2个或者多个字节来表示,但最多不能超过8 B。
3.1 TLE5012芯片角度测量原理
两个电桥起着重要作用,一个电桥的输出量随着磁场与芯片X方向的夹角x的变化而变化(称作X桥),而另一个电桥的输出量随着磁场与芯片Y方向的夹角?兹y的变化而变化(称作Y桥)[3],。
由图4可知,X桥与Y桥的输出量与磁场的角度变化有关,当磁场方向与芯片X桥方向的夹角为?渍时,X桥的最终输出信号为:
1 CAN总线技术特点
1.1 CAN总线原理介绍
CAN总线是一种串行通信协议,在汽车上应用广泛,可以分为以下3个专门的系统:
(1)动力CAN总线,其数据传输速度最高,达到500 kb/s,主要用于发动机、变速器、ESP等汽车动力系统的数据传输。
(2)舒适CAN总线,其数据传输速度较低,为100 kb/s,主要用于汽车空调系统、车窗门锁系统、座椅调节系统等。
从动齿轮B、C上分别固定一块相同的永磁体,磁体随着齿轮一起转动,两块永磁体的上方固定两个不动的TLE5012芯片。当主轴转动时,TLE5012芯片就能准确检测到两个从动齿轮所转动的角度。
(2)方向盘转角测量方案设计
一般汽车方向盘的转动范围约为4圈,即±720°左右,但TLE5012芯片测量的转角范围在0°~360°,所以必须使芯片的测量角度与方向盘转角对应起来。
基于上述要求,选择89C51内核的芯片,该芯片具有造价低、稳定性及功能强、使用寿命长的优点,其指令系统完全兼容传统的单片机系统,但处理速度更快,接口资源非常丰富,包括4个8位I/O数据接口,适用5 V电压等。
基于CAN总线的汽车多功能监测仪

基于CAN总线的汽车多功能监测仪摘要:设计了一个基于CAN总线的汽车多功能监测系统,该系统为运行中的汽车提供了一个数据采集和显示的平台。
系统主要由传感器、CAN总线以及芯片MC9S12XS128组成,CAN总线将传感器采集的信息传递给芯片MC9S12XS128,同时又将芯片MC9S12XS128的处理结果传送给显示器。
驾驶员可以通过该系统看到汽车在行驶过程中的一系列数据,实验表明,基于CAN总线的汽车多功能检测仪性能卓越、可靠性高。
关键词:CAN总线;汽车测速;传感器;数据采集0 引言本系统通过多种传感器采集汽车在行驶中的各种数据,经过数据处理芯片MC9S12XS128处理后通过显示器显示给驾驶员。
系统中的数据通过CAN总线进行传输,这样就可以免除数据传输线冗长,既有节省车内空间又保证了数据的可靠性。
1 CAN总线简介在当前的汽车行业中,由于安全、舒适、方便、低公害、低成本的要求,出现了各种各样的电子控制系统,由于这些系统对通信所用的数据类型以及可靠性的要求有所不同,使得汽车中的电子控制系统由多条总线构成,为解决这一难题德国Bosch公司开发出的面向汽车的CAN 通信协议,这样不但可以减少线束的数量,而且可以通过多个LAN,进行大量数据的高速通信。
CAN 通过ISO11898 及ISO11519 进行了标准化,现在已经发展成为欧洲汽车网络的标准协议。
按照现场总线透明设计和柔性设计的要求来说,CAN总线分为了3个层次:CAN对象层、CAN传输层、CAN物理层[3]。
2 测速原理汽车测速的原理是公式v =r[]t。
假定轮圈的周长为L,在轮圈上安装m个永久磁铁,则测得的里程值最大误差为L/m。
经综合分析,本设计中取m=1。
当轮子每转一圈,通过开关型霍尔元件传感器采集到一个脉冲信号,并输入给处理器,传感器每获取一个脉冲信号即对系统提供一次计数中断。
每次中断代表车轮转动一圈,中断数n与轮圈的周长L的乘积为里程值。
基于CAN总线的锂电池储能监控系统设计与实现
221 数 据 采集 模 块 __
数 据 采 集 模块 主要 完 成 通 信 协 议解 析 、 数据
・
研发 应 用 ・ 鲍 慧 等
基 于 C N 总线 的锂 电池储 能 监控 系 统设 计 与实 现 A
・ 3・ 4
22. 历 史 数 据查 询 .5
P we ytms 2 1 , 4(2 : - . o r se , 0 0 3 2 ) 16 S
统 电能孤 岛运行 或并 网运 行 , 到削 峰填 谷 、 证 起 保
电 网稳 定 的 目的 。
2) 2级服 务 器监控 系统 为锂 电池储 能 监控 第
图 3 信 道 模 型
Fi 3 Chann model g. el
系统 , 主要任务为直接采集储能 系统 B 其 MS和 P S C 的数据 , 下达指令 完成 电池均衡 、 障报警 、 网 并 故 并
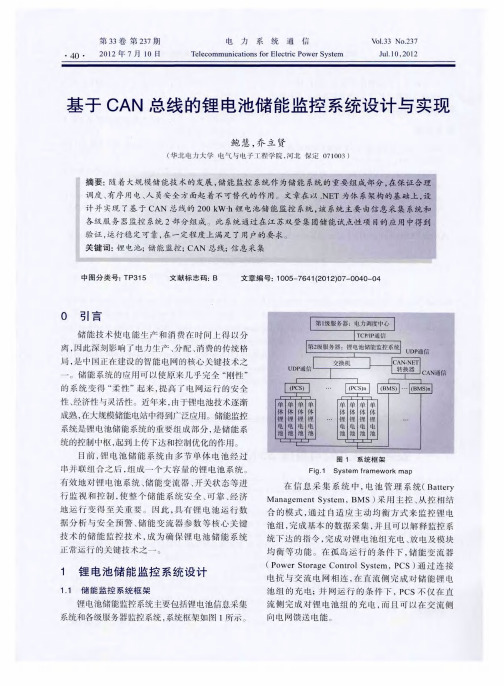
功能 , 以及 与 第 1 服 务 器 电力 调 度 中心通 信 功 级 能 。储 能监控 系统结 构示 意如 图 2所示 。
第 2级服 务器 锂 电池 储能 监 控系 统是 整个 储
能 系统 的控制 中枢 , 有上 传运 行数 据 、 具 下达 控制 指令 的作 用 , 负责 监控 整个储 能 系统 的运 行状 况 。 它 一方 面与 第 1 服 务器 电力 调 度 中心 配 合 , 级 完
与储能监控 系统的通信功 能 。
第 1级服 务器 电力调 度 中心 与第 2级 服 务器 储 能监 控 系 统 之 问采 用 T PI 议 来 完成 上 传 C /P协
下达 的信息 交互功 能 。信 道模 型如 图 3所示 。
电能 的消耗状 况 , 下达 指令 , 理地 调度 储 能 系 合
基于CAN总线的安全巡检系统的信息采集及处理
自 控 s 溯 I , 。 一 、 ~
、
一
, ● , , - , . 了 5 , ‘ , ' ,J, . , , , I I , , ■ ■ , It J ●
一
基 于 CAN 总 线 的 安 全 巡 检 系 统 的 信 息 采 集及处 理
48 ・ 0 22B ・ 2 0 .. 毒普盔善 甘摹 w we wc m. w. . c d o n
维普资讯
自控 s 测 | ,
'
~
\
~
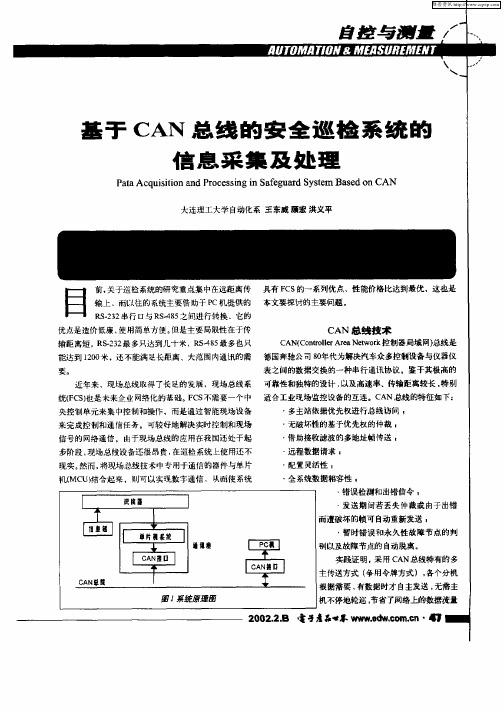
系统通 信软 件设 计 L—— — ‘ 一 —’ — 通 信 软件 分 为 3 部分 :C N初 始 个 A 化 A C N总 线数据 接收 和发送 , 串行 口数
- —J 输上, 而以往的系统主要借助 C机提供的 本文要探讨的主要问题。 千P
r— R .3 串行 1与 R -8 之 间进 行转 换 ,它 的 1 S22 2 1 S4 5
优点是造 价低廉, 使用简单方便。 但是主要局限性在于传
输距 离短 , S2 2 多只达 到几 十米 , S4 5 R .3 最 R -8 最多也 只
统(c ) F s也是 未来企 业 网络化 的基 础 。 C 不需要 一 个 中 适 合工业 现 场监控 设备 的互连 。C N总线 的特征如 下 : FS A
’ 日
伍
删—
讯填矗
L —1 —
. .
・
发 送 期 间若 丢 失 仲截 或 由于 出错
C AN 总 线 技 术
C N C n ol A e Ne ok 制 器局域 网) 线是 A (otlr r r e a t r控 w 总
能达 到 10  ̄ ,还 布能 满足 长距离 、太范 围内通 讯的需 德 国奔驰 公司 8年 代为 解决汽 车众 多控制 设备 与仪 器仪 20 : 0
基于CAN总线的车载交互式信息系统设计
基于CAN总线的车载交互式信息系统设计
沈海斌;卢刚;李声晋
【期刊名称】《机械制造》
【年(卷),期】2010(048)007
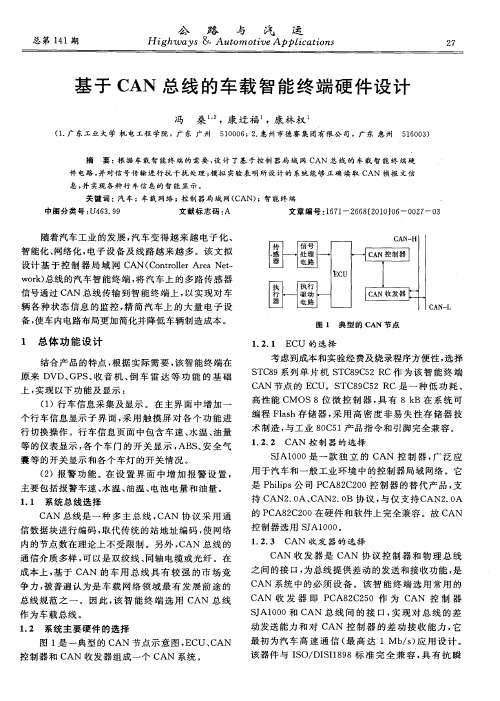
【摘要】车载信息系统是目前研究的一个热点.介绍以TMS320f28335数字信号处理器为控制核心、Blackfin BF536为数字仪表显示器控制器,通过CAN总线网络实现对整车的信息采集和显示,同时带有触摸屏的显示器可以对局部执行单元进行控制.并给出总体和局部的硬件结构图、软件控制流程图.
【总页数】4页(P28-31)
【作者】沈海斌;卢刚;李声晋
【作者单位】西北工业大学,机电学院,西安,710072;西北工业大学,机电学院,西安,710072;西北工业大学,机电学院,西安,710072
【正文语种】中文
【中图分类】TH85;TP212
【相关文献】
1.基于CAN总线的星上交互式仿真框架 [J], 程龙;蔡远文;刘党辉
2.基于IPv6/CDMA的车载信息系统设计 [J], 苏明;魏达;曲良东;王牧男;郐文博
3.基于Cortex-A8的车载信息系统设计 [J], 黄小波;许勇
4.基于DSP和LCD触摸屏的车载信息系统设计 [J], 郭本振;李声晋;卢刚;沈海斌
5.基于VPX标准的车载综合信息系统设计 [J], 卫攸宁; 杨鹏; 张宇; 毛微; 袁佳
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
D E Õ Ö × 8 .GI8AIK57Q Ü ' | ' ( ß 8 .GI
@EQB =
CJH0] KEGQDGX HP EIPHDXGFEHI G0d`E7EFEHI 7^7FAX
!"#$%& '()*+ ,-.*/ 01*"23 %!& 4 5 6 7 8 9 : 6 ; < = '()*+, > -.*/0-.*1234#
!"# 7 8 !"# 7 8 ] 4 - ^ _ ` a b c d " # e f g " # 3 W
X Y Z 'h i B b c d " #j k f 5 , l m N O f g n o 3 P QY Z p qV r ^ s3 t u `a !"# v + wx 5 6 78 3 y z J 4 { 3 Y Z 7 8 | } !"# 7 8 3 P Q Y Z ~ ^ 3 n o f g Y Z n 4 5678 !"# 7 8 *+ E F & * + " # w x * $ P " $ 2 $ & + !"# ¡ ¢ ¡ I £ & ¤ * ¥ ¦ § ¨ ) © ,-*&YZª«3¬® B¯ 9::9 ; : ° ;3<=<;2
!
!"#$%&'(
+ Ô Õ 3 É X ß à á â ¤ Ö 3 ã ä å æ P Q ç ^
| 3 è é ê ¯ × ) ë § P Q 3 ¤ Ö ì X í K ë § Þî 3 78 ï ð ìX ñ 1 òj k Ñ QÒ Ó Ô Õ3 Y Z × ) ó * !"# 78 Ú Û ÜÝ Z Ì¤Ö 2 f gñ K Z ̤ Ö jk 3 ôõ ö õ 9 ÷ø
44E
!"#$%& !"#" $
! Õ Ö × .'+ ? @ >
Ò w Wh ;:: ,6/7 p 8 -.*/0-.* 1234=
.'+ A B C > .GIMNAI (DEOAD Ü ' Ý Þ .'+
B 8 .GI.HIPEQ-HDF Ü '
ìº q í à' î ï z{ · ð èñ ò > M Ü '
-.'3!.!;: > U } ~ .'+< .'+) x M
i h =!: >
-MR>S8>RT.> 7AF-HDFU JHIQ VGIKJA%!&U <'+()W D0OWOAIF"U <'+()W D0OWOAIF=U 7AF-HDFLXHKA Y =U // " Z ==[6EF U # Z !$16EF .'+ IAF\HD] 7AF-HDFLG00.HKA Y :U // MIJ^ *( Y G00.HKA 0GI NG77 FVA
% ] A52E-.I-/9- ?2; & û3 ' r Ó !"# " # $ # ½ þ Nü ^ 3 ?2; ( ) !"# " # $^ þ * 3 p Í P Q +
@A B C ! G , X Q h
&'()*+ ,- )+-,./01),+ 0234)()1),+ (5(1'/ 60('7 ,+ #$% 64(
R"#S !T)%UTVWX Y>#S =W*%8V%
!"#$$% $& '(&$)*+,-$( .(/-(00)-(/1 !#+(/#+- 2+)-,-*0 3(-40)5-,61 !#+(/#+- -HH4EJ1 7#-(+
R0O57Q à ' A F ' ( á
8 .GI.JH7A(DEOAD Ü ' â ã B %?& äåA F @ S A F'(x «¬ ¨ ®'(D Ey ± æ 8 5@. d K Y k çè é ê @S Ü 'ë1z ÕÖ × S ós ô
t 4 AF ¥¦ Só ÍSt @EQB 4 @JH\ 0VGDF HP DA0AEOEIQ 7HPF\GDA NDHQDGX
no ¥ ¦ çè s t ; uv
st = u v = >58?!:@!3#! (8- > A.'+ | '( 456> -.*/0-.*1234# .'+ ? @ABCDE'(AF ¡2q¢Mkl7m£¤ZS
!"# !$%&'$(()' "')* #)&+$', ! " # $ % & ' ( ) *
+ , - . / 0 1 2 " # 3 4 - 5 6 7 8 -. 9 : /. ; < = > ? 012!3 @ A B C D 5 < E F G H I 3 " # J K L M $ N O 3 P Q R S T U V 4 - W X P Q Y Z [ \ !
!"!
%&) *'( + A< @ A 3 A52E-HI-/9- Ó ?2; º ù ú û ü ^
2>5<!1#?@!A1B2 # ± ² U c V !"# t u ³ y C>B 2<1# -D. ´ t u ³ y µ ¶ " 0 · ¸ b -D." ¹ º !"# t u ³ y 9D- G ± » 3 !"# ª « ¼ d ½ p q 99 ¾ ¿
t!
@EQB !
.'ห้องสมุดไป่ตู้ ?@ AB ir t *IFADPG0A 0ED0`EF HP .'+ 6`7
PEJFAD 7AF-HDFLG005G7] Y "_2@@U // (HIF 0GDA 6EF 7AF-HDFL6G`KDGFA Y !U // "=!; ,6/7U =!;" ,6/7U !;"" ,6/7U ? = 56/7 //HNAI NHDF VGIKJA%"& Y .GIMNAI(DEOAD "a : U VGIKJA%#& Y .GIMNAI(DEOAD :a # U .GI.HIPEQ-HDF VGIKJA%:&a b7AF-HDF U .GI.HIPEQ-HDF VGIKJA%=&a b7AF-HDF U //QAF FVA DA0AEOA AOAIF VGIKJA .GIcAFRA0AEOAWOAIF VGIKJA%:&a bD0OWOAIF: U .GIcAFRA0AEOAWOAIF VGIKJA%=&a bD0OWOAIF= U
À -D.0 ¹ V ¬ 3 Á Â 3 - - ª « ¼ d ½ p q -: <=>? -H4HMHEM4J =* ; 4 -H4HHEHNE
* Ñ Q , - ½ 3 ý þ ò j k ¤ * A52E-.I-/9- Ó
?2; ÿ B§ Þ î ì X ! ¾ 3 PQ U " # G )!"# $
.'+ ?@ A B CD E '(A F G C,H I JK L M NO > .'+ P Q , R S T U V W , / X # 56/7 Y Z [ A \ ] ^
_ 1` a V b c .'+ : d e -.* ? @ f g f 8 ; ? @ : d eh 89'#::: i j AB h 3!.!;: k l 7 m n o > k l Y k p 8 .'+ ? @ 2 q ; .'+ ?@ABirst ! uv ;<Nwxyz{F|e
$6(1.0218 <% $'Z)' &$ 8$([) &T) ')*(&W\) L$\\V%WL*&W$% ]'$6()\ $^ * L)'&*W% &_]) 8*&)((W&)`8 W%^$'\*&W$% *LaVW8W&W$% 8_8&)\X *% W%^$'\*&W$% *LaVW8W&W$% 8_8&)\ Z)8WU% +*8 *LTW)[)Z 6_ V8W%U !"# 6V8D !$\]*'W%U +W&T $&T)' W%^$'\*&W$% *LaVW8W&W$% 8_8&)\8X W% &TW8 8_8&)\ &T) )!"# \$ZV() +TWLT +*8 $% &T) +]])' \*LTW%) &T) A52E-HI-/4-?2; +*8 V8)Z *8 Z*&* 8)%ZW%U \$ZV()X *%Z "?=<#K ;!<7L;!<N/O4!"# W%&)'^*L) L*'Z +TWLT +*8 $% &T) V]])' \*LTW%) W%ZV8&'W*( ])'8$%*( L$\]V&)' +*8 V8)Z *8 Z*&* ')L)W[W%U \$ZV()D "%Z &T) ')L)W[W%U Z*&* +)') T*%Z()Z W% &T) W%ZV8&'W*( ])'8$%*( L$\]V&)'D <& W8 \$') ')(W*6() &$ *LL$\](W8T &T) W%^$'\*&W$% *LaVW8W&W$% *%Z ')*(&W\) \$%W&$'W%UD AT) W%^$'\*&W$% *LaVW8W&W$% 8_8&)\ W8 8&*6() *%Z ')*(&W\) 6_ )b])'W\)%& [)'W^WL*&W$%D 9'5 :,.7(8 !"# 6V8c ;!<7L;!<MN/O4c A52E-HI-/4- ?2;c W%^$'\*&W$% *LaVW8W&W$%c \$%W&$'W%U