第十章系统设计
自动控制原理第10章

所以系统状态完全可观, 但不具有规范形式。对于阶数较高的系统, 设计其状态观测器需要将其转化为可观标准型。
① 检测系统的状态可观性。 系统的可观性矩阵Qg及其秩为
② 确定变换矩阵T。 根据第九章化可观标准型的方法, 变换矩阵T可确定如下:
其中,
③ 化系统为可观标准型。 引入线性非奇异变换 , 则原系统的可观标准型为
的充分必要条件为受控系统(A, B, C)是状态完全可控的。
证明 重点证明充分性。 由于线性非奇异变换不改变矩阵的特征值, 所以不妨设状态完全可控系统(A,B,C)的系数矩阵已经为可控标准型, 即
其传递函数为
设状态反馈矩阵为K=[kn kn-1 … k1], 于是有
因此, 闭环系统(A-BK, B, C)的传递函数为
由于系统具有可控标准型的形式,所以系统可控,可以任意配置闭环极点。令状态反馈增益矩阵为
要求利用状态反馈把系统的闭环极点配置在-2, -1±j处。
【例 10-1 】 给定系统的传递函数为
解 由给定的传递函数可以写出系统的状态方程:
则经K引入状态反馈后的系统矩阵为
其特征多项式为
|sI-(A-BK)|=s3+(k1+3)s2+(k2+2)s+k3
01
1 输出反馈与状态反馈
02
2 极点配置问题
03
3 状态重构与状态观测器设计
04
4 最优控制问题概论
05
5 MATLAB在线性反馈系统时间域综合中的应用
06
小结
07
习题
第十章 线性反馈系统的时间域综合
10.1 输出反馈与状态反馈
反馈是控制系统设计的主要手段。经典控制理论采用输出作为反馈量,现代控制理论除了输出反馈外,广泛采用状态作为反馈量,这就是状态反馈。状态反馈可以提供更多的补偿信息, 所以可以获得更为优良的控制性能。 考虑n维线性定常系统(没有引入反馈):
自动控制原理第十章非线性控制系统
自动控制原理第十章非线性控制系统非线性控制系统是指系统动态特性不能用线性数学模型表示或者用线性控制方法解决的控制系统。
非线性控制系统是相对于线性控制系统而言的,在现实工程应用中,许多系统经常具有非线性特性,例如液压系统、电力系统、机械系统等。
非线性控制系统的研究对于实现系统的高效控制和稳定运行具有重要意义。
一、非线性控制系统的特点1.非线性特性:非线性控制系统的动态特性往往不能用线性方程或者线性微分方程描述,经常出现非线性现象,如饱和、死区、干扰等。
2.多变量关联:非线性系统动态关系中存在多个变量之间的相互影响,不同变量之间存在复杂的耦合关系,难以分离分析和解决。
3.滞后响应:非线性系统的响应时间较长,且在过渡过程中存在较大的像后现象,不易预测和控制。
4.不确定性:非线性系统通常存在参数变化、外部扰动和测量误差等不确定性因素,会导致系统性能变差,控制效果下降。
二、非线性控制系统的分类1.反馈线性化控制:将非线性系统通过适当的状态反馈、输出反馈或其它形式的反馈转化为线性系统,然后采用线性控制方法进行设计。
2.优化控制:通过建立非线性系统的数学模型,利用优化理论和方法,使系统达到其中一种性能指标最优。
3.自适应控制:根据非线性系统的参数变化和不确定性,设计自适应控制器,实时调整控制参数,以适应系统的动态变化。
4.非线性校正控制:通过建立非线性系统的映射关系,将测量信号进行修正,以减小系统的非线性误差。
5.非线性反馈控制:根据非线性系统的特性,设计合适的反馈控制策略,使得系统稳定。
三、非线性控制系统设计方法1.线性化方法:通过将非线性系统在其中一工作点上线性化,得到局部的线性模型,然后利用线性控制方法进行设计和分析。
2.动态编程方法:采用动态系统优化的方法,建立非线性系统的动态规划模型,通过求解该模型得到系统的最优控制策略。
3.反步控制方法:通过构造适当的反步函数和反步扩散方程,实现系统状态的稳定和输出的跟踪。
机械系统方案设计ppt课件

机械设计课程中所讲授的各种机械零件则是组成机械系统 的基本要素,它们为组成各种不同功能的机械系统而有机地联 系着。
二、机械系统的组成
动力系统
第十章 机械系统的运动方案 及机构的创新设计
第一节 机械系统的设计过程
机械 系统 设计
第二节 机械系统的总体方案设计 第三节 机械执行系统的运动方案设计 第四节 机械传动系统的方案设计 第五节 原动机及其选择
第六节 机构的创新设计
回顾
第一节 机械系统方案设计概论
一、机械、机械系统、系统
1. 机械的概念(回顾)
2. 机械系统设计过程
选题
设初 计期 阶规 段划
设总 计体 阶方 段案
调研 预测
可行性 论证
确定设 计任务
目标 分析
创新 构思
方案 拟定
方案 评价
方案 决策
选择设计对象,提出设计题目
市场调查:预测销售量及市场占有率 技术调查:预测技术可行性及产品成本 同行调查:预测领先的可能性
论证产品开发的必要性和产品设计、制造、 销售上各项措施实施的可能性
选最优,确认总体设计方案,绘制系统运 动简图,编写总体方案设计计算说明书
调研 报告
论证 报告
设计 任务书
总体方 案示意 图、机 械系统 运动简 图、运 动循环 图、方 案设计 计算说
明书
设结 计构 阶技 段术 设生 计产 阶施 段工
机械系统设计过程(续)
结构 设计
从加工工艺、装配工艺性等因素出发, 设计零部件的结构形式及连接方法
嵌入式系统设计课程大纲

嵌入式系统设计课程大纲第一章:课程介绍(100字)本章主要介绍嵌入式系统设计课程的目的、重要性以及学习该课程的基本要求。
通过本章的学习,学生将对嵌入式系统设计的概念有一个明确的认知。
第二章:嵌入式系统基础知识(200字)本章将重点介绍嵌入式系统的基本概念、发展历程以及其在各个领域中的应用。
同时,将深入讲解嵌入式系统设计所需的硬件和软件基础知识,包括单片机、传感器、通信接口等概念和原理。
第三章:嵌入式系统设计流程(250字)本章将详细介绍嵌入式系统设计的流程及其各个环节的具体要求。
包括需求分析、系统设计、软硬件开发、测试调试等阶段,以及各个阶段所需的工具和方法。
第四章:嵌入式系统开发工具和环境(200字)本章将介绍常用的嵌入式系统开发工具和环境,包括集成开发环境(IDE)、仿真器、调试器等。
学生将学习如何选择和使用适合项目需求的工具,并掌握相关的调试技巧。
第五章:嵌入式系统通信协议(150字)本章将介绍嵌入式系统中常用的通信协议,包括串口通信、SPI、I2C、CAN等。
学生将学习各种通信协议的原理、特点以及在实际项目中的应用场景。
第六章:嵌入式系统电源管理(150字)本章将重点介绍嵌入式系统中电源管理的原理和方法。
学生将学习如何有效地管理系统电源,以提高系统的稳定性和节能效果。
第七章:嵌入式系统安全性设计(200字)本章将介绍嵌入式系统安全性设计的重要性以及相关的技术要求。
学生将学习如何设计安全可靠的嵌入式系统,包括访问控制、数据加密等方面的知识。
第八章:嵌入式操作系统(150字)本章将介绍常用的嵌入式操作系统,包括实时操作系统(RTOS)、Linux嵌入式系统等。
学生将学习这些操作系统的原理、特点和适用场景,以及如何进行系统移植和调试。
第九章:嵌入式系统性能优化(200字)本章将讲解如何对嵌入式系统进行性能优化,包括系统响应时间的优化、功耗优化以及资源利用率的提高。
学生将学习相关的优化技术和方法,并通过实践项目进行实际应用。
amesim中文教程第十章进入AMESim的设计开发特征

amesim中文教程第十章进入AMESim的设计开发特征在AMESim中,设计开发特征是指使用AMESim进行系统建模和仿真的一系列功能和工具。
这些特征可以帮助工程师快速准确地进行系统设计和开发,并提供可视化的仿真结果,以评估系统性能和优化设计。
一、信号流程建模AMESim提供了丰富的组件库,其中包括液压、气动、电气、机械和控制等各种组件,可以通过将这些组件连接起来,建立系统的信号流程模型。
用户可以通过简单的拖拽和连接操作,快速构建系统的模型。
二、参数化建模AMESim支持参数化建模,即通过定义和修改各种参数值,实现对系统模型的快速修改和调整。
这样,工程师可以轻松地进行设计优化和性能分析,以找到最佳的系统设计方案。
三、多物理域联合仿真AMESim支持多物理域联合仿真,可以同时考虑液压、气动、电气、机械和控制等多个物理领域,并进行耦合仿真。
这使得工程师能够全面评估系统的整体性能,并深入研究各个物理领域之间的相互影响。
四、模型参数化和分析AMESim提供了丰富的模型参数化和分析功能,可以帮助工程师对系统进行深入分析。
例如,可以通过参数化设置来模拟不同工况下的系统响应,并进行性能分析和验证。
同时,AMESim还提供了灵活的数据可视化和绘制工具,可以生成各种图表和曲线,方便用户对仿真结果进行分析和比较。
五、优化设计和参数调校AMESim支持优化设计和参数调校,可以利用其内嵌的优化算法,对系统进行自动优化和参数调校。
用户只需定义优化目标和约束条件,AMESim会自动最佳设计参数组合,并给出最优解。
这大大提高了工程师的设计效率和优化效果。
六、故障诊断和故障模拟AMESim还提供了故障诊断和故障模拟的功能,可以模拟系统的失效行为,并进行故障诊断和排查。
这使得工程师能够及时发现和解决系统故障,提高系统的可靠性和可用性。
综上所述,AMESim的设计开发特征可以帮助工程师进行系统建模和仿真,快速准确地进行系统设计和开发,并提供可视化的仿真结果,以评估系统性能和优化设计。
电子科技大学微机系统原理与接口第二版课后习题答案chapter10习题解答
“微处理器系统原理与嵌入式系统设计”第十章习题解答10.2 简述以ARM微处理器为核心的最小硬件系统的组成?●ARM微处理器;●电源模块,包括CPU内核和I/O接口电源;●时钟模块,包括系统主时钟和实时时钟;●复位模块,包括系统加电复位、手动复位和内部复位;●存储器模块,包括程序保存存储器和程序运行存储器;●JTAG调试接口模块。
10.4 简述S3C2440A芯片中各模块时钟信号产生及配置的原理。
为降低系统功耗,可时钟信号进行哪些处理?系统复位信号与各时钟信号有什么关系?当系统主时钟送入S3C2440A芯片后,进入其时钟发生模块,由锁相环进行相应的处理,最终得到FCLK,HCLK,PCLK和UCLK四组时钟信号。
其中,FCLK信号主要供给ARM920T内核使用,HCLK主要供给AHB总线、存储器控制器、中断控制器、LCD控制器、DMA控制器和USB主机模块;PCLK主要供给访问APB总线的外设,例如WDT,I2S,I2C,PWM定时器,MMC接口,ADC,UART,GPIO,RTC和SPI模块;UCLK主要提供USB模块需要的48MHz 时钟。
为降低系统功耗,可对时钟信号进行门控管理。
最低功耗情况下,只开启FCLK信号,其他时钟信号关闭;若需对其他外设,只需使能相应总线及外设的时钟信号有效即可。
系统复位信号一般包括加电复位、手动复位和内部复位三类。
其中,加电复位和手动复位信号均来自外部复位电路,内部复位信号一般来自系统内部事务处理(例如看门狗复位等)。
因此,系统对外部复位信号波形有一定的要求,若不能满足要求系统将不能正常工作。
在S3C2440A芯片中,要完成正确的系统复位,在处理电源保持稳定之后,该信号必须至少维持4个FCLK时钟的低电平状态。
10.6 利用S3C2440A的GPIO端口,设计包含8个LED的流水灯电路,每个LED 间隔1S轮流点亮,试画出程序流程图并写出相关程序段。
假设利用S3C2440A芯片的GPIO端口G的第0~7引脚驱动8个LED电路,对应GPIO输出为0时LED灯亮,则相应程序流程图及相应程序段如下所示:GPGCON EQU 0x56000060GPGDAT EQU 0x56000064GPGUP EQU 0x56000068;配置GPGCON寄存器,设置相关引脚为输出功能LDR R0,=GPGCONLDR R1,[R0]BIC R1,R1,#0x0000FFFFORR R1,R1,#0x00005555STR R1,[R0];配置GPGUP寄存器,断开各上拉电阻LDR R0,=GPGUPLDR R1,[R0]ORR R1,R1,#0x00FFSTR R1,[R0];输出驱动数据,点亮对应LED等LDR R2,=GPGDATLDR R3,[R2]BIC R3,R3,#0x00FFORR R3,R3,#0x00FESTR R3,[R2]LDR R0,=0xFFFFFF ;初始计数值BL DELAY ;调用延迟子程序…LDR R2,=GPGDATLDR R3,[R2]BIC R3,R3,#0x00FFORR R3,R3,#0x007FSTR R3,[R2]LDR R0,=0xFFFFFF ;初始计数值BL DELAY ;调用延迟子程序B LOOPSTARDELAYSUB R0,R0,#1CMP R0,#0x0BNE DELAYMOV PC,LR10.7 在上题中,如果要加入一个按键,实现按键按下时流水灯停止流动,按键放开时流水灯正常流转的功能,思考应怎样修改电路和程序?在上题的基础上,添加一个GPIO口作为输入管脚(GPA的GPA[0]),按键按下GPA[0]值为1,否则为零。
嵌入式系统设计 -Ch10_同步序列埠控制器
第十章同步序列埠控制器本章說明同步序列埠控制器(SSPC)的訊號定義,及應用處理器(PXA250和PXA210)對SSPC操控方式。
10.1 概論SSPC是一個全雙工的同步序列介面。
能連接到各種週邊裝置,包括類比數位(A/D)轉換器、聲音及電信編解碼器(Codec)、還有其他使用序列協定傳輸資料的裝置。
SSPC支援的協定有(1)國家半導體Microwire*;(2)德州儀器同步序列協定*(SSP);(3)Motorola序列週邊協定*(SPI)等三種。
SSPC在Master模式下運作(週邊裝置在Slave模式運作),序列位元傳輸率(serial bit rate)可以從7.2KHz到1.84MHz。
序列資料的寬度可從4到16個位元。
SSPC提供傳送FIFO和接收FIFO,每個FIFO深16通道x寬16位元。
接收或傳送資料時,中央處理器(CPU)可用程式化I/O或是DMA突發傳輸(burst)兩種方式,從FIFO寫入或移出資料。
突發傳輸一次般動4或8個half-word 資料。
10.2 訊號說明本節說明SSPC訊號格式。
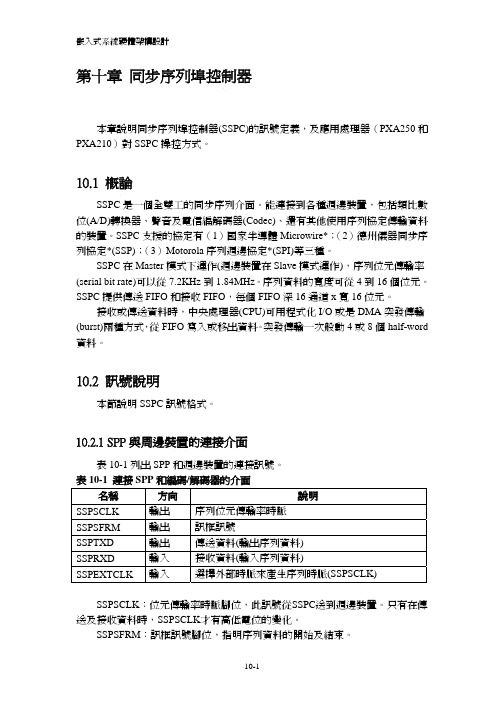
10.2.1 SPP與周邊裝置的連接介面表10-1列出SPP和週邊裝置的連接訊號。
表10-1 連接SPP和編碼/解碼器的介面名稱方向說明SSPSCLK 輸出序列位元傳輸率時脈SSPSFRM 輸出訊框訊號SSPTXD 輸出傳送資料(輸出序列資料)SSPRXD 輸入接收資料(輸入序列資料)SSPEXTCLK 輸入選擇外部時脈來產生序列時脈(SSPSCLK)SSPSCLK:位元傳輸率時脈腳位,此訊號從SSPC送到週邊裝置。
只有在傳送及接收資料時,SSPSCLK才有高低電位的變化。
SSPSFRM:訊框訊號腳位,指明序列資料的開始及結束。
SSPTXD/SSPRXD:傳送/接收序列資料的腳位。
SSPEXTCLK:外部時脈腳位,如果不使用內部時脈時(SSPSCLK)時,可從GPIO 27輸入一個外部時脈(SSPEXTCLK)。
自动控制原理胡寿松著科学出版社课后答案
自动控制原理 (胡寿松著) 科学出版社课后答案《自动控制原理》是胡寿松编著的一本关于自动控制原理的教材。
本书系统地介绍了自动控制的基本原理、方法和技术,适用于自动化、电气、机械等相关专业的本科生和研究生学习使用。
本书一共分为十一章,包括控制系统基础、传递函数与系统的时域特性、系统的频域特性、稳定性分析、根轨迹法、频率响应法、校正器设计、状态空间法、观测器设计、控制系统设计以及非线性系统控制等内容。
每一章都有相应的习题,用于检测学生对所学知识的掌握情况。
第一章:控制系统基础1. 控制系统的定义和分类。
控制系统是指通过对被控对象进行测量和判断,从而对被控对象进行控制的一种系统。
根据被控对象的特性和控制方式的不同,控制系统可以分为连续控制系统和离散控制系统。
2. 控制系统的基本组成。
控制系统由被控对象、测量元件、判断元件、执行元件和反馈元件组成。
3. 控制系统的基本特性。
控制系统的基本特性包括稳定性、灵敏度、精度和动态性能等。
第二章:传递函数与系统的时域特性1. 传递函数的定义和性质。
传递函数是描述控制系统输入和输出之间关系的函数。
传递函数具有线性性、时不变性和因果性等性质。
2. 系统的时域特性。
系统的时域特性包括阶跃响应、冲击响应和频率响应等。
第三章:系统的频域特性1. 频域特性的概念。
频域特性是指系统对不同频率的输入信号的响应情况。
2. 振荡特性的判据。
系统振荡的判据是极点的实部为零和虚部不为零。
第四章:稳定性分析1. 稳定性的定义。
稳定性是指系统在无穷远时间内对于有限输入的响应趋于有限。
2. 稳定性的判据。
稳定性的判据包括判别函数法、根轨迹法和Nyquist稳定判据等。
第五章:根轨迹法1. 根轨迹的概念和性质。
根轨迹是描述传递函数极点随参数变化而运动轨迹的图形。
2. 根轨迹的绘制方法。
根轨迹的绘制方法包括定性法和定量法。
第六章:频率响应法1. 频率响应的概念和性质。
频率响应是指系统对不同频率的输入信号的响应情况。
2020高中通用技术专题练习PDF可编辑系统与设计
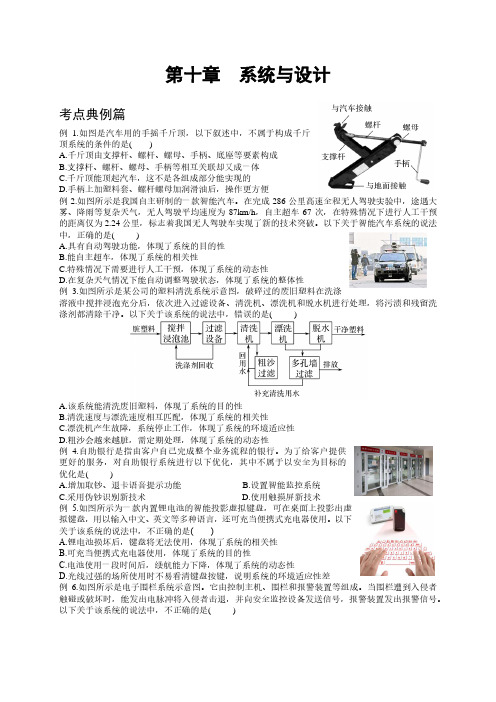
第十章系统与设计考点典例篇例1.如图是汽车用的手摇千斤顶,以下叙述中,不属于构成千斤顶系统的条件的是()A.千斤顶由支撑杆、螺杆、螺母、手柄、底座等要素构成B.支撑杆、螺杆、螺母、手柄等相互关联却又成一体C.千斤顶能顶起汽车,这不是各组成部分能实现的D.手柄上加塑料套、螺杆螺母加润滑油后,操作更方便例2.如图所示是我国自主研制的一款智能汽车。
在完成286公里高速全程无人驾驶实验中,途遇大雾、降雨等复杂天气,无人驾驶平均速度为87km/h,自主超车67次,在特殊情况下进行人工干预的距离仅为2.24公里,标志着我国无人驾驶车实现了新的技术突破。
以下关于智能汽车系统的说法中,正确的是( )A.具有自动驾驶功能,体现了系统的目的性B.能自主超车,体现了系统的相关性C.特殊情况下需要进行人工干预,体现了系统的动态性D.在复杂天气情况下能自动调整驾驶状态,体现了系统的整体性例 3.如图所示是某公司的塑料清洗系统示意图,破碎过的废旧塑料在洗涤溶液中搅拌浸泡充分后,依次进入过滤设备、清洗机、漂洗机和脱水机进行处理,将污渍和残留洗涤剂都清除干净。
以下关于该系统的说法中,错误的是( )A.该系统能清洗废旧塑料,体现了系统的目的性B.清洗速度与漂洗速度相互匹配,体现了系统的相关性C.漂洗机产生故障,系统停止工作,体现了系统的环境适应性D.粗沙会越来越脏,需定期处理,体现了系统的动态性例 4.自助银行是指由客户自己完成整个业务流程的银行。
为了给客户提供更好的服务,对自助银行系统进行以下优化,其中不属于以安全为目标的优化是( )A.增加取钞、退卡语音提示功能B.设置智能监控系统C.采用伪钞识别新技术D.使用触摸屏新技术例 5.如图所示为一款内置锂电池的智能投影虚拟键盘,可在桌面上投影出虚拟键盘,用以输入中文、英文等多种语言,还可充当便携式充电器使用。
以下关于该系统的说法中,不正确的是()A.锂电池损坏后,键盘将无法使用,体现了系统的相关性B.可充当便携式充电器使用,体现了系统的目的性C.电池使用一段时间后,续航能力下降,体现了系统的动态性D.光线过强的场所使用时不易看清键盘按键,说明系统的环境适应性差例6.如图所示是电子围栏系统示意图。
10模具设计-第十章--温度调节系统PPT课件

10 . 1 模具温度及塑料成型温度关系
2)对于粘度高、流动性差的塑料,例如聚碳酸酯、聚砜、 聚甲醛、聚苯醚和氟塑料等,为了提高充型性能,考虑到 成型工艺要求较高的模具温度,必须设置加热装置对模具 进行加热。
3)一般需要用常温水或冷水对模具冷却,而对于高粘流温度 和高熔点的塑料,可用温水进行模温控制。
在模具中设置温度调节系统的目的:
就是要通过控制模具温度,使模塑成型具有良好的产品质
量和较高的生产率。
模具温度的调节是指对模具进行冷却或加热,必要时两者
兼有,从而达到控制模温的目的。
4
10 . 1 模具温度及塑料成型温度关系
注射入模具中的热塑性熔融树脂,必须在模具内冷却固化才 能成为塑件,所以模具温度必须低于模具内熔融树脂的温度, 即达到θg(玻璃化温度)以下的某一温度范围,由于树脂本身 的性能特点不同,不同的塑料要求有不同的模具温度。
3
第十章 温度调节系统
模具温度及其调节的重要性
2.模具温度对成型周期的影响
缩短模塑成型周期就是提高模塑效率。
缩短成型周期关键在于缩短冷却硬化时间,而缩短冷却时 问,可通过调节塑料和模具的温差,在保证制件质量和成 型工艺顺利进行的前提下,降低模具温度有利于缩短冷却 时间,提高生产效率。 缩短成型周期→缩短冷却硬化时间→调节塑料和模具的温差→保证 质量前提下降低模具温度→缩短冷却时间,提高生产效率
4)对于模温要求在90℃以上的,必须对模具加热。 对于流程长、壁厚较小的塑件,或者粘流温度(或熔点)虽 不高但成型面积很大的塑件,为了保证塑料熔体在充模过 程中不至温降太大而影响充型,可设置加热装置对模具进 行预热。 对于小型薄壁塑件,且成型工艺要求模温不太高时,可以 不设置冷却装置而靠自然冷却。
自控所有答案 教材:《现代控制系统》(第八版)谢红卫等译 高等教育出版社,2001.6
目录自动控制原理习题 (2)第一章控制系统导论 (3)第二章控制系统的数学模型 (4)第三章状态空间模型 (6)第四章反馈控制系统的特性 (8)第五章反馈控制系统的性能 (9)第六章反馈控制系统的稳定性 (11)第七章根轨迹法 (12)第八章频率响应方法 (21)第九章频率稳定性 (27)第十章控制系统设计 (32)第十一章非线性系统 (35)第一章 控制系统导论E1.1[解]输出变量:功率输入变量:电流 被测变量:功率 控制装置:微处理器 #P1.7[解]正反馈占优时间误差min 52)334(*12=+=∆T #P1.11[解]利用浮球保持水箱的液面高度,使得滴水孔的流水量均衡,从而使得液面高度与时间成线性关系,保持了水钟的准确度。
#第二章 控制系统的数学模型E2.4[解]108/9508/11)(+-+++=s s s s Y t t e e t y 105089811)(---+=1)(lim )(lim 0===→∞→s sY t y y s t ss#E2.5[解]212211)(c c Ls c c c s T ++=# E2.8[解]3121212121/)(1/)()()(H G s G KG H H G G sG KG s R s Y s T ++++==# E2.26[解]HG G G s D s Y s T 2121)()()(+==# P2.7[解]csR R R R cs R R s V s V s T 21211221()1()()()(+++==# P2.8 [解]8884)()()(22++++==s s s s s V s V s T in out 零极点为:22224j z p ±-=±-=# P2.36[解](a) 12121)1()()()(k s k k s k s R s Y s T +++==(b) 一个正向通道:1,)1(111=∆+=s s k P两个环:)1(,1212211+-=+-=s s k k L s k k L 1)1(1211++++=∆s k k s s k12121111)1()()()(k s k k s k P s R s Y s T +++=∆∆==(c) 令⎩⎨⎧==⎩⎨⎧⇒=+=19.010020110021211k k k k k (d) 略 #第三章 状态空间模型E3.3[解]由已知:⎥⎦⎤⎢⎣⎡+-=⎥⎦⎤⎢⎣⎡---⎥⎦⎤⎢⎣⎡=-11111101001)(s s s A sI状态转移矩阵1111)det()()()(21++⎥⎦⎤⎢⎣⎡-+=--=-=-s s s s A sI A sI adj A sI s φ 令:01)(2=++=s s s p 求得2312,1j s ±-=#E3.11[解]86124)()()(2+++==s s s s R s Y s T 根据状态空间方程⎩⎨⎧+=+=DuCx y Bu Ax x&可得:[]⎥⎦⎤⎢⎣⎡⨯=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡⨯⎥⎦⎤⎢⎣⎡--=⎥⎥⎦⎤⎢⎢⎣⎡••)()(412)()(10)()(6810)()(212121t x t x t y t u t x t x t x t x#P3.1 [解](a) ⎥⎦⎤⎢⎣⎡=c u i x (b) ⎪⎩⎪⎨⎧=++=)(t e u dt diL ri dt du c i c c(c) []⎪⎪⎪⎩⎪⎪⎪⎨⎧⎥⎦⎤⎢⎣⎡⨯=⎥⎥⎦⎤⎢⎢⎣⎡+⎥⎦⎤⎢⎣⎡⨯⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=⎥⎥⎦⎤⎢⎢⎣⎡••)()(10)()(01)()(011)()(t u t i t y t u L t u t i c L L Rt u t i c c c #P3.14[解]2426927)()()(232+++++==s s s s s s R s Y s T根据状态空间方程⎩⎨⎧+=+=DuCx y Bu Ax x&可得:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⨯=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⨯⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡•••)()()(1,7,2)()(100)()()(92624100010)()()(321321321t x t x t x t y t u t x t x t x t x t x t x #第四章 反馈控制系统的特性E4.1[解] (a) 101)()1(100)(112+-=⨯+-⨯+==s ss G s s s G S S S GTG τττττ (b)1013=τ #E4.4[解](a) 0型系统,011,)(lim 0=+=∞==→Kpe s G Kp ss s(b) 对于斜波输入101.0])12(1011[*1*10lim 1*10)(202=⇒=++==→K s s Ks e s s R s ss #P4.8 [解] (a) )1(2006052.0200)(1)()(23++++=+=k s s s ks G s G s T )1(2006052.02006052.02323+++++++=⋅∂∂=k s s s s s s T k k T S T k(b) )1(2006052.0200402006052.0200120020200)()(23232+++++=++++++=k s s s s s s s k s s s D s Y #AP4.8略第五章 反馈控制系统的性能E5.2[解](a) 根据题目条件系统开环传函为:)5)(2(100)(++=s s s HG系统闭环传函为:1107100)(1)()(2++=+=s s s HG s HG s T111,10)(lim 0AKp A e s G Kp ss s =+===→(b) >> step([100],[1,7,110])Time (sec)A m p l i t u d esAs s s A s s s Y ⨯++⨯=⨯++==11071101101001107100)(22对比二阶标准系统:%89.32100..%110220711021/=⋅==⇒⎪⎩⎪⎨⎧==--ζζπσξωe O P n#E5.4[解](a) 222443*4*2162166162)(+++=+++=s s s s s s s T (B) sAs R =)(]16616166168[166162)()()(222+++++⨯=+++==s s s s s s A s s s s A s R s T s Y二阶标准系统166162++s s 的单位阶阶跃响应为:)72.07sin(741)(31+-=-t e t y t所以:)21.17sin(06.11()()(8)(311+-⨯=⨯+⨯=-t e A t y A dtt dy A t y t t=0:0.01:3;subplot(2,1,1),step([16], [1,6,16],t), subplot(2,1,2),step([2,16], [1,6,16],t),00.511.5Step ResponseTime (sec)A m p l i t u d e00.511.5Step ResponseTime (sec)A m p l i t u d e#P5.4略 AP5.4略第六章 反馈控制系统的稳定性E6.4[解]ks k s s Ks s T +-++-=)2(3)1()(230)2(3)(23=+-++=k s k s s s p03463210123kk k k s s s s --令首列不变号的:5.10<<k# E6.6[解]0182710)(23=++++=k s s s s p1801025218102710123kk k s s s s +-+令s1列全为0得330270102j s s ±=⇒=+由)33)(33)((182710)(323j s j s s s k s s s s p -++=++++=103=∴s#P6.6[解] 略 #AP6.3[解] 略 #第七章 根轨迹法E7.1[解](a) >> rlocus([1,4,0] ,[1,2,2])Root LocusReal AxisI m a g i n a r y A x i s(b) 02)24()1()(2=++++=s k s k s p令02*)1(*4)24(2=+-+k k 得:309.0=k(c) 对应闭环极点(特征根)为236.12,1-=s(d) 令⎩⎨⎧==⇒⎪⎩⎪⎨⎧=++=+1236.121)24(122ξωξωωn n n kk k调整时间 3.2361*236.144===ns T ζωs>> step(0.309*[1,4,0] ,[1+0.309,2+4*0.309,2])Time (sec)A m p l i t u d e#E7.6[解]>>rlocus([1,20] ,[1,24,144,0])Root LocusReal AxisI m a g i n a r y A x i s使系统产生振荡的根为根轨迹中的分离点以后的根,如图可知:K>16.37#E7.12[解]>>rlocus([1,1] ,[1,4,8,0])Real AxisI m a g i n a r y A x i s-2-1.8-1.6-1.4-1.2-1-0.8-0.6-0.4-0.20当K =10时,63.0,63.369.1,010184)(32,123-=+-==+++=s j s s s s s p⎪⎩⎪⎨⎧====⇒⎩⎨⎧==--%2.23*100.. 2.3754421.0421/ξξπξωξωe O P Ts n n 当K =20时,79.0,79.461.1,020284)(32,123-=+-==+++=s j s s s s s p⎪⎩⎪⎨⎧====⇒⎩⎨⎧==--%8.34*100.. 2.5164318.0521/ξξπξωξωe O P Ts nn #E7.14[解]>>rlocus([1,10] ,[1,5,0])Root LocusReal AxisI m a g i n a r y A x i s-8-6-4-22468(a)分离点:25100502)(2,12±-=⇒=++=s s s dss dp (b)由 010)5()(2=+++=k s k s s p 可得5215210=⇒⎪⎪⎩⎪⎪⎨⎧=+==k K K n n ξξωω (c) 05010)(,52=++==s s s p k 闭环传函的极点为:552,1j s ±-= #E7.20[解]>> rlocus([1,1] ,[1 3 -4 0])Root LocusReal AxisI m a g i n a r y A x i s-10-8-6-4-20246810System: sys Gain: 15.9P ole: -0.677 + 3.03i Damping: 0.218Overshoot (%): 49.6Frequency (rad/sec): 3.11(a) 由Routh 判据的K>6(b) 使复根稳定的最大阻尼比为218.0=ζ#P7.1[解](a) rlocus([1] ,[1 2,1,0])(b) rlocus([1] ,[1,4,6,4])Real AxisI m a g n a r y A x sReal AxisI m a g n a r y A x s(c) rlocus([1,5] ,[1,5,4,0])(d) rlocus([1,4,8] ,[1,4,0,0])Real AxisI m a g n a r y A xsReal AxisI m a g i n a r y A x i s# P7.3[解]>> rlocus([1] ,[1,7,10,0])Root LocusReal AxisI m a g i n a r y A x i s#P7.13[解]>> rlocus ([1] ,[1,7,19.84,23.54,0])Root LocusReal AxisI m a g i n a r y A x i s(a)分离点:72.9,1.1052.2368.39214)(123=-=⇒=+++=K s s s s dss dp (b) 45cos 1==-ξθ#AP7.3[解])()10(010)1()(22323=++++⇒=++++=s s p s s ps s p s s p所以等效系统的开环传函为:10)(232+++=s s ss p s G>> rlocus ([1,1,0] ,[1,1,0,10])Root LocusReal AxisI m a g i n a r y A x i s-2-1.5-1-0.50.511.52#第八章 频率响应方法E8.1[解]当K=4时,ωωωω2)1(4)1(4)(22j j j G +-=+=,⎪⎪⎩⎪⎪⎨⎧--=+=-)12()(14)(212ωωωφωωtg G ω G(ω) Φ(ω) 0 4 0 0.5 3.2 -53 1 2 -90 2 0.8 -127 ∞-180>> Gs=tf([4],[1 2 1]);nyquist(Gs)Real AxisI m a g i n a r y A x i s-3-2-1123System: Gs Real: 1.92Imag: -2.56Frequency (rad/sec): 0.5System: Gs Real: 0.00697Imag: -1.99Frequency (rad/sec): 1System: Gs Real: -0.479Imag: -0.646Frequency (rad/sec): 2System: GsReal: -0.479Imag: 0.646Frequency (rad/sec): -2System: Gs Real: 0.0114Imag: 2Frequency (rad/sec): -1System: Gs Real: 1.92Imag: 2.56Frequency (rad/sec): -0.5(注意,极坐标图形仅为Nyquist 图的一半,即上图中的下半部分,ω:0→∞)#E8.3[解]系统的开环频率特性函数:)40)(10()100(300)(+++=ωωωωωj j j j j G令:πωωπωωφ-=---=---40102100)(111tg tg tg得28.28rad/s80040*1014010100)4010()2100(111==⇒-+=-⇒+=+---ωωωωωωωωπωtg tg tg tg tg对应幅值为:-2.5db75.0lg 2075.0403.28300*103.28*3.281003.28300|)(222222800===+++==ωωG #E8.5[解]传递函数)361)(1)(81()as 1.5s)(01()(s bs s s K s G +++++=由Bode 图知:⎪⎪⎪⎩⎪⎪⎪⎨⎧===⇒⎪⎪⎪⎩⎪⎪⎪⎨⎧=====8241412410lg 20241418k b a b k b a ωω#P8.1[解]a>> Gs=tf([1],[0.5 2.5 1]);nyquist(Gs)b>> Gs=tf([0.5,1],[1 0 0]);nyquist(Gs) c>> Gs=tf([1 10],[1 6 10]);nyquist(Gs)Real AxisI m a g i n a r y Ax i sReal AxisI m a g i n a r y A x i sReal AxisI m a g i n a r y A x i s#P8.6[解])121161()15(8.0)(21+++=s s s s s GH ,)5601)(201(2)(2s s ss GH ++=#P8.15[解])]110*5.0*2)10[()125.0(5)(2+++=ss s s s GGs=tf(5,[1/12.5^2,2*0.2/12.5,1,0]);bode(Gs);grid#如图,转折频率为12.5rad/s ,最大误差66.701.1420*)1log 5.12(log 62.2-=+---=∆,取2.0=ξ,所以)]15.12*2.0*2)5.12[(5)(2++=ss s s GP8.17[解]]18*2.0*2)8)[(12()15.0(4)(2++++=ss s s s s G>>Gs=tf([2,4],[1/32,(1/64+1/10),(2+1/20),1,0]);bode(Gs);gridBode DiagramFrequency (rad/sec)M a g n i t u d e (d B )1010101010P h a s e (d e g )#P8.24[解]略#AP8.4[解])15.0)(12.016(16115.01*162.31)(22+++=+++=s s s s s s s GH >>Gs=tf(2,[1 5.2 22.4 32 0]);bode(Gs);grid1010101010P h a s e (d e g )Bode DiagramFrequency (rad/sec)M a g n i t u d e (d B )#第九章 频率稳定性E9.1[解]num=[4/3,4];den =conv([1,0],conv([2,1],[1/49,1/7,1])); Gs=tf(num,den);bode(Gs);gridBode DiagramFrequency (rad/sec)1010101010P h a s e (d e g)M a g n i t u d e (d B )#P9.1[解]a) num=[1];den =conv([0.5,1],[2,1]);Gs=tf(num,den);nyquist(Gs);-0.8-0.6-0.4-0.20.20.40.60.8Nyquist DiagramReal AxisI m a g i n a r y A x i sb) num=[0.5,1];den =[1,0,0];Gs=tf(num,den);nyquist(Gs);c)num=[1,10];den =[1,6,10];Gs=tf(num,den);nyquist(Gs);-0.8-0.6-0.4-0.20.20.40.60.8Nyquist DiagramReal AxisI m a g i n a r y A x i sc) num=[30,30*8];den =conv([1,0],conv([1,2],[1,4])); Gs=tf(num,den);nyquist(Gs);Real AxisI m a g n a r y A x s#P9.2[解]1) 像点映射: K=4;num=[K];den =[1,1,4,0]; Gs=tf(num,den);nyquist(Gs);Nyquist DiagramReal AxisI m a g i n a r y A x i s2) 围线与实轴负向的交点为:)4((])4[(1)4()(2222ωωωωωωωωω-++--=++-=jK K j j K j GH 令虚部为零得4=ω,此时,频率特性函数的实部为:4|)](Re[4K j GH -==ωω 所以,K 的最大取值为40<<K #P9.4[解]略#第十章 控制系统设计10.1、已知系统如下所示,)20)(5()(00++=s s s K s G , G 0(s)+-R(s)Y(s)E(s)Gc(s)试设计控制器Gc(s),要求系统在单位阶跃输入下性能指标如下:⎪⎩⎪⎨⎧≤≤≥- %25%7.0121σ超调量:调整时间:误差系数:s t s K s v E10.1[解]1) 绘制未校正系统)20)(5()(00++=s s s K s G 的根轨迹图形: rlocus ([1] ,[1,25,100,0]) ;grid2) 根据给定性能指标,计算理想闭环极点位置3.8771.5194.772.0%25%100..%7.0422,11/2j j s e O P s T n n n n s ±-=-±-=∴⎩⎨⎧==⇒⎪⎩⎪⎨⎧≤⋅==≤=--ζωζωωζσζωζζπ 3) 如图,理想闭环极点极点为根轨迹的左侧,控制器需提供一定的超前相角才能使得闭环后系统满足性能要求,故采用串联超前校正。
多媒体技术及应用第十章

/mmt/
第10章 多媒体应用系统设计 10章 10.2.1多媒体应用系统的开发人员 10.2.1多媒体应用系统的开发人员 1.应用系统组长 应用系统组长 应用系统组长是多媒体应用系统开发的核心, 应用系统组长是多媒体应用系统开发的核心,负责整 个项目的组织和实施,以及其它日常工作,比如做预算、 个项目的组织和实施,以及其它日常工作,比如做预算、安 排进度、召开创作会议、把握组内动态等。组长起着把大家 排进度、召开创作会议、把握组内动态等。 组织、团结在一起的作用。 组织、团结在一起的作用。
第10章 多媒体应用系统设计 10章
(5)软件测试 ) 软件测试就是在软件投入运行之前,对软件需求分析、 软件测试就是在软件投入运行之前,对软件需求分析、 设计规格说明和编码的最终复审, 设计规格说明和编码的最终复审,是软件质量保证的关键步 骤。 在该阶段,需要在测试软件的基础上, 在该阶段,需要在测试软件的基础上,检查软件的各 个组成部分。首先查找各模块在功能和结构上存在的问题并 个组成部分。 加以纠正,其次将已测试过的模块按一定顺序组装起来; 加以纠正,其次将已测试过的模块按一定顺序组装起来;最 后按规定的各项需求,逐项进行确认测试,决定已开发的软 后按规定的各项需求,逐项进行确认测试, 件是否合格,能否交付用户使用。 件是否合格,能否交付用户使用。
/mmt/
第10章 多媒体应用系统设计 10章
(4)程序编码 ) 把软件设计的结果转换成计算机可以接受的程序代码, 把软件设计的结果转换成计算机可以接受的程序代码, 即写成以某种特定程序设计语言表示的源程序。 即写成以某种特定程序设计语言表示的源程序。
/mmt/
/mmt/
第10章 多媒体应用系统设计 10章 原型模型的结构如下图所示。 原型模型的结构如下图所示。
第十章 电子政务系统的建设与管理 《电子政务教程》ppt 课件
第一节 电子政务系统的需求设计
• 一、政府部门进行电子政务需求设计的意 义:
1. 规范政府工作流程 2. 加快政府信息化进程 3. 提高工作人员的素质
• 二、电子政务需求设计的主要过程
• 电子政务需求设计主要包括需求开发和需 求管理两个部分:
1. 需求开发
✓ 需求开发包括需求获取、需求分析、需求 报告编写和需求验证四个阶段。
• 三、电子政务信息系统项目管理的主要内 容:
1. 项目范围的管理 2. 项目风险管理 3. 项目人力资源管理 4. 项目进度管理 5. 项目采购管理与合同管理 6. 项目质量管理 7. 项目建成后的运行管理
第五节 电子政务系统的项目监理
• 一、在电子政务建设中引入项目监理的必 要性:
1. 由电子政务建设和信息化建设的共性决定 2. 电子政务建设的特点也使引入项目监理成
作用 5. 能预测、控制信息化风险,减少信息化建
设过程中的损失
• 三、电子政务项目监理的工作内容
• 电子政务项目监理的工作内容是根据电子 政务工程的生存期而划分的。即可行性研 究与计划、需求分析、概要设计、详细设 计、实现、组装测试、确认测试、使用与 维护这八个阶段。
• 电子政务建设监理的主要内容即沿着这八 个阶段对电子政务建设的质量、进度和投 资进行监督,对项目合同和文档资料进行 管理,协调有关单位间的工作关系。
为必要 3. 在电子政务建设中引入项目监理符合相关
法律法规的要求
• 二、电子政务项目监理的重要作用 1. 发挥咨询和指导作用,弥补业主在人力资
源和经验上的不足 2. 发挥监督与控制作用,更有效地保证工程
的质量、进度和投资 3. 发挥协调作用,保障业主与承建方进行成
海上油气田开发工程仪电讯系统设计指南第十章(电伴热)

第四篇海上油气田开发工程仪电讯系统设计第十章电伴热系统的设计第一节概述第二节电伴热系统电源装置的设计和选型第三节电伴热带的分类和工作原理第四节电伴热带的计算和选型第五节电伴热线的辅助设施第六节不同设计阶段对电伴热系统设计的要求和内容第十章电伴热系统的设计第一节概述海上油气田开发工程的电伴热系统的主要作用是:防止工艺生产设施和生活设施的各种油管线,排污管线,水管线和部分放空管线,阀门和容器等冻结而提供温度的加热和维持温度的系统。
这个温度加热和温度维持的系统主要采用的是电伴热带(线)或电伴热板对上述管线和容器进行加热和保温,所以称之为电伴热系统。
电伴热系统的电伴热带或电伴热板可使管线和容器内的液体在冬天时的温度维持在50C左右或者更高,从而保证液体不冻结,管线不堵塞,不接蜡。
一.电伴热与电加热的区别1.电伴热技术是利用电伴热带或电伴热板接通电源后,将电能变为热能。
在管线或容器的表面来补偿被伴热物体在工艺处理和生产过程中所散失的热量,以维持介质温度在某一范围内。
通常,用于电伴热系统的加热和维持的温度低于1500C。
2.电加热是用电热材料(电阻丝,硅碳棒或管状电加热元件)接通电源后,将电能转变为热能。
它安装在容器或罐体的内部来提高被加热物体在工艺处理和生产过程中所需要的热量,以保证介质温度提高到某一指定值或较小的范围内。
通常,采用电加热器加热的介质温度大约为300~7000C左右。
3.电伴热所需要的电功率通常大大低于电加热器。
4.电伴热在线长度方向均匀放热或大面积上均匀放热,而电加热是在一个点或小面积上高度集中放热。
5.电伴热主要用于对管线,管线上的阀门和容器的防冻,防凝和保温。
电加热器的作用是对容器或罐体内的液体加热,或者对有限空间内的空气加热用来干燥某些物体。
电伴热与传统的蒸汽伴热比较,它简单,方便,若效率高,投资少。
二.电伴热的优点电伴热与传统的蒸汽伴热相比较,主要有以下的优点:1.电伴热装置简单,发热均匀,温度准确,反应快速,可实现远控及遥控,便于实现自动化管理。
第三篇 建筑消防设施 第十章 防烟排烟系统(消防安全技术实务)
第三篇建筑消防设施第十章防烟排烟系统知识框架考点解析考点一:防排烟系统的设置场所根据《建筑设计防火规范》(GB50016)的规定,建筑内的防烟楼梯间及其前室、消防电梯间前室或合用前室、避难走道的前室、避难层(间)应设置防烟设施。
1,民用建筑中应设置排烟设施的有:①设置在一、二、三层且房间建筑面积大于100m2和设置在四层及以上或地下、半地下的歌舞娱乐放映游艺场所。
②中庭。
③公共建筑中建筑面积大于100m2且经常有人停留的地上房间。
④建筑面积大于300m2且可燃物较多的地上房间。
⑤建筑中长度大于20m的疏散走道。
2,工业建筑中应设置排烟设施的有:①人员、可燃物较多的丙类生产场所。
②丙类厂房中建筑面积大于300m2且经常有人停留或可燃物较多的地上房间。
③建筑面积大于5000m2的丁类生产车间。
④占地面积大于1000m2的丙类仓库。
⑤高度大于32m的高层厂(库)房中长度大于20m的疏散走道,其他厂(库)房中长度大于40m的疏散走道。
3,地下、半地下建筑(室)和地上建筑内的无窗房间,当总建筑面积大于200m2或一个房间建筑面积大于50m2,且经常有人停留或可燃物较多时,应设置排烟设施。
考点二:自然通风与自然排姻自然通风与自然排烟是建筑火灾烟气控制中防烟排烟的方式,是经济适用且有效的防排烟方式。
一、自然通风方式(一)自然通风方式的选择对于建筑高度≤50m的公共建筑、工业建筑和建筑高度≤100m的住宅建筑,其防烟楼梯的楼梯间、独立前室、合用前室及消防电梯前室宜采用自然通风方式的防烟系统。
1,当前室或合用前室满足下列相关条件时,楼梯间可不设防烟系统。
①当采用敞开的凹廊、阳台作为防烟楼梯间的前室、合用前室及消防电梯前室时。
②防烟楼梯间前室、合用前室及消防电梯前室具有两个不同朝向的可开启外窗且独立前室两个外窗面积分别不小于2.0m2,合用前室分别不小于3.0m2。
2,当加压送风口设置在独立前室、合用前室及消防电梯前室顶部或正对前室入口的墙面时,楼梯间可采用自然通风系统。
第十章仪表安装与系统设计

➢ 仪表用不中断电源(UPS),可由电气专业设计,自控专业 提出设计条件。由仪表系统成套带来的UPS,由自控专 业设计。
15
第二节 仪表供电系统的设计
❖ 电器选择
➢ 按正常工作条件选择电器设备的额定电压、额 定电流
19
TNC型接地系统
20
TNS型接地系统
21
TNCS型接地系统
22
TT型接地系统
23
IT型接地系统
24
第三节 接地系统的设计
❖ 接地的结构细节
➢ 螺纹孔入口和光孔入口 ➢ 螺纹入口的长度及类型 ➢ 电缆单端接地 ➢ 电源接地、机柜与干净地
25
5
第二节 仪表的安装
6
第二节 仪表供电系统的设计
仪表供电系统的设计内容包括:
➢ 根据生产工艺以及所选用的自动化仪表的具体 特点对供电的安全级别、电源交变类型、电压 等级、用电量和供电质量提出要求。
➢ 根据自动化仪表的具体配置情况进行配电设计。 ➢ 提供相应的电气设备材料表以备订货采购。 ➢ 如果仪表测量管线采用电伴热,还要进行电伴
➢ 供电回路分组 可保证安全可靠的供电 各供电回路简单明了,回路电压单一专用,可以避免 误操作 重要(保安负荷)回路与一般回路,本安回路、联锁回 路与一般回路的各用户主次分明,重点突出
➢ 配电方式 根据用电仪表分布情况与用电负荷的大小,仪表供电可 分为三级供电、二级供电和一级供电3种供电方式。
9
第二节 仪表供电系统的设计
2
第一节 仪表的安装
➢ DCS的安装
DCS的安装,主要是一些机柜、操作台的安装就位,其 安装条件和要求比较严格,一般系统资料中都会有“机 柜、操作台安装就位”文件,用户应严格按要求去作。
第十章基于传递函数模型的控制系统设计
第十章基于传递函数模型的控制系统设计第十章主要介绍了基于传递函数模型的控制系统设计。
传递函数模型是一种常用的用于描述动态系统的数学模型,通过建立传递函数模型可以对系统的动态特性进行分析和设计相应的控制器。
在控制系统设计中,首先需要对待控制的系统进行建模。
利用传递函数模型可以方便地描述系统的输入、输出之间的关系。
传递函数模型可以通过系统的输入-输出关系,即系统的微分方程得到。
一般来说,传递函数模型可以通过使用Laplace变换来表示。
在进行控制系统设计时,首先需要确定系统的性能要求。
性能指标通常包括稳定性、快速性、鲁棒性等。
在基于传递函数模型的控制系统设计中,一般使用PID控制器来实现对系统的控制。
PID控制器包括比例项、积分项和微分项,通过调节这三个部分的参数可以实现对系统的控制。
在进行控制器参数的设计时,可以通过频域分析或者时域分析的方法对系统进行分析。
在频域分析中,可以通过绘制系统的Bode图来分析系统的频率响应,从而设计合适的PID参数。
在时域分析中,可以通过绘制系统的阶跃响应或者脉冲响应来分析系统的动态特性,从而设计合适的PID参数。
在控制系统参数设计完成后,需要进行控制器的调整和优化。
控制器的调整和优化可以通过试错法、根轨迹法、频率响应法等方法来实现。
这些方法可以通过不断地调整和优化控制器参数来实现对系统的最佳控制效果。
在进行控制系统设计时,还需要考虑控制器的实现。
控制器的实现通常是通过安装在数字控制器或者嵌入式控制器上运行的算法来实现的。
通过合适的控制算法和硬件系统,可以实现对系统的准确控制。
在进行基于传递函数模型的控制系统设计时,还需要进行系统的分析和仿真。
通过对控制系统进行仿真可以方便地分析系统的动态特性和控制效果,从而对控制器参数和设计方案进行验证和优化。
综上所述,基于传递函数模型的控制系统设计是一种常用的控制系统设计方法。
通过传递函数模型可以方便地对系统进行建模和分析,通过PID控制器可以实现对系统的控制。
机械实例分析

单击此处添加小标题
根据三角形转子的结构可知,曲轴每转一周即产生一个动力冲程,相对四冲程往复式发动机,曲轴每转两周才产生一个动力冲程,可知旋转式发动机的功率容量比是四冲程往复式发动机的两倍。
单击此处添加小标题
结构设计。旋转式发动机结构简单,只有三角形转子和输出轴两个运动构件。它需要一个化油器和若干火花塞,但无须连杆、活塞以及复杂的阀门控制装置。零件数量比往复式发动机少40%,体积减少50%,重量下降1/2~2/3。
(2) 运动设计。偏心的三角形转子如何将运动和动力输出?在旋转式发动机中采用了内啮合行星齿轮机构,如图所示。
行星齿轮机构
10.1 新型内燃机的开发实例
10.1 新型内燃机的开发实例
单击此处添加小标题
三角形转子相当于行星内齿轮2,它一面绕自身轴线自转,一面绕中心外齿轮1在缸体3内公转,系杆H转子内齿轮与中心外齿轮的齿数比是1.5∶1,这样转子转一周,使曲轴转3周,输出转速较高。
10.3 全自动送筷机创新设计实例
本实例就开发新型全自动送筷机采用的创新思维(新型、实用、快捷)和创新技法(系统分析法、组合创新法、形态分析法、机构构型创新设计法等)作了一些简单的介绍,以期对创新设计有所启发。
1. 设计目的 学生每天到食堂就餐都得从筷筒里胡乱地抓取筷子,这样既不方便又不卫生,因此设计一种自动送筷机具有很大的实用性。如图所示为全自动送筷机外观图。
10.1 新型内燃机的开发实例
1
2
设计目的 本实例就圆柱凸轮加工原理开发中运用综合创新技法、反求创新法,通过创造性的综合和巧妙的构思,使综合体发生质的飞跃,做了简单的说明,从而体现出综合创新是一种更具实用性的创新思路。 圆柱凸轮作为一种机械传动控制部件,具有结构紧凑、工作可靠等突出优点,但其加工制作比较困难。东北大学东软集团生产的医用全身CT扫描机,有一对复杂的圆柱凸轮,过去一直采用手工加工,不仅制造精度低,而且劳动强度大,生产效率低,成本高。为此,负责机械加工的东北大学机械厂提出要研制一种精度较高、操作方便、成本较低的圆柱凸轮加工装置,故于2002年年末,其成立了跨年级的研究小组,开始对这一问题进行研究。经过一年多的时间,完成了圆柱凸轮数控铣削装置的综合创新设计,由东北大学机械厂完成制造,并成功地投入使用,满足了圆柱凸轮加工的精度和生产率的要求 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• 详细设计的目的:在给定的技术架构下,设计系统所有模 块的主要接口与属性、数据结构和算法,指导模块编程。
系统设计方针
• 在每个软件项目的设计阶段,对根据《软件需求规格说明书》设计系统 的整体架构并形成概要设计说明书。 • 对概要设计说明书中的每一项功能,详细分解,确定具体算法及数据结 构(或数据库结构),形成详细设计说明书,为模块编程提供基础。 • 概要设计说明书和详细设计说明书必须通过相关组的审查,相关组包括: 开发组、测试组、质量保证组、配置组、文档组及个人。只有相关组审 批、确认后的概要设计说明书和详细设计说明书,才能作为项目开发计 划以及后续项目工程和管理活动的基础。 • 经过评审确认的概要设计说明书和详细设计说明书任何变更,都应得到 控制和管理,一旦需求发生变更,项目计划、过程活动、工作产品等要 随之变更与需求变更保持一致,填写“配置项变更控制表”,并重新提 交相关组和个人复审。
数据库模式 设计
模块接口设 计 N 过程设计
输入输出界 面设计
概要设计说明书
系 统 概 要 设 计 流 程 图
评审 Y 详细设计 Y 编码测试
系统体系结构设计原则
• 中国科学院的杨叔子院子如是言:
• 文学中有科学,音乐中有数学,漫画中有现代数学的拓扑学。漫画家可以“几 笔”就把一个人画出来,不管怎么美化或丑化,就是活像。为什么?因为那“ 几笔”不是别的,而是拓扑学中的特征不变量,这是事物最本质的东西。 体系结构是指软件系统的基本和主体的形态,也就是软件系统中“最本质”的 东西。一个软件系统的体系结构设计得好不好,可以用“合适性、结构稳定性 、可扩展性、可复用性”这些特征量来评估。
第十章 系统设计
• CMMI中对应实践 • 系统设计简述 • 关于设计模式 • 概要设计活动 • 详细设计活动 • 设计方法简介 • 系统设计实训
技术解决方案——TS
• 系统设计在CMMI中是放到技术解决方案(Technical Solution,简称TS)过程域的,目的为:针对需求进 行设计解决方案,并实现之。 • SG1 Select Product Component Solutions (选择产品组件解决方案),目的是从候选的解决方案 中选择产品或产品组件的解决方案。 • SP1.1 Develop Alternative Solutions and Selection Criteria(开发候选方案和制定选择准则) • SP1.2 Select Product Component Solutions(选择产 品组件方案),选择最能满足已建立的标准的产品组 件候选方案。
•
• 可复用性 :
• 复用就是指“重复利用已经存在的东西”。被复用的对象可以 是有形的物体,也可以是无形的知识财富。复用不是人类懒惰 的表现而是智慧的表现。因为人类总是在继承了前人的成果, 不断加以利用、改进或创新后才会进步。 • 复用的有利于提高产品的质量、提高生产率和降低成本。由经 验可知,通常在一个新系统中,大部分的内容是成熟的,只有 小部分内容是创新的。一般地可以相信成熟的东西总是比较可 靠的(即具有高质量),而大量成熟的工作可以通过复用来快 速实现(即具有高生产率)。勤劳并且聪明的人们应该把大部 分的时间用在小比例的创新工作上,而把小部分的时间用在大 比例的成熟工作中,这样才能把工作做得又快又好。 • 复用的意义很容易理解,人们也乐意复用以前的成果,但是前 提条件是该成果具有比较好的可复用性。可复用性是指成果被 复用的容易程度。 • 可复用性是设计出来的,而不是偶然碰到的。要使体系结构具 有良好的可复用性,设计师应当分析应用域的共性问题,然后 设计出一种通用的体系结构模式,这样的体系结构才可以被复 用。
• •
• 结构稳定性:
• • 当前中国有几句流行的至理名言:“稳定压倒一切”、“发展是硬道理”。发 展的前提条件是稳定,社会如此,开发软件产品也是如此。 体系结构一旦设计完成,应当在一定的时间内保持稳定不变,只有这样才能使 后续工作顺利开展。如果体系结构经常变动,那么建筑在体系结构之上的用户 界面、数据库、模块、数据结构等等也跟着经常变动,用“树倒猢狲散”来比 喻很恰当,这将导致项目发生混乱。 高水平的设计师应当能够分析需求文档,判断出哪些需求是稳定不变的,哪些 需求是可能变动的。于是根据那些稳定不变的需求设计体系结构,而根据那些 可变的需求设计软件的“可扩展性”。
•
• 可扩展性:可扩展性是指软件扩展新功能的容易程度。可扩展性越好,表
示软件适应“变化”的能力越强。可扩展性越来越重要,这是由现代软件 的商业模式决定的:
• • • 社会的商业越发达,需求变化就越快。 现代软件产品通常采用“增量开发模式”,开发商不断地推出软件产品的新版 本,从而不断地获取增值利润。 稳定性和可扩展性之间存在辨证的关系:如果系统不可扩展的话,那么就没有 发展前途,所以不能只关心稳定性而忽视可扩展性;而软件系统“可扩展”的 前提条件是“保持结构稳定”,否则软件难以按计划开发出来,稳定性是使系 统能够持续发展的基础。所以稳定性和可扩展性都是体系结构设计的要素。 如果每次变化都导致体系结构发生大的变动,那简直就是“伤筋动骨”,这样 的体系结构无疑是败笔之作。(例如房屋装修)
材 • Structural Patterns(结构型模式),详见教材 • Behavioral Patterns(行为型模式),详见教 材
建议阅读资料
• 《设计模式-基于C#的工程化实现及扩展》, 王翔,电子工业出版社,2009年。该书需要有 比较深厚的.NET框架基础方能很容易看懂。 • 《Head First设计模式(中文版)》,中国电 力出版社,2007年第一版。
系统体系结构设计
• 系统体系结构设计流程 • 体系结构设计流程:6个步骤 • 《体系结构设计报告》模板见word文档
•
主要工作
• 系统体系结构设计
• 用选定的工具和开发计划设定的交付方式(如小版本渐进交付)及设计 方法,结合设计原则(如功能模块化等),将系统分解为若干子系统、 功能模块,并确定子系统、功能模块及其间的关系; • 确定子系统、功能模块间的约束、假设和依赖(如系统运行环境和开发、 测试环境等,并考虑系统并发性和分布性要求),设定子系统、功能模 块的优先级排序; • 结合以上内容,对系统的模块逻辑实现和集成方法进行设计,降低使软 件难于实现、测试(必要时测试人员参与讨论)、维护因素,形成高内 聚、低耦合的系统体系结构,建议考虑采用三明治或变体实现和集成方 法; • 定义错误处理和恢复策略,对可能出现的故障进行分解,进行优先级排 序并确定处理对策; • 确定项目数据库设计规则以便于系统统一,其中包括:库命名,逻辑设 计,物理设计,安全性设计及优化,管理规则等; • 数据库设计一般要经过“逻辑设计→物理设计→安全性设计→优化”等 步骤,通常要迭代进行。
第十章 系统设计
• CMMI中对应实践 • 系统设计简述 • 关于设计模式 • 概要设计活动 • 详细设计活动 • 设计方法简介 • 系统设计实训
• 系统设计过程划分为两个阶段:概要设计(高层 设计)阶段和详细设计阶段。高层设计阶段的重 点是体系结构设计。详细设计阶段的重点是用 户界面设计、数据库设计、模块设计、数据结 构与算法设计等。
系统设计过程示意图
软件系统与人体的比喻
•
•
•
• •
体系结构如同人的骨架。如果某个家伙的骨架是猴子,那么无论怎样喂养和 美容,这家伙始终都是猴子,不会成为人。人的身材大小取决于骨架大小, 天生小个子的人基本上不可能成为威猛的大汉,后天再努力(例如锻炼和吃 喝)也白搭。由此可见,体系结构乃是系统设计的重中之重。 用户界面如同人的外表,最容易让人一见钟情或一见恶心。象人类追求心灵 美和外表美那样,软件系统也追求(内在的)功能强大和(外表的)界面友 好。我们在设计软件时不要沉迷于技术,而要多多思考什么样的界面才能让 用户更加喜欢。 数据库是存储和处理数据用的。人体的数据库是大脑,知识相当于数据,全 存在大脑里。如果脑子里存储的知识很多,那么这个人就显得博学。如果脑 子处理知识的速度很高,那么这个人就显得聪明。数据库设计的主要挑战是 “高速处理大容量的数据”。 模块如同人的器官。每个器官都具有特定的功能,器官们依附在骨架上。模 块是软件系统的部件,它们安插在体系结构上(否则运行起来掉光光了)。 在设计模块时要重视功能独立性,还要追求“高内聚、低耦合” 。 数据结构与算法如同人的神经和肌肉,它分布在全身,让器官具有生命并能 发挥功能。人之所以能够全身运动,那是无数的神经和肌肉在起作用。如果 局部的神经和肌肉失效了,那么会导致对应的器官残废。如果全局的神经和 肌肉失效了,那么人就瘫痪了。同理,数据结构与算法也有全局和局部之分 ,都要慎重设计。
•
• 合适性:即体系结构是否适合于软件的“功能性需求”和“非功能性需求 ”。
• 设计师可以充分发挥主观能动性,根据需求的特征,通过推理和归纳的方法设 计出合适的体系结构。经验不丰富的设计师往往把注意力集中在“功能性需求 ”而疏忽了“非功能性需求”,殊不知后者恰恰是最能体现设计水平的地方。 高水平的设计师高就高在“设计出恰好满足客户需求的软件,并且使开发方和 客户方获取最大的利益,而不是不惜代价设计出最先进的软件。 对于软件系统而言,能够满足需求的设计方案可能有很多种,究竟该选哪一种 ?此时商业目标是决策依据,即选择能够为开发方和客户方带来最大利益的那 个设计方案。大部分软件开发人员天生有使用新技术的倾向,而这种倾向对开 发商业产品而言可能是不利的,切记切记。
第十章 系统设计
• CMMI中对应实践 • 系统设计简述 • 关于设计模式 • 概要设计活动 • 详细设计活动 • 设计方法简介 • 系统设计实训
于设计模式
设计模式的应用价值在于它能 • 设计模式是一套被反复使用、多数人知晓的、经 帮助人们简便地复用以前成功 过分类编目的、代码设计经验的总结。 的设计方案。设计模式不是凭 空产生的,只有对应用域问题 • 使用设计模式是为了可重用代码、让代码更容易 及其解决方案进行抽象和分析, 被他人理解、保证代码可靠性。 发现本质,并按照一定的格式 • 设计模式大类: 记录下来,才能成为可以被人 们复用的设计模式。 • Creational Patterns(构造型模式) ,详见教