Cortex M3汇编程序示例
Cortex-M332位数据操作指令

名字功能带进位加法加法宽加法(可以加位立即数)按位与(原文是逻辑与,有误——译注)算术右移位清零(把一个数按位取反后,与另一个数逻辑与)位段清零位段插入负向比较(把一个数和另一个数地二进制补码比较,并更新标志位)比较两个数并更新标志位计算前导零地数目按位异或逻辑左移逻辑右移乘加乘减把位立即数放到寄存器地底位,高位清加载位立即数到寄存器(其实汇编器会产生——译注)把位立即数放到寄存器地高位,低位不影响移动一个数地补码乘法按位或(原文为逻辑或,有误——译注)把源操作数按位取反后,再执行按位或(原文为逻辑或,有误——译注)位反转(把一个位整数先用进制表达,再旋转度——译注)对一个位整数做按字节反转对一个位整数地高低半字都执行字节反转对一个位整数地低半字执行字节反转,再带符号扩展成位数圆圈右移带进位地逻辑右移一格(最高位用填充,且不影响地值——译注)从一个位整数中提取任意地位段,并且带符号扩展成位整数带符号除法带符号长乘加(两个带符号地位整数相乘得到位地带符号积,再把积加到另一个带符号位整数中)带符号长乘法(两个带符号地位整数相乘得到位地带符号积)带符号地饱和运算带借位地减法减法宽减法,可以减位立即数字节带符号扩展到位数测试是否相等(对两个数执行异或,更新标志但不存储结果)测试(对两个数执行按位与,更新标志但不存储结果)无符号位段提取无符号除法无符号长乘加(两个无符号地位整数相乘得到位地无符号积,再把积加到另一个无符号位整数中)无符号长乘法(两个无符号地位整数相乘得到位地无符号积)无符号饱和操作(但是源操作数是带符号地——译注)字节被无符号扩展到位(高位清——译注)半字被无符号扩展到位(高位清——译注)。
Cortex-M3在MDK下汇编程序分散加载文件出错的解决方法
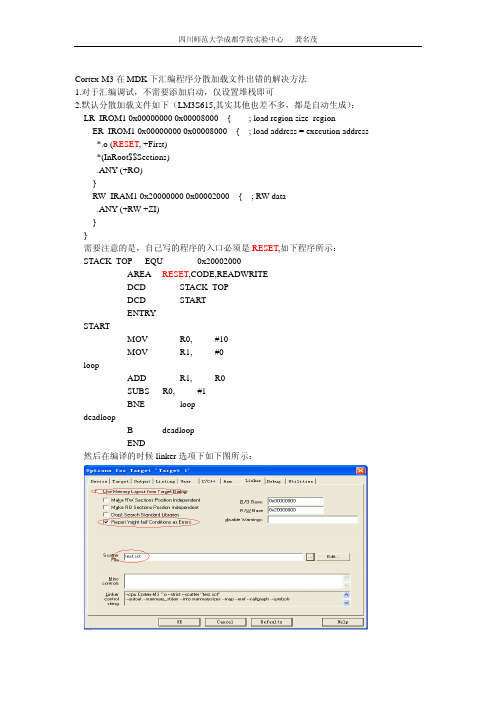
Cortex-M3在MDK下汇编程序分散加载文件出错的解决方法1.对于汇编调试,不需要添加启动,仅设置堆栈即可2.默认分散加载文件如下(LM3S615,其实其他也差不多,都是自动生成):LR_IROM1 0x00000000 0x00008000 { ; load region size_regionER_IROM1 0x00000000 0x00008000 { ; load address = execution address *.o (RESET, +First)*(InRoot$$Sections).ANY (+RO)}RW_IRAM1 0x20000000 0x00002000 { ; RW data.ANY (+RW +ZI)}}需要注意的是,自己写的程序的入口必须是RESET,如下程序所示:STACK_TOP EQU 0x20002000AREA RESET,CODE,READWRITEDCD STACK_TOPDCD STARTENTRYSTARTMOV R0, #10MOV R1, #0loopADD R1, R0SUBS R0,#1BNE loopdeadloopB deadloopEND然后在编译的时候linker选项下如下图所示:编译之后输出结果如下所示:Build target 'Target 1'assembling test.s...linking...test.sct(8): warning: L6314W: No section matches pattern *(InRoot$$Sections).Program Size: Code=24 RO-data=0 RW-data=0 ZI-data=0"test.axf" - 0 Error(s), 1 Warning(s).此时,会出现这个警告。
据网友们说是无关紧要的。
虽然如此,但是看着不爽。
微机原理与嵌入式接口技术课件:Cortex-M3 的指令系统与汇编程序设计

Cortex-m3的指令系统与汇编程序设计
可用的移位操作如下: ·LSL: 逻辑左移, 寄存器中数据位低端空出的位补 0。 ·LSR: 逻辑右移, 寄存器中数据位高端空出的位补 0。 ·ASR: 算术右移, 移位过程中保持符号位不变, 即 若源操作数为正数, 则数据位的高端空出的位补 0, 否则 补 1。 ·ROR: 循环右移(Rotate Right), 从数据位低端移 出的位填入数据位高端空出的位。 ·RRX: 带扩展的循环右移, 操作数右移一位, 高端 空出的位用原 C 标志值填充。
Cortex-m3的指令系统与汇编程序设计 例程 3.4 立即寻址应用示例。
说明: 前缀“#”表示立即数, “0x”表示 16 进制数 值。
从表 3.2 可以看出, ARM 将 32 位指令分为两个部分。
Cortex-m3的指令系统与汇编程序设计
Cortex-m3的指令系统与汇编程序设计
立即数要满足一定的生成规则: 即每个立即数由一个 8 位的常数循环右移偶数位得到,其中循环右移的位数用一个 4 位二进制数的两倍表示。 如果立即数记作<immediate>, 8 位常数记作 immed_8, 4 位的循环右移值记作 rotate_imm, 则有
Thumb-2 技术改善了 Thumb 指令集的性能, 它在原 有的 Thumb 指令的基础上进行了如下的扩充: 增加了一些 新的 16 位 Thumb 指令来改进程序的执行流程, 增加了一 些新的32 位 Thumb 指令以实现一些 ARM 指令的专有功能, 解决了之前 Thumb 指令集不能访问协处理器、 特权指令和 特殊功能指令的局限。 Thumb-2 指令集可以实现所有的功 能, 这样就不需要在 ARM/ Thumb 状态之间反复切换了, 代码密度和性能得到了显著的提高, 但值得注意的是 Thumb-2 并不支持 32 位 ARM 指令集。
Cortex-M3指令小结

Cortex-M3指令小结此附录实际上是从Cortex-M3技术参考手册中译版摘抄并改编的。
并且在可能的情况下,使用类C 语言的风格来讲解指令的功能。
另外要解释的是U8表示unsigned char,无符号16位整数U16表示unsigned short,无符号16位整数S8表示signed char,带符号8位整数S16表示signed short,带符号16位整数缺省情况下,如果使用普通的char和short,都是指带符号整数当借C语言的数组表示法,如Rn[Rm]时,是按整数运算的方式求得Rn+Rm的值,然后把该值当作一个32位地址,再取出该地址的值。
在计算地址时,并不乘以“数据类型所占用的字节数”,这与C语言的数组/指针运算是概念上的不同,切记切记!简单地概括,这里的Rn[Rm]等效于*( (U32 *) (Rn+Rm) ),其中Rn,Rm均为32位整数类型还有两条重要的通用规则:z凡是在指令中有可选的预移位操作的,预移位后的值是中间结果,不写回被移位的寄存器z凡是在{S}的指令中使用了S后缀的,都按照运算结果更新APSR中的标志位。
表1-1 16位Cortex-M3指令汇总操作 汇编指令Rd+= Rm+C ADC <Rd>, <Rm>Rd= Rn+Imm3ADD <Rd>, <Rn>, #<immed_3>Rd+= Imm8ADD <Rd>, #<immed_8>Rd=Rn+Rm ADD <Rd>, <Rn>, <Rm>Rd+=Rm ADD <Rd>, <Rm>Rd=PC+Imm8*4ADD <Rd>, PC, #<immed_8>*4Rd=SP+Imm8*4ADD <Rd>, SP, #<immed_8>*4Rd=SP+Imm7*4 或SP+=Imm7*4ADD <Rd>, SP, #<immed_7>*4或 ADD SP, SP, #<immed_7>*4AND <Rd>, <Rm>Rd &= RmASR <Rd>, <Rm>, #<immed_5> Rd = Rm 算术右移 Imm5Rd 算术右移= Imm5 ASR <Rd>, <Rs>操作汇编指令 按<contd>条件决定是否分支B<cond> <target address> 无条件分支B<tartet address> Rd &= ~RsBIC <Rd>, <Rs> 软件断点BKPT <immed_8> 带链接分支BL <Rm> 比较结果不为零时分支CBNZ <Rn>, <label> CBZ <Rn>, <Rm> 比较结果为零时分支CMN <Rn>, <Rm> 将Rm取二进制补码后再与Rn比较(注意:不是取反)CMP <Rn>, #<immed_8> Rn与 8位立即数比较 ,并根据结果更新标志位的值CMP <Rn>, <Rm> Rn与Rm比较,并根据结果更新标志位的值CMP <Rn>, <Rm> 高寄存器与高或低寄存器比较,并根据结果更新标志位的值。
Cortex-M3汇编实践

Figure 1-21
- 13 -
Cortex-M3 汇编语言实践编程 到这里我们仍然没有解决一个问题,那就是为什么程序会跑飞了呢? CM3 的启动过程 如果想彻底解决程序跑飞的问题我们就需要好好的研究一下 CM3 在启动的时候都做了哪 些事情。 一般来讲芯片启动后都是从 0x00000000 地址处开始执行,然后直接进入系统的 RESET 异 常处理,在 RESET 处理中可能做一些堆栈初始化、寄存器复位等工作,处理完毕之后最终 跳转到 C 语言编写的 main 函数当中执行 C 语言程序。CM3 也不例外,同样是从 0x00000000 地址处开始执行程序,但是它和其他的芯片有一点差别,那就是 Cortex-M3 放 在 0x00000000 地址处的并不是 RESET 的入口地址而是其他的东西,是什么呢?请看下表 (表格出自《Cortex-M3 权威指南》英文版第 40 页):
CORTEX-M3 汇编语言实践 编程
基于 STM32F103 系列 MCU
2015-1-9
三两二锅头 duck8815@
Cortex-M3 汇编语言实践编程
写在前面:
接触 Cortex-M3 已经有一段时间了,大大小小也做了几个项目,可以说对这个系列 的片子有了一定的了解。相对于 8 位单片机来说 CM3 给我的感觉实在是强了太多,其中 比较明显的感觉是存储上的扩充,这让我在编程的时候不必为了节省几十个字节的内存而 大费周章。还记得当初用 ATmega16 写一个项目的时候,申请了一个比较大的缓冲区之后 要好多个模块共用,搞得程序结构非常乱而且还容易出错,当然这还只是一个小惊喜。更 大的优势在于 CM3 先进高效的中断机制以及它丰富的外围接口和强大的片内功能,这些 让我在开发的过程中深切的体会到 CM3 相对于 8 位单片机的优越性。而相对于高端的 ARM 芯片(ARM7、ARM9 等)来讲 CM3 又以它精巧灵活的特性让我深深的喜欢上了这个 系列的芯片,尤其是新的指令集给人感觉耳目一新,让原来繁杂的芯片初始化工作最终浓 缩到数十行汇编代码中,CM3 以它的精简和易用再一次吸引了我。 经过一段时间的学习和使用,个人觉得如果想把一款芯片用的得心应手一些必要的 理论知识还是值得花时间去学习和研究的,所以在工作之余就有了这个文档。本文主要从 汇编语言的角度去阐述和学习 Cortex-M3 的体系结构以及基本工作原理,实现对一些片内 功能的配置与应用同时还包括一些简单的外设应用。本文重点不在于深究汇编指令码,而 是通过使用汇编语言让读者从计算机的角度出发去思考问题,了解计算机的工作原理和步 骤,所以汇编指令码的细节内容在这里则不会深入讨论。
Cortex-M3指令集
举,不过汇编器可能仍然允许这样的语法。
再次重申,这是ARM 公司汇编器的语法,其它汇编器的可能略有区别,
但如果没有给出后缀,汇编器就总是会尽量选择更短的指令。
其实在绝大多数情况下,程序是用C 写的,C 编译器也会尽可能地使用短指
Decrement)基址寄存器Rd的值,时机是在每次访问前(Before)或访问
后(After)。增/减单位:字(4 字节)。例如,记R8=0x8000,则下面两
条指令:
STMIA.W R8!, {r0-R3}
; R8 值变为0x8010,每存一次曾一
次,先存储后自增
STMDB.W R8, {R0-R3}
S: 饱和标志(Saturation),它不做条件转移的依据
16 位数据操作指令
未支持的指令
有若干条Thumb 指令没有被Cortex‐M3 支持,下表列出了没有被支持的指令,
以及不支持的原因。
有少量在ARMv7‐M 中列出的指令不被CM3 支持。其中v7M 允许Thumb2 的
能让程序更易理解。
还可以使用EQU 指示字来定义常数,然后在代码中使用它们,例如:
NVIC_IRQ_SETEN0 EQU 0xE000E100
NVIC_IRQ0_ENABLE EQU 0x1
…
LDR R0, =NVIC_IRQ_SETEN0
;在这里的LDR 是个伪指令,
;它会被汇编器转换成
;一条“相对PC 的加载指令”
;一个32 位的指令,跨越了字的边界
绝大多数 16 位指令只能访问R0‐R7;32 位Thumb‐2 指令则无任何限制。
Cortex-M3汇编实践
-8-
Cortex-M3 汇编语言实践编程 编译、调试程序 接下来我们把刚刚写好的程序进行编译,我们会发现这里有个警告:
Figure 1-12 第一个程序编译警告
双击这个警告会跳出如下内容:
Figure 1-13 警告对应内容
自习查看我们会发现这个以.sct 结尾的文件实际是编译器在编译期生成的一个中间文件, 警告内容说无法匹配*(InRoot$$Sections)这个段,实际上这个段就是编译器在编译期给 C 语 言中的 main 函数定义的一个别名,因为我们没有写.C 文件更没有写 main 函数所以编译器 自然就不能匹配到 main 函数了,这个问题属于编译器的原因造成的,即编译器在编译程 序的时候需要有 main 函数,否则将会报出警告。处理的办法是在工程当中添加一个 C 语 言源文件并写入一个空的 main 函数。
单击途中 1 号位置单击 2 号位选择 obj 目录4 好位置选中创建 HEX 文件
Figure 1-5 配置目标文件输出位置
-3-
Cortex-M3 汇编语言实践编程 按照图中序号顺序完成后续配置
修改部分工程信息,1、2 两处改成自己对应的工程名与组名
Figure 1-6 修改工程信息
-4-
对于上面的这段程序需要详细的解释一下: 1. 正文第 1 行以分号(;)开始,在 ARM 汇编里表示单行注释,ARM 汇编不支持 多行注释。 2. 第三行代码的内容在 ARM 汇编中被称之为伪代码,这行代码的意思是定义一 个段[section],段是汇编语言组织代码的基本单位,功能与 C 语言中的函数类 似,代码写在段的外面也允许,但是会出一些问题。这一行代码中 AREA 伪指 令表示声明一个段,RESET 是段的名字,在当前平台上 RESET 段也是系统默认的 入口,所以在代码中有且只有一个 RESET 段。CODE 表示短的属性,代表当前 段为代码段,和 CODE 功能类似的还有 DATA、STACK、HEAP 等分别表示数据 段、栈和堆。READONLY 是当前段的访问属性表示只读,还有 READWRITE 表示 可读可写。 3. 第 4 行代码只有一个单词 ENTRY,表示程序入口,即 CPU 会从 ENTRY 标记的这 一行代码处开始执行程序,类似与 C 语言中的 main 函数,但是与 C 语言不同 的事 ARM 汇编允许一个程序有多个入口,但是用户需要指定一个入口作为主
Cortex_M3指令集
STR.W R0, [R1], #-12 ;
该指令是把 R0 的值存储到地址R1 处的。在存储完毕后, R1←R1+(‐12).注意,[R1]后面是没有“!”的。可见,在后索引中,基 址寄存器是无条件被更新的——相当于有一个“隐藏”的“!”
PUSH/POP 作为堆栈专用操作,也属于数据传送指令类。
CoProcessor)标志置位)。
改变处理器状态指令(CPS)的一些用法也不再支持。这是因为PSRs 的 定义已经变了,以前在v6 中定义的某些位在CM3 中不存在。
有些提示(hint)指令的功能不支持,它们在CM3 中按“NOP‖指令对待
三、近距离地检视指令
从现在起,我们将介绍一些在ARM 汇编代码中很通用的语法。有些指令 可以带有多种参数,比如预移位操作,但本章并不会讲得面面惧到。
请注意:不同汇编器的指示字和语法都可以不同。上述示例代码都是按 ARM 汇编器的语法格式写的。如果使用其它汇编器,最好看一看它附带的示例 代码。
2.汇编语言:后缀的使用
在 ARM 处理器中,指令可以带有后缀,如表4.1 所示。
在 Cortex‐M3 中,对条件后缀的使用有限制,只有转移指令(B 指令)
CM3 除了支持“预索引”,还支持“后索引”(Post‐indexing)。后
索引也要使用一个立即数offset,但与预索引不同的是,后索引是忠实使 用基址寄存器Rd 的值作为数据传送的地址的。待到数据传送后,再执行
Rd ������
Rd+offset(offset 可以是负数——译注)。如:
后索引
二、指令集
在讲指令之前,先简单地介绍一下Cortex‐M3 中支持的算术与逻辑标
志。本书在后面还会展开论述。它们是:
cortex-m332位数据操作指令
Cortex-M3 32位数据操作指令名字功能ADC 带进位加法ADD 加法ADDW 宽加法(可以加12 位立即数)AND 按位与(原文是逻辑与,有误——译注)ASR 算术右移BIC 位清零(把一个数按位取反后,与另一个数逻辑与)BFC 位段清零BFI 位段插入CMN 负向比较(把一个数和另一个数的二进制补码比较,并更新标志位)CMP 比较两个数并更新标志位CLZ 计算前导零的数目EOR 按位异或LSL 逻辑左移LSR 逻辑右移MLA 乘加MLS 乘减MOVW 把16 位立即数放到寄存器的底16 位,高16 位清0MOV 加载16 位立即数到寄存器(其实汇编器会产生MOVW——译注)MOVT 把16 位立即数放到寄存器的高16 位,低16 位不影响MVN 移动一个数的补码MUL 乘法ORR 按位或(原文为逻辑或,有误——译注)ORN 把源操作数按位取反后,再执行按位或(原文为逻辑或,有误——译注)RBIT 位反转(把一个32 位整数先用2 进制表达,再旋转180 度——译注)REV 对一个32 位整数做按字节反转REVH/REV16对一个32 位整数的高低半字都执行字节反转REVSH 对一个32 位整数的低半字执行字节反转,再带符号扩展成32 位数ROR 圆圈右移RRX 带进位的逻辑右移一格(最高位用C 填充,且不影响C 的值——译注)SFBX 从一个32 位整数中提取任意的位段,并且带符号扩展成32 位整数SDIV 带符号除法SMLAL 带符号长乘加(两个带符号的32 位整数相乘得到64 位的带符号积,再把积加到另一个带符号64 位整数中)SMULL 带符号长乘法(两个带符号的32 位整数相乘得到64 位的带符号积)SSAT 带符号的饱和运算SBC 带借位的减法SUB 减法SUBW 宽减法,可以减12 位立即数SXTB 字节带符号扩展到32 位数TEQ 测试是否相等(对两个数执行异或,更新标志但不存储结果)TST 测试(对两个数执行按位与,更新Z 标志但不存储结果)UBFX 无符号位段提取UDIV 无符号除法UMLAL 无符号长乘加(两个无符号的32 位整数相乘得到64 位的无符号积,再把积加到另一个无符号64 位整数中)UMULL 无符号长乘法(两个无符号的32 位整数相乘得到64 位的无符号积)USAT 无符号饱和操作(但是源操作数是带符号的——译注)UXTB 字节被无符号扩展到32 位(高24 位清0——译注)UXTH 半字被无符号扩展到32 位(高16 位清0——译注)。
m3 指令 二进制编码
m3 指令二进制编码
"M3" 是一个广泛用于嵌入式系统和微控制器的指令集架构。
由于你没有具体指定是哪个制造商或型号的M3,我将提供一个通用的ARM Cortex-M3 指令的二进制编码的示例。
Cortex-M3 的指令通常是16 或32 位的Thumb 指令。
以下是一些Thumb 指令的二进制编码示例:
1. `MOV R0, #10`(将立即数10移动到寄存器R0):
16 位Thumb 指令:
```
20 01
```
32 位Thumb-2 指令:
```
F04F 000A
```
2. `ADD R1, R2, R3`(将寄存器R2和R3的值相加,并将结果存入R1):
16 位Thumb 指令:
```
18 18
```
32 位Thumb-2 指令:
```
EB03 3102
```
这只是一些简单的指令的例子。
实际的指令编码会根据具体的指令、寄存器和操作数而有所不同。
如果你有具体的M3型号或者需要特定指令的编码,你可能需要查阅相关的ARM Cortex-M3 参考手册或技术文档。
Cortex-M3 32位数据操作指令
Cortex-M3 32位数据操作指令名字功能ADC 带进位加法ADD 加法ADDW 宽加法(可以加12 位立即数)AND 按位与(原文是逻辑与,有误——译注)ASR 算术右移BIC 位清零(把一个数按位取反后,与另一个数逻辑与)BFC 位段清零BFI 位段插入CMN 负向比较(把一个数和另一个数的二进制补码比较,并更新标志位)CMP 比较两个数并更新标志位CLZ 计算前导零的数目EOR 按位异或LSL 逻辑左移LSR 逻辑右移MLA 乘加MLS 乘减MOVW 把16 位立即数放到寄存器的底16 位,高16 位清0MOV 加载16 位立即数到寄存器(其实汇编器会产生MOVW——译注)MOVT 把16 位立即数放到寄存器的高16 位,低16 位不影响MVN 移动一个数的补码MUL 乘法ORR 按位或(原文为逻辑或,有误——译注)ORN 把源操作数按位取反后,再执行按位或(原文为逻辑或,有误——译注)RBIT 位反转(把一个32 位整数先用2 进制表达,再旋转180 度——译注)REV 对一个32 位整数做按字节反转REVH/REV16对一个32 位整数的高低半字都执行字节反转REVSH 对一个32 位整数的低半字执行字节反转,再带符号扩展成32 位数ROR 圆圈右移RRX 带进位的逻辑右移一格(最高位用C 填充,且不影响C 的值——译注)SFBX 从一个32 位整数中提取任意的位段,并且带符号扩展成32 位整数SDIV 带符号除法SMLAL 带符号长乘加(两个带符号的32 位整数相乘得到64 位的带符号积,再把积加到另一个带符号64 位整数中)SMULL 带符号长乘法(两个带符号的32 位整数相乘得到64 位的带符号积)SSAT 带符号的饱和运算SBC 带借位的减法SUB 减法SUBW 宽减法,可以减12 位立即数SXTB 字节带符号扩展到32 位数TEQ 测试是否相等(对两个数执行异或,更新标志但不存储结果)TST 测试(对两个数执行按位与,更新Z 标志但不存储结果)UBFX 无符号位段提取UDIV 无符号除法UMLAL 无符号长乘加(两个无符号的32 位整数相乘得到64 位的无符号积,再把积加到另一个无符号64 位整数中)UMULL 无符号长乘法(两个无符号的32 位整数相乘得到64 位的无符号积)USAT 无符号饱和操作(但是源操作数是带符号的——译注)UXTB 字节被无符号扩展到32 位(高24 位清0——译注)UXTH 半字被无符号扩展到32 位(高16 位清0——译注)。
嵌入式控制系统原理及设计课件3-3 Cortex-M3支持的其他汇编指令
嵌入式控制系统原理及设计
3.3.5 SXTB、SXTH、UXTB和UXTH
• SXTB、SXTH、UXTB和UXTH用于将字节或半字数据展开为字数据,语法如 下:
STXB <Rd>, <Rn> SXTH <Rd>, <Rn> UXTB <Rd>, <Rn> UXYH <Rd>, <Rn>
• 对于SXTB/SXTH,数据通过Rn的bit[7]/bit[15]被有符号展开;而对于 UXTB/UXTH,数据则会0展开(无符号展开)为32位。
嵌入式控制系统原理及设计
• REV反转字数据中的字节顺序,而REVH则反转半字数据中的字节顺序。码时:
REV R1,R0
; 结果:R1=0x78563412
REVH R2, R0
; 结果:R2=0x34127856
• REV和REVH适用于大端和小段系统间的数据转换。
3.3.3 REV、REVH和REVSH
嵌入式控制系统原理及设计
• RESVH同REVH类似,但它只适用于低半字数据,且将结果进行有符号展 开。
• 例如,若R0为0x33448899,则执行代码时:
RESVH R1, R0
; 结果:R1=0x FFFF9988
3.3.4 位反转
嵌入式控制系统原理及设计
• SDIV和UDIV是有符号和无符号除法指令,语法如下:
SDIV.W <Rd>, <Rn>, <Rm>
UDIV.W <Rd>, <Rn>, <Rm>
• 其结果为Rd=Rn/Rm。例如:
LDR R0, =250
第3章 Cortex-M3 指令系统

3.2.1指令和指令格式
2. 指令的表示方法 从形式上看,ARM指令在机器中的表示格式是用32位的二进制数
表示。如ARM中有一条指令为: ADDEQS R0, R1, #8
其二进制代码形式为:
31~28 27~25 24~21 20
0000 001
0100 1
3.1.2 指令周期和时序
举例:以ARM7微处理器为例,所有存储器的传输周期都可以被 归结到以下四种类型之一:
(1)不连续周期:ARM请求传输到某个地址或者从某个地址传输 ,但这个地址跟前一个周期用到的地址没有联系,这种情况所 需的时间称为访问一个非顺序的内存位置的周期,简称为N 周 期。
(2)连续周期:ARM请求传输到某个地址或者从某个地址传输, 此地址或者同上一个周期的地址相同或者是上一个周期的地址 之后一个字。这种情况所需的时间称为访问一个顺序的内存位 置的周期,简称为S 周期。
3.2.3指令的条件执行
• 条件后缀只是影响指令是否执行,不影响指令的内容,如上
述ADDEQ指令,可选后缀EQ并不影响本指令的内容,它执 行时仍然是一条加法指令。
要的指令特征和可选后缀的编码;
第3个域是地址基址Rn,是4位[19:16],为R0~R15共16个寄存器 编码;
第4个域是目标或源寄存器Rd,是4位[15:12],为R0~R15共16个 寄存器编 码;
第5个域是地址偏移或操作寄存器、操作数区[11:0]。
3.2.1指令和指令格式
• 3. 汇编指令格式
3.2.3指令的条件执行
程序要执行的指令,均保存在存储器中,当计算机需要执行 一条指令时,首先产生这条指令的地址,并根据地址号打开 相应的存储单元,取出指令代码,CPU根据指令代码的要求 以及指令中的操作数,去执行相应的操作。
Cortex-M3的低层编程

使用位段提取与查表跳转
1
概览
在CM3 上编程,既可以使用C 也可以使用汇编。可能还有其它语言的编译
器,但是大多数人还是会在C 与汇编的世界里游弋。C 与汇编都有尺短寸长,
不能互相取代。使用C 能开发大型程序,而汇编则用于执行特种任务。
2
在使用不同的工具链和芯片时,有大量的用法和用量都随之不同。因此,本
开发环境(IDE)以及调试器。欲知详情,可登录ARM网站()
16
第一步工作
本章为提供了若干汇编写的例子,在实际应用中,这些程序都会用C写。但是
以汇编的方式呈现,有助于让读者更深更好地理解CM3的工作内幕,以便在以后
用C开发时心里更有底。这里给的程序都用ARM的汇编器(armasm)来汇编,其它
工具可能对语法格式有些不同的要求。而且实际上,开发工具几乎都会把启动工
RealView C编译器的3.0版开始,新增了所谓“嵌入式汇编”的功能,它支持
Thumb‐2指令。它让你可以在C程序中插入使用汇编语言编写的函数,
7
例如:
__asm void SetFaultMask(unsigned int new_value)
{
//在这里使用汇编代码实现本函数
MSR FAULTMASK, new_value // 把new_value写入FAULTMASK中
; R0自减,并且根据结果更新标志(有”S”后缀)
BNE loop
; if (R0!=0) goto loop;
; 现在,运算结果在R1中
deadloop
B deadloop
; 工作完成后,进入无穷循环
END
; 标记文件结束
18
Cortex-M3反汇编程序的设计与实现
Cortex-M3反汇编程序的设计与实现孙俊香;于连庆【期刊名称】《计算机应用与软件》【年(卷),期】2014(000)005【摘要】工程实践中,出于项目开发维护、程序调试,或者逆向工程的需要,经常需要对二进制代码进行反汇编。
针对Cortex-M3处理器bin格式代码反汇编程序的总体设计思路以及一些技术难点,给出程序总体结构和技术难点解决思路,最后利用实现的反汇编程序给出LPC1768处理器的反汇编实例。
无论是工程实践,还是学习ARM指令系统,或者是C语言编程实践,该项目都是极好的课题。
%In engineering practice,for the purpose of project development and maintenance,program debugging or reverse engineering, there often has the needs to disassemble the binary code.Aiming at the overall design idea and technological difficulties of disassembler of Cortex-M3 processor in binary format,we put forward a solution for overall structure and technical difficulties of the program.In end of the paper,we present the disassembling example of LPC1768 processor by using realised disassembler.This project is a very good subject for engineering practice,or learning ARM instruction set,or C language programming practice.【总页数】4页(P260-263)【作者】孙俊香;于连庆【作者单位】潍坊学院计算机工程学院山东潍坊261061;北京信维科技股份有限公司北京 100191【正文语种】中文【中图分类】TP313【相关文献】1.基于Cortex-M3的便携式环境监测仪设计与实现 [J], 王成超;李锋;张腾飞2.TMS320C25反汇编程序的设计与实现 [J], 吉根林;林敏3.基于Cortex-M3的无线语音智能相框的设计与实现 [J], 刘钧火; 赵威海; 罗来俊4.一种基于Cortex-M3的任务核心机制的设计与实现 [J], 方敏5.基于Cortex-M3内核的无功补偿模块自动调试检测系统设计与实现 [J], 郑月节因版权原因,仅展示原文概要,查看原文内容请购买。
cortex-m3三级流水线计算例题
cortex-m3三级流水线计算例题
Cortex-M3是一款具有三级流水线结构的嵌入式处理器,其流水线包括指令提取(Fetch)、指令译码(Decode)和执行(Execute)三个阶段。
下面是一个简单的Cortex-M3三级流水线计算例题的解答过程:
题目:计算表达式 y = (a + b) * c - d
1. 指令提取(Fetch)阶段:
在该阶段,处理器从存储器(或缓存)中获取指令并将其存入指令寄存器。
2. 指令译码(Decode)阶段:
在该阶段,处理器解码指令并获取操作数,同时将操作数传递给执行阶段。
3. 执行(Execute)阶段:
a. 加法(Add)阶段:将操作数 a 和 b 相加得到结果 x = a + b。
b. 乘法(Multiply)阶段:将结果 x 与操作数 c 相乘得到结果 y = x * c。
c. 减法(Subtract)阶段:将结果 y 减去操作数 d 得到最终结果 y = y - d。
以上是Cortex-M3三级流水线对于表达式 y = (a + b) * c - d 的计算过程。
需要注意的是,流水线能够提高处理器的性能,但也可能引入一些数据冲突和控制冲突。
为了避免流水线冲突,处理器可能需要进行流水线插入(插入适当的空闲周期)或采用其他处理器优化技术。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
DCD WDT_IRQHandler ;16: Watchdog Timer 看门狗定时器中断
;商用CRP_LEVEL=2 0x87654321
PRESERVE8
THUMB
;Vector Table Mapped to Address 0 at Reset复位后映射在地址0x00000000处的向量表
AREA RESET, CODE, READONLY
DCD PendSV_Handler ;14: PendSV Handler 系统设备挂起请求
DCD SysTick_Handler ;15: SysTick Handler 系统节拍定时器
DCD EINT1_IRQHandler ;35: External Interrupt 1 外部中断1
DCD EINT2_IRQHandler ;36: External Interrupt 2 外部中断2
DCD TIMER2_IRQHandler ;19: Timer2 定时/计数器2中断
DCD TIMER3_IRQHandler ;20: Timer3 定时/计数器3中断
DCD QEI_IRQHandler ;47: Quadrature Encoder Interface正交编码器
DCD PLL1_IRQHandler ;48: PLL1 Lock (USB PLL) PLL1锁定中断
DCD SPI_IRQHandler ;29: SPI SPI中断
DCD SSP0_IRQHandler ;30: SSP0 SSP0中断
DCD PWM1_IRQHandler ;25: PWM1 PWM1中断
DCD I2C0_IRQHandler ;26: I2C0 I2C0中断
DCD UART0_IRQHandler ;21: UART0 串口0中断
DCD UART1_IRQHandler ;22: UART1 串口1中断
DCD 0 ;10: Reserved 保留
DCD SVC_Handler ;11: SVCall Handler 调用SVC异常中断
DCD MemManage_Handler ; 4: MPU Fault Handler 存储器管理失败
DCD BusFault_Handler ; 5: Bus Fault Handler 总线失败
DCD I2S_IRQHandler ;43: I2S I2S中断
DCD ENET_IRQHandler ;44: Ethernet 以太网中断
DCD UART2_IRQHandler ;23: UART2 串口2中断
DCD UART3_IRQHandler ;24: UART3 串口3中断
DCD DebugMon_Handler ;12: Debug Monitor Handler 调试监视器请求中断
DCD 0 ;13: Reserved 保留
DCD UsageFault_Handler ; 6: Usage Fault Handler 用法失败
DCD 0 ; 7: Reserved 保留[自生成校验和值]
DCD USBActivity_IRQHandler ;49: USB Activity interrupt to wakeup USB活动
DCD CANActivity_IRQHandler ;50: CAN Activity interrupt to wakeup CAN活动
DCD RIT_IRQHandler ;45: Repetitive Interrupt Timer 重复中断定时器
DCD MCPWM_IRQHandler ;46: Motor Control PWM 电机控制PWM
DCD 0 ; 8: Reserved 保留
DCD 0 ; p ; 0: Top of Stack 堆栈顶端定义
DCD START ; 1: Reset Handler 复位入口地址
DCD I2C1_IRQHandler ;27: I2C1 I2C1中断
DCD I2C2_IRQHandler ;28: I2C2 I2C2中断
DCD TIMER0_IRQHandler ;17: Timer0 定时/计数器0中断
DCD TIMER1_IRQHandler ;18: Timer1 定时/计数器1中断
;Address 0x0000 02FC ISP-Flash在地址0x0000 02FC处定义ISP访问片内Flash的限制等级[调试-0,商用-2]
AREA |.ARM.__at_0x02FC|, CODE, READONLY
DCD 0xFFFFFFFF ;调试CRP_LEVEL=0 0xFFFFFFFF
GET ..\ASMFILE\LPC1700Cfg.s ;包含CPU特殊寄存器定义文件
GET ..\ASMFILE\LPC1700PinCfg.s ;包含芯片管脚功能定义文件
GET ..\ASMFILE\TargetCfg.s ;包含目标板常数内存定义文件
DCD RTC_IRQHandler ;33: Real Time Clock 实时时钟中断
DCD EINT0_IRQHandler ;34: External Interrupt 0 外部中断0
DCD EINT3_IRQHandler ;37: External Interrupt 3 外部中断3
DCD ADC_IRQHandler ;38: A/D Converter A/D转换器中断
DCD SSP1_IRQHandler ;31: SSP1 SSP1中断
DCD PLL0_IRQHandler ;32: PLL0 Lock (Main PLL) PLL0锁定中断
DCD NMI_Handler ; 2: NMI Handler 不可屏蔽中断
DCD HardFault_Handler ; 3: Hard Fault Handler 硬件失败中断
DCD BOD_IRQHandler ;39: Brown-Out Detect 掉电检测中断
DCD USB_IRQHandler ;40: USB USB中断
DCD CAN_IRQHandler ;41: CAN CAN总线中断
DCD DMA_IRQHandler ;42: General Purpose DMA GPDMA中断