航路再寻径
厦门VTS服务区航路规则
8
引航
Pilotage
交通服务 Traffic Service 中心可提供: VTS 中心可提供: 1. 交通信息(应请求) 2. 助航服务(应请求) 3. 支持联合行动(应请求) 4. 播发 VHF 航行通(警)告信息 5. 交通组织
பைடு நூலகம்
引航锚地: 引航锚地: 4 号锚地为引航及检疫锚地。 强制引航: 强制引航: 外国籍船舶、法律法规规定应当申请引航的中国籍船舶。
航 路 规 则 Route Regulations
适用船舶: 适用船舶: 按有关国际公约和国内规范规定应配备通信设备及主管机关要求加入 VTS 系统的船舶。 航路: 航路: 厦门湾航道主要有十万吨级主航道、海沧航道、东渡航道、鹭江航道、马銮航道、漳州航道和后石航道。 进出港限制: 进出港限制: 厦门湾航道是有条件的双向通行,如船舶尺度超过通航能力、气象恶劣或发生危险情况,船舶进出港可能会受到限制。 超过 500 总吨的船舶禁止在鹭江水道航行;水线以上高度大于 53 米的船舶被限制进入东渡航道跨海电缆和海沧大桥的区域。 航速限制: 航速限制: 船舶航行应遵守主管机关公布的航速限制规定,采取安全航速,并遵守下列各区域最高航速限制: 500 总吨以上船舶:A 区为 15 节,B 区为 12 节,C 区为 10 节,D 区为 8 节。 未满 500 总吨船舶:A 区为 18 节,B 区为 12 节,C 区为 12 节,D 区为 10 节。 A 区为青屿至墓前礁灯桩航段;B 区为墓前礁灯桩至兔屿的东渡航段;C 区为海沧港区航道及东渡航段兔屿以北至马銮、高崎航段;D 区为鹭江水 道,外户碇灯浮与棺材礁灯桩之间海域。 Application: Ships equipped with the required communication equipment in accordance with the relevant international conventions and/or national rules and regulations and ships, which the competent authority may require to be governed by the VTS. Fairway: Fairway: The fairways of Xiamen gulf consist of the main fairway, Haicang fairway, Dongdu fairway, Lujiang fairway ,Maluan fairway, Zhangzhou fairway and Houshi fairway. Restrictions for entry and departure: Xiamen gulf fairways are of conditional two-way traffic. Limitation may be imposed on over-sized ships or bad weather condition or dangerous situation. Vessels of more than 500 gross tonnages should not proceed to Lujiang Channel; Air-draft over 53 meters should not transit Dongdu Fairway. Speed limitation: Vessels’ speed should not exceed the limited speeds in each area as following: Vessels of 500 gross tonnages or over: 15 knots in Main fairway, 12 knots in south of Dongdu fairway, 10 knots in north of Dongdu fairway or Maluan fairway or Haicang fairway, 8 knots in Lujiang Channel. The other vessels: 18 knots in Qingyu fairway, 12 knots in Dongdu fairway, Maluan fairway and Haicang fairway, 10 knots in Lujiang Channel.
航路点目录——精选推荐

118°46′580E 118°40′400E 118°48′300E
119°15′400E 118°26′145E 118°26′240E 118°28′000E 118°31′350E 118°33′400E 118°35′480E 119°24 ′580E 119°47 ′720E 122°06′780E 119°53′340E 121°31′730E 118°33′370E 122°07′230E
1ቤተ መጻሕፍቲ ባይዱ0°10′300E 120°07′000E
119°58′100E 119°48′600E 119°42′650E
119°39′250E 119°38′600E 119°37′910E 119°37′470E 119°38′400E 119°39′440E 119°39′100E 121°33′400E 121°13′400E 120°48′000E 121°49′420E 121°46′630E 121°37′730E 120°56′800E
备注
制表人: 1
船名:
航路点 0037 0038 0039 0040 0041 0042 0043 0044 0045
0046 0047 0048 0049 0050 0051 0052 0053 0054 0055 0056 0057 0058 0059
0060 0061 0062 0063 0064 0065 0066 0067 0068 0069 0070 0071 0072 0073
时间:
纬度 26°51′350N 27°00′580N 27°28′310N 27°37′940N 27°42′880N 28°23′150N 30°54′900N 30°33′150N 31°13′000N
长江江苏段深水航路调整的必要性和可行性
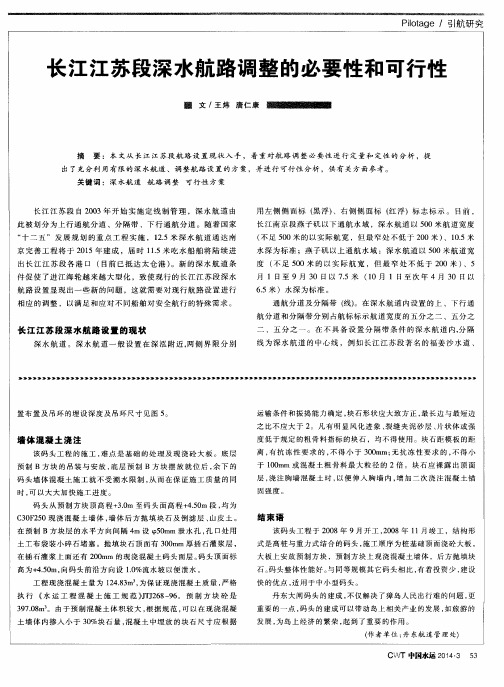
“ 十二 五 ”发展 规划 的重 点工程 实施 ,1 2 . 5米 深 水 航 道 通 达 南 京完 善工 程将 于 2 0 1 5年 建 成 ,届 时 1 1 . 5米 吃 水 船 舶 将 陆 续 进 出 长江江 苏段 各港 口 ( 目前 已 抵 达 太 仓 港 ) 。新 的深 水 航 道 条 件 促 使 了进 江 海 轮 越 来 越 大 型 化 ,致 使 现 行 的 长 江 江 苏 段 深 水 航 路 设 置 显 现 出一 些 新 的 问 题 ,这 就 需 要 对 现 行 航 路 设 置 进 行 相 应 的 调 整 , 以满 足 和 应 对 不 同 船 舶 对 安 全 航 行 的特 殊 需 求 。
置 布置及吊环的埋设深度及吊环尺寸见图 5 。
运 输 条件 和振 捣 能 力确 定 , 块 石 形 状应 大致 方 正 , 最 长边 与最 短 边
之 比 不应 大 于 2 。 凡有 明 显 风 化 迹 象 、 裂 缝 夹 泥砂 层 、 片 状 体 或 强
墙体 混ቤተ መጻሕፍቲ ባይዱ凝土 浇 注
该 码 头 工 程 的施 工 , 难 点 是 基 础 的处 理 及 现 浇 砼 大 板 。底 层
P i l o t a g e /引航研 究
长江江 苏段深 水航路 调整 的必要性 和可行性
文/ 王炜 唐 仁 康
摘
要 : 本 文从 长 江 江 苏 段 航 路 设 置 现 状 入 手 , 着 重 对航 路 调 整 必 要 性 进 行 定 量 和 定 性 的 分 析 ,提
出了充分利 用有限的深 水航道 、调 整航路 设置 的方案 ,并进 行可行性 分析 ,供 有 关方 面参考 。
我国首次对船舶航路进行规划
长 江 中游 宜 昌下 I 坪 至 城 陵 矶 河 段 每 年 l 临江 1月
由 中 国 海 上 搜 救 中心 、天 津 市 海 上 搜 救 中
调查结束之 日起 ,2 0个工作 日内制作 《 舶污 船
染事故认定书》 ,并 送 达 当事 人 。重 大 以 上 船 舶 污 染 事 故 的调 查 处 理 报 告 应 当 向 国 务 院 交 通 运 输 主 管 部 门备 案 。造 成 海 洋 环 境 污 染 的船 舶 应
心 、 大 连 海 事 大 学 联 合 编 制 的 《 家 海 上 搜 救 国 手 册 》 日前 由 大 连 海 事 大 学 出 版 社 出版 。 交 通 运 输 部 副 部 长 、 中 国 海 上 搜 救 中 心 主 任 徐 祖 远
为 本 书 作 序 。该 手 册 共 分 l 章 和 5个 附 录 ,包 1
当在 开航前缴 清为减 轻污染损 害所 采取应 急处
置 措 的相 关 费 用 。
括序 言 、海上搜 救组织 体系及其 职责 、海 上搜
我 国首次对
救通信 、接警评 估与初 始行动 、搜 寻计划 、搜
船舶
行划 规
寻行动 、救助计划 、救助 行动 、救 助结束 、后 期 处置和搜救信 息的发 布等 ,对海上人命搜救 , 保 障人 民群众生命 、财产 安全 ,具有较 强 的理
码头接卸能 力 3 . 9亿 t 。新增集 装箱码头通 过能
力 58 0万 T U。 0 E
沿着运河就不会迷路

记者 I 丁 云
海 四 港 ,计 吴 淞 港 、 浏 河 港 、 自 茆 港 、
060 I M ODERN SUZH0 U
福 山港 。 辖 内 河 八港 ,长 洲 县 放 生 池港 ,长 洲 县 蠡 口
很重, 能和 道教 文 昌 阁并 肩 。 “ 钟 声 ” 今 天 只 能遥 想 。 龙 华 寺 后 来 作 了 吴 县 中 学 的 一 部
分 ,吴 县 中 学迁 走 后 ,又 成 了浒 墅 关 中学 。现 在 ,那 里 也 成 了浒 墅 关 中学 I B 址 ,在 浒墅 关镇 上 ,原地 保 有一 块 龙 华寺 奠 基 的大 青
了 “ 董 ”。
这 样 的 格 局 是在 太 平 天 国 时破 坏 的 。 解放 后 ,运
河又 经历 了 1 9 6 9 年和 1 9 9 2 年 两次 拓 宽 。以 昔 日里浒 墅 关 的繁 华 ,如 果 上世 纪 六 十 年代 浒 墅 关及 河上 古 桥 得 以保 留 ,后 来就 没有 江南 六镇 什么 事 J L T。
董 公 堤 今 天 仍 在 ,过 去 很 长 ,现 在 恢 复 了一 小 段 。经 修 整 ,似 环 古 城 河 带 的 健 身 步道 ,两 岸 春 意 如
港 ,吴 县 木 渎港 ,无锡 县 柏 渎 港 ,无锡 县通 常熟 的 转
水 河 港 ,无 锡直 通 太湖 的 大 渲 港 ,武 进 县 下埠 港 ,宜
沿 河 景 观 带 ,闪 光灯 毫 无 预 兆地 闪烁 ,船 上 人 的 目光
所 以 浒 墅 关 榷 使 的 官 阶 是 正 六 品 , 比 当 时 吴 县
的 七 品 县 令 官 阶 高 。苏 州 高 新 区文 联 副 主席 钦 瑞 兴 研
求各分点间的恒向线航向与航程

)tg
确定分点经度后,可利用该式求出分点纬度。在各分点求出后, 便可利用航迹计算求出各分点间的恒向线航向和航程。 在航海实际中,主要利用计算机编程或用导航仪和组合导航系 统的辅助计算功能解算大圆航线问题。
(4)在大圆航线上确定各分点:通常取整度经线与该线的交点为一分 点,然后量出各分点的经、纬度。 (5)将各分点按其经、纬度移画到航用海图上去,并用直线连接相邻 分点,便得折线状大圆航线,每段折线即为分点间恒向线航线。 (6)量出各段恒向线的航向和航程,并列表备航。
2.大圆改正量法
当两点间距离不太远时在航用海图上两点间的大圆方位和恒 向线方位相差一个大圆改正量值
第一节 大圆航线与混合航线
一、大圆航线
大圆航线是跨洋航行时所采用的地理航程最短的航线。由于大 圆弧与各子午线的交角,除赤道与子午线外,都不相等,因此,所 谓沿大圆航线航行,实际上并不是船舶不断改变航向、严格沿着大 圆弧航迹航行,而是将大圆弧分成若干小段,每一段仍然是沿恒向 线航线航行。 大圆航线可以取大圆弧内接分段恒向线,如图(a)所示的AB, BC,CD…;
sin(3540) tgCI cos(3202) tg (639) sin(3202) cos(3540) 0.583069 0.847740 (0.116588) 0.530413 0.812423
1.100637
CI arctg (1.100637) 47.7428 132.2572SW 312.3
大圆航线虽航程短,但如果其一直穿越风、 流影响大的海区,则不仅影响船舶安全,而且降 低营运效益;恒向线航线虽应用方便,如果不视 情况选用,也势必造成航行时间的延长。因此, 应认真对各种条件和因素进行分析,得出适合当 时环境的最佳航线。
无人机自主飞行航迹规划问题1

目录一、问题重述 (2)二、符号说明 (2)三、基本假设 (3)四、问题分析 (3)4.1二维空间无人机航迹规划 (4)4.2三维空间无人机航迹规划 (5)五、模型的建立与求解 (6)5.1 二维空间无人机航迹规划 (6)5.1.1 单个雷达模型的建立 (6)5.1.2 利用Voronoi图对雷达威胁网络的划分 (6)5.1.3 路径代价的加权计算 (7)5.1.4 利用Dijkstra 算法进行最优路径搜索 (8)5.1.5 利用CHC算法对初始航迹进行优化处理 (9)5.2 三维空间无人机航迹规划 (10)5.2.1 三维数字地图的平滑 (11)5.2.2 三维空间路径代价的定义和加权计算 (11)5.2.3 消除不可行节点的扩展 (15)5.2.4 将三维空间的搜索转变成二维平面的搜索 (15)5.2.5 使用A*算法进行最优航迹搜索 (15)5.2.6 优化和调整航迹 (16)5.3 模型的仿真和可行性分析 (17)5.3.1二维空间无人机航迹规划模型 (17)5.3.2三维空间无人机航迹规划模型 (18)六、模型优缺点 (20)6.1 二维空间无人机航迹规划模型 (20)6.1.1模型优点: (20)6.1.2模型缺点: (21)6.2 三维空间无人机航迹规划模型 (21)6.2.1模型优点: (21)6.2.2模型缺点: (21)七、模型的推广 (21)◆可以用于高速突防弹道导弹的路径规划 (21)◆用于车载GPS卫星定位的汽车自动寻径 (21)八、参考文献 (22)一、问题重述无人机是军事领域中最具有威胁的空中突防武器之一,凭借着它良好的机动特性,无人机可以执行如情报获取,侦察监督;实施雷达干扰、迷惑欺骗对方;压制对方防空火力(SEAD),因此世界各国争相在无人机方向进行大量的研究,我国的在无人机方面也做出了大量的研究,其中西北工业大学在祖国的无人机方面做出了突出贡献。
无人机最主要的能力就是它的自主飞行能力,要在复杂多变的战场环境中保全自己,完成任务,那就需要相当程度的飞行路径规划能力,无人机的航迹规划是指单机在初始位置、终止位置和一些目标任务结点确定之后的飞行轨迹问题,其基本功能是根据无人机的性能和飞经的地理环境、威胁环境等因素,对已知的目标规划提出满足要求的航迹,以便在实际飞行时可以根据需要进行实时局部修改。
路网规划中的道路纠偏及轨迹匹配方法

路网规划中的道路纠偏及轨迹匹配方法在路网规划的过程中,道路纠偏及轨迹匹配方法是一个重要的环节。
道路纠偏是指将采集到的待纠偏轨迹点根据实际道路网络进行修正,从而得到准确的轨迹路径。
轨迹匹配方法是指将已纠偏的轨迹路径与道路网络中的道路进行匹配,以确定车辆经过的道路及行驶的轨迹。
本文将探讨道路纠偏及轨迹匹配方法的相关内容。
首先,道路纠偏是路网规划的重要一环。
在实际采集的轨迹数据中,由于多种原因,如GPS定位误差、遮挡等,轨迹点的位置会存在一定的偏差。
因此,需要对轨迹点进行纠偏,使其能够更加准确地反映车辆的实际行驶路径。
常用的道路纠偏方法包括线性插值法、速度约束法和贝叶斯方法等。
线性插值法是一种简单且广泛应用的道路纠偏方法。
它基于轨迹点之间的连续性,将原始轨迹点与道路网中的道路进行连线,然后根据车辆行驶方向和速度进行插值,从而得到纠偏后的轨迹路径。
速度约束法则是基于车辆行驶速度的约束条件,对轨迹点进行补偿和修正。
通过考虑车辆行驶速度的变化,可以更加准确地还原车辆的行驶路径。
贝叶斯方法是一种基于统计学原理的道路纠偏方法。
它通过建立统计模型,将道路纠偏问题转化为概率估计问题,从而通过最大似然或最大后验概率等方法,得到最优的道路纠偏结果。
在道路纠偏完成后,需要将纠偏后的轨迹路径与道路网络进行匹配,以确定车辆经过的道路及行驶的轨迹。
轨迹匹配方法主要包括基于距离的匹配方法和基于拓扑结构的匹配方法。
基于距离的匹配方法是一种常用的轨迹匹配方法。
它通过计算纠偏后的轨迹路径与道路网络中的道路之间的距离,选择最短距离的道路作为车辆的行驶路径。
基于距离的匹配方法简单直观,计算效率高,但对于复杂的道路网络和车辆行驶轨迹并不适用。
基于拓扑结构的匹配方法则是一种更加准确的轨迹匹配方法。
它基于道路网络的拓扑结构,将纠偏后的轨迹路径与道路网络中的节点和边进行匹配。
通过考虑车辆行驶路径与道路网络中的拓扑结构的一致性,可以得到较为准确的轨迹匹配结果。
高中历史-新航路开辟教案
新航路开辟教案一.教材分析本课教材主要从三个方面向学生介绍了欧洲人开辟新航路的历史:东方的诱惑(即原因和条件),新航路的开辟(即经过),走向会合的世界(即影响)。
本科内容在世界近代史教材中的地位相当重要,建议教师在教学时必须注意理顺教材前后知识的内在逻辑关系:商品经济的发展和资本主义萌芽的兴起是新航路开辟的经济根源;新航路的开辟打破了整个世界相对孤立的状态,促进了人类文明逐渐成为一个整体。
二.教学目标:知识与能力:掌握新航路开辟的原因,以及产生的结果和后果;了解四次重要远航经过。
培养学生分析问题和评价历史事件的能力。
过程与方法:通过提问—作答—分析的引导学习的方式,培养学生不断思考、独立学习的思维能力;通过探究学习,扩宽学生学习知识面,指引学生深入学习。
情感与价值观:通过对新航路开辟过程的学习,使学生感受和学习探险家们勇于进取的探索精神;通过对开辟新航路影响的学习,使学生认识到新航路开辟促进了整个人类社会的发展。
三.教学重难点重点:开辟新航路的原因和影响难点:新航路开辟与郑和下西洋进行比较和对其评价问题四.学情分析对于本节课学生在初中已经有了一定的学习基础背景,掌握起来相对容易。
建议教师把重点放到新航路开辟的历史影响中。
五.教学方法:多媒体辅助下设置疑问导学法六、课前准备1.学生的学习准备:预习课本知识,完成学案。
2.教师的教学准备:多媒体课件制作,课前预习学案,课内探究学案,课后延伸拓展练习。
七、课时安排:1课时八、教学过程(一)预习检查、总结疑惑检查落实了学生的预习情况并了解了学生的疑惑,使教学具有了针对性。
(二)情景导入、展示目标。
师:有人说:西欧封建社会的末期,是“人”和“世界”被发现的时代,同学们知道这指的是什么历史事件吗?生:略师(说教材):《开辟新航路》是高中《历史·必修二》第5课的内容。
从三个方面介绍了欧洲人开辟新航路的历史:即新航路开辟的原因和条件、新航路开辟经过以及影响。
典型航路规划方法的基本原理例题展示
1.简要论述典型航路规划方法的基本原理(任选方法之一,且选择该方法中的一种具体方法。
)并举例说明。
(1)路标图法;(2)单元分解方法;(3)人工势场法答:选择(1)路标图法。
概略图( Skeleton)也称路标图( Roadmap )。
在基于概略图空间的路径规划方法中,首先根据一定的规则将自由的C空间(Configuration Space)表示成一个由维的线段构成的网络图,然后采用某一搜索算法在该网络图上进行航迹搜索。
这样,规划问题被转化为一个网络图的搜索问题。
概略图必须表示出C空间中的所有可能的路径,否则该方法就是不完全的,即可能丢失最优解。
常用的概略图方法包括通视图法( Visibility Graph)、Voronoi图法、轮廓图法( Silhouette)、子目标网络法(Subgoal Network )和随机路线图法( Probabilistic Roadmap, PRM)。
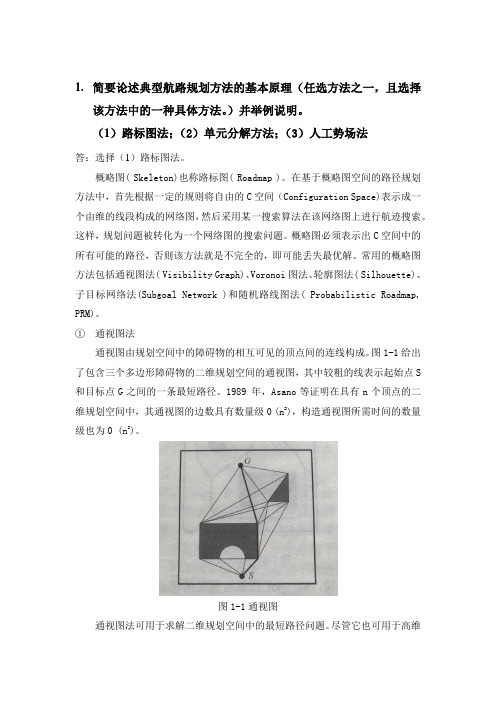
①通视图法通视图由规划空间中的障碍物的相互可见的顶点间的连线构成。
图1-1给出了包含三个多边形障碍物的二维规划空间的通视图,其中较粗的线表示起始点S 和目标点G之间的一条最短路径。
1989 年,Asano等证明在具有n个顶点的二维规划空间中,其通视图的边数具有数量级0 (n2),构造通视图所需时间的数量级也为0 (n2)。
图1-1通视图通视图法可用于求解二维规划空间中的最短路径问题。
尽管它也可用于高维规划空间,但此时生成的路径将不再是最短的。
由于通视图不能表达物体运动的方向性约束,除非运动物体可以按任何方向以任意角度转弯,通常很少用通视图法求解实际的路径规划问题。
② Voronoi图法如果运动物体要求与障碍(或威胁)的距离越远越好,可以采用Voronoi图方法。
Voronoi 图由与两个或多个障碍(或威胁)的给定特征元素距离相等的点的集合构成。
图1-2 给出了以多边形障碍物自身作为特征元素生成的Voronoi 图。
分道通航制

三、船舶定线制的种类
4.避航区 避航区(Area to be avoided)是由一个区域构成的一种定线 措施,在该划定区域内,或者是由于航行待别危险,或者是 对于避免海难事故特别重要,所有船舶或某些级别的船舶必 须避离的区域。 end
三、船舶定线制的种类
5.沿岸通航带 沿岸通航带 沿岸通航带(Inshore traffic zone)是由一个区域构成的一 沿岸通航带 (Inshore zone) 是由一个区域构成的一 种定线措施, 种定线措施 , 是指通航分道向岸一侧的边界线与相邻海岸之 间的水域 end
三、船舶定线制的种类
6.环行航道 环行航道(Roundabout)是由分隔点或圆形分隔区和一个规定 界限的环行通航分道所组成的一种定线措施。在环行航道内, 船舶按逆时针方向绕分隔点或圆形分隔区航行。 end
三、船舶定线制的种类
7.警戒区 警戒区(Precautionary area)是由一个区域构成的一种定线 措施,在警戒区内,驾驶船舶必须要特别谨慎。在警戒区内 可能有推荐的交通流方向 (同时会由三角型里有一感叹号 标志出现)
三、船舶定线制的种类
1.分道通航制 分道通航制(Traffic separation scheme——TSS)是用适 当的方法建立通航分道,分隔相反方向的交通流的一种定线 措施.它是船舶定线的最主要、最常用的形式 end
三、船舶定线制的种类
2 .双向航路 双向航路(Two-way route)是在指定的范围内所建立的一种 双向通航,旨在为通过航行困难或危险水域的船舶提供安全 通道的一种航路。该航路上不允许有第三方向的交通。 (靠右靠边行驶)end
!
三、船舶定线制的种类
8.深水航路 深水航路(Deep-water route)是在划定的界限内经过精确测 量、海底或海图所标障碍物上的水深足够的航路 (表示最大吃水22.5米) end
长江上海段船舶定线制航路调整方案

长江上海段船舶定线制航路调整⽅案附件1:长江上海段船舶定线制航路调整⽅案(参考海图:中华⼈民共和国海事局海图44211、44121、44122、44123、44124、44125、44126、44127、44128、44129、44131、44132、44133、44134、44135、44173、44001、44171、44172、44174、44175、43001)⼀、长江上海段航路(⼀)主航道1.长江⼝深⽔航道1)长江⼝深⽔航道北槽航道北边界线:地理坐标A,D3⾄D45号奇数号灯浮的依次连线向航道中⼼线平移75⽶之平⾏线⾄地理坐标点H1的依次连线。
南边界线:地理坐标B、D4、D6、D8号灯浮、D10 AIS虚拟航标,D12⾄D42号偶数号灯浮的依次连线向航道中⼼线平移75⽶之平⾏线⾄地理坐标J1的依次连线。
2)长江⼝深⽔航道延伸段深⽔航道延伸段位于外⾼桥航道、宝⼭航道和宝⼭北航道中,其边界线由AIS虚拟航标标⽰。
北边界线:地理坐标H1,“SHEN SHUI BEI JIE 1”号⾄“SHEN SHUI BEI JIE 14”号AIS虚拟航标的依次连线;南边界线:地理坐标J1、“SHEN SHUI NAN JIE 1”号AIS虚拟航标、地理坐标J2,“SHEN SHUI NAN JIE 2”号⾄“SHEN SHUI NAN JIE 14”号AIS虚拟航标的依次连线;分隔线:地理坐标I1⾄地理坐标I8的依次连线,将外⾼桥航道、宝⼭航道和宝⼭北航道分隔成进出⼝通航分道。
2.外⾼桥航道北边界线:47、49、51、53号灯浮和地理坐标G的依次连线。
南边界线:A54A、A54B、A56、A58和A60号灯浮的依次连线。
3.宝⼭航道北边界线:67、69、71号灯浮和地理坐标﹠2的依次连线。
南边界线:66、68、70、72号灯浮和地理坐标S的依次连线。
4.宝⼭北航道北边界线:75、77、79、81、83和85号灯浮的依次连线。
航路与导航 航路

一、航路(1)
飞机从地球表面一点(起点)到 另一点(终点)的预定航行路线 叫航线,也称为预计航迹。确定 航线的元素是方向和距离。
由于地面导航设施、空中交通管 理、飞行任务、地形等因素的影 响,一条航线常常由起点、转弯 点、终点等航路点构成,其中还 包括指定的或飞行员自选的检查 点,这样的航线称为航路。
一、航路(2)
在目视飞行规则(VFR)条件下飞行, 通常以起飞机场作为航线起点,以着 陆机场作为航线终点,转弯点和检查 点则是一些明显易辨的地面景物。
在仪表飞行规则(IFR)条件下飞行, 通常以起飞机场和着陆机场的主降方 向远距台或附近的归航台为航线起点 和终点,而转弯点和检查点则是一些 无线电导航点或位点。实施区域导 航时,这些航路点则是一些选定的点 (采用经纬度表示)。
航路勾径定义-概述说明以及解释

航路勾径定义-概述说明以及解释1.引言1.1 概述航路勾径定义的概述部分将介绍本文的研究对象——航路勾径。
航路勾径作为航空领域中的重要概念,对于确保航空交通的安全性和效率至关重要。
航路勾径是指在飞行任务中,航空器需要按照指定的航线进行飞行,其中航线的形状可能包含多个弯曲的路径。
这些曲线路径不仅是为了避开地理障碍物,如高山或禁飞区域,还是为了实现最佳的飞行效率和经济性。
航路勾径的定义涉及到航空航行规则、地理环境、空中交通管理系统以及航空器的性能等多个方面。
在航空航行规则中,航路勾径通常根据航空器的速度和操控能力而确定,并且需要符合国际航空运输协会(ICAO)所制定的标准和规范。
航路勾径的概念在航空领域中具有广泛的应用价值。
首先,航路勾径可以提高飞行任务的安全性。
通过规划和设计合理的航路勾径,可以避开地理障碍物和飞行障碍物,减少事故和碰撞的风险。
其次,航路勾径可以提高飞行任务的效率和经济性。
通过选择最佳的航线,减少航空器的时间和能源消耗,航空公司和航空运输业者可以降低运营成本,并提高航班正点率和客户满意度。
总之,航路勾径的定义是航空领域中的一个重要概念,它对于确保航空交通的安全性和效率起着至关重要的作用。
通过合理规划和设计航路勾径,可以使航空业在现代社会中发挥更加重要的作用,并为未来的航空技术和航空领域的发展提供更多的研究方向和创新空间。
1.2文章结构文章结构部分的内容可以根据以下内容进行编写:1.2 文章结构本文将按照以下结构进行论述:引言部分对航路勾径的概述、文章目的进行介绍;正文部分包括航路的定义、勾径的概念以及航路勾径的作用进行解析;结论部分对航路勾径的重要性进行总结,指出其对航空领域的影响,并展望未来的研究方向。
首先,在引言部分,我们将对航路勾径的概述进行简要介绍。
航路勾径在航空领域中起到重要作用,对于航班的安全、效率和经济性具有重要影响。
文章将通过对航路勾径定义、勾径概念和作用的探讨,旨在深入理解航路勾径的原理和意义。
5.15+探寻新航路+课件-+2024-2025学年统编版九年级历史上册

我们也完全有能力开辟一条通往东方的新航路,因为…
思考:假如你是当时的一位航海家,具备怎样的条件,才 可以远航?
1.经济根源:开拓新的贸易市场 2.社会根源:到东方寻找黄金和香料 3.商业危机: 传统东西商路受阻 4.技术条件: 地圆说、造船和航海技术进步
探索联系的四条航路
探索联系的四条航路
第15课 探寻新航路
新式联系的多元驱动
自荐信
尊敬的国王陛下: 我克里斯托弗·哥伦布认为我们开辟一条通往东方的新航路是
迫切而有必要的,因为…… 而且现在我们也完全有能力开辟一条通往东方的新航路,因
为…… 恳请国王陛下恩准并给予我们大力支持。 克里斯托弗·哥伦布 1492年3月15日
我们认为开辟一条通往东方的新航路是迫切而有必要的, 因为……
达·伽马
探索联系的四条航路
哥伦布
探索联系的四条航路
麦哲伦
阅读课本,完成材料上的表格,并画出四位航海家的航行路线
一个中心 四个人物 两个国家 两个方向
时间
航海家
支持国
方向
最终到达地
1487年 1497年
迪亚士 葡萄牙 达·伽马 葡萄牙
1492年
哥伦布 西班牙
1519-1522年 麦哲伦 西班牙
我们有2个月没有吃到新鲜食物。我们吃饼干,其实那 些东西已经不成其为饼干,而是爬满蛆的碎末。我们喝的是 黄水,储存多天,臭得令人作呕。我们也吃牛皮。老鼠的价 格是每只半个金杜卡,但是连老鼠也买不到。我们有些船员 的上下牙龈都肿了起来,根本无法吃东西,活活被饿死。死 于这种病的有19人。
哥伦布船队,出发87人,生还者40人; 伽马船队,出发170人,生还者54人;
材料一:15世纪末期的欧洲,社会分工不断扩大,资本主义萌芽出
全国沿海船舶航路总体规划

全国沿海船舶航路总体规划中华人民共和国交通运输部二○一一年十月全国沿海船舶航路总体规划交通运输部二○一一年十月目录一、规划背景 (1)二、现状和作用 (2)三、航路规划的目标 (3)四、指导思想 (3)五、规划原则、范围及形式 (3)(一)规划原则 (3)(二)规划范围 (3)(三)规划形式 (4)六、规划方案 (4)七、措施和建议 (9)(一)分步实施方案 (9)(二)建立互动协调机制 (10)(三)加强宣传工作和人才培养 (10)一、规划背景交通运输业是国民经济的基础性和先导性产业。
近年来,我国水路交通运输业得到了长足的发展,水路交通运输在国民经济中的地位越来越重要。
我国的重要物资运输以及外贸运输,绝大部分都依赖海运,其中海运承担的外贸运量更是超过90%。
据统计,2010年底全国港口拥有生产用码头泊位31634个,全国拥有水上运输船舶17.84万艘。
2010年全国完成水路客运量2.24亿人、旅客周转量72.27亿人公里,完成水路货运量37.89亿吨,货物周转量68427.53亿吨公里,全国港口完成货物吞吐量89.32亿吨。
随着我国海上运输业的快速发展,我国沿海已经成为世界上水上交通最繁忙的区域之一。
目前每年航行于我国沿海水域的船舶已达464万艘次,平均每天1.27万艘次,其中各类油轮超过16万艘次,平均每天400多艘次。
水上交通安全面临严重的威胁,油污风险不断增加。
据统计,2010年全国共发生运输船舶水上交通事故331件,死亡329人,沉船195艘,直接经济损失3.24亿元。
如何增进水上交通安全已成为一项重要课题。
2006年8月16日,国务院审议并通过了《全国沿海港口布局规划》,标志着中国沿海港口建设与发展进入了新的发展阶段。
港口与航路是水上交通系统中彼此独立而又密切联系的两个关键要素。
每一通航水域中的航路是船舶进出该通航水域中各港口的通道。
沿海港口布局需要科学合理的规划,沿海通航水域的航路同样需要科学合理的规划,因为沿海通航水域中的航路是船舶顺利进出沿海港口的安全保障。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4、遗传算子 NSGA-II算法遗传操作包括3个基本遗传算子:选 择、交叉和变异,考虑到改航路径的可行性,本文 又增加了删除算子。 (1)选择。对种群 pt 的选择操作过程如下:首先,对 pt 进行非劣排序,并计算各染色体的拥挤度 s(j)(j=1,2,…,N),设个体j的排名为m(j),那么其适应 度 fGA ( j ) 通过式(3)计算得出。然后,采用期望值法 确定被选择的个体,选择操作后群体规模仍为N。
现状
影响航线飞行安全和导致航班延误 的首要原因是航空危险天气,主要为 雷暴、飑线、龙卷和风切变等中小 尺度天气系统。当某些空域或航路 受危险天气影响而无法正常使用时, 实施改航飞行可有效解决这一问题, 即安排航班临时选择一条不受影响 的航线绕过飞行受限区域。
根据航空危险天气区域的形状及分布特点, 危险天气区域可分为3类: ①块状危险天气区域,即单个的危险天 气区域,且边界连续,呈非狭长状的多边形; ②带状分布危险天气区域,即单个的危 险天气区域,且边界连续,呈狭长状多边形, 或多个危险天气区域沿航线两侧呈狭长状 分布; ③散点状分布危险天气区域,即多个小 尺度危险天气区域,沿航线两侧无规则地 分布。
(3)变异。采用基本变异操作。在满足变异概率 pm 的前提下,随机挑选一个个体,改变其某一基因位 的编码。同时,判断新生成的个体所代表的改航 路径是否满足环境模型网格划设的限制,若满足 则进入下一步操作;否则,实施删除操作,并重新进 行变异产生新的个体 为了满足NSGA-II算法对于解的多样性的要求,此 处变异概率 pm =0· 1。 (4)删除。对于初始种群和交叉、变异操作后生 成的非法个体,即超出网格范围的改航路径,实施 删除操作,并重新生成新的个体。
改航环境模型
1、网格划分 出于飞行安全因素考虑,航班改航通常从侧向绕过 危险天气区域。因此,航路点、改航点、危险天气 区域等改航相关要素均可在二维空间内进行描述 即不考虑高度信息。针对需要改航飞行的航班,在 其受影响的航段区域进行网格的定义和划分。 改航航班F的计划航线由航路点 f1, f 2 ,, fi ,, f N f 组成。起飞机场为 f 0 ,着陆机场为 f N f 1。沿航线 方向,由两个或两个以上航路点构成的线段或折线 为航段。若航路点 f i 与 f k(i k N f ) 间存在 散点状分布的危险天气区域,如图1阴影部分所示 (航线不得穿越该区域飞行),则在 f i 与 f k 之间建立 矩形网格区域。定义 f i 为改航航段的起始点 q0
NSGA-II算法在NSGA算法基础上作了 针对性的改进,其算法流程如图2所示,为 了使各代种群中的改航路径均可行,本文 引入了删除算子。
初始种群规模是遗传算法的首要控制参 数,种群规模过小,算法容易陷入局部最优 解;种群规模过大,则算法计算量较大。 对于一般的优化问题,初始种群取值范围 通常为20~100。在目标函数比较复杂的 情况下,种群规模与染色体编码长度之比 应大于1· 5。因此,本文初始种群规模设定 为80。 算法的终止条件可通过满足适应度值或 最大进化代数来实现。本文采用后者,设 最大进化代数为100。
j ,i j ,i j ,i
转弯点个数 N P ( j )为改航航段中除点 q0 和 q f 外,在点 Pg 处航向改变点的数量,如图1 中改航路径的转弯点数量为4,分别为 点 Pg , Pg , Pg 和 Pg ,即点 r ~ r4 。 1
j ,i j,2 j ,9 j ,10 j ,1 5
3、NSGA-II算法流程 应用遗传算法解决多目标规划问题可大致分为 两类:基于权重法的多目标遗传算法和基于非劣 解集(Pareto最优解集)的多目标遗传算法。前 者每次只能得到一个最优解,且该解的优劣严重 依赖于算法设计者的专业知识,即权重的设定具 有一定的局限性,其算法过程与单目标遗传算法 类似。而基于非劣解集的多目标遗传算法一次 运算可得到多个均匀分布的Pareto最优解,且无 需先验知识,适合在不同航路结构和不断变化的 天气形势下快速做出决策。NSGA-II算法为其 中最具代表性的算法,该算法在搜索效率和搜索 结果上均具有一定优势,且具有较好的稳健性。
从当前网格中心飞至下一网格中心。如图1 中,改航路径为 f i r r2 r3 r4 f k 1 r1 ~ r4 为改航转弯点,其染色体编码为 221111111211111。
目标函数 在考虑改航飞行中空中交通管制程序和航空器飞 行性能等因素下,选取具有代表性的3个目标函数, 分别为改航航段的航段距离D、平均偏离距离H和 转弯点个数 N P 。除改航航段起始点 q0 外,设个体 j(j=1,2,…,N,N为种群规模)代表的改航路径所穿越 的各网格中心点为 Pg j ,i (i=1,2,…,Gx -1),航段距离 D(j)和平均偏离距离H(j)的计算公式为
散点状分布危险天气区域下的航 班改航路径规划
文章来源及参考文献: [1]李雄,徐肖豪,赵嶷飞,等.散点状分布危 险天气区域下的航班改航路径规划[J].航 空学报,2009,30(12):2342-2347. [2]李雄,徐肖豪,朱承元,等.基于几何算法 的空中交通改航路径规划研究[J].系统工 程, 2008, 26(8): 37-40. [3]宋柯.空中交通流量管理改航策略初步 研究[D].南京:南京航空航天大学, 2002.
仿真研究
中国西南大部分地区为雷暴多发地区,以昆明— 广州航线为例,验证当该航线受散点状分布危险 天气影响时,采用本文所提方法实施改航飞行的 有效性,并与应用多边形算法规划的改航路径作 了对比分析 昆明—广州航线所经航路点为:昆明(KMG)— 泸西(LXI)—MEPAN—百色(BSE)—……—广 州(CAN)。航空气象部门预测未来Ts(Ts=2)小 时内LXI—BSE航段有雷暴,需进行改航飞行才 能避开该雷暴区域,其雷达回波≥41 dBZ的区域 如图3中阴影部分所示。在航路点LXI和BSE间 划设网格区域,网格数量为14×11,L=20 km。 LXI—BSE航段的距离为304 km,计划平均偏离 距离0 km,计划转弯点0个。
式中:d( q0 , Pg j ,i ,1)为点 q0 至点 Pg j ,i ,1的直线距离, 同理d( Pg j ,i , Pg j ,i1 )和d( Pg j ,G -1 , q f )亦表示两点间 x 的直线距离;h( Pg )为点 Pg 到直线 q0 q f 的距 j ,i j ,i 离;h′( q)为航段 Pg j ,Gx -1 q 的航线偏离距离,其计 f f qg 算方法为从 起在 qg q f 上每间隔L距离,做 q0 q f 的垂线与 Pg q f 相交所得垂线段距离 j ,G x -1 的总和; N G为改航航段的起始点与终结点间距离 / 与L的比值取整,即 NG d(q0 , q f ) L ;w ( pg ) 为考虑避让危险天气区域下的罚函数,若点 Pg j ,i 在危险区域内, w ( pg ) =1,反之 w ( pg ) =0;Mf 为一足够大的正数。因此,H(j)为改航路径与改 航航段起始点 q0 和终结点 q f 所在直线段相比, 每间隔L距离的平均偏离距离。
2、散点状分布危险天气区域的描述 由航空气象部门根据卫星云图和雷达回 波图预测的危险天气区域每隔Ts小时更 新一次,在某一Ts界定的时段内设危险天 气区域的边界固定不变。 危险天气区域覆盖的范围,即雷达回波强 度大于41 dBZ的区域,其划设原则为凡与 危险天气区域相交或重叠的网格区域均 以阴影表示,新规划的改航路径不得穿越 阴影区域飞行。
1 2 3 4
摘要 现状
论文要点
结论
摘要
针对沿航线散点状分布的危险天气区域影响下 的航班改航问题,提出了基于多目标遗传算法 (MOGA)的航路再寻径方法。首先建立了基于网 格的改航环境模型,并给出散点状分布危险天气 区域的描述方法。然后以改航航段的航段距离、 平均偏离距离和转弯点个数为目标,应用带精英 保留策略的非支配排序遗传算法(NSGA-II)对改 航路径规划进行研究,提出了适用于再寻径规划 的编码方法,同时引入了删除算子。最后,给出实 例,并与基于多边形的改航路径规划算法作了 比较,并对结果进行了分析。
f k为改航航段的终结点 q f 。网格的纵轴和横轴分 别与 q0 q f 垂直和平行,横轴的起点从航路点 f i
一侧开始至危险天气的边界结束,结束点记为 q g ,整个矩形网格区域应覆盖航段两侧的危险天气 区域。 划分的网格为边长L的正方形,以q0 q f 为中轴对称 分布,根据危险天气的几何尺度,L通常取10 km、15 km或20 km等。然后,对上述网格进行编号,沿横轴 航向从下至上依次编码,其中纵轴方向网格数量应 为奇数。设横轴网格数为纵 Gx ,轴网格为Gy ,网 格总数量为 GxGy ,例如图1中网格数量为16×13, 其编号依次为0, 1,…, 207。
在中国南方地区夏季经常出现的热雷暴 即属于该类散点状分布的危险天气,对夏 季航空运输影响极大。因此,本文根据散 点状分布危险天气区域的特点,建立了基 于网格的改航环境模型,然后以改航航段 的航段距离、平均偏离距离和转弯点个 数为目标,运用非支配排序遗传算法 (NSGA-II)对改航路径进行规划,最后以 中国西南雷暴多发地区的改航问题为例 验证该方法的有效性。
Байду номын сангаас
1、改航路径编码方法 根据危险天气模型中横轴网格的数量确定 染色体的位数,当横轴方向网格数为 Gx 时, 染色体位数为 Gx -1 ,如图1中,横轴方向网 格数量为16,染色体位数为15。雷达管制 条件下,出于航路飞行安全因素考虑,在绕 飞危险天气区域时航向的最大改变量通常 小于90°。因此,各基因位采用3进制编 码,0,1和2分别表示航班以顺时针方向航向 与网格横轴成夹角-45°,0°和45°
基于多目标遗传算法的改航路径规划
航班改航路径规划本质上是一个具有多重性能 指标的完全多项式非确定性问题,即NP完全问题, 难以求得精确解。在网格环境模型中,顶点数量 为 Gx Gy个,两点之间的连线更是多达 Gx Gy Gx Gy -1) /2 条,若采用传统的Dijkstra ( 算法、A*算法或图搜索算法等求解效率较低且 不利于解决多目标优化问题,而遗传算法则可以 有效地解决上述问题,且已被广泛应用于路径搜 索和优化中。因此本文选取多目标遗传算法中 具有代表性的NSGA-II算法对改航路径进行规 划,同时引入删除算子。