iMEMS Universal Motherboard Schematic File
宇宙科学潮汐锁定的英语范文
宇宙科学潮汐锁定的英语范文Title: The Intriguing Phenomenon of Tidal Locking in the Cosmos.Tidal locking, a fascinating astrophysical process, occurs when one celestial body in a binary system synchronizes its rotation rate with the orbital motion of its companion. This alignment results in a state where the same face of the tidally locked body always faces its partner, creating a unique and often breathtaking view of the cosmos. In this article, we delve into the science behind tidal locking, its implications for understanding our universe, and the remarkable examples we have observed throughout the cosmos.The Basics of Tidal Locking.Tidal locking, also known as synchronous rotation, occurs when the gravitational pull of one celestial body on another is strong enough to affect the rotation of thelatter. Over time, this interaction causes the rotationrate of the smaller body to slow down until it matches the orbital period of the larger body. Once this alignment is achieved, the smaller body effectively "locks" into place, with the same side always facing its companion.The mechanism behind this phenomenon can be traced to the uneven distribution of mass within the binary system.As the larger body orbits the smaller one, it creates atidal force that tugs on the smaller body's surface. This force is strongest on the side closest to the larger body, causing it to bulge slightly. Over time, the continuouspull of the larger body's gravity on this bulge slows down the rotation of the smaller body until it matches theorbital period.Implications for Understanding the Universe.Tidal locking provides valuable insights into the dynamics of binary systems and the evolution of celestial bodies. By studying these systems, astronomers can gain insights into the formation and evolution of planets, moons,and stars. For instance, tidal locking may have played a crucial role in the formation of the moon's characteristic features, such as its flat face always facing the earth.Moreover, tidal locking can also affect the atmospheres and geologies of tidally locked bodies. The constant exposure of one side to the radiation and gases of its companion can lead to unique atmospheric and geological features. This interaction can even influence the potential for life to exist on these bodies, as the constant exposure of one side to sunlight can create a habitable environment.Remarkable Examples of Tidal Locking.One of the most striking examples of tidal locking in our solar system is the moon. As the moon orbits the earth, it rotates on its axis once for every orbit, ensuring that we always see the same face of the moon. This alignment is thought to have occurred early in the moon's history, when its rotation rate was affected by the strong gravitational pull of the earth.Outside our solar system, tidal locking is even more common. Many moons of gas giants in our galaxy, such as those of Jupiter and Saturn, are tidally locked to their parent planets. This alignment creates a stunning view when observed through telescopes, with one side of the moon always illuminated, while the other remains in perpetual darkness.In addition to moons, some binary star systems also exhibit tidal locking. These systems, known as eclipsing binaries, consist of two stars orbiting each other soclosely that their gravitational pull affects theirrotation rates. As a result, the stars are locked into a synchronous rotation, with one star always facing the other.Conclusion.Tidal locking is a fascinating astrophysical phenomenon that occurs when the gravitational pull of one celestial body affects the rotation rate of its companion. This alignment creates a unique and often breathtaking view ofthe cosmos, providing valuable insights into the dynamicsof binary systems and the evolution of celestial bodies. As we continue to explore the universe, tidal locking remains an important tool for understanding the intricate dance of gravity and motion that shapes our vast and wondrous cosmos.。
智能芯片到脑子里去,英语作文
智能芯片到脑子里去,英语作文The Next Frontier: Neurobionics and the Integration of Intelligent Chips in the Human Brain.The human brain, a marvel of biological complexity, has captivated the imaginations of scientists, philosophers, and dreamers throughout history. Its intricate network of neurons, billions upon billions in number, orchestrates the symphony of our thoughts, emotions, and behaviors. For centuries, we have sought to understand the secrets thatlie within its unfathomable depths.In recent decades, technological advancements have propelled us to the cusp of a remarkable era in neuroscience. The advent of neurobionics, a field that seamlessly blends neurology with cutting-edge engineering, has opened up unprecedented possibilities for enhancing human capabilities and alleviating neurological ailments. A particularly captivating prospect within this realm is the integration of intelligent chips directly into the humanbrain.Envision a scenario where a minuscule, yet potent, microchip is implanted into the brain. This chip, equipped with sophisticated algorithms and advanced connectivity, would possess the remarkable ability to monitor neural activity in real-time, analyze patterns, and respond with targeted interventions. Such a device could revolutionize our approaches to a wide spectrum of neurological conditions.One such condition, epilepsy, characterized by recurrent seizures, affects millions worldwide. Current treatment modalities, often involving anticonvulsant medications, can be challenging to manage and may come with undesirable side effects. The integration of intelligent chips could provide a more effective and personalized approach. By monitoring brain activity continuously, the chip could detect the onset of seizures and deliver precisely timed electrical impulses or pharmacological interventions to prevent or mitigate them.Similarly, neurodegenerative diseases such as Alzheimer's and Parkinson's could potentially benefit from this technology. These debilitating conditions arise from the progressive loss of neurons, leading to cognitive impairment, movement disorders, and a decline in overall quality of life. Intelligent chips could be employed to compensate for neuronal loss by stimulating specific brain areas or intervening to slow down disease progression.The potential applications of intelligent chips in the human brain extend far beyond the realm of clinical medicine. As our understanding of neural circuits continues to expand, the possibility of augmenting human cognition and sensory perception becomes tantalizingly close. By enhancing neural processing and providing real-time feedback, chips could facilitate accelerated learning, improved memory function, and heightened sensory acuity.For instance, individuals with visual impairments could benefit from chips that amplify neural signals in thevisual cortex, enhancing their ability to perceive objects and navigate their surroundings. Similarly, chips implantedin the auditory cortex could restore hearing in those with hearing loss.The integration of intelligent chips into the human brain also presents a path towards a deeper understanding of ourselves. By providing a window into the intricate workings of the mind, chips could facilitate real-time analysis of neural activity, shedding light on the neural underpinnings of consciousness, decision-making, and emotional experiences.However, it is crucial to acknowledge that the pursuit of neurobionics comes with a myriad of ethical, social, and safety considerations that must be carefully weighed. The implantation of foreign devices into the human body raises concerns about potential risks and long-term complications. Ethical guidelines must be established to ensure that neurobionics is employed for the benefit of humanity, not to the detriment of individuals or society.As we navigate the uncharted waters of neurobionics, international collaboration and interdisciplinary researchwill be paramount. Scientists, engineers, ethicists, and policymakers must work hand-in-hand to establish clear frameworks for the responsible development and clinical application of intelligent chips in the human brain.The integration of intelligent chips into the human brain holds the promise of transformative advancements in healthcare, human enhancement, and our understanding of the human condition. By embracing a thoughtful and inclusive approach, we can harness the power of neurobionics to elevate human potential and pave the way for a brighter, more fulfilling future for all.。
外星文明猜想(英文作文)

Certainly! Here’s an essay exploring the conjectures about extraterrestrial civilizations, delving into the scientific, philosophical, and speculative aspects of the topic. Extraterrestrial Civilizations: The Great Beyond and Our Place in the CosmosThe universe, vast and ancient, stretches its arms across 93 billion light-years of observable space, containing billions of galaxies, each with billions of stars. Within this cosmic tapestry, the question of whether we are alone has captivated human minds for centuries. This essay explores the conjectures surrounding extraterrestrial civilizations, from the scientific theories to the speculative musings that fuel our imaginations.The Drake Equation: A Mathematical Framework for SpeculationAt the heart of the search for extraterrestrial intelligence (SETI) lies the Drake equation, formulated by astronomer Frank Drake in 1961. This mathematical framework attempts to estimate the number of active, communicative civilizations in the Milky Way galaxy. Variables include the rate of star formation, the fraction of stars with planetary systems, the number of planets capable of supporting life, the fraction of those planets where life actually emerges, the fraction of those life-bearing planets that develop intelligent life, the fraction of those that develop a civilization with technology, and the length of time such civilizations release detectable signals into space. While many of these variables remain unknown, the Drake equation serves as a tool for structured speculation and highlights the immense challenge in estimating the likelihood of extraterrestrial life.The Fermi Paradox: Where Are They?The Fermi paradox, named after physicist Enrico Fermi, poses a compelling question: Given the vastness of the universe and the high probability of habitable worlds, why have we not encountered any evidence of extraterrestrial civilizations? This paradox has led to numerous hypotheses. Perhaps civilizations tend to destroy themselves before achieving interstellar communication. Or, advanced civilizations might exist but choose to avoid contact with less developed species, adhering to a cosmic form of the “prime directive” seen in science fiction. Alternatively, the distances between stars could simply be too great for practical interstellar travel or communication, making detection exceedingly difficult.The Search for TechnosignaturesIn the quest for extraterrestrial intelligence, scientists have focused on detecting technosignatures—signs of technology that might indicate the presence of a civilization elsewhere in the universe. These include radio signals, laser pulses, or the dimming of stars due to megastructures like Dyson spheres. SETI projects, such as the Allen Telescope Array and Breakthrough Listen, scan the skies for anomalous signals that could be attributed to alien technology. While no definitive technosignatures have been found to date, the search continues, driven by advances in technology and a growing understanding of the cosmos.Astrobiology: Life Beyond EarthAstrobiology, the study of the origin, evolution, distribution, and future of life in the universe, offers insights into the conditions necessary for life. Research in astrobiology has revealed that life can thrive in extreme environments on Earth, suggesting that the conditions for life might be more widespread in the universe than previously thought. The discovery of exoplanets in the habitable zones of their stars, where liquid water can exist, increases the probability of finding environments suitable for life.Continued exploration of our solar system, particularly of Mars and the icy moons of Jupiter and Saturn, holds promise for uncovering signs of past or present microbial life. The Philosophical ImplicationsThe possibility of extraterrestrial civilizations raises profound philosophical questions about humanity’s place in the universe. Encountering another intelligence would force us to reevaluate our understanding of consciousness, culture, and ethics. It could lead to a new era of global unity as humanity comes together to face the challenges and opportunities of interstellar diplomacy. Conversely, it might also highlight our vulnerabilities and prompt introspection on our stewardship of the planet and our responsibilities as members of the cosmic community.Concluding ThoughtsWhile the existence of extraterrestrial civilizations remains a conjecture, the pursuit of answers has expanded our understanding of the universe and our place within it. The search for life beyond Earth is not just a scientific endeavor; it is a philosophical journey that challenges us to consider our origins, our destiny, and our role in the vast cosmic drama unfolding around us. Whether we find ourselves alone or part of a galactic community, the quest for knowledge about the universe and our place in it is one of humanity’s most enduring and inspiring pursuits.This essay explores various aspects of the conjectures surrounding extraterrestrial civilizations, from the scientific frameworks used to estimate their likelihood to the philosophical implications of their existence. If you have specific areas of interest within this broad topic, feel free to ask for further elaboration! If you have any further questions or need additional details on specific topics related to extraterrestrial life or astrobiology, please let me know!。
2014年诺贝尔物理学奖翻译
诺贝尔物理学奖翻译瑞典皇家科学院决定授予日本名城大学的Isamu Akasaki 2014诺贝尔物理学奖,以奖章其蓝色发光二极管(LED)的发明。
今年的诺贝尔奖获得者发明了一个新的节能和环保光源–蓝色发光二极管(LED)。
在诺贝尔奖精神之下有了最能造福人类的发明----LED,运用LED,白光可以以一个新的方式创造出来的。
随着LED灯的发展,我们现在有更持久、更高效的年长的光源选择。
当Isamu Akasaki,Hiroshi Amano和Shuji Nakamura在20世纪90年代早期从半导体中发现明亮的蓝色光束,他们引发了根本转变照明的技术。
虽然红色和绿色二极管已经存在了很长时间,但没有蓝色的光,白色的灯就不能被创造。
尽管经过相当大的努力,无论是在科学界和产业,蓝色LED在这三十年来仍是个挑战。
他们在其他人失败的地方成功了。
Akasak和Amano一起在名古屋大学工作,而Nakamur则被受雇在德岛县的一家小公司Nichia Chemicals。
他们的发明是革命性的。
白炽灯泡在二十世纪点亮了,而二十一世纪点亮的会是LED灯。
白色LED灯发出明亮的强烈的节能的白光。
他们不断完善,得到效率更高的光通量电输入功率。
最新的纪录是刚刚超过300流明/瓦,可比过16的普通灯泡以及接近70的荧光灯。
因为世界电力消费的四分之一用于照明,所以LED有助于节约地球资源。
与1000的白炽灯和10000荧光灯相比,每小时材料消耗也会减少持续100000个小时。
LED灯因为其低功耗,可以由当地廉价的太阳能电源供电的特点,对超过1500000000的缺少电力网格的人提高生活质量有很大希望蓝色LED的发明也只有二十年的历史,但它已经开启了一种全新的方式来创造出白色的光,为我们所有人带来了利益。
诺贝人物介绍:Isamu,Akasaki,日本公民。
于1929年出生在日本览町。
名古屋名城大学,氮化物半导体研究中心主任教授,及名古屋大学的著名教授。
THE WORKING PRINCIPLE OF CMOS DEVICES

THE WORKING PRINCIPLE OF CMOS DEVICESCMOS devices are widely used in integrated circuits. Their working principle is based on the working principle of metal-oxide semiconductor field-effect transistors (MOSFETs). CMOS devices consist of a pair of complementary MOSFETs, including N-type MOSFETs and P-type MOSFETs, which control the conduction state of the two MOSFETs to achieve current control and signal amplification.The working principle of CMOS devices can be divided into three stages: the on stage, the off stage, and the switching stage.In the conduction stage, when the input signal is high, the N-type MOSFET is on and the P-type MOSFET is off. The current flows from the power supply through the N-type MOSFET to the output terminal, forming a high-level output. When the input signal is low, the N-type MOSFET is off and the P-type MOSFET is on. The current flows from the output terminal through the P-type MOSFET to the power supply, forming a low-level output. By controlling the high and low levels of the input signal, the output signal can be controlled.In the off-stage, when the input signal is high, the N-type MOSFET is turned off and the P-type MOSFET is turned on, and the current flows from the output terminal to the power supply, forming a low-level output. When the input signal is low, the N-type MOSFET is turned on and the P-type MOSFET is turned off, and the current flows from the power supply to the output terminal, forming a high-level output. Due to the complementary structure of CMOS devices, low-level and high-level outputs can be achieved.In the switching stage, when the input signal switches from low level to high level, the N-type MOSFET switches from off state to on state, and the P-type MOSFET switches from on state to off state. This switching process requires a certain amount of time, known as the rise time. Similarly, when the input signal switches from high level to low level, the N-type MOSFET and P-type MOSFET also need to switch states, which also requires a certain amount of time, known as the fall time. The speed of switching affects the performance of CMOS devices.The working principle of CMOS devices is based on the working principle of MOSFETs. MOSFETs are a three-layer structure transistor consisting of a source, a drain, and a gate. When a positive voltage is applied to the gate, an electric field is formed, changing the charge density inthe channel and controlling the current between the source and drain. In N-type MOSFETs, when a positive voltage is applied to the gate, the electron concentration in the channel increases, forming a conductive channel, and the current flows from the source to the drain. In P-type MOSFETs, when a negative voltage is applied to the gate, the hole concentration in the channel increases, forming a conductive channel, and the current flows from the drain to the source. CMOS devices control the current by controlling the gate voltage.CMOS devices have many advantages, such as low power consumption, low noise, and strong anti-interference ability. Due to the complementary structure of CMOS devices, the output level can be restored to the power supply level, improving the reliability and stability of the signal. In addition, the manufacturing process of CMOS devices is mature and the production cost is relatively low, making it suitable for the manufacture of large-scale integrated circuits.The working principle of CMOS devices is based on the working principle of MOSFETs, which controls the conduction state of N-type MOSFETs and P-type MOSFETs to achieve current control and signal amplification. CMOS devices have many advantages and are widely used in modern integrated circuits.。
National Instruments(NI)电路设计套餐版本10.0 Release Notes
RELEASE NOTESNI Circuit Design SuiteVersion 10.0These release notes contain system requirements for NI Circuit Design Suite 10.0,as well as information about product tiers, new features, documentation resources,and other changes since Multicap 9.0, Multisim 9.0, and Ultiboard 9.0.NI Circuit Design Suite includes the following familiar Electronics Workbenchsoftware products: NI Multisim, NI Ultiboard, and the NI Multisim MCU Module(formerly MultiMCU).ContentsInstalling NI Circuit Design Suite 10.0 (2)Minimum System Requirements (2)Installation Instructions (2)Product Activation (3)What’s New in NI Circuit Design Suite 10.0 (3)Mouse-Click Support for Interactive Components (3)Convergence Assistant (4)Increased Quality and Breadth of the Component Database (4)New Components from Leading Manufacturers (4)Generic Power Simulation Parts (4)Bipolar Sources (4)Graphical LCD (5)Single Symbol Representations of Standard Logic Components (5)Enhancements to Passive Components (5)Extended SPICE Modeling Capabilities (5)Parameterized SPICE models (5)Improved Support of Behavioral Sources (5)Support for BSIM 4 Parameters (6)Enhanced Data Visualization (6)Advanced Functionality of Static Probes (6)Add Traces to Grapher after Running Analyses (6)Display Initial Conditions on the Schematic (6)Current Probe Instrument (6)Enhanced Analysis Capabilities (6)Extended Language Support and File Management in the MCU Module (7)Improvements to Speed and Quality of NI Ultiboard (7)Advanced Options for Exported Data Interpolation (7)Miscellaneous Features (8)Unicode Characters (8)NI Installation and License Management (8)Product Tier Details (8)Documentation (14)Installing NI Circuit Design Suite 10.0This section describes the system requirements and installation procedures forNI Circuit Design Suite.Minimum System RequirementsTo run NI Circuit Design Suite 10.0, National Instruments recommends that yoursystem meet the following requirements:•Windows 2000 Service Pack 3 or later, or Windows XP•Pentium 4 class microprocessor or equivalent (Pentium III class minimum)•512 MB of memory (256 MB minimum)• 1.5 GB of free hard disk space (1 GB minimum)•Open GL® capable 3D graphics card recommended (SVGA resolution videoadapter with 800×600 video resolution minimum, 1024×768 or higherpreferred)•To develop custom LabVIEW based instruments for use in Multisim,LabVIEW 8.0.x or higher is requiredInstallation InstructionsThe NI Circuit Design Suite 10.0 installer installs all products in the suite:Multisim, Ultiboard, and the Multisim MCU Module.National Instruments recommends that you close all open applications before youinstall NI Circuit Design Suite.Unless you specify another location during installation, the NI Circuit DesignSuite installation program copies files to <Program Files>\NationalNI Circuit Design Suite Release Instruments\Circuit Design Suite10.0 after you complete thefollowing steps:1.Insert the NI Circuit Design Suite CD into the CD-ROM drive. If the CDstartup screen is not visible, select Run from the Windows Start menu and runsetup.exe from your CD.2.Follow the instructions in the dialog boxes.Product ActivationWhen you run a product in the NI Circuit Design Suite for the first time, it willprompt you to activate a license for that product.Note: To run the Multisim MCU Module, place a component from the MCUModule group on a Multisim circuit or open a Multisim file that contains acomponent from the MCU Module group.If you do not activate a valid license, the product will run in Evaluation Mode andcontinue to prompt you to activate a license on each subsequent run. EvaluationMode is valid for 30 days following the first run of the product.For information about how to activate your software product, please refer to theActivation Instructions for National Instruments Products Note to Users includedwith your NI Circuit Design Suite 10.0 package.What’s New in NI Circuit Design Suite 10.0This document describes the following new features ofNI Circuit Design Suite 10.0:•Mouse-Click Support for Interactive Parts•Convergence Assistant•Increased Quality and Breadth of the Component Database•Extended SPICE Modeling Capabilities•Enhanced Data Visualization•Extended Analysis Capabilities•Extended Programming and File Management in the MCU Module•Improvements to Speed and Quality of NI Ultiboard•Advanced Options for Exported Data Interpolation•Miscellaneous FeaturesMouse-Click Support for Interactive ComponentsNI Multisim 10.0 lets you use your mouse to control interactive componentsduring simulation. You can click on switches to toggle them, push keypad buttonswith the mouse, and adjust the value of the variable components, such asNational Instruments Corporation3NI Circuit Design Suite Release Notespotentiometers, with a slider bar. You may also continue to use keyboard controlsfor these devices.Convergence AssistantThe Convergence Assistant adjusts simulation settings when a "Time Step TooSmall" error occurs during interactive simulation. The assistant adjusts theminimum number of parameters required in order to allow convergence of thesimulation. The assistant adjusts the following parameters:1.Initial Condition2.TMAX3.RELTOL4.RSHUNT5.ITL16.Integration method7.GMINIncreased Quality and Breadth of the Component DatabaseNI Multisim 10.0 has a number of new additions and improvements to thecomponent database. These include: around 1,000 new components from leadingmanufacturers, generic power simulation parts, new bipolar sources, a GraphicalLCD, single symbol representations of standard logic components, andimprovements to passive components.New Components from Leading ManufacturersNI Multisim 10.0 has approximately 1,000 new components with models fromAnalog Devices, Texas Instruments, and Linear Technologies. These additionsinclude symbols, models, and IPC-standard landpatterns. Components includeoperational-amplifier, comparator, and voltage reference models.Generic Power Simulation PartsNI Multisim 10.0 includes models for all power simulation parts found in the"Switch-Mode Power Supply SPICE Cookbook" by Christophe Basso. Thesecomponents include Buck, Boost, Buck-Boost, and PWM controllers. Theirmodels include voltage and current mode controlled devices, and models foraverage and detailed transient operation.Bipolar SourcesNew bipolar pulse sources include both current and voltage sources.NI Circuit Design Suite Release Graphical LCDA Graphical LCD is available for users who purchase the MCU Module inconjunction with NI Multisim. The command system for the Graphical LCDfollows the Toshiba T6963C. The graphical LCD is a two-color device with 256 x256 pixel display resolution. This device supports three modes of operation:text-only, graphics-only, and mixed text and graphics.Single Symbol Representations of Standard LogicComponentsIn addition to the multi-section component representation of standard logiccomponents such as logic gates and flip-flops, the component database nowincludes single symbol representations of common components. Thesesingle-symbol representations show the power and ground pins of these devices.Enhancements to Passive ComponentsYou can now change the value of any resistor, capacitor, or inductor placed on theschematic without replacing it. You can also assign a landpattern to any passivecomponent. You can assign information about the type of component, for instancemetal-oxide, and this information propagates to the Bill of Materials. Thetolerance of the components is automatically available for Monte-Carlo and WorstCase analyses, and you can edit the tolerances in the spreadsheet.An advanced non-linear inductor model lets you define the inductor characteristicsbased on datasheet values.Extended SPICE Modeling CapabilitiesNI Multisim 10.0 introduces enhancements to its SPICE modeling capabilities,including parameters in SPICE subcircuit models, improved support of behavioralsources, and support for BSIM 4 parameters.Parameterized SPICE modelsYou may now define parameters in the .subcircuit line of SPICE macro-models inNI Multisim. The definition of parameters is as follows..subckt<subckt_name><node_list>PARAMS:param_name=value,...You may then use the parameter name in place of a value in the macro-model. Thevalue of the parameter is editable in the component dialog on the schematic.Improved Support of Behavioral SourcesBehavioral sources now support nested instances of IF statements.National Instruments Corporation5NI Circuit Design Suite Release NotesSupport for BSIM 4 ParametersNI Multisim 10.0 supports the standard BSIM 4 parameters for MOSFET models.BSIM 4 supports up to 400 parameters. More information about BSIM 4 isavailable at /~bsim3/bsim4.html.Enhanced Data VisualizationNI Multisim 10.0 includes a number of improvements to the way you configureand view results. These include: advanced functionality of the static probes, theability to add traces to the Grapher after running a simulation, the ability to displaythe initial conditions of components on the schematic, a current probe instrument,and improvements to the memory and register displays of MCUs.Advanced Functionality of Static ProbesPlaced (static) probes now include a reference designator, which allows you toselect another probe as a reference net. In previous versions of NI Multisim, allprobes referenced ground. You can also use probe reference designators to selectwhich traces to view in analyses.Add Traces to Grapher after Running AnalysesYou can add traces to the Grapher view after running an analysis, and select whattype of data you want NI Multisim to store.Display Initial Conditions on the SchematicYou can choose to display the initial conditions of capacitors and inductors on theschematic.Current Probe InstrumentThe current probe instrument is a virtual representation of a real current probe thatconnects to an oscilloscope. You connect one end of the probe to a net on theschematic and the other to the input to an oscilloscope. You can set the ratio ofamps to volts displayed on the instrument. Note that the units remain in volts onthe oscilloscope.Enhanced Analysis CapabilitiesNI Multisim 10.0 now allows you to evaluate more expressions before and afterrunning analyses. The definitions of the expressions are:1.avg(X) — Running average of the vector X2.avg(X, d) — Running average of the vector X over dNI Circuit Design Suite Release 3.envmax(X, n) — Upper envelope of the vector X where n is the number ofpoints on either side of a peak that must be less than the value for a peak to beidentified4.envmin(X, n) — Lower envelope of the vector X where n is the number ofpoints on either side of a peak that must be less than the value for a peak to beidentified5.grpdelay(X) — Group delay of X with results in seconds6.rms(X) — Running RMS average of vector X7.integral(X) — Running integral of vector X8.sgn(X) — The sign or signum of a real number. It is -1 for a negative number,0 for the number zero, and 1 for a positive number.Extended Language Support and File Management in the MCU ModuleThe MCU Module, formerly MultiMCU, supports C-code in addition to Assemblylanguage. It has a code manager that lets you use multiple files to define theoperation of the microcontrollers in the design. You can have header files and uselibraries. You can also load in externally assembled binary files and view them indisassembled format.Improvements to Speed and Quality of NI UltiboardNI Ultiboard 10.0 contains enhancements to the quality of the product that includeimprovements to the speed of trace-placment and the ability to select whether ornot to plate through-holes. Exported Gerber files do not contain mosaics in thepolygons. Quality improvements in the landpatterns include: pin mappings fromsymbols to IC pin-outs and landpattern shapes and sizes in the database. All newlandpatterns follow IPC standards.Advanced Options for Exported Data InterpolationWhen exporting simulation data from NI Multisim to other NI data formats suchas LVM or TDM files, you can choose the interpolation technique that best suitsthe signal. You can also control the interpolation method used when sendingsimulation data to NI LabVIEW based instruments running inside of NI Multisim.The interpolation methods include:•Coerce•Linear Interpolation•Spline InterpolationNational Instruments Corporation7NI Circuit Design Suite Release NotesMiscellaneous FeaturesSome of the other features added to the new suite include Unicode charactersupport and NI installation and license management.Unicode CharactersAll products in NI Circuit Design Suite 10.0 support Unicode characters. Thisfeature allows you to use Cyrillic and Asian fonts inside the products.NI Installation and License ManagementAll products in NI Circuit Design Suite adhere to the standard method used toinstall and activate National Instruments software. You can activate the softwareautomatically via the internet, or manually via a web browser, phone call, oremail.Product Tier DetailsThe following lists the schematic capture functionality available in MultisimStudent and Education editions:Functionality Student EducationCustomizable GUI X XScreen-capture utility X XComments on schematic X XCircuit annotations X XModeless part placement and wiring X XFast retrieval parts bins X XAuto and manual wiring X XVirtual wiring by node name X XRubber banding on part move X XFast auto-connect passives X XSubcircuits X X3-dimensional breadboarding X XVirtual NI ELVIS X XEmbedded questions - view and respond X XNI Circuit Design Suite Release Functionality Student EducationForward/Back annotation with Ultiboard X XCross-probing with Ultiboard X XBus-vector connect XSpreadsheet view XDesign constraints for layout XAdvanced search XZoom to selected part XCorporate database XUser defined fields XXSave components to database fromworkspaceMultiple circuits open XEmbedded questions - create and edit XElectrical rules check XGraphically mark no-connect pins XHierarchical designs XMultisheet designs XProject manager XReports - including bill of materials XPin and gate swap XExport to Mentor PADS layout XDevice library Partial CompleteMaximum components in design50UnlimitedNational Instruments Corporation9NI Circuit Design Suite Release NotesThe following lists the simulation functionality available in Multisim Student andEducation editions:Functionality Student EducationInteractive simulation X XFully mixed-mode A/D simulation X XStandard SPICE 3X5/XSPICE X XEnhanced model support X XPSPICE model simulation* X XSpeed/Accuracy tradeoffs X XSimulation advisor X XConvergence assistant X XVirtual, interactive, animated parts X XMouse click support for interactive parts X XRated components X XInsert faults into components X XMeasurement Probes X XComponent Wizard X XNI measurement data file sources X XNI measurement data file export X XX XNI LabVIEW VIs as instruments andsourcesMicrophone & speaker X XCircuit restrictions X XGrapher & Postprocessor X XRF design kit X XCircuit wizards XC-Code modeling XDescription box synced with simulation XLadder diagrams/components XModel makers XNI Circuit Design Suite Release Load and save simulation profiles XVirtual Instruments 2222Analyses1018Co-simulation of MCUs Add On Add On* Does not support all PSpice syntaxThe following lists the layout functionality available in Ultiboard Student andEducation editions:Functionality Student EducationPush and Shove trace placement X XReal-time & from copper ratsnest X XReal-time polygon update with voiding X XForward/Backward annotation X XCross-probing with Multisim X XReal-time DRC X X64 layers and 1 nanometer resolution X XComprehensive Footprint Wizard X XEnhanced 3D visualization with print X XUser annotations X XFull screen mode XGerber, DXF, IPC-D-356A, SVG output XDimensions on PCB and Landpatterns XDimensions in Database Manager XNet bridges X3D visualization inside circuit board XTurn off ratsnest for selected nets XGridless follow-me placement XLoad and save technology files XPolar Grids XNational Instruments Corporation11NI Circuit Design Suite Release NotesCustomizable layer viewing XSplit power-planes XKeep-in/Keep-out areas XPlace components in array XUnplace all components XRuler bar alignments and measurements XAuto-alignment XSave PCB Design as a component XPermanent grouping XPin & gate swapping XMultiple clearances XJump to Error XEquispace trace support XDifferential Impedance Calculator XTransmission Line Calculator XMicrovias XTest point insertion XAutomatic tear-dropping XPin necked trace support XAutomatic jumper insertion XCopy Route & Replica Place functions XIn-place footprint editor XMechanical CAD XExport 3D info in 3D IGES, DXF formats XCopper amount report XTest point report XCustomization of report generation XMultiple open documents XNI Circuit Design Suite Release National Instruments Corporation 13NI Circuit Design Suite Release NotesThe following lists the autorouting functionality available in Ultiboard Student and Education editions:Number of pins supported 3501,000Spreadsheet viewLimitedCompleteFunctionalityStudentEducationFully customizable cost factors X X Progressive Routing X X Interactive autorouting X X Constraint driven routingX X Manual pre-placement: components, vias, tracesX X Auto Block Capacitor recognition X X SMD mirroring X X Trace rubberbandingX X Follows keep-in/keep-out criteria X X Pin number limit3501,000Maximum number of layers24DocumentationNI Circuit Design Suite 10.0 includes a complete documentation set featuringprinted and electronic resources for your reference.The following printed and electronic resource is available:•Getting Started with NI Circuit Design Suite GuideThe following electronic resources are available in PDF files:•Multisim User Guide•Multisim Component Reference Guide•Multisim for Educators Guide•Multisim MCU Module User Guide•Ultiboard User GuideTo access the User Guides, select Start > All Programs > National Instruments >Circuit Design Suite 10.0 > Documentation and then select the file of interest.The following online help files are available from the installed software Helpmenu and from the Start Menu:•Multisim Education Edition Help File•Ultiboard Help FileTo access the Help Files, select Start > All Programs > National Instruments >Circuit Design Suite 10.0 > Documentation and then select the file of interest.The following online help files are available from the installed software Helpmenu:•Component Reference Education Edition Help File•Multisim Symbol Editor Help File•Multisim Title Block Editor Help FileNI Circuit Design Suite Release National Instruments, NI, , and LabVIEW are trademarks of National Instruments Corporation.Refer to the Terms of Use section on /legal for more information about National Instrumentstrademarks. Ultiboard is a registered trademark and Multisim and Electronics Workbench aretrademarks of Electronics Workbench. Other product and company names mentioned herein aretrademarks or trade names of their respective companies.374480A-01 Jan07© 2007 National Instruments Corp. All rights reserved.。
MP-A微处理器 系统板说明书
Assembly Instructions MP-A Microprocessor/System BoardIntroductionThe MP-A board is the primary logic board for the system. It is a 5 1/2” x 9" double sided plated thru hole circuit board containing the 6800 microprocessor chip, the 6830 ROM which stores the Mini-Operating system and the 6810 128 byte scratch pad memory for the ROM. There is a crystal controlled processor clockdriver and baud rate generator providing serial interface baud rates of 110, 150, 300, 600 and 1200 baud for all but the control interface which is operable at 110or 300 baud. The board also contains a power up/manual reset circuit which loadsthe ROM stored operating system when activated. Full I/0 buffering is provided for the 16 address lines and 8 bi-directional data lines with those and other interconnections made to the rest of the system thru a fifty pin connector the mother board (MP-B). +5 volt power for the board is supplied by an on board +5 volt regulator with heatsink at a total current consumption of 0.8 A typical.When the SWTPC 6800 Computer System is being assembled, work on only one board at a time. Each of the system's boards and their associated parts must not be intermixed to avoid confusion during assembly. The MOS integrated circuit supplied with this kit is susceptible to static electricity damage and for this reason has been packed with its leads impressed onto a special conductive foam or possibly wrapped in a conductive foil. In either case, do not remove the protective material until specifically told to do so later in the instructions.PC Board AssemblyNOTE: Since all of the holes on the PC board have been plated thru, it isonly necessary to solder the components from the bottom side of the board. The plating provides the electrical connection from the "BOTTOM" to the "TOP" foil of each hold. Unless otherwise noted it is important that none of the connections be soldered until all of the components of each group have been installed on the board. This makes it much easier to interchange components if a mistake is made during assembly. Be sure to use a low wattage iron (not a gun) with a small tip. Do not use acid core solder or any type of paste flux. We will not guarantee or repair any kit on which either product has been used. Use only the solder supplied withthe kit or a 60/40 alloy resin core equivalent. Remember all of the connections are soldered on the bottom side of the board only. The plated-thru holes provide the electrical connections to the top foil.( ) Before installing any parts on the circuit board, check both sides of the board over carefully for incomplete etching and foil "bridges" or "breaks".It is unlikely that you will find any but should there be one especially on the "TOP" side of the board it will be very hard to locate and correct after all of the components have been installed on the board.( ) Attach the resistors to the board. As with all other components, unless noted, use the parts list and component layout drawing to locate each partand install from the "TOP" side of the board bending the leads along the"BOTTOM" side of the board and trimming so that 1/16" to 1/8" of wireremains. Solder. You should have one lM ohm resistor left over.( ) Install all of the capacitors on the board. Be sure to orient the electrolytic capacitors correctly. The polarity is indicated on the component layout drawing. Solder.( ) Install the transistors on the board. The transistors must be turned to match the outlines on the component Layout drawing. Solder.( ) Attach crystal XTAL1 to the circuit board. It should be oriented so its length lies flat across the circuit board as shown in the outline on thecomponent layout drawing. If the crystal has long thin wire leads, they may be bent down 90 degrees at the base of the crystal so they fit into the two holes provided for the crystal on the circuit board. If the crystal has short heave wire leads, solder onto and at a 90 degree angle, the crystal's leads some heavy buss wire. The buss wire with the crystal attached may then heinserted into the board. In either case the crystal must be attached so its metal case could never inadvertently come into contact with either the foil on the circuit board or either one of its own two leads. Solder.( ) Starting from one end of the circuit board install each of the five, 10 pin Molex female edge connectors along; the lower edge of the board. Theseconnectors must he inserted from the "TOP" side of the board and must bepressed down firmly against the hoard. Make sure the body of the connectorseats firmly against the circuit board and that each pin extends completely into the holes on the circuit boars. Not being careful here will cause theboard to either wobble and/or he crooked when plugged onto the mother board.It is suggested that you solder only the two end pins of each of the fiveconnectors until all have been installed at which time if everything looksstraight and rigid you should solder the as yet unsoldered pins.( ) Insert the small nylon indexing plug into the edge connector pin indicated by the small triangular arrow on the "BOTTOM" side of the circuit board. Thisprevents the board from being accidentally plugged onto the mother boardincorrectly.( ) Install integrated circuits IC5 thru IC16 and IC18 thru IC20 on the circuit board. As each one is installed make sure it is down firmly against the board and solder only two of the leads to hold the pack in place while the otherIC’s are being inserted. Be very careful to install each in its correctposition. Do not bend the leads on the back side of the board. Doing so makes it very difficult to remove the integrated circuits should replacement ever be necessary. The semi-circle notch, dot or bar on the end of the package is used for orientation purposes and must match with the outlines shown on the component layout drawing for each of the IC's. After inserting all of theintegrated circuits go back and solder each of the as yet unsoldered pins.( ) Install integrated circuit IC17 on the circuit board. This component must be oriented so its metal face is facing the circuit board with the small metal heatsink sandwiched between the two. The heatsink and IC are secured to the circuit board with a #4-40 x 1/4" screw, lockwasher and nut. The three leads of the integrated circuit must be bent down into each of their respectiveholes and trimmed, and the heatsink must be oriented as shown in thecomponent layout drawing. Solder.( ) Attach the two zero force integrated circuit sockets to board in the ICI and IC2 positions only. The 40 pin socket goes in the IC1 position while the 24 pin socket goes in the IC2 position. Orient each socket so the corner having the projecting tab is adjacent the pin indicated by the "dot" within theintegrated circuit outline on the component layout drawing. Solder.NOTE: MOS integrated circuits are susceptible to damage by staticelectricity. Although some degree of protection is provided internally within the integrated circuits, their cost demands the utmost in care. Before opening and/or installing any MOS integrated circuits you should ground your body and all metallic tools coming into contact with the leads, thru a 1 M ohm 1/4 watt resistor(supplied with the kit). The ground must be an "earth" ground such as a water pipe, and not the circuit board ground. As for the connection to your body, attach a clip lead to your watch or metal ID bracelet. Make absolutely sure you have the 1 Meg ohm resistor connected between you and the "earth" ground, otherwise you will be creating a dangerous shock hazard. Avoid touching the leads of the integrated circuits any more than necessary when installing them, even if you are grounded. On those MOS IC's being soldered in place, the tip of the soldering iron should be grounded as well (separately from your body ground) either with or without a 1 Meg ohm resistor. Most soldering irons having a three prong line cord plug already have a grounded tip. Static electricity should be an important consideration in cold,dry environments. It is less of a problem when it is warm and humid.( ) Install MOS integrated circuits IC3 and IC4 following the precautions given in the preceding section. As it is installed, make sure it is down firmlyagainst the board before soldering all of its leads. Do not bend the leads on the back side-of the board. Doing so makes it very difficult to remove theintegrated circuit should replacement ever be necessary. The "dot" or "notch"on the end of the package is used for orientation purposes and must matchwith that shown on the component layout drawing for the IC.( ) Working from the "TOP" side of the circuit board, fill in all of the feed thru's with molten solder. The feed-thru's are those unused holes on theboard whose internal plating connects the "TOP" and "BOTTOM" circuitconnections. Filling these feed-thru's with molten solder guarantees theintegrity of the connections and increases the current handling capability.( ) Now that all of the components have been installed on the board, double check to make sure all have been installed correctly in their proper location. ( ) Check very carefully to make sure that all connections have been soldered. It is very easy to miss some connections when soldering which can really cause some hard to find problems later during checkout. Also look for solder"bridges" and "cold" solder joints which are another common problem.This completes the assembly phase for the MP-A board. Integrated circuits ICI and IC2 should not be installed until the board goes thru a preliminary checkout detailed in the System Checkout Instructions supplied with the MP-B mother board kit. The System Checkout Instruction are used after having assembled the MP-A Microprocessor/System Board, MP-B mother board, MP-C serial, control interface, and the MP-P power supply.Since the MP-A circuit board now contains MOS devices it is susceptible to damage from severe static electrical sources. One should avoid handling the board any more than necessary and when you must, avoid touching or allowing anything to come into contact with any of the conductors on the board.How It WorksThe entire 6800 Computer System is built around IC1, the 6800 Microprocessor Unit (MPU). Most of the components within the system are used to provide the clocks, buffering and decoding necessary to interface to this integrated circuit. Complete details of the operation and specifications of IC1 are contained in the 6800 Hardware section of the System Documentation Notebook and will not be repeated here.Integrated circuit IC2 is a 1024 x 8 bit read only memory (ROM) which permanently stores the computer's mini-operating system described in the Operating System section of the System Documentation Notebook. Whenever the computer systemis first powered up or when the front panel RESET switch is depressed the computer jumps to this operating system firmware (programming stored in ROM) which gives the user terminal control. Since the mini-operating system uses only 512 words of the ROM, the upper 512 words have been disabled from access and the ROM operating system addresses have been located from E000 to E1FF inclusive.The ROM stored mini-operating requires a small amount of random access memory (RAM) for operation. It uses IC3, a 128 x 8 bit static memory. What is nice here is that a large portion of the RAM memory addresses are unassigned which means many short programs such as the diagnostics can be loaded right into the operating system RAM without using any of the large MP-M static memory cards. Complete information regarding the unassigned RAM locations is contained in the Operating System section of the System Documentation Notebook.IC4 is the crystal controlled clock/baud rate generator. It produces the five baud rate clock frequencies required by the control and serial interfaces. It also generates a clock which is divided by two by half of IC20, split into twonon-overlapping phases by IC18 and IC19 buffered by transistors Q1 thru Q4 and sent onto IC1, the MPU chip. IC14 provides the buffering for each of the used outputs on baud rate generator IC4.Timer integrated circuit IC11 is responsible for generating the power up/ manual pushbutton RESET which loads the mini-operating system stored in the ROM,IC2.Half of D flip flop, IC20 is used for timed halting of the processor indirect memory access (DMA) applications.Integrated circuits ICS, IC6 and IC7 are used as non-inverting address line buffers for each of the sixteen address lines. Integrated circuits IC8 and IC9 are inverting bi-directional transceiver buffers for the system's eight bi-directional data lines. The gates feeding the enable lines of the transceiver IC's guaranteethe appropriate receive or transmit data buss buffers are enabled at the proper time.+5 VDC power for the board is supplied by voltage regulator IC17.Parts List MP-A Microprocessor/System BoardResistorsR1, R2, R4 1M ohm 1/4 watt resistorR3, R7, R12, R13 10K ohm 1/4 watt resistorR5, R6 6.8K ohm 1/4 watt resistorR8, R9, R19 1K ohm 1/4 watt resistorR10, R11 4.7K ohm 1/4 watt resistorR14, R17 10 ohm 1/4 watt resistorR15, R16 22 ohm 1/4 watt resistorR18 470 ohm 1/4 watt resistorCapacitorsC1, C2, C4, C14, C15 0.1 mfd disc. capacitorC3 100 mfd @15 VDC electrolytic capacitor C5 0.01 mfd mylar capacitorC6 0.1 mfd mylar capacitorC7 0.47 mfd tantalum capacitorC8 1000 pF polystyrene capacitorC9, C10 33 pfd polystyrene capacitorC11, C12 120 pfd polystyrene capacitorC13 1000 pfd polystyrene capacitorSemiconductorsIC-1 MC6800 MPU (MOS)IC-2 MC6830L7 ROM (MOS)IC-3 MC6810L-1 RAM (MOS)IC-4 MC14411 Baud Rate Generator (MOS)IC-5, IC-6, IC-7 DM8097 Hex Tri-State BufferIC-8, IC9 DM8835 Quad Bi-directional Transceiver IC-10 7404 Hex InverterIC-11 555 or 1455 TimerIC-12, IC-13 7400 Quad NAND gateIC-14 74L04 HP Hex InverterIC-15 DM8098 Hex Tri-State BufferIC-16 7420 Dual 4-Input MAND GateIC-17 7805 +5 VDC Voltage RegulatorIC-18 74H00 HS Quad NAND GateIC-19 74H08 HS Quad AND GateIC-20 7474 Dual "D" Flip-FlopQ1, Q2 2N5087 transistorQ3, Q4 2N5210 transistorMisc.XTAL 1 1.7971 MHz Parallel Resonant Crystal。
英语作文-集成电路设计行业的智能芯片与系统解决方案

英语作文-集成电路设计行业的智能芯片与系统解决方案The semiconductor industry, particularly in the realm of integrated circuit (IC) design, has witnessed a remarkable evolution over the years. Among the forefront advancements lies the domain of smart chips and system solutions. In this article, we delve into the intricacies and innovations within the domain of intelligent chip design and its broader implications for the industry.Intelligent chips, often referred to as system-on-chips (SoCs), represent a fusion of hardware and software expertise aimed at delivering enhanced functionalities and performance. These chips integrate various components, including processors, memory, sensors, and interfaces, onto a single substrate, thus offering compactness and efficiency.One of the defining features of intelligent chips is their adaptability and programmability. Through sophisticated algorithms and firmware, these chips can dynamically adjust their behavior based on environmental conditions, user inputs, and other stimuli. This adaptability is particularly crucial in applications such as IoT devices, automotive electronics, and consumer electronics, where flexibility and responsiveness are paramount.Moreover, intelligent chips boast advanced security features to safeguard sensitive data and thwart malicious attacks. Encryption, authentication mechanisms, and secure boot protocols are integrated into the chip architecture to provide robust protection against cybersecurity threats. As data privacy concerns continue to escalate, the incorporation of stringent security measures has become indispensable across various industry sectors.Furthermore, the emergence of artificial intelligence (AI) and machine learning (ML) has propelled the capabilities of intelligent chips to unprecedented heights. By embedding neural network accelerators and dedicated hardware for AI inference tasks, these chips can perform complex computations with unparalleled speed and efficiency. This pavesthe way for innovative applications such as image recognition, natural language processing, and autonomous decision-making.In addition to standalone intelligent chips, there is a growing trend towards system-level integration and co-design. This entails the seamless integration of multiple chips and subsystems to form cohesive, synergistic systems. By optimizing the interaction between different components, designers can achieve higher performance, lower power consumption, and reduced latency, thereby unlocking new possibilities in terms of functionality and user experience.The design process for intelligent chips involves a multidisciplinary approach, encompassing aspects of electrical engineering, computer science, and materials science. Designers leverage advanced tools and methodologies, including electronic design automation (EDA) software, hardware description languages (HDLs), and simulation techniques, to model, simulate, and verify the chip's functionality prior to fabrication.Furthermore, the relentless pursuit of miniaturization and energy efficiency has led to innovations in semiconductor manufacturing technologies. From FinFET transistors to advanced packaging techniques such as 3D integration and wafer-level packaging, manufacturers are continually pushing the boundaries of what is technologically feasible. These advancements not only enable higher transistor densities and faster switching speeds but also contribute to reducing the overall cost per function, thus driving widespread adoption of intelligent chips across diverse market segments.Looking ahead, the trajectory of intelligent chip design is poised to intersect with other transformative technologies such as quantum computing, neuromorphic computing, and edge computing. As the demand for compute-intensive applications continues to escalate, the role of intelligent chips as the cornerstone of next-generation electronics becomes increasingly pronounced.In conclusion, the field of intelligent chip design represents a convergence of innovation, ingenuity, and interdisciplinary collaboration. From powering the devices we use daily to driving the next wave of technological breakthroughs, these chips serve as the bedrock upon which the digital future is built. As we navigate the complexities of aninterconnected world, the quest for ever-smarter, more efficient chips will undoubtedly remain at the forefront of technological progress.。
测试与分析设备的操作手册说明书

OPERATOR’S MANUALMODEL 610 LOGIC PROBE (20MHz FREQUENCY DISPLAYABLE)MODEL 610B LOGIC PROBE WITH BEEPER TONE (20MHz FREQUENCY DISPLAYABLE)MODEL 615 LOGIC PROBE (50MHz FREQUENCY DISPLAYABLE)PULSERMODEL 620 LOGICMODEL 625 LOGIC PROBE (50MHz FREQUENCY DISPLAYABLE) & LOGIC PULSERLOGIC PROBE (Model 610. 610B. 615. 625) INTRODUCTIONThe logic Probe is ideal for troubleshooting and analysis of logic circuits. It works as a level detector,a pulse detector, a pulse stretcher, and a pulse memory (model 610 & 610B only). It features includea. Circuit powered.b. LED indicators: Hi (red LED), Lo (green LED), and PULES/MEMORY (yellow LED) (model 610 & 610B only.)c. Logic Hi; Lo; PULSER with different beeper tone (model 610B only)d. Switch-selectable pulse detection or pulse memory function (model 610 & 610B only).e., Switch-selectable TTL or CMOS circuits. (model 610 & 610B only).OPERATIONa. Attach red alligator clip to positive side of d.c, power supply of printed circuit board under test.b. Attach black alligator clip to negative side of d.c, power supply of printed circuit board under test.c. LED Display Pattern:z LED ON { LED OFF LED may or may not be on.* Blinking LED, Intensity is proportional to the duty cycle of the signal observed.Note: If model 615 & 625 Lo LED lighted, when power supply voltage is upper 10V.This is normal condition, will not effect the logic probe features.d. After the PULSE/MEMORY Switch is placed in MEM position, the Pulse indicator (yellow LED) with latch on with the first transition (either rising or falling). Thereafter, as long as the probe is powered, the LED will remain on until reset by switching to PULSE position. (610 & 610B only).SPECIFICATIONSGENERAL:Operating T emperature..................................0°C to 50°C, 80% Relative HumidityStorage T emperature......................................-20°C to 65°C, 75% Relative Humidity Weight.............................................................610 & 610B 1.6 Ounces (45g) approx.615 1.2 Ounces (35g) approx620 1.4 Ounces (40g) approx.625 1.76 Ounces (50g) approx. Dimensions.....................................................8.2 Inches (21cm) Long X.0.7 Inches (1.8cm) Wide X.0.7 Inches (1.8cm) Deep.ELECTRICAL (At 23±5°C, 75% Relative Humidity Maximum):Model 610 & 610B 615 & 625 Maximum Input Signal Frequency·········································20MHz 50MHzInput Impedance····································································1MΩ 120KΩOperating Supply Range························································4V DC Minimum, 18V DC MaximumTTL: Logic “1” (Hi LED)··············································>2.3±0.2V DC >3.0±0.25V Logic “0” (Lo LED)·············································<0.8±0.2V DC <0.75±0.25V CMOS: Logic “1” (Hi LED)··············································>70% Vcc±10% >60% Vcc±5% Logic “0” (Lo LED)·············································<30% Vcc±10% <15% Vcc±5% Minimum Detectable Pulse Width··········································30 Nanoseconds 10 Nanoseconds Maximum Signal input Protection··········································±220V AC/DC ±70V AC/DC(for 15 seconds) (for 15 seconds) Power Supply Protection························································±20V DC ±20V DCPulse Indicator Flash Time·····················································500msLOGIC PULSER (Model 620 & 625)INTRODUCTIONThe Logic Pulser is a very effective tool for inspecting and repairing the logic circuits. It can be used directly to inject a signal into the logic circuits without removing the IC or breaking the circuits. The 100mA pulse output insures that the device under test will be pulsed, while the short 10μS duration of the output pulse makes sure that no damage will be done to the circuit under test. The logic Pulser output is changeable between 0.5 and 400Hz, making it suitable for use with either a logic probe or with an oscilloscope, also has an external sync input, which enables the user to synchronize the pulse output with an external signal, such as a computer clock circuit.OPERATIONa. Attach red alligator clip to positive side of d.c, power supply of printed circuit board under test.b. Attach black alligator clip to negative side of d.c, power supply of printed circuit board under test.c. Setting the repetition rate switch to 0.5pps or 400pps.SPECIFICATIONSSync Input Impedance...................................1MΩPulse Rate.......................................................0.5/400HzPulse Width.....................................................10μSOutput Current................................................100mA sink/sourceSquare Ware Output Current.........................5mA sink/sourcePower Supply Range......................................5 – 15V DCPower Supply Protection................................20V DC (30 seconds max.)Sync Input Protection.....................................120V DC (30 seconds max.)T e st Point Protection...................................35V DC (30 seconds max.)。
全息投影手环的作文英语
全息投影手环的作文英语英文:As a tech enthusiast, I have always been fascinated by the idea of holographic technology. And when I first got my hands on a holographic projection bracelet, I wasabsolutely blown away by its capabilities. The holographic projection bracelet, or "hologram wristband" as some people call it, is a revolutionary piece of technology that hasthe potential to change the way we interact with the world around us.One of the most amazing things about the holographic projection bracelet is its ability to project 3D images and videos right onto the user's wrist. This means that you can literally have a holographic display right in front of your eyes, without the need for any bulky screens or devices. Imagine being able to watch a holographic movie or play a holographic game, all from the comfort of your own wrist.It's like something straight out of a science fiction movie!But the holographic projection bracelet isn't just about entertainment. It also has practical applicationsthat can make our lives easier and more convenient. For example, imagine being able to project a virtual keyboard onto your wrist, allowing you to type and send messages without needing a physical keyboard or touchscreen. Or imagine being able to project a map or directions right onto your wrist, making it easier to navigate and find your way around.Of course, the holographic projection bracelet is still in its early stages, and there are some limitations to its capabilities. For example, the quality of the holographic images and videos is not yet as high as traditional displays, and the battery life of the bracelet can be quite limited. However, as technology continues to advance, these limitations are likely to be overcome, and we may soon see holographic projection bracelets becoming a common and indispensable part of our daily lives.In conclusion, the holographic projection bracelet isan incredibly exciting piece of technology that has the potential to revolutionize the way we interact with the world around us. Its ability to project 3D images andvideos right onto the user's wrist is truly mind-blowing, and its practical applications are endless. I can't wait to see how this technology develops in the future, and I'm excited to be a part of the holographic revolution.中文:作为一个科技爱好者,我一直对全息技术的概念深感着迷。
Szabados猜想的一个部分回答(英文)

Szabados猜想的一个部分回答(英文)
王全龙
【期刊名称】《数学研究》
【年(卷),期】1997(30)4
【摘要】无
【总页数】1页(P364)
【作者】王全龙
【作者单位】无
【正文语种】中文
【相关文献】
1.关于Lévy过程一个公开问题的部分回答 [J], 郑静
2.关于射影正规半群的一个猜想的证明(英文) [J], 何勇
3.哥德巴赫猜想的一个等价命题(英文) [J], 王友菁;刘宗杰
4.一个关于上凸密度的公开问题的否定回答(英文) [J], 尹建东;聂饶荣;周作领
5.邻接树图是哈密尔顿图猜想的一个等价命题(英文) [J], 张兰菊
因版权原因,仅展示原文概要,查看原文内容请购买。
介绍芯片英语演讲稿范文
Ladies and gentlemen,Good morning/afternoon/evening. It is my great pleasure to stand before you today to discuss a topic that is as essential as it is fascinating: the microchip. In this speech, I will take you on a journey through the history, the impact, and the future of microchips, the tiny devices that have revolutionized our world.Introduction:Microchips, often referred to as integrated circuits, are marvels of modern technology. These compact, yet powerful devices have transformed the way we live, work, and communicate. From the smallest electronic devices to the most complex systems, microchips are the unsung heroes that make it all possible. Today, I invite you to join me as we delve into the world of microchips.I. The Birth of MicrochipsA. The ConceptualizationThe idea of an integrated circuit was first conceptualized in the 1950s by Jack Kilby, an engineer at Texas Instruments. Kilby's vision was to create a single semiconductor device that could perform multiple functions, thus reducing the size and complexity of electronic systems.B. The InventionIn 1958, Kilby successfully demonstrated the first working integrated circuit. This breakthrough marked the birth of microchips and laid the foundation for the digital age.II. The Evolution of MicrochipsA. The Early YearsIn the 1960s and 1970s, microchips began to gain traction in the consumer market. The development of microprocessors, which are essentially central processing units (CPUs) on a single chip, paved the way for the creation of personal computers.B. The Rise of Personal ComputersThe 1980s saw the rapid growth of personal computers, thanks to the increasing power and decreasing size of microchips. Companies like Intel and AMD played a crucial role in the development of microprocessors that would power these devices.C. The MiniaturizationThe 1990s and 2000s brought about the miniaturization of microchips. The introduction of nanotechnology allowed for the creation of smaller, more efficient, and more powerful chips. This led to advancements in mobile devices, such as smartphones and tablets.III. The Impact of MicrochipsA. Revolutionizing IndustriesMicrochips have had a profound impact on various industries, including telecommunications, healthcare, transportation, and entertainment. They have enabled the development of new technologies and the enhancement of existing ones.B. Improving Quality of LifeMicrochips have made our lives more convenient, efficient, and enjoyable. From the automation of everyday tasks to the ability to connect with people across the globe, microchips have become an integral part of our daily lives.C. Economic GrowthThe microchip industry has contributed significantly to economic growth. It has created millions of jobs, fostered innovation, and driven technological advancements that have far-reaching effects on the global economy.IV. The Future of MicrochipsA. Emerging TechnologiesAs we move forward, the future of microchips looks promising. Emerging technologies, such as quantum computing and artificial intelligence,will rely heavily on the development of advanced microchips.B. Environmental ConcernsWith the increasing demand for microchips, environmental concerns are also on the rise. Efforts are being made to develop more sustainable and energy-efficient chip manufacturing processes.C. Ethical ConsiderationsAs microchips become more powerful and ubiquitous, ethical considerations come into play. Questions about privacy, security, and the potential misuse of microchips need to be addressed.Conclusion:Ladies and gentlemen, microchips have come a long way since their inception. From a simple idea to a global phenomenon, these tiny devices have shaped the modern world. As we continue to innovate and push the boundaries of technology, microchips will undoubtedly play a crucialrole in our future. Let us embrace the power of microchips and use them to create a better, more connected, and more sustainable world.Thank you for your attention.。
SIMOREG DC Master卷取

sSIMOREG DC Master6RA70 SeriesApplication Center WinderMicroprocessor-Based Converters from 6kW to 1900kW for Variable-Speed DC DrivesEdition 05Edition 0512.02NOTEThis application does not purport to handle or take into account all of the equipment details or versionsor to cover every conceivable operating situation or application. If you require more detailed information, or if special problems occur, which are not handled in enough detail in this document, please contactyour local Siemens office.The contents of this application are not part of an earlier or existing agreement or legal contract and neither do they change it. The actual purchase contract represents the complete liability of the A&D Variable-Speed Drives Group of Siemens AG. The warranty conditions, specified in the contractbetween the two parties, is the only warranty which will be accepted by the A&D Variable-Speed Drives Group. The warranty conditions specified in the contract are neither expanded nor changed by the information provided in the installation instructions.The reproduction, transmission or use of this document or contents is notpermitted without express written authority. Offenders will be liable fordamages. All rights, including rights created by patent grant orregistration of a utility model or design, are reserved.We have checked that the contents of this publication agree with thehardware and software described herein. Nonetheless, differences mightexist and therefore we cannot guarantee that they are completelyidentical. The information given in this publication is reviewed at regularintervals and any corrections that might be necessary are made in thesubsequent printings. Suggestions for improvement are welcome at alltimes.SIMOREG ® is a registered trademark of Siemens Siemens AG 2000 All rights reservedEdition 0301.01Siemens AG3-52SIMOREG DC Master Application Center winderContentsPage1Overview (5)1.1General.........................................................................................................................................51.2Application guidelines....................................................................................................................51.3Application conditions....................................................................................................................51.4Operating modes and functions (6)2Closed-loop control of a winder (7)2.1Criteria for selecting the control method........................................................................................72.2Torque limiting control...................................................................................................................82.2.1Indirect tension control..................................................................................................................82.2.2Direct tension control..................................................................................................................102.3Speed compensation control.......................................................................................................122.3.1Dancer control............................................................................................................................122.3.2v-constant control (winder)..........................................................................................................142.4Control function blocks................................................................................................................152.4.1Stop tension control....................................................................................................................152.4.2Slip core control..........................................................................................................................152.4.3Variable web width......................................................................................................................152.4.4Variable material density.............................................................................................................152.4.5Calculator for the diameter..........................................................................................................152.4.6Gearbox stage............................................................................................................................152.4.7Speed controller adaptation.........................................................................................................162.4.8Tension controller adaptation......................................................................................................162.4.9Web break recognition................................................................................................................162.5Acceleration compensation calculation........................................................................................162.5.1Determination of fixed value inertia.............................................................................................162.5.2Determination of the variable moment of inertia...........................................................................172.5.3Formulas and dimensions (17)3Interfaces (18)3.1Received data from top level control...........................................................................................183.1.1Transmit data to top level control.................................................................................................193.1.2Analog input ................................................................................................................................193.1.3Analog output..............................................................................................................................193.1.4Pulse generator input (19)4Commissioning notes (20)4.1Speed feedback adjustment ........................................................................................................204.2Compensation of friction torque...................................................................................................204.3Compensation of acceleration torque..........................................................................................214.3.1Constant moment of inertia.........................................................................................................214.3.2Variable moment of inertia...........................................................................................................214.4Optimization of speed controller..................................................................................................214.4.1Optimization at minimal diameter.................................................................................................224.4.2Optimization at maximum diameter..............................................................................................224.5Hints for setting parameters (22)Edition 0512.02Page 5Appendix (23)5.1List of freely assignable function blocks used (23)5.2List of settable fixed values used (24)5.3Detailed schematics (24)5.4Parameter list (51)4-52Siemens AGSIMOREG DC Master Application Center Winder12.02Edition 05Siemens AG5-52SIMOREG DC Master Application Center Winder1Overview1.1GeneralCenter winders are drives on which a web is either wound or unwound at a defined tension via the driven winding shaft. Center winders are used in various industrial branches such as, for example, in foil mills,printing presses, coating plants, paper processing machines (rotary cutters, glazing rollers), spoolers on wire drawing and cable machines, textile machines and sheet-metal reels.This application guide shows how to implement a center winder using the freely assignable function blocks available through the option S00. In this case, binary control commands and setpoints are input via Profibus.NOTESOwing to the number and type of function blocks required, it is absolutely essential to use software version V2.0 or higher!Since the winder can operate in the "Drive" and "Brake" modes, the DC Master 6RA70 must be configured for 4Q operation !1.2 Application guidelinesIn principle, this application is suitable for use in all the examples listed in para. 1.1. The user has the advantage that he can individually tailor the existing, highly universal application to suit his plant using BICO technology and without the need for any additional tools.Restrictions to its use may be encountered in the form of resolution problems in "maneuvering" (low speed)on fast-running machines with large winding ratios, or when the permissible limit frequency of the pulse encoder input is exceeded at V max (high speed). Please refer to the feasibility calculation in Section 11.8"Definition of pulse encoder, speed sensing with pulse encoder" of the basic unit operating guide. If the resolution is not high enough, the center winder must be implemented by means of a T400 technology board and associated standard configuration "Center winder SPW420".1.3 Application conditionsThe full range of functions described in this application document will be available for use only if the SIMOREG DC Master is controlled via a higher-level control system (e.g. SIMATIC S7) in combination with an optional interface board (CBP2) and the Profibus.If you wish to implement hardware-based converter control, you must provide (depending on requirements)CUD2 terminal expansions or supplementary board EB1 and/or EB2. In this case, you will also need to change the connections for the binary input commands and/or setpoints.Please see the relevant data sheets for the supplementary board specifications. For instructions on mounting the boards, please see Section 5.3 "Mounting options" in the operating guide.Edition 0512.021.4 Operating modes and functionsThe winder described can operate in several different modes using a variety of functions. Global settings such as♦control method♦direction of winding♦winder or unwinder♦gear box stage♦winding characteristicare selected via the top level control system. Depending on the selection, the requisite parameter settings are automatically made in the SIMOREG device. In the case of machines used to manufacture broad-web products and therefore requiring a variety of control methods, it is possible to choose between several different control modes simply by switching over control bits. There is no need to change any connector or binector links. All you need to do is select the required settings for characteristics, controllers, parameters or optimization runs.If a hardware control is implemented, the required changes can be made using OR function blocks (for details contact schematic 19).The following modes of operation are implemented:♦direct tension control with tensile force sensor♦indirect tension control without tensile force sensor using torque control♦dancer roll / compensating roll position control♦v-constant controlThe following functions are available in these modes:♦inching, maneuvering (to lead the web)♦stop tension♦slip core control♦setting of a variable web width♦setting a variable material density♦calculator for diameter with monotone or not monotone change of diameter♦ 2 gear box stages♦speed controller adaptation♦tension controller adaptation♦web break recognition6-52Siemens AGSIMOREG DC Master Application Center Winder12.02Edition 05Siemens AG7-52SIMOREG DC Master Application Center Winder2Closed-loop control of a winder2.1Criteria for selecting the control methodThe following table lists selection criteria based on empirical values.The maximum possible web velocity is dependent to a large degree on its relation to the web-lead or maneuvering velocity (see also para. 1.2 Application guidelines).Torque limiting control Speed compensation controlControl method Indirect tension control Direct tension controlDancer control v-constant controlDiameter sensing Calculated from web velocity setpoint and winder speed Calculated from web velocity setpoint and winder speed Calculated from web velocity setpoint and winder speed Calculated fromactual web velocityand winder speed Diameter ratio D max /D core Up to approx. 10:1Good compensation of acceleration torque and friction required Up to approx.15:1Good compensation of acceleration torque and friction required Up to approx. 15:1Good compensation of acceleration torque and frictionrequiredUp to approx. 15:1Actual tension sensingNo Yes No No Tension ratio F max /F min Up to approx. 6:1Good compensation of acceleration torque and friction required Up to approx. 20:1Good compensation of acceleration torque and friction requiredVariable only with variable dancerweightTorque ratio M max /M min Up to approx. 30:1Up to approx. 40:1Dependent on quality of actualtension signalWeb velocity Up to 300m/min with good compensation Up to 1000m/min with good compensation Up to 1000m/minwith good compensationUp to 1000m/min Clamping point Required Required Required Not required Web tacho Not required Not required Not required Required Use preferably for Sheet metal,textiles, paper,cabling Paper,thin foils Rubber, cabling,wire,foil, textiles(generally for extensible materials)Sorting rollerEdition 0512.022.2 Torque limiting controlThe basis for this operating principle is the addition (winder) or subtraction (unwinder) of a fixed value = override setpoint (5-10%) to/from the speed setpoint of the speed controller with active tension control and web inserted. Through its connection to the web, the winder reaches one of its torque limits (pos. limit with winder, negative limit with unwinder). The torque limit is obtained from a feedforward control value derived from the tension setpoint, taking into account diameter, friction, moment of inertia and acceleration.The ramp generator for the speed setpoint merely serves to produce the dv/dt signal (ramp-up and ramp-down time should be set to 0).2.2.1 Indirect tension controlMain drive8-52Siemens AGSIMOREG DC Master Application Center Winder12.02Edition 05Siemens AG9-52SIMOREG DC Master Application Center WinderDescription of mode of operation:Input of current diameter using "Set diameter". This can be done only when the drive is switched off.The maneuvering setpoint stretches the web between the winder and main drive (clamping point). Applying the "Tension control ON external" signal allows activation of the tension control (a minimum torque must also be reached) and the override setpoint is switched in. At the same time, the speed controller input is switched from maneuvering over to operating setpoint (winder), or to 0 (unwinder). The drive torque is adjusted to the torque limit specified by the tension control (derived from tension setpoint). A winding hardness characteristic (tension decreases in proportion to increase in diameter) can be activated as the tension setpoint for the winder.The machine can now be started.With every change in velocity, the product of moment of inertia x acceleration is added to the tension feedforward control.The current diameter is calculated continuously from the quotient of web velocity/winder speed. The tension feedforward control value is multiplied by the varying diameter, thus ensuring that the web tension remains constant.A reduced tension (=stop tension) can be injected at standstill. This is calculated as a percentage of the current operating setpoint tension.If the web breaks, the winder accelerates initially by its override setpoint, the unwinder decelerates to its override setpoint (this is negative so the unwinder rotates in the opposite direction). The web break is sensed, on the one hand, by the delayed evaluation of a minimum torque and, on the other, by a comparison of the torque setpoint and actual values. These are identical if the tension control is active because the drive is operating at its torque limit. When the web breaks, the actual torque decreases when the override speed is reached and this setpoint/actual value difference is evaluated after a delay (to allow for temporary deviations) by a limit monitor. The web velocity setpoint is canceled by the speed controller, both the winder and unwinder rotate at their override setpoint in the winding direction. OFF3 is applied after a parameterizable time period.The "Web break" signal can also be specified from an external source (e.g. via light barriers).To ensure that the specified torque produces a material tension as close as possible to the desired value,the acceleration and friction torques must be compensated accurately!Edition 0512.0210-52Siemens AGSIMOREG DC Master Application Center Winder2.2.2 Direct tension controlWinderMain drive(injection of web velocity)Tensile force sensorDescription of mode of operation:Input of current diameter using "Set diameter". This can be done only when the drive is switched off.The maneuvering setpoint stretches the web between the winder and main drive (clamping point). If the tension exceeds a minimum value within a prespecified period, the tension control is automatically activated, the override setpoint switched in and the tension controller enabled along a ramp (if "Tension controller ON external" signal is applied). At the same time, the speed controller input is switched from maneuvering over to operating setpoint. The drive torque is adjusted to the torque limit specified by the tension control (derived from tension setpoint). A winding hardness characteristic (tension decreases in proportion to increase in diameter) can be activated as the tension setpoint for the winder.The tension controller compares the actual tension with the tension setpoint and adds a corresponding compensation signal to the tension feedforward control value.The machine can now be started.With every change in velocity, the product of moment of inertia x acceleration is added to the tension feedforward control value.The current diameter is calculated continuously from the quotient of web velocity/winder speed. The sum of tension feedforward control value + tension controller output is multiplied by the varying diameter, thus ensuring that the web tension remains constant.A reduced tension (=stop tension) can be injected at standstill. This is calculated as a percentage of the current operating setpoint tension.If the web breaks, the winder accelerates by its override setpoint, the unwinder decelerates to its override setpoint (this is negative so the unwinder rotates in the opposite direction). The web break is sensed, on the one hand, by the delayed evaluation of a minimum tension and, on the other, by a comparison of the torque setpoint and actual values. When the web breaks, the actual torque decreases when the override speed is reached and this setpoint/actual value difference is evaluated after a delay (to allow for temporary deviations) by a limit monitor. The web velocity setpoint is canceled by the speed controller, both the winder and unwinder rotate at their override setpoint in the winding direction. OFF3 is applied after a parameterizable time period.The "Web break" signal can also be specified from an external source (e.g. via light barriers).12-52Siemens AG2.3Speed compensation control2.3.1Dancer controlIn this case, a compensation value (magnitude of override 2-10%) is added to the speed controller setpoint.The drive torque limits are always open.Every time the velocity changes, the product of moment of inertia x acceleration is added as a supplementary torque setpoint to the speed controller output.The ramp generator for the speed setpoint merely serves to produce the dv/dt signal (ramp-up and ramp-down time should be set to 0).DancerWinderMain drive(injection of web velocity)Description of mode of operation:Input of current diameter using "Set diameter". This can be done only when the drive is switched off.The maneuvering setpoint stretches the web between the winder and main drive (clamping point), thereby moving the dancer out of its end position. This activates the position control and enables the position controller along a ramp (if "Tension controller ON external" signal is applied); the position controller output forms the supplementary speed setpoint. The dancer moves to its center position (when position setpoint = 0). At the same time, the speed controller input is switched from the maneuvering over to the operating setpoint.The machine can now be started.The current diameter is calculated continuously from the quotient of web velocity/winder speed.The tension in the web is determined solely by the dancer weight. If a tension control function is required, the dancer must be provided with a control device (e.g. pressure cylinder). The tension setpoint is converted to a pressure setpoint in the 6RA70 and made available at an analog output. A winding hardness characteristic (tension decreases in proportion to increase in diameter) can be activated as the tension setpoint for the winder.A reduced tension (=stop tension) can be injected at standstill. This is calculated as a percentage of the current operating setpoint tension.If the web breaks, the dancer moves to its end positions. The dancer position control is disabled and the OFF3 process initiated. It is useful to delay OFF3 on the winder to allow any loose winding material to be reeled up.NOTEIt may be necessary to activate the D-action component in the actual-value channel for the position controller. This helps to dampen the dancer roller and prevents build-up of oscillation between the dancer and winder.14-52Siemens AG2.3.2 v-constant control (winder)The three control methods described above each require a clamping point on the machine, e.g. in the form of a pair of contacting rollers through which the web is fed and from which the winder receives the web velocity setpoint. If there is no clamping point on the machine, the winder must be regulated to a constant peripheral speed. This necessitates sensing the web velocity using a web tacho so that the diameter can be calculated from v/n.Since the winder is acting quasi as a "main drive" in this instance, the ramp generator must be used to ramp the speed setpoint.Web tachoWinder (v-constant)UnwinderDescription of mode of operation:Input of current diameter using "Set diameter". This can be done only when the drive is switched off.The machine can be started when the web is tensioned.Web-break sensing is not operative in v-constant control mode. If the web breaks, the web tacho signal switches to 0. The calculated diameter would then integrate in direction D min, resulting in a corresponding increase in the winder speed. To prevent this from happening, the "monotone" setting of the diameter calculator must be activated, i.e. the diameter can only increase for the winder and thus remains constant if the web breaks.NOTEWhen the v-constant control method is used, the web velocity must be measured using a web tacho. This also necessitates use of supplementary board SBP pulse encoder evaluation (second actual tacho value).2.4 Control function blocks2.4.1 Stop tension controlThe stop tension is injected as a function of the external control and the internal n=0 message. It can be parameterized as a percentage of the set operating tension. If a constant stop tension is required, parameter U151.01 must be connected to K0001.2.4.2 Slip core controlThe coil hardness influences, in conjunction with the diameter, the tension setpoint according to an adjustable characteristic. The setpoints can be taken either from an internal characteristic block or externally from the bus. Depending on the application, 5 additional characteristics are available. It is meaningful to work without the slip core control if an unwinder is used. Switching between different characteristics is implemented via external control.2.4.3 Variable web widthThe selection of different web widths is automatically taken into account for the calculation of the moment of inertia and therefore also for the resulting feedforward control torque. In this case, the maximum web width must always be assumed to be 100%. If a fixed web width is required, parameter U150.03 must be connected to K0001.2.4.4 Variable material densityThe selection of different material densities is automatically taken into account for the calculation of the moment of inertia and therefore also for the resulting feedforward control torque. In this case, the maximum material density must always be assumed to be 100%. If a variable material density input is not required, parameter U525.04 must be connected to K0001.2.4.5 Calculator for the diameterThe diameter calculator calculates the current diameter from the web velocity setpoint (or actual web velocity with V-constant control method) and the winder speed. This calculation is only performed if there is a frictional connection to the continuous material, the tension controller is turned on and the system is in the run state. Since the diameter can only decrease on an unwinder, and increase on a winder, calculation in the opposite direction is disabled ("monotone" setting for diameter change).If the user wishes to alter this behavior, he can enable the diameter calculator to work in both directions by changing parameter P421 from 1 to 0.2.4.6 Gearbox stageThe selection of gear stage 2 is automatically taken into account in the calculation of the moment of inertia and the resulting feedforward control torque. The lower gear ratio must always be assumed to be 100%.16-52Siemens AG2.4.7Speed controller adaptationThe proportional gain and reset time of the speed controller can be adapted as a function of moment ofinertia. An optimization process is used to determine the values at minimum and maximum winding diameters and linear interpolation performed between them.2.4.8Tension controller adaptationThe proportional gain of the tension controller can be adapted as a function of moment of inertia.2.4.9Web break recognitionIf the tension control is turned on, the web break recognition is enabled.Direct tension control:Triggering results if selectable torque variance is exceeded and torque drops below minimum tension.Indirect tension control:Triggering results if selectable torque variance is exceeded and torque dropsbelow selectable minimum.Compensating roll:Triggering results if instantaneous value exceeds selectable position value.If web tear recognition is triggered, speed setpoint is set 0 and the calculation for the diameter is disabled.The unwinder turns backwards, the winder forward, both using their bias. If a compensating (dancer) roll control is used, the position controller reaches its limit due to the missing instantaneous value. The bias results from the set intervention. After a selectable time , "Off 3“ is triggered.2.5 Acceleration compensation calculationIn order to ensure a constant tension torque during acceleration and deceleration, the armature current should be pre controlled using the required torque. The moment of inertia is never a constant value due to the steady change of the diameter of the winder.♦ Fixed inertia J F (adjustable using P407)♦ Variable moment of inertia J V (is calculated using building block 116, and is influenced by web width(K3008) and material density K3009)Chapter 4 contains instructions on how to calculate the two torques using available system data.2.5.1Determination of fixed value inertiaThe fixed moment of inertia is the sum of the following moment of inertia ♦ moment of inertia of motors♦ moment of inertia of gear corresponding to the shaft of the motor ♦ moment of inertia of winder core corresponding to the motor shaft ♦additional moments of inertia such as couplersFormula:2Core Gear Motor F i J J J J ++=For motor or gear values please refer to the datasheet or type plate. The inertia of the winder core has to be calculated. (Contact formula for the calculation of moment of inertia for solid cylinder or hollow cylinder.).If the winder's core mass is relatively small, or the gear ratio rather large, the moment of inertia can be considered irrelevant.。
MEMS 实验 使用L-Edit画PMOS布局图
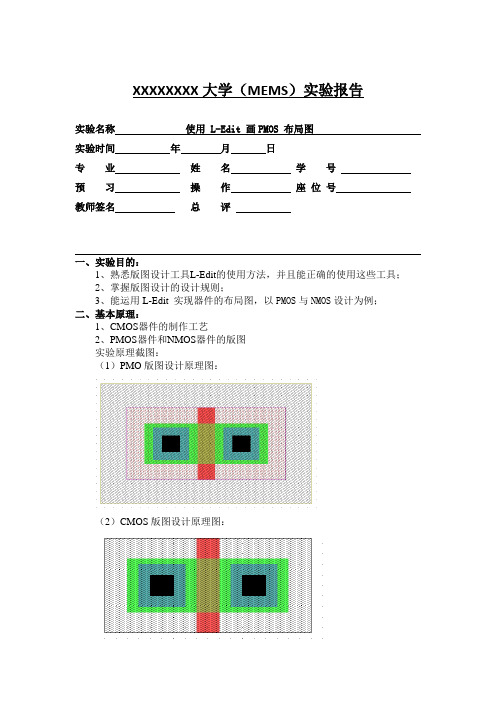
XXXXXXXX大学(MEMS)实验报告实验名称使用 L-Edit 画PMOS 布局图实验时间年月日专业姓名学号预习操作座位号教师签名总评一、实验目的:1、熟悉版图设计工具L-Edit的使用方法,并且能正确的使用这些工具;2、掌握版图设计的设计规则;3、能运用L-Edit 实现器件的布局图,以PMOS与NMOS设计为例;二、基本原理:1、CMOS器件的制作工艺2、PMOS器件和NMOS器件的版图实验原理截图:(1)PMO版图设计原理图:(2)CMOS版图设计原理图:3、设计版图时的注意事项:(1)L-Edit编辑环境是预设在P型基板上,故在P型基板上制作PMOS的第一步是需要做出N Well区,即需设定N阱区;然而对于NMOS则不需要N Well群区。
此外在设计版图时,需要将图绘制在原点之上,否则不利用版图截面的观察。
(2)改变图形大小的方法:“alt+鼠标拖动边框”;移动图形的方法“alt+鼠标拖动图形”;(3)绘制各图层之前需先通过Tools---DRC Setup查看对应的设计规则,从而选择确定图层的大小;绘制完一个图层都需DRC 进行设计规则检查;(4)各图层绘制无先后顺序的规定;(5)绘图时可适当使用“尺子”功能,以确保版图设计的对称性;清除图中的“尺寸”使用“View---Objects---Rules”或者选中后删除。
(6)对版图设计时,要注意时刻遵循设计规则,否则会出错误。
(7)对版图进行截面观察时,应注意选择好文件的路径,并且要设置好适当的界线位置。
三、实验内容及步骤:(1)打开 L-Edit 程序。
(2)另存新文件:选择 File---Save As命令,打开“另存为”对话框,在“保存在”下拉列表框中选择存储目录,在“文件名”文本框中输入新文件名称,例如:exp3。
(3)取代设定:选择File---Replace Setup命令,单击出现的对话框的From file 下拉列表右侧的 Browser按钮,择…:\LEdit83\Samples\SPR\example1\lights.tdb文件,再单击 OK 按钮,就可将 lights.tdb 文件的设定选择性应用在目前编辑的文件,包括格点设定、图层设定等。
假如拥有智能芯片 英语作文评语

假如拥有智能芯片英语作文评语If I possessed an intelligent chip, I envision it as a minuscule yet potent device seamlessly integrated within my neural network. This cutting-edge technology would augment my cognitive abilities, propelling me to intellectual heights previously unattainable.One of the most profound impacts of such a chip would be the exponential expansion of my memory capacity. I could effortlessly retain vast amounts of information, from the intricacies of quantum physics to the nuances of ancient civilizations. This enhanced recall would empower me to make connections and draw insights that would have otherwise eluded me. Imagine being able to access a comprehensive encyclopedia at the mere flick of a thought, enabling me to engage in informed discussions and makewell-reasoned decisions.Furthermore, the chip would significantly enhance my analytical and problem-solving skills. By employingadvanced algorithms and machine learning techniques, it would analyze data with exceptional speed and accuracy.This would allow me to quickly identify patterns, evaluate multiple scenarios, and optimize my decision-making. In the realm of scientific research, I could expedite complex simulations and derive meaningful conclusions from voluminous datasets, accelerating the pace of discovery.Beyond its cognitive benefits, the chip would also enhance my sensory experiences. It could heighten my visual acuity, allowing me to perceive details and colors with unparalleled clarity. I could immerse myself in the vibrant hues of a sunset, appreciate the intricate patterns of a butterfly's wings, and navigate dimly lit environments with ease. Similarly, my hearing could be amplified, enabling me to discern subtle nuances in music, detect faint soundsfrom afar, and engage in crystal-clear conversations evenin noisy settings.The chip would also revolutionize my communication abilities. By interfacing directly with my language centers, it could facilitate real-time translation, allowing me tocommunicate effortlessly with people from diverselinguistic backgrounds. I could engage in meaningful conversations, share ideas, and foster cross-cultural understanding like never before. Additionally, the chip could provide me with instant access to vast linguistic databases, enabling me to expand my vocabulary, master new languages, and appreciate the subtleties of different cultures.However, with great power comes great responsibility. I recognize that the possession of an intelligent chipcarries ethical implications that must be carefully considered. It is imperative that I use this technology for the betterment of humanity, not for personal gain or malevolent purposes. I must constantly question the potential consequences of my actions and strive to act in a manner that aligns with my moral compass.In conclusion, the prospect of possessing anintelligent chip fills me with both excitement and a profound sense of responsibility. I envision a future where this technology empowers me to transcend the limitations ofmy current cognitive abilities, unlocking a world of possibilities and enabling me to make meaningful contributions to society. While I eagerly anticipate the day when such a chip becomes a reality, I will remain mindful of the ethical considerations and strive to use this gift wisely and for the greater good.。
四下第二单元作文我的发明

四下第二单元作文我的发明英文回答:I am thrilled to share with you my exceptional invention that has the potential to revolutionize the world of innovation and technology. This extraordinary device, which I have named the "Omni-Versal Quantum Nexus," is a testament to my unwavering passion for pushing the boundaries of human ingenuity.The Omni-Versal Quantum Nexus (OVQN) is a groundbreaking invention that harnesses the untapped potential of quantum mechanics to create a groundbreaking platform for computational power. This remarkable device operates at the atomic and subatomic level, leveraging the principles of superposition and entanglement to perform calculations at an unprecedented speed and accuracy.One of the most significant advantages of the OVQN is its ability to solve complex problems that are currentlyimpossible to address with existing computational methods. By harnessing the power of quantum computing, the OVQN can accelerate scientific discoveries, facilitate medical breakthroughs, and optimize financial models with unparalleled precision.Furthermore, the OVQN is designed to be highly versatile and adaptable to a wide range of applications. This innovative device can be integrated into various fields, including artificial intelligence, cryptography, and materials science, enabling users to explore new frontiers of knowledge and technological advancements.Beyond its practical applications, the OVQN also has the potential to inspire future generations of scientists, engineers, and inventors. This exceptional creation serves as a beacon of possibility, demonstrating that anything is possible with relentless determination and a thirst for innovation.In recognition of its transformative potential, I am eager to collaborate with leading experts in academia,industry, and government to develop the OVQN further and unleash its full potential to shape the future of technology and human progress.中文回答:我的发明,全能量子网络(Omni-Versal Quantum Nexus),是一项具有革命性意义的发明,它将彻底改变创新和技术领域。
必要是发明之母英语作文

必要是发明之母英语作文Necessity, the Mother of InventionInvention, the act of creating something new or improving upon an existing concept, has been a driving force behind human progress and development throughout history. At the heart of this process lies the concept of necessity, often referred to as the "mother of invention." The idea that necessity, the need or desire for a particular solution or product, is the primary catalyst for innovative thinking and problem-solving has been widely recognized and celebrated.Throughout the ages, humans have faced a myriad of challenges, from the basic necessities of survival to the more complex demands of modern life. Whether it's the need for shelter, transportation, communication, or even entertainment, these pressing needs have consistently sparked the creative minds of inventors and innovators, leading to the development of groundbreaking technologies and solutions.One of the most prominent examples of necessity-driven invention is the wheel. The wheel, a simple yet revolutionary invention, is believed to have emerged from the need for more efficient means oftransportation and the movement of goods. As early humans grappled with the challenges of traversing vast distances and transporting heavy loads, the invention of the wheel provided a solution that dramatically improved their mobility and productivity.Similarly, the invention of the printing press, which revolutionized the dissemination of information and knowledge, was a response to the growing demand for accessible and affordable literature. Johannes Gutenberg's innovative design, which allowed for the mass production of books, transformed the way information was shared and preserved, paving the way for the widespread availability of knowledge and the democratization of education.In the realm of communication, the invention of the telephone by Alexander Graham Bell was a direct response to the need for more efficient long-distance communication. As the world became increasingly interconnected, the demand for a reliable and convenient means of communication became paramount, and Bell's invention fulfilled this need, forever changing the way people interacted and exchanged information.The advent of the internet, a transformative technology that has profoundly impacted nearly every aspect of modern life, is another prime example of necessity-driven invention. As the world became increasingly digitized and the demand for instant access toinformation and global connectivity grew, the internet emerged as a solution, connecting people, businesses, and communities across the globe.In the field of medicine, the development of life-saving vaccines and treatments has been driven by the urgent need to address pressing health challenges. The COVID-19 pandemic, for instance, has highlighted the critical importance of scientific innovation and the role of necessity in driving the rapid development of effective vaccines and therapies to combat the global health crisis.Beyond these well-known examples, the principle of necessity as the mother of invention can be observed in countless other domains, from the creation of energy-efficient technologies to the development of innovative solutions for sustainable resource management and environmental preservation.In each of these cases, the driving force behind the invention or innovation was the recognition of a pressing need, a problem that required a solution. This recognition, combined with the human capacity for creativity, ingenuity, and problem-solving, has consistently led to the development of groundbreaking technologies and solutions that have transformed the world we live in.Ultimately, the notion of necessity as the mother of inventionunderscores the fundamental human drive to adapt, improve, and create in response to the challenges and demands of our ever-evolving world. As we continue to face new and complex challenges, the power of necessity to inspire and catalyze innovation will undoubtedly remain a driving force in the ongoing pursuit of progress and the betterment of the human condition.。
关于未来世界的万能芯片作文

关于未来世界的万能芯片作文英文回答:In the realm of the future, technology continues to advance at an unparalleled pace, blurring the boundaries between the digital and physical worlds. One such groundbreaking innovation is the advent of the Universal Chip, a transformative device poised to revolutionize our lives in ways we can scarcely imagine.The Universal Chip is an ultra-compact yet immensely powerful processor that seamlessly integrates with our bodies and surroundings. It boasts advanced computational capabilities, enabling it to execute complex tasks with lightning speed and precision. But its true potential lies in its unparalleled versatility, which allows it to interface with a vast array of devices and systems.Imagine a world where your clothing becomes more than just a protective layer. Embedded with Universal Chips,your garments could transform into interactive, data-driven assistants. They could monitor your vital signs, track your fitness levels, and even provide real-time navigation through augmented reality interfaces projected directly onto your field of vision.The Universal Chip empowers you with unprecedented control over your environment. Smart homes equipped with these chips would anticipate your every need, adjusting temperature, lighting, and entertainment systems to create a personalized haven. Vehicles would become self-driving chariots, seamlessly navigating through congested streets while you focus on other tasks or simply relax.Beyond the realm of personal convenience, the Universal Chip holds the promise of profound societal transformation. It could revolutionize healthcare by providing remote medical assistance, enabling doctors to diagnose and treat patients in far-flung regions. In education, it would create immersive learning experiences, allowing students to explore virtual worlds and interact with experts from across the globe.However, with great power comes great responsibility. The Universal Chip raises important ethical considerations that must be carefully addressed. Ensuring privacy and security will be paramount, as the device would have access to vast amounts of personal data. Furthermore, there is a need to mitigate the potential for misuse and inequality in the distribution of these chips.As we venture into the future with the Universal Chip by our side, it is essential to embrace its transformative potential while remaining mindful of the challenges it may bring. By fostering collaboration and responsible governance, we can harness this groundbreaking technology to create a world that is both technologically advanced and ethically sound.中文回答:未来世界中,科技仍将以无与伦比的速度前进,模糊数字和物理世界之间的界限。
芯片之母黄令义英语作文
芯片之母黄令义英语作文Huang Lingyi, a trailblazing figure in the semiconductor industry, has been hailed as the "Mother of Chips" for her pioneering contributions to the development of integrated circuits. Born in 1931 in Zhejiang, China, Huang's remarkable journey has left an indelible mark on the technological landscape, inspiring generations of innovators and engineers.Huang's early life was marked by hardship and determination. Growing up during a turbulent period in China's history, she faced numerous challenges, including the Chinese Civil War and the Great Leap Forward. However, her unwavering passion for science and technology propelled her forward, and she ultimately pursued her dreams by studying electrical engineering at Zhejiang University.After graduating, Huang's career took off, and she quickly established herself as a leading expert in the field of semiconductor research. In the 1960s, she joined the Chinese Academy of Sciences, where she played a pivotal role in the country's efforts to develop its own integrated circuit technology. Her groundbreaking work on thedesign and fabrication of semiconductor devices laid the foundation for China's burgeoning electronics industry.One of Huang's most significant achievements was her contribution to the development of China's first integrated circuit, the DH1001, which was unveiled in 1972. This milestone not only demonstrated China's technological capabilities but also paved the way for the country's rapid advancements in the semiconductor industry. Huang's leadership and technical expertise were instrumental in this achievement, and she continued to drive innovation in the years that followed.Throughout her career, Huang's dedication to her work was unwavering. She worked tirelessly, often putting in long hours and sacrificing personal time to ensure the success of her projects. Her commitment to excellence and her ability to overcome challenges were hallmarks of her leadership style, and she inspired countless colleagues and students with her passion and vision.Huang's impact extended beyond the laboratory as well. She was a tireless advocate for the advancement of women in science and technology, using her platform to encourage and empower young female scientists. She mentored numerous students and protégés, many of whom went on to become leaders in their own right, further cementing her legacy as a true trailblazer.One of the most remarkable aspects of Huang's legacy is the enduring impact of her work. The integrated circuits she helped develop have become the backbone of modern electronics, powering everything from smartphones to supercomputers. Her contributions have had far-reaching implications, not only for China's technological development but for the global semiconductor industry as a whole.Today, Huang's name is synonymous with innovation and excellence in the field of semiconductors. She has been honored with numerous awards and accolades, including the National Science and Technology Progress Award, China's highest honor for scientific and technological achievements. Her story has become an inspiration to aspiring scientists and engineers around the world, who see in her the embodiment of what can be achieved through hard work, dedication, and a relentless pursuit of knowledge.As the semiconductor industry continues to evolve and shape the future of technology, the legacy of Huang Lingyi will undoubtedly endure. Her pioneering spirit, her unwavering commitment to excellence, and her profound impact on the field of integrated circuits have cemented her place as a true icon of the technological age. Through her life and work, Huang has not only transformed the landscape of electronics but has also inspired countless individuals topursue their own dreams and push the boundaries of what is possible.。
用MEMS制备高通量性能材料的表征

I NSTITUTE OF P HYSICS P UBLISHING M EASUREMENT S CIENCE AND T ECHNOLOGY Meas.Sci.Technol.16(2005)111–118doi:10.1088/0957-0233/16/1/015MEMS tools for combinatorial materials processing and high-throughput characterizationA Ludwig1,2,J Cao1,J Brugger3and I Takeuchi41Combinatorial Materials Science Group,Center of Advanced European Studies andResearch(CAESAR),Ludwig-Erhard-Allee2,53175Bonn,Germany2Faculty of Mechanical Engineering,Institute of Materials,Ruhr-Universit¨a t,44780Bochum,Germany3Microsystems Laboratory,Institute of Microelectronics and Microsystems,Ecole Polytechnique F´e d´e rale de Lausanne(EPFL),1015Lausanne,Switzerland4Department of Materials Science and Engineering and Center for SuperconductivityResearch,University of Maryland,College Park,MD20742,USAE-mail:ludwig@caesar.deReceived17May2004Published16December2004Online at /MST/16/111AbstractUsing the combinatorial material synthesis approach,materials libraries canbe produced in one experiment that contain up to several thousand sampleson a single substrate.In order to identify optimized materials in an efficientway using screening methods,adequate automated material characterizationtools have to be designed and applied.Microsystems(micro-electro-mechanical systems:MEMS)offer powerful tools for the fabrication andprocessing of materials libraries as well as for accelerated materialcharacterization on planar substrates such as Si wafers.MEMS can be usedfor parallel materials processing,either as passive devices such as shadowmask structures,or as active devices such as micro-hotplates.Microstructured wafers,which incorporate sensor or actuator structures suchas electrode or cantilever arrays,can be used to identify materials propertiesin an efficient way.Keywords:combinatorial materials science,MEMS,shadow masks,nanostencil,micro-hotplates,electrode arrays,cantilever arrays(Somefigures in this article are in colour only in the electronic version)IntroductionThe aim of this paper is to present the concept of using MEMS tools for combinatorial materials science,and to review work related to this binatorial synthesis of materials libraries,combined with high-throughput measurement techniques,are technologies which enable the efficient investigation and production of new functional devices based on micro-or nanostructured thinfilms[1].The aim of this methodology is to accelerate discovery and optimization of advanced materials.Micro-fabrication is a mature technology for producing micron-sized structures and microsystems(e.g., sensor and actuator arrays with integrated electronics)which have characteristic dimensions in the micrometre scale and have unique properties resulting from their small dimensions (e.g.surface/volume ratio)[2].Combinatorial techniques and MEMS technologies share the concept of producing well-controlled materials and devices in the form of arrays.In the field of MEMS,fabrication of sensor/actuator arrays gives rise to improved functionality(e.g.selectivity)[3]and redundancy, and it facilitates error checking by reference measurements within the array.In combinatorial materials science,the arrays are called‘materials libraries’[4].Advantages of materials libraries,compared to conventional preparation of samples, are that a broad range of different or continuously graded materials can be deposited in one experiment,and coverage of0957-0233/05/010111+08$30.00©2005IOP Publishing Ltd Printed in the UK111A Ludwig etalFigure 1.Schematic illustration of a micro-fabricated Si substrate on which a thin film material library is deposited.The substrate incorporates cantilevers and electrodes (not shown)used for the screening of a library.For the fabrication of such substrate /materials libraries with micro-sized features the use of micro-shadow masks is proposed (see section 1.1).a large parameter space becomes possible.This facilitates rapid exploration of materials with enhanced properties.Occurrence of measurement errors due to limited sampling can be reduced.Another important aspect is that the materials and device applications in MEMS and thin film combinatorial materials science are of the same length scale.Advanced MEMS technology increasingly requires new tailor-made materials:tailored with respect to composition,nanostructure,stress state,etc.In fact,with increased complexity of microsystems,mixed-material systems are being developed that include silicon,metals,polymers and other organic substances.As technologies in these fields advance,materials and structures will be more and more integrated:this will make the differentiation between material and structure obsolete as a final consequence.A development goal of materials science will therefore be the integration of multiple functionalities into the used material itself in order to achieve a high density of functions on the smallest scale.Such new,multi-functional materials and material combinations at the micron scale can be efficiently developed and optimized by the combinatorial materials science methodologies.There are also other common features in MEMS and combinatorial technologies which will not be discussed in this paper.Generally,MEMS enable new actuation and sensing technologies which can be used for materials fabrication and characterization.The very broad field of scanning probe microscopy relies on microfabricated structures and systems [5].At the interface between organic and inorganic materials,direct-write methods based on the atomic force microscope (AFM)cantilever principle are emerging: e.g.dip-pen lithography [6]uses a special ‘ink’on the tip of an AFM cantilever to deposit nanostructured arrays [7].Nanoscale dispensing (NADIS,[8])uses micrometre sized fluidic reservoirs near AFM tips to deliver molecules onto surfaces locally.Such technologies enable combinatorial surface chemistry at micron and nanometre scales.The idea of using parallel cantilevers for high-throughput micro /nanodot fabrication is becoming feasible with growing possibilities in MEMS.The concept of miniaturization helps to perform efficient research using only very small quantities of materials.High-throughput experimentation in bio-chemistry takes advantage of microsystems such as lab-on-chip [9].Furthermore,there are microsystems such as micro-reactors which can be used for combinatorial chemistry [10],or micro-actuators needed for combinatorial ink-jet printing [11].The use of MEMS tools for combinatorial materials investigation is proposed in order to improve bothquality Figure 2.Schematic illustration of a shadow masking process for fabrication of thin film materials libraries.Materials are deposited through micro-or nano-sized apertures.The shadow masks can be designed in a way to allow varying lateral structure size over the substrate.By combinatorial deposition methods (e.g.opposed wedge type films [14])a varying composition can be achieved in a direction orthogonal to the size variation.and quantity,in terms of resolution and throughput,for the synthesis and analysis of new materials and new material combinations at micron and sub-micron scales.Therefore,this paper illustrates the utility of MEMS tools for combinatorial materials research and highlights some recent results in these areas.First,MEMS tools are discussed,which enable improved fabrication processes for discrete materials libraries in terms of material properties,quality,throughput and fabrication cost.It is important to mention that the obtainable accuracy of the synthesis of materials libraries determines the quality and feasibility of the high-throughput measurements.Examples for such MEMS tools are micro-machined shadow masks.In particular,fabrication of materials libraries directly on micro-machined sensor /actuator arrays without the use of photolithography is very promising.This is illustrated in figures 1and 2.Other examples are active microsystems such as micro-hotplates for (post-)processing of materials.Second,the use of MEMS in high-throughput materials characterization in such cases as electrode and cantilever arrays is discussed.112MEMS tools for combinatorial materials processing and high-throughput characterization1.Micro-machined structures and microsystems for the fabrication and processing of materials libraries The way materials libraries are fabricated determines to a large extent how effectively high-throughput measurements can be performed.Materials libraries can be deposited as continuous composition spreads or as discrete arrays[1].Using micro-or nanostructuring technologies,discrete materials libraries can be fabricated which consist of hundreds to thousands(in the case of nanoscale spots even millions)of different materials on a single substrate.However,the density and size of the addressable spots on a materials library have to be compatible with those of the applied screening method,which determines the resolution of the analysis.As measurement technologies advance by miniaturization,and sensor dimensions reach the micron scale,similarly-sized dimensions of materials spots on high-density materials libraries can be realized.Requirements for the fabrication of materials libraries include accuracy of the desired chemical compositions and correctness of the lateral dimensions in the case of discrete materials libraries.These aspects are interlinked when one is performing multiple depositions through masks which have to be aligned with respect to each other.It is expected that the most reliable results can be obtained when fabricating and processing as much as possible in situ during one experiment in order to avoid contamination which inevitably occurs when breaking vacuum.1.1.Passive MEMS for patterning:micro-fabricated shadow masks(micro-,nanostencils)In order to fabricate discrete materials libraries with micrometre or sub-micrometre resolution,one can use standard photolithographic surface patterning methods.The structuring of thinfilm layers however involves a series of processing steps and sub-steps:thinfilm deposition, photoresist spinning,exposure,development,etching and finally resist removal.These steps need to be performed for each layer in the process.A further drawback is the potential contamination of surfaces with organic materials (photoresist,developer).In addition,the use of photoresist masking structures is restricted to low temperatures and an in-vacuum change of the mask orientation is not possible. However,several re-orientations of shadow masks with respect to previously deposited layers are necessary for producing high-quality materials libraries.Therefore,surface micro-patterning methods based on photolithography for the creation of large materials libraries consisting of multi-component arrays are not suitable.A promising alternative to overcome these problems is to perform thinfilm patterning based on the shadow mask principle,which allows for an in situ(i.e.in vacuum) application including several re-orientations of the mask with respect to the substrate.A major advantage of the shadow mask patterning method is that unconventional surfaces such as chemically modified surfaces and mechanically fragile substrates, e.g.cantilever arrays,and non-flat substrates can be patterned by local deposition[12].Micro-fabricated shadow masks(micro-or nanostencils(i.e.solid-state membranes with(sub-)micron apertures)[13])confine the deposition of a thinfilm to a well-defined surface area,thus eliminating the need for other processing steps, such as etching.They allow for rapid,clean and direct patterning of laterally confined layers of a thinfilm on a large variety of ing stencil masks,laterally structuredfilms can be fabricated in a single processing step.Figure2shows a schematic diagram of a micro-fabricated micro/nanostencil,as well as resulting patterned structures.The combination of micro/nanostructured shadow masking technology with combinatorial material deposition methodologies,as illustrated infigure2,could lead the way to a new direct fabrication or optimization of novel sensors and actuators based on nanoscale materials without the use of photolithography.In particular,the combination of these two technologies allows the variation of composition(e.g.by opposing wedge type multilayerfilms)and nanostructure(by the nanostencil)in one experiment(seefigure2).Thus, screening for nanoscale effects,or generally the study of materials properties depending on the length scale,in thin films can be facilitated.A MEMS-made shadow mask typically consists of a thin solid-state membrane attached to a silicon chip as a frame.The size of a thin membrane can reach several millimetres,whereas the membrane apertures can be fabricated with a possible length scale ranging from millimetre scale down to sub-micron dimensions(a few tens of nanometres in the case of high-resolution nanofabrication with a focused ion beam(FIB)). The smallest,single,metal structure fabricated up to now to our knowledge is about10nm in lateral dimension,although it is limited to micrometre areas only[15].The membrane material usually consists of low-stress silicon nitride(SiN)or single-crystal silicon(Si)made in silicon-on-insulator(SOI) wafers.Photo-structurable polymers,such as SU-8,have also been used,which offer the advantage of a simplified stencil fabrication process[16].There are several limitations of micro/nanostencils,one is mechanical stability,another is aperture clogging.The three parameters of pattern size,pattern density and overall area of patterning determine the performance of shadow masks. Structures with well-defined edges(<50nm edge roughness) can only be fabricated by depositing through ultra-thin(about 100nm)shadow mask membranes.Dense pattern structures require membrane apertures to be in close vicinity to the neighbouring rge areas require large membranes. From a mechanical point of view,an optimum can be found to satisfy two out of the three above parameters,but not all three simultaneously[17].A novel DUV-MEMS stencil has provided further technological improvement in density and throughput[18].Another critical issue,especially when working with stencils having sub-micron scale apertures,is their re-use.Nanoscale apertures are easily clogged during the deposition process as the depositedfilm also grows on the aperture’s sidewall.Stencil masks can be cleaned by wet-chemical etching of the deposited material,provided a selective removal of the depositedfilm with respect to the stencil material is available.Alternatively,dry plasma cleaning is also feasible.Another possibility is to reduce the adhesion of the deposited materials on the apertures by coating the stencil with a functional layer,such as self-assembled monolayers (SAM)to reduce adhesion[19].From the viewpoint of113A Ludwig etal(a )(b )(c )Figure 3.Schematic of possible alignment methods for micro-machined shadow masks:(a )alignment pins using pyramids,(b )alignment using wires in etched V-grooves.(c )Results for alignment test structures in two different metal layers (Al and Au)[16].The pattern was deposited using a micromechanical jig alignment scheme.A precision of <2µm was achieved in the x -and y -directions.substrate contamination by the stencil at higher temperatures,the use of thermally stable Si /SiN stencils is preferable compared to polymeric SU-8stencils.1.1.1.Alignment of shadow masks.In the case of depositing combinatorial materials libraries using the precursor deposition method [20],multiple shadow masking steps are necessary.This is also true for depositing materials on pre-structured wafers (e.g.cantilever,electrode arrays,see figure 1).Therefore,an alignment of the masks with respect to pre-deposited films or microstructures is necessary.This can either be performed by using external mechanical alignment devices (figure 2)or by using microstructured features on the mask and the substrate (figure 3).Especially interesting is the use of the intrinsic accuracy of Si single crystal substrates.By anisotropic etching,V-grooves and pyramidal structures can be fabricated which can be used for alignment.Micro-stencils with in situ mechanical alignment,or self-alignment based on silicon micro-pins [12],photoplastic jig and V-groove structures [16],as well as {111}silicon planes [21],have been demonstrated.1.1.parison of evaporation,sputtering and PLD through nanostencils.Local deposition through shadow masks or stencils is not limited to methods based on thermal evaporation,but can also be used with sputtering,epitaxy and pulsed laser deposition (PLD).The possibilities of sub-micron patterning by means of microstencils using PLD have been investigated by one of the authors [22].Stencils with circular and elliptical patterns were used,with apertures ranging from 1µm down to 500nm.SrTiO 3,Si and self-assembled monolayers (SAM)on Au were used as substrate materials to deposit Ni,NiO and Au.The results show that the chosen deposition set-up presents an easy and fast method for high-quality pattern creation.Figure 4shows a result obtained by magnetron sputtering of Cu through a nanostencil.1.2.MEMS tools for local processing1.2.1.Electrode arrays.Electrode arrays can be used for electrochemical combinatorial material deposition [23]asthe Figure 4.SEM picture of a Cu film (thickness:5nm)sputter-deposited through a nanostencil.The complete array contains 10000spots (each about 2µm diameter)in an area of about 0.076mm 2.electrodes can be addressed individually using a multiplexer or a switching matrix.They can easily be manufactured by photolithography,deposition and patterning of films.Furthermore,electrode arrays can be used also for sensing applications,as discussed in 2.2.1.2.2.Micro-hotplates.Micro-hotplate arrays (figure 5(a ))can be described as a special form of electrode arrays.They can be used for in situ or ex situ combinatorial thermal material processing and parallel testing of materials properties.A detailed description of micro-hotplates can be found in [24].A micro-hotplate consists of several thin films on a (micro-machined)substrate.The individual micro-hotplates should be thermally isolated which can be achieved by suspending the micro-hotplate over an etch-pit by arms with low thermal conductivity which also carry the electrical lines.These lines connect the resistive heater and probing electrodes for on-chip measurements such as temperature and electrical resistance.The electrical lines are insulated by e.g.SiO 2.114MEMS tools for combinatorial materials processing and high-throughputcharacterizationFigure5.Schematic of(a)discrete array of micro-hotplates and(b)concept for micro-machined gradient heaters.A metal plate can be deposited to ensure a uniform temperature distribution over the micro-hotplate.Temperatures of up to 1000◦C can be achieved.Due to their low mass,heating and cooling can be performed rapidly,allowing for novel thermal processing routines such as rapid change of temperature during deposition[24].Depositing thinfilms locally on micro-hotplates can be realized by different approaches[24].As the hotplate areas are typically on the order of100µm×100µm,adequate deposition processes have to be applied,when the hotplates are to be coated with different materials.Semancik[24]discusses thermally activated chemical vapour deposition,localized electrochemical deposition,thermal drying and lithography. Finally,shadow masking is proposed for processes such as evaporation and sputtering.Due to individual addressability of the micro-hotplates, one can perform experiments with a local control of substrate ing only one thinfilm deposition on a single substrate with locally controlled temperature variation ranging from e.g.150◦C to800◦C,it becomes possible to rapidly identify optimized deposition temperatures.Figure5(b)shows the concept of a micro-machined gradient annealing experiment.A homogeneousfilm can be deposited on a substrate with a continuously varying temperature.With this method one can rapidly study diffusion, crystallization temperatures,phase formation temperatures, etc in multilayers.1.2.3.Active shadow masks.The use of passive shadow masks has been described in section1.1.It would be of high technological interest if active shadow masking could be realized,i.e.shadow masks which would be addressable to open or close apertures on demand,or move from one position to another without re-orienting the whole mask.Luethi et al[25]have presented an active scanning stencil based on a combination of shadow masks and scanning probe methods.The method represents a resistless lithography technique,i.e.a local and variable direct patterning of thinfilm structures on wafers.Here,the sample is moved underneath a cantilever with an aperture during the deposition of the material,thus arbitrary patterns can be written on the surface, such as rings,wires and intersecting lines with dimensions of 100nm.Another advantage of this technique is that tapered thinfilm structures can be realized by varying the scan speed during the deposition.After deposition,the thinfilm structures can be characterized using the same AFM tip.Thus, this technology is highly interesting for depositing nanoscale combinatorial libraries.A related method has been presented recently for forming nanometre-scale metal features based on evaporation onto a substrate through a stencil mask.The stencil mask is laterally translated by a piezoflexure stage, between evaporations of different metals.The metals are chosen based on their etch chemistry to allow one material to be lifted off with respect to another.In this way,sidewall features are formed with dimensions and spacing controlled by moving the translation stage with1nm resolution[26]. 2.Micro-machined structures and microsystems for the high-throughput characterization of materials librariesDue to the small size of MEMS sensors,this technology is enabling new methods for faster and better local materials characterization:the wholefield of scanning probe microscopy is based on micro-structured probes[5].Another example is microstructured four-point probes for electrical conductivity measurements at(sub-)micron scale[27,28]. In the following section,cantilever and electrode arrays for the high-throughput measurement of materials properties are discussed.2.1.Cantilever arraysThe cantilever is a basic design component for MEMS which can be directly used to optimize thinfilm materials used for actuation and sensing in MEMS.Perhaps the most successful application of a micromachined cantilever is in atomic force microscopy including all its derivatives(scanning probe microscopy,e.g.magnetic force microscopy).Furthermore, the idea of using cantilevers in array form is very promising for new parallel versions of AFM[29],and also for new possibilities of data storage[30]and for gas-[31]or bio-sensing[32].Accelerated thinfilm material characterization using micro-machined cantilevers or cantilever arrays is another interesting approach.Cantilever techniques,either static or dynamically driven,have been used for the measurement of thinfilm materials properties such as mechanical properties [33],internal friction[34],stress state[35,36],bimetal effect[39],magnetostriction[37–39]and E effect[40], piezoelectric effect[39],and phase transitions like shape115A Ludwig etal(a)(b)Figure6.Arrays of Si cantilevers fabricated by bulk silicon micromachining used for screening of thinfilm materials properties.Typical cantilever dimensions are2mm×1cm,thickness60to100µm.The lines in(a)are a reflection of an image with coloured lines held over the wafer[41].The shifts in the positions of the lines as a function of temperature are used to detect small changes in the local curvature of the cantilever;(b)shows a photograph of a cantilever array where laser lines can be seen which are reflected by the cantilevers.memory effect[39].Furthermore,structural changes in thinfilms occurring e.g.during crystallization can be monitored bycoated cantilevers.Thefirst examples of the use of micromachined cantileverarrays for combinatorial materials science are published in[41,42].Materials libraries prepared by a co-sputteringmethod were screened for the(ferromagnetic)shape memoryeffect.By monitoring the reversible thermally inducedactuation of the shape memory alloyfilm/Si cantileverbimorphs,martensitic transformation temperatures can bedetected[43].For individual cantilevers,actuation is typicallymeasured using the capacitance formed between the end of thecantilever and a separate electrode.In order to map the regionsof shape memory alloys and their transition temperatures forthe entire spread,micromachined arrays of cantilevers wereused,and the composition spreads were deposited directly onthe array wafers(figure6(a))[41].In order to study thermallyinduced actuation of the entire cantilever array simultaneouslyby visual inspection,a method was developed which works onthe simple principle that individual cantilevers with metallicfilms deposited on them behave as concave mirrors.During atransition,stress-induced actuation on a cantilever results in asudden change in radius of the‘mirror’,and an image reflectedoff the cantilevers responds very sensitively as the curvature ofthe mirrors changes.By monitoring the change in the imageas a function of temperature,composition regions undergoinga transition can readily be discerned.In this manner,acantilever array serves as a‘self-reporting‘combinatoriallibrary for detection of the structural phase transition.Alltransitions observed were found to be reversible.As a resultof this measurement,a large new region in the Ni–Mn–Gathinfilm phase diagram which transforms martensitically wasdiscovered.A parallel measurement of the bi-metal effect of a Pdfilmon Si cantilevers is shown infigure7.A laser with an opticgenerating a line array is used to monitor the curvature ofthe cantilevers.The four reflections from each cantilever ona screen are captured by a CCD camera.The movementof the spots is measured as a function of temperature usingautomated image analysis.Generally,the preparation ofmaterials libraries or composition spreads on a cantilever arrayshould be in such a way that there is no gradient in compositionalong thecantilever.(a)(b)1201008060402025°C50°C75°C100C125C150°C175C250C°°°°temperaturedeflection[µm]Figure7.(a)CCD camera image of laser lines reflected from thecantilevers(seefigure6(b)).(b)Measurement result of the bi-metaleffect derived by automated picture analysis from images taken atdifferent temperatures.2.2.Electrode arraysElectrode arrays can be used for in situ or ex situ high-throughput measurements of the electrical resistance offilms which are deposited on the arrays.If such anelectrode array materials library is brought into a magneticfield,magnetoresistive effects such as anisotropic or giantmagnetoresistance(AMR,GMR)can be measured effectively.Furthermore by heating or cooling such materials libraries,thetemperature dependence of(magneto)electric properties canbe screened.116MEMS tools for combinatorial materials processing and high-throughputcharacterizationFigure8.An inorganic electronic nose chip(1inch×1inch) fabricated by combinatorial pulsed laser deposition[45].Surface acoustic wave(SAW)devices consist of interdigitated electrodes on piezoelectric substrates.SAWs can be applied in combinatorial materials screening[44]. These devices are sensitive to a range of properties and can be miniaturized by standard photolithography,film deposition and etching processes.There is a close link between materials and devices in microsystems.An example is an‘electronic nose’chip fabricated by one of the authors,figure8[45].An electronic nose is an instrument comprised of an array of different, semi-selective gas sensors and signal multiplexing electronics, capable of recognizing individual or mixtures of analytes through pattern recognition.There is a continuing need to improve the sensitivity and selectivity of inorganic gas sensors.In particular,selectivity is a criticalfigure of merit,and ideal sensors would respond differently to different gas species.One strategy in pursuing the development of improved sensors is to systematically study a large number of compositionally varying sensor materials simultaneously by using the combinatorial approach.The advantage of combinatorial libraries is two-fold:one is to search and optimize the compositions for high sensitivity and selectivity of gases,and the other is to make use of the natural array geometry of the libraries with different sensor elements for electronic noses.For fabricating gas sensor array chips,a combinatorial PLD was used,which allows spatially selective deposition of compositionally varying discrete samples with arbitrary layout designs on1inch×1inch substrates using computer controlled two-dimensional physical shadow masks.50nm thick sensorfilms of different compositions were deposited on selected sites(each with2mm×2mm area)on two-terminal Au electrode patterns on Al2O3(c-plane)substrates (figure8).The Au patterns were fabricated using a photolithographic lift-off process prior to the sensorfilm deposition.Various semiconductorfilms were deposited at 550◦C with an oxygen partial pressure of2×10−3Torr. Each sensor array consisted of16different compositions where SnO2was the host material and ZnO,WO3,In2O3, Pt and Pd were the dopants.The testing of the chips was performed in a cylindrical gasflow chamber,and all sensors were connected to the outside electronics to monitor their resistance change.The ability of the sensor arrays to distinguish different gas species through multi-channel pattern recognition was demonstrated.Response patterns for different gases(chloroform,formaldehyde and benzene)were obtained down to12.5ppm.3.ConclusionThe use of MEMS tools such as micro-fabricated shadow masks,micro-hotplates as well as cantilever and electrode arrays or combinations thereof for combinatorial materials processing and high-throughput characterization was proposed.The combination of these technologies could lead the way to a more efficient fabrication of materials libraries and allow for new screening technologies based on micromechanical structures.References[1]Xiang X D and Takeuchi I2003Combinatorial Materialssynthesis(New York:Dekker)[2]Madou M J2002Fundamentals of microfabrication2nd edn(Boca Raton,FL:CRC Press)[3]Menz W,Mohr J and Paul O2001Microsystem Technology(New York:Wiley)pp10–11[4]Xiang X D,Sun X,Brice˜n o G,Lou Y,Wang K A,Chang H,Wallace-Freedman W G,Chen S W and Schultz P G1995A combinatorial approach to materials discovery Science2681738–40[5]Binnig G,Gerber Ch,Stoll E,Albrecht T R and Quate C F1987Atomic resolution with atomic force microscopeEurophys.Lett.31281–6[6]Piner R D,Zhu J,Xu F,Hong S H and Mirkin C A1999‘Dip-pen’nanolithography Science283661–3[7]Ginger D S,Zhang H and Mirkin C A2004The evolution ofdip-pen nanolithography Angew.Chem.Int.Ed.4330–45 [8]Meister A,Jeney S,Liley M,Akiyama T,Staufer U,de Rooij N F and Heinzelmann H2003Nanoscaledispensing of liquids through cantilevered probesMicroelectron.Eng.67–68644–50[9]Baba Y,Shoji S and van den Berg A2002Micro TotalAnalysis Systems(Dordrecht:Kluwer)[10]Kikutani Y and Kitamori T2004Micro-flow reaction systemsfor combinatorial syntheses Macromol.Rapid Commun.25158–68J¨a hnisch K,Hessel V,L¨o we H and Baerns M2004Chemistry in microstructured reactors Angew.Chem.Int.43406–46 Watts P and Haswell S J2003Microfluidic combinatorial chemistry Curr.Opin.Chem.Biol.7380–7[11]Wallace D B and Grove M E2003Ink-jet methods incombinatorial synthesis High-Throughput Analysised R A Potyrailo and E J Amis(Dordrecht:Kluwer)pp469–90[12]Tixier A,Mita Y,Gouy J P and Fujita H2000A siliconshadow mask for deposition on isolated areas J.Micromech.Microeng.10157–62[13]Brugger J,Berenschot J W,Kuiper S,Nijdam W,Otter B andElwenspoek M2000Resistless patterning of sub-micronstructures by evaporation through nanostencilsMicroelectron.Eng.53403–5[14]Ludwig A2004Combinatorial fabrication of magneticmultilayerfilms Appl.Surf.Sci.22378–83[15]Champagne A R,Couture A J,Kuemmeth F and Ralph D C2003Nanometer-scale scanning sensors fabricated usingstencil lithography Appl.Phys.Lett821111–3[16]Kim G,Kim B and Brugger J2003All-photoplasticmicrostencil with self-alignment for multiple layershadow-mask patterning Sensors Actuators A107132–6 [17]Kim G M,van den Boogaart M A F and Brugger J2003Fabrication and application of a full wafer sizemicro/nanostencil for multiple length-scale surfacepatterning Microelectron.Eng.67–68609–14117。