A Mixed Integer Linear Programming Model for Dynamic Route Guidance
基于整数线性规划和混合整数线性规划的投资组合优化

1引言线性规划是用来寻求变量处于线性关系时的有效方法,在项目选择、投资组合优化、季节收益预测等问题中有多种应用。
整数规划与线性规划非常相似,但它要求所有或部分变量是整数。
某些情况下,整数规划更可取,如二元变量的管理决策。
部分决策变量为整数的模型,称为混合整数规划。
本文将会研究整数线性规划在投资组合优化中的应用。
模型A ,即整数线性规划(ILP )模型可以看作NP 完全问题中的0-1背包问题,通过模型A 找出可选入投资组合的股票。
另一个模型是混合整数线性规划(MILP ),这里使用的是有限资产平均绝对偏差(LAMAD )模型的演变来确定投资所选股票的确切数量,分配最合适的权重,以达到风险最小化、回报最大化的效果。
本文采用3种算法求解:分支剪界算法、动态规划算法和贪心算法。
分支剪界算法用CPLEX 12.6实现,动态规划算法和贪心算法在Eclipse 标准4.4平台上,用Java 语言实现,所采用的股票信息和数据由NASDAQ 和yahoo finance 网站获取。
2算法介绍以下介绍的算法都可以归属于启发法的范畴。
启发法是指不以找到问题的最佳或最确切的解决方案为目标的技术,而是找到一个足够可信的解决方案的方法。
直觉判断、刻板印象和常识都属于这个“范畴”。
它非常适用于在计算或搜索过于详尽和不实际的情况下,通过心理捷径来加快得到满意解决方案的过程,以减轻作出决策的认知负担。
它有常见的几种策略:第一种是将问题的目标状态进行切分,然后通过实现子目标逐渐实现总的目的;第二种是从最终目标状态逆向去寻找达到这个状态的途径;第三种是逐步收缩初始状态和目标状态的距离的方法。
元启发式是指导搜索过程的策略或上层方法论,元启发式的目标是有效地探索搜索空间,以找到最接近的最优解。
启发式依赖于问题,用于确定特定问题的“足够好”的解决方案,而元启发式就像一种设计模式,可以应用于更广泛的问题。
启发式方法特别适用于混合整数规划,因为混合整数规划太大而无法求解最优,而线性规划较为松弛,可以在合理的时间内求解。
运筹学第5章:整数规划

则问题可表示为:
max z c j x j
j 1 n
n a j x j B j 1 x1 x2 0 s.t. x3 x4 1 x x x 2 7 5 6 x j 0或1 j 1,2, , n 【例5-3】工厂A1和A2生产某种物资,由于该种物资供不应 求,故需要再建一家工厂,相应的建厂方案有A3和A4两个。这 种物资的需求地有B1、B2、B3、B4四个。各工厂年生产能力、各 地年需求量、各厂至各需求地的单位物资运费cij(j=1,2,3,4) 见表5-2。
三、割平面法的算法步骤
步骤1:将约束条件系数及右端项化为整数,用单纯形法求 解整数规划问题(ILP)的松弛问题(LP)。设得到最优基B,相应 的基最优解为X*。 步骤2:判别X*的所有分量是否全为整数?如是,则X*即为 (ILP)的最优解,算法终止;若否,则取X*中分数最大的分 量 x * ,引入割平面(5.7)。
表5-2
Ai cij A1 A2 Bj B1 2 8 B2 9 3 B3 3 5 B4 4 7 生产能力 (千吨/年) 400 600
A3
A4 需求量(千吨/年)
7
4 350
6
5 400
1
2 30025 150200200工厂A3或A4开工后,每年的生产费用估计分别为1200万元或 1500万元。现要决定应该建设工厂A3还是A4,才能使今后每年 的总费用(即全部物资运费和新工厂生产费用之和)最少。
一般来说,整数线性规划可分为以下几种类型:
1. 纯整数线性规划(Pure Integer Linear Programming): 指全部决策变量都必须取整数值的整数线性规划,也称为全整 数规划。 2. 混合整数线性规划(Mixed Integer Linear Programming):指决策变量中一部分必须取整数值,而另一部 分可以不取整数值的整数线性规划。 3. 0-1整数线性规划(Zero-one Integer Linear Programming):指决策变量只能取0或1两个值的整数线性规划。
Mixed Integer Linear Programming
Column name -----------x y
max x + y −2x + 2y ≥ 1 −8x + 10y ≤ 13 x, y ∈ Z
is (x, y ) = (1, 2) with objective 3 The optimal solution of its LP relaxation is (x, y ) = (4, 4.5) with objective 9.5 No direct way of getting from (x, y ) = (4, 4.5) to (x, y ) = (1, 2) by rounding! Something more elaborate is needed: branch & bound
Sessioaxation of a MIP
Given a MIP
Ty x + c min cT I R
(IP )
AR x + AI y = b x, y ≥ 0 y ∈ Zn
its linear relaxation consists in the LP obtained by dropping the integrality constraints:
Ty x + c min cT I R
(LP )
AR x + AI y = b x, y ≥ 0
Can we solve IP by solving LP ? By rounding?
Session 6 – p.5/40
Branch & Bound (1)
The optimal solution of
Session 6 – p.3/40
Computational Complexity: LP vs. IP
一步milp公式

一步milp公式(实用版)目录P 公式简介P 公式的应用领域P 公式的求解方法P 公式的优点与局限性正文一、MILP 公式简介MILP(Mixed Integer Linear Programming,混合整数线性规划)公式是一种优化问题,它是线性规划问题的扩展,引入了整数变量。
MILP 公式的目标是寻找一组整数解,使得目标函数值最小或最大,同时满足一组线性不等式约束条件。
二、MILP 公式的应用领域1.交通运输问题:MILP 公式可用于解决运输网络中的货物分配和最短路径问题。
2.生产计划问题:MILP 公式可用于制定工厂生产计划,以实现利润最大化或成本最小化。
3.供应链管理问题:MILP 公式可用于优化供应链网络,降低库存成本和运输成本。
4.电力系统问题:MILP 公式可用于电力系统的最优潮流计算和电力市场竞价机制。
三、MILP 公式的求解方法求解 MILP 公式的方法主要有以下几种:1.单纯形法:一种基于梯度的迭代算法,通过逐步优化基变量,逼近最优解。
2.内点法:一种基于预测 - 校正策略的原始 - 对偶路径跟踪算法,适用于大规模 MILP 问题。
3.分支定界法:一种基于广度优先搜索策略的算法,通过逐步修剪可行解空间,找到最优解。
4.割平面法:一种基于割平面技术的算法,通过在可行解空间中添加割平面,找到最优解。
四、MILP 公式的优点与局限性优点:1.可以处理含有整数变量的线性规划问题,具有较强的实用性。
2.有成熟的求解算法,可以获得较精确的解。
3.可以有效地描述和解决实际问题中的约束条件。
局限性:1.求解过程可能涉及大量计算,对计算资源有一定要求。
2.对于大规模问题,求解时间可能较长,影响实际应用效果。
运筹学(英)-cha7
Integer Linear Programming x2
5
-x1 + x2 < 1 3x1 + x2 < 9
4
3 2
Max 3x1 + 2x2
ILP Optimal (3, 0) x1 + 3x2 < 7 x1
1
1
2
3
4
5
6
7
Integer Linear Programming
Branch-and-bound method
x1 x2
3 ≤ 2
x1 x2
3 3
x1 = 4, x2 = 2 z = 14
x1, x2 ≥ 0
The feasible region is empty
x1, x2 ≥ 0
Integer Linear Programming
Illustration of the B&B method
x
j 1
n
j
k
2) Project j is conditional on project i:
x j xi 0
3) Project i is a corequisite for project j:
x j xi 0
4) Projects i and j are mutually exclusive:
Whole process:
1 LP=14.66 x1=2.44 x2=3.26 ub=14.00 lb=14.00
x1<2
x1>3
2 lp=13.9 x1=2 x2=3.3 x2<2 比较 故 ub=14
Blending problems
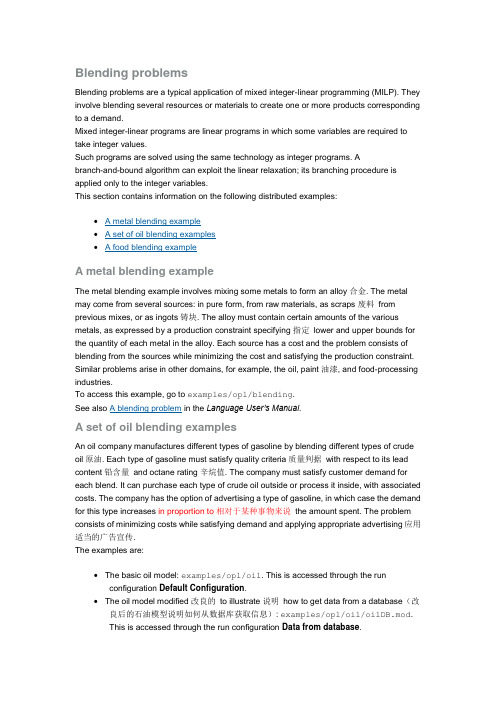
Blending problemsBlending problems are a typical application of mixed integer-linear programming (MILP). They involve blending several resources or materials to create one or more products corresponding to a demand.Mixed integer-linear programs are linear programs in which some variables are required to take integer values.Such programs are solved using the same technology as integer programs. Abranch-and-bound algorithm can exploit the linear relaxation; its branching procedure is applied only to the integer variables.This section contains information on the following distributed examples:∙ A metal blending example∙ A set of oil blending examples∙ A food blending exampleA metal blending exampleThe metal blending example involves mixing some metals to form an alloy合金. The metal may come from several sources: in pure form, from raw materials, as scraps废料from previous mixes, or as ingots铸块. The alloy must contain certain amounts of the various metals, as expressed by a production constraint specifying指定lower and upper bounds for the quantity of each metal in the alloy. Each source has a cost and the problem consists of blending from the sources while minimizing the cost and satisfying the production constraint. Similar problems arise in other domains, for example, the oil, paint油漆, and food-processing industries.To access this example, go to examples/opl/blending.See also A blending problem in the Language User’s Manual.A set of oil blending examplesAn oil company manufactures different types of gasoline by blending different types of crude oil原油. Each type of gasoline must satisfy quality criteria质量判据with respect to its lead content铅含量and octane rating辛烷值. The company must satisfy customer demand for each blend. It can purchase each type of crude oil outside or process it inside, with associated costs. The company has the option of advertising a type of gasoline, in which case the demand for this type increases in proportion to相对于某种事物来说the amount spent. The problem consists of minimizing costs while satisfying demand and applying appropriate advertising应用适当的广告宣传.The examples are:∙The basic oil model: examples/opl/oil. This is accessed through the run configuration Default Configuration.∙The oil model modified改良的to illustrate说明how to get data from a database(改良后的石油模型说明如何从数据库获取信息): examples/opl/oil/oilDB.mod.This is accessed through the run configuration Data from database.∙The oil model modified to illustrate how to get data from a database through a more efficient way: examples/opl/oil/oilDB2.mod. This is accessed through the runconfiguration Better database reading.See also Database initialization in the Language Reference Manual and The oildatabase example in IDE Tutorials.∙The oil project modified to demonstrate how to get data from and publish results t o a spreadsheet将结果输出在电子数据表里: examples/opl/oil/oilSheet.mod.This is accessed through the run configuration Data from spreadsheet.See Spreadsheet Input/Output in the Language Reference Manual and The oil sheet example in IDE Tutorials.A food blending exampleThe problem is to plan the blending of five kinds of oil, organized in two categories (two kinds of vegetable oils and three kinds of non vegetable oils) into batches of blended products over six months.Some of the oil is already available in storage. There is an initial stock of oil of 500 tons of each raw type when planning begins. An equal stock should exist in storage at the end of the plan. Up to 1000 tons of each type of raw oil can be stored each month for later use. The price for storage of raw oils is 5 monetary units货币单位per ton. Refined oil精炼油cannot be stored. The blended product cannot be stored either. 每个类型的油油500吨,计划结束后储存的各类型的油的数量应该相等,仓库每月最多可存放1000吨各类型的油,The rest of the oil (that is, any not available in storage) must be bought in quantities to meet the blending requirements. The price of each kind of oil varies over the six-month period. The two categories of oil cannot be refined on the same production line. 在这六个月中每个类型的油的价格是发生变化的,两组油不能在同一个生产线上提炼。
Integer Nonlinear Programming (MINLP) problems

Then P can be expressed as a projection on to the integer variables.
ymj2inV ?v(yj) :
In this projection the set V replaces Y in (1).
The equivalent MILP problem is now given by
master program relaxations that are solved in
the Outer Approximation Algorithms.
When all y 2 Y are feasible.
In this subsection the simplifying assumption
is made that all y 2 Y are feasible. The rst step
LP NLP MIP介绍 英文

The most important characteristic of an optimization problem is whether it is continuous or discrete. Continuous problems are those where the constraint set is infinite and has a continuous character, like linear optimization and nonlinearoptimization.1. Linear ProgrammingLinear programming, known as linear optimization, is the problem of maximizing or minimizing a linear function over a convex polyhedron specified by linear and non-negativity constraints. Simplistically, linear programming is the optimization of an outcome based on some set of constraints using a linear mathematical model.Convexity is a special property of linear programming, which means that the line connecting any two points is completely contained within the set. Its local optimum is exactlyglobaloptimum. Thus, the solution of optimization must lie on constraint.So linear programming can be solved using the simplex method which runs along polytope edges of the visualization solid to find the best answer.A different type of methods for linear programming problems are interior point methods. It achieves optimization by going through the middle of the solid defined by the problem rather than around its surface. The method can be more effective facing multi-variable problem for the reason that simplex can be very computationally intensive.Its practicalperformance is betterthantheoreticalcomplexity.Excellenttoolbox such as YALMIP is used by me when modeling and working out the solution of convex and nonconvex optimization problems. The “sdpvar”is the core object of YALMIP, whichrepresents the real decision variablesinthe optimization problems. The “set”is another kind of key object in YALMIP, which is used to include all the constraint in optimization problem. The function “solvesdp” is used to solve optimization problem. The functional form is as follow: s=solvesdp(F, f), where F is sum of constraint “set”, and f is the objective function.2.Nonlinear ProgrammingNonlinear Programming is another kind of optimizationwhere some of the constraints or the objective function are nonlinear. EveryconstrainedNLPhasthreebasiccomponents:asetofunknownsorvariablestobedetermined,ano bjectivefunctionto beminimizedormaximized,andasetofconstraintstobesatisfied.Solvingsuchaprobl emamountstofindingvaluesofvariablesthatoptimize(minimizeormaximize)theobjectivefunctionwh ilesatisfyingalltheconstraints.Aspecialkindofnon-linearprogramisconvexoptimization,inwhichthefe asible setisaconvexset,andtheoptimizationgoalandtheconstraintsareconvex/concave/linear functions.Some methods can be used to solve NLP. Its mechanism is to generate sequences of feasible points by searching along descent directions. In this sense, they can be viewed as constrained versions of unconstrained descent algorithms.Gradient descent is a first-order optimization algorithm. To find a local minimum of a function using gradient descent, one takes steps proportional to the negative of the gradient (or of the approximate gradient) of the function at the current point. If instead one takes steps proportional to the positive of the gradient, one approaches a local maximum of that function; the procedure is then known as gradient ascent.The constraint set of an optimization problem is usually specified in terms of equality an inequality constraints. If we take into account this structure, we obtain a sophisticated collection of optimality conditions, involving some auxiliary variables called Lagrange multipliers. Thesevariables facilitate the characterization of optimal solutions, but also provide valuable sensitivity information, quantifying up to first order the variation of the optimal cost by variations in problem data. Two basic lines in Lagrange multipliers need to analysis: the penalty and the feasible direction.3.Mixed-integer Linear/Nonlinear ProgrammingMixed-integer linear/nonlinear programming is similar to linear/nonlinear programmingexcept different type of variables—MIPcontains integer variables as well as continuous variables. Besides, if the variables need to be 0 or 1(binary), it’s called 0-1 linear program. Mixed-integer linear/nonlinear programming becomes NP-complete to solve if we are allowed to specify constraints of a different kind: requiring that some variables be integers instead of real values. So there is no known polynomial-time algorithm.For mixed-integer linear programming, solution is unlikely to lie on boundary of continuous feasibility region. As a consequence,the optimum of problem must be no better than before. If we solve the MILP via treating it as a linear programming firstly, how to get from this solution to an integer solution? Assume integer variables have lower and upper bounds. If in optimal solution of LP all integer variables take integer values, then it is also an optimal solution to MILP. Else, rounding the solution of LP may yield to non-optimal or non-feasible solutions. Therefore, what’s needed more to elaborate is branch & bound. We can build a binary tree of subproblems whose leaves correspond to pending problems still to be solved, with terminal condition as integer variables have finite bounds and at each split, range of one variable becomes strictly smaller.Certainly, the pruning of the search tree has a huge impact on the efficiency of branch & bound.For mixed-integer programming,a classical problem in scheduling is the unit commitment problem. In this problem, our task is to turn on and off power generating plants in order to meet a forecasted future power demand, while minimizing the generation side costs. It has several different power plants with different characteristics and running costs, and various constraints on how they can be used. The decision to determine whether generations turn on or off is integer variables. If the generation cost is modeled as a nonlinear formulation, it is a mixed-integer nonlinear optimization problem. The constraints often includes energy balance constraints, facility performance constraints andfacility capacity constraints.Some heuristic optimization algorithms can be used to solve such complicatedoptimization, such as GA, PSO, hybrid optimization strategy and so on. I usually apply these methods through matlab toolbox. But these tools may not find the best global solution but a “good” solution. Nevertheless, these methods have advantage of a quick speed of problem solving ability. So they are widely applied now.。
运筹学大M法
运筹学大M法运筹学大M法是一种经典的运筹学方法,在数学建模中被广泛应用。
它的全称是Mixed Integer Linear Programming,即混合整数线性规划,主要解决的是有约束条件下的最优化问题。
运筹学大M法使用了约束条件、决策变量和目标函数三个要素,可以用数学形式进行表示和求解。
假设我们有一组决策变量x1,x2,...,xn,它们需要满足一些约束条件,同时要最大化或最小化目标函数f(x1,x2,...,xn)。
在大M法中,我们将相应的约束条件用等式或不等式进行表示:等式约束条件:a1*x1 + a2*x2 + ... + an*xn = b目标函数:max[f(x1,x2,...,xn)] 或 min[f(x1,x2,...,xn)]在这里,a1,a2,...,an,c1,c2,...,cn和b,d都是确定的常数。
同时,决策变量xi也可以是整数或者二进制变量。
为了求解这个最优化问题,我们需要首先将不等式约束式转化为等式形式。
在这个过程中,我们需要加入一些松弛变量(也叫做slack变量)来确保约束条件可以满足。
假设第i个不等式为:然后我们将这个不等式转化成等式形式:其中,s1是松弛变量。
类似地,我们可以将每个不等式约束条件都转化成等式形式。
在这个过程中,我们需要加入一些约束条件来限制决策变量xi的取值。
如果xi可以为任意实数,那么我们不需要这些额外的约束条件。
但是,如果xi是整数或者二进制变量,我们需要加入一些约束条件来限制它们的取值范围。
为了限制整数变量xi的取值范围,我们通常会引入两个新的变量:yi和zi。
yi表示xi是否等于下限值,zi表示xi是否等于上限值。
我们可以通过以下约束条件来实现这一点:xi >= li*yi其中,li是xi的下限,ui是xi的上限。
因此,如果yi=1,那么xi的取值就是li;如果zi=1,那么xi的取值就是ui。
如果既不是yi=1,也不是zi=1,那么xi就可以取任意整数值。
integer programming 教材

integer programming教材【释义】integer programming整数规划:一种数学优化或可行性问题,其中一些或全部变量被限制为整数。
【短语】1Mixed Integer Programming数混合整数规划;混合整数编程;混合整数规划问题;规划方法2zero-one integer programming数零一整数规划3integer programming algorithm整数规划算法;翻译4Pure Integer Programming纯整数规划;规划问题5All Integer Programming整数规划60-1integer programming整数规划;规划7Mixed integer programming model混合整数规划模型;规划模式8integer programming problem整数规划问题【例句】1Scheduling;Open shop;Mixed integer programming.排程;开放型工厂;混整数规划。
2The scheduling is formalized as a integer programming problem.该描述将调度问题形式化为整数规划问题。
3It is to understand the basis for other integer programming problem.它是理解其它整数规划问题的基础。
4The problem of bounded nonlinear mixed integer programming is studied.对一有界约束非线性混合整数规划问题进行了研究。
5The number of the most optimal solutions of this integer programming is determined.给出了一类整数规划问题有唯一最优解的充要条件。
最优化问题的混合整数规划算法研究及应用

最优化问题的混合整数规划算法研究及应用随着社会的快速发展和科技的不断进步,人们对于生产、经济、物流等方面的效率要求也越来越高。
这就催生了一个新的研究领域——最优化问题。
最优化问题是通过数学模型、算法、软件工具等手段,寻找最优解的过程。
其在人们的生产生活中,有着重要的应用价值。
其中,混合整数规划算法是最常用的一种优化方法,本文将探讨其研究与应用。
一、混合整数规划算法混合整数规划(Mixed Integer Programming,MIP)是一种决策问题的数学优化模型,它是将线性规划(Linear Programming,LP)与整数规划(Integer Programming,IP)相结合的方法。
混合整数规划在解决线性规划问题时,需要对某些变量进行限制,使它们只能采取整数值。
这类问题被称为混合整数线性规划问题(Mixed Integer Linear Programming,MILP)。
混合整数规划算法的核心思想是将问题模型转化为一个数学形式,并根据一定的规则求解出最优解。
它广泛应用于生产、物流、金融等领域。
例如,企业优化生产计划、物流配送网络、最优化资产配置等。
二、混合整数规划算法的研究现状混合整数规划算法的研究可以追溯到20世纪50年代。
随着计算机技术的不断发展,现代混合整数规划算法的研究也在不断深入。
其中,最基础和流行的求解混合整数规划问题的方法就是分支定界算法(Branch and Bound,BB)。
分支定界算法通过不断将问题划分为更小的子问题,并对子问题进行求解,找到最优解。
它是混合整数规划算法中的一个基础方法,并被广泛使用。
但是,由于其计算量大、时间复杂度高,随着问题规模的不断扩大,分支定界算法却变得难以应对。
针对此类问题,学者们提出了一些改进算法。
例如,利用启发式算法、割平面算法等对分支定界算法进行了改进,以期提高问题求解效率。
同时,研究者们也在探究新的算法,比如整合约束规划算法(Integrated Constraint Programming,ICP)、混合整数非线性规划算法(Mixed Integer Nonlinear Programming,MINLP)等。
哈尔滨工业大学运筹学教案整数规划

n个人指派n件事,共有n!中指派方案。
一、基本思想和算法依据 基本思想是:先求出相应的线性规划最优解,若此解不符合整数 条件,那么其目标函数的值就是整数规划问题最优值的上界,而任意 满足整数条件的可行解的目标函数值将是其下界(定界),然后将相 应的线性规划问题进行分枝,分别求解后续的分枝问题。如果后续分 枝问题的最优值小于上述下界, 则剪掉此枝; 如果后续某一分枝问题的 最优解满足整数条件,且其最优值大于上述下界,则用其取代上述下 界,继续考虑其它分枝,直到最终求得最优的整数解。 算法的依据在于:“整数规划的最优解不会优于相应的线性规划 问题的最优解”。具体说就是,对极大化问题,与整数规划问题相应 的线性规划问题的目标函数值,是该整数规划问题目标函数的上界; 任何满足整数条件的可行解的目标函数值将是其下界。
2014-9-4
管理运筹学课程组 ftp://211.71.69.239
1
解:设x1,x2分别表示两种A、B两种机器的购置台数,根据实际 机器台数应为整数,故该问题的优化模型为
max z 6 x1 4 x2 2 x1 4 x2 13 s.t.2 x1 x2 7 x , x 0且为整数 1 2
并分别加入LP问题的约束条件中, 得两个子LP规划问题LP-1, LP-2,
分别求解此两个子线性规划问题, 其最优.1, Z1=349
2014-9-4
LP-2: x1=5, x2=1.57, Z2=341 管理运筹学课程组 ftp://211.71.69.239
上述规划问题是整数规划问题。
放松整数约束的整数规划就成为线性规划,此线性规划被称之为 整数规划的线性规划松弛问题。这样,任何一个整数规划可以看 成是一个线性规划再加上整数约束构成的。
scipy linearoperator例子-概述说明以及解释

scipy linearoperator例子-概述说明以及解释1.引言1.1 概述LinearOperator是Scipy库中的一个重要模块,它提供了一种简洁而灵活的处理线性算子的方法。
线性算子是指具有线性性质的运算,可以将向量映射到另一个向量空间中。
LinearOperator模块通过定义一种抽象的线性算子类,使得用户能够以一种统一的方式去处理不同类型的线性算子。
与传统的线性代数计算相比,LinearOperator提供了更高效、更灵活的方式来处理大规模的线性问题。
它通过将线性算子抽象为一个矩阵-向量乘法操作,使得在处理大规模数据时能够节省存储空间和计算时间。
LinearOperator的一个重要特点是它支持延迟计算,即只在需要的时候才进行实际的计算操作。
这种延迟计算的特性使得在处理大规模数据时能够节省计算资源,并且能够轻松地与其他Scipy模块进行集成。
此外,LinearOperator还提供了一系列常见的线性算子变换和组合操作,如共轭、转置、相乘等。
这些操作使得用户能够方便地构建复杂的线性算子,并能够灵活地适应不同的应用场景。
在本文中,我们将介绍LinearOperator的基本概念和作用,以及它在科学计算、信号处理、优化等领域中的常见应用。
我们将通过一些具体的例子来展示LinearOperator的用法,并讨论它的优势和局限性。
最后,我们将展望LinearOperator的未来发展,探讨它在大数据时代的应用前景。
通过阅读本文,读者将能够全面了解LinearOperator的概念、用法和意义,并能够灵活地运用它来解决实际问题。
1.2 文章结构本文将围绕Scipy的LinearOperator模块展开讨论,旨在介绍LinearOperator的基本概念、作用以及常见的用法和应用场景。
文章结构主要分为引言、正文和结论三个部分。
引言部分将概述本文的主题内容,即介绍Scipy的LinearOperator 模块,并说明本文的目的。
供应链网络规划中的混合整数线性规划研究
供应链网络规划中的混合整数线性规划研究在供应链管理中,规划合理的供应链网络是实现高效运作和满足客户需求的关键。
供应链网络规划涉及到多个决策变量和约束条件,因此混合整数线性规划(Mixed Integer Linear Programming, MILP)方法成为解决这类问题的主要工具之一。
本文将重点分析供应链网络规划中混合整数线性规划的研究进展,并探讨其在实践中的应用。
首先,混合整数线性规划是一种数学建模技术,用于解决决策变量既包括整数变量又包括连续变量的优化问题。
在供应链网络规划中,决策变量可能包括生产量、运输路线、仓库位置等,这些变量往往是离散的,即必须为整数。
而供应链网络规划中的目标往往是最小化总体成本、最大化服务水平或最优化运输路径等。
混合整数线性规划通过建立数学模型,对这些变量和目标进行数学描述,并找出满足约束条件的最优解。
其次,供应链网络规划中混合整数线性规划的研究主要围绕以下几个方面展开。
首先是供应链网络设计。
供应链网络设计涉及到制定供应商选择、仓库位置、仓库容量等决策。
通过建立混合整数线性规划模型,可以帮助决策者在不同地点、不同供应商间进行选择,并且优化仓库位置和容量规划,从而实现整个供应链网络的高效运转。
其次是运输路径规划。
供应链中的物流运输是非常重要的一环,决策者需要确定最优的运输路径以确保物品能够以最短的时间、最低的成本从供应商到用户。
混合整数线性规划方法可以帮助确定最佳的运输路径,考虑到路线、仓库容量、物流成本等因素,从而实现供应链网络的高效运作。
第三是库存管理。
库存是供应链管理中的一个关键环节,对于降低库存成本、提高服务水平非常重要。
混合整数线性规划方法可以帮助决策者确定最优的库存策略,包括何时订购、何时补充库存等,从而实现供应链网络的高效库存管理。
最后是生产计划与调度。
在供应链网络中,生产计划与调度是一个复杂的问题,决策者需要在满足市场需求的同时最大化产能利用率和最小化生产成本。
非线性规划问题的混合整数模型及求解算法研究
非线性规划问题的混合整数模型及求解算法研究非线性规划(Nonlinear Programming,NLP)问题是指目标函数或约束条件中至少存在一个非线性函数的优化问题。
而混合整数规划(Mixed Integer Programming,MIP)问题是指在线性规划的基础上,还包含了整数(或整数和0-1变量)的优化问题。
在实际应用中,很多问题涉及到同时考虑连续变量和离散变量的情况,即混合整数非线性规划(Mixed Integer Nonlinear Programming,MINLP)问题。
解决MINLP问题具有很高的理论和实际意义,但由于其复杂性,一直以来都是计算最困难的类型之一。
针对非线性规划问题的混合整数模型及其求解算法的研究,可以从下面几个方面展开:1. 混合整数非线性规划问题的数学建模混合整数非线性规划问题的数学建模是研究的基础,通过将实际问题转化为数学模型,可以更好地理解和解决问题。
在建模过程中,需要考虑目标函数、约束条件和决策变量等因素,确保模型的准确性和可行性。
2. 混合整数非线性规划问题的求解算法针对混合整数非线性规划问题的求解算法,有许多经典的方法可以利用。
比较常用的方法包括分支定界法、割平面法、列生成法、松弛法等。
这些算法可以根据实际问题的特点选择合适的方法进行求解,并提高求解效率和准确性。
3. 混合整数非线性规划问题的应用领域混合整数非线性规划问题的应用领域广泛,包括生产计划、资源分配、供应链优化、网络设计等。
对于不同的应用领域,需要结合实际情况对模型和算法进行特定的定制和优化,以更好地解决实际问题。
4. 混合整数非线性规划问题的软件工具和案例分析市场上有许多专门用于求解混合整数非线性规划问题的软件工具,比如GAMS、AMPL等。
通过对这些工具的学习和实际案例的分析,可以更好地理解混合整数非线性规划问题的求解方法和技巧。
5. 混合整数非线性规划问题的研究前景和挑战对于混合整数非线性规划问题的研究还存在许多挑战,如精确解和近似解的求解、多目标优化、不确定性建模等。
Mixed integer programming

11
• The trick: “big-M” method • Let M ∈ R be some big number and consider the constraint (xi )1 ≤ a1 + zM for z ∈ {0, 1}; if z = 0, this is the same as the original constraint, but if z = 1 then constraint will always be satisfied • Introduce new variables zi1 , zi2 , zi3 , zi4 for each xi (xi )1 ≤ a1 + zi1 M (xi )1 ≥ b1 − zi2 M xi ∈ O ⇐⇒ (xi )2 ≤ a2 + zi3 M (xi )2 ≥ b2 − zi4 M z i1 + z i2 + z i3 + z i4 ≤ 3
3
Mixed integer programs
• A special case of non-convex optimization methods that lends itself to a combination of search and convex optimization minimize f (x, z )
14
Solution via enumeration
• Recall that optimization problem minimize f (x, z )
x,z
subject to gi (x, z ) ≤ 0 i = 1, . . . , m zi ∈ {0, 1}, i = 1, . . . , p is easy for a fixed z (then a convex problem) • So, just enumerate all possible z ’s and solve optimization problem for each • 2p possible assignments, quickly becomes intractable
Mixed-integer quadratic programming

MIXED-INTEGER Rafael LAZIMY
QUADRATIC
PROGRAMMING*
The Hebrew University, Jerusalem, Israel Received 23 April 1980 Revised manuscript received 28 January 1981 This paper considers mixed-integer quadratic programs in which the objective function is quadratic in the integer and in the continuous variables, and the constraints are linear in the variables of both types. The generalized Benders' decomposition is a suitable approach for solving such programs. However, the program does not become more tractable if this method is used, since Benders' cuts are quadratic in the integer variables. A new equivalent formulation that renders the program tractable is developed, under which the dual objective function is linear in the integer variables and the dual constraint set is independent of these variables. Benders' cuts that are derived from the new formulation are linear in the integer variables, and the original problem is decomposed into a series of integer linear master problems and standard quadratic subproblems. The new formulation does not introduce new primary variables or new constraints into the computational steps of the decomposition algorithm. Key Words: Quadratic Programming, Mixed-Integer Quadratic Programming, Quadratic Duality Theory, Generalized Benders Decomposition, Integer Linear Programs, Generalized Inverses.
clpex,GLPK,lpsolve,yalmip简介与教程
最近建立了一个网络流模型,是一个混合整数线性规划问题(模型中既有连续变量,又有整型变量)。
当要求解此模型的时候,发现matlab优化工具箱竟没有自带的可以求解这类问题的算法(只有bintprog求解器,但是只能求解不含连续变量的二值线性规划问题)。
于是在网上找了一些解决问题的途径,下面说说几种可能的解决方案。
cplex首先想到的是IBM公司大名鼎鼎的cplex。
cplex是IBM公司一款高性能的数学规划问题求解器,可以快速、稳定地求解线性规划、混合整数规划、二次规划等一系列规划问题。
CPLEX 的速度非常快,可以解决现实世界中许多大规模的问题,它能够处理有数百万个约束(constraint) 和变量 (variable) 的问题,而且一直刷新数学规划的最高性能记录。
他的标准版本是一个windows 下的IDE应用软件,但是开发人员能通过组件库从其他程序语言调用CPLEX 算法。
随标准版本一起发布的文件中包含一个名为matlab文件夹,将此文件夹添加到matlab的搜索路径下就可以在matlab下调用cplex高效地求解数学规划问题。
cplex IDE主界面(是不是很熟悉的界面?没错,cplex也是基于eclipse插件机制开发的。
):CPLEX Optimizer中文介绍:/components/detailvi ew.aspx?id=ce16c50e-0059-417b-9806-c8b1d3224084官方网址:/components/detailview.aspx?id=ce16c 50e-0059-417b-9806-c8b1d3224084遗憾的是,cplex是一款商业软件,可以从以上官方网址上下载免费试用版,使用时限是90天,而且试用版对问题规模有限制(我的问题有300个变量,370个约束,结果因为问题规模限制无法用试用版求解)。
如果你要用cpl ex解决问题的话,可能还需要学习特定于cplex的建模语言。
线性规划与整数规划模式Linear and Integer Programming
1000
700
500
紅色線段
Profit =$1250
X2 由任一個 profit開始, say profit = $1,250. 往利潤增加方向移動 increase the profit, if possible... 持續平行移動到無法增加為止 continue until it becomes infeasible
700
Total production 限制式
X1+X2 700 (多餘)
500
Infeasible
Production
Feasible
Mix限制式
X1-X2 350
Time 限制式
3X1+4X22400
500 700
內部點Interior points. 邊界點 Boundary points.
可行區域 FEASIBLE REGION
13
圖形表示法(graphical presentation) ―所有限制式(all the constraints) ―目標函數(objective function) ―可行點(three types of feasible points)
14
圖形分析 – 可行區域 Graphical Analysis – the Feasible Region
非束縛方程式(Non-Binding Constraints):最佳點不在其等式之限制式 寬鬆(Slack):限制式右邊與左邊的差額,代表資源的剩餘數量
21
端點與最佳解 (p.72) Extreme points and optimal solutions
– 若一個線性規劃問題有一組最佳解,此最佳解一 定發生在”端點”上 (端點最佳解之候選人,True/False)
intlinrog函数用法及例题

intlinprog是Matlab中用于求解混合整数线性规划(Mixed-integer linear programming)的一个函数。
该函数用法基本和linprog差不多,只是在linprog的基础上多了一个参数intcon,代表了整数决策变量所在的位置。
intlinprog函数的基本语法为:x=intlinprog(f,intcon,A,b,Aeq,beq,lb,ub)。
与linprog相比,多了参数intcon,代表了整数决策变量所在的位置。
其中:f是目标函数系数向量;intcon是整数变量的下标;A、b是不等式约束条件系数矩阵和右端向量;Aeq、beq是等式约束条件系数矩阵和右端向量;lb、ub是变量的下界和上界。
具体使用方法如下:例1:求解整数规划。
求解代码:f=[-5 -8]; A=[11;59]; b=[645]; lb=zeros(2,1); intcon=[12];[x,fval]=intlinprog(f,intcon,A,b,[],[],lb,[]); x,fval=-fval。
所得结果为:x=[0;7],fval=56。
例2:求解0-1规划。
求解代码:f=[-6 -2 -3]; A=[1 1 1]; b=[10]; lb=zeros(3,1); ub=ones(3,1); intcon=1:3; [x,fval]=intlinprog(f,intcon,A,b,[],[],lb,ub); x,fval=-fval。
所得结果为:x=[1;0;0],fval=6。
注意:在使用intlinprog函数之前,需要确保已经安装了Optimization Toolbox。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Chen and Mahmassani [1993] and Van Aerde et al [1989] have constructed more macroscopic simulations in which vehicle speeds are determined by static speed functions applied to some average congestion level, but these approaches may produce link inconsistency (i.e. violation of first-in first-out, which is unreasonable in a deterministic model) and take limited account of the dynamic character of the problem. Janson [1989,1991] takes a similar approach in a nonlinear integer programming model with a mixed discrete/continuous time character; the model can also suffer from inconsistency and the discretization is based on relatively long intervals, again limiting the degree of dynamic character. Merchant and Nemhauser [1978], Carey [1987, 1990], Friesz et al 1989], Wie et al [1990], and Wie [1991] have proposed models where nonunique (i.e. dispersionary) link travel times are determined implicitly by link outflow functions, which give the number of vehicles to depart a link as a function of instantaneous link volume. Link outflow functions, although relatively tractable analytically, have the undesirable tendency to manifest flow rates which increase with congestion. Ran et al [1993, 1994] represent outflow rates as decision variables constrained by compound link travel time functions (distance traversal time plus queueing delay). However, the values of these link travel times are approximated by an iterative process in which each iteration itself requires iterative solution of an nonlinear optimization problem of traffic assignment in the network of interest. In this paper, we formulate a macroscopic model that implicitly views the assignment problem as decomposed into two stages. First is the selection of time dependent link volumes, and second is the assignment of routes that optimally utilize those volumes. Since link volumes and speeds are related in a one to one fashion through link impedance functions, the first choice is equivalent to selecting a time dependent number of time periods corresponding to desired link travel times. This choice is modeled by integer valued variables. The resulting assignment problem then becomes a multicommodity network flow problem which we formulate as an ordinary linear program. The resulting mathematical program is called a mixed integer linear program or MILP. There exists an algorithm for solving such a formulation called the Branch-and-Bound algorithm (Murty [1976]). However, based upon our computational experience in solving a four node network problem as reported in section 4, an exact solution by Branch-and-Bound can only be expected for small scale networks. The principal contributions of the model offered in this paper derive at this point from its 3
∗
This work was supported in part by the Intelligent Transportation Systems Research Center of Excellence
at the University of Michigan
1
formulation of the problem which is formally derived from a set of traffic flow assumptions. Principal among these is the simplifying assumption that vehicles upon entering a link assume the speed that traffic would attain were the traffic volume encountered on that link in steady-state. The integer variables correspond to selection of vehicle capacity constraints on the link while the continuous variables correspond to selection of vehicle routes. Implicit within this MILP formulation of the dynamic traffic assignment problem is therefore a decomposition of the problem that results in a conventional capacitated linear programming network flow problem. A small illustrative subnetwork extracted from the city of Sioux Falls is solved to optimality by IBM’s OSL Branch-and-Bound algorithm.
Department of Industrial and Operations Engineering University of Michigan, Ann Arbor, Michigan 48109
December 16, 1997
Abstract One of the major challenges facing ITS (Intelligent Transportation Systems) today is to offer route guidance to vehicular traffic so as to reduce trip time experienced. In a cooperative route guidance system, the problem becomes one of assigning routes to vehicles departing at given times from a set of origins to a set of destinations so as to minimize the average trip time experienced (a so-called system optimal criterion) Since the time to traverse a link will depend upon traffic volume encountered on that link, link times are dynamic. The complex interaction resulting between objective function and constraints makes the dynamic problem significantly more difficult to formulate and solve than the static version. We present a mixed integer linear programming