mot-06_subgradients
A meta-heuristic algorithm for heterogeneous fleet vehicle routing problems

Discrete OptimizationA meta-heuristic algorithm for heterogeneous fleet vehicle routing problems with two-dimensional loading constraintsStephen C.H.Leung a ,Zhenzhen Zhang b ,Defu Zhang b ,⇑,Xian Hua b ,Ming K.Lim caDepartment of Management Sciences,City University of Hong Kong,Hong Kong bDepartment of Computer Science,Xiamen University,Xiamen 361005,China cDerby Business School,University of Derby,Derby,UKa r t i c l e i n f o Article history:Received 18October 2011Accepted 16September 2012Available online 3October 2012Keywords:Routing PackingSimulated annealing Heterogeneous fleeta b s t r a c tThe two-dimensional loading heterogeneous fleet vehicle routing problem (2L-HFVRP)is a variant of the classical vehicle routing problem in which customers are served by a heterogeneous fleet of vehicles.These vehicles have different capacities,fixed and variable operating costs,length and width in dimension,and two-dimensional loading constraints.The objective of this problem is to minimize transportation cost of designed routes,according to which vehicles are used,to satisfy the customer demand.In this study,we proposed a simulated annealing with heuristic local search (SA_HLS)to solve the problem and the search was then extended with a collection of packing heuristics to solve the loading constraints in 2L-HFVRP.To speed up the search process,a data structure was used to record the information related to loading feasi-bility.The effectiveness of SA_HLS was tested on benchmark instances derived from the two-dimensional loading vehicle routing problem (2L-CVRP).In addition,the performance of SA_HLS was also compared with three other 2L-CVRP models and four HFVRP methods found in the literature.Ó2012Elsevier B.V.All rights reserved.1.IntroductionThe vehicle routing problem (VRP)was firstly addressed by Dantzig and Ramser (1959),proposing the most cost-effective way to distribute items between customers and depots by a fleet of vehicles.Taking into account of the attribute of the fleet,the tra-ditional VRP has evolved to different variants.Amongst them in-clude CVRP (homogenous VRP)that only considers a constraint of vehicles having the same limited capacity (Rochat and Taillard,1995),HVRP (heterogeneous VRP)that serves customers with dif-ferent types of vehicles (Golden et al.,1984;Gendreau et al.,1999;Lima et al.,2004;Prins,2009;Brandao,2011),VRPTW (VRP with time windows)that requires the service of each customer to start within the time window subject to time windows constraints (Kolen et al.,1987);and SDVRP (split deliver VRP)that allows more than one vehicle serving a customer (Chen et al.,2007).Readers are to refer to Crainic and Laporte (1998)and Toth and Vigo (2002)for a detailed description of VRP and its variants.To solve the VPR variants above effectively,a number of metaheuristics have been applied,such as simulated annealing (Osman,1993),Tabu search (Brandao,2011;Gendreau et al.,1999),genetic algorithms (Lima et al.,2004),variable neighborhood search (Imran et al.,2009),and ant colony optimization (Rochat and Taillard,1995;Li et al.,2009).In the real world,logistics managers have to deal with routing and packing problems simultaneously.This results in another domain of VRP to be investigated.In the literature,there are a number of frameworks proposed to address these two problems simultaneously.Iori et al.(2007)addressed the VRP with two-dimensional packing constraints (2L-CVRP)with an algorithm based on branch-and-cut technique.Gendreau et al.(2008)proposed a Tabu search heuristic algorithm to solve large instances with up to 255customers and more than 700items in the 2L-CVRP.Zachariadis et al.(2009)developed a new meta-methodology guided Tabu search (GTS)which can obtain better results.In this work,a collection of packing heuristics was proposed to check the loading feasibility.Fuellerer et al.(2009)presented a new ant colony optimization algorithm deriving from saving-based ant colony opti-mization method and demonstrated its performance to successfully solve the 2L-CVRP.More recently,Leung et al.(2011)developed a new efficient method that consists of a series of algorithms for two-dimensional packing problems.The method has proven its capability to improve the results of most instances used by Zachariadis et al.(2009).Duhamel et al.(2011)proposed a GRASP ÂELS algorithm for 2L-CVRP,whereby the loading constraints were transformed into resource constrained project scheduling problem (RCPSP)constraints before a packing problem can be solved.However,only basic CVRP and Unrestricted version0377-2217/$-see front matter Ó2012Elsevier B.V.All rights reserved./10.1016/j.ejor.2012.09.023Corresponding author.Tel.:+865922582013;fax:+865922580258.E-mail address:dfzhang@ (D.Zhang).of2L-CVRP were solved with their algorithm.Some researchers have extended their heuristics to three-dimensional problems. Gendreau et al.(2006)proposed a multi-layer Tabu search algorithm that iteratively invokes an inner Tabu search procedure to search the optimal solutions of a three-dimensional loading sub-problem.Tarantilis et al.(2009)used a guided Tabu search (GTS)approach with a combination of six packing heuristics to solve 3L-CVRP.In their work,a manual unloading problem was also tested.Furthermore,Fuellerer et al.(2010)also proposed their methods to deal with three-dimensional loading constraints.In addition,Iori and Martello(2010)provided a review in regard to vehicle routing problems with two and three-dimensional loading constraints.Since most enterprises own a heterogeneousfleet of vehicles or hire different types of vehicles to serve their customers,it is there-fore crucial to study VRP with afleet of heterogeneous vehicles.The heterogeneousfleet VRP(HFVRP)addresses the VRP with a hetero-geneousfleet of vehicles which have various capacities,fixed costs and variable costs(Choi and Tcha,2007;Imran et al.,2009).In the literature,three versions of HFVRP have been studied.Golden et al. (1984)considered the variable costs to be uniformly spread across all vehicle types and the availability of each type of vehicle to be unlimited.Gendreau et al.(1999)considered the different variable costs for different types of vehicle.The third HFVRP was introduced by Taillard(1999)and Tarantilis et al.(2004),in which the number of available vehicles of each type is limited.Recently,Penna et al. (2011)introduced an Iterated Local Search,combined with a Vari-able Neighborhood Decent procedure and a random neighborhood ordering(ILS-RVND),to solve all variants of HFVRP.In this paper,we combined the HFVRP with two-dimensional loading constraints,called the heterogeneousfleet vehicle routing problems with two-dimensional loading constraints(2L-HFVRP). However,to the best of our knowledge,no work has been con-ducted to address such VRP although it is a practical problem in real-world transportation and logistics industries.In2L-HFVRP, there are different types of vehicles with different capacity,fixed cost,variable cost,length and width in vehicle dimension,andtwo-dimensional loading constraints.The demand of a customer is defined by a set of rectangular items with given width,length and weight.All the items belonging to one customer must be as-signed to the same route.The objective is to describe the minimum transportation costs with a function of the distance travelled,fixed and variable costs associated with the vehicles.This paper presents a simulated annealing(SA)algorithm for 2L-HFVRP.In the literature SA has been proven to be an effective method to solve combinatorial optimization problems and it has been successfully applied to2L-CVRP(Leung et al.,2010).In this paper,a heuristic local search is used to further improve the solu-tion of SA.In addition,six promising packing algorithms,whereby five were developed by Zachariadis et al.(2009)and one by Leung et al.(2010),are also used to solve the loading constraints in 2L-HFVRP.These algorithms are extensively tested on benchmark instances derived from the2L-CVRP test problems with vehicles of different capacity,fixed and variable costs,length,and width. The comparison with several effective methods of the2L-CVRP and pure HFVRP is also given.2.Problem descriptionThe2L-HFVRP is defined on an undirected connected graph G=(V,E),where V={0,1,...,n}is a vertex set corresponding to the depot(vertex0)and the customers(vertices1,2,...,n)and E={e ij:i,j2V}is an edge set.For each e ij2E,a distance d ij (d ii=0)is associated.Afleet of P different types of vehicles is lo-cated at the depot,and the number of vehicles of each type is unlimited.Capacity Q t,fixed cost F t,variable cost V t,length L t andwidth W t are associated to each type of vehicle t(t=1,2,...,P). The loading surface of vehicle of type t is A t=L tÃW t.On the basis that a vehicle with larger capacity usually has higher cost and greater fuel consumption,we assume that Q16Q26ÁÁÁ6Q P,F1-6F26ÁÁÁ6FPand V16V26ÁÁÁ6V P.The traveling cost of eachedge e ij2E by a vehicle type t is Cij t¼V tÃd ij.The transportation cost of a route for vehicle type t is C R¼F tþP i<j R ji¼1V tÃd RðiÞ;Rðiþ1Þ, where R is the route whose start point and end point are the depot. Each customer i(i=1,2,...,n)demands a set of m i rectangular items,denoted as IT i,and the total weight of IT i equals to D i.Each item I ir2IT i(r=1,2,...,m i)has a specific length l ir and width w ir.We also denote a i¼P m ir¼1w irÃl ir as the total area of the items of customer i.In2L-HFVRP,a feasible loading must satisfy the fol-lowing constraints:(i)All items of a given customer must be loaded on the samevehicle and split deliveries are not allowed.(ii)All items must have afixed orientation and must be loaded with their sides parallel to the sides of the loading surface. (iii)Each vehicle must start andfinish at the depot.(iv)Each customer can only be served once.(v)The capacity,length and width of the vehicle cannot be exceeded.(vi)No two items can overlap in the same route.The objective of2L-HFVRP is to assign customer i(i=1,2,...,n) to one of the routes,so that the total transportation cost is mini-mized and all the routes fulfill the constraints.In this paper,we200S.C.H.Leung et al./European Journal of Operational Research225(2013)199–210consider two versions of2L-HFVRP which is the same as2L-CVRP: the Unrestricted only deals with feasible loading of the items unto the vehicles,and the Sequential considers both loading and unload-ing constraints(e.g.when visiting a customer,his/her items can be unloaded without the need to move items that belong to other cus-tomers in the same route).Fig.1gives an example of the two versions.3.The optimization heuristics for two-dimensional loading problemsFor a given route,it is necessary to determine whether all the items required by the customers can be feasibly loaded onto the vehicle.In this paper,we willfirst investigate if the total weight of items demanded by the customers exceeds the capacity of the vehicle.Otherwise,six packing heuristics are used to solve the two-dimensional loading problem.As mentioned earlier,the load-ing position of an inserted item must be feasible,i.e.it must not lead to any overlaps(for both Unrestricted and Sequential prob-lems),or sequence constraint violations(for Sequential only).The firstfive heuristics Heur i(i=1,2,...,5)are based on the work by Zachariadis et al.(2009).Each heuristic loads an item in the most suitable position selected from the feasible ones according to the individual criterion as follows:Heur1:Bottom-leftfill(W-axis).The selected position is the one with the minimumW-axis coordinate,breaking ties by minimum L-axis coordinate.Heur2:Bottom-leftfill(L-axis).The selected position is the one with the minimumL-axis coordinate,breaking ties by minimum W-axis coordinate.Heur3:Max touching perimeter heuristic.The selected position is the one with the maximumsum of the common edges between the inserteditem,the loaded items in the vehicle,and the load-ing surface of the vehicle.Heur4:Max touching perimeter no walls heuristic.The selected position is the one with the maximumsum of the common edges between the inserteditem and the loaded items in the vehicle.Heur5:Min area heuristic.The selected position is the one with the minimumrectangular surface.The rectangular surface corre-sponding to the position at the circle point is shownon the left in Fig.2.More details of thesefive heuristics can be found inZachariadis et al.(2009).In order to handle a morecomplex system Heur6was also used,which wasproposed in Leung et al.(2010).Heur6:Maxfitness value heuristic.This heuristic gives a priority to a loading point if itcan decrease the number of corner positions whenwe place an item on the point.As a result,everytime an item is loaded,we will select the best load-ing point for the item,which would increase theprobability to obtain a better loading position.These six heuristics are called in sequence,which means if Heur1fails to produce a feasible loading solution,the more com-plex Heur i(i=2,...,6)will be called one at a time tofind the solu-tion.If a feasible solution is found,the loading process stops and the solution is stored.During the loading process,feasible loading positions are recorded.Atfirst,only the front left corner(0,0)is available.When an item is successfully inserted,four new positions are added onto the list,and the occupied and duplicated positions are removed.As shown in Fig.2,item D is inserted in the position shown by a circle and four new positions are created.The items are loaded one at a time according to a given sequence.Here,two orders(Ord1,Ord2)are generated.In a given route,each customer has a unique visit order.Ord1is produced by sorting all items by reverse customer visit order,and breaking ties by decreasing area.In Ord2,all items are simply sorted by decreasing area.Both orders will be evaluated by the six heuristics to search for feasible loading solutions.The pseudo-code for the packing heuristics is given in Table1.4.The simulated annealing meta-heuristics for2L-HFVRPSimulated annealing(SA)is a point-based stochastic optimiza-tion method,which explores iteratively from an initial solution to a better result(Cerny,1985;Kirkpatrick et al.,1983).The search mechanism of SA has a very good convergence,and it has been widely applied in solving various NP-hard problems.Each iterationTable1The pseudo-code for the packing heuristics.Is_Feasible(Route r)if total weight of all items exceeds the capacity thenreturn falseend ifsort the items to generate two orderings Ord1,Ord2for each ordering Ord i of the two orderings doif Heur1k Heur2k Heur3k Heur4k Heur5k Heur6thenreturn trueend ifend forreturn falseTable2The pseudo-code of SA_HLS for the2L-HFVRP.SA_HLS_2L-HFVRP(customer demands,vehicle information)Generate initial Order through sorting the customers by decreasing totalweightAssign_Vehicle(Order)to construct the initial solutionT k=T0,Iter=0//Iter is the number of iterationwhile stopping criteria not met dofor i=1to Len doif Iter<10thengenerate a new Order based on the old oneAssign_Vehicle(new Order)if the new solution is packing-feasible and better than the currentone thenaccept the new solution as current solutionend ifaccept the new Order based on the acceptance rule of SAend ifstochastically select NS from{NS1,NS2,NS3},then get a feasible solutionif new solution is better than the current one thenaccept the new solution as the current solutionelseaccept the new solution through the acceptance probability functionend ifLocal_Search(),and get a new feasible solutionif new solution is better than the best one thenreplace the current solution with this new oneend ifupdate the best solution when the solution is better than itend forT k=0.9ÃT k,Iter=Iter+1end whilereturn the best solutionS.C.H.Leung et al./European Journal of Operational Research225(2013)199–210201in SA generates a candidate solution using a neighborhood func-tion.This is a vital step to develop an efficient SA.However,in many cases,the neighborhood function alone is inadequate when seeking for a global optimum solution.In addition to the proposed SA,we also use heuristic local search algorithms to improve thesolutions.Therefore,our algorithm is denoted as SA_HLS.Some mechanisms are adopted to adjust the search trajectory.One important characteristic of SA is that it can accept a worse solution on a probabilistic manner,aiming to search for a better re-sult.With the initial temperature T 0,the temperature cooling sche-dule is T k =0.9ÃT k À1.For a specific temperature T k ,a sequence of moves are carried out,which is a Markov chain whose length is de-noted as Len .In every iteration,after applying the neighborhood function,if the new solution is better than the current solution (i.e.the cost is lower),then it is accepted.However,if the cost is higher,the new solution may be accepted subject to the accep-tance probability function p (T k ,S new ,S cur ),which depends on the difference between the corresponding cost values and the global parameter T k :p ðT k ;S new ;S cur Þ¼expcos t ðS cur ÞÀcos t ðS new Þkð1Þwhere S cur and S new represent the current solution and the new solu-tion respectively.Table 2provides a framework for the proposed SA_HLS methodology.4.1.Initial solutionGood initial solutions are often a key to the overall efficiency of the metaheuristic.We construct the initial solution focusing on the demand of the customers,so that the use of differenttypesTable 3The pseudo-code for assigning customers into vehicles.Assign _Vehicle (Order )iused [1,2,...,P ]={0}for each customer i in Order do while true doselect the vehicle k which is not tabu for i and has minimum (freeD k ÀD i )ÃF kinsert the customer i at the last position of route for vehicle k if !Is_Feasible (route )theniused [P ]=iused [P ]+1;//add a new vehicle with largest capacity Tabu this vehicle k for customer i elseif freeD k <MinD then //vehicle k cannot service any customeriused [t ]=iused [t ]+1//assuming the type of vehicle k is t ,add onenew vehicleend ifaccept the new route,and break the loop//start to assign successive customerend if end while end forreturn generated solutionTable 4The characteristics of items of Classes 2–5instances.Classm iVertical Homogeneous Horizontal LengthWidth Length Width Length Width 2[1,2][0.4L ,0.9L ][0.1W ,0.2W ][0.2L ,0.5L ][0.2W ,0.5W ][0.1L ,0.2L ][0.4W ,0.9W ]3[1,3][0.3L ,0.8L ][0.1W ,0.2W ][0.2L ,0.4L ][0.2W ,0.4W ][0.1L ,0.2L ][0.3W ,0.8W ]4[1,4][0.2L ,0.7L ][0.1W ,0.2W ][0.1L ,0.4L ][0.1W ,0.4W ][0.1L ,0.2L ][0.2W ,0.7W ]5[1,5][0.1L ,0.6L ][0.1W ,0.2W ][0.1L ,0.3L ][0.1W ,0.3W ][0.1L ,0.2L ][0.1W ,0.6W ]202S.C.H.Leung et al./European Journal of Operational Research 225(2013)199–210of vehicles can be maximized.Firstly,all of the n customers are sorted on decreasing value of D i(i=1,2,...,n),where D i is the total demand of customer i(i=1,2,...,n)and the sequence is re-corded as Order.Subsequently we assign the customers one at a time from the Order list to a vehicle.The decision of which vehi-cle is assigned to a given customer is based on the least value of (freeD kÀD i)ÃF k,where freeD k is the unused capacity and F k is the fixed cost of the current vehicle k(procedure Assign_Vehicle()). Because the number of each type of vehicle is unlimited,the pro-cedure alwaysfinds a feasible solution.Table3provides a pseu-do-code for the proposed Assign_Vehicle()algorithm.iused is an array presenting the number of used vehicles of different types.MinD is the minimal demand in all the customers.When assigning one customer i to vehicle k,the feasibility is examined to ensure the loading for the modified route is feasible.Other-wise,the assignment of customer i to vehicle k is forbidden and the procedure tries to assign the customer i to another vehicle.As shown in Table2,this procedure is used in SA.In each loop, a partial segment of Order is reversed to get a new Order.Then, we reassign the customers using this method.If a new solution is better than the current one,it becomes the new current solu-tion in order to adjust the search trajectory.This is assumed that previous solution does not have a good characteristic that can be improved easily.In order to obtain a better solution,the new Order is adopted based on the SA acceptance rule.After several steps of improvement by SA,the solution constructed is usually not comparable to the current one.So this method is only applied during thefirst ten iterations.Table5Dataset for different types of vehicle.Inst A B C DQ A L A W A F A V A Q B L C W C F C V C Q C L C W C F C V C Q D L D W D F D V D120101010 1.025151520 1.140252530 1.260402040 1.3 220101010 1.025151520 1.140252530 1.355402040 1.5 320101010 1.030151520 1.160402040 1.2420101010 1.040202020 1.160402030 1.251000101010 1.025******** 1.14000252530 1.36000402050 1.5 62000101010 1.025******** 1.14000402030 1.37200101010 1.0500151520 1.120002525120 6.0450040202508 8200101010 1.0500151520 1.120002525120 5.04500402025010 920101010 1.025151520 1.148402030 1.310200101010 1.0500151520 1.1200025251208.04500402025010 11200101010 1.0500151520 1.1200025251208.04500402025010 1220101010 1.025151520 1.140402030 1.3132000101010 1.05000151550 2.030,00040202001014500101010 1.01500151550 2.130002020400 3.2500040208005 155******** 1.01500151550 2.130002020400 3.2500040208005 1620101010 1.040202020 1.160402030 1.21720101010 1.025151520 1.140252530 1.360403040 1.4 182******** 1.0500202030 2.020********* 5.01920101010 1.040201020 1.160201530 1.2150402090 5.0 202000101010 1.04000201020 1.110,000301560 4.030,00040201508 2120101010 1.040201020 1.160201530 1.220040201208 2220101010 1.040201020 1.160201530 1.220040201208 2320101010 1.040201020 1.160201530 1.220040201208 2420101010 1.040201020 1.160201530 1.2100402060 3.2 2520101010 1.040201020 1.160201530 1.220040201208 2620101010 1.040201020 1.160201530 1.220040201208 2720101010 1.040201020 1.160201530 1.2100402060 3.2 2820101010 1.040201020 1.160201530 1.220040201208 29200101010 1.0500201030 2.0200040201208.03020101010 1.040201020 1.160201530 1.220040201208 3120101010 1.040201020 1.160201530 1.220040201208 3220101010 1.040201020 1.160201530 1.220040201208 3320101010 1.040201020 1.160201530 1.220040201208 3420101010 1.040201020 1.160201530 1.220040201208 35200101010 1.0400201020 1.51000402060 4.036100101010 1.020******* 1.1300302030 1.2400402040 1.3Table6Calibration experiment result for T0and Len.5152535S Sec tot S Sec tot S Sec tot S Sec totT0Unrest5266.65327.945159.32288.995094.74402.305111.83500.08 Seq5427.43461.795274.77510.395198.10580.955238.46680.853000500070009000LenUnrest5144.37383.375094.74402.305078.97779.145083.18968.25 Seq5328.87456.855198.10580.955206.401025.195191.071242.93S.C.H.Leung et al./European Journal of Operational Research225(2013)199–2102034.2.Neighborhood functionsIn our work,three types of move are used to step from the current solution to the subsequent solutions.They are noted as NS i(i=1,2,3).In each loop,one of them is selected ran-domly with equal probability.To explore a larger search space, a dummy empty vehicle is added for each type of vehicle.NS1is a type of customer relocation(Or-opt)(Waters,1987),which reassigns a customer from one route to another position on the same or different route(Fig.3).It is worth noting that relo-cation between two different routes can reduce the number of vehicles required.Waters(1987)introduced a‘‘swap’’type of route exchange which is represented by NS2(Fig.4).It is only applied to vehicles of the same type as swapping loads of heterogeneous vehicles could lead to an unfeasible route from a loading perspective. Therefore,customers’positions can only be exchanged in the cur-rent solution if they belong to vehicles of the same type.NS3is a variant of route interchange(2-opt)(Croes,1958;Lin, 1965).As for NS2,NS3only considers vehicles of the same type (Fig.5).If the selected customers are in the same route as depicted in Fig.5a,the positions of other customers between them (and including themselves)will be reversed.If they belong to dif-ferent routes as illustrated in Fig.5b,in each route from the se-lected customer to the last customer will be grouped as a block. Between the routes the blocks will be swapped.4.3.Heuristic local search mechanismIn order to improve the quality of the solution,we also apply a heuristic local search mechanism,which consists of three methods,to the proposed SA algorithm.It is worth noting that we only apply the mechanism to the best solution with a prob-ability of5%and this is aimed to obtain more efficient solutions within a shorter period of time.The local search methods adopt thefirst improvement criterion using the neighborhood func-tions mentioned in the previous section.Because this neighbor-hood is not operated on two randomly selected customers,we define this mechanism as heuristic local search.We denote the local search methods as LS i(i=1,2,3)according to the neighborhoods NS i(i=1,2,3).These three methods are ran-domly executed.Let us consider an instance with n customers and k vehicles.In LS1,the relocation move of one customer involves the reassign-ment of(n+k)positions.Hence,the complexity of examining NS1 neighborhood of a solution is O(n⁄(n+k)).For LS2,in the worst case whereby all customers are assigned to one type of vehicle, n2pairs of customers can be exchanged and therefore the complex-ity of NS2is O(n2).For LS3,as for LS2,the number of interchange points is(n+k),so the cardinality of pairs for interchange in NS3 is(n+k)2.As a result,examining NS3neighborhood requires O ((n+k)2)computational effort.In practice,the worst case hardly happened because the customers are usually spread out across dif-ferent types of vehicle.Table8Average computational results of Classes2–5for Sequential2L-HFVRP.Inst SA SA_HLS%Gap S Sec h Sec tot S Sec h Sec tot 1678.497.7323.43603.15 5.7331.0411.10 2753.70 6.4321.53705.03 6.0931.28 6.46 3866.5620.8941.05771.8110.3536.6110.93 4796.2822.9340.76704.878.7135.1911.48 5944.8734.6849.07802.569.3527.6215.06 6901.4425.3345.42834.769.9243.907.40 76634.1357.8694.405770.83 1.9531.4013.01 87064.9227.5274.115633.04 4.7737.4220.27 91181.8648.3956.421047.6015.7468.8411.36 108695.22114.15194.217730.73 5.8751.7811.09 119789.89171.07225.858491.9410.0758.8813.26 121707.9915.1123.731681.6132.90158.45 1.54 1335464.18183.90287.9326761.40 6.7165.3424.54 1412027.5546.68112.0511120.3011.2955.627.54 1512871.23118.99190.7211916.3024.53148.507.42 161437.7411.1545.811291.2425.73113.0210.19 172037.0124.8735.341775.4943.41198.8312.84 188364.54344.74600.495790.6230.50138.0330.77 196186.88369.25781.224303.2651.44233.9830.45 209586.34941.001534.626215.4898.14217.7335.16 2114457.73811.101613.928494.36124.15443.8541.25 2215677.581090.281798.928867.10110.40353.4043.44 2315533.281078.921615.038544.30130.44386.8244.99 246756.02595.331092.094714.08104.98287.0230.22 2522864.752937.973155.7411602.30186.28605.5349.26 2620622.13875.112351.0612380.30153.21392.2639.97 279652.102343.762607.825882.75240.04502.4039.05 2841547.502484.484178.8123585.60393.72737.3543.23 2942142.583444.275609.8122938.80486.551045.6945.57 3036243.783609.867783.7316489.70536.781033.7954.50 3149143.853493.4611927.0922033.001110.801531.2855.17 3249142.654755.4512121.4820982.701040.061487.7457.30 3350660.653911.4612173.2721906.601087.931326.9856.76 3425388.93780.5514154.5615005.001680.671887.4140.90 3512902.48160.3217513.849313.541722.961877.5627.82 366279.65256.3716302.744567.292035.082052.9927.27 Avg.27.46Table7Result comparison of SA_HLS and SA on Class1.Inst SA SA_HLS%GapS Sec h Sec tot S Sec h Sec tot1665.64 6.41162.40596.0729.7833.5910.452732.8539.30159.30679.18 5.0532.017.323813.87162.92182.44745.5112.3954.248.404745.50142.72184.50694.33 6.1518.36 6.865916.40214.52226.97761.19 5.6226.9916.946814.8520.02192.53809.56 4.7725.650.6573387.06159.89215.363211.53 3.6729.76 5.1883359.77212.59215.033184.45 3.2124.30 5.2291144.65120.11219.141029.957.3940.2810.02105400.74108.70274.945149.51 6.9725.88 4.65115465.11217.80279.005119.40 6.9726.47 6.33121699.5917.67261.111658.5635.8092.80 2.411319390.0056.72275.6714655.40 1.9332.1824.421410447.1039.97305.7710019.0013.5173.21 4.101510546.9042.11304.9210151.70 5.4955.29 3.75161391.84108.34297.561292.5817.9476.927.13171963.5853.33411.941770.8338.88225.599.82184055.02343.92363.923140.5513.5435.3522.55191980.40205.31445.781553.1132.56107.8121.58203244.47277.20719.061956.9756.0071.5739.68215330.48428.97703.952567.1875.00195.6651.84225934.32160.30699.752605.9076.39174.7256.09235811.71404.05711.092643.8493.99239.2954.51244257.31289.19696.342555.4163.98156.4139.98255960.19248.30908.832972.59129.04253.0950.13265515.4843.45804.554049.6488.09180.2326.58275093.65426.08905.033561.58159.20230.4930.08287944.7382.841103.066858.35125.60161.0513.672915643.10822.161222.339695.00139.73142.6338.023011320.50992.751500.935663.33242.15259.8349.973119297.801754.361946.538054.90325.51483.4458.263217767.80732.971965.678408.61379.53410.8652.683318325.90696.911962.118555.58368.50486.2553.31345713.851406.471998.505536.63323.50425.80 3.10354875.690.981793.804444.59324.64401.588.84364961.221723.82322.953669.89555.13605.3126.03Avg.23.07204S.C.H.Leung et al./European Journal of Operational Research225(2013)199–210。
柔性检查作用域套件-USB 产品说明书
lInstructions for Use: Flexible Inspection Scope Kit-USB Brand Name of ProductFlexible Inspection Scope Kit - USB Generic Name of ProductFlexible Inspection Scope Kit - USB Product Code Number(s)FIS-007U, FIS-007USK, FIS-007UB, CT-101, CT-102Intended UseFor visually inspecting items.Range of Applications for ProductEnhance visual inspection by providing lighted magnification, image capture and the option for documentation in hard-to-see crevices, channels, and lumens in areas of instruments that are not visible to the unaided eye.Key Specifications of Product Flexible Inspection Scope- FIS-007U∙CT-101 1.90 mm OD and 110 cm length∙CT-102 1.06 mm OD and 110 cm length∙Opticalo Resolution format:o CT-102 1.06 mm: 40,000 pixels (or 200- x 200 pixels)o CT-101 1.90 mm: 160,000 pixels (or 400- x 400 pixels)o Field of View: 120° in airo Angle of view: 0°USB Control Module: Control Module housing Camera processor and LEDillumination:∙Dimensions: 5.25- x 3.90- x 1.85 inches∙Weight: 1.20 pounds ∙Digital Inspection Scope Connection∙Illumination Control- LED in the Control Module∙Power Cycle∙USB Camera Cable∙Easily change from small and large diameter scopes.Light Settings:There are four light settings operated by one button.Blinking Light (Indicates transmitting video data):∙Splash proof (IPX5 Rating)∙No external power needed.Flexible Inspection Scope Software Requirements:∙Compatible with Windows 10 Operating systems.∙USB flash drive includes software.Unpacking Flexible Inspection Scope:Carefully inspect for shipping damage. If there is any damage contact the shipping carrier and Heatlhmarkcustomer service 800-521-6224 immediately.USB Control Module: (Fig. 1).1.Digital Inspection Scope Connection 2.Illumination Control 3.Power Cycle B (Type C) on the right side of the boxFigure 1Flexible Inspection Scope™: (Fig. 2).∙CT-101 1.90 mm O.D. and 110 cm length ∙CT-102 1.06 mm O.D. and 110 cm lengthLarge1.90 mmSmall 1.06 mmFigure 2Flexible Inspection Scope™ Features3214Light/Illumination Settings: (Fig. 3).∙Five (5) light settingso Light on control indicats setting levelo Fifth setting is OFF∙Press light button to advance to next setting.∙Fifth setting turns the light OFF.Figure 3Power Cycle ButtonPress button to RESET camera (Fig. 4).Figure 41.Flexible Inspection Scope™ Plug (Fig. 5).Contains camera video connection as well as LED Light for illumination.1Figure 52.Flexible Working Length (Fig. 6).The portion of the Flexible Inspection Scope™ that is inserted into an item during visual inspection.The measuring scale markings on the Flexible Working Length are in centimeters (accuracy = ± 0.5 cm)2Figure 63.Distal Camera (Fig. 7).Distal portion of Flexible Inspection Scope™ that contains the camera lens3Figure 7SOFTWARE INSTALLATION:Note: This section is done only once when connecting the scope to the computer for the first time.∙System Requirements: MS Windows 10∙Install the Flexible Inspection Scope™ Software from the USB flash drive on a computer.Note: If you have any IT policies that may block this installation, please contact your IT team to give access to Healthmark scope viewer to install.1. Insert the USB Flash drive into your computer, and double click on the Healthmark Scope Viewer installer package to begin installation.2. The “Welcome to the Healthmark Scope Viewer Setup Wizard” screen pops up. Click on Next.3. Select the first tab Typical or setup type of your choice, click Next.4. Click Install and wait for installation to complete.5. Click Finish.STARTING SOFTWARE & CONNECTING SCOPE TO PC:(Fig 8).1.Open the Windows PC viewer software.2.Connect the Control Module to PC using USB Cable.3.Plug the Flexible Inspection Scope into the Control Module.4.In the viewer software, click Settings and Select USB Video Device, click on the desiredresolution, select the preferred Video Output Format, and then Click OK.5.Press the Power Cycle Button.Figure 86.Now you can start using the scope.Verifing OperationFollowing the steps listed below will ensure the proper use and performance of the Flexible Inspection Scope™. The Flexile Inspection Scope™ can be checked for normal operation by connecting it as described in the Startup section of this IFU.Normal operation includes:∙An image appearing on your computer monitor or HDMI Monitor.∙ A blinking light on Control Module near the Power Cycle button that indicates the image feed is transmitting.∙White light emitting from the distal end of the Digital Inspection Scope.∙An LED light on the control module top panel that indicates the light intensity of the device. Using SoftwareHealthmark Scope Viewer Software (Fig. 9).1.Capture button: Captures a Reference Image and saves it to the Reference Image folder.2.Main Image Window: Displays the image from the camera.3.Reference Image Window: Displays a reference image.4.Clear Button: Removes the image from the Reference image window.5.Open Reference Image button: Allows selection of a reference image from the Reference Imagefolder.6.Settings Button: Click to select the video camera and resolution settings.7.File Location Button: Click to change location where captured images are being saved.8.File Location Window: Shows the file path where captured images are being saved currently.9.Capture Image Button: Captures images and adds them to the File Location selected by the user(as shown in the File Location Window).10.Capture Video button: Click to record video. Click again to stop recording video.11.File Prefix: Type in text that you would like included in the file name of Captured Images.Figure 9Selecting Video Device or CameraFollow the directions below to select the video device or camera used to capture images using the Flexible Inspection Scope™ Viewer Software. (Fig. 10).1.Click Settings button in the lower left of the Scope Viewer software to display a list of videodevices or cameras being detected by your computer2.Select a device for capturing images using the Scope Viewera.The example below shows a webcam and USB Video Device in the Settings box. Select theUSB Video Device for the Flexible Inspection Scope™.b.You can also select your preferred Video Output Format from the dropdown box3.Click OK to view the selected Video Device.231Figure 10Capturing Still PicturesFollow the instructions for capturing still pictures from the Main Image Window.Select the Capture Image button. (Fig. 11).Figure 11Note: When an image is captured, “Image Captured” in red text will flash on the lower portion of the screen and a new file will appear in the Files Location.Capturing Video ImagesFollow the instructions below for capturing video from the Main Image Window.1.Select the Capture Video Button (Fig. 12).Figure 122.When the video is recording “Recording…” in red text will appear toward the bottom of thesoftware window.3.To stop recording, click Stop Capture. (Fig. 13).Figure 13Setting File PrefixFollowing the steps below allows you to create a file prefix that will appear after the underscore of image file names save to the File Location specified by the user.1.Click in the field next to File Prefix.2.Enter the characters that you would like to be included in the file name. (Fig 14).Figure 14Setting Location for Saved FilesFollowing the steps below allows you to set the file location of saved images using the Scope Viewer software.1.Click the File Location button.2.Select the file location you want to save captured images. (Fig 15).Figure 15Displaying Reference ImageThere are two ways to display a still image in the Reference Image Window on the Scope Viewer software.1.To display an image currently being displayed in the Main Image Window, click the Capture button. Note: The images will be saved in a file folder titled Reference Images in the designated File Location that the user specified in the File Location field. (Fig. 16).Figure 162.To display a saved image in the Reference Image Window from your File Location:a.Click the Open Reference Image button (Fig. 16 above).b.Select the file you want to display (Fig. 17 below).c.Click the OK Button, to display the image in the Reference Image Window. (Fig. 17).Figure 17Switching to a Different Flexible Inspection Scope™ on the Control Module:1.Press the Power button on the Control Module once.2.Disconnect the current Flexible Inspection Scope from the Control Module.3.Repeat the steps in the “STARTING SOFTWARE & CONNECTING SCOPE TO PC” procedure.Inserting Scope in ItemFigure 1Rotating Device to Avoid ObstacleFigure 2 Performing InspectionWipe down the Flexible Inspection Scope™ with a compatible wipe. Follow the manufacturer’s (Mfr.’s)Instructions for Use (IFU) for appropriate wipe usage. Click here to see the Chemical Compatibility Chart(PDF) for approved cleaning.The Flexible Inspection Scope™ is made of the same material as other common endoscopes. Any wipe,solution, or low temperature (≤ 60 °C [140 °F]) method intended for the reprocessing of endoscopes is likelycompatible with the Generation II Flexible Inspection Scope™ Catheters if used according to the productlabeling.Solutions Containing (Flexible Inspection Scope Only)Alcohol Ethoxylates Neutral or Near-Neutral pH DetergentsEnzymatic Cleaning Solutions Enzymatic DetergentsSodium Borated, Decahydrate Tetrapotassium PyrophosphateFlexible Inspection Scope™ has a fluid ingress protection rating of IPX7 (Waterproof) and can withstandimmersion in fluid up to one (1)-meter in depth for up to 30 minutes.Control Module USB has a fluid ingress protection rating of IPX5 (Water resistant) and can withstand asustained, low pressure water jet spray for up to three minutes.For Thorough Cleaning: CablesFollow the cleaning agent Mfr.’s IFU.1.Unplug and disconnect all components from the Control box prior to cleaning.2.Do not submerge or soak the cable for disinfection (cable is not waterproof).3.Wipe thoroughly with non-linting wipe moistened with facility approved neutral detergent. Use theappropriate brushes with detergent solution to remove any residues from areas that cannot bereached with the wipes.For Thorough Cleaning: Control Module1.Unplug and disconnect all components from the Control box prior to cleaning.2.Do not submerge or soak the cable for disinfection (Control Box is not waterproof).3.Wipe thoroughly with non-linting wipe moistened with facility approved neutral detergent. Use theappropriate brushes with detergent solution to remove any residues from areas that cannot bereached with the wipes.Note: Do NOT soak. Control Module and cables are not waterproof and should not be immersed.N/ACleaning –AutomatedDisinfection Control Module and CablesThese may be cleaned with alcohol based disinfectant wipes.Compatible agents (wipes and solutions) for disinfecting Flexible Inspection Scope™ and ControlModule:∙Hydrogen peroxide∙Isopropyl alcohol (IPA)∙Sodium hypochlorite (Bleach)∙Ortho-phenylphenol∙Quaternary ammonium.High-Level Disinfection (Flexible Inspection Scope™ Only)∙Select only disinfecting solutions listed in the compatible disinfecting methods.∙Follow all recommendations regarding health-hazards, dispensing, measuring, and storage from the Mfr. of cleaning and disinfecting agents.∙Soak the Flexible Inspection Scope™ in selected disinfecting solution per Mfr.’s IFU.∙Rinse the Flexible Inspection Scope™ with critical (sterile) water, again, following the disinfecting solutions Mfr.’s instructions.Reprocessing Chemical Compatibility Chart (PDF): Click here.。
HR-NR5000-2U系列NVR 说明书

The HR-NR5000-2U series NVRs are designed for the dynamic needs ofthe emergent digital video surveillance market. With high image resolution,seamlessly integrated mass storage, and alarm recording, The NVRdeliver flexible and powerful performance to security professionals fordistributed enterprise architectures and centralized managementapplications.The NVR are a complete network based video recording solution whichsupports various video compression formats of IP cameras (H.264,MPEG-4, and MJPEG), and image resolutions, from CIF/ D1, VGA, tomultiple megapixels. Integrating with megapixel IP cameras, MatriVideo™provides a breakthrough platform to view high resolution video from yoursurveillance system. Simply plug into the network infrastructure and theNVR can display the video image from any IP camera source through theEthernet. The IP cameras can be installed without cumbersome cabling,meaning that setting up a new IP-based security system has never beeneasier or more cost effective.Based on the embedded Linux OS, The NVR_On_Chip technology,combined with dual power supplies and RAID-5 and RAID-6 enhancement,provides customers a stable and secure system. The embedded Linux OSincreases overall system availability by reducing system downtime causedby power supply and hard drive failure. It has the capability to keep acomplete six month audit trail database of user activities. MatriVideo™NVRs allow different recording settings - continuous, motion detected,event triggered, and scheduled recording. This increases the data storageutilization giving more space to store video and saving money. The NVR provide the most intelligent and comprehensive video search tools. Users can retrieve the desired video images with a few simple clicks. Its graphical display illustrates the recorded video history, yet with quick indicators for alarm instances (video loss, motion detection, real-time video analytics, sensor or digital inputs, even POS and Access Control System events), and manual recording instances (special events triggered by security personnel onsite).a high performance enterprise-class network based solution for distributed architecturedata protection (optional)ID-1304NR52UFunctionOperating systemImage controlDual watchdogVideo inputAudio inputSupported resolutionSupported formatMax frame rate**Recording modesPre/post alarm recordingInternal storageInternal RAID5 and RAID6External storageSearching methodMonitoring environmentSpeaker outAudio line inSerial portKeyboardEthernetUSBVGA outputI/O controlsOptional remote I/O ModuleHardware accessoriesVideo servers and IP-camerasACSElectric power sourceDual power suppliesPower outputOperating temperatureHumidityDimension (mm)Weight (kg)ModelNetwork video recorder Embedded Linux Contrast / Brightness / Saturation / Hue Yes 16 / 32 / 48 / 64 channels 16 / 32 / 48 / 64 channels All resolutions supported MJPEG / MPEG4 / H.26430 fps (NTSC) / 25 fps (PAL)Continuous / Scheduled / Motion detected / Intelligent video detected / Event triggered / Manual / API 1 ~ 60 seconds Up to 8 swappable HDDs Optional Archive Server / IP SAN / SAS Date / Time / Camera / Alarm list Command Center(Lite/Dual), nCCTV 112 x RS-232PS/2 and USB 2 x RJ-45, 10/100/1000Mbps 6 x USB2.015 pin female D-SUB Max. 128 Inputs / 64 Outputs using Remote I/O Modules (optional)ID-IO2000-1600 (16 DI), ID-IO2000-0008 (8 DO), ID-IO2000-0808 (8 DI / 8DO) C232-485i (RS232 / 485 converter)1 x Power cable 3S, ACTi, Appro, Arecont Vision, Arlotto, AXIS, Basler, Brickcom, CNB Technology, Hikvision, Hi-Sharp, Hitron, Hunt, Instek Digital,ITX, IQinVision, MatriCam, Messoa, Mobotix , Pixord, Pelco, Probe, Samsung, Secubest, SANYO, SONY , Vivotek Cardax, CEM, Tyco AC 100 ~ 240V Optional 400W 0 ~ 40°C Max. 90%, non-condensing 575(L) x 485(W) x 95(H) mm (w/o box)14.1 Kg (w/o box)HR-NR5416-2U / HR-NR5432-2U / HR-NR5448-2U / HR-NR5464-2U SpecificationsFront ViewRear View Power socket Exhaust fan a) The actual video display performance may vary according to type of camera(s) and lighting condition.b) Product specifications and availability are subject to change without notice.COM VGA Speaker out / audio in USB DVI PS/2Ethernet。
【国家自然科学基金】_模糊对象_基金支持热词逐年推荐_【万方软件创新助手】_20140802

边坡稳定 辨识 轴承 车辆动力学 超精密定位 超平面 资源优化利用 调速系统 语义相关 语义 评判矩阵 评价体系 评价 视频对象提取 虚拟仪器 荷电状态 药液异物 荒漠草原 船舶运动 舵减横摇 自适应逆控制 自适应模糊控制 自适应 自动公路系统 自主创新能力 聚类算法 聚类有效性指标 聚类数 聚合酶反应 联系度 网络诱导时滞 网络控制 网络协议 组合自适应模糊控制器 线性矩阵不等式 线性化 系统辨识 系统仿真 粗集 粗糙模糊集 类中心 簇的调整 算法 端电压 空间聚类 离散t-s模糊模型 磁悬浮主轴 矩阵蕴涵运算 矩阵 知识系统 知识管理 真值度量 相异度量 相对约简
海底地形 测评模型 活性污泥过程 洪水灾害管理 汽车 汛限水位 汛期分期 永磁直线同步电动机 永磁同步电机 水稳性团聚体 毛竹林 比例因子 欠驱动 模糊预测控制 模糊集合分析 模糊集值信息系统 模糊隶属度 模糊逻辑系统 模糊逻辑单元 模糊边界 模糊规则 模糊自适应pid 模糊聚类分析 模糊聚类 模糊综合评判 模糊约束 模糊空间对象 模糊秀体溢 模糊神经控制 模糊神经元网络 模糊知识表示 模糊树模型 模糊方差 模糊数学方法 模糊推理建模 模糊控制策略 模糊拓扑关系 模糊开关控制器 模糊建模 模糊土地覆盖 模糊四元联系数 模糊分类 模糊分析 模糊关联 模糊传感器 模糊pi控制器 模糊pid控制 模糊pid-神经元控制 模糊c-means算法 模糊-pid控制 模态逻辑 模块化设计 概念 案例推理
推荐指数 6 5 4 4 4 3 3 3 2 2 2 2 2 2 2 2 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2009年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52
极限交换机VDX6740和VDX6740T产品介绍说明书
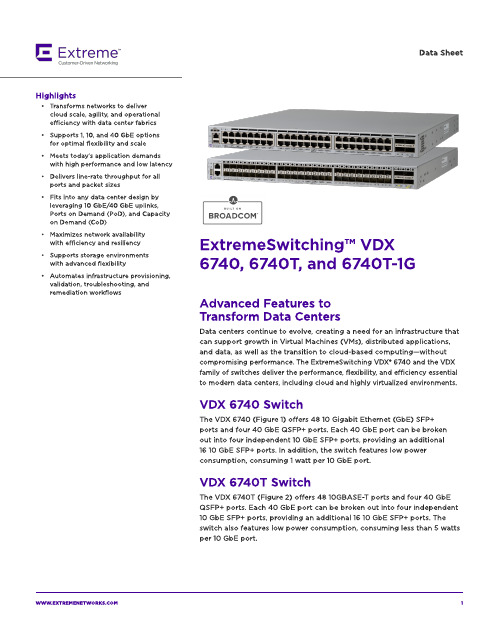
The VDX 674 0 T-1G ( Fig ure 3) offers 4 8 10 0 0 BA SE-T p ort s and t w o 4 0 Gb E QSFP+ p ort s. Each 4 0 Gb E p ort can b e b roken out int o four ind ep end ent 10 Gb E SFP+ p ort s, p rovid ing an ad d it ional eig ht 10 Gb E SFP+ p ort s for up link. A ll 4 8 10 0 0 BA SE-T p ort s can b e up g rad ed t o 4 8 10 GBA SE-T p ort s via t he Cap acit y on Dem and (CoD) soft w are license. Tw o 4 0 Gb E p ort s are enab led as p art of t he b ase license. The ad d it ional t w o 4 0 Gb E p ort s can b e up g rad ed via t he Port s on Dem and ( PoD) soft w are license.
- Meet s t od ay?s ap p licat ion d em and s w it h high perform ance and low latency
- Delivers line-rate t hroughput for all p ort s and p acket sizes
Dat a Sheet
欧博特纽维尔 IP7000系列产品数据手册说明书

From Product Management Telephone NurembergST-VS ST-VS/MKP1 +49 911 93456 0 12-Jan-2015 Release LetterProduct: DIVAR IP 7000 FamilyVersion: Maintenance Release DOM image v1.0.5This letter contains latest information about the above mentioned Bosch DIVAR IP 7000 Family.1. GeneralDIVAR IP 7000 is an affordable, simple and reliable all-in-one recording, viewing and management solution for network surveillance systems of up to 128 channels (with 32 channels pre-licensed).Running the full Bosch VMS (Video Management System) solution and powered by Bosch Video Recording Manager software, DIVAR IP 7000 is an intelligent IP storage device that eliminates the need for separate NVR (Network Video Recorder) server and storage hardware.It combines advanced recording management and state-of-the-art iSCSI storage into a single cost-effective, plug and play IP recording appliance for IT-minded customers which are seeking for a state-of-the-art “second generation” NVR recording solution.2. Restrictions; Known Issues•Graphics Port: The DVI port must be used for configuration. Do not use the VGA port for configuration.•Initial installation: During initial boot and installation the system must be connected to the network.Please note: All systems come with the same default IP address.•Transcoder: Maximum transcoder source stream resolution is 1920x1080p30•Mobile Video Service: the local MVS needs to be added to the system with the private IP address (not 127.0.0.1), if it shall serve as a fall-back transcoder for Operator Client access.•BVC needs to be upgraded to version 1.6.2 or higher, if it shall serve as replay client for DIVAR IP 7000 appliances with BVMS 5.0.5•VideoSDK needs to be upgraded to 5.81 MR1 or higher, if it shall serve as integration tool for DIVAR IP 3000 appliances with BVMS 5.0.5•3rd party device support restrictions are listed in the Bosch VMS release notes:o /documents/Release_Notes_5.0.5__Release_Note_enUS _16781064459.pdf3. New subcomponent software versions•Bosch VMS 5.0.5.1010 (alternative installation option: BVMS 4.5.9.359)From Product Management Telephone NurembergST-VS ST-VS/MKP1 +49 911 93456 0 12-Jan-2015•Video Recording Manager 3.00.0074•Video Streaming Gateway 5.91.0020•USB-Transcoder Service 5.60.00784. New FeaturesSystem Setup•Initial Setup procedure prompts a selection of two software installation options:o BVMS 5.0.5: recommended for most userso BVMS 4.5.9: recommended if system shall be integrated into existing BVMS 4.5.9 based infrastructureConfiguration Wizard (BVMS 5.0.5)•Remote access: DNS information can be entered in the Basic step. The port rules for router configuration can be retrieved from the detailed report in the last wizard step.•Network address of video devices to be added can be changed, if they are located in a different IP range.•Recording profiles and retention time settings can be changed individually per device or for a selection of devices.Management Server (BVMS 5.0.5)•Additional data: option to record text data together with video streamVideo Streaming Gateway (BVMS 5.0.5)•VSG supports alarm recording triggered by BVMS events5. Applied Changes / Bug FixesBVMS 5.0.5•Tested software/firmware versions, supported devices, bug fixes and change are listed in the Bosch VMS release notes:/documents/Release_Notes_5.0.5__Release_Note_enUS_16781 064459.pdfVideo Recording Manager•Bug fixes and change are listed in the VRM release notes:/downloads/nue-mkp/VRM/3_00/Bosch_Releaseletter_VRM3_00_0073.pdfMobile Video Service•Fixed: correct MVS entry shown in port mapping table for remote access•Fixed: local MVS priority settings prevent system overload•Changed: MVS web page can now be used: https://<system-IP>/mvsFrom Product Management Telephone NurembergST-VS ST-VS/MKP1 +49 911 93456 0 12-Jan-20156. Installation Notes•An upgrade from DOM Image v1.0.1 cannot be performed manually. DOM image v1.0.2 and later require a newer version of the system BIOS•All models are based on Windows Server 2008 R2, 64-bit, Standard Edition7. History7.1 DIVAR IP 7000 DOM image version 1.0.4Restrictions; Known Issues•Graphics Port: The DVI port must be used for configuration. Do not use the VGA port for configuration.•Initial installation: During initial boot and installation the system must be connected to the network.Please note: All systems come with the same default IP address.•Transcoder: Maximum transcoder source stream resolution is 1920x1080p30•ONVIF Support Restrictionso no support for event-based recordingo Audio on some 3rd Party cameras not fully supported which may result in non-availability of audio streamso TCP not supported for ONVIF cameras but with UDP protocol onlyo Motion JPEG is not supportedo VCA is always recorded for Bosch deviceso VCA is not available for ONVIF camerasFrom Product Management Telephone NurembergST-VS ST-VS/MKP1 +49 911 93456 0 12-Jan-2015New subcomponent software versions•BVMS 4.5.9.359•VRM 3.00.0057New FeaturesImage•Added support for 3TB hard drives (DIVAR IP 7000 2U)•Added support for party populated hard drive layouts; 3 to 8 hard drives as part of a RAID 5 configuration (DIVAR IP 7000 2U)Configuration Client and Configuration Wizard•To avoid security issues, a global default password must be set for all devices and all authorization levels (service, live, user) that are not password protected. You can disable this enforced password protection for BVIP devices.•VIP X16 XF E has been moved to Device Family 2 for support of 2nd stream for recording.Deviating from the behaviour of the other devices belonging to Device Family 2, VIP X16 XF Emust use the same stream for all recordings. Although the user can configure stream 1 forcontinuous recording and stream 2 for alarm recording, the second setting will not take effect. After an Bosch VMS upgrade, perform the update of the device family manually.To update the device family:Right-click the device and click Edit Encoder.Click OK.Applied Changes / Bug FixesImage•Fixed: DVD burner permission problem•Fixed: 30days password expiration problem (last fix didn’t apply in every case)•Changed: Client software and documentation updated on the local network share Operator Client•Fixed: Click on find video by event results jumped to wrong playback time.•Fixed: Live video images from NTSC cameras on DVR 670 were squeezed.•Fixed: Sometimes OpClient could crash on loading favorites.•Fixed: ONVIF domes could not be controlled.•Fixed: Under rare circumstances OpClient could crash on logon of dual authorization group.•Fixed: Video viewing via NAT/port mapping routes did not work on Windows XP.•Fixed: Manual focus/iris in automatic mode.•Tested software/firmware versions and supported devices (see BVMS 4.5.9 release notes for details http://144.76.6.227/downloads/support-cctv/DIVAR_IP_3000/BVMS_VERSION_4_5_9_ReleaseNotes.pdf)From Product Management Telephone NurembergST-VS ST-VS/MKP1 +49 911 93456 0 12-Jan-2015 Configuration Client•Fixed: OPC Server Connection for BIS license option was not available.Configuration Collector•Fixed: Config Collector freezed while zipping collected files.VRM•Fixed: Discovery is more stable•Fixed: Reliability of disconnecting transcoders improved•Fixed: Exporting Log-Files large than 100MB•Changed: iSCSI-password is also set on USB-Transcoder7.1 DIVAR IP 7000 DOM image version 1.0.2Restrictions; Known Issues•Graphics Port: The DVI port must be used for configuration. Do not use the VGA port for configuration.•Initial installation: During initial boot and installation the system must be connected to the network.Please note: All systems come with the same default IP address.•ONVIF Support Restrictionso no support for event-based recordingo Audio on some 3rd Party cameras not fully supported which may result in non-availability of audio streamso TCP not supported for ONVIF cameras but with UDP protocol onlyo Motion JPEG is not supportedo VCA is always recorded for Bosch deviceso VCA is not available for ONVIF camerasNew subcomponent software versions•BVMS 4.5.8.151•VSG 5.60.0073• Transcoder 5.60.0073•.NET Framework 4.5New Features•Unlisted Bosch BVIP video devices can be added as generic devices (see BVMS 4.5.5 release notes for details).•Server Lookup improvements (see BVMS 4.5.8 release notes for details).From Product Management Telephone NurembergST-VS ST-VS/MKP1 +49 911 93456 0 12-Jan-2015 •Minor changes in the user and workstation settings (see BVMS 4.5.8 release notes for details).•Client software and documentation can be downloaded from local network share.Applied Changes / Bug Fixes•Fixed: 30days password expiration problem•Fixed: Windows activation problem•Fixed: iSCSI LUN preparation problem•Fixed: firewall rule exceptions•Wizard prompts system reboot option when Network settings are changed•Minor fixes in new subcomponent software versions (BVMS, VRM, VSG, Transcoder)•Minor improvements in the initial installation procedure•Tested software/firmware versions and supported devices (see BVMS 4.5.8 release notes for details → http://144.76.6.227/downloads/support-cctv/DIVAR_IP_3000/BVMS_VERSION_4_5_8_ReleaseNotes_v1.pdf).•Bosch VMS default screen now shows text labels below the icons.•The default network settings now match the default network settings of other Bosch video devices o IP Address: 192.168.0.200o Subnet mask: 255.255.255.0Installation Notes•An upgrade from DOM Image v1.0.1 cannot be performed manually. DOM image v1.0.2 requires a newer version of the system BIOS•All models are based on Windows Server 2008 R2, 64-bit, Standard Edition7.2 DIVAR IP 7000 DOM image version 1.0.1Restrictions; Known Issues•Graphics Port: The DVI port must be used for configuration. Do not use the VGA port for configuration.•Password of limited operational Windows user expires after 30 days:o The password of limited user must be set manually to “never expires” on DIVAR IP 7000 by logging on to the DIVAR IP via remote desktop with user administrator user “BVRAdmin”.In the “Server Manager” the password can be changed to “Password never expires”(Configuration → Local Users and Groups → User (→ user limited)).o For details s. Bosch Security Knowledge Basehttps:///al/12/2/article.aspx?aid=7400&tab=search&bt=4&r= •Default IP Address: The system comes with the following network settingso IP Address: 192.168.178.200o Subnet mask: 255.255.0.0From Product Management Telephone NurembergST-VS ST-VS/MKP1 +49 911 93456 0 12-Jan-2015 •Initial installation: During initial boot and installation the system must be connected to the network.Please note: All systems come with the same default IP address.•Network Settings Change: The DIVAR IP needs to be restarted, if network settings are changed in the Wizard. This applies for the initial setup as well as for changes during standard operation.•Adding Storage: If the wizard stops at Step 8 “Add storage”, because the LUNs aren’t formatted, the LUNs have to be formatted using the Bosch VMS Config Client.•ONVIF Support Restrictionso no support for event-based recordingo Audio on some 3rd Party cameras not fully supported which may result in non-availability of audio streamso TCP not supported for ONVIF cameras but with UDP protocol onlyo Motion JPEG is not supportedo VCA is always recorded for Bosch deviceso VCA is not available for ONVIF camerasNew FeaturesThe DIVAR IP 7000 Family is an all-in-one management solution that comes with BVMS/VRM including Video Streaming Gateway pre-installed and with 32 channels pre-licensed. The system will come with one built-in Transcoder channel.Applied Changes / Bug Fixesn/a。
数据库系统概念(database system concepts)英文第六版 第一章
Databa se Sy stem Concept s - 6th Edition
1 .3
©Silber schatz , Korth and S u dar
n Relational model (Chapter 2) n Example of tabular data in the relational model Columns
_____ Rows
Databa se Sy stem Concept s - 6th Edition
1 .10
©Silber schatz , Korth and S u dar
n Physical Data Independence – the ability to modify the physical schema without changing the logical schema l Applications depend on the logical schema l In general, the interfaces between the various levels and components should be well defined so that changes in some parts do not seriously influence others.
1 .5
©Silber schatz , Korth and S u dar
n Phys ical level : describes how a record (e.g., customer) is stored. n Logical level : describes data stored in database, and the relationships among the data. type instructor = record ID : string;
商品说明书:ATLAS SOUND AT 系列商业抑制器

©2011 A t l a s S o u n d L .P . A l l r i g h t s r e s e r v e d . A t l a s S o u n d a n d S t r a t e g y S e r i e s a r e t r a d e m a r k s o f A t l a s S o u n d L .P . A l l o t h e r t r a d e m a r k s a r e t h e p r o p e r t y o f t h e i r r e s p e c t i v e o w n e r s . A T S 001063 R e v D 10/13Commercial AttenuatorsAT Series, E408 SeriesFeatures• M odels Feature a Range of Attenuation Steps (1.5dB or 3dB Steps) as Well as Continuous to Meet Application and Budget Requirements • W all Plates are Stainless Steel with Stamped and Filled or Screen Printed Dial Scale, and a Skirted Black Knob (White and Ivory Plastic Plates with Matching Skirted Knobs Also Available in Decora Style-D Series Only)• P opular Rack Mount Attenuator Versions are Available on the AT and E408 Series for Mounting on to Blank Panels in Equipment Cabinets• All AT Models Mount into Most 1-Gang E.O. Boxes. (23⁄4" Deep)• AT and E408 Series are UL ListedGenenal DescriptionAT Series Industry Standard Auto Transformer. High-quality auto transformer series provides the advantages of excellent frequencyresponse, low insertion loss and reliable performance for volume control application in 25V/70.7V systems. Attenuation is accomplished in ten make before break steps plus positive Off position. (No stop between maximum and Off position to prevent switch damage). Contacts are silver plated for noise-free operation. Features a removable terminal block. Includes stainless steel plate, with stamped and filled or screen printed dial scale and a skirted black knob. (White and ivory plastic plates with matching skirted knobs also available in Decora style-see AT model description chart).E408 Auto Transformer with Precision Level Control. Specially designed for attenuation in masking and sound reinforcement systems where fine tuning of level control is required. Employs a ten-position, non-shorting rotary switch without stop. Attenuation rate is 1.5dB per step. (All other specifications are the same as the AT Series including the UL listing).PA Series Priority Paging Option. Priority paging feature by-passes the effect of the attenuator to provide program level selection of individual emergency and paging signals at the amplifier. Option isavailable on all AT attenuators. The SPDT relay is operated with 24VDC at 10mA. Includes protective relay cover to ensure lasting trouble-free performance. Terminations to the relay and attenuator are made via a removable terminal block. (All other specifications except for dimensions are the same as selected AT models).RM Series Rack Mount Option. For attenuation convenience of rack-mounted equipment in cabinets and consoles, the AT, E408Series attenuators are available without mounting plate for rack panel installation. Attractive matte black polycarbonate dial scale overlay with adhesive backing replaces the mounting plate. Includes skirted black knob. Overlay size is 29 square (51mm). (To order, simply add RM after the selected attenuator model number. Example: AT10-RM or AT10-PARM.) (Dial scale overlays to retrofit existing installations are available, see Model HX23.)Replacement Knobs©2011 A t l a s S o u n d L .P . A l l r i g h t s r e s e r v e d . A t l a s S o u n d a n d S t r a t e g y S e r i e s a r e t r a d e m a r k s o f A t l a s S o u n d L .P . A l l o t h e r t r a d e m a r k s a r e t h e p r o p e r t y o f t h e i r r e s p e c t i v e o w n e r s . A T S 001063 R e v D 10/13Specfications AT10-(PA)Power Rating * 10 WattsUL ListingAttenuation Per Step 3dB Total Attenuation33dB**Insertion Loss .4dB Plate Size 1 gang Resistance NoneAT35-(PA)Power Rating *35 WattsUL ListingAttenuation Per Step 3dB Total Attenuation27dBInsertion Loss .6dB Plate Size 1 gang Resistance NoneAT100-(PA)Power Rating *100 WattsUL ListingAttenuation Per Step 3dB Total Attenuation27dBInsertion Loss .6dB Plate Size 1 gang Resistance NoneE408-100Power Rating *100 WattsUL ListingAttenuation Per Step 1.5dB Total Attenuation15dBInsertion Loss .6dB Plate Size 1 gang Resistance None* Continuous** These units have two steps of 6dB before off position.Note: Attenuation curve is steeper for a 25-volt lineArchitect and Engineer SpecificationsAT Series Attenuator(s) shall be Atlas Sound AT Series Model____________ auto transformer or approved equal. The power rating shall be __________ and attenuation range shall be _________dB. Attenuation per step for AT-____ shall be 8 steps of 3dB and 6dB each for the last two positions. Attenuator shall be a step type control with a positive off position. There shall be no stop between the maximum and off positions (AT Series only). Switch shall have silver plated contacts to eliminate noise and contact loss. All terminations must be made via a removable terminal block. Unit(s) shall be supplied with one of the following single gang face plates to be noted by model number suffix: Standard stain l ess steel faceplate (with dial scale to indicate attenuator position), Decora style plastic face plate-Ivory color, Decora style plastic face plate-White color. All models are designed to mount in a standard E.O. box.E408 UL Listed attenuator shall be Atlas Sound Model E408-100 auto transformer or approved equal. The power rating shall be 100W. The at t enu a tion per step shall be 1.5dB. Unit shall be a step type control with a positive off position. There shall be no stop between the maximum and off positions. Switch shall have silver plated contacts to elimi n ate noise and contact loss. The attenuator shall be mounted to a standard gang stainless steel wall plate which mounts to a standard E.O. box.RM Option Attenuator shall be Atlas Sound Model ____________ [(AT, E408 (-RM)] or ap p roved equal. Face plate shall be replaced by an adhesive matte black poly c ar b on a te dial scale escutcheon for attachment to a rack mount panel. Escutcheon size shall be 2" SQ.PA Option Specified AT Series attenuators include a priority relay. Relay shall be an SPDT, 24 VDC type securely mounted to the attenuator assembly wired at the factory. Relay shall include a protective cover.AT10 (dc) (-PA) (-RM)AT35 (dc) (-PA) (-RM)Faceplate Options:d = D - Decora Style FaceplateIvory and White inserts, trim ring and knobs icluded.If there is not the above 1 letter suffix, the attenuator is shipped with the standard stainless steel faceplate or is the RM version without a faceplate.©2011 A t l a s S o u n d L .P . A l l r i g h t s r e s e r v e d . A t l a s S o u n d a n d S t r a t e g y S e r i e s a r e t r a d e m a r k s o f A t l a s S o u n d L .P . A l l o t h e r t r a d e m a r k s a r e t h e p r o p e r t y o f t h e i r r e s p e c t i v e o w n e r s . A T S 001063 R e v D 10/13AT SeriesDimensional Specifications Plate Mounted AttenuatorsMODEL A B C D EAT10 41⁄2" 21⁄8" 23⁄4" 23⁄4" 13⁄4"AT10-PA 41⁄2" 21⁄8" 23⁄4" 23⁄4" 13⁄4"AT3541⁄2"21⁄8" 23⁄4" 23⁄4" 13⁄4"AT35-PA 41⁄2" 21⁄8" 23⁄4" 23⁄4" 13⁄4"AT10041⁄2"21⁄2" 23⁄4" 23⁄4" 13⁄4"AT100-PA 41⁄2" 21⁄2" 23⁄4" 23⁄4" 13⁄4"E408-100 41⁄2"25⁄8"23⁄4"23⁄4"13⁄4"©2011 A t l a s S o u n d L .P . A l l r i g h t s r e s e r v e d . A t l a s S o u n d a n d S t r a t e g y S e r i e s a r e t r a d e m a r k s o f A t l a s S o u n d L .P . A l l o t h e r t r a d e m a r k s a r e t h e p r o p e r t y o f t h e i r r e s p e c t i v e o w n e r s . A T S 001063 R e v D 10/13WIRING - AT SeriesEach terminal will hold up to 2-16AWG stranded wire.For larger wires or home run situations, a small length of wire and a wire nut are recommended.Attach wire according to label on terminal black as shown below (Non-PA Models will not have the "VDC+" and "VDC-" terminals).* Install the unit with the terminal block on top. This will ensure that theoff position is on the bottom.©2011 A t l a s S o u n d L .P . A l l r i g h t s r e s e r v e d . A t l a s S o u n d a n d S t r a t e g y S e r i e s a r e t r a d e m a r k s o f A t l a s S o u n d L .P . A l l o t h e r t r a d e m a r k s a r e t h e p r o p e r t y o f t h e i r r e s p e c t i v e o w n e r s . A T S 001063 R e v D 10/13Wiring - (-Pa) Priority AttenuatorsRelay SpecificationsCOIL VOLTAGE: 24VDC COIL CURRENT: 10MACONTACTS: S PDT-2AMP RatingRelay Has a Protective CoverPower Switching Req. For - Pa Attenuators。
卡林技术公司产品说明书

UL Recognized UL Standard 1077Component Recognition Program as Protectors,Supplementary (Guide QVNU2,File E75596)UL Standard 508Switches,Industrial Control (Guide NRNT2,File E148683)CSA CertifiedComponent Supplementary Protector under Class 3215 30,FIle 047848 0 000CSA Standard C22.2 No. 235VDE CertifiedEN60934,VDE 0642 under File No.10537Agency CertificationsNotes for T able A:1DC and 1Ø 277 Volt ratings are 1 or 2 poles breaking. 3Ø Ratings are 3 poles breaking.2 Requires branch circuit backup with a UL LISTED Type K5 or RK5 fuse rated 15A minimum and no more than 4 times full load amps not to exceed 150A for 250 Volt rating and 125A for 277and 480 Volt ratings.3 UL Recognition and CSA Certification at 480 Volts refers to 3 and 4 pole versions, used only in a 3Ø wye connected circuit or 2 pole versions connected with 2 poles breaking 1Ø and backedup with series fusing per note 2.Table A:Lists UL Recognized and CSA and VDE Certified configurations and performance capabilities as a Component Supplementary Protector.ElectricalCURRENT RA TINGCIRCUITMAX FULL LOAD WITH WITHOUT (Inc) WITH (Icn) WITHOUTCONFIGURA TIONRA TINGFREQUENCYPHASEAMPSBACKUP FUSEBACKUP FUSEBACKUP FUSEBACKUP FUSE65DC ---0.02 - 50 ---500050001500125/25050/60 1 and 30.02 - 50 ---3000 --- ---25050/60 1 and 30.02 - 505000 ---5000150027750/6010.02 - 505000 --- --- ---480 Y 50/60 1 and 30.02 - 305000---------65DC ---0.02 - 5025050/60 1 and 30.02 - 5027750/6010.02 - 50480 Y50/6030.02 - 30480 Y 50/6010.02 - 30SWITCH ONL Y UL / CSAVDED-SERIES TABLE A: COMPONENT SUPPLEMENTARY PROTECTORVOLT AGEINTERRUPTING CAPACITY (AMPS)SERIESDesigned for snap-on-back panel rail mounting on either a 35mm x 7.5mm, or a 35mm x 15mm Symmetrical Din Rail,allowing rapid and simple mounting and removal of the breaker.It features recessed, wire-ready, touch-proof, shock-resistant ter-minals, suitable for automatic screwdriver assembly, as well as "Dead Front" construction characteristics.Available with a Visi-Rocker two-color actuator, which can be specified to indicate either the ON or the TRIPPED/OFF mode,or solid color rocker or handle type actuators. All actuator types fit in the same industry standard panel cutouts.0.02 - 50 amps, up to 480 VAC or 65 VDC, 1 - 4 poles (Handle),1 - 3 poles (Rocker), with a choice of time delays.Number of PolesRocker Type: 1-3; Handle Type: 1-4 Internal Circuit Config. Switch Only and Series Trip with cur-rent or voltage trip coils.WeighApproximately 128 grams/pole (Approximately 4.57 ounces/pole)Standard Colors Housing - Black; Actuator - See Ordering Scheme.MountingMounts on a standard 35mmSymmetrical DIN Rail (35 x 7.5 or 35x 15mm per DIN EN5002).MechanicalElectricalPhysicalEndurance10,000 ON-OFF operations @ 6 per minute; with rated Current and Voltage.Trip FreeAll D-Series Circuit Breakers will trip on overload,even when actuator is forcibly held in the ON position.Trip IndicationThe operating actuator moves posi-tively to the OFF position when an overload causes the breaker to trip.Designed and tested in accordance with requirements of specifi-cation MIL-PRF-55629 & MIL-STD-202 as follows:Shock Withstands 100 Gs,6ms,sawtoothwhile carrying rated current per Method 213,Test Condition "I".Instantaneous and ultra-short curves tested @ 90% of rated current.Vibration Withstands 0.060" excursion from10-55 Hz,and 10 Gs 55-500 Hz,at rated current per Method 204C,Test Condition A. Instantaneous and ultra-short curves tested at 90% of rated current.Moisture Resistance Method 106D,i.e.,ten 24-hourcycles @ + 25°C to +65°C,80-98%RH.Salt Spray Method 101,Condition A (90-95%RH @ 5% NaCl Solution,96 hrs).Thermal Shock Method 107D,Condition A (Fivecycles @ -55°C to +25°C to +85°C to +25°C).Operating Temperature -40°C to +85°CEnvironmental020 0.0200250.0250300.0300500.050075 0.0750800.0800850.0852100.1002150.1502200.2002250.2502300.3002350.3502400.4002450.450250 0.5002550.5502600.6002650.6502700.7002750.7502800.8002850.850410 1.000512 1.250413 1.300414 1.400415 1.500517 1.750420 2.000522 2.250425 2.500527 2.750430 3.000532 3.250435 3.500436 3.600440 4.000445 4.500547 4.750450 5.000455 5.500460 6.000465 6.5004707.0005727.2504757.5004808.0004858.5004909.0004959.500610 10.00071010.50061111.00071111.50061212.00071212.50061313.00061414.000615 15.00061616.00061717.00061818.00061919.00062020.00062121.00062222.000623 23.00062424.00062525.00062626.00062727.00062828.00062929.00063030.00063232.00063535.00064040.00064545.00065050.000A06 6 DC, 5 DC A1212 DC, 10 DC A1818 DC, 15 DC A2424 DC, 20 DC A3232 DC, 25 DC A4848 DC, 40 DC A6565 DC, 55 DC J06 6 AC, 5 AC J1212 AC, 10 AC J1818 AC, 15 ACJ2424 AC, 20 AC J4848 AC, 40 AC K20120 AC, 65 AC L40240 AC, 130 AC10Agency Approval8Actuator Color8 ACTUATOR COLOR & LEGEND Actuator orVisi-Color Marking: Marking Color: Single Color Visi-Rocker Color:I-O ON-OFF Dual Rocker/Handle (Actuator Black)8White A B 1Black White Black C D 2White n/a Red F G 3White Red Green H J 4White Green Blue K L 5White Blue Y ellow M N 6Black Y ellow Gray P Q 7Black Gray OrangeRS8Black Orange10 AGENCY APPROVAL C UL Recognized & CSA Certified D VDE Certified, UL Recognized & CSA Certified9 MOUNTING/VOLTAGEMOUNTING STYLE VOLTAGE Threaded Insert 16-32 x 0.195 inches< 300C 96-32 X 0.195 inches ≥300 2ISO M3 x 5mm< 300D 9ISO M3 x 5mm ≥3007 TERMINAL1#10 Screw & Pressure Plate for Direct Wire Connection 2#10 Screw without Pressure Plate3 POLES 1One2Two 3Three4Four5 FREQUENCY & DELA Y 03DC 50/60Hz, Switch Only 105DC Instantaneous 11DC Ultra Short 12DC Short 14DC Medium 16DC Long20550/60Hz Instantaneous 2150/60Hz Ultra Short 2250/60Hz Short 2450/60Hz Medium2650/60Hz Long32DC, 50/60Hz Short 34DC, 50/60Hz Medium 36DC, 50/60Hz Long42650/60Hz Short, Hi-Inrush 44650/60Hz Medium, Hi-Inrush 46650/60Hz Long, Hi-Inrush 527DC, Short,Hi-Inrush 547DC,Medium, Hi-Inrush 567DC, Long, Hi-Inrush4 CIRCUITA0 Switch Only (No Coil) 4B0Series Trip (Current)C0Series Trip (Voltage)1 SERIES D6Current Rating4Circuit3Poles2Actuator9Mounting/Voltage7Terminal5Frequency & Delay1SeriesNotes:1 Handle breakers available up to four poles. Rocker breakers available up to three poles.2Actuator Code:A: Multi-pole units factory assembled with common handle tie.B: Handle location as viewed from front of breaker:2 pole - left pole3 pole - center pole4 pole - two handles at center poles3Multipole rocker breakers have one rocker per breaker, as viewed from the front of thepanel. Two pole - left pole. Three pole - center pole 4≤30A, select Current Rating code 630. 31-50A, select Current Rating code 650.5Voltage coil only available with delay codes 10 & 20.6Available to 50A max with circuit code BO only.7Available to 50A (UL/CSA), 30A (VDE) with circuit code BO only.8Color shown is visi and legend with remainder of rocker black.9≥300V: Three pole breaker 3Ø or 2 pole breaker 1Ø, UL/CSA limited to 30 FLA max.10VDE Approval requires Dual (I-O, ON-OFF) or I-O markings6 CURRENT RATING (AMPERES)OR VOLTAGE COIL (VOLTS, MIN. TRIP RATING)5P0LE 3P0LE 2P0LE 1SERIES TRIP (2 TERM'S.)LINELINEROCKER ACTUATOR INDICATE "ON"HANDLE ACTUATORSWITCH ONL Y (2 TERM'S.)#10-32 SCREW AND PRESSURE PLA TE PER TERMINAL"MULTI-POLE IDENTIFICATION SCHEMENotes:1All dimensions are in inches [millimeters].2T olerance ±.015 [.38] unless otherwise specified.3-POLE(DF3) 3-POLE(DC3)REMOVALASSEMBL YNotes:1All dimensions are in inches [millimeters].2T olerance ±.015 [.38] unless otherwise specified.3Dimensions apply to all variations shown. Notice that circuit breaker line and load termi-nal orientation on indicate OFF is opposite of indicate ON.4For pole orientation with horizontal legend, rotate front view clockwise 90°.Notes:1All dimensions are in inches [millimeters].2T olerance ±.010 [.25] unless otherwise specified.。
扩展回归模型手册说明书

Contents Intro.................................Introduction to extended regression models manual Intro1.........................................An introduction to the ERM commands Intro2....................................................The models that ERMsfit Intro3................................................Endogenous covariates features Intro4..........................................Endogenous sample-selection features Intro5.................................................Treatment assignment features Intro6.....................................Panel data and grouped data model features Intro7.........................................................Model interpretation Intro8...............................A Rosetta stone for extended regression commands Intro9.....................................Conceptual introduction via worked exampleeintreg..................................................Extended interval regression eintreg postestimation........................Postestimation tools for eintreg and xteintreg eintreg predict........................................predict after eintreg and xteintreg eoprobit............................................Extended ordered probit regression eoprobit postestimation.....................Postestimation tools for eoprobit and xteoprobit eoprobit predict.....................................predict after eoprobit and xteoprobit eprobit....................................................Extended probit regression eprobit postestimation........................Postestimation tools for eprobit and xteprobit eprobit predict........................................predict after eprobit and xteprobit eregress...................................................Extended linear regression eregress postestimation.....................Postestimation tools for eregress and xteregress eregress predict.....................................predict after eregress and xteregress ERM options........................................Extended regression model optionsestat teffects......................Average treatment effects for extended regression modelsExample1a.......................Linear regression with continuous endogenous covariate Example1b......................Interval regression with continuous endogenous covariate Example1c..............Interval regression with endogenous covariate and sample selection Example2a...........................Linear regression with binary endogenous covariate Example2b..................................Linear regression with exogenous treatment Example2c.................................Linear regression with endogenous treatment Example3a........................Probit regression with continuous endogenous covariate Example3b.....................Probit regression with endogenous covariate and treatment Example4a...........................Probit regression with endogenous sample selection Example4b...............Probit regression with endogenous treatment and sample selectionExample5............................Probit regression with endogenous ordinal treatmentExample6a..........................Ordered probit regression with endogenous treatment Example6b........Ordered probit regression with endogenous treatment and sample selection Example7.................Random-effects regression with continuous endogenous covariate Example8a.....................Random effects in one equation and endogenous covariateiii ContentsExample8b.........Random effects,endogenous covariate,and endogenous sample selection Example9..........Ordered probit regression with endogenous treatment and random effects predict advanced...........................................predict’s advanced features predict treatment.........................................predict for treatment statistics Triangularize.................................How to triangularize a system of equationsGlossary.........................................................................Subject and author index...........................................................Contents iii Stata,Stata Press,and Mata are registered trademarks of StataCorp LLC.Stata andStata Press are registered trademarks with the World Intellectual Property Organization®of the United Nations.Other brand and product names are registered trademarks ortrademarks of their respective companies.Copyright c 1985–2023StataCorp LLC,College Station,TX,USA.All rights reserved.。
DrBats 0.1.6 商品说明书

Package‘DrBats’October12,2022Type PackageTitle Data Representation:Bayesian Approach That's SparseVersion0.1.6Maintainer Benedicte Fontez<***************************>Description Feed longitudinal data into a Bayesian Latent Factor Model to obtaina low-rank representation.Parameters are estimated using a HamiltonianMonte Carlo algorithm with STAN.See G.Weinrott,B.Fontez,N.Hilgert andS.Holmes,``Bayesian Latent Factor Model for Functional Data Analysis'',Actes des JdS2016.Depends R(>=3.1.0),rstanImports ade4,coda,MASS,Matrix,sdeLicense GPL-3Encoding UTF-8LazyData TRUESuggests fda,ggplot2,knitr,parallel,rmarkdown,testthatVignetteBuilder knitrNeedsCompilation noAuthor Gabrielle Weinrott[aut],Brigitte Charnomordic[ctr],Benedicte Fontez[cre,aut],Nadine Hilgert[ctr],Susan Holmes[ctr],Isabelle Sanchez[ctr]RoxygenNote7.1.2Repository CRANDate/Publication2022-02-1319:00:12UTCR topics documented:coda.obj (2)12coda.obj coinertia.drbats (3)drbats.simul (4)histoProj (5)modelFit (6)pca.Deville (7)pca.proj.Xt (8)postdens (9)stanfit (10)toydata (10)visbeta (11)visW (12)W.QR (13)weighted.Deville (14)Index15 coda.obj Convert a STAN objet to MCMC listDescriptionConvert a STAN objet to MCMC listUsagecoda.obj(stanfit)Argumentsstanfit a STAN objectValuecodafit an mcmc.listAuthor(s)Gabrielle WeinrottExamplesdata(stanfit)#output of modelFit or main.modelFitcoda.fit<-coda.obj(stanfit)head(coda.fit)coinertia.drbats3coinertia.drbats Perform Coinertia Analysis on the PCA of the Weighted PCA and Dev-ille’s PCADescriptionPerform Coinertia Analysis on the PCA of the Weighted PCA and Deville’s PCAUsagecoinertia.drbats(X.histo=NULL,Qp=NULL,X=NULL,t=NULL,t.range=c(0,1000),breaks)ArgumentsX.histo the data matrix projected onto the histogram basisQp a matrix of weights,if Qp=NULL the function specifies a diagonal weight matrixX a data matrix,if X.histo is NULL and needs to be builtt a matrix of observation times,if X.histo is NULL and needs to be builtt.range the range of observation times in vector form,if X.histo is NULL and needs to be built(default:t.range=c(0,1000))breaks integer number of histogram windowsValueco_weight the co-inertia objectAuthor(s)Gabrielle WeinrottExamplesres<-drbats.simul(N=5,P=100,t.range=c(5,100),breaks=8)res.coinertia<-coinertia.drbats(X=res$X,t=res$t.simul,t.range=c(5,100),breaks=8) res.coinertia4drbats.simul drbats.simul Main simulation functionDescriptionMain simulation functionUsagedrbats.simul(N=10,P=150,t.range=c(0,1000),b.range=c(0.2,0.4),c.range=c(0.6,0.8),b.sd=2,c.sd=2,a.range=c(-0.4,0.4),y.range=c(0,10),amp=10,per=12,data.type="sparse",breaks=15,sigma2=0.2,seed=NULL)ArgumentsN integer number of functions to simulate(default=10)P a number of observation times(default=150)t.range a range of times in which to place the P observations(default=c(1,1000))b.range a vector giving the range of values for the mean of thefirst mode(default b.range=c(0.2,0.4))c.range a vector giving the range of values for the mean of the second mode(defaultc.range=c(0.6,0.8))b.sd the standard deviation for thefirst mode(default b.sd=2)c.sd the standard deviation for the second mode(default c.sd=2)a.range a vector giving the range of values for the slope(default a.range=c(-0.4,0.4))y.range a vector giving the range of values for the intercept(default y.range=c(0,10)) amp the amplitude of the cosine function(default=10)per the periodicity of the cosine function(default=12)data.type string indicating type of functions(options:sparse,sparse.tend,sparse.tend.cos)histoProj5breaks number of breaks in the histogram basissigma2the precision of the error terms(default=0.2)seed integer specification of a seed(default=NULL)ValueY.simul a list containing a matrix Y,a matrix beta,and a matrix epsilont.simul a matrix of simulated observation timesX the underlying signal to build the data,see DataSimulationandProjection vignetteproj.pca the outputs of the function pca.proj.Xtwlu the outputs of the function W.QRAuthor(s)Gabrielle WeinrottExamplesres<-drbats.simul(N=5,P=100,t.range=c(5,100),breaks=8)X<-res$Xt<-res$t.simul#To plot the observations,ie the rowsmatplot(t(t),t(X),type= l ,xlab="Time",ylab="X")histoProj Project a set of curves onto a histogram basisDescriptionProject a set of curves onto a histogram basisUsagehistoProj(X,t,t.range,breaks)ArgumentsX a matrixt a matrix of observation timest.range a range of times in which to place the P projections(default=c(0,1000))breaks the number of intervals in the histogram basis6modelFitValueX.proj the matrix X after projectionX.count a matrix containing the number of observations used to build the projection onto the his-togram basiswindows a vector containing thefirst time of each window of the histogram intervalsX.max the matrix of minimum values in each windowX.min the matrix of maximum values in each windowAuthor(s)Gabrielle WeinrottExamplesres<-drbats.simul(N=5,P=100,t.range=c(5,100),breaks=8)res.proj<-histoProj(res$X,res$t.simul,t.range=c(5,100),breaks=8)res.projmodelFit Fit a Bayesian Latent Factor to a data set using STANDescriptionFit a Bayesian Latent Factor to a data set using STANUsagemodelFit(model="PLT",var.prior="IG",prog="stan",parallel=TRUE,Xhisto=NULL,nchains=4,nthin=10,niter=10000,R=NULL)Argumentsmodel a string indicating the type of model("PLT",or sparse",default="PLT")var.prior the family of priors to use for the variance parameters("IG"for inverse gamma, or"cauchy")pca.Deville7 prog a string indicating the MCMC program to use(default="stan")parallel true or false,whether or not to parelleize(done using the package"parallel") Xhisto matrix of simulated data(projected onto the histogram basis)nchains number of chains(default=2)nthin the number of thinned interations(default=1)niter number of iterations(default=1e4)R rotation matrix of the same dimension as the number of desired latent factors Valuestanfit,a STAN objectAuthor(s)Gabrielle WeinrottReferencesThe Stan Development Team Stan Modeling Language User’s Guide and Reference Manual./pca.Deville Perform a PCA using Deville’s methodDescriptionPerform a PCA using Deville’s methodUsagepca.Deville(X,t,t.range,breaks)ArgumentsX a data matrixt a matrix of observation times corresponding to Xt.range the range of observation times in vector form(ex.t.range=c(0,1000))breaks integer number of histogram windowsValueX.histo the matrix projected onto the histogram basisU.histo a matrix of eigenvectors in the histogram basisCp a matrix of principal componentslambda a vector of eigenvaluesmbda a vector of the percentage of total inertia explained by each principal component8pca.proj.Xt Author(s)Gabrielle WeinrottReferencesJC Deville,"Methodes statisiques et numeriques de l’analyse harmonique",Annales de l’INSEE, 1974.Examplesres<-drbats.simul(N=5,P=100,t.range=c(5,100),breaks=8)res.pca<-pca.Deville(res$X,res$t.simul,t.range=c(5,100),breaks=8)res.pcapca.proj.Xt PCA data projected onto a histogram basisDescriptionPCA data projected onto a histogram basisUsagepca.proj.Xt(X,t,t.range=c(0,1000),breaks=15)ArgumentsX the data matrixt the matrix of observation timest.range a vector specifying the observation time range(default:c(0,1000))breaks the number of breaks in the histogram basis(default:breaks=15)ValueXt.proj a matrix of projected observationsU a matrix of eigenvectorslambda a vector of eigenvalueslambda.perc the percentage of inertia captured by each axisAuthor(s)Gabrielle Weinrottpostdens9 Examplesres<-drbats.simul(N=5,P=100,t.range=c(5,100),breaks=8)pca.proj.Xt(res$X,res$t.simul,t.range=c(0,100),breaks=8)postdens Calculate the unnormalized posterior density of the modelDescriptionCalculate the unnormalized posterior density of the modelUsagepostdens(mcmc.output,Y,D,chain=1)Argumentsmcmc.output an mcmc list as produced by clean.mcmcY the data matrixD the number of latent factorschain the chain to plot(default=1)Valuepost a vector containing the posterior density at each iteration##’@examplesAuthor(s)Gabrielle WeinrottExamplesdata("toydata")data("stanfit")dens<-postdens(coda.obj(stanfit),Y=toydata$Y.simul$Y,D=2,chain=1)hist(dens)10toydata stanfit A stanfit objectfitted to the toydataDescriptionA stanfit objectfitted to the toydataUsagestanfitFormatA large stanfit objecttoydata A toy longitudinal data setDescriptionA toy longitudinal data setUsagetoydataFormatA list with5elements:Y.simul a list of simulated data with3elementst.simul a matrix with5rows and150columns giving the observation times of the original data X the original data matrix with5rows and150columnsproj.pca a list with4elements:results of the function histoProj(X,t,t.range=c(0,1000),breaks =8)wlu a list with4elements:results of the function W.QR(U,lambda)where U and lambda are the results of the PCA of Xvisbeta11 visbeta Format scores output for visualizationDescriptionFormat scores output for visualizationUsagevisbeta(mcmc.output,Y,D,chain=1,axes=c(1,2),quant=NULL)Argumentsmcmc.output an mcmc list as produced by clean.mcmcY the matrix of dataD the number of latent factorschain the chain to use(default=1)axes the axes to use(default=c(1,2))quant a vector of quantiles to retain(default=NULL)Valuemean.df are the MCMC estimates for the parmeterspoints.df contains all of the estimates of the chaincontour.df contains the exterior points of the convex hull of the cloud of estimatesAuthor(s)Gabrielle WeinrottExamplesdata("toydata")data("stanfit")codafit<-coda.obj(stanfit)##convert to mcmc.listbeta.res<-visbeta(codafit,Y=toydata$Y.simul$Y,D=toydata$wlu$D,chain=1,axes=c(1,2),quant=c(0.05,0.95))ggplot2::ggplot()+ggplot2::geom_path(data=beta.res$contour.df,ggplot2::aes(x=x,y=y,colour=ind))+ ggplot2::geom_point(data=beta.res$mean.df,ggplot2::aes(x=x,y=y,colour=ind))12visW visW Plot the estimates for the latent factorsDescriptionPlot the estimates for the latent factorsUsagevisW(mcmc.output,Y,D,chain=1,factors=c(1,2))Argumentsmcmc.output an mcmc list as produced by clean.mcmcY the matrix of dataD the number of latent factorschain the chain to plot(default=1)factors a vector indicating the factors to plot(default=c(1,2))Valueres.W a data frame containing the estimates for the factors,and their lower and upper bounds Inertia the percentage of total inertia captured by each of the factorsAuthor(s)Gabrielle WeinrottExamplesdata("toydata")data("stanfit")codafit<-coda.obj(stanfit)##convert to mcmc.listW.res<-visW(codafit,Y=toydata$Y.simul$Y,D=toydata$wlu$D,chain=1,factors=c(1,2))##plot the resultsdata<-data.frame(time=rep(1:9,2),W.res$res.W)ggplot2::ggplot()+ggplot2::geom_step(data=data,ggplot2::aes(x=time,y=Estimation,colour=Factor))+ ggplot2::geom_step(data=data,ggplot2::aes(x=time,y=Lower.est,colour=Factor), linetype="longdash")+ggplot2::geom_step(data=data,ggplot2::aes(x=time,y=Upper.est,colour=Factor), linetype="longdash")W.QR13 W.QR Build and decompose a low-rank matrix WDescriptionBuild and decompose a low-rank matrix from a matrix of eigenvectors and eigenvalues from prin-cipal component analysisUsageW.QR(U,lambda)ArgumentsU a matrix of eigenvectorslambda a vector of corresponding eigenvaluesValueW a low-rank matrixD the number of latent factorsQ the orthogonal matrix of the W=QR matrix decompositionR the upper triangular matrix of the W=QR matrix decompositionAuthor(s)Gabrielle WeinrottExamplesres<-drbats.simul(N=5,P=100,t.range=c(5,100),breaks=8)res.pca<-pca.Deville(res$X,res$t.simul,t.range=c(5,100),breaks=8)Wres.pca<-W.QR(res.pca$U,res.pca$lambda)Wres.pca14weighted.Devilleweighted.Deville Perform a weighted PCA using Deville’s method on a data matrix Xthat we project onto a histogram basis and weightedDescriptionPerform a weighted PCA using Deville’s method on a data matrix X that we project onto a histogram basis and weightedUsageweighted.Deville(X,t,t.range,breaks,Qp=NULL)ArgumentsX a data matrixt a matrix of observation times corresponding to Xt.range the range of observation times in vector form(ex.t.range=c(a,b))breaks integer number of histogram windowsQp a matrix of weights,if Qp=NULL the function specifies a diagonal weightmatrixValueX.histo the matrix projected onto the histogram basisU.histo a matrix of eigenvectors in the histogram basisCp a matrix of principal componentslambda a vector of eigenvaluesmbda a vector of the percentage of total inertia explained by each principal componentAuthor(s)Gabrielle WeinrottExamplesres<-drbats.simul(N=5,P=100,t.range=c(5,100),breaks=8)res.weighted<-weighted.Deville(res$X,res$t.simul,t.range=c(5,100),breaks=8,Qp=NULL) res.weightedIndex∗datasetsstanfit,10toydata,10coda.obj,2coinertia.drbats,3drbats.simul,4histoProj,5modelFit,6pca.Deville,7pca.proj.Xt,8postdens,9stanfit,10toydata,10visbeta,11visW,12W.QR,13weighted.Deville,1415。
SMC电动阀类产品说明书
Instruction ManualElectric Actuator / Rod Type Series LEYGMotor: AC servo motor (100-200 VAC)The intended use of thisElectrical Actuator is to convert an electrical input signal into mechanical motion.1 Safety InstructionsThese safety instructions are intended to prevent hazardous situations and/or equipment damage. These instructions indicate the level of potential hazard with the labels of “Caution,” “Warning” or “Danger.” They are all important notes for safety and must be followed in addition to International Standards (ISO/IEC) *1), and other safety regulations. *1)ISO 4414: Pneumatic fluid power - General rules relating to systems. ISO 4413: Hydraulic fluid power - General rules relating to systems.IEC 60204-1: Safety of machinery - Electrical equipment of machines. (Part 1: General requirements)ISO 10218-1: Manipulating industrial robots -Safety. etc.∙ Refer to the product catalogue, Operation Manual and Handling Precautions for SMC Products for additional information. ∙ Keep this manual in a safe place for future reference.CautionCaution indicates a hazard with a low level of risk which, ifnot avoided, could result in minor or moderate injury.WarningWarning indicates a hazard with a medium level of riskwhich, if not avoided, could result in death or serious injury.DangerDanger indicates a hazard with a high level of risk which, ifnot avoided, will result in death or serious injury.Warning∙ Always ensure compliance with relevant safety laws and standards.All work must be carried out in a safe manner by a qualified person in compliance with applicable national regulations.2 SpecificationsSeries LEYG - Motor: Step [servo 24 VDC]Product Weight [kg]30501001502002503003050100150200250300Incremental E ncoder[S2] 1.80 1.99 2.31 2.73 3.07 3.41 3.67 1.81 2.02 2.26 2.69 2.95 3.27 3.51AbsoluteE ncoder[S6] 1.86 2.05 2.37 2.79 3.13 3.47 3.73 1.87 2.08 2.32 2.75 3.01 3.33 3.57AbsoluteE ncoder[T6] 1.80 2.00 2.40 2.80 3.10 3.50 3.70 1.90 2.10 2.30 2.70 3.00 3.30 3.60Absolute E ncoder[V6]1.701.902.202.603.003.303.601.701.902.202.602.903.203.4030501001502002503003050100150200250300Incremental E ncoder[S2] 3.24 3.50 4.05 4.80 5.35 5.83 6.28 3.24 3.51 3.90 4.64 5.06 5.56 5.96AbsoluteE ncoder[S6] 3.18 3.44 3.99 4.74 5.29 5.77 6.22 3.18 3.45 3.84 4.58 5.00 5.50 5.90AbsoluteE ncoder[T6] 3.20 3.40 4.00 4.70 5.30 5.70 6.20 3.20 3.40 3.80 4.60 5.00 5.50 5.90Absolute E ncoder[V6]3.103.404.004.705.305.706.203.103.403.804.505.005.505.90In-line Motor Type30501001502002503003050100150200250300IncrementalE ncoder[S2] 1.83 2.02 2.34 2.76 3.10 3.44 3.70 1.84 2.05 2.29 2.72 2.98 3.30 3.54AbsoluteE ncoder[S6] 1.89 2.08 2.40 2.82 3.16 3.50 3.76 1.90 2.11 2.35 2.78 3.04 3.36 3.60AbsoluteE ncoder[T6] 1.90 2.10 2.40 2.80 3.10 3.50 3.70 1.90 2.10 2.30 2.80 3.00 3.30 3.60Absolute E ncoder[V6]1.701.902.202.603.003.303.601.702.002.202.602.903.203.4030501001502002503003050100150200250300Incremental E ncoder[S2] 3.26 3.52 4.07 4.82 5.37 5.85 6.30 3.26 3.53 3.92 4.66 5.08 5.58 5.98AbsoluteE ncoder[S6] 3.20 3.46 4.01 4.76 5.31 5.79 6.24 3.20 3.47 3.86 4.60 5.02 5.52 5.92AbsoluteE ncoder[T6] 3.20 3.40 4.00 4.70 5.30 5.80 6.20 3.20 3.40 3.80 4.60 5.00 5.50 5.90Absolute E ncoder[V6]3.203.404.004.705.305.806.203.203.403.804.605.005.505.90Stroke[mm] TypeofMotorLEYG32M LEYG32L Stroke[mm] TypeofMotorSeriesSeriesLEYG25M LEYG25L LEYG25M LEYG25L Stroke[mm] SeriesLEYG32M LEYG32L Stroke[mm] TypeofMotorTypeofMotorSeries2 Specifications (continued)A dditional Weight2532Incremental E ncoder[S2]0.200.40Absolute E ncoder[S6]0.300.66Absolute E ncoder[T6]0.300.70Absolute E ncoder[V6]0.300.60Size LockNote 1) Please consult with SMC for non-standard strokes produced tospecial order.Note 2) This is the maximum value of the horizontal work load. Anexternal guide is necessary to support the load. The actual work load changes according to the condition of the external guide. Confirm the load using the actual device.Note 3) Thrust setting range when "pushing" operation in torque controlmode, etc. Refer to the thrust conversion graph shown in the catalogue as a guide.Set value LEYG25#S/32#S: 15 to 30% Set value LEYG25#T/32#T: 12 to 24% Set value LEYG25#V/32#V: 45 to 90%Note 4) The allowable speed changes according to the stroke.Note 5) The allowable collision speed for collision with the workpiecewith the torque control mode.Note 6) A reference value for correcting an error in reciprocal operation. Note 7) Impact resistance: No malfunction occurred when the actuatorwas tested with a drop tester in both an axial direction and perpendicular direction to the lead screw (the test was performed with the actuator in the initial state).Vibration resistance:No malfunction occurred in a test ranging between 45 to 2000 Hz, when the actuator was tested in both an axial direction and a perpendicular direction to the lead screw (the test was performed with the actuator in the initial state).Note 8) When the motor type is "T6-T9",the resolution will changedepending on the driver type.Note 9) The maximum instantaneous power consumption (including thedriver) is for when the actuator is operating.Note 10) Only when the motor option, "with lock", is selected.Note 11) For an actuator with lock, add the power consumption for thelock.WarningFor special products which include a suffix of “-X#”, “-D#”, please refer to the customer drawing of that specific product.3 Installation3.1 InstallationWarning∙ Do not install the product unless the safety instructions have been read and understood.∙ Do not use the product in excess of its allowable specification as listed in Section 2.∙ Ensure the product is sized correctly and is suitable for the application. ∙ Do not operate the product by fixing the piston rod and moving the actuator body.∙ When installing, inspecting or performing maintenance on the product, be sure to turn off the power supplies. Then, lock it so it cannot be tampered with while work is happening.3.2 EnvironmentWarning∙ Do not use in an environment where corrosive gases, chemicals, salt water or steam are present.∙ Do not use in an explosive atmosphere.∙ Do not expose to direct sunlight. Use a suitable protective cover.∙ Do not install in a location subject to vibration or impact in excess of the product’s specifications .∙ Do not mount in a location exposed to radiant heat that would result in temperatures in excess of the product’s specifications. ∙ Prevent foreign particles from entering the product.3 Installation (continued)3.3 MountingWarning∙ Observe the required tightening torque for screws.Unless stated otherwise, tighten the screws to the recommended torque for mounting the product.∙ Do not make any alterations to the product.Alterations made to this product may lead to a loss of durability and damage to the product, which can lead to injury and damage to other equipment and machinery.Do not scratch or dent the sliding parts of the table or mounting face etc., by striking or holding them with other objects. The components are manufactured to precise tolerances, so that even a slight deformation may cause faulty operation or seizure.∙ Do not use the product until it has been verified that the equipment can be operated correctly.After mounting or repair, connect the power supply to the product and perform appropriate functional inspections to check it is mounted correctly.∙ Do not use the product until it has been verified that the equipment can be operated correctly.∙ After mounting or repair, connect the power supply to the product and perform appropriate functional inspections to check it is mounted correctly.∙ Allow sufficient space for maintenance and inspection.Caution∙ When mounting the product, use screws with adequate length and tighten them to the recommended torque.Tightening with larger torque than the specified range may cause mal-function while the tightening with smaller torque can allow the displacement of actuator position. In extreme conditions the actuator could become detached from it’s mounting position.Work fixed / Plate tapped typeTighten the product mounting screws to the specified torque.Tightening to a torque over the specified range can cause operation failure, and insufficient torque can cause displacing or dropping of the attachment.Body fixed / Top mountingBody fixed / Bottom mounting Mounting / Head side tapped styleModel Screw Max.tighteningtorque [Nm]Max. thread depth [mm] LEYG25 M5 x 0.8 3.0 12LEYG32 M6 x 1.0 5.2 12 Model Screw Max.tighteningtorque [Nm]Max. thread depth [mm] LEYG25 M5 x 0.8 3.0 40.3LEYG32 M6 x 1.0 5.2 50.3ORIGINAL INSTRUCTIONSModelLEYG25 LEYG25D (Parallel/In-line )LEYG32 (Parallel type) LEYG32D (In-line type) A c t u a t o r Stroke [mm] Note1)30, 50, 100, 150, 200, 250,300 30, 50, 100, 150, 200, 250,300 30, 50, 100, 150,200, 250,300 Work load [kg] HorizontalNote 2)18 50 50 30 60 60 30 60 60 Vertical 7 15 29 7 17 35 10 22 44Pushing force [N] Note3)65 to 131 127 to 255 242 to 485 79 to 157 154 to 308 294 to 588 98 to 197 192 to 385 368 to 736Maximum Speed[mm/s]Note4)900 450 225 1200 600 300 1000 500 250 Pushing Speed [mm/s]Note5)35 or less 30 or less Acceleration / Deceleration [mm/s 2] 5000 Positioningrepeatability [mm] Basic type ±0.02 Highprecision ±0.01Lost motion [mm] Note6) Basic type 0.1 or lessHigh precision 0.05 or lessLead [mm](including pulley ratio)12 6 3 20 10 5 16 8 4 Impact resistance/vibrationResistance [m/s 2] Note7)50 / 20 Actuation type Ball screw and Belt [1:1] / Ball screw Ball screw and Belt[1.25:1] Ball screwGuide typeSliding bearing (LEYG#M), Ball bush bearing (LEYG#L) Operating temperature range [℃] 5 to 40 Operating humidity range [%RH] 90 or less(No condensation) Regenerative optionMay be required by speed and work load(Refer to catalogue)E l e c t r i c a l Motor output/size 100W /☐40 200W /☐60 Type of MotorAC servo motor (100 / 200 VAC) Encoder Note8) Motor type S2-S3:Incremntal 17-bit encoder(Resolution:131072 p/rev)Motor type S6-S7:Absolute 18-bit encoder (Resolution:262144 p/rev)Motor type T6-T7:Absolute 22-bit encoder(Resolution:4194304 p/rev) Motor type V6-V7:Absolute 20-bit encoder (Resolution:1048576 p/rev) Maximum instantaneous power consumption [W] Note9) 445 724 L o c k u n i tType Note10) Non magneting lock Holding force [N] 131 255 485 157 308 588 197 385 736 Power consumption [W] at 20 ℃ Note11) LEY*G(S/T)* /LEY*G V * 6.3 / 5.5 7.9 / 6 Rated voltage[V] 24 VDC 0-10% Model Screw Max.tighteningtorque [Nm]Max. thread depth [mm] LEYG25 M5 x 0.8 3.0 8 LEYG32 M6 x 1.0 5.2 10Model Screw Max.tighteningtorque [Nm] Max. thread length [mm]LEYG25 M6 x 1.05.2 11 LEYG32 M6 x 1.0 5.2 123 Installation (continued)3.4 LubricationCaution∙SMC products have been lubricated for life at manufacture, and do notrequire lubrication in service.∙If a lubricant is used in the system, refer to catalogue for details.∙The recommended grease is lithium grade No.2Applied Region Grease Pack Number Weight [g]Piston rodGuideGR-S-010 10GR-S-020 20∙For products which include a “25A-” prefix the recommended grease islow condensation grease.Applied Region Grease Pack Number Weight [g]Piston rodGuideGR-D-010 104 Wiring4.1 WiringWarning∙Adjustment, mounting or wiring changes should not be carried outbefore disconnecting the power supply to the product.Electric shock, malfunction and damage can result.∙Do not disassemble the cables.∙Use only specified cables.Use only specified cables otherwise there may be risk of fire anddamage.∙Do not connect or disconnect the wires, cables and connectors whenthe power is turned on.Caution∙Wire the connector correctly and securely.Check the connector for polarity and do not apply any voltage to theterminals other than those specified in the Operation Manual.∙Take appropriate measures against noise.Noise in a signal line may cause malfunction. As a countermeasureseparate the high voltage and low voltage cables, and shorten thewiring lengths, etc.∙Do not route input/output wires and cables together with power or highvoltage cables.The product can malfunction due to noise interference and surgevoltage from power and high voltage cables close to the signal line.Route the wires of the product separately from power or high voltagecables.∙Take care that actuator movement does not catch cables.∙Operate with all wires and cables secured.∙Avoid bending cables at sharp angles where they enter the product.∙Avoid twisting, folding, rotating or applying an external force to thecable.Risk of electric shock, wire breakage, contact failure and loss of controlof the product can result.∙Select “Robotic cables”in applications where cables are movingrepeatedly (encoder/ motor/ lock).Refer to the relevant operation manual for the bending life of the cable.∙Confirm correct insulation.Poor insulation of wires, cables, connectors, terminals etc. can causeinterference with other circuits. Also there is the possibility thatexcessive voltage or current may be applied to the product causingdamage.∙R efer to the auto switch references in “Best Pneumatics“ when an autoswitch is to be used4.2 Actuator Ground connectionCaution∙The Actuator must be connected to ground to shield the actuator fromelectrical noise. The screw and cable with crimping terminal andtoothed washer should be prepared separately by the user.4 Wiring (continued)4.3 Wiring of Actuator to ControllerAC servo motor driverWarningUse only specified cables otherwise there may be risk of fire and damage5 How to Order∙For standard products, refer to the catalogue on the SMC website(URL: https://) for the how to order information.6 Outline Dimensions∙For standard products, refer to the catalogue on the SMC website(URL: https://) for outline dimensions.7 Maintenance7.1 General MaintenanceCaution∙Not following proper maintenance procedures could cause the productto malfunction and lead to equipment damage.∙If handled improperly electricity and compressed air can be dangerous.∙Maintenance of electromechanical and pneumatic systems should beperformed only by qualified personnel.∙Before performing maintenance, turn off the power supply and be sureto cut off the supply pressure. Confirm that the power has beendischarged and the air is released to atmosphere.∙After installation and maintenance, apply operating pressure andpower to the equipment and perform appropriate functional andleakage tests to make sure the equipment is installed correctly.∙If any electrical or pneumatic connections are disturbed duringmaintenance, ensure they are reconnected correctly and safety checksare carried out as required to ensure continued compliance withapplicable national regulations.∙Do not make any modification to the product.∙Do not disassemble the product, unless required by installation ormaintenance instructions.∙Incorrect handling can cause an injury, damage or malfunction of theequipment and machinery, so ensure that the procedure for the task isfollowed.∙Always allow sufficient space around the product to complete anymaintenance and inspection.7 Maintenance (continued)7.2 Periodical Maintenance∙Maintenance should be performed according to the table below:AppearanceCheckBelt CheckInspection before daily operation ✓Inspection every six months* ✓✓Inspection every 1,000 km* ✓✓Inspection every 5 million cycles* ✓✓*whichever of these occurs first.∙Following any maintenance, always perform a system check. Do notuse the product if any error occurs, as safety cannot be assured ifcaused by any un-intentional malfunction.7.3 Appearance Check∙The following items should be visually monitored to ensure that theactuator remains in good condition and there are no concerns flagged;・Loose Screws,・Abnormal level of dust or dirt,・Visual flaws / faults,・Cable connections,・Abnormal noises or vibrations.7.4 Belt Check∙If one of the 6 conditions below are seen, do not continue operatingthe actuator, contact SMC immediately.・Tooth shaped canvas is worn out.Canvas fibre becomes “fuzzy”, rubber is removed, and the fibre gainsa white colour. The lines of fibre become very unclear.・Peeling off or wearing of the side of the belt.The corner of the belt becomes round and frayed, with threadsbeginning to stick out.・Belt is partially cut.Belt is partially cut. Foreign matter could be caught in the teeth andcause flaws.・Vertical line of belt teeth.Flaw which is made when the belt runs on the flange.・Rubber back of the belt is softened and sticky.・Crack on the back of the belt.8 Limitations of Use8.1 Limited warranty and disclaimer/compliance requirements∙Refer to Handling Precautions for SMC Products.9 Product disposalThis product should not be disposed of as municipal waste. Check yourlocal regulations and guidelines to dispose of this product correctly, inorder to reduce the impact on human health and the environment.10 ContactsRefer to or www.smc.eu for your local distributor /importer.URL : http// (Global) http// (Europe)'SMC Corporation, 4-14-1, Sotokanda, Chiyoda-ku, Tokyo 101-0021, JapanSpecifications are subject to change without prior notice from the manufacturer.© 2021 SMC Corporation All Rights Reserved.Template DKP50047-F-085M24VDC(5) Lock cable(4) Encoder cable(3) Motor cable(1) Electric Actuator(2) DriverHostcontroller,etc(6) I/O Connector。
redhat6性能调优
Red Hat Enterprise Linux 6 Performance Tuning Guide Optimizing subsystem throughput in Red Hat Enterprise Linux 6Red Hat Subject Matter ExpertsPerformance Tuning GuideRed Hat Enterprise Linux 6 Performance Tuning Guide Optimizing subsystem throughput in Red Hat Enterprise Linux 6 Edition 1.0Author Red Hat Subject Matter ExpertsEditor Don DomingoEditor Laura BaileyCopyright © 2011 Red Hat, Inc. and others.The text of and illustrations in this document are licensed by Red Hat under a Creative Commons Attribution–Share Alike 3.0 Unported license ("CC-BY-SA"). An explanation of CC-BY-SA is available at /licenses/by-sa/3.0/. In accordance with CC-BY-SA, if you distribute this document or an adaptation of it, you must provide the URL for the original version.Red Hat, as the licensor of this document, waives the right to enforce, and agrees not to assert, Section 4d of CC-BY-SA to the fullest extent permitted by applicable law.Red Hat, Red Hat Enterprise Linux, the Shadowman logo, JBoss, MetaMatrix, Fedora, the Infinity Logo, and RHCE are trademarks of Red Hat, Inc., registered in the United States and other countries. Linux® is the registered trademark of Linus Torvalds in the United States and other countries.Java® is a registered trademark of Oracle and/or its affiliates.XFS® is a trademark of Silicon Graphics International Corp. or its subsidiaries in the United States and/or other countries.MySQL® is a registered trademark of MySQL AB in the United States, the European Union and other countries.All other trademarks are the property of their respective owners.1801 Varsity DriveRaleigh, NC 27606-2072 USAPhone: +1 919 754 3700Phone: 888 733 4281Fax: +1 919 754 3701The Performance Tuning Guide describes how to optimize the performance of a system running Red Hat Enterprise Linux 6. It also documents performance-related upgrades in Red Hat Enterprise Linux 6.While this guide contains procedures that are field-tested and proven, Red Hat recommends that you properly test all planned configurations in a testing environment before applying it to a production environment. You should also back up all your data and pre-tuning configurations.Preface v1. Document Conventions (v)1.1. Typographic Conventions (v)1.2. Pull-quote Conventions (vi)1.3. Notes and Warnings (vii)2. Getting Help and Giving Feedback (vii)2.1. Do You Need Help? (vii)2.2. We Need Feedback! (viii)1. Overview 11.1. Audience (1)1.2. Horizontal Scalability (2)1.2.1. Parallel Computing (2)1.3. Distributed Systems (3)1.3.1. Communication (3)1.3.2. Storage (4)1.3.3. Converged Networks (6)2. Red Hat Enterprise Linux 6 Performance Features 72.1. 64-Bit Support (7)2.2. Ticket Spinlocks (7)2.3. Dynamic List Structure (8)2.4. Tickless Kernel (8)2.5. Control Groups (9)2.6. Storage and File System Improvements (10)3. Monitoring and Analyzing System Performance 133.1. The proc File System (13)3.2. GNOME and KDE System Monitors (13)3.3. Built-in Command-line Monitoring Tools (14)3.4. Tuned and ktune (15)3.5. Application Profilers (15)3.5.1. SystemTap (15)3.5.2. OProfile (16)3.5.3. Valgrind (16)3.5.4. Perf (17)3.6. Red Hat Enterprise MRG (17)4. CPU 194.1. CPU and NUMA Topology (19)4.1.1. Using numactl and libnuma (21)4.2. NUMA and Multi-Core Support (22)4.3. NUMA enhancements in Red Hat Enterprise Linux 6 (24)4.3.1. Bare-metal and scalability optimizations (25)4.3.2. Virtualization optimizations (25)4.4. CPU Scheduler (26)4.4.1. Realtime scheduling policies (26)4.4.2. Normal scheduling policies (27)4.4.3. Policy Selection (27)4.5. Tuned IRQs (28)5. Memory 315.1. Huge Translation Lookaside Buffer (HugeTLB) (31)5.2. Huge Pages and Transparent Huge Pages (31)5.3. Capacity Tuning (32)5.4. Tuning Virtual Memory (34)iiiPerformance Tuning Guide6. Input/Output 376.1. Features (37)6.2. Analysis (37)6.3. Tools (39)6.4. Configuration (43)6.4.1. Completely Fair Queuing (CFQ) (43)6.4.2. Deadline I/O Scheduler (45)6.4.3. Noop (45)7. Storage 497.1. Tuning Considerations for File Systems (49)7.1.1. Formatting Options (49)7.1.2. Mount Options (50)7.1.3. File system maintenance (51)7.1.4. Application Considerations (51)7.2. Profiles for file system performance (51)7.3. File Systems (52)7.3.1. The Ext4 File System (52)7.4. The XFS File System (52)7.4.1. Basic tuning for XFS (53)7.4.2. Advanced tuning for XFS (53)7.5. Clustering (56)7.5.1. Global File System 2 (56)8. Networking 598.1. Network Performance Enhancements (59)8.2. Optimized Network Settings (60)8.3. Overview of Packet Reception (62)8.4. Resolving Common Queuing/Frame Loss Issues (63)8.4.1. NIC Hardware Buffer (63)8.4.2. Socket Queue (64)8.5. Multicast Considerations (65)A. Revision History 67 ivPreface1. Document ConventionsThis manual uses several conventions to highlight certain words and phrases and draw attention to specific pieces of information.In PDF and paper editions, this manual uses typefaces drawn from the Liberation Fonts1 set. The Liberation Fonts set is also used in HTML editions if the set is installed on your system. If not, alternative but equivalent typefaces are displayed. Note: Red Hat Enterprise Linux 5 and later includes the Liberation Fonts set by default.1.1. Typographic ConventionsFour typographic conventions are used to call attention to specific words and phrases. These conventions, and the circumstances they apply to, are as follows.Mono-spaced BoldUsed to highlight system input, including shell commands, file names and paths. Also used to highlight keycaps and key combinations. For example:To see the contents of the file my_next_bestselling_novel in your currentworking directory, enter the cat my_next_bestselling_novel command at theshell prompt and press Enter to execute the command.The above includes a file name, a shell command and a keycap, all presented in mono-spaced bold and all distinguishable thanks to context.Key combinations can be distinguished from keycaps by the hyphen connecting each part of a key combination. For example:Press Enter to execute the command.Press Ctrl+Alt+F2 to switch to the first virtual terminal. Press Ctrl+Alt+F1 toreturn to your X-Windows session.The first paragraph highlights the particular keycap to press. The second highlights two key combinations (each a set of three keycaps with each set pressed simultaneously).If source code is discussed, class names, methods, functions, variable names and returned values mentioned within a paragraph will be presented as above, in mono-spaced bold. For example: File-related classes include filesystem for file systems, file for files, and dir fordirectories. Each class has its own associated set of permissions.Proportional BoldThis denotes words or phrases encountered on a system, including application names; dialog box text; labeled buttons; check-box and radio button labels; menu titles and sub-menu titles. For example: Choose System → Preferences → Mouse from the main menu bar to launch MousePreferences. In the Buttons tab, click the Left-handed mouse check box and click1 https:///liberation-fonts/vPrefacevi Close to switch the primary mouse button from the left to the right (making the mousesuitable for use in the left hand).To insert a special character into a gedit file, choose Applications → Accessories → Character Map from the main menu bar. Next, choose Search → Find… from the Character Map menu bar, type the name of the character in the Search field and click Next. The character you sought will be highlighted in the Character Table. Double-click this highlighted character to place it in the Text to copy field and then click the Copy button. Now switch back to your document and choose Edit → Paste from the gedit menu bar.The above text includes application names; system-wide menu names and items; application-specific menu names; and buttons and text found within a GUI interface, all presented in proportional bold and all distinguishable by context.Mono-spaced Bold Italic or Proportional Bold ItalicWhether mono-spaced bold or proportional bold, the addition of italics indicates replaceable or variable text. Italics denotes text you do not input literally or displayed text that changes depending on circumstance. For example:To connect to a remote machine using ssh, type ssh username@ ata shell prompt. If the remote machine is and your username on thatmachine is john, type ssh john@.The mount -o remount file-system command remounts the named filesystem. For example, to remount the /home file system, the command is mount -oremount /home.To see the version of a currently installed package, use the rpm -q packagecommand. It will return a result as follows: package-version-release.Note the words in bold italics above — username, , file-system, package, version and release. Each word is a placeholder, either for text you enter when issuing a command or for text displayed by the system.Aside from standard usage for presenting the title of a work, italics denotes the first use of a new and important term. For example:Publican is a DocBook publishing system.1.2. Pull-quote ConventionsTerminal output and source code listings are set off visually from the surrounding text.Output sent to a terminal is set in mono-spaced romanand presented thus:Source-code listings are also set in mono-spaced romanbut add syntax highlighting as follows:Notes and Warningsvii1.3. Notes and WarningsFinally, we use three visual styles to draw attention to information that might otherwise be overlooked.2. Getting Help and Giving Feedback2.1. Do You Need Help?If you experience difficulty with a procedure described in this documentation, visit the Red Hat Customer Portal at . Through the customer portal, you can:•search or browse through a knowledgebase of technical support articles about Red Hat products.•submit a support case to Red Hat Global Support Services (GSS).Preface viii•access other product documentation.Red Hat also hosts a large number of electronic mailing lists for discussion of Red Hat software and technology. You can find a list of publicly available mailing lists at https:///mailman/listinfo . Click on the name of any mailing list to subscribe to that list or to access the list archives.2.2. We Need Feedback!If you find a typographical error in this manual, or if you have thought of a way to make this manual better, we would love to hear from you! Please submit a report in Bugzilla: /against the product Red Hat Enterprise Linux 6.When submitting a bug report, be sure to mention the manual's identifier: doc-Performance_Tuning_GuideIf you have a suggestion for improving the documentation, try to be as specific as possible when describing it. If you have found an error, please include the section number and some of the surrounding text so we can find it easily.Chapter 1.1OverviewThe Performance Tuning Guide is a comprehensive reference on the configuration and optimization of Red Hat Enterprise Linux. While this release also contains information on Red Hat Enterprise Linux 5performance capabilities, all instructions supplied herein are specific to Red Hat Enterprise Linux 6.This book is divided into chapters discussing specific subsystems in Red Hat Enterprise Linux. The Performance Tuning Guide focuses on three major themes per subsystem:FeaturesEach subsystem chapter describes performance features unique to (or implemented differently) in Red Hat Enterprise Linux 6. These chapters also discuss Red Hat Enterprise Linux 6 updates that significantly improved the performance of specific subsystems over Red Hat Enterprise Linux 5.AnalysisThe book also enumerates performance indicators for each specific subsystem. Typical values for these indicators are described in the context of specific services, helping you understand their significance in real-world, production systems.In addition, the Performance Tuning Guide also shows different ways of retrieving performance data (i.e. profiling) for a subsystem. Note that some of the profiling tools showcased here are documented elsewhere with more detail.ConfigurationPerhaps the most important information in this book are instructions on how to adjust theperformance of a specific subsystem in Red Hat Enterprise Linux 6. The Performance Tuning Guide explains how to fine-tune a Red Hat Enterprise Linux 6 subsystem for specific services.Keep in mind that tweaking a specific subsystem's performance may affect the performance ofanother, sometimes adversely. The default configuration of Red Hat Enterprise Linux 6 is optimal for most services running under moderate loads.The procedures enumerated in the Performance Tuning Guide were tested extensively by Red Hat engineers in both lab and field. However, Red Hat recommends that you properly test all planned configurations in a secure testing environment before applying it to your production servers. You should also back up all data and configuration information before you start tuning your system.1.1. AudienceThis book is suitable for two types of readers:System/Business AnalystThis book enumerates and explains Red Hat Enterprise Linux 6 performance features at a high level, providing enough information on how subsystems perform for specific workloads (both by default and when optimized). The level of detail used in describing Red Hat Enterprise Linux 6performance features helps potential customers and sales engineers understand the suitability of this platform in providing resource-intensive services at an acceptable level.The Performance Tuning Guide also provides links to more detailed documentation on each feature whenever possible. At that detail level, readers can understand these performancefeatures enough to form a high-level strategy in deploying and optimizing Red Hat Enterprise Linux 6. This allows readers to both develop and evaluate infrastructure proposals.This feature-focused level of documentation is suitable for readers with a high-level understanding of Linux subsystems and enterprise-level networks.Chapter 1. Overview 2System Administrator The procedures enumerated in this book are suitable for system administrators with RHCE1skill level (or its equivalent, that is, 3-5 years experience in deploying and managing Linux). The Performance Tuning Guide aims to provide as much detail as possible about the effects of each configuration; this means describing any performance trade-offs that may occur.The underlying skill in performance tuning lies not in knowing how to analyze and tune asubsystem. Rather, a system administrator adept at performance tuning knows how to balance and optimize a Red Hat Enterprise Linux 6 system for a specific purpose . This means alsoknowing which trade-offs and performance penalties are acceptable when attempting to implement a configuration designed to boost a specific subsystem's performance.1.2. Horizontal ScalabilityRed Hat's efforts in improving the performance of Red Hat Enterprise Linux 6 focus on scalability .Performance-boosting features are evaluated primarily based on how they affect the platform'sperformance in different areas of the workload spectrum — that is, from the lonely web server to the server farm mainframe.Focusing on scalability allows Red Hat Enterprise Linux to maintain its versatility for different types of workloads and purposes. At the same time, this means that as your business grows and your workload scales up, re-configuring your server environment is less prohibitive (in terms of cost and man-hours) and more intuitive.Red Hat makes improvements to Red Hat Enterprise Linux for both horizontal scalability and vertical scalability ; however, horizontal scalability is the more generally applicable use case. The idea behind horizontal scalability is to use multiple standard computers to distribute heavy workloads in order to improve performance and reliability.In a typical server farm, these standard computers come in the form of 1U rack-mounted servers and blade servers. Each standard computer may be as small as a simple two-socket system, although some server farms use large systems with more sockets. Some enterprise-grade networks mix large and small systems; in such cases, the large systems are high performance servers (for example,database servers) and the small ones are dedicated application servers (for example, web or mail servers).This type of scalability simplifies the growth of your IT infrastructure: a medium-sized business with an appropriate load might only need two pizza box servers to suit all their needs. As the business hires more people, expands its operations, increases its sales volumes and so forth, its IT requirements increase in both volume and complexity. Horizontal scalability allows IT to simply deploy additional machines with (mostly) identical configurations as their predecessors.To summarize, horizontal scalability adds a layer of abstraction that simplifies system hardwareadministration. By developing the Red Hat Enterprise Linux platform to scale horizontally, increasing the capacity and performance of IT services can be as simple as adding new, easily configured machines.1.2.1. Parallel ComputingUsers benefit from Red Hat Enterprise Linux's horizontal scalability not just because it simplifies system hardware administration; but also because horizontal scalability is a suitable development philosophy given the current trends in hardware advancement.1 Red Hat Certified Engineer. For more information, refer to /certification/rhce/.Distributed Systems Consider this: most complex enterprise applications have thousands of tasks that must be performed simultaneously, with different coordination methods between tasks. While early computers had a single-core processor to juggle all these tasks, virtually all processors available today have multiple cores. Effectively, modern computers put multiple cores in a single socket, making even single-socket desktops or laptops multi-processor systems.As of 2010, standard Intel and AMD processors were available with two to sixteen cores. Such processors are prevalent in pizza box or blade servers, which can now contain as many as 40 cores. These low-cost, high-performance systems bring large system capabilities and characteristics into the mainstream.To achieve the best performance and utilization of a system, each core must be kept busy. This means that 32 separate tasks must be running to take advantage of a 32-core blade server. If a blade chassis contains ten of these 32-core blades, then the entire setup can process a minimum of 320 tasks simultaneously. If these tasks are part of a single job, they must be coordinated.Red Hat Enterprise Linux was developed to adapt well to hardware development trends andensure that businesses can fully benefit from them. Section 1.3, “Distributed Systems” explores the technologies that enable Red Hat Enterprise Linux's horizontal scalability in greater detail.1.3. Distributed SystemsTo fully realize horizontal scalability, Red Hat Enterprise Linux uses many components of distributed computing. The technologies that make up distributed computing are divided into three layers:CommunicationHorizontal scalability requires many tasks to be performed simultaneously (in parallel). As such, these tasks must have interprocess communication to coordinate their work. Further, a platform with horizontal scalability should be able to share tasks across multiple systems.StorageStorage via local disks is not sufficient in addressing the requirements of horizontal scalability.Some form of distributed or shared storage is needed, one with a layer of abstraction that allows a single storage volume's capacity to grow seamlessly with the addition of new storage hardware. ManagementThe most important duty in distributed computing is the management layer. This management layer coordinates all software and hardware components, efficiently managing communication, storage, and the usage of shared resources.The following sections describe the technologies within each layer in more detail.1.3.1. CommunicationThe communication layer ensures the transport of data, and is composed of two parts:•Hardware•SoftwareThe simplest (and fastest) way for multiple systems to communicate is through shared memory. This entails the usage of familiar memory read/write operations; shared memory has the high bandwidth, low latency, and low overhead of ordinary memory read/write operations.Chapter 1. OverviewEthernetThe most common way of communicating between computers is over Ethernet. Today, Gigabit Ethernet (GbE) is provided by default on systems, and most servers include 2-4 ports of Gigabit Ethernet. GbE provides good bandwidth and latency. This is the foundation of most distributed systems in use today. Even when systems include faster network hardware, it is still common to use GbE for a dedicated management interface.10GbETen Gigabit Ethernet (10GbE) is rapidly growing in acceptance for high end and even mid-range servers. 10GbE provides ten times the bandwidth of GbE. One of its major advantages is with modern multi-core processors, where it restores the balance between communication and computing. You can compare a single core system using GbE to an eight core system using 10GbE. Used in this way, 10GbE is especially valuable for maintaining overall system performance and avoiding communication bottlenecks.Unfortunately, 10GbE is expensive. While the cost of 10GbE NICs has come down, the price of interconnect (especially fibre optics) remains high, and 10GbE network switches are extremely expensive. We can expect these prices to decline over time, but 10GbE today is most heavily used in server room backbones and performance-critical applications.InfinibandInfiniband offers even higher performance than 10GbE. In addition to TCP/IP and UDP network connections used with Ethernet, Infiniband also supports shared memory communication. This allows Infiniband to work between systems via remote direct memory access (RDMA).The use of RDMA allows Infiniband to move data directly between systems without the overhead of TCP/IP or socket connections. In turn, this reduces latency, which is critical to some applications. Infiniband is most commonly used in High Performance Technical Computing (HPTC) applications which require high bandwidth, low latency and low overhead. Many supercomputing applications benefit from this, to the point that the best way to improve performance is by investing in Infiniband rather than faster processors or more memory.RoCCERDMA over Ethernet (RoCCE) implements Infiniband-style communications (including RDMA) overa 10GbE infrastructure. Given the cost improvements associated with the growing volume of 10GbE products, it is reasonable to expect wider usage of RDMA and RoCCE in a wide range of systems and applications.Each of these communication methods is fully-supported by Red Hat for use with Red Hat Enterprise Linux 6.1.3.2. StorageAn environment that uses distributed computing uses multiple instances of shared storage. This can mean one of two things:•Multiple systems storing data in a single location• A storage unit (e.g. a volume) composed of multiple storage appliancesThe most familiar example of storage is the local disk drive mounted on a system. This is appropriate for IT operations where all applications are hosted on one host, or even a small number of hosts.Storage However, as the infrastructure scales to dozens or even hundreds of systems, managing as many local storage disks becomes difficult and complicated.Distributed storage adds a layer to ease and automate storage hardware administration as the business scales. Having multiple systems share a handful of storage instances reduces the number of devices the administrator needs to manage.Consolidating the storage capabilities of multiple storage appliances into one volume helps both users and administrators. This type of distributed storage provides a layer of abstraction to storage pools: users see a single unit of storage, which an administrator can easily grow by adding more hardware. Some technologies that enable distributed storage also provide added benefits, such as failover and multipathing.NFSNetwork File System (NFS) allows multiple servers or users to mount and use the same instance of remote storage via TCP or UDP. NFS is commonly used to hold data shared by multiple applications. It is also convenient for bulk storage of large amounts of data.SANStorage Area Networks (SANs) use either Fibre Channel or iSCSI protocol to provide remote access to storage. Fibre Channel infrastructure (such as Fibre Channel host bus adapters, switches, and storage arrays) combines high performance, high bandwidth, and massive storage. SANs separate storage from processing, providing considerable flexibility in system design.The other major advantage of SANs is that they provide a management environment for performing major storage hardware administrative tasks. These tasks include:•Controlling access to storage•Managing large amounts of data•Provisioning systems•Backing up and replicating data•Taking snapshots•Supporting system failover•Ensuring data integrity•Migrating dataGFS2The Red Hat Global File System 2 (GFS2) file system provides several specialized capabilities. The basic function of GFS2 is to provide a single file system, including concurrent read/write access, shared across multiple members of a cluster. This means that each member of the cluster sees exactly the same data "on disk" in the GFS2 filesystem.GFS2 allows all systems to have concurrent access to the "disk". To maintain data integrity, GFS2 uses a Distributed Lock Manager (DLM), which only allows one system to write to a specific location at a time.GFS2 is especially well-suited for failover applications that require high availability in storage.Chapter 1. OverviewFor more information about GFS2, refer to the Global File System 2 Guide4.For more information about storage in general, refer to the Storage Administration Guide5.1.3.3. Converged NetworksCommunication over the network is normally done through Ethernet, with storage traffic using a dedicated Fibre Channel SAN environment. It is common to have a dedicated network or serial link for system management, and perhaps even heartbeat6. As a result, a single server is typically on multiple networks.Providing multiple connections on each server is expensive, bulky, and complex to manage. This gave rise to the need for a way to consolidate all connections into one. Fibre Channel over Ethernet (FCoE) and Internet SCSI (iSCSI) address this need.FCoEWith FCoE, standard fibre channel commands and data packets are transported over a 10GbE physical infrastructure via a single converged network card (CNA). Standard TCP/IP ethernet traffic and fibre channel storage operations can be transported via the same link. FCoE uses one physical network interface card (and one cable) for multiple logical network/storage connections.FCoE offers the following advantages:Reduced number of connectionsFCoE reduces the number of network connections to a server by half. You can still choose to have multiple connections for performance or availability; however, a single connection provides both storage and network connectivity. This is especially helpful for pizza box servers and blade servers, since they both have very limited space for components.Lower costReduced number of connections immediately means reduced number of cables, switches, and other networking equipment. Ethernet's history also features great economies of scale; the cost of networks drops dramatically as the number of devices in the market goes from millions to billions, as was seen in the decline in the price of 100Mb Ethernet and gigabit Ethernet devices.Similarly, 10GbE will also become cheaper as more businesses adapt to its use. Also, as CNA hardware is integrated into a single chip, widespread use will also increase its volume in themarket, which will result in a significant price drop over time.iSCSIInternet SCSI (iSCSI) is another type of converged network protocol; it is an alternative to FCoE. Like fibre channel, iSCSI provides block-level storage over a network. However, iSCSI does not provide a complete management environment. The main advantage of iSCSI over FCoE is that iSCSI provides much of the capability and flexibility of fibre channel, but at a lower cost.4 /docs/en-US/Red_Hat_Enterprise_Linux/6/html-single/Global_File_System_2/index.html5 /docs/en-US/Red_Hat_Enterprise_Linux/6/html-single/Storage_Administration_Guide/index.html6Heartbeat is the exchange of messages between systems to ensure that each system is still functioning. If a system "loses heartbeat" it is assumed to have failed and is shut down, with another system taking over for it.。
unrecognized potential number 6 in getpot
unrecognized potential number 6 ingetpotGetopt is a standard C library used for parsing command line arguments in Unix-like systems. It is a powerful tool that makes writing command-line interfaces easier and more user-friendly. However, there is a potential pitfall in Getopt that users need to be aware of - the "unrecognized potential number 6 in Getopt" error.Step 1: What is Getopt?The Getopt library is a C library that is used to parse command line arguments. It allows developers to define options and arguments that are expected to be passed to a program when it is run. This makes it easier for users to interact with the program and provides a more user-friendly interface.Step 2: Understanding the "unrecognized potential number 6" errorThe "unrecognized potential number 6 in Getopt" error is an error message that can appear when using the Getopt library. It usually occurs when there is a problem with the options or arguments that have been passed to the program.This error message is typically caused by a mistake or typo in the command line arguments that have been passed to the program. For example, if a user types in an incorrect command line option, such as '-z' instead of '-a', the "unrecognized potential number 6 in Getopt" error message may appear.Step 3: How to fix the "unrecognized potential number 6" errorTo fix the "unrecognized potential number 6 in Getopt" error, users need to carefully review their command line arguments and check for any typos or mistakes. Sometimes, the error message may give a hint as to what the problem is, such as saying that an option is not valid, or that an argument is missing.In some cases, the error may be caused by a bug in the program or a problem with the Getopt library. In this case, users should consult the documentation or seek help from a community forum or mailing list to identify the issue andfind a solution.Step 4: Best practices for avoiding the "unrecognized potential number 6" errorTo avoid the "unrecognized potential number 6 in Getopt" error, users should follow some best practices for working with the Getopt library:1. Define all options and arguments clearly, and document them well in the program's documentation.2. Use descriptive names for options and arguments to make them easy to understand.3. Use default values for optional arguments to avoid ambiguity and confusion.4. Check for errors and handle them gracefully, providing clear error messages to the user when errors occur.5. Test the program thoroughly with various input scenarios to identify and fix any issues before releasing it to the public.ConclusionThe Getopt library is a powerful tool that makes writingcommand-line interfaces easier and more user-friendly. However, users need to be aware of the potential pitfalls, such as the "unrecognized potential number 6 in Getopt" error. By following best practices for working with Getopt, userscan avoid this error and create robust, user-friendly command-line programs.。
cron experssion must consist of 6 -回复

cron experssion must consist of 6 -回复Cron Expression Must Consist of 6 Fields: An In-Depth ExplanationWhen it comes to scheduling tasks, the cron expression is an essential component in Linux and Unix-like operating systems. A cron expression consists of 6 fields that work together to define the time and frequency of a recurring task. These fields are minute, hour, day of the month, month, day of the week, and the command to be executed. In this article, we will delve deeper into each field and explain how they come together to form a comprehensive cron expression.The first field of a cron expression is the minute field. It defines the specific time within an hour when the task should be executed. It can range from 0 to 59, allowing for precise minute-level scheduling. For example, a cron expression of "*/5 * * * * command" would execute the command every 5 minutes, starting at the top of the hour.Moving on to the second field, we have the hour field. It determines the hour of the day when the task should be executed. It ranges from 0 to 23, following the 24-hour format. Using thesame example as before, if we modify the cron expression to "0 */3 * * * command," the command would be executed every 3 hours, at the top of the hour.The third field represents the day of the month. It allows you to specify a particular day within a month for the task to run. It can range from 1 to 31, depending on the month and year. To illustrate this, let's consider the cron expression "0 0 1 * * command." In this case, the command would execute at midnight on the first day of every month.The fourth field is for the month. It determines the specific month when the task should be executed. It can be expressed as either a numeric value (1-12) or as three-letter abbreviations (e.g., Jan, Feb, Mar). For example, the cron expression "0 0 1 1,6,12 * command" would run the command on the first day of January, June, and December.Next, we have the fifth field—the day of the week. It allows you to define which day or days in a week the task should be scheduled. It can be represented as a numeric value (0-7, where both 0 and 7 represent Sunday) or with three-letter abbreviations (e.g., Sun, Mon,Tue). For instance, if we modify the cron expression to "0 0 * * 1,5 command," the command would execute at midnight every Monday and Friday.Finally, we have the sixth field—the command to be executed. It represents the actual task or script that will run as per the schedule defined by the previous fields. This can be any valid Linux command or a path to a script or program. The command field is separated from the other fields by a space or tab character.To summarize, a cron expression relies on the minute, hour, day of the month, month, day of the week, and command fields to schedule recurring tasks in Linux and Unix-like operating systems. Each field has a defined range of values and works together to create a precise schedule for task execution.Understanding and effectively using cron expressions can optimize task management, automate repetitive tasks, and streamline operations in a wide range of scenarios. Whether you are a system administrator, developer, or simply a Linux enthusiast, mastering the art of cron expressions can empower you to efficiently manageyour systems and focus on other critical aspects of your work.。
hott s066 user 说明书

S066 User ManualWarning:This device is recommended to use in house. Don’t use this device in high temperature and poisonous environment. Don’t put this device into water to avoid damage. Inserted battery, and don’t put the device close to fire to avoid exploding. Don’t repair and change the device yourself avoid losing warranty. Don’t use for long time, especially in high volume, which will hurt your ear.Important safety notice1. Please read the User Guide.2. Please save the User Guide3. Please pay attention to the Warning4. Please use the device according to the User Guide5. Don’t use this device exceed the function definition.SpecificationSupport Bluetooth call, FM, time display.ode/Device name: HOTTBluetooth Version: BT5.0Range: 10m (Free space)Output power: 3WFrequency: 20Hz~20kHzSNR: ≥80dBBattery capacity: 3.7B 1000mAPlay time: >10H (Default volume)Charging time: 3~4hInserted MICIPX4 waterproofMicro USB interface Charging IN: DC 5V Packaging;Bluetooth kitMicro USB cable User GuideProduct DiagraMain function1. Press power key for 3s to power on or off.2. Short press can play/ pause. Disconnect Bluetooth in BT mode.3. Volume up/ Next4. Volume down/ Previous5. Answer/Reject/Dial call6. Screen display user interface7. Charging with USB cable, connect to DC 5V or PC.8. Blue LED on when working, Red LED on when charging.9. FM/M mode change, BT FM Time10.MIC wholeCharging can reset the device if work abnormally.Product operationA. Running stationPress the power button for 3 seconds, hear the warning tone, the blue led will flash, and it will be on if connected successfully.B. Power offPress the power button for 3 seconds, after hearing the warning tone, the device will power off.C. Bluetooth pairingIf not connected before, you need connect your loudspeaker box with the Bluetooth device according the program below.1. Power on, after hearing the wa rning tone, the box will be in pairing mode, and the blue led will flash.2. Activate your Bluetooth device, and search.3. Select the box name, which was searched by your Bluetooth device.Notice: If the box is being connected with other device, you need disconnect, and search again.4. The password is “0000” if need, and choose “OK”. The password would be different between different manufactures.5. If paired successfully, the blue led will be on all the time. Now,you can use your box to play music and call. When playing the music, the blue led will breath slow. When pause the music, the blue led will flash several seconds, the be on all the time. Notice:If connected with the box before, you need connect according to the instruction below.Activate Bluetooth function in your device, the loudspeaker box will connect with your device automatically and can hear the warning tone.Play music after Bluetooth connectingShort press to play and pause if playing.Long press to play next, and short press to volume up.Long press to play previous, and short press to volume down.Hands free call modeIf connected, you can press to answer the call, and press to hang up when talking. At the same time, music will stop automatically.Charging for the loudspeaker boxBattery inside, can connect the USB cable to PC to charge the box, or connect the USB cable to DC 5V adaptor. When charging, the red led will be on. If charging finished, the red led will be off. Please remove the cable.The working time will depend on the volume level, the higher volume, the shorter time. You need re-charge the box if you didn’t use it for a long time. It’s recommended to charge the box once per month, so that can protect the battery better, and the battery will work for longer time.FM modeLong press into FM scan mode, and save automatically.Short press can play the channel saved.Long press to change the channel saved, long press to delete the channel.Long press/to modify frequency, short press can change volume.Time modePress change key into time mode, long press and type12h/24h system, press /to change.Short press to M/S mode and short press/to set time.Absorbed function when having a bathWhen having a bath, can listen to the music and answer the call, as the product can absorb the wall with the pedestal.Notice:Don’t dip the product into water, which will damage the product.CapacityBluetooth version: BT5.0, support profile: A2DP /HFP/AVRCPThis device complies with Part 15 of the FCC Rules.Operation is subject to the following two conditions:(1) this device may not cause harmful interference, and(2) this device must accept any interference received,including interference that may cause undesired operation.Any changes or modifications not expressly approved by the party responsible for compliance could void the user's authority to operate the equipment.FCC ID: YB2-S602Question and instructionIf find some problem when using this product, you can solve according to the solution below.Trouble Trouble shooting SolutionCharge failure USB power charger (notincluded in this package) is not inserted into thewall socket or USBcable (included in thepackage) is not insertedinto the 2.0mm interfaceon the side of thespeakerInsert the chargerinto the wall socket orUSB cable into the2.0mm interface onthe side of thespeakerThe wall socket doesn'twork.Insert the device intoanother wall socket tomake sure theplayback failsThe USB port of thecomputer doesn't work.Make sure yourcomputer is turned onand try another USBport.There is no sound The battery in thespeaker is deadRechargePhone not connected.Read the "speakeractions" section toconnect speakers Volume is too low.Volume up yourproductCan’t connect with theproduct. Can’t pairCheck your Bluetoothdevice if supportA2DP profileSound source offOpen the soundsource/The Bluetooth is offOpen the Bluetooth inyour device Bluetooth isincompatibleUse different playdevicePoor quality/ interrupt The device exceeds therange10m in free space.Notice, all the information above only for your reference.S066中文参考说明书警告此设备只限于室内使用。
BA688CF-P PROFIBUS PA字段总线显示器说明书

The BA688CF-P Fieldbus Display is a general purpose instrument that can display up to eight fieldbus process variables. Eleven selectable standard screen formats contain one, two, three, four or eight variables, with units of measurement, tag descriptions and bargraphs on some screens. Powered by the fieldbus the BA688CF-P only requires a 2-wire connection, no additional power supply is required. The high contrast 86 x 45mm liquid crystal display incorporates a green backlight that is also powered from the fieldbus enabling the display to be read in all lighting conditions from full sunlight to total darkness.Simple commissioning results from the use of standard display formats. Apart from loading the BA688CF-P configuration files onto the system host and selecting the fieldbus variables to be displayed, no programming is required. Configuration of the BA688CF-P Fieldbus Display is performed via the fieldbus and the instrument front panel push buttons; simple menus enable the required standard display format to be selected and the units of measurement and tag information for each variable to be entered.Six optional local alarm outputs may be linked to any of the displayed variables. Each isolated single pole solid state output may be conditioned as a combined high and low alarm, or as just a high or low alarm. Each output can switch any low power load such as a sounder, lamp or solenoid valve. Alarm configuration and the alarm set point adjustment is performed via the BA688CF-P front panel push buttons, as the local alarms are not accessible from the fieldbus system host.BA688CF-P applications vary from a simple single variable display using a standard format, to providing an operator interface with a custom display and control inputs via external buttons.The six push buttons on the front of the instrument may be used for returning operator acknowledgments or controls to the fieldbus host. If larger industrial switches are required for these operator controls, up to six external push buttons may be connected to the BA688CF-P. When the external switches are activated, the front panel push buttons may be disabled or operated in parallel with the external switches. Comprehensive documentation includes a PROFIBUS Interface Guide. For field mounting applications see the BA684DF-P datasheet. This instrument has a similar electrical specification but is housed in a robust IP66 GRP enclosure suitable for external mounting.If flammable atmospheres are present, the intrinsically safe BA488CF-P fieldbus display should be used.For FOUNDATION™ fieldbus systems, please see the datasheet for the equivalent BA688CF-F fieldbus display.HostPowerSupply &SegmentCoupler12 Fieldbus06。
UMAT符号说明
******************************************************************** inp ********************************************************* *MATERIAL, NAME= <用户自定义材料的名称>*USER MATERIAL, CONSTANTS= 8<需输入的变量个数>,(UNSYMN)30.E6, 0.3, 30.E3, 0., 40.E3, 0.1, 50.E3, 0.5 <依次给出需输入的变量的值>*DEPVAR13 <定义求解过程中的状态变量(SDVs)需要的存储空间,即状态变量个数,=NSTATV>*INITIAL CONDITIONS, TYPE=SOLUTION<依次给出状态变量的值,也可不写>*USER SUBROUTINES,(INPUT=<UMAT的Fortran程序名>)******************************************************************** Fortran程序 ************************************************ SUBROUTINE UMAT(STRESS,STATEV,DDSDDE,SSE,SPD,SCD,1 RPL,DDSDDT,DRPLDE,DRPLDT,2 STRAN,DSTRAN,TIME,DTIME,TEMP,DTEMP,PREDEF,DPRED,CMNAME,3 NDI,NSHR,NTENS,NSTATV,PROPS,NPROPS,COORDS,DROT,PNEWDT,4 CELENT,DFGRD0,DFGRD1,NOEL,NPT,LAYER,KSPT,KSTEP,KINC)CINCLUDE 'ABA_PARAM.INC'CCHARACTER*80 CMNAMEDIMENSION STRESS(NTENS),STATEV(NSTATV),1 DDSDDE(NTENS,NTENS),DDSDDT(NTENS),DRPLDE(NTENS),2 STRAN(NTENS),DSTRAN(NTENS),TIME(2),PREDEF(1),DPRED(1),3 PROPS(NPROPS),COORDS(3),DROT(3,3),DFGRD0(3,3),DFGRD1(3,3)user coding to define DDSDDE, STRESS, STATEV, SSE, SPD, SCDand, if necessary, RPL, DDSDDT, DRPLDE, DRPLDT, PNEWDTRETURNEND变量分类UMAT中可以得到的量增量步开始时刻的,应力(Stress),应变(Strain), 状态变量(Solution-dependent state variables (SDVs))增量步开始时刻的,应变增量(Strain increment),转角增量(Rotation increment),变形梯度(Deformation gradient)时间总值及增量(Total and incremental values of time),温度(Temperature),用户定义场变量材料常数,材料点的位置,特征单元长度当前分析步,增量步必须定义的变量应力,状态变量,材料Jacobian矩阵(本构关系)可以定义的变量应变能,塑性耗能,蠕变耗能新建议的时间增量UMAT中可以直接调用(Call ……)的子程序或子函数SINV(STRESS,SINV1,SINV2,NDI,NSHR)——用于计算应力不变量。
UMAT子程序详解
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Lars Schmidt-Thieme, Information Systems and Machine Learning Lab (ISMLL), University of Hildesheim, Germany 3 / 25
Modern Optimization Techniques
1. Subgradients
Tangent as a global underestimator
f (x) h(y) = f (x) + ∇f (x)T (y − x)
x
x
Lars Schmidt-Thieme, Information Systems and Machine Learning Lab (ISMLL), University of Hildesheim, Germany 4 / 25
Modern Optimization Techniques
1. Subgradients
Tangent as a global underestimator
f (x)
x
x
Lars Schmidt-Thieme, Information Systems and Machine Learning Lab (ISMLL), University of Hildesheim, Germany 4 / 25
Modern Optimization Techniques
1. Subgradients
Subgradient
Given a function f and a point x ∈ dom f , g ∈ Rn is called a subgradient of f at x if: the hypersurface with slopes g through (x, f (x)) is a global underestimator of f , i.e. f (y) ≥ f (x) + gT (y − x), for all y ∈ dom f
Modern Optimization Techniques
1. Subgradients
Tangent as a global underestimator
f (x) h(y) = f (x) + ∇f (x)T (y − x)
x
x
What happens if f is not differentiable?
Lars Schmidt-Thieme, Information Systems and Machine Learning Lab (ISMLL), University of Hildesheim, Germany 2 / 25
Modern Optimization Techniques
1. Subgradients
original slides by Lucas Rego Drumond (ISMLL)
Lars Schmidt-Thieme, Information Systems and Machine Learning Lab (ISMLL), University of Hildesheim, Germany 1 / 25
Modern Optimization Techniques
1. Subgradients
Motivation
If a function is once differentiable we can optimize it using
Gradient Descent, Stochastic Gradient Descent, Quasi-Newton Methods
1. Subgradients
Subgradient
Given a function f and a point x ∈ dom f , g ∈ Rn is called a subgradient of f at x if: the hypersurface with slopes g through (x, f (x)) is a global underestimator of f , i.e. f (y) ≥ f (x) + gT (y − x), for all y ∈ dom f
(1st order information) If a function is twice differentiable we can optimize it using
Newton’s method
(2nd order information) What if the objective function is not differentiable?
f (x )
T (x − x (2) ) f (x (2) ) + g2
x (1)
f (x x (2)
(1) )
x T (x − x (1) ) + g1
5 / 25
Lars Schmidt-Thieme, Information Systems and Machine Learning Lab (ISMLL), University of Hildesheim, Germany
Modern Optimization Techniques
1. Subgradients
Subgradient
Given a function f and a point x ∈ dom f , g ∈ Rn is called a subgradient of f at x if: the hypersurface with slopes g through (x, f (x)) is a global underestimator of f , i.e. f (y) ≥ f (x) + gT (y − x), for all y ∈ dom f
Lars Schmidt-Thieme, Information Systems and Machine Learning Lab (ISMLL), University of Hildesheim, Germany 4 / 25
Modern Optimization Techniques
1. Subgradients
1 / 25
Lars Schmidt-Thieme, Information Systems and Machine Learning Lab (ISMLL), University of Hildesheim, Germany
Modern Optimization Techniques
Outline
f (x )
x (1)
x T (x − x (1) ) f (x (1) ) + g1
5 / 25
Lars Schmidt-Thieme, Information Systems and Machine Learning Lab (ISMLL), University of Hildesheim, Germany
Subgradient
Given a function f and a point x ∈ dom f , g ∈ Rn is called a subgradient of f at x if: the hypersurface with slopes g through (x, f (x)) is a global underestimator of f , i.e. f (y) ≥ f (x) + gT (y − x), for all y ∈ dom f
1st-Order Condition for Convexity
1st-order condition: a differentiable function f is convex iff dom f is a convex set and for all x, y ∈ dom f f (y) ≥ f (x) + ∇f (x)T (y − x)
f (x )
T (x − x (2) ) f (x (2) ) + g3 T (x − x (2) ) f (x (2) ) + g2
x (1)
f (x x (2)
(1) )
x T (x − x (1) ) + g1
1. Subgradients
2. Subgradient Method
3. Subgradient Method Examples
Lars Schmidt-Thieme, Information Systems and Machine Learninesheim, Germany 2 / 25
Modern Optimization Techniques
Modern Optimization Techniques
2. Unconstrained Optimization / 2.5. Subgradient Methods
Lars Schmidt-Thieme
Information Systems and Machine Learning Lab (ISMLL) Institute of Computer Science University of Hildesheim, Germany
Modern Optimization Techniques
1. Subgradients
Outline
1. Subgradients
2. Subgradient Method
3. Subgradient Method Examples