搬运机械手及其控制系统设计 下气爪
机械手气动手爪的结构分析与选择
机械⼿⽓动⼿⽖的结构分析与选择机械⼿⽓动⼿⽖的结构分析与选择⽔利部信息研究所 吴淑英在⾃动⽣产线中,各种型式的机械⼿应⽤越来越⼴泛。
现代的机械⼿采⽤各种电⽓、机械、液压、⽓动传动机构,并⽤电⼦系统进⾏控制,以实现模仿⼈的⼿臂和⼿指动作。
⽽其⼿⽖的结构也是各式各样,但以⽓动⼿⽖应⽤较为普遍。
1 ⽓动⼿⽖的优缺点优点:(1)快速性。
⽓动⼿⽖以压缩空⽓驱动,具有⽓压传动的优点,运动速度快,⼿⽖的开闭时间短,⼯作频率可达100~180次 m in。
(2)体积⼩,重量轻。
由于采⽤铝合⾦等轻⾦属,并实现紧凑的设计,⼿⽖机构⼀般重量在300~1500g之间。
(3)采⽤特殊密封结构,不必润滑。
(4)开闭动作均可⽤压缩空⽓驱动,⼯作压⼒可调,把持⼒稳定可靠。
(5)具有内部磁性发讯装置,⼿⽖的开闭动作可以得到确认,提⾼⼯作可靠性。
(6)⼀般⽓动⼿⽖机构都考虑在各个⽅向上可以安装,⽅便⽤户,并备有各种形状的⼿指,适应不同⼯件。
缺点:把持⼒受⼀定限制,当需要较⼤把持⼒时,⼿⽖体积过⼤。
2 ⽓动⼿⽖的分类与结构分析⽓动⼿⽖⽬前已经逐渐成为⼀种标准产品,由专业⽓动元件⼚⽣产并供给⽤户选择。
综合各种⼿⽖结构,按⼿⽖的运动情况分平⾏开闭型⼿⽖;⽀点开闭型⼿⽖;180°转⾓开闭型⼿⽖;三⽖或四⽖定⼼式⼿⽖。
结构分析选例以下⼏种(其中平⾏开闭型⼿⽖有4种)。
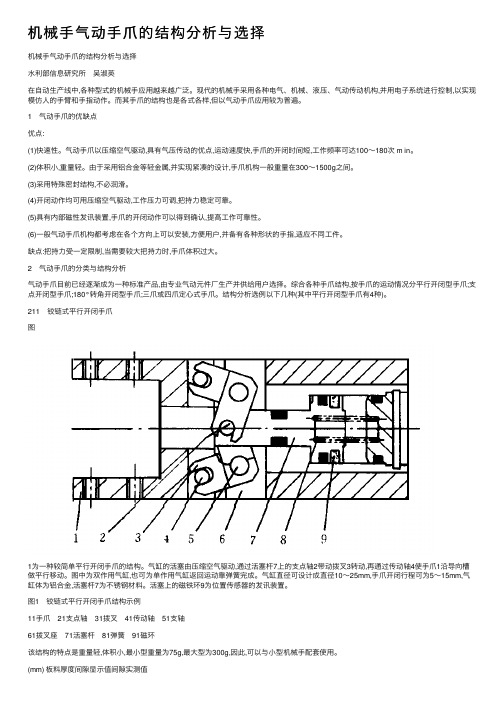
211 铰链式平⾏开闭⼿⽖图1为⼀种较简单平⾏开闭⼿⽖的结构。
⽓缸的活塞由压缩空⽓驱动,通过活塞杆7上的⽀点轴2带动拨叉3转动,再通过传动轴4使⼿⽖1沿导向槽做平⾏移动。
图中为双作⽤⽓缸,也可为单作⽤⽓缸返回运动靠弹簧完成。
⽓缸直径可设计成直径10~25mm,⼿⽖开闭⾏程可为5~15mm,⽓缸体为铝合⾦,活塞杆7为不锈钢材料。
活塞上的磁铁环9为位置传感器的发讯装置。
图1 铰链式平⾏开闭⼿⽖结构⽰例11⼿⽖ 21⽀点轴 31拨叉 41传动轴 51⽀轴 61拨叉座 71活塞杆 81弹簧 91磁环该结构的特点是重量轻,体积⼩,最⼩型重量为75g,最⼤型为300g,因此,可以与⼩型机械⼿配套使⽤。
搬运机械手电气控制系统设计

目录第1章概述 (1)1.1 PLC简介 (1)1.2机械手概述 (1)1.3 机械手控制系统设计步骤 (2)第2章控制方案论证 (3)2.1 搬运机械手的设计原理 (3)2.2 PLC的选取 (4)第3章控制系统硬件电路设计 (7)3.1传送带A,B主电路图及传送带B的控制电路图 (7)3.2PLC控制面板及接口电路图 (8)第4章控制系统软件设计 (10)4.1控制系统的软件设计原理 (10)4.2梯形图 (12)第5章控制系统调试 (14)5.1 控制系统的调试过程 (14)总结 (15)参考文献 (16)附录 (17)第1章概述1.1PLC简介自二十世纪六十年代美国推出可编程逻辑控制器(Programmable Logic Controller,PLC)取代传统继电器控制装置以来,PLC得到了快速发展,在世界各地得到了广泛应用。
同时,PLC的功能也不断完善。
随着计算机技术、信号处理技术、控制技术网络技术的不断发展和用户需求的不断提高,PLC在开关量处理的基础上增加了模拟量处理和运动控制等功能。
今天的PLC 不再局限于逻辑控制,在运动控制、过程控制等领域也发挥着十分重要的作用。
通用PLC应用于专用设备时可以认为它就是一个嵌入式控制器,但PLC相对一般嵌入式控制器而方具有更高的可靠性和更好的稳定性。
实际工作中碰到的一些用户原来采用嵌入式控制器,现在正逐步用通用PLC或定制PLC取代嵌入式控制器。
1.2机械手概述工业机械手是近几十年发展起来的一种高科技自动化生产设备。
工业机械手是工业机器人的一个重要分支。
它的特点是可通过编程来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,尤其体现了人的智能和适应性。
机械手作业的准确性和各种环境中完成作业的能力,在国民经济各领域有着广阔的发展前景。
机械手技术涉及到力学、机械学、电气液压技术、自动控制技术、传感器技术和计算机技术等科学领域,是一门跨学科综合技术。
搬运机械手运动控制系统设计范本

搬运机械手运动控制系统设计搬运机械手运动控制系统设计第一部分:题目设计要求。
一、搬运机械手功能示意图二、基本要求与参数本作业要求完成一种二指机械手的运动控制系统设计。
该机械手采用二指夹持结构,如图1所示,机械手实现对工件的夹持、搬运、放置等操作。
以夹持圆柱体为例,要求设计运动控制系统及控制流程。
机械手经过升降、左右回转、前后伸缩、夹紧及松开等动作完成工件从位置A 到B 的搬运工作,具体操作顺序:逆时针回转(机械手的初始位置在A 与B 之间)—>下降—>夹紧—>上升—>顺时针回转—>下降—>松开—>上升,机械手的工作臂都设有限位开关SQ i 。
A B 工SQ 1 SQ 2 SQ 3SQ 4SQ 5SQ 6夹松设计参数:(1)抓重:10Kg(2)最大工作半径:1500mm(3)运动参数:伸缩行程:0-1200mm;伸缩速度:80mm/s;升降行程:0-500mm;升降速度:50mm/s回转范围:0-1800控制器要求:(1)在PLC、单片机、PC微机或者DSP中任选其一;(2)具备回原点、手动单步操作及自动连续操作等基本功能。
三、工作量(1)驱动及传动方案的设计及部件的选择;(2)二指夹持机构的设计及计算;(3)总体控制方案及控制流程的设计;(4)设计说明书一份。
四、设计内容及说明(1)机械手工作臂及机身驱动部件的选择及设计,需设计出具体的驱动及传动方案,画出方案原理框图。
(2)末端夹持机构设计,该结构需保证抓取精度高,重复定位精度和运动稳定性好,并有足够的抓取能力。
设计应包括确定夹持方案、计算夹持范围、计算夹紧力及驱动力,完成夹持机构设计图。
(3)控制系统设计,包括确定控制方案、核心功能部件的选择、主要功能模块的实现原理、绘制控制流程框图。
第二部分:设计过程搬运机械手运动控制系统设计一机械手工作臂及机身驱动部件的选择及设计,需设计出具体的驱动及传动方案,画出方案原理框图。
机械毕业设计363搬运机械手及其控制系统设计
目录摘要 (I)ABSTRACT(英文摘要) (Ⅱ)目录 (IV)第一章引言 (1)1.1课题的背景和意义 (1)1.2课题国内外发展现状 (2)第二章总体方案确定 (4)2.1总体方案论证 (4)2.1.1 机械手手臂结构方案设计 (4)2.1.2 机械手驱动方案设计 (4)2.1.3 机械手控制方案设计 (5)2.1.4 机械手主要参数 (5)2.1.5 机械手的技术参数列表 (6)第三章机械手总体结构设计 (7)3.1动作工况与分析 (7)3.2机械手各部分结构设计 (8)3.2.1 机械手底座的设计 (8)3.2.2 立柱结构的设计 (8)3.2.3 轴承的选择 (9)3.2.4 上轴承座的选择 (10)3.2.5 下轴承座的选择 (11)3.2.6 大臂的结构设计 (12)3.2.7 小臂的结构设计 (12)3.2.8 气爪的结构设计 (12)3.2.9 手部夹紧气缸设计计算 (14)3.2.10 升降气缸设计计算 (18)- IV -3.2.11 伸缩气缸设计计算 (22)3.2.12 回转气缸设计计算 (25)第四章气动部分设计 (28)第五章PLC控制部分设计 (30)5.1电磁铁动作顺序 (30)5.2I/O分配 (30)5.3PLC控制梯形图 (31)5.4PLC控制程序指令 (32)结论 (37)参考文献 (38)致谢及声明 (39)摘要近20年来,气动技术的应用领域迅速拓宽,尤其是在各种自动化生产线上得到广泛应用。
电气可编程控制技术与气动技术相结合,使整个系统自动化程度更高,控制方式更灵活,性能更加可靠;气动机械手、柔性自动生产线的迅速发展,对气动技术提出了更多更高的要求。
本课题设计源于生产线中的搬运站,传动方式采用气压传动,即用各种气缸来控制机械手的动作,控制部分结合可编程控制技术编写程序进行控制来实现两站之间的搬运。
机械手主要由手部、运动机构和控制系统三大部分组成。
手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。
搬运机械手控制系统设计(含CAD图纸)
毕业论文(设计)任务书论文(设计)题目:搬运机械手控制系统的设计一、主要内容及基本要求在本次搬运机械手控制系统的设计中,要完成的任务有如下几个方面:1、用机器人运动学求得搬运机械手的正解;2、由运动学方程解得搬运机械手各关节变量,并求出轨迹方程;3、用VB建立人机交互界面,并根据轨迹方程画出轨迹曲线;4、实现VB界面与PLC的通信,以及对搬运机械手的控制;5、写一份8000字以上的毕业设计说明书;6、一篇不少于3000单词的英文原文及中文翻译。
二、重点研究的问题1、搬运机械手运动学方程正解的求解;2、建立VB界面,实现计算以及画出轨迹曲线;3、实现搬运机械手的自动控制。
三、应收集的资料及主要参考文献1、刘极峰,易际明.机器人技术基础[M].北京:高等教育出版社,2006年.2、张铁.机器人学[M].广州:华南理工大学出版社,2000年.3、从爽.实用运动控制技术[M].北京:电子工业出版社,2006年.4、钟肇新,范建东.可编程控制器原理及应用[M].广州:华南理工大学出版社,2003年5、俞建家.Visual Basic 6.0程序设计与应用教程[M].福建:厦门大学出版社,2003年6、吕伟臣.Visual Basic 6.0初级编程教程[M].北京:北京大学出版社,2002年.7、大熊.机器人控制[M].北京:科学出版社,2002年.8、张海根.机电传动控制[M].北京:高等教育出版社,2005年.9、丹尼斯.机器人设计与控制[M].北京:科学出版社,2004年.10、刘极峰.计算机辅助设计与制造[M].北京:高等教育出版社,2004年.目录摘要 (1)第1章引言 (2)1. 1课题研究趋势与意义 (2)1.2串联关节机器人的发展和现状 (3)1.3本文的研究内容和主要工作 (4)第2章PLC控制系统及实现 (6)2.1机械手及控制器主要参数 (6)2.2简述机械手动作的实现 (7)2.3控制软件的设计 (7)2.3.1 PLC的选择 (6)2.3.2 光电编码器 (6)2.3.3 接口电路 (7)2.3.4 控制原理及程序 (7)3.1引言 (9)3. 2机械手运动学数学基础 (9)3.2.1机器人位置与姿态的描述[12] (9)3.3空间齐次坐标变换 (12)3.3.1坐标变换 (12)3.3.2齐次坐标变换 (13)3.3 点在空间直角坐标系中绕过原点任意轴的一般旋转变换 (14)3.4 Denavt-Hartenberg(D-H)表示法 (16)3.4.1 坐标系的建立 (16)3.4.2 几何参数定义 (17)3.4.3 建立坐标系和坐标系的齐次变换矩阵 (17)第4章机器人运动学方程的求解 (19)4.1机器人正向运动学 (19)4.2 机器人逆向运动学 (21)第5章机械手轨迹规划 (23)5.1 机器人轨迹的概念 (23)5.2 轨迹的生成方式 (23)5.2.1 轨迹规划涉及的主要问题 (23)5.3 插补方式分类 (24)5.4 机器人轨迹插值计算 (24)5.4.1 三次多项式插值 (25)5.4.2机械手轨迹规划。
搬运机械手及其控制系统设计

搬运机械手及其控制系统设计近20年来,气动技术的应用领域迅速拓宽,尤其是在各种自动化生产线上得到广泛应用。
电气可编程控制技术与气动技术相结合,使整个系统自动化程度更高,控制方式更灵活,性能更加可靠;气动机械手、柔性自动生产线的迅速发展,对气动技术提出了更多更高的要求。
本课题设计源于生产线中的搬运站,传动方式采用气压传动,即用各种气缸来控制机械手的动作,控制部分结合可编程控制技术编写程序进行控制来实现两站之间的搬运。
机械手主要由手部、运动机构和控制系统三大部分组成。
手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。
运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势。
运动机构的升降、伸缩、旋转等独立运动方式,称为机械手的自由度。
本课题中设计的搬运机械手主要有旋转、伸缩、升降、夹紧四个自由度组成。
课题从机械部分、气动部分和控制三部分对气动机械手进行设计,要求机械手实现上下站之间的搬运功能。
机械部分重点是总体结构的设计、各个气缸的选择和安装设计、各零部件的结构设计等,气动部分主要是给出了搬运机械手的气动原理图,而控制部分则主要是程序的设计和调试,论文采用西门子(S7-200)指令编程,给出了相应的梯形图、语句表和简单的流程图。
由于气动机械手有结构简单、易实现无级调速、易实现过载保护、易实现复杂的动作等诸多独特的优点,气动机械手正在向重复高精度,模块化,无给油化,机电气一体化方向发展。
可以预见,在不久的将来,气动机械手将越来越广泛地进人工业、军事、航空、医疗、生活等领域。
- IV -1.1 课题的背景和意义近20年来,气动技术的应用领域迅速拓宽,尤其是在各种自动化生产线上得到广泛应用。
电气可编程控制技术与气动技术相结合,使整个系统自动化程度更高,控制方式更灵活,性能更加可靠;气动机械手、柔性自动生产线的迅速发展,对气动技术提出了更多更高的要求。
搬运机械手PLC控制系统课程设计
中北大学课程设计说明书学生姓名:学号:学院:机械与动力工程学院专业:机械电子工程题目:搬运机械手PLC控制系统设计指导教师:赵俊生职称: 副教授原霞职称:副教授2013年 12月 30日中北大学课程设计任务书2013/2014 学年第一学期学院:机械与动力工程学院专业:机械电子工程学生姓名:学号:课程设计题目:搬运机械手PLC控制系统设计起迄日期:2013年12月30日~2014年1月10日课程设计地点:瑞学楼指导教师:赵俊生原霞负责人:赵俊生下达任务书日期: 2013年 12月30日.设计工作任务及工作量的要求〔包括课程设计计算说明书(论文实物样品等〕:电气控制原理设计(原理图);完成现场器件与PLC内部等效继电器地址编号对照表;目录1 搬运机械手的发展及PLC的选择 (1)2 搬运机械手的总体设计 (2)2.1 设计内容与要求 (2)2.2 控制系统硬件设备配置 (3)2.2.1 电动机控制线路设计 (3)2.2.2 PLC控制系统设计 (3)2.3 控制系统软件设计 (4)2.3.1 机械手功能流程图 (4)2.3.2 梯形图 (5)2.3.3 PLC指令编写程序 (9)3 设计小结 (10)1 搬运机械手的发展及PLC的选择随着现代工业自动化的普及和发展,搬运机械手的应用也逐渐普及,机械手是一种能模拟人的手臂的部分动作,根据给定的规定动作顺序、轨迹来完成工件抓取和搬运的自动化装置。
搬运机械手的应用可以大大提高生产过程中的自动化程度可以更好地节约能源和提高运输设备或产品的效率、降低了劳动力和其他搬运方式的限制和不足以满足现代经济的发展要求。
该控制系一以可编程控制器为核心由两个电磁阀控制的液压钢来实现机械手的上升下降运动及夹紧工件的动作,两个转速不同的电动机分别通过两线圈控制电动机的正反转。
其动作过程包括:下降、夹紧、上升、前进、延时、下降、放松、上升、后退;其操作方式包括:回原位、手动、单步、连续;来满足生产中的各种操作要求。
搬运机械手电气控制系统设计
课程设计课程名称电气控制与PLC课题名称搬运机械手电气控制系统设计专业班级学号姓名指导教师2012年 7月 1日湖南工程学院课程设计任务书课程名称电气控制与PLC课题名称搬运机械手电气控制系统设计专业班级姓名学号指导教师审批任务书下达日期2012年6月25日课程设计完成日期2012年7月6日目录第1章概述 (1)1.1 PLC简介 (1)1.2机械手概述 (1)1.3 机械手控制系统设计步骤 (2)第2章控制方案论证 (3)2.1 搬运机械手的设计原理 (3)2.2 PLC的选取 (4)第3章控制系统硬件电路设计 (7)3.1传送带A,B主电路图及传送带B的控制电路图 (7)3.2PLC控制面板及接口电路图 (8)第4章控制系统软件设计 (10)4.1控制系统的软件设计原理 (10)4.2梯形图 (12)第5章控制系统调试 (14)5.1 控制系统的调试过程 (14)总结 (15)参考文献 (16)附录 (17)第1章概述1.1PLC简介自二十世纪六十年代美国推出可编程逻辑控制器(Programmable Logic Controller,PLC)取代传统继电器控制装置以来,PLC得到了快速发展,在世界各地得到了广泛应用。
同时,PLC的功能也不断完善。
随着计算机技术、信号处理技术、控制技术网络技术的不断发展和用户需求的不断提高,PLC在开关量处理的基础上增加了模拟量处理和运动控制等功能。
今天的PLC 不再局限于逻辑控制,在运动控制、过程控制等领域也发挥着十分重要的作用。
通用PLC应用于专用设备时可以认为它就是一个嵌入式控制器,但PLC相对一般嵌入式控制器而方具有更高的可靠性和更好的稳定性。
实际工作中碰到的一些用户原来采用嵌入式控制器,现在正逐步用通用PLC或定制PLC取代嵌入式控制器。
1.2机械手概述工业机械手是近几十年发展起来的一种高科技自动化生产设备。
工业机械手是工业机器人的一个重要分支。
它的特点是可通过编程来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,尤其体现了人的智能和适应性。
搬运机械手的结构和控制系统设计

机电工程学院机电一体化系统设计课程设计设计题目:专业:学号:姓名:指导老师:毕业论文(设计)任务书一、题目:搬运机械手的结构和控制系统设计二、研究内容与目标:本设计主要的研究内容是1. 用proe绘制搬运机械手三维立体图2. 用proe转配搬运机械手及制作仿真动画并生成仿真视频制作3. 利用PLC实现控制系统设计4. 设计说明书(1份)目标:让搬运机械手能搬运物品,掌握机械手的设计原理和控制过程三、研究方法:通过不断地查找资料,研究工业机械手的作用,并不断分析最后制作出工业上需要的机械手。
四、主要参考文献:(5篇以上)[1]刘明保,吕春红等主编.机械手的组成机构及技术指标的确定.河南高等专科学校学报,[2]李超主编.气动通用上下料机械手的研究与开发.陕西科技大学,[3]陆祥生,杨绣莲主编.机械手.中国铁道出版社,[4]张建民主编.工业机械人.北京:北京理工大学出版社,[5]李允文主编.工业机械手设计.机械工业出版社,1996.[6]蔡自兴主编.机械人学的发展趋势和发展战略.机械人技术,[7]金茂青,曲忠萍,张桂华等主编.国外工业机械人发展的态势分析.机械人技术与应用,[8]王雄耀主编.近代气动机械人(机械手)的发展及应用.液压气动与密封,[9]李明主编.单臂回转机械手设计.制造技术与机床,2004. 64-66[10]张军,封志辉主编.多工步搬运机械手的设计.机械设计,目录搬运机械手的结构和控制系统设计[摘要]用于再现人手功能的技术装置称为机械手。
机械手是模仿着人手的部分动作,按给定程序、轨迹和要求实现自动抓取、搬运或操作的自动机械装置。
在工业生产中应用的机械手被称为工业机械手。
共业机械手是近代自动控制领域中出现的一项新技术,并已成为现代机械制造生产系统中的一个重要组成部分,这种新技术发展很快,逐渐成为一门新兴的学科——机械手工程。
机械手涉及到力学、机械学、电器液压技术、自动控制技术、传感器技术和计算机技术等科学领域,是一门跨学科综合技术。
搬运机械手运动控制系统设计

搬运机械手运动控制系统设计第一部分:题目设计要求。
一、搬运机械手功能示意图二、基本要求与参数本作业要求完成一种二指机械手的运动控制系统设计。
该机械手采用二指夹持结构,如图1所示,机械手实现对工件的夹持、搬运、放置等操作。
以夹持圆柱体为例,要求设计运动控制系统及控制流程。
机械手通过升降、左右回转、前后伸缩、夹紧及松开等动作完成工件从位置A 到B 的搬运工作,具体操作顺序:逆时针回转(机械手的初始位置在A 与B 之间)—>下降—>夹紧—>上升—>顺时针回转—>下降—>松开—>上升,机械手的工作臂都设有限位开关SQ i 。
设计参数:(1)抓重:10Kg(2)最大工作半径:1500mm(3)运动参数:伸缩行程:0-1200mm ; 伸缩速度:80mm/s ; 升降行程:0-500mm ; 升降速度:50mm/s 回转范围:0-1800 控制器要求:(1)在PLC 、单片机、PC 微机或者DSP 中任选其一;工SSS夹松(2)具备回原点、手动单步操作及自动连续操作等基本功能。
三、工作量(1)驱动及传动方案的设计及部件的选择;(2)二指夹持机构的设计及计算;(3)总体控制方案及控制流程的设计;(4)设计说明书一份。
四、设计内容及说明(1)机械手工作臂及机身驱动部件的选择及设计,需设计出具体的驱动及传动方案,画出方案原理框图。
(2)末端夹持机构设计,该结构需保证抓取精度高,重复定位精度和运动稳定性好,并有足够的抓取能力。
设计应包括确定夹持方案、计算夹持范围、计算夹紧力及驱动力,完成夹持机构设计图。
(3)控制系统设计,包括确定控制方案、核心功能部件的选择、主要功能模块的实现原理、绘制控制流程框图。
第二部分:设计过程搬运机械手运动控制系统设计一机械手工作臂及机身驱动部件的选择及设计,需设计出具体的驱动及传动方案,画出方案原理框图。
1 工作台升降,机械手臂张合及伸缩驱动部件选用步进电机,速度容易控制,位置精度高。
基于PLC控制的气动搬运机械手的气动系统设计
摘要机械手是在自动化生产过程中使用的一种具有抓取和移动工件功能的自动化装置。
它是在机械自动化生产过程中发展起来的一种新型装置,在生产过程中起着非常重要的作用。
机械手能代替人类完成危险、重复、枯燥的工作,减轻人类劳动强度,提高劳动生产力,因此机械手得到了越来越广泛的应用。
可编程控制器(PLC)是在继电接触控制的基础上,结合先进的微机技术发展起来的一种新型的工业控制机。
它发展迅速,应用广泛,特别适合于顺序控制,是机械自动化中一种基础的控制设备。
它将填补继电接触控制与微机数控之间的一大块空白。
为了降低气动机械手系统的开发成本,介绍了基于PLC控制的气动机械手系统中PLC 的选择、PLC与器件的逻辑电路连接、I/O的分配以及气动机械手系统的气动原理和工作原理等。
与同类系统相比,节省了大量的电气元件,大大降低了开发成本。
基于PLC控制的气动机械手是以压缩空气为动力源,电磁阀为控制元件,气缸为执行元件,实现各种需要的动作,具有系统结构简单、造价成本低、工作环境要求低、设计和制造周期短等优点,因此受到越来越广泛地重视。
以PLC为核心的气动机械手控制系统具有较强的抗干扰能力、编程方便、系统的可改造和可扩展性好,特别适用于点位控制模式的机械手。
本文将阐述一种用于机械搬运的基于欧姆龙CPM1A系列中的CPM1A-40COR-AV1型PLC 系统的PLC控制气动机械手。
用机械手取代人工搬运,用PLC取代继电器控制,实现搬运过程自动化。
最后,利用实验室的现有器件,对气动机械手进行模拟实验,进一步证明了该气动机械手的可行性。
【关键词】搬运机械手气动可编程控制器(PLC)梯形图IAbstractManipulator is a kind of device which has the function of grabbing and moving the workpieces automatically and used in the automatic production process. It is a new type of device which is developed in the process of mechanical automation production, and play a very important role in the production process. Manipulator can take the place of human from risk, repetitive and boring work, reduce human labor intensity, improve labor productivity, so the manipulator has become more and more widely used in the process of production.Programmable Logic controller (PLC) is a new type of industrial control machine which is developed on the basis of the relay contact control, combined with advanced computer technology. It developed rapidly and widely, especially suitable for the sequential control. It is a kind of basic mechanical automation control equipment. It will fill the relay contact control with a large gap between the microcomputer numerical control.In order to reduce the development cost of pneumatic manipulator system, introduced a pneumatic manipulator based on PLC control system which is the selection of PLC, the PLC connected to the logic circuit of the device, the distribution of the I/O , pneumatic principle and the working principle of the pneumatic manipulator system. Compared with the similar system, it is saved a lot of electrical components, greatly reduced the cost of development.Pneumatic manipulator based on PLC control use compressed air as power source, electromagnetic valve as control components, cylinder as actuators, realize the various need of action, with a simple system structure , lower cost , lower requirements of working environment ,and a shorter design and manufacturing cycle etc. So it has more and more widely attention. Pneumatic manipulator control system based on PLC as the core has strong anti-interference ability, easy programming and can be modified and scalability of the system .Especially suitable for the position control mode of the manipulator.This article describes a kind of OMRON PLC system of CPM1A-40COR-A V1control of pneumatic manipulator for mechanical transport. Manipulator to replace manual transport, replacing relay with PLC control, to realize the automatic transport process. Finally, by using the existing devices in the laboratory, make the simulated experiment of pneumatic manipulator. Then further proved the feasibility of the pneumatic manipulator.【Keyword】TransportManipulator Pneumatic PLC TrapeziumDrawingII目录摘要 (I)Abstract (II)1绪论............................................................................................................................. - 1 -1.1搬运机械手的研究目的和意义...................................................................... - 1 -1.2国内外机械手的研究概况.............................................................................. - 1 -1.3机械手的分类.................................................................................................. - 2 -1.4气压传动与控制的应用举例.......................................................................... - 3 -1.5气控的优缺点及新发展.................................................................................. - 4 -1.6本文研究内容.................................................................................................. - 5 -1.6.1研究目的............................................................................................... - 5 -1.6.2本文主要研究内容............................................................................... - 5 -1.6.3论文的主要结构................................................................................... - 6 -2 气动搬运机械手的机械系统设计............................................................................ - 7 -2.1 气动搬运机械手的工作任务......................................................................... - 7 -2.2 气动搬运机械手的结构与动作设计............................................................. - 7 -2.2.1气动搬运机械手的结构设计 ............................................................. - 7 -2.2.2气动搬运机械手的动作设计 ............................................................. - 8 -2.3气动机械手的部件研究.................................................................................. - 9 -2.4机械手的主要参数........................................................................................ - 11 - 3搬运机械手的气动控制系统设计........................................................................... - 13 -3.1搬运机械手的气动驱动系统........................................................................ - 13 -3.1.1气动执行机构................................................................................... - 13 -3.1.2气动阀............................................................................................... - 17 -3.1.3气源..................................................................................................... - 18 -3.1.4气动三联件....................................................................................... - 19 -3.2气动控制系统设计的有关事项.................................................................... - 20 -3.3搬运机械手电控气动回路图........................................................................ - 20 -3.4绘制电控气动回路原理图............................................................................ - 21 -3.5本章小结........................................................................................................ - 22 - 4气动搬运机械手PLC控制程序设计 ....................................................................... - 23 -4.1可编程序控制器(PLC)简介 ...................................................................... - 23 -4.2 PLC的特点..................................................................................................... - 24 -4.3可编程序控制器的控制过程与控制步骤.................................................... - 25 -4.3.1可编程序控制器的控制过程 ........................................................... - 25 -4.3.2可编程序控制器的控制步骤 ........................................................... - 25 -4.4可编程序控制器的编程规则........................................................................ - 26 -III4.5控制系统PLC的选型.................................................................................... - 26 -4.6关于CX-Programmer编程软件 .................................................................... - 27 -4.7气动搬运机械手的PLC控制器程序设计 .................................................... - 29 -4.7.1机械手动作顺序表........................................................................... - 29 -4.7.2 机械手的I/O分配图....................................................................... - 29 -4.7.3机械手控制系统功能分析 ............................................................... - 30 -4.7.4 机械手PLC梯形图程序设计 .......................................................... - 30 -4.8本章小结........................................................................................................ - 31 - 5气动搬运机械手的模拟实验................................................................................... - 32 -5.1 实验目的....................................................................................................... - 32 -5.2 实验器材....................................................................................................... - 32 -5.3 实验步骤....................................................................................................... - 36 -5.4 实验过程展示............................................................................................... - 36 -5.5 实验结论....................................................................................................... - 37 -5.6实验收获........................................................................................................ - 37 - 6总结与展望............................................................................................................... - 38 - 参考文献...................................................................................................................... - 39 - 致谢.............................................................................................................................. - 40 -IV1绪论1.1搬运机械手的研究目的和意义机械手是在自动化生产过程中使用的一种具有抓取和移动工件功能的自动化装置,它是在机械化、自动化生产过程中发展起来的一种新型装置。
搬运机械手PLC控制硬件设计

2.绘制电路图
3.电路改进
3.电路改进
感谢聆听
起动按钮 停止按钮
1.输入输出(IO)分配:
输入
输入端子I0.0至I0.4分别对应各限位开关 SQ1到SQ5; 输1-3; 输入端子I1.0至I1.5分别对应按钮SB1至 SB6。
工件夹紧限位开关 机械手左限位开关 机械手右限位开关 机械手上限位开关 机械手下限位开关
搬运机械手PLC控制
项目导入
项目导入
动画模拟
.
1.输入输出(IO)分配:
夹紧与松开 上升与下降
左右移动
1.输入输出(IO)分配:
输出
工件夹紧电磁阀线圈 机械手左行电磁阀线圈 机械手右行电磁阀线圈 机械手下降电磁阀线圈
1.输入输出(IO)分配:
输入 工件夹紧限位开关 机械手左限位开关 机械手右限位开关 机械手上限位开关 机械手下限位开关
小型气动搬运机械手的控制系统开发与设计

小型气动搬运机械手的控制系统开发与设计吕明珠;高瑞【摘要】针对自动化生产线中对于搬运机械手的动作要求,开发了一种小型气动机械手的控制系统.文中提出了气压传动驱动回路的设计思路,采用了双控电磁阀和双向气缸配合控制的气路结构,建立了基于PLC的控制系统组成框图,确定了PLC的输入/输出点数并选择了PLC的型号,设计了PLC的外部接线图、控制程序和顺序功能图.本控制系统可以实现手动和自动控制两种模式,手动控制时可以用按钮实现单步运行,自动控制时利用磁性接近开关实现信号的采集和反馈,与传统的继电器控制系统相比,具有运行准确、动作灵活、易于维护、成本低廉的优点,有较强的实际应用价值.实验结果表明,该控制系统具有良好的可行性和可靠性.【期刊名称】《机械设计与制造》【年(卷),期】2016(000)011【总页数】4页(P215-217,222)【关键词】气动;搬运机械手;控制系统;PLC;顺序功能图【作者】吕明珠;高瑞【作者单位】辽宁装备制造职业技术学院自控学院,辽宁沈阳110161;沈阳出入境检验检疫局,辽宁沈阳110016【正文语种】中文【中图分类】TH16;TP24随着工业自动化程度的提高,机械手被广泛应用于机械制造、冶金、汽车、电子、轻工等行业[1],尤其是一些劳动任务繁重、重复性高、工作环境不佳的场合,如工件搬运、零件拆卸、产品码垛等[2]。
目前,机械手按驱动方式不同可以分为液压式、气动式、电动式等多种类型[3],人们在追求机械手运行可靠性高的同时,更希望提高机械手的灵活性和运行轨迹的准确性,而传统的继电接触器控制系统由于本身硬接线硬触点的局限性很难完成对机械手整机的升级改造[4]。
因此,很多企业都在尝试用智能化的控制器来实现对机械手控制系统的重新设计。
当今,普遍使用的主流智能控制器就是可编程逻辑控制器(简称PLC),然而由于使用的PLC厂家和型号不同,对机械手控制系统的改造程度也各不相同[5]。
搬运机械手控制系统设计

目录前言 (1)第一章绪论 (2)1。
1课题背景与现实意义 (2)1。
2可编程控制器的产生特点及发展趋势 (2)1。
3本文主要工作 (7)第二章方案论证和选择 (8)2.1 题目与要求 (8)2.2 方案选择与论证 (9)2.2.1利用单片机实现对机械手的控制 (9)2。
2。
2利用传统继电器实现对机械手的控制 (9)2。
2.3 实现对机械手的控制 (9)2。
3 系统流程图 (10)第三章系统的硬件设计 (11)3.1 功能按钮概述 (11)3.2 机械手传送系统输入和输出点分配表 (11)3.3 输入和输出点分配表 (11)3。
4 输入和输出点原理接线图 (12)第四章系统的软件 (13)4.1 机械手操作系统程序图及原理 (13)4.1.1 操作程序图 (13)4。
1.2 操作系统原理 (13)4.2 原位程序 (13)4.3 动单步操作程序 (14)4.4 自动操作程序 (15)4.4。
1 程序原理 (15)4.4。
2 操作状态转移图 (15)4.5 机械手传送系统梯形图 (16)4.6 系统调试 (18)第五章总结与展望 (20)5.1 系统总结 (20)5.2 展望 (20)参考文献 (21)前言工业机械手是近几十年发展起来的一种高科技自动化生产设备。
工业机械手的是工业机器人的一个重要分支。
机械手技术涉及到力学、机械学、电气液压技术、自动控制技术、传感器技术和计算机技术等科学领域,是一门跨学科综合技术。
它的特点是可通过编程来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,尤其体现了人的智能和适应性。
机械手作业的准确性和各种环境中完成作业的能力,在国民经济各领域有着广阔的发展前景.用机械手可以代替人从事单调﹑重复或繁重的体力劳动﹐实现生產的机械化和自动化﹐代替人在有害环境下的手工操作﹐改善劳动条件﹐保证人身安全。
20世纪40年代后期﹐美国在原子能实验中﹐首先采用机械手搬运放射性材料﹐人在安全室操纵机械手进行各种操作和实验。