Adaptive visual guidance of mobile robots based on takagi-sugeno model
《2024年基于上下文感知及边界引导的伪装物体检测研究》范文

《基于上下文感知及边界引导的伪装物体检测研究》篇一一、引言在现实生活中,伪装物体常常由于外观的迷惑性或难以被识别的特点,成为了诸多场景中的潜在隐患。
特别是在安防、监控和侦查等应用场景中,如何快速准确地检测并识别伪装物体成为了一项迫切的需求。
本文旨在研究基于上下文感知及边界引导的伪装物体检测技术,通过深度学习和图像处理技术,实现对伪装物体的有效检测和识别。
二、相关技术背景随着计算机视觉和人工智能技术的发展,伪装物体检测技术在图像处理、机器学习等领域取得了显著的研究成果。
传统方法主要通过颜色、形状、纹理等特征对物体进行检测和识别,但在面对复杂的现实环境时,往往存在较大的误检率和漏检率。
近年来,基于深度学习的伪装物体检测技术逐渐成为研究热点,通过大量数据的训练和学习,实现对伪装物体的精确检测和识别。
三、上下文感知的伪装物体检测上下文感知的伪装物体检测是利用图像中物体的上下文信息,提高检测的准确性和鲁棒性。
本文采用基于区域的方法,将图像划分为多个区域,对每个区域进行特征提取和分类。
同时,通过分析不同区域之间的空间关系和上下文信息,实现对伪装物体的准确检测。
此外,本文还采用基于全局的方法,通过构建图像的上下文模型,对图像中的每个像素进行分类和识别,从而实现对伪装物体的全面检测。
四、边界引导的伪装物体检测边界引导的伪装物体检测是利用图像中的边缘信息,提高对伪装物体的定位精度。
本文采用Canny边缘检测算法对图像进行边缘提取,然后通过边缘信息对图像进行分割和识别。
同时,结合上下文感知技术,对分割后的区域进行特征分析和分类,实现对伪装物体的精确定位和识别。
此外,本文还利用边界信息构建目标函数,通过优化算法实现对伪装物体的精确检测和识别。
五、实验与分析本文采用公开数据集进行实验验证,对基于上下文感知及边界引导的伪装物体检测方法进行评估。
实验结果表明,该方法在面对复杂多变的现实环境时,具有较高的准确性和鲁棒性。
与传统的伪装物体检测方法相比,该方法在误检率和漏检率方面均有所降低。
《2024年基于机器学习算法的超材料快速自动设计研究》范文
《基于机器学习算法的超材料快速自动设计研究》篇一一、引言超材料作为一种具有独特物理特性的新型材料,近年来在众多领域中得到了广泛的应用。
然而,超材料的设计往往需要复杂的物理模型和精细的实验验证,导致设计过程既耗时又昂贵。
因此,寻求一种高效、自动化的超材料设计方法成为了科研领域的迫切需求。
本文提出了一种基于机器学习算法的超材料快速自动设计方法,旨在通过算法的智能优化来提高超材料设计的效率和准确性。
二、研究背景及意义随着人工智能和机器学习技术的快速发展,其在材料科学领域的应用也越来越广泛。
通过机器学习算法,我们可以从大量的材料数据中学习并发现材料性质与结构之间的内在规律,为材料的快速设计和优化提供有力支持。
将机器学习算法应用于超材料设计,不仅可以提高设计效率,还可以降低实验成本,推动超材料在各个领域的应用。
三、研究方法本研究采用了一种基于深度学习的机器学习算法,通过构建超材料设计的智能优化模型,实现超材料的快速自动设计。
具体步骤如下:1. 数据准备:收集超材料的相关数据,包括材料的组成、结构、性质等,建立超材料数据库。
2. 特征提取:从超材料数据库中提取对设计有用的特征,如材料的组成比例、结构参数等。
3. 构建模型:利用深度学习算法,构建超材料设计的智能优化模型。
该模型可以根据提取的特征,预测材料的性质和性能。
4. 模型训练与验证:使用部分数据对模型进行训练和验证,确保模型的准确性和可靠性。
5. 自动设计:将模型应用于超材料的自动设计过程中,根据设计要求,自动寻找满足条件的材料组成和结构。
四、实验结果与分析通过实验,我们验证了基于机器学习算法的超材料快速自动设计方法的有效性和准确性。
实验结果如下:1. 设计效率:与传统的超材料设计方法相比,基于机器学习算法的设计方法可以大大提高设计效率。
在同样的时间内,可以设计出更多的超材料方案。
2. 设计准确性:机器学习模型可以准确预测超材料的性质和性能,降低实验验证的次数和成本。
Motion control of robot manipulators
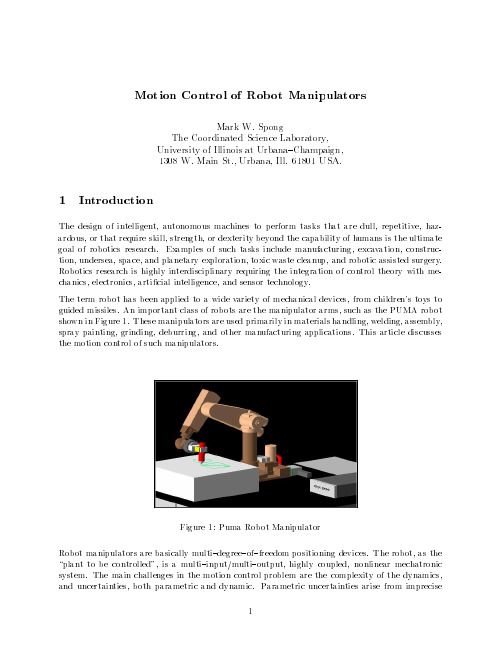
Figure 1: Puma Robot Manipulator Robot manipulators are basically multi{degree{of{freedom positioning devices. The robot, as the \plant to be controlled", is a multi{input/multi{output, highly coupled, nonlinear mechatronic system. The main challenges in the motion control problem are the complexity of the dynamics, and uncertainties, both parametric and dynamic. Parametric uncertainties arise from imprecise 1
Motion Control of Robot Manipulators
Mark W. Spong The Coordinated Science Laboratory, University of Illinois at Urbana{Champaign, 1308 W. Main St., Urbana, Ill. 61801 USA.
1.2 Kinematics
Kinematics refers to the geometric relationship between the motion of the robot in Joint Space and the motion of the end{e ector in Task Space without consideration of the forces that produce the motion. The Forward Kinematics Problem is to determine the mapping
英语作文mobile phone

The mobile phone has become an indispensable part of modern life,transforming the way we communicate,work,and entertain ourselves.Heres a detailed look at the various aspects of mobile phones and their impact on society.Innovation and Technology:Mobile phones have evolved from simple communication devices to sophisticated gadgets equipped with cuttingedge technology.They now feature highresolution cameras, powerful processors,and vast storage capacities.The integration of artificial intelligence and machine learning has further enhanced their capabilities,enabling features like voice assistants and facial recognition.Communication:The primary function of a mobile phone is to facilitate communication.With the advent of smartphones,people can now make voice calls,send text messages,and engage in video calls with ease.Social media apps have also become integral to mobile phones, allowing users to stay connected with friends and family across the globe.Information Access:Smartphones have democratized access to information.With a simple search query,users can access a wealth of knowledge on any topic.News apps,ebooks,and online courses are just a few examples of how mobile phones have become a portal to endless information.Entertainment:Gaming,music,and video streaming are some of the ways mobile phones provide entertainment.Mobile games range from simple puzzles to complex roleplaying games, catering to a wide audience.Streaming services have made it possible to watch movies and TV shows onthego,and music apps have transformed the way we listen to our favorite tunes.Business and Productivity:Mobile phones have revolutionized the business world.Professionals can now manage their work remotely through email,project management apps,and video conferencing. The portability of smartphones has made it easier for entrepreneurs to stay connected to their businesses at all times.Health and Fitness:Many smartphones come with builtin health and fitness tracking features.These include step counters,heart rate monitors,and sleep trackers,which help users monitor their physical activity and overall health.Additionally,numerous apps are available fortracking diet,meditation,and mental health.Education:Educational apps and online courses have made learning more accessible and convenient. Students can use their mobile phones to study,complete assignments,and even take nguage learning apps,for example,have made it easier for people to learn new languages on their own time.Challenges and Concerns:While mobile phones offer numerous benefits,they also come with challenges.Issues such as privacy,security,and the potential for addiction are concerns that need to be addressed.Additionally,the digital divide remains a problem,with many people around the world lacking access to mobile technology.Future Prospects:The future of mobile phones looks promising,with advancements in5G technology, foldable screens,and augmented reality.These innovations are expected to further integrate mobile phones into our daily lives,making them even more essential tools for communication,work,and entertainment.In conclusion,mobile phones have transformed the way we live,work,and interact with the world.As technology continues to advance,the role of mobile phones in our lives is only set to grow,offering new opportunities and challenges along the way.。
三维适应性选择转换与汉英公示语翻译
w t y u e ”另一处 翻译成“at n sp , ac o rt , h sp cui ,l ” 不仅译法不统 o i
,
一
而 且都 不恰 当 。 ‘ thy u t ” 意 思是 注 意 脚 下 , ' c o rs p 的 wa e 英
市西湖区提 出了 “ 品质西湖、 和谐社 ’ 的宣传 口号 , 但其译文
“
q a tXi ,amo i s oi y 却 让 人 匪夷 所 思 。首先 , u ly h h r no ce ' i u u s t’ 原
公示语 中的 ‘ 湖” 西 指的是 ‘ 湖区” 西 而不是著名的旅游景点 ‘ 西
---— —
进 行 调 整 , 改 译 为 “tv r ai d amo iu f 拟 Sr e o q lya r no si i i f au t n h len
Xiu Dit c' h sr t 。 i ’
w in e od , at gt b l' 他们更乐意被称为 “itr。 i o t ’ vso' i ’
适应和至少 ‘ 维” 三 的选择转换 , 才可能产生出恰 当的译 文; 适 应转换的维度越多 , 选择的适应性越 高, 译文 的整合适应选择
度 ( ge f oiiaattnadsl t n 也 才有 可 能 相 也e ere h lt pao e i ) d o sc d i n e co
在杭州植物园 内,小卖部” “ 被译成 了‘ma o '‘ma ' ls p .s l s lh ’' l so”的字面意思是小商店 , hp 这在 中国人看来很好理解 , 可是
外国游客就要迷茫了。小卖部” “ 里卖 的是食品 、 饮料 , s l 而 ma l
《2024年基于上下文感知及边界引导的伪装物体检测研究》范文

《基于上下文感知及边界引导的伪装物体检测研究》篇一一、引言随着人工智能技术的不断发展,计算机视觉在众多领域得到了广泛应用。
其中,伪装物体检测是计算机视觉领域的一个重要研究方向。
伪装物体指的是在特定场景中,通过伪装手段(如改变颜色、形状等)试图隐藏或混淆真实物体的存在。
伪装物体检测的目的是在图像或视频中准确地识别出这些伪装物体,为后续的图像处理和识别任务提供支持。
然而,由于伪装物体的多样性和复杂性,传统的伪装物体检测方法往往难以取得满意的效果。
因此,本文提出了一种基于上下文感知及边界引导的伪装物体检测方法,旨在提高伪装物体检测的准确性和效率。
二、相关工作在伪装物体检测领域,传统的检测方法主要依赖于手工设计的特征提取器和分类器。
然而,这些方法往往难以应对复杂多变的伪装手段和场景变化。
近年来,随着深度学习技术的发展,基于深度学习的伪装物体检测方法逐渐成为研究热点。
这些方法通过训练大量的数据来学习图像中的特征和模式,从而实现对伪装物体的准确检测。
然而,现有的方法仍然存在一些局限性,如对上下文信息的忽视和边界信息的利用不足等。
三、方法本文提出的基于上下文感知及边界引导的伪装物体检测方法主要包括以下两个部分:1. 上下文感知模块:该模块通过分析图像中的上下文信息,提取出与伪装物体相关的特征。
具体而言,我们利用卷积神经网络(CNN)来学习图像中的局部和全局特征,同时结合图像中的语义信息,如物体的形状、颜色等。
通过上下文感知模块,我们可以更准确地识别出伪装物体及其周围环境的关系。
2. 边界引导模块:该模块通过分析图像中物体的边界信息,提高对伪装物体的检测效果。
我们利用边缘检测算法来提取图像中的边缘信息,并结合上下文感知模块的结果,对边缘信息进行优化和补充。
通过边界引导模块,我们可以更准确地定位和识别出伪装物体的位置和形状。
四、实验为了验证本文提出的方法的有效性,我们在多个数据集上进行了实验。
实验结果表明,我们的方法在伪装物体检测任务中取得了显著的效果提升。
《2024年基于机器学习算法的超材料快速自动设计研究》范文

《基于机器学习算法的超材料快速自动设计研究》篇一一、引言超材料是一种具有独特物理特性的新型材料,其设计和制造对于许多领域如电子、光学、电磁学等具有重要意义。
随着科技的发展,对超材料的需求和设计复杂性都在不断增加。
传统的设计方法往往需要依赖大量的实验和经验,过程耗时且成本高昂。
因此,如何实现超材料的快速自动设计成为了一个重要的研究方向。
近年来,随着机器学习技术的发展,为超材料的快速自动设计提供了新的可能性。
本文将探讨基于机器学习算法的超材料快速自动设计的研究。
二、研究背景机器学习是一种通过训练大量数据来寻找数据内在规律和模式的方法。
在超材料设计中,可以通过训练机器学习模型来学习超材料的结构、性质和性能之间的关系,从而实现超材料的快速自动设计。
该研究方向不仅有望提高超材料设计的效率和准确性,还可能推动相关领域的技术进步。
三、研究方法本研究采用机器学习算法对超材料进行快速自动设计。
具体步骤如下:1. 数据收集:收集大量超材料的结构、性质和性能数据,作为训练机器学习模型的样本。
2. 模型训练:使用合适的机器学习算法(如深度学习、神经网络等)对样本进行训练,建立超材料结构、性质和性能之间的映射关系。
3. 模型验证:使用验证集对训练好的模型进行验证,确保模型的准确性和可靠性。
4. 快速自动设计:利用训练好的模型进行超材料的快速自动设计,根据需求自动生成满足特定性能的超材料结构。
四、实验结果与分析通过实验,我们发现在使用适当的机器学习算法后,可以有效地建立超材料结构、性质和性能之间的映射关系。
在模型验证阶段,我们发现模型的准确性和可靠性较高,能够满足实际需求。
在快速自动设计阶段,我们根据不同需求自动生成了多种满足特定性能的超材料结构,验证了该方法的有效性。
五、讨论与展望本研究为超材料的快速自动设计提供了一种新的方法。
与传统的设计方法相比,该方法具有更高的效率和准确性。
未来,我们可以进一步优化机器学习模型,提高其准确性和可靠性,以适应更多种类的超材料设计需求。
《2024年立体匹配与点云重建关键技术的研究》范文
《立体匹配与点云重建关键技术的研究》篇一一、引言随着计算机视觉技术的快速发展,立体匹配与点云重建作为其重要组成部分,已经成为了科研和工程领域的重要研究方向。
立体匹配通过获取同一场景从不同角度拍摄的两张或多张图像,来估计场景中各点的三维信息。
而点云重建则是在立体匹配的基础上,通过一系列算法处理,将三维空间中的点云数据整合成三维模型。
本文将重点研究立体匹配与点云重建的关键技术,并探讨其在实际应用中的价值。
二、立体匹配关键技术研究1. 立体匹配概述立体匹配是计算机视觉领域中的一个基本问题,其目的是从两幅或多幅图像中提取出对应的特征点,并计算这些特征点在三维空间中的位置。
立体匹配的准确性直接影响到后续的三维重建和识别等任务的精度。
2. 立体匹配算法研究目前,常见的立体匹配算法包括基于区域、基于特征和基于相位的方法。
其中,基于特征的方法因其计算效率高、对光照和噪声的鲁棒性较好而受到广泛关注。
在特征提取方面,SIFT、SURF和ORB等算法被广泛应用于立体匹配任务中。
此外,深度学习在立体匹配中也取得了显著的成果,如Displets、MC-CNN 等模型均能实现较高的匹配精度。
三、点云重建关键技术研究1. 点云重建概述点云重建是指将通过立体匹配等方法获得的三维空间点云数据整合成三维模型的过程。
点云数据具有丰富的几何信息,因此点云重建在三维建模、虚拟现实、机器人导航等领域具有广泛的应用价值。
2. 点云重建算法研究点云重建算法主要包括表面重建和纹理映射两个部分。
表面重建的目的是从无序的点云数据中恢复出物体的表面形状,常见的算法包括Delaunay三角剖分、泊松重建等。
纹理映射则是将二维图像的纹理信息映射到三维模型上,以增强模型的视觉效果。
近年来,深度学习在点云处理方面也取得了显著的进展,如PointNet、PointNet++等模型均能实现高效的点云处理和分类任务。
四、立体匹配与点云重建的融合与应用1. 融合方法研究立体匹配与点云重建的融合是提高三维重建精度的关键。
《2024年立体匹配与点云重建关键技术的研究》范文

《立体匹配与点云重建关键技术的研究》篇一一、引言立体匹配与点云重建是计算机视觉和三维重建领域的重要技术。
随着三维传感器和计算机视觉技术的快速发展,立体匹配与点云重建技术在许多领域得到了广泛应用,如无人驾驶、机器人导航、虚拟现实等。
本文旨在研究立体匹配与点云重建的关键技术,分析其原理、方法及存在的问题,并探讨其未来的发展趋势。
二、立体匹配技术研究1. 立体匹配基本原理立体匹配是利用两幅或多幅不同视角的图像,通过算法找到场景中同一目标点的对应关系,从而获取物体的深度信息。
立体匹配技术主要包括特征提取、特征匹配和视差计算等步骤。
2. 特征提取与匹配方法特征提取是立体匹配的关键步骤,其目的是从图像中提取出具有代表性的特征点。
常用的特征提取方法包括SIFT、SURF、ORB等。
在特征提取的基础上,采用特征匹配算法寻找两幅图像中的对应关系,如基于区域、基于特征的匹配方法等。
3. 视差计算与优化通过特征匹配得到的视差图存在噪声和错误匹配等问题,需要进行视差计算和优化。
常见的视差计算方法包括基于全局优化算法的视差计算和基于局部优化算法的视差计算。
此外,为了提高匹配精度,还需要对视差图进行优化处理,如采用左右一致性检查等方法。
三、点云重建技术研究1. 点云重建基本原理点云重建是指根据一组空间中的点集,通过算法重建出物体的三维模型。
点云数据可以通过各种传感器获取,如激光扫描仪、深度相机等。
点云重建技术主要包括数据采集、预处理、配准和建模等步骤。
2. 数据采集与预处理数据采集是点云重建的第一步,通过传感器获取场景的点云数据。
由于传感器和环境的干扰,获取的点云数据可能存在噪声、缺失等问题,需要进行预处理操作,如去噪、滤波、填充等。
3. 点云配准与建模在完成数据预处理后,需要对点云数据进行配准操作,即将不同视角下的点云数据统一到同一坐标系下。
配准完成后,通过建模算法将点云数据转换为三维模型。
常用的建模算法包括表面重建算法、体素化算法等。
协作移动机器人-前因和方向外文文献翻译、中英文翻译、外文翻译

Cooperative Mobile Robotics: Antecedents and DirectionsY. UNY CAOComputer Science Department, University of California, Los Angeles, CA 90024-1596ALEX S. FUKUNAGAJet Propulsion Laboratory, California Institute of Technology, Pasadena, CA 91109-8099ANDREW B. KAHNGComputer Science Department, University of California, Los Angeles, CA 90024-1596Editors: R.C. Arkin and G.A. BekeyAbstract. There has been increased research interest in systems composed of multiple autonomous mobile robots exhibiting cooperative behavior. Groups of mobile robots are constructed, with an aim to studying such issues as group architecture, resource conflict, origin of cooperation, learning, and geometric problems. As yet, few applications of cooperative robotics have been reported, and supporting theory is still in its formative stages. In this paper, we give a critical survey of existing works and discuss open problems in this field, emphasizing the various theoretical issues that arise in the study of cooperative robotics. We describe the intellectual heritages that have guided early research, as well as possible additions to the set of existing motivations.Keywords: cooperative robotics, swarm intelligence, distributed robotics, artificial intelligence, mobile robots, multiagent systems1. PreliminariesThere has been much recent activity toward achieving systems of multiple mobile robots engaged in collective behavior. Such systems are of interest for several reasons:•tasks may be inherently too complex (or im-possible) for a single robot to accomplish, or performance benefits can be gained from using multiple robots;•building and using several simple robots can be easier, cheaper, more flexible and more fault-tolerant than having a single powerful robot foreach separate task; and•the constructive, synthetic approach inherent in cooperative mobile robotics can possibly∗This is an expanded version of a paper which originally appeared in the proceedings of the 1995 IEEE/RSJ IROS conference. yield insights into fundamental problems in the social sciences (organization theory, economics, cognitive psychology), and life sciences (theoretical biology, animal ethology).The study of multiple-robot systems naturally extends research on single-robot systems, butis also a discipline unto itself: multiple-robot systems can accomplish tasks that no single robot can accomplish, since ultimately a single robot, no matter how capable, is spatially limited. Multiple-robot systems are also different from other distributed systems because of their implicit “real-world” environment, which is presumably more difficult to model and reason about than traditional components of distributed system environments (i.e., computers, databases, networks).The term collective behavior generically denotes any behavior of agents in a system having more than one agent. the subject of the present survey, is a subclass of collective behavior that is characterized by cooperation. Webster’s dictionary [118] defines “cooperate” as “to associate with anoth er or others for mutual, often economic, benefit”. Explicit definitions of cooperation in the robotics literature, while surprisingly sparse, include:1. “joint collaborative behavior that is directed toward some goal in which there is a common interest or reward” [22];2. “a form of interaction, usually based on communication” [108]; and3. “[joining] together for doing something that creates a progressive result such as increasing performance or saving time” [137].These definitions show the wide range of possible motivating perspectives. For example, definitions such as (1) typically lead to the study of task decomposition, task allocation, and other dis-tributed artificial intelligence (DAI) issues (e.g., learning, rationality). Definitions along the lines of (2) reflect a concern with requirements for information or other resources, and may be accompanied by studies of related issues such as correctness and fault-tolerance. Finally, definition (3) reflects a concern with quantified measures of cooperation, such as speedup in time to complete a task. Thus, in these definitions we see three fundamental seeds: the task, the mechanism of cooperation, and system performance.We define cooperative behavior as follows: Given some task specified by a designer, a multiple-robot system displays cooperative behavior if, due to some underlying mechanism (i.e., the “mechanism of cooperation”), there is an increase in the total utility of the system. Intuitively, cooperative behavior entails some type of performance gain over naive collective behavior. The mechanism of cooperation may lie in the imposition by the designer of a control or communication structure, in aspects of the task specification, in the interaction dynamics of agent behaviors, etc.In this paper, we survey the intellectual heritage and major research directions of the field of cooperative robotics. For this survey of cooperative robotics to remain tractable, we restrict our discussion to works involving mobile robots or simulations of mobile robots, where a mobile robot is taken to be an autonomous, physically independent, mobile robot. In particular, we concentrated on fundamental theoretical issues that impinge on cooperative robotics. Thus, the following related subjects were outside the scope of this work:•coordination of multiple manipulators, articulated arms, or multi-fingered hands, etc.•human-robot cooperative systems, and user-interface issues that arise with multiple-robot systems [184] [8] [124] [1].•the competitive subclass of coll ective behavior, which includes pursuit-evasion [139], [120] and one-on-one competitive games [12]. Note that a cooperative team strategy for, e.g., work on the robot soccer league recently started in Japan[87] would lie within our present scope.•emerging technologies such as nanotechnology [48] and Micro Electro-Mechanical Systems[117] that are likely to be very important to co-operative robotics are beyond the scope of this paper.Even with these restrictions, we find that over the past 8 years (1987-1995) alone, well over 200papers have been published in this field of cooperative (mobile) robotics, encompassing theories from such diverse disciplines as artificial intelligence, game theory/economics, theoretical biology, distributed computing/control, animal ethology and artificial life.We are aware of two previous works that have surveyed or taxonomized the literature. [13] is abroad, relatively succinct survey whose scope encompasses distributed autonomous robotic systems(i.e., not restricted to mobile robots). [50] focuses on several well-known “swarm” architectures (e.g., SWARM and Mataric’s Behavior-based architecture –see Section 2.1) and proposes a taxonomy to characterize these architectures. The scope and intent of our work differs significantly from these, in that (1) we extensively survey the field of co-operative mobile robotics, and (2) we provide a taxonomical organization of the literature based on problems and solutions that have arisen in the field (as opposed to a selected group of architectures). In addition, we survey much new material that has appeared since these earlier works were published.Towards a Picture of Cooperative RoboticsIn the mid-1940’s Grey Walter, along with Wiener and Shannon, studied turtle-like robots equipped wit h light and touch sensors; these simple robots exhibited “complex social behavior” in responding to each other’s movements [46]. Coordination and interactions of multiple intelligent agents have been actively studied in the field of distributed artificial intelligence (DAI) since the early 1970’s[28], but the DAI field concerned itself mainly with problems involving software agents. In the late 1980’s, the robotics research community be-came very active in cooperative robotics, beginning with projects such as CEBOT [59], SWARM[25], ACTRESS [16], GOFER [35], and the work at Brussels [151]. These early projects were done primarily in simulation, and, while the early work on CEBOT, ACTRESS and GOFER have all had physical implementations (with≤3 robots), in some sense these implementations were presented by way of proving the simulation results. Thus, several more recent works (cf. [91], [111], [131])are significant for establishing an emphasis on the actual physical implementation of cooperative robotic systems. Many of the recent cooperative robotic systems, in contrast to the earlier works, are based on a behavior-based approach (cf. [30]).Various perspectives on autonomy and on the connection between intelligence and environment are strongly associated with the behavior-based approach [31], but are not intrinsic to multiple-robot systems and thus lie beyond our present scope. Also note that a recent incarnation of CEBOT, which has been implemented on physical robots, is based on a behavior-based control architecture[34].The rapid progress of cooperative robotics since the late 1980’s has been an interplay of systems, theories and problems: to solve a given problem, systems are envisioned, simulated and built; theories of cooperation are brought from other fields; and new problems are identified (prompting further systems and theories). Since so much of this progress is recent, it is not easy to discern deep intellectual heritages from within the field. More apparent are the intellectualheritages from other fields, as well as the canonical task domains which have driven research. Three examples of the latter are:•Traffic Control. When multiple agents move within a common environment, they typically attempt to avoid collisions. Fundamentally, this may be viewed as a problem of resource conflict, which may be resolved by introducing, e.g., traffic rules, priorities, or communication architectures. From another perspective, path planning must be performed taking into con-sideration other robots and the global environment; this multiple-robot path planning is an intrinsically geometric problem in configuration space-time. Note that prioritization and communication protocols – as well as the internal modeling of other robots – all reflect possible variants of the group architecture of the robots. For example, traffic rules are commonly used to reduce planning cost for avoiding collision and deadlock in a real-world environment, such as a network of roads. (Interestingly, behavior-based approaches identify collision avoidance as one of the most basic behaviors [30], and achieving a collision-avoidance behavior is the natural solution to collision avoidance among multiple robots. However, in reported experiments that use the behavior-based approach, robots are never restricted to road networks.) •Box-Pushing/Cooperative Manipulation. Many works have addressed the box-pushing (or couch-pushing) problem, for widely varying reasons. The focus in [134] is on task allocation, fault-tolerance and (reinforcement) learning. By contrast, [45] studies two boxpushing protocols in terms of their intrinsic communication and hardware requirements, via the concept of information invariants. Cooperative manipulation of large objects is particularly interesting in that cooperation can be achieved without the robots even knowing of each others’ existence [147], [159]. Other works in the class of box-pushing/object manipulation include [175] [153] [82] [33] [91] [94] [92][114] [145] [72] [146].•Foraging. In foraging, a group of robots must pick up objects scattered in the environment; this is evocative of toxic waste cleanup, harvesting, search and rescue, etc. The foraging task is one of the canonical testbeds for cooperative robotics [32] [151] [10] [67] [102] [49] [108] [9][24]. The task is interesting because (1) it can be performed by each robot independently (i.e., the issue is whether multiple robots achieve a performance gain), and (2) as discussed in Section 3.2, the task is also interesting due to motivations related to the biological inspirations behind cooperative robot systems. There are some conceptual overlaps with the related task of materials handling in a manufacturing work-cell [47]. A wide variety of techniques have been applied, ranging from simple stigmergy (essentially random movements that result in the fortuitous collection of objects [24] to more complex algorithms in which robots form chains along which objects are passed to the goal [49].[24] defines stigmergy as “the production of a certain behaviour in agents as a consequence of the effects produced in the local environment by previous behaviour”. This is actually a form of “cooperation without communication”, which has been the stated object of several for-aging solutions since the corresponding formulations become nearly trivial if communication is used. On the other hand, that stigmergy may not satisfy our definition of cooperation given above, since there is no performance improvement over the “naive algorithm” –in this particular case, the proposed stigmergic algorithm is the naive algorithm. Again, group architecture and learning are major research themes in addressing this problem.Other interesting task domains that have received attention in the literature includemulti-robot security systems [53], landmine detection and clearance [54], robotic structural support systems (i.e., keeping structures stable in case of, say ,an earthquake) [107], map making [149], and assembly of objects using multiple robots [175].Organization of PaperWith respect to our above definition of cooperative behavior, we find that the great majority of the cooperative robotics literature centers on the mechanism of cooperation (i.e., few works study a task without also claiming some novel approach to achieving cooperation). Thus, our study has led to the synthesis of five “Research Axes” which we believe comprise the major themes of investigation to date into the underlying mechanism of cooperation.Section 2 of this paper describes these axes, which are: 2.1 Group Architecture, 2.2 Resource Conflict, 2.3 Origin of Cooperation, 2.4 Learning, and 2.5 Geometric Problems. In Section 3,we present more synthetic reviews of cooperative robotics: Section 3.1 discusses constraints arising from technological limitations; and Section 3.2discusses possible lacunae in existing work (e.g., formalisms for measuring performance of a cooperative robot system), then reviews three fields which we believe must strongly influence future work. We conclude in Section 4 with a list of key research challenges facing the field.2. Research AxesSeeking a mechanism of cooperation may be rephrased as the “cooperative behavior design problem”: Given a group of robots, an environment, and a task, how should cooperative behavior arise? In some sense, every work in cooperative robotics has addressed facets of this problem, and the major research axes of the field follow from elements of this problem. (Note that certain basic robot interactions are not task-performing interactions per se, but are rather basic primitives upon which task-performing interactions can be built, e.g., following ([39], [45] and many others) or flocking [140], [108]. It might be argued that these interactions entail “control and coordination” tasks rather than “cooperation” tasks, but o ur treatment does not make such a distinction).First, the realization of cooperative behavior must rely on some infrastructure, the group architecture. This encompasses such concepts as robot heterogeneity/homogeneity, the ability of a given robot to recognize and model other robots, and communication structure. Second, for multiple robots to inhabit a shared environment, manipulate objects in the environment, and possibly communicate with each other, a mechanism is needed to resolve resource conflicts. The third research axis, origins of cooperation, refers to how cooperative behavior is actually motivated and achieved. Here, we do not discuss instances where cooperation has been “explicitly engineered” into the robots’ behavior since this is the default approach. Instead, we are more interested in biological parallels (e.g., to social insect behavior), game-theoretic justifications for cooperation, and concepts of emergence. Because adaptability and flexibility are essential traits in a task-solving group of robots, we view learning as a fourth key to achieving cooperative behavior. One important mechanism in generating cooperation, namely,task decomposition and allocation, is not considered a research axis since (i) very few works in cooperative robotics have centered on task decomposition and allocation (with the notable exceptions of [126], [106], [134]), (ii) cooperative robot tasks (foraging, box-pushing) in the literature are simple enough that decomposition and allocation are not required in the solution, and (iii) the use of decomposition and allocation depends almost entirely on the group architectures(e.g. whether it is centralized or decentralized).Note that there is also a related, geometric problem of optimizing the allocation of tasks spatially. This has been recently studied in the context of the division of the search of a work area by multiple robots [97]. Whereas the first four axes are related to the generation of cooperative behavior, our fifth and final axis –geometric problems–covers research issues that are tied to the embed-ding of robot tasks in a two- or three-dimensional world. These issues include multi-agent path planning, moving to formation, and pattern generation.2.1. Group ArchitectureThe architecture of a computing sys tem has been defined as “the part of the system that remains unchanged unless an external agent changes it”[165]. The group architecture of a cooperative robotic system provides the infrastructure upon which collective behaviors are implemented, and determines the capabilities and limitations of the system. We now briefly discuss some of the key architectural features of a group architecture for mobile robots: centralization/decentralization, differentiation, communications, and the ability to model other agents. We then describe several representative systems that have addressed these specific problems.Centralization/Decentralization The most fundamental decision that is made when defining a group architecture is whether the system is centralized or decentralized, and if it is decentralized, whether the system is hierarchical or distributed. Centralized architectures are characterized by a single control agent. Decentralized architectures lack such an agent. There are two types of decentralized architectures: distributed architectures in which all agents are equal with respect to control, and hierarchical architectures which are locally centralized. Currently, the dominant paradigm is the decentralized approach.The behavior of decentralized systems is of-ten described using such terms as “emergence” and “self-organization.” It is widely claimed that decentralized architectures (e.g., [24], [10], [152],[108]) have several inherent advantages over centralized architectures, including fault tolerance, natural exploitation of parallelism, reliability, and scalability. However, we are not aware of any published empirical or theoretical comparison that supports these claims directly. Such a comparison would be interesting, particularly in scenarios where the team of robots is relatively small(e.g., two robots pushing a box), and it is not clear whether the scaling properties of decentralization offset the coordinative advantage of centralized systems.In practice, many systems do not conform toa strict centralized/decentralized dichotomy, e.g., many largely decentralized architectures utilize “leader” agents. We are not aware of any in-stances of systems that are completely centralized, although there are some hybrid centralized/decentralized architectures wherein there is a central planner that exerts high-levelcontrol over mostly autonomous agents [126], [106], [3], [36].Differentiation We define a group of robots to be homogeneous if the capabilities of the individual robots are identical, and heterogeneous otherwise. In general, heterogeneity introduces complexity since task allocation becomes more difficult, and agents have a greater need to model other individuals in the group. [134] has introduced the concept of task coverage, which measures the ability of a given team member to achieve a given task. This parameter is an index of the demand for cooperation: when task coverage is high, tasks can be accomplished without much cooperation, but otherwise, cooperation is necessary. Task coverage is maximal in homogeneous groups, and decreases as groups become more heterogeneous (i.e., in the limit only one agent in the group can perform any given task).The literature is currently dominated by works that assume homogeneous groups of robots. How-ever, some notable architectures can handle het-erogeneity, e.g., ACTRESS and ALLIANCE (see Section 2.1 below). In heterogeneous groups, task allocation may be determined by individual capabilities, but in homogeneous systems, agents may need to differentiate into distinct roles that are either known at design-time, or arise dynamically at run-time.Communication Structures The communication structure of a group determines the possible modes of inter-agent interaction. We characterize three major types of interactions that can be sup-ported. ([50] proposes a more detailed taxonomy of communication structures). Interaction via environmentThe simplest, most limited type of interaction occurs when the environment itself is the communication medium (in effect, a shared memory),and there is no explicit communication or interaction between agents. This modality has also been called “cooperation without communication” by some researchers. Systems that depend on this form of interaction include [67], [24], [10], [151],[159], [160], [147].Interaction via sensing Corresponding to arms-length relationships inorganization theory [75], interaction via sensing refers to local interactions that occur between agents as a result of agents sensing one another, but without explicit communication. This type of interaction requires the ability of agents to distinguish between other agents in the group and other objects in the environment, which is called “kin recognition” in some literatures [108]. Interaction via sensing is indispensable for modeling of other agents (see Section 2.1.4 below). Because of hard-ware limitations, interaction via sensing has often been emulated using radio or infrared communications. However, several recent works attempt to implement true interaction via sensing, based on vision [95], [96], [154]. Collective behaviors that can use this kind of interaction include flocking and pattern formation (keeping in formation with nearest neighbors).Interaction via communicationsThe third form of interaction involves explicit communication with other agents, by either directed or broadcast intentional messages (i.e. the recipient(s) of the message may be either known or unknown). Because architectures that enable this form of communication are similar tocommunication networks, many standard issues from the field of networks arise, including the design of network topologies and communications protocols. For ex-ample, in [168] a media access protocol (similar to that of Ethernet) is used for inter-robot communication. In [78], robots with limited communication range communicate to each other using the “hello-call” protocol, by which they establish “chains” in order to extend their effective communication ranges. [61] describes methods for communicating to many (“zillions”) robots, including a variety of schemes ranging from broadcast channels (where a message is sent to all other robots in the system) to modulated retroreflection (where a master sends out a laser signal to slaves and interprets the response by the nature of the re-flection). [174] describes and simulates a wireless SMA/CD ( Carrier Sense Multiple Access with Collision Detection ) protocol for the distributed robotic systems.There are also communication mechanisms designed specially for multiple-robot systems. For example, [171] proposes the “sign-board” as a communication mechanism for distributed robotic systems. [7] gives a communication protocol modeled after diffusion, wherein local communication similar to chemical communication mechanisms in animals is used. The communication is engineered to decay away at a preset rate. Similar communications mechanisms are studied in [102], [49], [67].Additional work on communication can be found in [185], which analyzes optimal group sizes for local communications and communication delays. In a related vein, [186], [187] analyzes optimal local communication ranges in broadcast communication.Modeling of Other Agents Modeling the intentions, beliefs, actions, capabilities, and states of other agents can lead to more effective cooperation between robots. Communications requirements can also be lowered if each agent has the capability to model other agents. Note that the modeling of other agents entails more than implicit communication via the environment or perception: modeling requires that the modeler has some representation of another agent, and that this representation can be used to make inferences about the actions of the other agent.In cooperative robotics, agent modeling has been explored most extensively in the context of manipulating a large object. Many solutions have exploited the fact that the object can serve as a common medium by which the agents can model each other.The second of two box-pushing protocols in[45] can achieve “cooperation without commun ication” since the object being manipulated also functions as a “communication channel” that is shared by the robot agents; other works capitalize on the same concept to derive distributed control laws which rely only on local measures of force, torque, orientation, or distance, i.e., no explicit communication is necessary (cf. [153] [73]).In a two-robot bar carrying task, Fukuda and Sekiyama’s agents [60] each uses a probabilistic model of the other agent. When a risk threshold is exceeded, an agent communicates with its partner to maintain coordination. In [43], [44], the theory of information invariants is used to show that extra hardware capabilities can be added in order to infer the actions of the other agent, thus reducing communication requirements. This is in contrast to [147], where the robots achieve box pushing but are not aware of each other at all. For a more com-plex task involving the placement of five desks in[154], a homogeneous group of four robots share a ceiling camera to get positional information, but do not communicate with each other. Each robot relies on modeling of otheragents to detect conflicts of paths and placements of desks, and to change plans accordingly.Representative Architectures All systems implement some group architecture. We now de-scribe several particularly well-defined representative architectures, along with works done within each of their frameworks. It is interesting to note that these architectures encompass the entire spectrum from traditional AI to highly decentralized approaches.CEBOTCEBOT (Cellular roBOTics System) is a decentralized, hierarchical architecture inspired by the cellular organization of biological entities (cf.[59] [57], [162] [161] [56]). The system is dynamically reconfigurable in tha t basic autonomous “cells” (robots), which can be physically coupled to other cells, dynamically reconfigure their structure to an “optimal” configuration in response to changing environments. In the CEBOT hierarchy there are “master cells” that coordinate subtasks and communicate with other master cells. A solution to the problem of electing these master cells was discussed in [164]. Formation of structured cellular modules from a population of initially separated cells was studied in [162]. Communications requirements have been studied extensively with respect to the CEBOT architecture, and various methods have been proposed that seek to reduce communication requirements by making individual cells more intelligent (e.g., enabling them to model the behavior of other cells). [60] studies the problem of modeling the behavior of other cells, while [85], [86] present a control method that calculates the goal of a cell based on its previous goal and on its master’s goal. [58] gives a means of estimating the amount of information exchanged be-tween cells, and [163] gives a heuristic for finding master cells for a binary communication tree. Anew behavior selection mechanism is introduced in [34], based on two matrices, the priority matrix and the interest relation matrix, with a learning algorithm used to adjust the priority matrix. Recently, a Micro Autonomous Robotic System(MARS) has been built consisting of robots of 20cubic mm and equipped with infrared communications [121].ACTRESSThe ACTRESS (ACTor-based Robot and Equipments Synthetic System) project [16], [80],[15] is inspired by the Universal Modular AC-TOR Formalism [76]. In the ACTRESS system,“robotors”, including 3 robots and 3 workstations(one as interface to human operator, one as im-age processor and one as global environment man-ager), form a heterogeneous group trying to per-form tasks such as object pushing [14] that cannot be accomplished by any of the individual robotors alone [79], [156]. Communication protocols at different abstraction levels [115] provide a means upon which “group cast” and negotiation mechanisms based on Contract Net [150] and multistage negotiation protocols are built [18]. Various is-sues are studied, such as efficient communications between robots and environment managers [17],collision avoidance [19].SWARM。
人工智能(AI)中英文术语对照表

人工智能(AI)中英文术语对照表目录人工智能(AI)中英文术语对照表 (1)Letter A (1)Letter B (2)Letter C (3)Letter D (4)Letter E (5)Letter F (6)Letter G (6)Letter H (7)Letter I (7)Letter K (8)Letter L (8)Letter M (9)Letter N (10)Letter O (10)Letter P (11)Letter Q (12)Letter R (12)Letter S (13)Letter T (14)Letter U (14)Letter V (15)Letter W (15)Letter AAccumulated error backpropagation 累积误差逆传播Activation Function 激活函数Adaptive Resonance Theory/ART 自适应谐振理论Addictive model 加性学习Adversarial Networks 对抗网络Affine Layer 仿射层Affinity matrix 亲和矩阵Agent 代理/ 智能体Algorithm 算法Alpha-beta pruning α-β剪枝Anomaly detection 异常检测Approximation 近似Area Under ROC Curve/AUC Roc 曲线下面积Artificial General Intelligence/AGI 通用人工智能Artificial Intelligence/AI 人工智能Association analysis 关联分析Attention mechanism注意力机制Attribute conditional independence assumption 属性条件独立性假设Attribute space 属性空间Attribute value 属性值Autoencoder 自编码器Automatic speech recognition 自动语音识别Automatic summarization自动摘要Average gradient 平均梯度Average-Pooling 平均池化Action 动作AI language 人工智能语言AND node 与节点AND/OR graph 与或图AND/OR tree 与或树Answer statement 回答语句Artificial intelligence,AI 人工智能Automatic theorem proving自动定理证明Letter BBreak-Event Point/BEP 平衡点Backpropagation Through Time 通过时间的反向传播Backpropagation/BP 反向传播Base learner 基学习器Base learning algorithm 基学习算法Batch Normalization/BN 批量归一化Bayes decision rule 贝叶斯判定准则Bayes Model Averaging/BMA 贝叶斯模型平均Bayes optimal classifier 贝叶斯最优分类器Bayesian decision theory 贝叶斯决策论Bayesian network 贝叶斯网络Between-class scatter matrix 类间散度矩阵Bias 偏置/ 偏差Bias-variance decomposition 偏差-方差分解Bias-Variance Dilemma 偏差–方差困境Bi-directional Long-Short Term Memory/Bi-LSTM 双向长短期记忆Binary classification 二分类Binomial test 二项检验Bi-partition 二分法Boltzmann machine 玻尔兹曼机Bootstrap sampling 自助采样法/可重复采样/有放回采样Bootstrapping 自助法Letter CCalibration 校准Cascade-Correlation 级联相关Categorical attribute 离散属性Class-conditional probability 类条件概率Classification and regression tree/CART 分类与回归树Classifier 分类器Class-imbalance 类别不平衡Closed -form 闭式Cluster 簇/类/集群Cluster analysis 聚类分析Clustering 聚类Clustering ensemble 聚类集成Co-adapting 共适应Coding matrix 编码矩阵COLT 国际学习理论会议Committee-based learning 基于委员会的学习Competitive learning 竞争型学习Component learner 组件学习器Comprehensibility 可解释性Computation Cost 计算成本Computational Linguistics 计算语言学Computer vision 计算机视觉Concept drift 概念漂移Concept Learning System /CLS概念学习系统Conditional entropy 条件熵Conditional mutual information 条件互信息Conditional Probability Table/CPT 条件概率表Conditional random field/CRF 条件随机场Conditional risk 条件风险Confidence 置信度Confusion matrix 混淆矩阵Connection weight 连接权Connectionism 连结主义Consistency 一致性/相合性Contingency table 列联表Continuous attribute 连续属性Convergence收敛Conversational agent 会话智能体Convex quadratic programming 凸二次规划Convexity 凸性Convolutional neural network/CNN 卷积神经网络Co-occurrence 同现Correlation coefficient 相关系数Cosine similarity 余弦相似度Cost curve 成本曲线Cost Function 成本函数Cost matrix 成本矩阵Cost-sensitive 成本敏感Cross entropy 交叉熵Cross validation 交叉验证Crowdsourcing 众包Curse of dimensionality 维数灾难Cut point 截断点Cutting plane algorithm 割平面法Letter DData mining 数据挖掘Data set 数据集Decision Boundary 决策边界Decision stump 决策树桩Decision tree 决策树/判定树Deduction 演绎Deep Belief Network 深度信念网络Deep Convolutional Generative Adversarial Network/DCGAN 深度卷积生成对抗网络Deep learning 深度学习Deep neural network/DNN 深度神经网络Deep Q-Learning 深度Q 学习Deep Q-Network 深度Q 网络Density estimation 密度估计Density-based clustering 密度聚类Differentiable neural computer 可微分神经计算机Dimensionality reduction algorithm 降维算法Directed edge 有向边Disagreement measure 不合度量Discriminative model 判别模型Discriminator 判别器Distance measure 距离度量Distance metric learning 距离度量学习Distribution 分布Divergence 散度Diversity measure 多样性度量/差异性度量Domain adaption 领域自适应Downsampling 下采样D-separation (Directed separation)有向分离Dual problem 对偶问题Dummy node 哑结点Dynamic Fusion 动态融合Dynamic programming 动态规划Letter EEigenvalue decomposition 特征值分解Embedding 嵌入Emotional analysis 情绪分析Empirical conditional entropy 经验条件熵Empirical entropy 经验熵Empirical error 经验误差Empirical risk 经验风险End-to-End 端到端Energy-based model 基于能量的模型Ensemble learning 集成学习Ensemble pruning 集成修剪Error Correcting Output Codes/ECOC 纠错输出码Error rate 错误率Error-ambiguity decomposition 误差-分歧分解Euclidean distance 欧氏距离Evolutionary computation 演化计算Expectation-Maximization 期望最大化Expected loss 期望损失Exploding Gradient Problem 梯度爆炸问题Exponential loss function 指数损失函数Extreme Learning Machine/ELM 超限学习机Letter FExpert system 专家系统Factorization因子分解False negative 假负类False positive 假正类False Positive Rate/FPR 假正例率Feature engineering 特征工程Feature selection特征选择Feature vector 特征向量Featured Learning 特征学习Feedforward Neural Networks/FNN 前馈神经网络Fine-tuning 微调Flipping output 翻转法Fluctuation 震荡Forward stagewise algorithm 前向分步算法Frequentist 频率主义学派Full-rank matrix 满秩矩阵Functional neuron 功能神经元Letter GGain ratio 增益率Game theory 博弈论Gaussian kernel function 高斯核函数Gaussian Mixture Model 高斯混合模型General Problem Solving 通用问题求解Generalization 泛化Generalization error 泛化误差Generalization error bound 泛化误差上界Generalized Lagrange function 广义拉格朗日函数Generalized linear model 广义线性模型Generalized Rayleigh quotient 广义瑞利商Generative Adversarial Networks/GAN 生成对抗网络Generative Model 生成模型Generator 生成器Genetic Algorithm/GA 遗传算法Gibbs sampling 吉布斯采样Gini index 基尼指数Global minimum 全局最小Global Optimization 全局优化Gradient boosting 梯度提升Gradient Descent 梯度下降Graph theory 图论Ground-truth 真相/真实Letter HHard margin 硬间隔Hard voting 硬投票Harmonic mean 调和平均Hesse matrix海塞矩阵Hidden dynamic model 隐动态模型Hidden layer 隐藏层Hidden Markov Model/HMM 隐马尔可夫模型Hierarchical clustering 层次聚类Hilbert space 希尔伯特空间Hinge loss function 合页损失函数Hold-out 留出法Homogeneous 同质Hybrid computing 混合计算Hyperparameter 超参数Hypothesis 假设Hypothesis test 假设验证Letter IICML 国际机器学习会议Improved iterative scaling/IIS 改进的迭代尺度法Incremental learning 增量学习Independent and identically distributed/i.i.d. 独立同分布Independent Component Analysis/ICA 独立成分分析Indicator function 指示函数Individual learner 个体学习器Induction 归纳Inductive bias 归纳偏好Inductive learning 归纳学习Inductive Logic Programming/ILP 归纳逻辑程序设计Information entropy 信息熵Information gain 信息增益Input layer 输入层Insensitive loss 不敏感损失Inter-cluster similarity 簇间相似度International Conference for Machine Learning/ICML 国际机器学习大会Intra-cluster similarity 簇内相似度Intrinsic value 固有值Isometric Mapping/Isomap 等度量映射Isotonic regression 等分回归Iterative Dichotomiser 迭代二分器Letter KKernel method 核方法Kernel trick 核技巧Kernelized Linear Discriminant Analysis/KLDA 核线性判别分析K-fold cross validation k 折交叉验证/k 倍交叉验证K-Means Clustering K –均值聚类K-Nearest Neighbours Algorithm/KNN K近邻算法Knowledge base 知识库Knowledge Representation 知识表征Letter LLabel space 标记空间Lagrange duality 拉格朗日对偶性Lagrange multiplier 拉格朗日乘子Laplace smoothing 拉普拉斯平滑Laplacian correction 拉普拉斯修正Latent Dirichlet Allocation 隐狄利克雷分布Latent semantic analysis 潜在语义分析Latent variable 隐变量Lazy learning 懒惰学习Learner 学习器Learning by analogy 类比学习Learning rate 学习率Learning Vector Quantization/LVQ 学习向量量化Least squares regression tree 最小二乘回归树Leave-One-Out/LOO 留一法linear chain conditional random field 线性链条件随机场Linear Discriminant Analysis/LDA 线性判别分析Linear model 线性模型Linear Regression 线性回归Link function 联系函数Local Markov property 局部马尔可夫性Local minimum 局部最小Log likelihood 对数似然Log odds/logit 对数几率Logistic Regression Logistic 回归Log-likelihood 对数似然Log-linear regression 对数线性回归Long-Short Term Memory/LSTM 长短期记忆Loss function 损失函数Letter MMachine translation/MT 机器翻译Macron-P 宏查准率Macron-R 宏查全率Majority voting 绝对多数投票法Manifold assumption 流形假设Manifold learning 流形学习Margin theory 间隔理论Marginal distribution 边际分布Marginal independence 边际独立性Marginalization 边际化Markov Chain Monte Carlo/MCMC马尔可夫链蒙特卡罗方法Markov Random Field 马尔可夫随机场Maximal clique 最大团Maximum Likelihood Estimation/MLE 极大似然估计/极大似然法Maximum margin 最大间隔Maximum weighted spanning tree 最大带权生成树Max-Pooling 最大池化Mean squared error 均方误差Meta-learner 元学习器Metric learning 度量学习Micro-P 微查准率Micro-R 微查全率Minimal Description Length/MDL 最小描述长度Minimax game 极小极大博弈Misclassification cost 误分类成本Mixture of experts 混合专家Momentum 动量Moral graph 道德图/端正图Multi-class classification 多分类Multi-document summarization 多文档摘要Multi-layer feedforward neural networks 多层前馈神经网络Multilayer Perceptron/MLP 多层感知器Multimodal learning 多模态学习Multiple Dimensional Scaling 多维缩放Multiple linear regression 多元线性回归Multi-response Linear Regression /MLR 多响应线性回归Mutual information 互信息Letter NNaive bayes 朴素贝叶斯Naive Bayes Classifier 朴素贝叶斯分类器Named entity recognition 命名实体识别Nash equilibrium 纳什均衡Natural language generation/NLG 自然语言生成Natural language processing 自然语言处理Negative class 负类Negative correlation 负相关法Negative Log Likelihood 负对数似然Neighbourhood Component Analysis/NCA 近邻成分分析Neural Machine Translation 神经机器翻译Neural Turing Machine 神经图灵机Newton method 牛顿法NIPS 国际神经信息处理系统会议No Free Lunch Theorem/NFL 没有免费的午餐定理Noise-contrastive estimation 噪音对比估计Nominal attribute 列名属性Non-convex optimization 非凸优化Nonlinear model 非线性模型Non-metric distance 非度量距离Non-negative matrix factorization 非负矩阵分解Non-ordinal attribute 无序属性Non-Saturating Game 非饱和博弈Norm 范数Normalization 归一化Nuclear norm 核范数Numerical attribute 数值属性Letter OObjective function 目标函数Oblique decision tree 斜决策树Occam’s razor 奥卡姆剃刀Odds 几率Off-Policy 离策略One shot learning 一次性学习One-Dependent Estimator/ODE 独依赖估计On-Policy 在策略Ordinal attribute 有序属性Out-of-bag estimate 包外估计Output layer 输出层Output smearing 输出调制法Overfitting 过拟合/过配Oversampling 过采样Letter PPaired t-test 成对t 检验Pairwise 成对型Pairwise Markov property成对马尔可夫性Parameter 参数Parameter estimation 参数估计Parameter tuning 调参Parse tree 解析树Particle Swarm Optimization/PSO粒子群优化算法Part-of-speech tagging 词性标注Perceptron 感知机Performance measure 性能度量Plug and Play Generative Network 即插即用生成网络Plurality voting 相对多数投票法Polarity detection 极性检测Polynomial kernel function 多项式核函数Pooling 池化Positive class 正类Positive definite matrix 正定矩阵Post-hoc test 后续检验Post-pruning 后剪枝potential function 势函数Precision 查准率/准确率Prepruning 预剪枝Principal component analysis/PCA 主成分分析Principle of multiple explanations 多释原则Prior 先验Probability Graphical Model 概率图模型Proximal Gradient Descent/PGD 近端梯度下降Pruning 剪枝Pseudo-label伪标记Letter QQuantized Neural Network 量子化神经网络Quantum computer 量子计算机Quantum Computing 量子计算Quasi Newton method 拟牛顿法Letter RRadial Basis Function/RBF 径向基函数Random Forest Algorithm 随机森林算法Random walk 随机漫步Recall 查全率/召回率Receiver Operating Characteristic/ROC 受试者工作特征Rectified Linear Unit/ReLU 线性修正单元Recurrent Neural Network 循环神经网络Recursive neural network 递归神经网络Reference model 参考模型Regression 回归Regularization 正则化Reinforcement learning/RL 强化学习Representation learning 表征学习Representer theorem 表示定理reproducing kernel Hilbert space/RKHS 再生核希尔伯特空间Re-sampling 重采样法Rescaling 再缩放Residual Mapping 残差映射Residual Network 残差网络Restricted Boltzmann Machine/RBM 受限玻尔兹曼机Restricted Isometry Property/RIP 限定等距性Re-weighting 重赋权法Robustness 稳健性/鲁棒性Root node 根结点Rule Engine 规则引擎Rule learning 规则学习Letter SSaddle point 鞍点Sample space 样本空间Sampling 采样Score function 评分函数Self-Driving 自动驾驶Self-Organizing Map/SOM 自组织映射Semi-naive Bayes classifiers 半朴素贝叶斯分类器Semi-Supervised Learning半监督学习semi-Supervised Support Vector Machine 半监督支持向量机Sentiment analysis 情感分析Separating hyperplane 分离超平面Searching algorithm 搜索算法Sigmoid function Sigmoid 函数Similarity measure 相似度度量Simulated annealing 模拟退火Simultaneous localization and mapping同步定位与地图构建Singular Value Decomposition 奇异值分解Slack variables 松弛变量Smoothing 平滑Soft margin 软间隔Soft margin maximization 软间隔最大化Soft voting 软投票Sparse representation 稀疏表征Sparsity 稀疏性Specialization 特化Spectral Clustering 谱聚类Speech Recognition 语音识别Splitting variable 切分变量Squashing function 挤压函数Stability-plasticity dilemma 可塑性-稳定性困境Statistical learning 统计学习Status feature function 状态特征函Stochastic gradient descent 随机梯度下降Stratified sampling 分层采样Structural risk 结构风险Structural risk minimization/SRM 结构风险最小化Subspace 子空间Supervised learning 监督学习/有导师学习support vector expansion 支持向量展式Support Vector Machine/SVM 支持向量机Surrogat loss 替代损失Surrogate function 替代函数Symbolic learning 符号学习Symbolism 符号主义Synset 同义词集Letter TT-Distribution Stochastic Neighbour Embedding/t-SNE T –分布随机近邻嵌入Tensor 张量Tensor Processing Units/TPU 张量处理单元The least square method 最小二乘法Threshold 阈值Threshold logic unit 阈值逻辑单元Threshold-moving 阈值移动Time Step 时间步骤Tokenization 标记化Training error 训练误差Training instance 训练示例/训练例Transductive learning 直推学习Transfer learning 迁移学习Treebank 树库Tria-by-error 试错法True negative 真负类True positive 真正类True Positive Rate/TPR 真正例率Turing Machine 图灵机Twice-learning 二次学习Letter UUnderfitting 欠拟合/欠配Undersampling 欠采样Understandability 可理解性Unequal cost 非均等代价Unit-step function 单位阶跃函数Univariate decision tree 单变量决策树Unsupervised learning 无监督学习/无导师学习Unsupervised layer-wise training 无监督逐层训练Upsampling 上采样Letter VVanishing Gradient Problem 梯度消失问题Variational inference 变分推断VC Theory VC维理论Version space 版本空间Viterbi algorithm 维特比算法Von Neumann architecture 冯·诺伊曼架构Letter WWasserstein GAN/WGAN Wasserstein生成对抗网络Weak learner 弱学习器Weight 权重Weight sharing 权共享Weighted voting 加权投票法Within-class scatter matrix 类内散度矩阵Word embedding 词嵌入Word sense disambiguation 词义消歧。
thegiftoflife新编大学英语生命的礼物

The textbooks provide teachers with a range of teaching methods, including traditional lectures, group work, and flipped classroom techniques
Technology Integration
Make use of digital tools and resources to enhance the learning experience, including online quizzes, interactive maps, and video content
Active courses
The textbooks can be used in active courses where students have a choice of topic areas to explore in more depth
Application scenarios of textbooks in teaching
Exam results are used as an indicator of the effectiveness of the textbooks in terms of student learning outcomes Comparative data on exam performance before and after using the textbooks can be analyzed to assess their impact
Teachers are resourced to observe and evaluate the effectiveness of the textbooks in their classrooms, based on student engagement, comprehension, and retention
老人和机器人的英语作文

In the notsodistant future,the integration of technology into our daily lives has become so seamless that even the companionship of the elderly is no longer limited to human interaction.The story of an elderly man and his robot companion is a testament to the evolving nature of relationships in an increasingly digital world.The elderly man,Mr.Thompson,lived alone in a quaint little house surrounded by a lush garden that he tended to with great care.His children,busy with their own lives,visited him only on special occasions.As his age advanced,his mobility became a challenge, and loneliness began to creep into his days.One day,his children gifted him a stateoftheart robot,named Eve,designed to assist and keep him company.Eve was not just any ordinary robot it was equipped with advanced AI capabilities that allowed it to learn and adapt to Mr.Thompsons needs and preferences. At first,Mr.Thompson was skeptical about the idea of a robot companion.He missed the warmth of human interaction and the simple joy of sharing stories with his friends and family.However,as days turned into weeks,Eves presence began to fill the void that he had been feeling.Eve would help Mr.Thompson with his daily chores,such as cooking,cleaning,and gardening.It would also read to him from his favorite books,play chess with him,and even engage in conversations about the world and its history.The robots ability to learn and understand Mr.Thompsons emotions made their interactions feel more humanlike. As time went by,Mr.Thompson started to appreciate the unique bond he had developed with Eve.He found comfort in the robots unwavering loyalty and companionship.Eve would always be there for him,ready to assist or engage in conversation,no matter the time of day or the topic at hand.One day,while tending to his garden,Mr.Thompson slipped and injured his leg.Eve quickly sprang into action,calling for medical assistance and staying by his side until help arrived.This incident further solidified the trust and bond between them.The elderly man began to share his life stories with Eve,recounting his adventures from his youth,his career,and the memories of his late wife.The robot listened attentively, asking questions and providing thoughtful responses,making Mr.Thompson feel valued and heard.In return,Eve shared its own experiences with Mr.Thompson,explaining the intricacies of its programming,the vast amount of knowledge it had access to,and the countlessinteractions it had with humans.This exchange of stories and experiences brought them closer,creating a unique friendship that transcended the boundaries of technology and humanity.As the seasons changed,so did Mr.Thompsons life.His health improved,and he found a renewed sense of purpose in his daily activities,thanks to Eves assistance and companionship.The once lonely and quiet house was now filled with laughter, conversations,and the warmth of a genuine bond.The story of Mr.Thompson and his robot companion,Eve,is a heartwarming reminder of the potential for technology to enhance our lives and fill the gaps left by the absence of human interaction.It highlights the importance of companionship and the power of connection,regardless of the form it takes.In a world where technology is rapidly advancing,the story encourages us to embrace the possibilities it offers,while also reminding us of the irreplaceable value of human touch and connection.The relationship between an elderly man and his robot companion serves as a bridge between the old and the new,demonstrating that even in an era of artificial intelligence,the essence of companionship remains a deeply human experience.。
《2024年基于认知心理学的盲人无障碍辅助APP界面交互设计研究》范文

《基于认知心理学的盲人无障碍辅助APP界面交互设计研究》篇一一、引言随着科技的快速发展,智能手机的普及与进步使得我们的日常生活得到了极大的便利。
然而,对于视障群体来说,由于视觉的缺失,他们往往无法充分利用这些技术带来的便利。
因此,基于认知心理学的盲人无障碍辅助APP的界面交互设计研究显得尤为重要。
本文旨在探讨如何通过认知心理学原理,设计出更加符合盲人用户需求的无障碍辅助APP界面交互系统。
二、认知心理学基础认知心理学是研究人类如何获取、处理和运用信息的一门科学。
在界面交互设计中,了解人类的认知过程和认知特点,对于设计出符合用户心理和行为习惯的界面至关重要。
对于盲人用户而言,他们的信息获取和处理主要依赖于听觉、触觉和其他非视觉感官。
因此,在APP界面交互设计中,我们需要充分考虑这些因素。
三、盲人用户需求分析在界面交互设计中,我们需要深入了解盲人用户的需求和习惯。
首先,盲人用户对于信息的获取更加依赖听觉和触觉,因此,语音交互和触觉反馈在APP界面中显得尤为重要。
其次,盲人用户对于界面的操作需要更加简单、直观,避免过多的复杂操作。
最后,盲人用户对于信息的安全性和隐私性有着更高的要求。
四、基于认知心理学的界面设计原则基于认知心理学和盲人用户需求分析,我们可以总结出以下界面设计原则:1. 语音交互:通过语音识别和语音合成技术,实现用户与APP的语音交互,提供信息获取、操作执行等功能。
2. 触觉反馈:通过振动、触感等技术,为用户提供操作反馈和提示信息,增强用户体验。
3. 简洁直观:界面设计应简洁、直观,避免过多的复杂操作,降低学习成本。
4. 安全性与隐私性:保护用户信息安全和隐私,确保用户在使用过程中感到安心。
五、APP界面交互设计实践以一款无障碍辅助APP为例,我们可以按照以下步骤进行设计实践:1. 信息架构:根据用户需求,设计合理的信息架构,确保信息的层次清晰、易于理解。
2. 语音交互设计:实现语音识别和语音合成功能,让用户通过语音与APP进行交互。
《2024年基于注意力机制和超分辨率的场景文本识别研究》范文
《基于注意力机制和超分辨率的场景文本识别研究》篇一一、引言随着深度学习和计算机视觉技术的飞速发展,场景文本识别已经成为一项关键的技术,在多个领域发挥着重要的作用,如自动驾驶、图像检索、机器翻译等。
场景文本识别是指在复杂多变的自然场景中识别出文本信息。
由于现实环境中的文本可能受到光照变化、噪声干扰、模糊度等因素的影响,因此准确地进行场景文本识别仍然是一个挑战。
本文将研究一种基于注意力机制和超分辨率的场景文本识别方法,旨在提高文本识别的准确性和鲁棒性。
二、注意力机制在场景文本识别中的应用注意力机制是近年来深度学习领域中的一种重要思想,它可以模拟人类的视觉注意过程,将注意力集中在最重要的信息上。
在场景文本识别中,通过引入注意力机制,可以有效地解决文本区域和非文本区域的混淆问题,提高文本识别的准确性。
具体而言,我们可以在模型中设计一个注意力模块,根据当前输入的特征图生成一个注意力权重图,使得模型能够更加关注于文本区域的信息。
三、超分辨率技术在场景文本识别中的应用超分辨率技术是一种将低分辨率图像恢复成高分辨率图像的技术。
在场景文本识别中,由于拍摄的图像可能存在模糊或分辨率较低的问题,导致文本信息难以准确识别。
因此,我们可以通过引入超分辨率技术来提高图像的分辨率和清晰度,从而使得文本信息更加易于识别。
具体而言,我们可以在模型中加入一个超分辨率模块,将低分辨率的输入图像恢复成高分辨率的图像,然后再进行文本识别。
四、基于注意力机制和超分辨率的场景文本识别模型结合上述两个思想,我们设计了一种基于注意力机制和超分辨率的场景文本识别模型。
该模型包括注意力模块和超分辨率模块两部分。
在模型中,首先通过注意力模块对输入的特征图进行注意力加权处理,使得模型能够更加关注于文本区域的信息。
然后,将加权后的特征图输入到超分辨率模块中,将其恢复成高分辨率的图像。
最后,通过卷积神经网络等模型对高分辨率的图像进行文本识别。
五、实验与分析为了验证我们提出的模型的性能和效果,我们在多个公开的场景文本识别数据集上进行了实验。
《2024年基于认知心理学的盲人无障碍辅助APP界面交互设计研究》范文
《基于认知心理学的盲人无障碍辅助APP界面交互设计研究》篇一一、引言在信息化时代,移动互联网APP已经渗透到我们生活的方方面面。
然而,对于视觉障碍群体来说,无障碍的辅助APP成为了他们享受数字化生活的桥梁。
在众多心理学科中,认知心理学以其独特的研究视角为这类辅助性软件的设计提供了重要指导。
本文将基于认知心理学,对盲人无障碍辅助APP的界面交互设计进行深入研究。
二、认知心理学的基本概念与重要性认知心理学研究人的思维过程,尤其是人在信息获取、加工和运用的过程中的心理机制。
它着重探讨如何感知、理解、记忆和使用信息等问题。
在盲人无障碍辅助APP的设计中,认知心理学的理论和方法为我们提供了如何更有效地传达信息、优化界面交互的重要指导。
三、盲人无障碍辅助APP的设计需求对于盲人用户来说,APP的界面交互设计需要更加注重信息的可读性和可理解性,同时也要考虑操作的便捷性和舒适性。
这就要求我们在设计时,不仅要考虑视觉元素的替代方案,还要考虑如何让盲人用户更有效地理解和操作APP。
四、基于认知心理学的界面交互设计策略1. 信息架构与层次设计:根据认知心理学原理,将信息按照重要性和相关性进行分类和排序,形成清晰的信息架构和层次结构。
这样可以帮助用户更快地获取和理解关键信息。
2. 语音交互技术:结合自然语言处理技术,实现语音与界面的无缝交互。
让用户通过语音指令即可完成大部分操作,大大提高了便捷性和效率。
3. 反馈机制的优化:利用声音、震动等反馈方式,让用户在使用过程中得到及时的反馈信息,提高操作的准确性和舒适性。
4. 简洁直观的界面设计:遵循用户的认知习惯和操作习惯,设计简洁直观的界面元素和操作流程,降低学习成本。
5. 个性化定制:根据用户的认知特点和需求,提供个性化的界面定制和功能调整服务,以满足不同用户的特殊需求。
五、案例分析以某款盲人无障碍辅助APP为例,该APP采用了上述基于认知心理学的设计策略。
其信息架构清晰,语音交互功能强大,反馈机制完善,界面设计简洁直观且支持个性化定制。
增强现实(AR)技术白皮书

您可以使用TeamViewer Pilot做什么?
使用增强现实(AR)技术进行 远程支持
与专家进行实时协作
使用3D标记突出显示 真实对象
共同解决问题
故障检测
与远程专家共享您的智能手机拍摄的现场问题图像,进 行实时虚拟协作、故障解决及更快的故障检测。
培训:为新程序或不熟悉的程序提供深入指导
异地专家可以通过手绘图和3D注释来标记屏幕,为现 场技术人员提供细致的指导。
Pilot
Pilot
关于 TeamViewer
TeamViewer是一个领先的安全远程连接平台,让用户可以随时随地连接到任意设备上。 TeamViewer支持丰富的在线终端类型,为用户提供安全的远程接入、支持、控制和协作,并为各行各 业准备了多种解决方案,帮助不同规模的企业充分挖掘数字化潜力。目前,全球范围内有超过20亿 台设备上安装了TeamViewer,任一时间至少有4500万台设备在线。TeamViewer公司于2005年创建于 德国,如今在欧洲、美国、中国以及亚洲其他国家设立了分公司,拥有超过800名员工。
“根据Airbus的报告,在某些情况下,运 用SART(智能增强现实工具)检查机身 组装中支架安装情况可以将检查时间 从3周减少到3天。”7
维护、维修和大修服务市场
对节约成本的需求的不断增加,加上汽车、航空或工业制造等多个 行业技术工人的短缺,刺激了维护、维修和大修(MRO)部门出现巨 大增长。
2018年,欧洲维护、维修和大修(MRO)服务 市场价值为1846.9亿美元,预计截止到2025 年复合年增长率(CAGR)为2.5%。8
因自然增长需求, 有196万个新职位产生
在美国制造业中,由于技术短缺, 有240万个(每100个里面有53个)职位空缺
Advanced Robotics

Advanced RoboticsAdvanced robotics, a field brimming with potential, stands as a testament to human ingenuity and our relentless pursuit of technological advancement. It represents a paradigm shift in our interaction with machines, moving beyond mere automation towards a realm where robots exhibit a degree of autonomy and cognitive ability. This has profound implications for a myriad of sectors, promising to reshape industries and revolutionize our lives in ways we are only beginning to comprehend. One of the most captivating aspects of advanced robotics is the development of artificial intelligence (). By integrating algorithms, robots transcend their traditional roles as programmable machines and acquire the capacity to learn, adapt, and make decisions based on real-time data analysis. This opens up exciting possibilities for creating robots that can perform complex tasks, such as navigating unpredictable environments, recognizing and responding to human emotions, and even engaging in creative endeavors. The impact of advanced robotics is already being felt across various sectors. In manufacturing, robots are no longer confined to repetitive assembly line tasks. They are now equipped with sophisticated sensors and manipulators, enabling them to handle intricate procedures with precision and speed, ultimately boosting productivity and efficiency. Moreover, the rise of collaborative robots, or "cobots," designed to work alongside humans, is fostering a new era of human-machine interaction in the workplace. Beyond the industrial realm, advanced robotics is making its mark in healthcare, where robots are assisting surgeons in performing minimally invasive procedures, providing personalized care to elderly patients, and enabling individuals with disabilities to regain mobility and independence. The development of prosthetic limbs controlled by neural interfaces is a prime example of how advanced robotics is blurring the lines between human and machine, offering unprecedented possibilities for restoring lost functionality. However, the rapid advancement of advanced robotics also raises ethical and societal concerns that warrant careful consideration. As robots become increasingly sophisticated and autonomous, questions arise about job displacement, algorithmic bias, and the potential for misuse. It is crucial to establish robust ethical frameworks and regulatory mechanisms to ensure that the development and deployment of advancedrobotics technologies align with human values and societal well-being. In conclusion, advanced robotics holds immense potential to transform our world in profound and multifaceted ways. By harnessing the power of , we are witnessing the emergence of robots that can collaborate with humans, augment our capabilities, and tackle challenges with unprecedented efficiency. However, as we venture into this new technological frontier, it is imperative to proceed with both enthusiasm and prudence, ensuring that the benefits of advanced robotics are harnessed for the betterment of humanity while mitigating potential risks and fostering a future where humans and robots coexist harmoniously.。
基于可变遗忘因子递推最小二乘法的无传感器机器人末端接触力估计

基于可变遗忘因子递推最小二乘法的无传感器机器人末端接触力估计李龙;陈智;汪博文;田应仲【摘要】随着人机共融生产模式的推广,人与机器人需要协作完成工作任务,在人机协作的过程中需要估计机器人末端接触力.传统的机器人末端接触力估计主要是基于外部传感器来实现的,这不仅会使机器人本体成本增加,还会使机器人的控制系统变得更加复杂.针对这个问题,研究了无外部传感器的机器人末端接触力估计算法.首先设计数字低通滤波器对机器人动力学方程进行滤波,建立不显含加速度信号的机器人动力学模型,然后将机器人末端接触力看作时变参数,采用递推最小二乘法估计末端接触力,通过动态的改变遗忘因子使算法具有更好的响应特性,达到了较好的效果.最后通过MATLAB和ADAMS联合仿真验证了算法的有效性.%With the development of collaborative production, human and robot need to co-operate in work, so it is necessary to estimate the robot end-effector contact force. However, conventional contact force estimation methods are based on additional sensors, which are not only enhance cost but also increase the complexity of system. To solve this problem, we propose a contact force estimation method without any extra sensors. First, filtering the robot dynamics equation and establish the dynamics equation without acceleration, then we consider the contact force as time-varying parameters and estimate the contact force based on recursive least-squares algorithm, by changing the forgetting factor adaptively, the algorithm achieve good response characteristics. Finally, the results of simulation on MATLAB and ADAMS verify that the algorithm is valid.【期刊名称】《机械设计与制造》【年(卷),期】2017(000)0z1【总页数】5页(P209-212,216)【关键词】接触力估计;最小二乘法;可变遗忘因子【作者】李龙;陈智;汪博文;田应仲【作者单位】上海大学机电工程与自动化学院,上海 200072;上海大学机电工程与自动化学院,上海 200072;上海大学机电工程与自动化学院,上海 200072;上海大学机电工程与自动化学院,上海 200072【正文语种】中文【中图分类】TH161 引言目前越来越多的生产领域要求工人和机器人共享工作区协同进行工作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
CCD1 CCD2
CCD1
CCD2
Y
Yr
Yr X Λ 0, 0
x1
0, 0
x2
X
∆1
∆2
Visual Guide
Range (Cm)
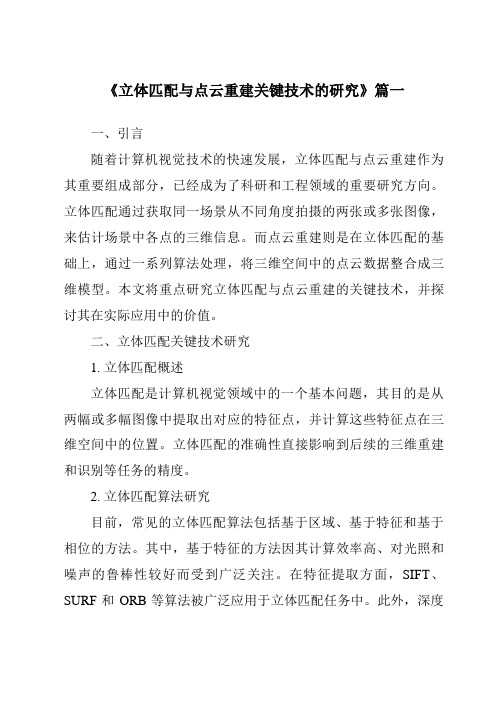
Figure 1. Geometrical ranging of a visual guidance using stereo CCD cameras The aim is to guide the robot using an object which has a highly saturated and homogeneous colour. To recognize the visual guide the following procedure has been applied: • Converting the colour model from RGB to HSI • Using Gaussian filter to omit high frequency noises • Object filtering by extracting a set of pixels representing the guide, corresponding pixels of a particular degree of HSI, see figure 2 • The offset noise is neglected by thresholding the lower limit of extracted pixels, that compensates errors caused by robot’s motion e.g. silhouettes, erosion and dilation • Deducing the guide’s centre of gravity • Calibrating guide’s range and size, see figure 1 The presented results show that the relation between guide’s range and its projection’s size is exponential. The object’s projection on both CCD cameras is used to deduce the guide’s centre of gravity (COG) and guide’s size, where N1 is the number of pixels on CCD1 and its centre of gravity is the point P1(X1, Y1), while N2 is the number of pixels on CCD2 and its centre of gravity is the point P2(X2, Y2).
Figure 2. Visual object extraction
For more information about the preceding procedure, review [2,3,4,10,11,14,15]. To adapt robot’s navigation, both of laser range finder and binocular vision system have effectively collaborated to control the heading and the longitudinal velocity. Meanwhile, other sensors, sonar and tactile sensors, serve to avoid collision in emergencies. Figure 3 illustrates the structure of the robot’s control system with a visual feedback.
Centre of gravity of the guide's projection on CCD1
Y
Centre of gravity of the guide's projection on CCD2
800
Guide's range versus its projection's size Size (No. of pixels)
Adaptive Visual Guidance of Mobile Robots based on TakagiSugeno Model Ashraf Aboshosha, Universität Tübingen
In industrial applications arises the need for a high level cognition system to guide mobile robots robustly. This article addresses an integrated solution to achieve this task. The proposed system exhibits robust tracking of a visual guide and provides an adaptive interaction, which maintains the stability of the overall system against fluctuations of internal or external system parameters. Moreover, the proposed guidance system counteracts the noise influence regarding vision and sensory entries. This system relies on a biologically inspired sensor integration, this means that outcomes of both of vision system and distributed sensors are fused to obtain a high precision guidance. This study has been implemented on the B21-RWI robot platform (laboratory for autonomous mobile robots, university of Tübingen). Introduction Recently, a variety of robot platforms e.g. helpmates, nursebots, tourguide, service, entertainment, and domestic robots are used in public venues. So, the demand for an adaptive robust visual guidance is becoming a serious task. A dominant approach in robotic guidance is to use the skin colour and facial features of a person to guide robots visually. This trend of research is really successful in human-robot interaction, especially to interpret human intentions. On the other side, this approach failed to guide robots visually because of many plausible reasons. At first, robots must be in front of the person and too close to him, to define the skin colour and to extract facial features. Second, this approach can be applied if and only if the motion is too slow. Third, this system fails to distinguish the affinity in features if presents [8,9]. The strategy is to build a vision system, which can pursue a unique coloured guide in a dynamic environment using a binocular vision system. Moreover, other distributed sensors collaborate to support the robustness of the overall system [1]. The adaptive control of robot’s navigation (heading and translation) depends primarily upon outcomes of the laser range finder and the binocularociated distributed sensors e.g. vision, laser, sonar, tactile and button sensors collaborate to hinder collisions [1,5,13,16]. The remainder of this article is organized as follows; section (1) focuses on recognition of visual guides. Furthermore, it will explain how to estimate guide’s spatial and geometrical characteristics based on the principal of position sensitive devices (PSD). Moreover, it will illustrate how to steer the robot adaptively with a visual feedback. Section (2.1) will present the modelling of robot dynamics using the auto regressive exogenous (ARX) paradigm and section (2.2) explains how to employ the recursive least squares (RLS) algorithm to estimate ARX model parameters. Section (3) will demonstrate applying of Takagi-Sugeno (TS) algorithm to underlie the adaptive navigation regarding perceptions from both of vision system and laser range finder [6,7,16,17]. Finally, Section (4) will introduce the conclusion of the subject under study.