Title Object Recognition using Random Image-lines
Rapid Object Detection using a Boosted Cascade of Simple Features

A CCEPTED C ONFERENCE ON C OMPUTER V ISION AND P ATTERN R ECOGNITION2001 Rapid Object Detection using a Boosted Cascade of SimpleFeaturesPaul Viola Michael Jones viola@ mjones@ Mitsubishi Electric Research Labs Compaq CRL 201Broadway,8th FL One Cambridge CenterCambridge,MA02139Cambridge,MA02142AbstractThis paper describes a machine learning approach for vi-sual object detection which is capable of processing images extremely rapidly and achieving high detection rates.This work is distinguished by three key contributions.Thefirst is the introduction of a new image representation called the “Integral Image”which allows the features used by our de-tector to be computed very quickly.The second is a learning algorithm,based on AdaBoost,which selects a small num-ber of critical visual features from a larger set and yields extremely efficient classifiers[6].The third contribution is a method for combining increasingly more complex classi-fiers in a“cascade”which allows background regions of the image to be quickly discarded while spending more compu-tation on promising object-like regions.The cascade can be viewed as an object specific focus-of-attention mechanism which unlike previous approaches provides statistical guar-antees that discarded regions are unlikely to contain the ob-ject of interest.In the domain of face detection the system yields detection rates comparable to the best previous ed in real-time applications,the detector runs at 15frames per second without resorting to image differenc-ing or skin color detection.1.IntroductionThis paper brings together new algorithms and insights to construct a framework for robust and extremely rapid object detection.This framework is demonstrated on,and in part motivated by,the task of face detection.Toward this end we have constructed a frontal face detection system which achieves detection and false positive rates which are equiv-alent to the best published results[16,12,15,11,1].This face detection system is most clearly distinguished from previous approaches in its ability to detect faces extremely rapidly.Operating on384by288pixel images,faces are de-tected at15frames per second on a conventional700MHz Intel Pentium III.In other face detection systems,auxiliary information,such as image differences in video sequences, or pixel color in color images,have been used to achieve high frame rates.Our system achieves high frame rates working only with the information present in a single grey scale image.These alternative sources of information can also be integrated with our system to achieve even higher frame rates.There are three main contributions of our object detec-tion framework.We will introduce each of these ideas briefly below and then describe them in detail in subsequent sections.Thefirst contribution of this paper is a new image repre-sentation called an integral image that allows for very fast feature evaluation.Motivated in part by the work of Papa-georgiou et al.our detection system does not work directly with image intensities[10].Like these authors we use a set of features which are reminiscent of Haar Basis func-tions(though we will also use relatedfilters which are more complex than Haarfilters).In order to compute these fea-tures very rapidly at many scales we introduce the integral image representation for images.The integral image can be computed from an image using a few operations per pixel.Once computed,any one of these Harr-like features can be computed at any scale or location in constant time.The second contribution of this paper is a method for constructing a classifier by selecting a small number of im-portant features using AdaBoost[6].Within any image sub-window the total number of Harr-like features is very large, far larger than the number of pixels.In order to ensure fast classification,the learning process must exclude a large ma-jority of the available features,and focus on a small set of critical features.Motivated by the work of Tieu and Viola, feature selection is achieved through a simple modification of the AdaBoost procedure:the weak learner is constrained so that each weak classifier returned can depend on only a 1single feature[2].As a result each stage of the boosting process,which selects a new weak classifier,can be viewed as a feature selection process.AdaBoost provides an effec-tive learning algorithm and strong bounds on generalization performance[13,9,10].The third major contribution of this paper is a method for combining successively more complex classifiers in a cascade structure which dramatically increases the speed of the detector by focusing attention on promising regions of the image.The notion behind focus of attention approaches is that it is often possible to rapidly determine where in an image an object might occur[17,8,1].More complex pro-cessing is reserved only for these promising regions.The key measure of such an approach is the“false negative”rate of the attentional process.It must be the case that all,or almost all,object instances are selected by the attentional filter.We will describe a process for training an extremely sim-ple and efficient classifier which can be used as a“super-vised”focus of attention operator.The term supervised refers to the fact that the attentional operator is trained to detect examples of a particular class.In the domain of face detection it is possible to achieve fewer than1%false neg-atives and40%false positives using a classifier constructed from two Harr-like features.The effect of thisfilter is to reduce by over one half the number of locations where the final detector must be evaluated.Those sub-windows which are not rejected by the initial classifier are processed by a sequence of classifiers,each slightly more complex than the last.If any classifier rejects the sub-window,no further processing is performed.The structure of the cascaded detection process is essentially that of a degenerate decision tree,and as such is related to the work of Geman and colleagues[1,4].An extremely fast face detector will have broad prac-tical applications.These include user interfaces,image databases,and teleconferencing.In applications where rapid frame-rates are not necessary,our system will allow for significant additional post-processing and analysis.In addition our system can be implemented on a wide range of small low power devices,including hand-helds and embed-ded processors.In our lab we have implemented this face detector on the Compaq iPaq handheld and have achieved detection at two frames per second(this device has a low power200mips Strong Arm processor which lacksfloating point hardware).The remainder of the paper describes our contributions and a number of experimental results,including a detailed description of our experimental methodology.Discussion of closely related work takes place at the end of each sec-tion.2.FeaturesOur object detection procedure classifies images based on the value of simple features.There are many motivationsFigure1:Example rectangle features shown relative to the enclosing detection window.The sum of the pixels which lie within the white rectangles are subtracted from the sum of pixels in the grey rectangles.Two-rectangle features are shown in(A)and(B).Figure(C)shows a three-rectangle feature,and(D)a four-rectangle feature.for using features rather than the pixels directly.The most common reason is that features can act to encode ad-hoc domain knowledge that is difficult to learn using afinite quantity of training data.For this system there is also a second critical motivation for features:the feature based system operates much faster than a pixel-based system.The simple features used are reminiscent of Haar basis functions which have been used by Papageorgiou et al.[10]. More specifically,we use three kinds of features.The value of a two-rectangle feature is the difference between the sum of the pixels within two rectangular regions.The regions have the same size and shape and are horizontally or ver-tically adjacent(see Figure1).A three-rectangle feature computes the sum within two outside rectangles subtracted from the sum in a center rectangle.Finally a four-rectangle feature computes the difference between diagonal pairs of rectangles.Given that the base resolution of the detector is24x24, the exhaustive set of rectangle features is quite large,over 180,000.Note that unlike the Haar basis,the set of rectan-gle features is overcomplete1.2.1.Integral ImageRectangle features can be computed very rapidly using an intermediate representation for the image which we call the integral image.2The integral image at location contains the sum of the pixels above and to the left of,inclusive:Figure2:The sum of the pixels within rectangle can be computed with four array references.The value of the inte-gral image at location1is the sum of the pixels in rectangle .The value at location2is,at location3is, and at location4is.The sum within can be computed as.where is the integral image and is the origi-nal ing the following pair of recurrences:(1)(2) (where is the cumulative row sum,, and)the integral image can be computed in one pass over the original image.Using the integral image any rectangular sum can be computed in four array references(see Figure2).Clearly the difference between two rectangular sums can be com-puted in eight references.Since the two-rectangle features defined above involve adjacent rectangular sums they can be computed in six array references,eight in the case of the three-rectangle features,and nine for four-rectangle fea-tures.2.2.Feature DiscussionRectangle features are somewhat primitive when compared with alternatives such as steerablefilters[5,7].Steerablefil-ters,and their relatives,are excellent for the detailed analy-sis of boundaries,image compression,and texture analysis. In contrast rectangle features,while sensitive to the pres-ence of edges,bars,and other simple image structure,are quite coarse.Unlike steerablefilters the only orientations available are vertical,horizontal,and diagonal.The set of rectangle features do however provide a rich image repre-sentation which supports effective learning.In conjunction with the integral image,the efficiency of the rectangle fea-ture set provides ample compensation for their limitedflex-ibility.3.Learning Classification Functions Given a feature set and a training set of positive and neg-ative images,any number of machine learning approachescould be used to learn a classification function.In our sys-tem a variant of AdaBoost is used both to select a small set of features and train the classifier[6].In its original form, the AdaBoost learning algorithm is used to boost the clas-sification performance of a simple(sometimes called weak) learning algorithm.There are a number of formal guaran-tees provided by the AdaBoost learning procedure.Freund and Schapire proved that the training error of the strong classifier approaches zero exponentially in the number of rounds.More importantly a number of results were later proved about generalization performance[14].The key insight is that generalization performance is related to the margin of the examples,and that AdaBoost achieves large margins rapidly.Recall that there are over180,000rectangle features as-sociated with each image sub-window,a number far larger than the number of pixels.Even though each feature can be computed very efficiently,computing the complete set is prohibitively expensive.Our hypothesis,which is borne out by experiment,is that a very small number of these features can be combined to form an effective classifier.The main challenge is tofind these features.In support of this goal,the weak learning algorithm is designed to select the single rectangle feature which best separates the positive and negative examples(this is similar to the approach of[2]in the domain of image database re-trieval).For each feature,the weak learner determines the optimal threshold classification function,such that the min-imum number of examples are misclassified.A weak clas-sifier thus consists of a feature,a threshold anda parity indicating the direction of the inequality sign:ifotherwiseHere is a24x24pixel sub-window of an image.See Ta-ble1for a summary of the boosting process.In practice no single feature can perform the classifica-tion task with low error.Features which are selected in early rounds of the boosting process had error rates between0.1 and0.3.Features selected in later rounds,as the task be-comes more difficult,yield error rates between0.4and0.5.3.1.Learning DiscussionMany general feature selection procedures have been pro-posed(see chapter8of[18]for a review).Ourfinal appli-cation demanded a very aggressive approach which would discard the vast majority of features.For a similar recogni-tion problem Papageorgiou et al.proposed a scheme for fea-ture selection based on feature variance[10].They demon-strated good results selecting37features out of a total1734 features.Roth et al.propose a feature selection process based on the Winnow exponential perceptron learning rule[11].The Winnow learning process converges to a solution where many of these weights are zero.Nevertheless a very large3Given example images wherefor negative and positive examples respec-tively.Initialize weights for respec-tively,where and are the number of negatives andpositives respectively.For:1.Normalize the weights,.Thefinal strong classifier is:Table1:The AdaBoost algorithm for classifier learn-ing.Each round of boosting selects one feature from the 180,000potential features.number of features are retained(perhaps a few hundred or thousand).3.2.Learning ResultsWhile details on the training and performance of thefinal system are presented in Section5,several simple results merit discussion.Initial experiments demonstrated that a frontal face classifier constructed from200features yields a detection rate of95%with a false positive rate of1in 14084.These results are compelling,but not sufficient for many real-world tasks.In terms of computation,this clas-sifier is probably faster than any other published system, requiring0.7seconds to scan an384by288pixel image. Unfortunately,the most straightforward technique for im-proving detection performance,adding features to the clas-sifier,directly increases computation time.For the task of face detection,the initial rectangle fea-tures selected by AdaBoost are meaningful and easily inter-preted.Thefirst feature selected seems to focus on the prop-erty that the region of the eyes is often darker than theregionFigure3:Thefirst and second features selected by Ad-aBoost.The two features are shown in the top row and then overlayed on a typical training face in the bottom row.The first feature measures the difference in intensity between the region of the eyes and a region across the upper cheeks.The feature capitalizes on the observation that the eye region is often darker than the cheeks.The second feature compares the intensities in the eye regions to the intensity across the bridge of the nose.of the nose and cheeks(see Figure3).This feature is rel-atively large in comparison with the detection sub-window, and should be somewhat insensitive to size and location of the face.The second feature selected relies on the property that the eyes are darker than the bridge of the nose.4.The Attentional CascadeThis section describes an algorithm for constructing a cas-cade of classifiers which achieves increased detection per-formance while radically reducing computation time.The key insight is that smaller,and therefore more efficient, boosted classifiers can be constructed which reject many of the negative sub-windows while detecting almost all posi-tive instances(i.e.the threshold of a boosted classifier can be adjusted so that the false negative rate is close to zero).Simpler classifiers are used to reject the majority of sub-windows before more complex classifiers are called upon to achieve low false positive rates.The overall form of the detection process is that of a de-generate decision tree,what we call a“cascade”(see Fig-ure4).A positive result from thefirst classifier triggers the evaluation of a second classifier which has also been ad-justed to achieve very high detection rates.A positive result from the second classifier triggers a third classifier,and so on.A negative outcome at any point leads to the immediate rejection of the sub-window.Stages in the cascade are constructed by training clas-sifiers using AdaBoost and then adjusting the threshold to minimize false negatives.Note that the default AdaBoost threshold is designed to yield a low error rate on the train-ing data.In general a lower threshold yields higher detec-4Reject Sub−windowFigure4:Schematic depiction of a the detection cascade.A series of classifiers are applied to every sub-window.The initial classifier eliminates a large number of negative exam-ples with very little processing.Subsequent layers eliminate additional negatives but require additional computation.Af-ter several stages of processing the number of sub-windows have been reduced radically.Further processing can take any form such as additional stages of the cascade(as in our detection system)or an alternative detection system.tion rates and higher false positive rates.For example an excellentfirst stage classifier can be con-structed from a two-feature strong classifier by reducing the threshold to minimize false negatives.Measured against a validation training set,the threshold can be adjusted to de-tect100%of the faces with a false positive rate of40%.See Figure3for a description of the two features used in this classifier.Computation of the two feature classifier amounts to about60microprocessor instructions.It seems hard to imagine that any simplerfilter could achieve higher rejec-tion rates.By comparison,scanning a simple image tem-plate,or a single layer perceptron,would require at least20 times as many operations per sub-window.The structure of the cascade reflects the fact that within any single image an overwhelming majority of sub-windows are negative.As such,the cascade attempts to re-ject as many negatives as possible at the earliest stage pos-sible.While a positive instance will trigger the evaluation of every classifier in the cascade,this is an exceedingly rare event.Much like a decision tree,subsequent classifiers are trained using those examples which pass through all the previous stages.As a result,the second classifier faces a more difficult task than thefirst.The examples which make it through thefirst stage are“harder”than typical exam-ples.The more difficult examples faced by deeper classi-fiers push the entire receiver operating characteristic(ROC) curve downward.At a given detection rate,deeper classi-fiers have correspondingly higher false positive rates.4.1.Training a Cascade of ClassifiersThe cascade training process involves two types of trade-offs.In most cases classifiers with more features will achieve higher detection rates and lower false positive rates. At the same time classifiers with more features require more time to compute.In principle one could define an optimiza-tion framework in which:i)the number of classifier stages, ii)the number of features in each stage,and iii)the thresh-old of each stage,are traded off in order to minimize the expected number of evaluated features.Unfortunatelyfind-ing this optimum is a tremendously difficult problem.In practice a very simple framework is used to produce an effective classifier which is highly efficient.Each stage in the cascade reduces the false positive rate and decreases the detection rate.A target is selected for the minimum reduction in false positives and the maximum decrease in detection.Each stage is trained by adding features until the target detection and false positives rates are met(these rates are determined by testing the detector on a validation set). Stages are added until the overall target for false positive and detection rate is met.4.2.Detector Cascade DiscussionThe complete face detection cascade has38stages with over 6000features.Nevertheless the cascade structure results in fast average detection times.On a difficult dataset,con-taining507faces and75million sub-windows,faces are detected using an average of10feature evaluations per sub-window.In comparison,this system is about15times faster than an implementation of the detection system constructed by Rowley et al.3[12]A notion similar to the cascade appears in the face de-tection system described by Rowley et al.in which two de-tection networks are used[12].Rowley et ed a faster yet less accurate network to prescreen the image in order to find candidate regions for a slower more accurate network. Though it is difficult to determine exactly,it appears that Rowley et al.’s two network face system is the fastest exist-ing face detector.4The structure of the cascaded detection process is es-sentially that of a degenerate decision tree,and as such is related to the work of Amit and Geman[1].Unlike tech-niques which use afixed detector,Amit and Geman propose an alternative point of view where unusual co-occurrences of simple image features are used to trigger the evaluation of a more complex detection process.In this way the full detection process need not be evaluated at many of the po-tential image locations and scales.While this basic insightis very valuable,in their implementation it is necessary to first evaluate some feature detector at every location.These features are then grouped tofind unusual co-occurrences.In practice,since the form of our detector and the features that it uses are extremely efficient,the amortized cost of evalu-ating our detector at every scale and location is much faster thanfinding and grouping edges throughout the image.In recent work Fleuret and Geman have presented a face detection technique which relies on a“chain”of tests in or-der to signify the presence of a face at a particular scale and location[4].The image properties measured by Fleuret and Geman,disjunctions offine scale edges,are quite different than rectangle features which are simple,exist at all scales, and are somewhat interpretable.The two approaches also differ radically in their learning philosophy.The motivation for Fleuret and Geman’s learning process is density estima-tion and density discrimination,while our detector is purely discriminative.Finally the false positive rate of Fleuret and Geman’s approach appears to be higher than that of previ-ous approaches like Rowley et al.and this approach.Un-fortunately the paper does not report quantitative results of this kind.The included example images each have between 2and10false positives.5ResultsA38layer cascaded classifier was trained to detect frontal upright faces.To train the detector,a set of face and non-face training images were used.The face training set con-sisted of4916hand labeled faces scaled and aligned to a base resolution of24by24pixels.The faces were ex-tracted from images downloaded during a random crawl of the world wide web.Some typical face examples are shown in Figure5.The non-face subwindows used to train the detector come from9544images which were manually in-spected and found to not contain any faces.There are about 350million subwindows within these non-face images.The number of features in thefirstfive layers of the de-tector is1,10,25,25and50features respectively.The remaining layers have increasingly more features.The total number of features in all layers is6061.Each classifier in the cascade was trained with the4916 training faces(plus their vertical mirror images for a total of9832training faces)and10,000non-face sub-windows (also of size24by24pixels)using the Adaboost training procedure.For the initial one feature classifier,the non-face training examples were collected by selecting random sub-windows from a set of9544images which did not con-tain faces.The non-face examples used to train subsequent layers were obtained by scanning the partial cascade across the non-face images and collecting false positives.A max-imum of10000such non-face sub-windows were collected for each layer.Speed of the FinalDetector Figure5:Example of frontal upright face images used for training.The speed of the cascaded detector is directly related to the number of features evaluated per scanned sub-window. Evaluated on the MIT+CMU test set[12],an average of10 features out of a total of6061are evaluated per sub-window. This is possible because a large majority of sub-windows are rejected by thefirst or second layer in the cascade.On a700Mhz Pentium III processor,the face detector can pro-cess a384by288pixel image in about.067seconds(us-ing a starting scale of1.25and a step size of1.5described below).This is roughly15times faster than the Rowley-Baluja-Kanade detector[12]and about600times faster than the Schneiderman-Kanade detector[15].Image ProcessingAll example sub-windows used for training were vari-ance normalized to minimize the effect of different light-ing conditions.Normalization is therefore necessary during detection as well.The variance of an image sub-window can be computed quickly using a pair of integral images. Recall thatDetector False detections31659576.1%91.4%92.1%93.9%81.1%92.1%93.1%93.7%83.2%--90.1%------(94.8%)-Table2:Detection rates for various numbers of false positives on the MIT+CMU test set containing130images and507 faces.scale with the same cost.Good results were obtained using a set of scales a factor of1.25apart.The detector is also scanned across location.Subsequent locations are obtained by shifting the window some number of pixels.This shifting process is affected by the scale of the detector:if the current scale is the window is shifted by,where is the rounding operation.The choice of affects both the speed of the detector as well as accuracy.The results we present are for. We can achieve a significant speedup by settingwith only a slight decrease in accuracy.Integration of Multiple DetectionsSince thefinal detector is insensitive to small changes in translation and scale,multiple detections will usually occur around each face in a scanned image.The same is often true of some types of false positives.In practice it often makes sense to return onefinal detection per face.Toward this end it is useful to postprocess the detected sub-windows in order to combine overlapping detections into a single detection.In these experiments detections are combined in a very simple fashion.The set of detections arefirst partitioned into disjoint subsets.Two detections are in the same subset if their bounding regions overlap.Each partition yields a singlefinal detection.The corners of thefinal bounding region are the average of the corners of all detections in the set.Experiments on a Real-World Test SetWe tested our system on the MIT+CMU frontal face test set[12].This set consists of130images with507labeled frontal faces.A ROC curve showing the performance of our detector on this test set is shown in Figure6.To create the ROC curve the threshold of thefinal layer classifier is ad-justed from to.Adjusting the threshold towill yield a detection rate of0.0and a false positive rate of0.0.Adjusting the threshold to,however,increases both the detection rate and false positive rate,but only to a certain point.Neither rate can be higher than the rate of the detection cascade minus thefinal layer.In effect,a thresh-old of is equivalent to removing that layer.Further increasing the detection and false positive rates requires de-creasing the threshold of the next classifier in the cascade.Thus,in order to construct a complete ROC curve,classifier layers are removed.We use the number of false positives as opposed to the rate of false positives for the x-axis of the ROC curve to facilitate comparison with other systems.To compute the false positive rate,simply divide by the total number of sub-windows scanned.In our experiments,the number of sub-windows scanned is75,081,800.Unfortunately,most previous published results on face detection have only included a single operating regime(i.e.single point on the ROC curve).To make comparison with our detector easier we have listed our detection rate for the false positive rates reported by the other systems.Table2 lists the detection rate for various numbers of false detec-tions for our system as well as other published systems.For the Rowley-Baluja-Kanade results[12],a number of differ-ent versions of their detector were tested yielding a number of different results they are all listed in under the same head-ing.For the Roth-Yang-Ahuja detector[11],they reported their result on the MIT+CMU test set minus5images con-taining line drawn faces removed.Figure7shows the output of our face detector on some test images from the MIT+CMU test set.A simple voting scheme to further improve resultsIn table2we also show results from running three de-tectors(the38layer one described above plus two similarly trained detectors)and outputting the majority vote of the three detectors.This improves the detection rate as well as eliminating more false positives.The improvement would be greater if the detectors were more independent.The cor-relation of their errors results in a modest improvement over the best single detector.6ConclusionsWe have presented an approach for object detection which minimizes computation time while achieving high detection accuracy.The approach was used to construct a face de-tection system which is approximately15faster than any previous approach.This paper brings together new algorithms,representa-tions,and insights which are quite generic and may well 7。
基于Kinect的3D人脸识别(1)

基于kinect的3D人脸识别技术摘要在2D人脸识别技术不断发展的今天,深度学习的出现让2D人脸识别技术的准确率已经达到了97.54%,2D技术的发展空间越来越小。
而随着3D技术也越来越成熟,将3D技术融合到人脸识别技术中是一种新的发展方向。
而现阶段,kinect这种体积轻巧,价格便宜,捕获3D数据效率高而且分辨率不低的设备成了许多研究人员的研究对象。
在本文中我们也利用了kinect设备完成了一个基于kinect的3D人脸识别研究的过程。
首先通过kinect设备采集了一批数据,接着实现了一种基于熵图和显著性图,利用HOG特征算子,和随机森林分类器和SVM分类器进行识别的算法系统。
通过我们的实验,利用随机森林分类器实现的分类器准确率只有73%,而利用SVM分类器达到的准确率有83.19%。
但是因为采集数据的范围小,以及算法的不完善性,我们的系统还有很大的提升空间。
关键词:kinect,RGB-D,显著性,熵图,随机森林,SVM,人脸识别AbstractWith the fast development of the face recognition based 2D data, the deep learning technology makes the accuracy of the face recognition based 2D data have reached in 97.54% and the development of the 2D technology in face recognition has reached the bottleneck. However, with the 3D technology becoming more and more mature, it is a new development direction to fuse the 3D technology into face recognitiontechnology. In the meanwhile, the Kinect which is portable, inexpensive and has high capturing rate and moderate definition becomes the research object of many researchers.In our paper, we used the Kinect equipment to finish a project which is about face recognition based 3D data. First of all, we collected enough RGB-D data using Kinect. Then we implemented the algorithm system which is based the entropy map and the visual saliency map, gets the feature vector using the HOG descriptor and using random decision forest and support vector machine to classify the data.The result of our experiment is not very well. The accuracy of the recognition with random decision forest classifier reaches only 73%. However, the accuracy of the recognition with support vector machine reaches 83.19%. Because of the small scale in the database and the imperfect algorithm, our system can still make great progress.Key words:Kinect, RGB-D, salience, entropy, RDF, SVM, face recognition1,绪论1.1研究背景随着人们对人工智能,机器学习算法的研究的不断深入,其分支领域中的计算机视觉中的人脸识别技术也得到了充分的发展和巨大的进步。
目标检测参考文献
目标检测参考文献目标检测是计算机视觉领域中的一个重要研究方向,主要目标是在图像或视频中识别和定位特定目标物体。
近年来,随着深度学习技术的兴起,目标检测取得了显著的进展,在许多实际应用中得到了广泛应用。
以下是一些关于目标检测的重要参考文献。
1. Viola, P., & Jones, M. (2001). Rapid Object Detection using a Boosted Cascade of Simple Features. In Proceedings of the 2001 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR) (Vol.1, pp. I-511-I-518).这篇经典论文提出了基于级联AdaBoost算法的人脸检测方法,该方法将输入图像的特征与级联分类器相结合,实现了高效的目标检测。
这种方法为后续的目标检测方法奠定了基础,并被广泛应用于人脸检测等领域。
2. Dalal, N., & Triggs, B. (2005). Histograms of Oriented Gradients for Human Detection. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR) (Vol.1, pp. 886-893).这篇论文提出了一种基于梯度方向直方图的特征表示方法,称为“方向梯度直方图”(Histograms of Oriented Gradients,简称HOG),并将其应用于行人检测。
HOG特征具有旋转不变性和局部对比度归一化等优点,在目标检测中取得了显著的性能提升。
albumentations 随机亮度对比度饱和度
albumentations 随机亮度对比度饱和度1. 简介albumentations 是一个流行的图像增强库,它提供了各种用于数据增强的函数,其中包括随机亮度、对比度和饱和度。
这些功能可以帮助数据科学家和机器学习工程师在训练图像分类、目标检测和图像分割模型时改善模型的性能。
2. 随机亮度随机亮度是指在训练过程中对图像的亮度进行随机的调整。
这个功能可以模拟不同环境下的光照条件,从而使模型对光照条件的变化更加鲁棒。
在 albumentations 中,可以通过调用`RandomBrightnessContrast` 函数来实现随机亮度的调整。
3. 随机对比度随机对比度是指在训练过程中对图像的对比度进行随机的调整。
对比度是指图像中颜色的变化程度,通过调整对比度可以使图像的细节更加清晰或者更加模糊。
在 albumentations 中,可以通过调用`RandomBrightnessContrast` 函数来实现随机对比度的调整。
4. 随机饱和度随机饱和度是指在训练过程中对图像的饱和度进行随机的调整。
饱和度是指图像的颜色的鲜艳程度,通过调整饱和度可以使图像的颜色更加鲜艳或者更加柔和。
在 albumentations 中,可以通过调用`RandomSaturation` 函数来实现随机饱和度的调整。
5. 应用场景albumentations 中的随机亮度、对比度和饱和度调整函数可以广泛应用于图像分类、目标检测和图像分割等任务中。
它们可以帮助模型适应不同的光照条件、颜色变化,并提高模型的泛化能力和鲁棒性。
6. 总结albumentations 提供了丰富的图像增强函数,包括随机亮度、对比度和饱和度调整,可以帮助数据科学家和机器学习工程师改善图像分类、目标检测和图像分割模型的性能。
随机亮度、对比度和饱和度调整可以模拟不同的光照条件、颜色变化,提高模型的泛化能力和鲁棒性。
在实际应用中,可以根据任务的特点和需求,灵活选择合适的增强函数,从而提高模型的性能和效果。
命名实体识别综述

命名实体识别综述陈基【摘要】互联网的普及和发展,信息资源得到极大的丰富,同时也造成信息过载的问题。
人们迫切需要快速准确地获取信息的技术方法,信息抽取技术就应运而生。
命名实体识别作为信息抽取的一个子任务被提出,受到国内外学者的重视,并进行一系列研究。
探讨命名实体的概念和意义,对现有的命名实体识别研究进行总结归纳。
%With the growing popularity and development of the Internet, information resources have been greatly enriched, but also result in informa-tion overload problem. For people's need of technical methodthat can find out information fast and accurately, information extraction technology is brought into being. Information extraction is presented as a subtask; named entity recognition is attached great importance. A series of studies are doing by scholars. Discusses the concept and significance of named entity, and gives a summary to named entity recognition.【期刊名称】《现代计算机(专业版)》【年(卷),期】2016(000)003【总页数】3页(P24-26)【关键词】命名实体;条件随机场;信息抽取;评价指标【作者】陈基【作者单位】四川大学计算机学院,成都 610065【正文语种】中文MUC-6第一次提出命名实体识别[1],现在在自然语言处理中已经被广泛使用。
复杂场景下基于C-SHOT特征的3D物体识别与位姿估计
复杂场景下基于C-SHOT特征的3D物体识别与位姿估计张凯霖;张良【期刊名称】《计算机辅助设计与图形学学报》【年(卷),期】2017(029)005【摘要】为了准确地同时识别复杂点云中的多个目标,提出一种基于法矢改进点云特征C-SHOT的3D物体识别方法.首先,在估计RGB-D数据的点云法矢时将邻域点距离信息考虑在内,计算带距离权重的协方差矩阵得到更精确的点云法矢;其次根据特征点处法矢与邻域法矢的夹角余弦构造点云形状直方图,同时统计点云纹理直方图并与形状直方图融合成C-SHOT描述符;最后对场景与模板分别提取C-SHOT 特征,利用Kd树快速求得对应对,引入3D霍夫投票机制,并结合点云局部坐标系克服噪声遮挡问题完成多目标初识别.基于LM-ICP实现精确定位及位姿估计,画出目标包围盒,采用基准数据库CVLab以及采集实验室真实数据进行实验,结果验证了该方法的有效性与精确性.%A 3D object detection and recognition method is proposed in this paper. The method achieves pose estimations of multiple object instances in 3D scenes with some occlusions and clutter. First, the normal vector of point is estimated by computing the distance between the neighboring points and the feature one within the local spherical support domain. The longer the distance is, the smaller the weight is. Next, we encode the 3D descriptor called color signatures of histogram of orientations (C-SHOT) based on improved normal vector. Then we match 3D feature correspondences between scenes and models to prove the existence of the objects being sought on 3D hough voting space. Finally,we reject wrong feature correspondences and get rough trans-formation using random sample consensus (RANSAC). Once reliable feature correspondences have been se-lected, a final transformation matrix based on levenberg marquardt iterative closest point (LM-ICP), can be performed to further refine pose estimations. A thorough experimental evaluations is carried on CVLab 3D datasets and real lab 3D datasets for object recognition. Experimental results demonstrate the recognition ac-curacy and robust performance of the proposed method.【总页数】8页(P846-853)【作者】张凯霖;张良【作者单位】中国民航大学智能信号与图像处理天津市重点实验室天津 300300;中国民航大学智能信号与图像处理天津市重点实验室天津 300300【正文语种】中文【中图分类】TP391.41【相关文献】1.复杂场景下基于自适应多特征融合的跟踪算法 [J], 王恒军;赵书斌2.一种基于2D 和3D SIFT 特征级融合的一般物体识别算法 [J], 李新德;刘苗苗;徐叶帆;雒超民3.复杂场景下基于多特征融合的视频跟踪 [J], 丁建伟;唐云祁;田华伟;张小博4.基于ORB特征的复杂场景下的增强现实 [J], 王爱丽;胡长雨;韩闯5.复杂场景下基于特征融合的车辆跟踪 [J], 赵春晖;任杰;宿南因版权原因,仅展示原文概要,查看原文内容请购买。
编辑反馈的内容

编辑反馈的内容编辑反馈的内容Anatomical entity recognition with a hierarchical framework augmented by external resources PLOS ONEThank you for submitting your manuscript to PLOS ONE. After careful consideration, we feel that it has merit, but is not suitable for publication as it currently stands. Therefore, my decision is "Major Revision."We invite you to submit a revised version of the manuscript that addresses all of the concerns raised by the two reviewers. It is critical that you specifically address the following issues: 1) Provide more details on your methodology and data sources (possibly with examples), so that the reviewers can better evaluate the summary results provided in the tables; 2) Describe precisely what will be publicly available; 3) Thoroughly edit your revised manuscript before submission. Please note that PLoS ONE does not provide copy editing.We encourage you to submit your revision within forty-five days of the date of this decision.When your files are ready, please submit your revision by logging on to and following the Submissions Needing Revision link. Do not submit a revised manuscript as a new submission. Before uploading, you should proofread your manuscript very closely for mistakes and grammatical errors. Should your manuscript be accepted for publication, you may not have another chance to make corrections as we do not offer pre-publication proofs.If you would like to make changes to your financial disclosure, please include your updated statement in your cover letter.In addition, when submitting your revision please include the following items:A rebuttal letter that responds to each point brought up by the academic editor and reviewer(s). This letter should be uploaded as a 'Response to Reviewers' file.∙ A clean revised manuscript as your 'Manuscript' file.∙ A marked-up copy of the changes made from the previous article fileas a 'Revised Manuscript with Track Changes' file. This can be done using 'track changes' in programs such as MS Word and/orhighlighting any changes in the new document. ∙For more information on how to upload your revised submission, see our video:/everyone/2021/05/10/how-to-submit-your-revised-manuscript/If you choose not to submit a revision, please notify us.Yours sincerely,Ramin Homayouni, Ph.D.Academic EditorPLOS ONEJournal requirements:When submitting your revision, we need you to address these additional requirements:1. We note that you have stated that you will provide repository information for your data at acceptance. Should your manuscript be accepted for publication, we will hold your manuscript until you get in touch with us with the accession numbers or DOIs necessary to access your data. If you wish to make changes to your data availability statement, please describe these changes in your cover letter and we will make them on your behalf.Reviewers' comments:Reviewer's Responses to QuestionsComments to the Author1. Is the manuscript technically sound, and do the data support the conclusions?The manuscript must describe a technically sound piece of scientific research with data that supports the conclusions. Experiments must have beenconducted rigorously, with appropriate controls, replication, and sample sizes. The conclusions must be drawn appropriately based on the data presented.Reviewer #1: PartlyReviewer #2: Yes2. Has the statistical analysis been performed appropriately and rigorously?Reviewer #1: NoReviewer #2: Yes3. Does the manuscript adhere to the PLOS Data Policy?Authors must follow the , which requires authors to make all dataunderlying the findings described in their manuscript fully available without restriction. Please refer to the author’s Data Availability Statement in the manuscript. All data and related metadata must be deposited in an appropriate public repository, unless already provided as part of the submitted article or supporting information. If there are restrictions on the ability of authors to publicly share data —e.g. privacy or use of data from a third party— these reasons must be specified.Reviewer #1: YesReviewer #2: No4. Is the manuscript presented in an intelligible fashion and written in standard English?PLOS ONE does not copyedit accepted manuscripts, so the language in submitted articles must be clear, correct, and unambiguous. Any typographicalor grammatical errors should be corrected at revision, so please note any specific errors here.Reviewer #1: NoReviewer #2: Yes5. Review Comments to the AuthorPlease use the space provided to explain your answers to the questions above. You may also include additional comments for the author, includingconcerns about dual publication, research ethics, or publication ethics. (Please upload your review as an attachment if it exceeds 20,000 characters)Reviewer #1: This paper presents an interesting hierarchical framework to recognize anatomical entities, which is important in healthcare domain. Authors also bring the importance and the challenges of this task. To the best of my knowledge, I summarize my comments and suggestions as follows:1) Features for the sequence labeling problems under CRF are comprehensive and acceptable. Authors include baseline natural language features, semantic features from external knowledge about Wikipedia and WordNet, co-reference, and dictionary matching.2) Authors conducted relatively comprehensive experiments to show the contribution of each individual features and combination of features to the overall precision and recall.3) Problem introduction and annotation are good too.However, some major points need to be fixed:1) The writing of this paper is really poor. All table references are not correct, grammar errors can be seen almost every paragraph. It is very very difficult to read. It took me hundreds of hours to understand what authors try to deliver. Let me just show examples based on the abstract: a) The first sentence is not a complete sentence. "To develop....in medical records."b) "They infer relevant anatomical...in the record but also by other diverse..." ==> "They infer relevant anatomical entities based on bothexplicit anatomical expressions in the record and other diverse... "c) "The hierarchical framework was demonstrated..." ==> "The hierarchical framework was demonstrated...in F1 comparing to ???"many others in the paper!!!!!2) For the annotation, authors used A3 to check (A1, A2), then obtain the coefficient. Why not A3->(A1, A2), A1->(A2, A3), and A2->(A1, A3), then obtain the average coefficient? What if there is a annotation conflict, meaning that all 3 annotators do not agree? In addition, authors claim that their golden standard is not perfect, then why you still use them to do evaluations?3) From the experimental results, CF seems to be the smallest contribution to the precision in table 5 and table 8, then why adding CF gets a lotincrease in table 6 and 9? I don't believe this result. Can you give some explanations.In addition, some suggestions,It would be great if the paper gives some formal definition of eachconcept and shows some real or toy examples in figure. They can help readersto catch the point.Reviewer #2: The manuscript by Yan Xu et al. describes the construction of an anatomical entity recognition framework based on a machine learning algorithm. This framework can recognize not only explicit expressions of anatomical entities, but also implicit expressions such as diseases, clinical treatments, and clinical tests. The authors insisted that the recognition ofthe implicit expressions was important because the implicit expressions are abundant in clinical records and it is from these implicit expressions that medical experts can infer the anatomical entities described in the documents.The framework consists of three layers of entity recognizers, all of which are based on conditional random field (CRF) models. The first layer is themulti-class CRF recognizer developed for the 2021 and 2021 I2B2 challenge;this layer recognizes entities of three semantic classes: diseases, clinical treatments, and clinical tests. The other two recognizer layers are developedin this study. One (the second layer) is for explicit anatomical expressionand the other (the third layer) is for implicit expression.For use in the training and testing of the CRF models, the authorscarefully made an annotated corpus of 300 clinical records (i.e., thedischarge summaries in this study). The resulting annotations include 16690 explicit anatomical entity tokens and 5564 implicit anatomical entity tokens.The authors used the following features for the construction of the CRF models and considered the relative impact on the recognition performance using precision, recall, and F-score: baseline features (a standard set of useful features for general named entity recognition tasks), ontological features DF1 and DF2 (based on some of the representative anatomical ontologies: UMLS, MeSH, RadLex, and BodyParts3D), coreference features, and world knowledge features WF1, WF2, WF3, and HF, which is based on the dictionary constructed from the terms in Wikipedia and WordNet,whose definition sentences contain explicit anatomical entities, for the purpose of extracting implicit anatomical entities; HF is referred to as a hierarchical feature.This study is original and addresses an important task in processing medical documents in general. Their analytical approach seems to be sound in the sense of ordinal research on natural language processing. Therefore, this manuscript seems to warrant publication in PLOS ONE.The main criticism I have is the lack of consideration of concrete instances of anatomical dictionaries, clinical record corpuses, annotations, and experiment results. The authors only provided several numerical tables of the precision, recall, and F-score. All the main conclusions were drawn from observation of these numerical tables. Although I know that this style is common in NLP research papers, I believe that without an investigation of concrete instances, readers cannot evaluate the relative impact of the many factors that will affect the final performance.With only a little thought, one can list up many factors that affect the final results: data sources selection for the construction of the anatomical dictionaries, relative contribution of the (four) data sources on the performance, whether there exists some particular anatomical term in the four dictionaries that has a significant effect on the performance, the total size of anatomical dictionaries, semantic type of terms included in the anatomical dictionaries, type of clinical records, total number of clinical records and sentences which are annotated by the experts, target semantic types, the choices of machine learning algorithms, and the selection of the features for the CRF models, as well as many other factors. However, observation of the series of numerical tables yields only limited information about the impact of the factors and what entities can/cannot be recognized under the proposed framework.Therefore, at very least, the authors should provide a part of the list of 16690 ―explicit anatomical entity tokens‖ and 5564 ―implicit an atomical entity tokens‖ with their numbers of occurrences in the corpus, because these define the problem that this manuscript is addressing.In addition, the authors should discuss what terms in the anatomical dictionary match the annotated tokens and/or the results of theBegin/Inside/Outside (BIO) calling by the CRF model. Then some explanation ofthe relative impact of the framework components should be provided based onthe concrete instances of matching results.A second criticism concerns the reproducibility of this study. Althoughthe authors wrote at the end of the abstract section, ―The resources constructed for this research will be made publicly available.‖ since the resources needed for the reproduction of this study are not provided at this time, I could not evaluate whether the results can be reproduced using the resources that the authors say will be eventually provided. I know that the authors have made a great contribution to the NLP research field, not only by introducing novel concepts, but also by providing many useful resources, including software and annotated corpuses, and so I believe that the resources that will be available to the public will be quite useful for NLP researchers, but I believe that it is quite important to meet the reproducibility criteria stated in the publication criteria of PLOS ONE(―described in sufficient detail for another researcher to reproduce the experiments described‖), and in order to meet these criteria, I expect thatthe authors will need to write additional paragraphs describing in sufficient detail how to reproduce the result tables. I believe that the results havebeen largely affected by the content of the dictionaries and annotatedcorpuses constructed by the authors, and therefore, without these resources,it will be quite difficult for other researchers to reproduce exactly the results described in the tables.Minor pointsPage 8, lines 7–10I do not understand the meaning of the numbers described in Table 4.What is the denominator of ―Coverage of explicit named entity‖? Total number of annotated tokens in the corpus? Or number of unique tokens annotated? In typical cases, rather simple anatomical terms such as ―brain‖, ―liver‖, and ―blood‖ frequently appear in the corpus, and of course these are matched readily to the anatomical dictionaries.Page 12, lines 7–13.The table numbering in the main text is not consistent with the actualtable numbers. (Table 4, ..., Table 9 in the main text should be Table 5, …, Table 10.)Page 14, lines 3–5Near the top of the DISCUSSION section, the author wrote: ―While the features based on the dictionary of anatomical entity expressions greatly improved the performance on explicit anatomical entities, they do not enhance th e performance on explicit anatomical entities.‖ But the second occurrence of the word ―explicit‖ should be ―implicit‖.6. If you would like your identity to be revealed to the authors, please include your name here (optional).Your name and review will not be published with the manuscript.Reviewer #1: (No Response)Reviewer #2: (No Response)[NOTE: If reviewer comments were submitted as an attachment file, theywill be attached to this email and accessible via the submission site. Please log into your account, locate the manuscript record, and check for the action link "View Attachments". If this link does not appear, there are no attachment files to be viewed.]。
电子信息工程专业英语词汇
n.晶体管n.二极管n 半导体resistor n 电阻器capacitor n 电容器alter nati ng adj 交互的amplifier n 扩音器,放大器in tegrated circuit 集成电路lin ear time inv aria nt systems 线性时不变系统voltage n 电压,伏特数tolera nee n 公差;宽容;容忍conden ser n 电容器;冷凝器dielectric n 绝缘体;电解质electromag netic adj 电磁的deflection n偏斜;偏转;偏差lin ear device 线性器件in tegrated circuits 集成电路an alog n 模拟digital adj 数字的,数位的horiz on tal adj, 水平的,地平线的vertical adj 垂直的,顶点的amplitude n 振幅,广阔,丰富atte nu ati on 衰减;变薄;稀薄化multimeter 万用表freque ney 频率,周率the cathode-ray tube dual-trace oscilloscope 阴极射线管双踪示波器sig nal gen erati ng device 信号发生器peak-to-peak output voltage 输岀电压峰峰值sine wave 正弦波trian gle wave 三角波square wave 方波amplifier 放大器,扩音器oscillator 振荡器feedback 反馈,回应phase 相,阶段,状态filter 滤波器,过滤器rectifier 整流器;纠正者1ban d-stop filter 带阻滤波器ban d-pass filter 带通滤波器decimal adj 十进制的,小数的hexadecimal adj/n 十六进制的bin ary adj 二进制的;二元的1 octal adj 八进制的domai n n 域;领域code n代码,密码,编码v编码the Fourier tra nsform 傅里叶变换Fast Fourier Transform快速傅里叶变换microc on troller n 微处理器;微控制器beam n (光线的)束,柱,梁polarize v (使)偏振,(使)极化fuzzy adj模糊的|Artificial In tellige nee Shell 人工智能外壳程序Expert Systems 专家系统Artificial In tellige nee 人工智能Perceptive Systems 感知系统neural network 神经网络fuzzy logic 模糊逻辑in tellige nt age nt 智能代理electromag netic adj 电磁的coaxial adj同轴的,共轴的microwave n 微波charge v充电,使充电two-dime nsio nal 二维的;缺乏深度的three-dime nsio nal 三维的;立体的;真实的object-orie nted programm ing 面向对象的程序设计spectral adj 光谱的attenuation n衰减;变薄;稀释distortion n失真,扭曲,变形wavelength n 波长refractive adj 折射的ATM 异步传输模式Asynchronous Transfer ModeADSL 非对称用户数字线Asymmetric digital subscriberlineVDSL 甚高速数字用户线very high data rate digitalsubscriber lineHDSL 高速数据用户线high rate digital subscriber lineFDMA 频分多址(Frequency Division Multiple Access)TDMA 时分多址(Time Division Multiple Access) CDMA 同步码分多址方式(Code Division Multiple Access)WCDMA宽带码分多址移动通信系统(WidebandCodeDivisio n Multiple Access)TD-SCDMA(Time Divisio n Sy nchro nous Code Divisio nMultiple Access)时分同步码分多址SDLC(sy nchro nous data link con trol) 同步数据链路控制HDLC(high-level data link con trol) 高级数据链路控制IP/TCP(i nter net protocol /tra nsfer Co ntrol Protocol)网络传输控制协议ITU (I nternatio nal Telecomm un icati on Union) 国际电彳言联盟ISO 国际标准化组织(In ter natio nal Sta ndardizatio nOrganization );OSI开放式系统互联参考模型(Open SystemIn terc onn ect )GSM 全球移动通信系统( Global System for Mobile Communi cati ons )GPRS 通用分组无线业务(Gen eral Packet Radio Service)FDD(freque ncy divisi on duplex) 频分双工TDD(time divisi on duplex) 时分双工VPI 虚路径标识符(Virtual Path Identifier );ISDN ( Integrated Services Digital Network )综合业务数字网IDN 综合数字网(integrated digital network )HDTV (high defi ni tion televisi on) 高清晰度电视DCT(Discrete Cos ine Tra nsform) 离散余弦变换VCI(virtual circuit address) 虚通路标识MAN 城域网Metropolitan area networks LAN 局域网localarea network WAN 广域网wide area network 同步时分复统计时分复用STDM Statistical Time Divisio nMultiplexi ng 单工传输simplex transmission 半双工传输half-duplex tran smissi on 全双工传输full-duplex tra nsmissi on 交换矩阵Switching Matrix 电路交换circuit switchi ng 分组交换packet switching扌报文交换message switching 奇偶校验paritychecking 循环冗余校验CRC Cyclic Redu nda ncyCheck 虚过滤Virtual filter 数字滤波digital filtering伪随机比特Quasi Ra ndom Bit 带宽分配Bandwidth allocatio n信源information source 信宿destination 数字化digitalize 数字传输技术Digital tra nsmissio n techno logy 灰度图像Grey scale images 灰度级Greyscale level 幅度谱Magnitude spectrum 相位谱Phase spectrum 频谱frequency spectrum 智能设备Smart Device 软切换Soft handover 硬切换HardHa ndover 相干检测Cohere nt detecti on 边缘检测Edge detection 冲突检测collision detection 业务集合service integration 业务分离/综合serviceseparation/ integration 网络集合networkintegration 环形网Ring networks 令牌环网TokenRing network 网络终端Network Terminal 用户终端user terminal 用户电路line circuit 电路利用率channel utilization (通道利用率)相关性cohere nee 相干解调cohere nt demodulation 数字图像压缩digital image compressi on 图像编码image encoding 有损/无损压缩lossy/losslesscompression 解压decompression 呼叫控制CallControl 误差控制error eontrol 存储程序控制storedprogram eon trol 存储转发方式store-a nd-forwardmanner 语音视频传输voice\video transmission 视频点播video-on-demand(VOD) 会议电视VideoCon fere nee 有线电视cable television 量化quantization 吞吐量throughput 话务量traffic 多径分集Multipath diversity 多媒体通信MDM MultimediaCommu nicatio n 多址干扰Multiple AccessInterferenee 人机交互man machi ne in terface 交互式会话Conv ersati onal in teracti on 路由算法Routing Algorithm 目标识另U Object recognition 话音变换Voice transform 中继线trunkline 传输时延transmission delay 远程监控remote monitoring 光链路optical link 拓扑结构Topology 均方根rootmean square whatsoever=whatever 0switchboard (电话)交换台bipolar (电子)双极的tran sistor diode semic on ductoranode n 阳极,正极cathoden 阴极|breakdow n n 故障;崩溃terminal n 终点站;终端,接线端emitter n 发射器collect v 收集,集聚,集中oscilloscope 示波镜;示波器gain 增益,放大倍数forward biased 正向偏置reverse biased 反向偏置P-N junction PN 结MOS( metal-oxide semiconductor ) 金属氧化物半导体enhan ceme nt and exhausted 增强型和耗尽型chip n 芯片,碎片modular adj 模块化的;模数的sensor n 传感器plug vt 堵,塞,插上n塞子,插头,插销coaxial adj 同轴的,共轴的fiber n 光纤relay eon tact 继电接触器sin gle in structi on programmer 单指令编程器dedicated manu factures programm ing unit 专供制造厂用的编程单元in sulator n绝缘体,绝缘物noneon ductive adj非导体的,绝缘的antenna n天线;触角modeli ng n 建模,造型simulati on n仿真;模拟prototype n 原型array n排队,编队vector n 向量,矢量wavelet n微波,小浪sine 正弦cosine 余弦inv erse adj 倒转的,反转的n反面;相反v倒转high-performa nee 高精确性,高性能the in sulati on resista nee 绝缘电阻assembly lan guage in structi ons n 汇编语言指令premise (复)房屋,前提cursor (计算机尺的)游标,指导的elapse (时间)经过,消失vaporize (使)蒸发subsystem (系统的)分部,子系统,辅助系统metallic (像)金属的,含金属的,(声音)刺耳的dispatch (迅速)派遣,急件consen sus (意见)一致,同意deadli ne (最后)期限,截止时间tomographic X线体层摄像的alas 唉,哎呀cluster把…集成一束,一组,一簇,一串,一群en cyclopedia 百科全书millio nfold 百万倍的semic on ductor 半导体radius半径范围,半径,径向射线half-duplex tra nsmissi on 半双工传输accompa nime nt 伴随物,附属物reservati on 保留,预定quotatio n 报价单,行情报告,引语memora ndum 备忘录red undancy 备用be viewed as 被看作…be regards as 被认为是as such 本身;照此;以这种资格textual本文的,正文的verge 边界variati on 变化,变量conv ersi on 变化,转化ide ntity 标识;标志criterio n 标准,准则in parallel o n 并联到,合并到juxtapose 并置,并歹卩dial ing pulse 拨号脉冲wave-guide 波导wavele ngth divisi on multiplexed 波分复用baud rate 波特率playback 播放(录音带,唱片)no greater tha n 不大于update不断改进,使…适合新的要求,更新asymmetric 不对称的irrespective 不考虑的,不顾的in evitably 不可避免的in evitable 不可避免的,不可逃避的,必定的segme nt 部分abrasion 擦伤,磨损deploy采用,利用,推广应用take the form of 采用…的形式parameter 参数,参量layer 层dope 掺杂FET(field effect tra nsistors)场效应管audio recordi ng 卩昌片ultra-high-freque ncy(UHF)超高频in excess of 超过in excess of 超过hypertext 超文本in gredie nt 成分,因素in gredie nt 成分,组成部分,要素metropolita n-area n etwork(WAN)城域网metropolitan area network(WAN)城域网,城市网络con gestio n 充满,拥挤,阻塞collisio n 冲突extractive 抽岀;释放岀extract抽取,取岀,分离lease 出租,租约,租界期限,租界物pass on 传递,切换tran smissi on 传输facsimile 传真inno vative二inno vatory 仓新的,富有革新精神的track 磁道impetus 促进,激励cluster 簇stored-program con trol(SPC) 存储程序控制a large nu mber of 大量的peal 大声响,发岀supersede 代替suppla nt 代替,取代out-of-ba nd sig nali ng 带外信号simplex tran smissi on 单工传输con ductor 导体等级制度,层次底层结构,基础结构地理的,地区的地理上GIS(grou nd in strume ntation system) 地面测量系统gro und stati on 地面站earth orbit 地球轨道Lan d-sat 地球资源卫星rug 地毯,毯子ignite 点火,点燃,使兴奋electromag netic 电磁的in ductive 电感arc 电弧teleph ony 电话(学),通话dielectric 电介质,绝缘材料;电解质的,绝缘的capacitor 电容telecomm uni catio n 电信,无线电通讯sce nario 电影剧本,方案modem pool 调制解调器(存储)池superimpos ing 叠加,重叠pin 钉住,扣住,抓住customize 定做,定制mono lithic 独立的,完全统一的alumi nize 镀铝strategic 对全局有重要意义的,战略的substa ntial 多的,大的,实际上的multi-path fadi ng 多径衰落multi-path 多路,多途径;多路的,多途径的multi-access 多路存取,多路进入multiplex 多路复用multiplex 多路复用的degradation 恶化,降级dioxide 二氧化碳LED(light-emitti ng-diode)发光二极管evolution 发展,展开,渐进feedback 反馈,回授dime nsion 范围,方向,维,元sce nario 方案sce nario 方案,电影剧本amplifer 放大器nonin vasive 非侵略的,非侵害的tariff 费率,关税率;对…征税distributed fun ctio nal pla ne(DFP)分布功能平面DQDB(distributed queue dual bus)分布式队列双总线hierarchy 分层,层次partiti on 分成segme ntati on 分割in terface 分界面,接口asu nder 分开地,分离地detached 分离的,分开的,孤立的dispe nse 分配allocate 分配,配给;配给物cen tigrade 分为百度的,百分度的,摄氏温度的fractal 分形molecule 分子,微小,些微cellular蜂窝状的cellular蜂窝状的,格形的,多孔的auxiliary storage(also called sec on dary storage) 辅助存储器decay 腐烂,衰减,衰退n egative 负电vicinity附近,邻近vicinity附近地区,近处sophisticated 复杂的,高级的,现代化的high-freque ncy(HF) 高频high defi ni tion televisi on 高清晰度电视铬给…作注解根据,按照公布,企业决算公开公用网功能,功能度汞共鸣器共振古怪的,反复无常的管理,经营cursor光标(显示器),游标,指针opticalcomputer 光计算机photoco nductor 光敏电阻optical disks 光盘optically光学地,光地wide-area n etworks 广域网specification规范,说明书silicon 硅the in ter nati onal telecomm un icatio n union(ITU)际电信联盟excess过剩obsolete 过时的,废弃的maritime 海事的syn thetic 合成的,人造的,综合的syn thetic 合成的,综合性的rati onal 合乎理性的rati on alizati on 合理化streamli ne 合理化,理顺in frared 红夕卜线的,红外线skepticism 怀疑论ring n etwork 环形网hybrid混合物coun terpart 伙伴,副本,对应物electromecha nical 机电的,电动机械的Robot机器人Robotics 机器人技术,机器人学accumulati on 积累in frastructure 基础,基础结构substrate 基质,底质upheaval 激变,剧变compact disc 激光磁盘(CD)concen trator 集中器,集线器cen trex system 集中式用户交换功能系统conv erge on 集中于,聚集在…上lumped eleme nt 集总元件CAI(computer-aided in structio n) 计算机辅助教学computer-i ntegrated manu facturi ng(CIM) 计算机集成制造computer mediated comm un icatio n( CMC) 介通信record 记录register expedite weight 力口权acceleratecategorize in additi on hypothetical rigidly兼容性,相容性监视监视mono chromatic 单色的,单色光的,黑白的ballistic 弹道的,射击的,冲击的hierarchy infrastructuregeographicgeographicallyextraterrestrial 地球外的,地球大气圈外的chromiumanno tate interms ofdisclosurepublic n etworkfun cti on alitymercury res onator resonancewhimsicaladmi nistration计算机中记录器,寄存器加快,促进加速,加快,促进加以类别,分类加之,又,另外假设的坚硬的,僵硬的compatibilitysurveilla neesurveilla neeretrieval 检索,(可)补救 verificati on 检验 simplicity 简单,简明film胶片,薄膜 take over 接管,接任 rugged ness 结实threshold 界限,临界值 with the aid of 借助于,用,通过 wire line 金属线路,有线线路 cohere nt 紧凑的,表达清楚的,粘附的,相干的 compact 紧密的 approximati on 近似 un dertake 进行,从事 tran sistor 晶体管 elaborate 精心制作的,细心完成的,周密安排的 vigilant 警戒的,警惕的 alcohol 酒精,酒 local area n etworks(LANs) 局域网 local-area n etworks(LANs) 局域网 drama 剧本,戏剧,戏剧的演岀 focus on聚集在,集中于,注视in sulator 绝缘 root mean square 均方根 un iform 均匀的 ope n-system-i nterc onn ectio n(OSI) 开放系统互连 expire 开始无效,满期,终止 immu nity 抗扰,免除,免疫性 take …into account 考虑,重视… programmable in dustrial automati on 可编程工业自动化demo un table tun ablereliable 可靠 be likely tovideotex video n egligible可拆卸的可调的 可能,大约,像要 可视图文电视 可以忽略的deviate 偏离,与…不同 spectrum 频谱 come into play 其作用 en trepre neurial 企业的 heuristic methods启发式方法 play a •••role(part) 起…作用stem from 起源于;由…发生organic 器官的,有机的,组织的 hypothesis前提 fron t-e nd 前置,前级 pote ntial 潜势的,潜力的 inten sity 强度coin cide nee 巧合,吻合,一致scalpel 轻便小刀,解剖刀 inven tory 清单,报表spherical 球的,球形的 disti nguish 区别,辨别 succumb屈服,屈从,死global fun ctio nal pla ne(GFP) 全局功能平面 full-duplex tra nsmissi on 全双工传输hologram 全息照相,全息图 deficie ncy缺乏therm onu clear 热 核的 artifact 人工制品 AI(artificial in tellige nee)人工智能fusion 熔解,熔化 diskettes(also called floppy disk)软盘sector 扇区 en tropy 熵upli nk 上行链路 arsenic 砷simulta neous 同时发生的,同时做的 simulta neous 同时发生的,一齐的 coaxial 同轴的 copper 铜 statistical 统计的,统计学的 domin ate 统治,支配 in vest in 投资perspective 透视,角度,远景 graphics 图示,图解 pictorial图像的coat ing 涂层,层 deduce 推理reas oning strategies 推理策略 inference engine 推理机topology 拓扑结构 heterod yne 夕卜差法的peripheral 夕卜界的,外部的,周围的 gateway 网关 hazardous 危险的 microwave 微波(的)microprocessor 微处理机,微处理器 microelectro nic微电子nua nee 微小的差别(色彩等) en compass围绕,包围,造成,设法做到mai nte nance 维护;保持;维修satellite comm uni cati on 卫星通彳言 satellite network 卫星网络 tran sceiver无线电收发信机radio-relay tra nsmissi on 无线电中继传输without any doubt 无疑passive satellite无源卫星n eural n etwork神经网络very-high-freque ncy(VHF) 甚高频 sparse 稀少的, dow nli nk aerial 空气的,空中的,无形的,虚幻的;天线broadba nd 宽(频)带pervasive扩大的,渗透的 tensile 拉力的,张力的roma nticism 浪漫精神,浪漫主义discrete 离散,不连续 ion 离子 force 力量;力 stereoph onic 立体声的 contin uum 连续统一体,连续统,闭联集 smart 灵巧的;精明的;洒脱的 toke n 令牌on the other hand另一方面 hexago nal 六边形的,六角形的 hexag on 六角形,六边形 mon opoly 垄断,专禾U video-clip 录像剪辑 alumi num 铝pebble 卵石,水晶透镜 forum 论坛,讨论会logical relati on ships 逻辑关系 code book 码本pulse code modulatio n(PCM) 脉冲编码调制 roam 漫步,漫游bps(bits per sec on d) 每秒钟传输的比特 ZIP codes美国邮区划分的五位编码susceptible(to) 敏感的,易受…的 analog 模拟,模拟量patter n recog niti on 模式识另 U bibliographic 目录的,文献的 n eodymium 钕the europea n telecomm uni cati on sta ndardizati on in stitute(ETSI) 欧洲电信标准局coordi nate配合的,协调的;使配合,调整ratify 批准,认可 bias 偏差;偏置 upgrade distortio n iden tification 升级失真,畸变 识别,鉴定,验明precursor visualizati on pragmatic 实际的 impleme ntation 实施,实现,执行,敷设en tity 实体,存在 vector qua ntificati on 矢量量化mislead 使…误解,给…错误印象,引错vex使烦恼,使恼火defy 使落空 facilitate 使容易,促进 reti na 视网膜 compatible 适合的,兼容的tra nsceiver 收发两用机 authorize 授权,委托,允许 data security数据安全性data in depe ndence 数据独立 data man ageme nt 数据管理 database数据库database man ageme nt system(DBMS) 理信息系统database tran sacti on 数据库事务 data in tegrity 数据完整性,数据一致性 atte nu ati on衰减fadi ng 衰落,衰减,消失 dual 双的,二重的 tra nsie nt瞬时的determi ni stic 宿命的,确定的 algorithm 算法 dissipatio n 损耗carbon 碳 diabetes 糖尿病cumbersome 讨厌的,麻烦的,笨重的 razor 剃刀,剃 go by the name of通称,普通叫做commucati on sessi on 通信会话 traffic 通信业务(量) syn chr onous tra nsmissi on 同步传输con curre nt同时发生的,共存的数据库管feasibility lin earity con strain considerablegeo-stati onaryby con trast coorelati on mutual 相互的 稀疏的 下行链路 先驱,前任 显像现实性,可行性 线性度限制,约束,制约 相当的,重要的 相对地面静止 相反,而,对比起来 相关性相互的,共同的 相互连接,互连one after the other 相继,依次小型计算机 协议,草案 协议,规约,规程心理(精神)听觉的;传音的 通信信道选择行程编码mutually in terc onn ectmini computer protocolprotocol psycho-acoustic cha nn elizati on 信道化, run len gth en coding groom 修饰,准备虚拟许多, virtual ISDN multitude ISDN大批,大量whirl 旋转 prefere nee avalanche pursue 寻求, interrogation dumb 哑的, subcategory喜欢 选择, 雪崩从事 询问不说话的,无声的亚类,子种类,子范畴orbital 眼眶;轨道oxygen 氧气,氧元素service switchi ng and con trol poin ts(SSCPs) 控制点service con trol poi nts(SCPs) 业务控制点service con trol fun ctio n(SCF) 业务控制功能in con cert 一致,一齐 han dover移交,越区切换 at a rate of以 .... 的速率in the form of 以…的形式业务交换base on…以…为基础yttrium钇(稀有金属,符号Y)asyn chr onous tra nsmissi on 异步传输asyn chr onous 异步的exceptio nal 异常的,特殊的voice-grade 音频级indium 铟give rise to 引起,使产生cryptic隐义的,秘密的hard disk 硬盘hard automati on 硬自动化by means of 用,依靠equip with 用…装备subscriber 用户telex 用户电报PBX(private branch excha nge)用户小交换机或专用交换机be called upon to 用来…,(被)要求…superiority 优势predom inance 优势,显著active satellite 有源卫星in comparis on with 与…比较comparable to 与…可比prelim in ary 预备的,初步的prem on iti on 预感,预兆nu cleus 原子核vale nee 原子价circumfere nee 圆周,周围teleprocessi ng 远程信息处理,遥控处理perspective 远景,前途con strain 约束,强迫mobile运动的,流动的,机动的,装在车上的convey运输,传递,转换impurity 杂质impurity 杂质,混杂物,不洁,不纯rege nerative 再生的improve over 在 ....... 基础上改善play importa nt role in 在…中起重要作用in close proximity 在附近,在很近un derly ing 在下的,基础的in this respect 在这方面en tail遭遇,导致prese ntation 赠与,图像,呈现,演示n arrowba nd 窄(频)带deploy展开,使用,推广应用megabit 兆比特germa nium 锗positive 正电quadrature 正交orthog onal 正交的quadrature amplitude modulatio n(QAM)正交幅度调制on the right track 正在轨道上sustain支撑,撑住,维持,持续outgrowh 支派;长岀;副产品domin ate 支配,统治kno wledge represe ntati on 矢口识表示kno wledge engin eeri ng 矢口识工程kno wledge base 矢口识库in diameter 直径helicopter 直升飞机acro nym 只取首字母的缩写词as long as 只要,如果tutorial指导教师的,指导的coin 制造(新字符),杜撰fabricatio n 制造,装配;捏造事实proton 质子in tellige nce 智能,智力,信息in tellige nt n etwork 智能网in termediate 中间的nu cleus(pl. nu clei) 中心,核心n eutr ons 中子termi nal 终端,终端设备overlay重叠,覆盖,涂覆highlight 重要的部分,焦点charge主管,看管;承载domi nant 主要的,控制的,最有力的cyli nder 柱面expert system 专家系统private network 专用网络tra nsiti on 转变,转换,跃迁relay 转播relay 转播,中继repeater 转发器,中继器pursue追赶,追踪,追求,继续desktop publish 桌面岀版ultraviolet 紫外线的,紫外的;紫外线辐射field 字段vendor自动售货机,厂商n aturally 自然的;天生具备的syn thesize 综合,合成in tegrate 综合,使完全ISDN(i ntergrated services digital n etwork)综合业务数字网as a whole 总体上bus network 总线形网crossbar 纵横,交叉impeda nce 阻抗ini tial 最初的,开始的optimum 最佳条件appear as 作为…岀现A An alog 模拟A/D An alog to Digital 模-数转换AAC Adva need Audio Codi ng 高级音频编码ABB Automatic Black Bala nce 自动黑平衡ABC American Broadcast ing Compa ny 美国广播公司Automatic Bass Compe nsati on 自动低音补偿Automatic Bright ness Con trol 自动亮度控制ABL Automatic Black Level 自动黑电平ABLC Automatic Bright ness Limiter Circuit 自动亮度限制电路ABU Asia n Broadcast ing Un io n 亚洲广播联盟(亚广联ABS American Bureau of Sta ndard 美国标准局AC Access Con ditio ns 接入条件Audio Cen ter 音频中心ACA Adjace nt Cha nnel Atte nuati on 邻频道衰减ACC Automatic Ce nteri ng Co ntrol 自动中心控制Automatic Chroma Control 自动色度(增益ACK Automatic Chroma Killer 自动消色器ACP Additive Colour Process 加色法ACS Access Co ntrol SystemAdva need Comm uni cati on Service 高级通信业务Area Comm uni cati on System区域通信系统ADC An alog to Digital Con verter 模-数转换器Automatic Degaussirng Circuit 自动消磁电路ADL Acoustic Delay Li ne 声延迟线ADS Audio Distribution System 音频分配系统AE Audio Erasi ng 音频(声音AEF Automatic Editi ng Fun ction 自动编辑功能AES Audio Engin eeri ng Society 音频工程协会AF AudioFreque ncy 音频AFA Audio Freque ncy Amplifier 音频放大器AFC Automatic Freque ncy Coder 音频编码器Automatic Freque ncy Co ntrol 自动频率控制AFT Automatic Fi ne Tuning 自动微调Automatic Freque ncy Track 自动频率跟踪Automatic Freque ncy Trim 自动额率微调AGC Automatic Ga in Con trol 自动增益控制AI ArtificialIn tellige nce 人工智能ALM Audio-Level Meter 音频电平表AM Amplitude Modulation 调幅AMS Automatic Music Se nsor置ANC Automatic Noise Ca nceller 自动噪声消除器ANT ANTe nna 天线AO An alog Output 模拟输岀APS Automatic Program Search 自动节目搜索APPS Automatic Program Pause System 自动节目暂停系统APSS Automatic Program Search System 自动节目搜索系统AR Audio Respo nse 音频响应ARC Automatic Remote Con trol 自动遥控ASCII American Standard Code for InformationIn tercha nge 美国信息交换标准AST Automatic Sca nning Tracki ng 自动扫描跟踪ATC Automatic Timi ng Co ntrol 自动定时控制Automatic Tone Correcti on 自动音频校正ATM Asy nchro nous Tra nsfer Mode 异步传输模式ATF Automatic Track Fi ndi ng 自动寻迹ATS Automatic Test System 自动测试系统ATSC Adva need Televisio n Systems Committee(美国高级电视制式委员会)***C Automatic Volume Con trol 自动音量控制***R Automatic Voltage Regulator 自动稳压器AWB Automatic White Bala nee 自动白平衡AZCAutomatic Zoomi ng Con trol 自动变焦控制AZSAutomatic Zero Setti ng 自动调零BA Bra nch Amplifier 分支放大器Buffer Amplifier 缓冲放大器BAC Bin ary-A nalog Co nversion 二进制模拟转换BB Black Burst 黑场信号BBC British Broadcast ing Corporation 英国广播公司BBI Beiji ng Broadcasti ng In stitute 北京广播学院BC Bin ary Code 二进制码Bala need Curre nt 平衡电流Broadcast Con trol 广播控制BCT Ban dwidth Compressi on Tech nique 带宽压缩技术BDB Bi-directio nal Data Bus 双向数据总线BER Basic En codi ng Rules 基本编码规则Bit Error Rate 比特误码率BF Burst Flag 色同步旗脉冲BFA Bare Fiber Adapter 裸光纤适配器Brilloui n Fiber Amplifier 布里渊光纤放大器BGM Backgrou nd Music 背景音乐BIOS Basic In put / Output System 基本输入输出系统B-ISDN Broadba nd-ISDN 宽带综合业务数据网BIU Basic In formation Un it 基本信息单元Bus In terface Unit 总线接口单元BM Bi-phase Modulation 双相调制BML Busi ness Man ageme nt Layer 商务管理层BN Backbo ne Network 主干网BNT Broadba nd Network Termi natio n 宽带网络终端设备BO Bus Out 总线输岀BPG Basic Pulse Gen erator 基准脉冲发生器BPS Ba nd Pitch Shift 分频段变调节器BSI British Sta ndard In stitute 英国标准学会BSS Broadcast Satellite Service 广播卫星业务BT Block Term in al 分线盒、分组终端British Telecom 英国电信BTA Broadba nd Termi nal Adapter 宽带终端适配器Broadcasti ng Tech no logy Associati on (日本BTL Bala need Tran sformer-Less 桥式推挽放大电路BTS Broadcast Tech nical Sta ndard 广播技术标接入控制系统自动音乐传感装BTU Basic Tra nsmission Un it 基本传输单元BVU Broadcasting Video Unit 广播视频型(一种3/4英寸带录像机记录格式BW Ban dWidth 带宽BWTV Black and White Televisio n 黑白电视CA Co nditio nal Access 条件接收CAC Con ditio nal Access Con trol 条件接收控制CAL Co nti nuity Accept Limit 连续性接受极限CAS Con ditio nal Access System 条件接收系统Co nditio nalAccess Sub-system 条件接收子系统CATV Cable Televisi on 有线电视,电缆电视Commu nity An te nna Televisio n 共用天线电视C*** Con sta nt An gular Velocity 恒角速度CBC Can adia n Broadcasti ng Corporati on 力口拿大广播公司CBS Columbia Broadcasti ng System (美国哥伦比亚广播公司CC Concen tric Cable 同轴电缆CCG Chi nese Character Gen erator 中文字幕发生器CCIR In ter nati onal Radio Con sultativeCommittee 国际无线电咨询委员会CCITT In ter nati onal Telegraph and Teleph oneCon sultativeCommittee 国际电话电报咨询委员会CCR Cen tral Co ntrol Room 中心控制室CCTV Chi na Ce ntral Televisio n 中国中央电视台Close-Circuit Televisio n 闭路电视CCS Cen ter Cen tral System 中心控制系统CCU Camera Con trol Un it 摄像机控制器CCW Cou nter Clock-Wise 反时针方向CD Compact Disc 激光唱片CDA Curre nt Dumpi ng Amplifier 电流放大器CD-E Compact Disc Erasable 可抹式激光唱片CDFM Compact Disc File Man ager 光盘文件管理(程序CDPG Compact-Disc Plus Graphic 带有静止图像的CD唱盘CD-ROM Compact Disc-Read Only Memory 只读式紧凑光盘CETV Chi na Educatio nal Televisio n 中国教育电视台CF Color Frami ng 彩色成帧CGA Color Graphics Adapter 彩色图形(显示卡CI Common In terface 通用接口CGA Color Graphics Adapter 彩色图形(显示卡CI Common In terface 通用接口CIE Chin ese In stitute of ElectronicsCII China Information Infrastructure础设施CIF Comm on In termediate FormatCIS Chin ese In dustrial Sta ndardCLV Con sta nt Lin ear Velocity 恒定线速度CM Colour Mon itor 彩色监视器CMTS Cable Modem Termi nation System 线缆调制解调器终端系统CNR Carrier-to-Noise Ratio 载噪比CON Co nsole 操纵台Con troller 控制器CPB Corporation of Public Broadcasti ng (美国公共广播公司CPU Central Processi ng Un it 中央处理单元CRC Cyclic Redu nda ncy Check 循环冗余校验CRCC CRI Cyclic Redu ndan cy Check Code 循环冗余校验码CROM Chi na Radio In ter natio nal 中国国际广播电台CRT Con trol Read Only Memory 控制只读存储器CS Cathode-Ray Tube 阴极射线管CSC Commu nication Satellite 通信卫星CSS Color Sub-carrier 彩色副载波Cen ter Storage Server 中央存储服务器Con te nt Scrambl ing System 内容加扰系统CSU Cha nnel Service Un it 信道业务单元CT Color Temperature 色温CTC Cassette Tape Co ntroller 盒式磁带控制器Cha nnel Traffic Con trol 通道通信量控制Cou nter Timer Circuit 计数器定时器电路Cou nter Timer Con trol 计数器定时器控制CTE Cable Term in ation Equipme nt 线缆终端设备Customer Term inal Equipme nt 用户终端设备CTV Color Televisi on 彩色电视CVD Chi na Video Disc 中国数字视盘CW Carrie Wave 载波DAB Digital Audio Broadcast ing 数字音频广播DASH Digital Audio Statio nary Head 数字音频静止磁头DAT Digital Audio Tape 数字音频磁带DBMS Data Base Man ageme nt System 数据库管理系统DBS Direct Broadcast Satellite 直播卫星DCC Digital Compact Cassette 数字小型盒带Dyn amic Co ntrast Co ntrol 动态对比度控制DCT Digital Compo nent Tech nology 数字分量技术Discrete Cosi ne Tra nsform 离散余弦变换DCTV Digital Color Televisio n 数字彩色电视DD DirectDrive 直接驱动DDC Direct Digital C on trol 直接数字控制DDE Dy namic Data Excha nge 动态数据交换DDM Data Display Mon itor 数据显示监视器DES Data Eleme ntary Stream 数据基本码流Data En cryption Sta ndard 美国数据加密标准DF Dispersio n Flatte ned 色散平坦光纤DG Differe ntial Gai n 微分增益DI Digital In terface 数字接口DITEC Digital Televisio n Camera 数字电视摄像机DL Delay Line 延时线DLD Dyn amic Lin ear Drive 动态线性驱动DM Delta Modulation 增量调制Digital Modulation 数字调制DMB Digital Multimedia Broadcasti ng 数字多媒体广播DMC Dyn amic Motio n Co ntrol 动态控制DME Digital Multiple Effect 数字多功能特技DMS Digital Masteri ng System 数字主系统DN Data Network 数据网络DNG Digital News Gatheri ng 数字新闻采集DNR Digital Noise Reducer 数字式降噪器DOB Data Output Bus 数据输岀总线DOCSIS Data Over Cable Service In terfaceSpecificatio ns 有线数据传输业务接口规范DOC Drop Out Compe nsati on 失落补偿DOS Disc Operat ing System 磁盘操作系统DP Differe ntial Phase 微分相位Data Pulse 数据脉冲DPCM Differe ntial Pulse Code Modulation 差值脉冲编码调制DPL Dolby Pro Logic 杜比定向逻辑DSB Digital Satellite Broadcasti ng 数字卫星广播DSC Digital Studio Con trol 数字演播室控制DSD Dolby Surrou nd Digital 杜比数字环绕声DSE Digital Special Effect 数字特技DSK Dow n-Stream Key 下游键DSP Digital Sig nal Process ing 数字信号处理Digital Sou nd Processor 数字声音处理器DSS Digital Satellite System 数字卫星系统DT Digital Tech ni que 数字技术Digital Televisio n 数字电视Data Term in al 数据终端Data Tran smissi on 数据传输DTB Digital Terrestrial Broadcast ing 数字地面广播DTBC Digital Time-Base Corrector 数字时基校正器DTC Digital Televisio n Camera 数字电视摄像机DTS Digital Theater System 数字影院系统Digital Tuning System 数字调谐系统Digital Televisio n Sta ndard 数字电视标准DVB Digital Video Broadcast ing 数字视频广播DVC Digital Video Compressio n 数字视频压缩DVE Digital Video Effect 数字视频特技DVS Desktop Video Studio 桌上视频演播DVTR Digital Video Tape Recorder 数字磁带录像机EA Exte nsion Ampl ifier 延长放大器EB Electro n Beam 电子束EBS Emerge ncy Broadcast ing System 紧急广播系统EBU European Broadcast ing Un io n 欧洲广播联盟EC Error Correctio n 误差校正ECN Emerge ncy Comm un icati ons Network 应急通信网络ECS European Comm un icatio n Satellite 欧洲通信卫星EDC Error Detection Code 错误检测码EDE Electro nic Data Excha nge 电子数据交换EDF Erbium-Doped Fiber 掺饵光纤EDFA Erbium-Doped Fiber Amplifier 掺饵光纤放大器EDL Edit Decisi on List 编辑点清单EDTV Exte nded Defi niti on Televisi on 扩展清晰度电视EE Error Excepted 允许误差EFM Eight to Fourteen Modulation 8-14 调制EFP Electro nic Field Production 电子现场节目制作EH Ether net Hosts 以太网主机EIN Equivale nt m put Noise 等效输入噪声EIS Electro nic In formation System 电子信息系统EISA Exte nded In dustrial Sta ndard Architecture扩展工业标准总线EL Electro-Lum in esce nt 场致发光EM Error Mo nitori ng 误码监测EN End Node 末端节点ENG Electro nic News Gatheri ng 电子新闻采集EOT End of Tape 带尾EP Edit Poi nt 编辑点Error Protocol 错误协议EPG Electro nic Program Guides 电子节目指南EPS Emerge ncy Power Supply 应急电源ERP Effective Radiated Power 有效辐射功率ES Eleme ntary Stream 基本码流End System 终端系统ESA European Space Age ncy 欧洲空间局ETV Educati on Televisio n 教育电视FA Enhan ced Televisio n 增强电视FABM FAS Facial An imatio n 面部动画FC Fiber Amp li fier Booster Module 光纤放大器增强模块Fiber Access System 光纤接入系统Freque ncy Chan ger 变频器FCC Fiber Cha nnel 光纤通道FD Film Composer 电影编辑系统Federal Comm un icatio ns Commissio n 美国联邦通信委员会FDCT Freque ncy Divider 分频器FDDI FDM Fiber Duct 光纤管道FDP Forward Discrete Cos ine Tran sform 离散余弦正变换FE Fiber Distributed Data In terface 分布式光纤数据接口Freque ncy-Divisi on Multiplexi ng 频分复用中国电子学会中国信息基通用中间格式中国工业标准。
模式识别论文(Pattern recognition)
模式识别论文(Pattern recognition)Face recognition based on sparse representationImage sparse representation of the image processing in the exergy is very suitable for image sparse representation of the image obtained by decomposition of gaugeThe calculations are enormous. Using MP implementation method based on image sparse decomposition algorithm using genetic algorithm for fast exergy processThe best atom is decomposed at each step.The problem of face recognition is a classical pattern recognition problem. In recent years by the Exergy Theory of compressed sensing based on dilute inspired exergySparse representation of face recognition technology has been extensively studied. Face recognition based on sparse representation is the construction of words using training picturesThe sparse linear combination coefficients and exergy exergy code by solving an underdetermined equation to obtain the test images according to these coefficientsThe image recognition classification.Keywords image processing in the sparse representation of the MP within the genetic algorithm of sparse decompositionFace, recognition, via, sparse, representationAbstract:, sparse, representation, of, images, is, very, suitable,, for, image, processing,But, the, computational, burden, in, sparse, decomposition, process, image, is, huge,, A, newFast, algorithm, was, presented, based, on, Matching, Pursuit (MP), image, sparseDecomposition. At, first, Genetic, Algorithms (GA), was, applied, to, effectively, searchIn, the, dictionary, of, atoms, for, the, best, atom, at, each,, step, of, MPFace, recognition, problem, is, a, classic, problem, of, pattern,, recognition., In, recentYears, inspired, by, the, theory, of, perception, is, compressed, sparseRepresentation-based, face, recognition, technology, has, been, widely, studied., FaceRecognition, based, on, sparse, representation, is, to, take, advantage,, of, the, trainingImages, constructed, dictionary, owed, by, solving, a, the, most,, sparse, linear, combinationCoefficients, given, equation, to, obtain, the, test, images, then, these, coefficients, toIdentify image classification.Key words: image processing; sparse representation; sparse decomposition;Matching Pursuit; Genetic Algorithms0 Introduction the current face recognition technology of rapid development especially the exergy basedStatic face detection and recognition, and face feature extractionMulti face recognition based on multi pose has been achievedA great deal of research. But the exergy exergy in more complex environmentsSuch as facial expression recognition, illumination compensation and Guang ZhaomoThe establishment of the model, the treatment of age changes, and a variety of testing dataThere is a lack of effective methods for fusion.Face recognition includes three steps in face detectionMeasurement, face feature extraction, face recognition and verification. There arePeople on thisExtension of the exergy based on the above three stepsOn Exergy increased early standardization, and correction and later pointsClass and management these two steps.The research of face recognition started in the late 1960sL2]. Has experienced 40 years of development. Roughly divided into threeThree stages:The first stage is the initial stage from 60s to the end of exergyLate 80s. The main technique adopted at that time was baseTo set the structure characteristics of the face recognition method of exergy isAs a general pattern recognition problem is studied. generationThe figures include Bledsoe (Bledsoe) and Gordon Stein(Goldstein), Harmon (Harmon), and Kim Wu Hsiung(KanadeTakeo) et al. At that time almost all were identifiedThe process relies on manual operation and results in no exergy into very important practical applications in not many basically noHave practical application.The second stage is in the exploration stage from 70s to eightThe ten age. During this period, as well as engineers in the smokeLead neuroscientists and psychologists to the fieldResearch. The former is mainly through the perception mechanism of the human brainTo explore the possibility in automatic face recognition while the orderSome theoretical obtained has some defects and partial nature but inEngineering techniques for design and implementation of algorithms and systemsThe personnel have the important theory instructionsignificance.The third stage is the stage of rapid development in the last century from the nineFrom the ten to the present. Computer vision and pattern recognition technologyIn the rapid development of computer image processing technology and drivesThe rapid development of face recognition. Governments are also heavily financedIn the study of face recognition and achieved fruitful results.Among them, Eigenfaee and Fisherface is this momentThe most representative, the most significant achievements of the twoThree kinds of face recognition algorithms have become the base of face recognitionAlgorithms and industrial standards.1 sparse representation of the mathematical form of sparse representation of the face recognition problem is represented mathematicallyF = A X Y is in the m where Y is the dimension of natural channelNo, A is also known from a predefined dictionary based X is a natural increase.The n-dimensional sparse representation of signals under predefined bases. KnownBased on the original signal by solving its in the predefined baseIn the sparse representation is a sparse encoding problem in the following twoSolution method]3-1 [fSparse encoding f sparse regularization constraints K||X|| S.T. ||AX-Y||argmin0?The 22 rate in XThe error constrained sparse encoding exergy in FRate of 220 ||AX-Y|| S.T. ||X||argmin?XType F XIs the original signal Y, under the predefined baseThe sparse representation coefficient of exergy is share error tolerance share K is sparseShare threshold 0||The || said in that the number of columns of 0l norm vector 0Number of elements.Sparse coding and compressed sensing reconstruction of signals haveThat rate and the minimum eight norm can be very goodRestructure。
基于最小二乘法的改进的随机椭圆检测算法

第42卷第8期2008年8月浙 江 大 学 学 报(工学版)Journal of Zhejiang University(Engineer ing Science)Vol.42No.8Aug.2008收稿日期:2007205218.浙江大学学报(工学版)网址:/eng基金项目:宁波市科技计划资助项目(2006B100027).作者简介:陈海峰(1982-),男,浙江台州人,硕士生,从事数字图像处理工作.E 2mail:optical.dlz@通讯联系人:冯华君,男,教授,博导.E 2mail:fen ghj@DOI:10.3785/j.issn.10082973X.2008.08.015基于最小二乘法的改进的随机椭圆检测算法陈海峰1,雷 华1,孔燕波2,周柳云2,冯华君1(1.浙江大学现代光学仪器国家重点实验室,浙江杭州310027;2.宁波华光精密仪器有限公司,浙江宁波315153)摘 要:为了提高数字图像中椭圆检测的效率和准确性,提出了一个基于最小二乘法的改进的随机椭圆检测算法.该算法随机选取图像中的3个边缘点,在以这3个点为中心的窗口内,从边缘点中拟合出可能椭圆,并通过随机选取的第4个边缘点来确认可能椭圆.利用直接最小二乘法椭圆拟合的特性,引入可能椭圆边缘点收集和椭圆重新拟合的迭代过程来提取最终的椭圆参数.通过对含有不同噪声的仿真图片和包括残缺椭圆的实际图片的实验表明,新算法的改进是有效的.与原算法相比,新算法降低了对参数的依赖性,提高了检测的速度、稳定性和准确性,同时保留了原算法的抗噪声能力.关键词:椭圆检测;随机检测;最小二乘法中图分类号:T P391 文献标识码:A 文章编号:10082973X(2008)0821360205An improved randomized algorithm for detecting ellipsesbased on least square approachCH EN Hai 2feng 1,LEI H ua 1,KONG Yan 2bo 2,ZHOU Liu 2yun 2,FENG Hua 2jun 1(1.State Key Labor a tory of Moder n Optica l I nstr umentation ,Zhej ia ng Univer sity,H a ngz hou 310027,China ;2.H ua guang P recision I nstr ument Co.Ltd.,N ingbo 315153,China)Abstr act:An improved randomized ellipse detection algorithm based on least square approach was proposed to enhance the efficiency and accuracy of ellipse detection in digital images.T his algorithm r andomly se 2lects three edge points in the image,and then uses least squar e approach to fit all the edge points in three windows,which are defined by the three edge points.T he forth edge point is randomly selected to judge whether a possible ellipse exists in the image.Utilizing the char acteristic of direct least square fitting of ellipse,an iteration process of edge point collecting and ellipse refitting of possible ellipse was introduced to extract the final ellipse .s parameters.A rtificial images with different levels of noise and nature images containing incomplete ellipses were employed to test this algor ithm.Experimental results show that the impr ovements are pared with the original algorithm,the proposed algorithm reduces the de 2pendence on arguments of detection algorithm,and enhances the speed,stability and accuracy of ellipse de 2tection,while preserves the anti 2noise ability of the original algorithm.Key words:ellipse detection;randomized detection;least square approach 椭圆检测在模式识别领域一直是研究的热点.在过去的20多年中,人们提出了很多椭圆检测算法.例如:基于H ough 变换及其改进算法的椭圆检测算法、最小二乘拟合算法、基于随机抽样一致性(random sample consensus,RA NSA C)思想的算法、遗传算法以及结合椭圆几何特性的算法.这些算法大致可以分为投票(类聚)和最优化2大类.H ough变换、RANSAC算法都是采用映射的方法,将样本点映射到参数空间,采用累加器或者类聚的方法来检测椭圆.这类算法具有很好的健壮性,能够一次检测多个椭圆,但是需要复杂的运算和大量的存储空间.最优化方法包括最小二乘拟合算法、遗传算法以及其他最优化椭圆拟合方法.这类方法的主要特点在于准确性高,但是通常需要预先进行分割或分组处理,无法直接用于多个椭圆的检测,对噪声的敏感程度高于前一类方法.近年来,人们对椭圆检测的研究大多在数据点收集、椭圆真伪的验证和各类方法相互结合的方向上展开.Cheng等人[1]提出的受限随机Hough变换(restricted randomized H ough transform,RRH T),限制了点选取的范围,有效缩短了算法运行的时间,提高了算法的效率.Qiao等人[2]推荐的基于圆弧的椭圆验证方法极大地减少了虚假椭圆的输出.Li等人[324]提出的随机椭圆检测(randomized ellipse de2 tection,RED)方法,巧妙地结合了最小二乘法和随机H ough变换的优点,实现了基于随机H ough变换并利用最小二乘法进行椭圆拟合的检测方法,该方法不需要占用大量的存储空间,另外对噪声不敏感,能够快速检测多个椭圆.本文首先分析了RED算法,针对基于直接最小二乘法的椭圆拟合的特点,引入了一个可能椭圆边缘点收集和椭圆重新拟合的迭代过程,提出了一种基于最小二乘法的改进的随机椭圆检测算法,解决了原算法中存在的问题.通过对具有不同噪声的仿真图片和实际图片的实验,验证了算法改进的有效性.1RED算法1.1RED算法介绍RED方法首先随机选取3个边缘点,并分别以这3个边缘点为中心,定义具有相同大小的窗口,利用最小二乘法把这3个窗口中的所有边缘点拟合成一个假设存在的椭圆.然后在图像中随机选取第4个边缘点,判断这个点是否在假设的椭圆上.如果是,则椭圆存在的可能性较大,接着引入证据收集过程来验证椭圆是否真实存在.算法步骤如下.1)将所有边缘点p i=(u i,v i)加入集合V中.初始化失败,计数器f=0.令T f、T em、T a、T d、T r分别为给定的5个阈值.T f表示能够容忍的最大失败次数.n p表示集合V中边缘点的数量,当其与图片中边缘点总数的比值小于T em时,终止椭圆检测算法.在可能椭圆上选中的任意两点之间的距离必须大于阈值T a.T d表示所选的第4点到可能椭圆边界的距离的阈值.T r为椭圆残缺率阈值.2)当f=T f或者n p<T em时,算法终止;否则,随机从V中选择4个点p i(i=1,2,3,4),然后从V 中除去所选的4个点,V=V-{p i}.3)根据选中的4个边缘点求出可能的椭圆,保证在选中的用于求解椭圆参数的3个点中任意2个点之间的距离都大于T a,同时第4个点到可能椭圆边界的距离不能超过T d.否则,将p i(i=1,2,3,4)返回到V中,f=f+1,跳转到步骤2).4)假设E ijk是可能的一个椭圆.设计数器n=0.对于V中的点p m,检查它到椭圆E ijk边界的距离是否小于阈值T d.如果是,则n=n+1,并将p m从V 中去除.在遍历V中所有点之后,得到n e=n,即为满足阈值T d的边缘点的个数.5)如果n e\T r#C ij k,其中C ij k是可能椭圆E ijk 的周长,则跳转到步骤6).在其他情况下,认为这个可能的椭圆不是一个真实的椭圆,将步骤4)中的n e 个边缘点返回到V中,f=f+1,跳转到步骤2).6)可能存在的椭圆E ijk被证实是真实存在的一个椭圆.将f重置,跳转到步骤2).1.2RED算法中存在的问题RED算法使用直接最小二乘法椭圆拟合(di2 rect least squares fitting of ellipse)算法来求解可能椭圆的参数.H alir等人[5]指出由于该拟合算法是基于代数距离而非几何距离的,因而当拟合含有噪声的椭圆弧时,得到的椭圆通常偏小.当拟合图像中的椭圆数据点时,由于算法本身就有这种倾向,若选取的3个窗口中心点之间的距离较近,加上图像光栅化的影响(图像中椭圆的边缘点相对于理想的边缘点而言噪声总是存在的),拟合出来的椭圆和真实的椭圆差别很大.Li等人的算法只能依靠在提取可能椭圆时,随机选取的3点之间保持适当的距离,和在椭圆确认过程中使用较大的值来解决这个拟合算法带来的问题.但是这种处理方法在实际处理过程中存在较为明显的缺陷.1)算法的效率严重地依赖于参数T a,不合适的T a不仅增加了算法中证据收集的计算量,还会浪费很多有效采样次数.而且合适的T a值会随着被检测椭圆的大小发生变化,因此当处理包含大小差异较大的椭圆图形的图片时,T a的值难以确定.2)当T a取不到合适的值,T r又无法选取较大1361第8期陈海峰,等:基于最小二乘法的改进的随机椭圆检测算法的数值时(也就是处理包含大小差别较大的残缺椭圆的图像),采用直接椭圆拟合算法得到的偏小的可能椭圆,会因为较小的T r 值而被算法确认为真椭圆,从而产生误检.由于在检测到一个椭圆后,算法会将在这个椭圆上的边缘点去除,这种误检就可能导致一个真实存在的椭圆被分割成数个椭圆弧,继而引发更多的误检,使得算法的检测效率很低.3)算法只考虑了当选取的点之间距离较近时会拟合出虚假的椭圆,没有排除当距离过大时算法会从不同椭圆弧中拟合出虚假椭圆的情况.后一种情况会当T r 较小时,被算法确认为真椭圆,降低算法检测的效率.2 改进的RED 算法2.1 改进的椭圆提取过程在RED 算法的实际拟合过程中,用来拟合的边缘点始终位于最后拟合出来的椭圆的边界上.假设这些边缘点位于一个真实的椭圆上,那么可以选择适当的代数距离来收集距离拟合出的可能椭圆边界一定范围内的边缘点:D =|au 2+buv +cv 2+du +ev +1|.然后通过重新收集和重新拟合的迭代过程来找出这个真实的椭圆.通过此过程,无须事先找出最适合的T a ,只要将选取的3个点之间的距离控制在一定的范围即可.在新的提取过程中,求取适当的代数距离阈值非常关键.一般来说,如果一个点位于椭圆上,那么理想的D 值应该为零.实际上,由于图像是光栅化的,边缘上的点几乎不可能准确地落在椭圆的边界上.图1显示了一系列椭圆的D 值的最大值和平均值.这些椭圆的长轴、短轴、中心位置都是一致的,惟一不同的就是椭圆长轴和X 轴的夹角.图1 D 2H 曲线Fig.1 D 2H curves从图1中不难看出,在实际情况下,光栅化后椭圆的D 值大小随H 发生很大的变化.因此,本算法使用可能椭圆E ij k 求解自适应阈值T d :T d =|au 2A +bu A v A +vc 2A +d u A +ev A +1|,u A =u 0+(A +d diff )#cos U ,v A =v 0+(A +d diff )#sin U .式中:u 0、v 0为椭圆的中心点坐标,d d if f 为点到椭圆边界的最大距离,A 、U 分别为椭圆的长轴长度和椭圆的偏转角度.在迭代过程中,需要考虑在边缘二值图像中噪声的影响.过量的噪声将会延长迭代收敛的过程,因此在执行之前需要将这些噪声点从边缘图像中去除.本文采用黎自强等人[6]提出的去除孤立和半连续噪声点的方法.这两类噪声点的定义如下:在图像空间中,若P i (u i ,v i )的8个相邻点都不是图像点,则称P 为孤立噪声点.若P i (u i ,v i )的4@4邻域满足:1)边界点都不是图像点;2)除了P i (u i ,v i ),在其相邻点中还有1~3个图像点,则称P 为半连续噪声点.2.2 改进算法的具体步骤改进的RED 算法只须在原有算法的步骤5)和6)中插入新的椭圆提取过程.具体流程如下.1)初始化T =0;设置最大迭代次数T t 和最小变化率T n ,用于算法的终止;将n e 的值赋给n old .2)用收集来的位于可能椭圆边界附近的边缘点组成的可能椭圆边界点集合V e 来重新拟合可能椭圆E ijk ;T =T +1.3)根据可能椭圆E ijk 求解T d 的大小;遍历集合V 中的边缘点,寻找D [T d 的边缘点,更新n e 和可能椭圆边界点集合V e ,并将n e 赋给n new ;如果|n new -n o ld |/n old >T n 并且T <T t ,则跳转到步骤2);否则算法终止,V =V -V e ;输出椭圆参数.3 实验结果在一台Celeron 2.0GH z 的计算机上利用Matlab 6.5对改进的RED 算法进行了仿真图片和实际图片的实验.主要分析算法改进前后检测的时间、准确率[7]和抗噪声的能力.对于每一副图片,取100次检测的结果作为样本.选用的参数在各个实验中分别给出.在下面的图表中用Orig 表示原RED 算法,Mod 表示改进的RED 算法.实验1 分别用原RED 算法和改进的RED 算法对3幅640@480的仿真图片进行检测,如图2(a)所示.其中图片1含有3个不同方向的完整椭圆;图片2含有3个不同方向的重叠的椭圆;图片3含有3个不同方向的部分重叠的椭圆弧,并且这些1362浙 江 大 学 学 报(工学版)第42卷图2 改进的RED 算法与原RED 算法的检测结果(仿真图片)F ig.2 Detection results of improved RED algorithmand original RED algor ithm (a rtificial image)图片中包含的3个椭圆的大小差别较大.根据文献[4],实验选取T r =0.5,在原RED 算法中根据符合图片中最小残缺椭圆的检测要求,选取T a =30,算法的具体参数如表1所示.表1 实验选用的各个参数Tab.1 Arguments used in experiment 1实验T fT aOr igModT rT em d diff 实验1、250003030~3600.50.15实验350003030~1200.50.3(图片4)0.1(图片5)5图2(b)、(c)列出了原RED 算法和改进的RED 算法的检测结果.检测到的椭圆用粗线重绘,加号表示椭圆中心点位置.表3进一步给出了2个算法比较的结果,包括算法检测的最短时间t min 、最长时间t max 、平均时间t avg 、标准时间t std 和准确率p acc .在本文设定的实验例子中,原RED 算法无法继续使用T a 、T r 的限制来解决拟合算法带来的问题,导致整个椭圆算法运行时间较长,稳定性不佳,有较多误检的情况影响其他真实存在椭圆的检测.改进的RED 算法很好地解决了拟合算法带来的问题,无论在准确性、稳定性上,还是在检测速度上都超越了原RED 算法.实验2 检测改进的RED 算法抗椒盐噪声的能力.选用实验1中使用的仿真图片,在实验中加入的椒盐噪声的数量为N no ise ,从边缘点数量的1倍逐渐增加到6倍.为保证对照的有效性,原RED 算法处理的图片同样经过了前面提到的剔除2类噪声的处理.算法的参数和实验1相同.结果如图3和4所示.可以看出,改进的RED 算法在3倍噪声以内时表现非常出色,在超过这个范围之后,算法的准确性和消耗的时间都有所恶化,但是依然好于原RED 算法.实验3 选用实际的图片对改进的RED 算法进行测试,原RED 算法作为对照.图片大小均为640@480,图片4包含多个大小、方向各异,残缺度不同的椭圆,图片5包含多个偏心率接近零的椭圆,如图5(a)所示.实验中选用绝对误差模板(absolute differ 2ence mask,AD M)算法[8]作为边缘检测算子.同样选取T r =0.5,T a =30,T em 值则按照实际情况做了调整,具体参数见表1.实验结果如表2与图5所示.表2 改进的RED 算法与原RED 算法的性能比较Tab.2 Per for mance comparison of improved R ED algorithm and or igina l RED algorithm图片t min /s Or ig Mod t ma x /s Or ig Mod t avg /s Orig Mod t std /s Orig Mod p a cc /%Or ig Mod 10.0790.04632.550.6109.5770.2088.9000.12874.00100.020.0810.05924.85 1.1138.9000.267 6.8390.17253.33100.030.0840.05831.28 1.667 6.4440.3807.2870.25963.3399.674 6.235 1.29757.4714.7027.139.7559.820 2.11647.4790.00510.930.55966.063.53735.421.57511.880.64153.4089.691363第8期陈海峰,等:基于最小二乘法的改进的随机椭圆检测算法4结语本文对原有的基于最小二乘法的随机椭圆检测方法进行了改进.新方法在确认一个可能椭圆之后,使用自适应的T d阈值搜索边缘图片中距离可能椭圆边界一定范围内的点,并拟合出一个新的可能椭圆.通过重复上述搜索和重新拟合过程,准确地找到了图片中的椭圆.对仿真图片和实际图片的实验表明,改进算法有效解决了原方法存在的问题.使得算法对参数T a、T r的依赖程度大大下降,改善了算法对不同情况的适应性.新算法在提高检测的速度、稳定性和准确性的同时,保留了原算法抗噪声的能力.参考文献(References):[1]CHENG Zi2guo,LIU Yun2cai.Efficient technique forellipse detection using restrict ed randomized Hough tr ansfor m[C]M P roceedings of the I nter national Confer2 ence on Infor mation Technology:Coding a nd Computing.Las Vegas:IEEE,2004,2:7142718.[2]QI AO Yu,ONG S H.Ar c2based evaluat ion and detec2tion of ellipse[J].P atter n R ecognition,2007,40(7): 199022003.[3]LI Liang2fu,FENG Zu2r en,H E Kai2liang.A r andom2ized a lgorithm for detecting multiple ellipses based on least squar e approach[J].Opto2electr onics R eview, 2005,13(1):61267.[4]李良福,冯祖仁,贺凯良.一种基于随机H ough变化的椭圆检测算法研究[J].模式识别与人工智能,2005,18(4):4592464.LI Liang2fu,F ENG Zu2r en,H E Kai2liang.An im2 proved algorithm for ellipses det ection based on r andom2 ized H ough tr ansfor m[J].Pa tter n Recognition and Ar ti2 ficial Intelligence,2005,18(4):4592464.[5]HALIR R,FLUSSER J.Numerically st able dir ect leastsquar es fitting of ellipses[C]M Pr oceedings of the6th Inter national Conference in Centr al Eur ope on Computer Graphics a nd Visualization.Plzen:Univer sity of West Bohemia,1998:1252132.[6]黎自强,腾弘飞.广义Hough变换:多圆的快速随机检测[J].计算机辅助设计与图形学学报,2006,18(1): 27233.LI Zi2qiang,TENG H ong2fei.Generalized Hough tr ans2 form:fast randomized multi2circle detect ion[J].Com2 puter Aided Design and Computer Gra phics,2006,18(1):27233.[7]MCLAUGH LIM R A.Randomized Hough t ransform:impr oved ellipse detection with comparison[J].Patter n Recognition Letters,1998,19(3):2992305.[8]ZHANG Si2cheng,LIU Zhi2qiang.A r obust,real2t imeellipse detector[J].Patter n Recognition,2005,38(2): 2732287.1364浙江大学学报(工学版)第42卷。
电子信息工程专业英语教程_第5版 题库
《电子信息工程专业英语教程(第5版)》题库Section A 术语互译 (1)Section B 段落翻译 (5)Section C阅读理解素材 (12)C.1 History of Tablets (12)C.2 A Brief History of satellite communication (13)C.3 Smartphones (14)C.4 Analog, Digital and HDTV (14)C.5 SoC (15)Section A 术语互译Section B 段落翻译Section C阅读理解素材C.1 History of TabletsThe idea of the tablet computer isn't new. Back in 1968, a computer scientist named Alan Kay proposed that with advances in flat-panel display technology, user interfaces, miniaturization of computer components and some experimental work in WiFi technology, you could develop an all-in-one computing device. He developed the idea further, suggesting that such a device would be perfect as an educational tool for schoolchildren. In 1972, he published a paper about the device and called it the Dynabook.The sketches of the Dynabook show a device very similar to the tablet computers we have today, with a couple of exceptions. The Dynabook had both a screen and a keyboard all on the same plane. But Key's vision went even further. He predicted that with the right touch-screen technology, you could do away with the physical keyboard and display a virtual keyboard in any configuration on the screen itself.Key was ahead of his time. It would take nearly four decades before a tablet similar to the one he imagined took the public by storm. But that doesn't mean there were no tablet computers on the market between the Dynabook concept and Apple's famed iPad.One early tablet was the GRiDPad. First produced in 1989, the GRiDPad included a monochromatic capacitance touch screen and a wired stylus. It weighed just under 5 pounds (2.26 kilograms). Compared to today's tablets, the GRiDPad was bulky and heavy, with a short battery life of only three hours. The man behind the GRiDPad was Jeff Hawkins, who later founded Palm.Other pen-based tablet computers followed but none received much support from the public. Apple first entered the tablet battlefield with the Newton, a device that's received equal amounts of love and ridicule over the years. Much of the criticism for the Newton focuses on its handwriting-recognition software.It really wasn't until Steve Jobs revealed the first iPad to an eager crowd that tablet computers became a viable consumer product. Today, companies like Apple, Google, Microsoft and HP are trying to predict consumer needs while designing the next generation of tablet devices.C.2 A Brief History of satellite communicationIn an article in Wireless World in 1945, Arthur C. Clarke proposed the idea of placing satellites in geostationary orbit around Earth such that three equally spaced satellites could provide worldwide coverage. However, it was not until 1957 that the Soviet Union launched the first satellite Sputnik 1, which was followed in early 1958 by the U.S. Army’s Explorer 1. Both Sputnik and Explorer transmitted telemetry information.The first communications satellite, the Signal Communicating Orbit Repeater Experiment (SCORE), was launched in 1958 by the U.S. Air Force. SCORE was a delayed-repeater satellite, which received signals from Earth at 150 MHz and stored them on tape for later retransmission. A further experimental communication satellite, Echo 1, was launched on August 12, 1960 and placed into inclined orbit at about 1500 km above Earth. Echo 1 was an aluminized plastic balloon with a diameter of 30 m and a weight of 75.3 kg. Echo 1 successfully demonstrated the first two-way voice communications by satellite.On October 4, 1960, the U.S. Department of Defense launched Courier into an elliptical orbit between 956 and 1240 km, with a period of 107 min. Although Courier lasted only 17 days, it was used for real-time voice, data, and facsimile transmission. The satellite also had five tape recorders onboard; four were used for delayed repetition of digital information, and the other for delayed repetition of analog messages.Direct-repeated satellite transmission began with the launch of Telstar I on July 10, 1962. Telstar I was an 87-cm, 80-kg sphere placed in low-Earth orbit between 960 and 6140 km, with an orbital period of 158 min. Telstar I was the first satellite to be able to transmit and receive simultaneously and was used for experimental telephone, image, and television transmission. However, on February 21, 1963, Telstar I suffered damage caused by the newly discovered Van Allen belts.Telstar II was made more radiation resistant and was launched on May 7, 1963. Telstar II was a straight repeater with a 6.5-GHz uplink and a 4.1-GHz downlink. The satellite power amplifier used a specially developed 2-W traveling wave tube. Along with its other capabilities, the broadband amplifier was able to relay color TV transmissions. The first successful trans-Atlantic transmission of video was accomplished with Telstar II , which also incorporated radiation measurements and experiments that exposed semiconductor components to space radiation.The first satellites placed in geostationary orbit were the synchronous communication (SYNCOM ) satellites launched by NASA in 1963. SYNCOM I failed on injection into orbit. However, SYNCOM II was successfully launched on July 26, 1964 and provided telephone, teletype, and facsimile transmission. SYNCOM III was launched on August 19, 1964 and transmitted TV pictures from the Tokyo Olympics. The International Telecommunications by Satellite (INTELSAT) consortium was founded in July 1964 with the charter to design, construct, establish, and maintain the operation of a global commercial communications system on a nondiscriminatory basis. The INTELSAT network started with the launch on April 6, 1965, of INTELSAT I, also called Early Bird. On June 28, 1965, INTELSAT I began providing 240 commercial international telephone channels as well as TV transmission between the United States and Europe.In 1979, INMARSAT established a third global system. In 1995, the INMARSAT name was changed to the International Mobile Satellite Organization to reflect the fact that the organization had evolved to become the only provider of global mobile satellite communications at sea, in the air, and on the land.Early telecommunication satellites were mainly used for long-distance continental and intercontinental broadband, narrowband, and TV transmission. With the advent of broadband optical fiber transmission, satellite services shifted focus to TV distribution, and to point-to-multipoint and very small aperture terminal (VSAT) applications. Satellite transmission is currently undergoing further significant growth with the introduction of mobile satellite systems for personal communications and fixed satellite systems for broadband data transmission.C.3 SmartphonesThink of a daily task, any daily task, and it's likely there's a specialized, pocket-sized device designed to help you accomplish it. You can get a separate, tiny and powerful machine to make phone calls, keep your calendar and address book, entertain you, play your music, give directions, take pictures, check your e-mail, and do countless other things. But how many pockets do you have? Handheld devices become as clunky as a room-sized supercomputer when you have to carry four of them around with you every day.A smartphone is one device that can take care of all of your handheld computing and communication needs in a single, small package. It's not so much a distinct class of products as it is a different set of standards for cell phones to live up to.Unlike many traditional cell phones, smartphones allow individual users to install, configure and run applications of their choosing. A smartphone offers the ability to conform the device to your particular way of doing things. Most standard cell-phone software offers only limited choices for re-configuration, forcing you to adapt to the way it's set up. On a standard phone, whether or not you like the built-in calendar application, you are stuck with it except for a few minor tweaks. If that phone were a smartphone, you could install any compatible calendar application you like.Here's a list of some of the things smartphones can do:•Send and receive mobile phone calls•Personal Information Management (PIM) including notes, calendar and to-do list•Communication with laptop or desktop computers•Data synchronization with applications like Microsoft Outlook•E-mail•Instant messaging•Applications such as word processing programs or video games•Play audio and video files in some standard formatsC.4 Analog, Digital and HDTVFor years, watching TV has involved analog signals and cathode ray tube (CRT) sets. The signal is made of continually varying radio waves that the TV translates into a picture and sound. An analog signal can reach a person's TV over the air, through a cable or via satellite. Digital signals, like the ones from DVD players, are converted to analog when played on traditional TVs.This system has worked pretty well for a long time, but it has some limitations:•Conventional CRT sets display around 480 visible lines of pixels. Broadcasters have been sending signals that work well with this resolution for years, and they can't fit enough resolution to fill a huge television into the analog signal.•Analog pictures are interlaced - a CRT's electron gun paints only half the lines for each pass down the screen. On some TVs, interlacing makes the picture flicker.•Converting video to analog format lowers its quality.United States broadcasting is currently changing to digital television (DTV). A digital signal transmits the information for video and sound as ones and zeros instead of as a wave. For over-the-air broadcasting, DTV will generally use the UHF portion of the radio spectrum with a 6 MHz bandwidth, just like analog TV signals do.DTV has several advantages:•The picture, even when displayed on a small TV, is better quality.• A digital signal can support a higher resolution, so the picture will still look good when shown on a larger TV screen.•The video can be progressive rather than interlaced - the screen shows the entire picture for every frame instead of every other line of pixels.•TV stations can broadcast several signals using the same bandwidth. This is called multicasting.•If broadcasters choose to, they can include interactive content or additional information with the DTV signal.•It can support high-definition (HDTV) broadcasts.DTV also has one really big disadvantage: Analog TVs can't decode and display digital signals. When analog broadcasting ends, you'll only be able to watch TV on your trusty old set if you have cable or satellite service transmitting analog signals or if you have a set-top digital converter.C.5 SoCThe semiconductor industry has continued to make impressive improvements in the achievable density of very large-scale integrated (VLSI) circuits. In order to keep pace with the levels of integration available, design engineers have developed new methodologies and techniques to manage the increased complexity inherent in these large chips. One such emerging methodology is system-on-chip (SoC) design, wherein predesigned and pre-verified blocks often called intellectual property (IP) blocks, IP cores, or virtual components are obtained from internal sources, or third parties, and combined on a single chip.These reusable IP cores may include embedded processors, memory blocks, interface blocks, analog blocks, and components that handle application specific processing functions. Corresponding software components are also provided in a reusable form and may include real-time operating systems and kernels, library functions, and device drivers.Large productivity gains can be achieved using this SoC/IP approach. In fact, rather than implementing each of these components separately, the role of the SoC designer is to integrate them onto a chip to implement complex functions in a relatively short amount of time.The integration process involves connecting the IP blocks to the communication network, implementing design-for-test (DFT) techniques and using methodologies to verify and validate the overall system-level design. Even larger productivity gains are possible if the system is architected as a platform in such as way that derivative designs can be generated quickly.In the past, the concept of SoC simply implied higher and higher levels of integration. That is, it was viewed as migrating a multichip system-on-board (SoB) to a single chip containing digital logic, memory, analog/mixed signal, and RF blocks. The primary drivers for this direction were the reduction of power, smaller form factor, and lower overall cost. It is important to recognize that integrating more and more functionality on a chip has always existed as a trend by virtue of Moore’s Law, which predicts that the number of transistors on a chip will double every 18-24 months. The challenge is to increase designer productivity to keep pace with Moore’s Law. Therefore, today’s notion of SoC is defined in terms of overall productivity gains through reusable design and integration of components.。
海康威视 DS-2TD62PD-NPTL W 热成像与光成像双光谱网络位置定位系统说明书
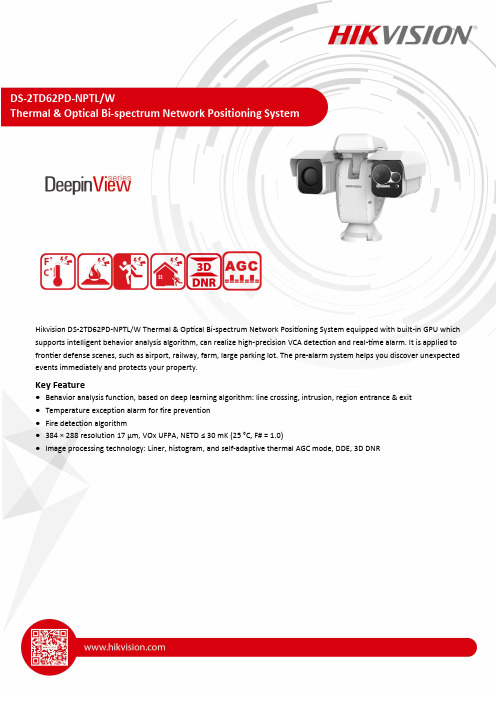
Hikvision DS-2TD62PD-NPTL/W Thermal & Op cal Bi-spectrum Network Posi oning System equipped with built-in GPU which supports intelligent behavior analysis algorithm, can realize high-precision VCA detec on and real- me alarm. It is applied to fron er defense scenes, such as airport, railway, farm, large parking lot. The pre-alarm system helps you discover unexpected events immediately and protects your property.Key Feature● Behavior analysis function, based on deep learning algorithm: line crossing, intrusion, region entrance & exit ● Temperature exception alarm for fire prevention ● Fire detection algorithm● 384 × 288 resolution 17 μm, VOx UFPA, NETD ≤ 30 mK (25 °C, F# = 1.0)● Image processing technology: Liner, histogram, and self-adaptive thermal AGC mode, DDE, 3D DNRSpecificationDRI Range Table* The table is only for reference and the performance may vary according to different environment.* The optimal human detection, recognition, and identification distances are calculated according to Johnson ’s Criteria. Detection Range: In order to distinguish an object from the background, the object must be covered by 1.5 or more pixels. Recognition Range: In order to classify the object (animal, human, vehicle, etc.), the object must be covered by 6 or more pixels.Identification Range: In order to identify the object and describe it in details, the object must be covered by 12 or more pixels..Detection Range (Vehicles: 1.4 × 4.0 m) Detection Range (Humans: 1.8 × 0.5 m) Recognition Range (Vehicles: 1.4 × 4.0 m) Recognition Range (Humans: 1.8 × 0.5 m) Identification Range (Vehicles: 1.4 × 4.0 m) Identification Range (Humans: 1.8 × 0.5 m) 4510 m1471 m1127 m368 m564 m184 mSmart Function Table*The table is only for reference and the performance may vary according to different environment.DimensionCOMPLIANCE NOTICE: The thermal series products might be subject to export controls in various countries or regions, includingwithout limitation, the United States, European Union, United Kingdom and/or other member countries of the Wassenaar Arrangement. Please consult your professional legal or compliance expert or local government authorities for any necessaryexport license requirements if you intend to transfer, export, re-export the thermal series products between different countries.。
基于看图对话工具的健康教育在2型糖尿病患者中的应用效果

临床护理DOI:10.16662/ki.1674-0742.2024.06.144基于看图对话工具的健康教育在2型糖尿病患者中的应用效果徐子清,陈银峰,苏雪清厦门大学附属第一医院,福建厦门361000[摘要]目的分析基于看图对话工具的健康教育在2型糖尿病(Diabetes Mellitus Type 2, T2DM)患者中的应用效果。
方法随机选取2021年1月—2022年12月厦门大学附属第一医院收治的120例T2DM患者为研究对象,使用随机数表法将其分为两组,每组60例。
对照组患者接受常规健康教育,研究组患者采用基于看图对话工具的健康教育模式。
对比两组患者的T2DM健康知识认知情况评分、T2DM自我管理行为量表(Diabete Self Care Scale, DSCS)评分、健康调查简表(MOS Item Short from Health Survey, SF-36)评分,以及护理满意度。
结果研究组患者对于T2DM健康知识的总认知率(96.67%)高于对照组(83.33%),差异有统计学意义(χ2= 5.926,P<0.05)。
干预前,两组DSCS量表、SF-36量表评分对比,差异无统计学意义(P均>0.05);干预8周后,研究组DSCS量表评分(89.65±10.50)分、SF-36量表评分(88.36±6.85)分,均高于对照组的(82.67±8.45)分、(80.64±5.77)分,差异有统计学意义(t=4.012、6.677,P均<0.05)。
研究组护理总满意率较对照组高,差异有统计学意义(P<0.05)。
结论基于看图对话工具的健康教育能够有效提升T2DM患者对于疾病知识的认知程度,改善自我管理行为,保障生活质量,且提高了护理满意度。
[关键词]看图对话工具;健康教育;2型糖尿病[中图分类号]R5 [文献标识码]A [文章编号]1674-0742(2024)02(c)-0144-05Application Effect of Health Education Based on Picture-based Dialogue Tool in Patients with Type 2 Diabetes MellitusXU Ziqing, CHEN Yinfeng, SU XueqingThe First Affiliated Hospital of Xiamen University, Xiamen, Fujian Province, 361000 China[Abstract] Objective To analyze the effect of health education based on picture-based dialogue tool in patients with diabetes mellitus type 2 (T2DM). Methods A total of 120 T2DM patients admitted to the First Affiliated Hospital of Xiamen University from January 2021 to December 2022 were selected randomly as the study object and were divided into two groups using random number table, with 60 cases in each group. The control group received routine health education, and the study group adopted the health education mode based on picture-based dialogue tool. T2DM health knowledge cognition score, T2DM diabete self care scale (DSCS) score, MOS item short from health survey (SF-36) score, and nursing satisfaction were compared between the two groups. Results The total recognition rate of T2DM health knowledge in the study group was 96.67%, which was higher than 83.33% in the control group, the difference was statistically significant (χ2=5.926, P<0.05). Before intervention, there were no statistically significant differences in the scores of DSCS scale and SF-36 scale between two groups (both P>0.05). After 8 weeks of intervention, the DSCS score was (89.65±10.50) points and the SF-36 score was (88.36±6.85) points in the study group, which were higher than (82.67±8.45) points and (80.64±5.77) points in the control group, the differences were statistically signifi⁃[作者简介] 徐子清(1988-),女,本科,主管护师,研究方向为内分泌糖尿病。
211128087_建筑领域的命名实体识别研究

Value Engineering1概述命名实体识别(Named Entity Recognition )是指从非结构化文本中抽取每个命名实体,标注成相对应的类型,在文本中找到提及的实体后,通常需要将实体链接到知识库或知识图谱中的具体实体,这一过程被称作实体链接。
在建筑领域,知识图谱的构建呈不断发展的趋势。
而建筑领域的命名实体识别研究是知识图谱构建的重要基石。
本文对建筑领域NER 的内容、文献、数据集、模型、以及其问题和未来展望进行阐述。
本文在美国土木工程师协会数据库,以“NER ”,“Engineering Management ”,“Named Entity Recognition ”,“construction management ”等为主题词,收集了2014-2022年国外NER 在建筑领域中应用的相关文献[1-13]。
同时在国内常用的数据库,对“命名实体识别”、“建筑”、“工程”等主题词查询同NER 在建筑领域的研究文献[14-42]。
汇总见图1,其中“国外”指搜集的外文文献;“国内1”指搜集的不含硕士论文的中文文献;“国内2”指搜集的含硕士论文的中文文献;2022年的文献截止到2022.4.19日。
图1中可以看出自2014年国内外关于建筑领域NER 的文献开始出现,从2020年开始文献数量呈增加趋势。
因此,在建筑领域NER 的研究工作仍需进一步探索与完善。
对上述文献的题目,通过Python 生成词云图,见图2。
出现的高频词是命名实体识别类的词汇,其次就是construction 、城市、桥梁检测等,说明目前对建筑领域的NER 的研究重点在此,还未涉及更多方面。
2相关工作建筑领域的命名实体识别(Named Entity Recognitionin Architecture-related Fields )是指针对建筑领域相关的文本进行抽取,对其中涉及的每个实体进行标注,这里的建筑领域泛指土木、建筑工程等。
滑窗法目标检测的原理

滑窗法目标检测的原理滑窗法目标检测的原理在计算机视觉领域,目标检测是一个重要的研究方向。
它的目的是在图像或视频中准确地识别出物体的位置和类型。
滑窗法(Sliding Window)是一种经典的目标检测方法,其原理基于对图像的局部区域进行滑动窗口的检测。
滑窗法的基本原理是,在给定的图像上使用固定大小的窗口,以不同的尺度和位置滑动,并利用分类器对每个窗口进行判断,判断该窗口是否包含感兴趣的目标。
在滑动窗口的过程中,分类器可以根据已知的训练数据进行学习,以决策每个窗口是否属于目标类别。
滑窗法的主要步骤如下:1. 定义窗口大小:需要定义用于滑动的窗口的大小。
这个大小通常根据目标的尺寸和检测场景的复杂程度来确定。
较小的窗口可能会错过小目标,而较大的窗口可能会导致计算复杂度增加。
2. 设置滑动步长:为了覆盖整个图像,需要设置合适的滑动步长。
步长越大,滑动窗口的数量就越少,计算速度越快;而步长越小,滑动窗口的数量就越多,计算速度越慢。
选择合适的滑动步长是非常重要的。
3. 图像尺度变换:为了检测不同大小的目标,需要对图像进行尺度变换。
通常情况下,可以通过改变窗口的大小或者对输入图像进行缩放来实现尺度的变换。
通过对不同尺度下的图像进行滑动窗口的检测,可以更好地捕捉不同大小目标的特征。
4. 特征提取:在每个滑动窗口位置上,需要提取一组有效的特征来描述该窗口的内容。
这些特征可以是颜色、纹理、形状等图像特征,也可以是基于深度学习的卷积神经网络提取的特征。
特征的选择和提取对于目标检测的性能起着至关重要的作用。
5. 目标分类:在提取了窗口的特征之后,需要使用训练好的分类器对窗口进行目标类别的判断。
常见的分类器包括SVM(支持向量机)、随机森林(Random Forest)和卷积神经网络等。
分类器的训练数据通常是经过标注的正负样本数据,通过学习这些数据的特征,分类器可以对新的窗口进行准确的分类。
6. 结果输出:根据分类器的判断结果,可以得到每个窗口是否包含感兴趣的目标。
一种巡飞弹机电引信
收稿日期:2020-09-15作者简介:谭勇军(1974-),男,湖南永州人,工程师,学士;主要研究方向:引信系统设计;周文杰(1989-),男,湖南衡阳人,工程师,硕士研究生;主要研究方向:电引信设计;唐碧文(1990-),男,湖南永州人,工程师,硕士研究生;主要研究方向:引信结构设计。
一种巡飞弹机电引信谭勇军,周文杰,唐碧文(湖南兵器技术中心有限公司,湖南长沙410005)摘要:巡飞弹作为近年来全球广泛应用的无人机技术与弹药的有机结合,相关类型的智能弹药必然成为未来军事装备的重要发展趋势,本文针对巡飞弹特点设计了一种适配巡飞弹的引信,介绍了引信的机械结构、传爆序列、安全控制电路及软件流程,引信实际使用效果良好。
关键词:巡飞弹;引信;安全控制系统;保险与解除保险装置中图分类号:TJ430.2文献标识码:AAn Electromechanical Fuze for Cruise MissileTAN Yong-jun,ZHOU Wen-jie,TANG Bi-wen(Hunan ordnance Technology Center CO.,LTD,Changsha 410005,China)Abstract :Cruise missile is an combination of ammunition and UAV technology which is popular all over the world inrecent years.The related intelligent ammunition is bound to become one of the most important development trend of military equipment in the future.According to the characteristics of cruise missile,this paper designs an fuze suitable for cruise missile,and introduces the mechanical structure,detonation sequence,safety control circuit and software flow of the fuze.The actual use effect of the fuze is good.Key words:cruise missile;fuze;safe control system;safety and arming device随着电子技术飞速发展,智能化是未来作战武器必然的发展趋势。
基于改进网格搜索算法的随机森林参数优化

基于改进网格搜索算法的随机森林参数优化温博文;董文瀚;解武杰;马骏【摘要】随机森林是一种有效的集成学习算法,被广泛应用于模式识别中.为了得到更高的预测精度,需要对参数进行优化.提出了一种基于袋外数据估计的分类误差,利用改进的网格搜索算法对随机森林算法中的决策树数量和候选分裂属性数进行参数优化的随机森林算法.仿真结果表明,利用该方法优化得到的参数都能够使随机森林的分类效果得到一定程度的提高.%Random forest is an effective ensemble learning method,which is widely used in pattern recognition.In order to get higher accuracy,it is necessary to optimize the parameter of random forest.Based on generalization error of out-of-bag estimates,this paper proposes a parameter optimization method for a random forest with improved grid search.The parameter of the number of decision trees and candidate splitting attributes is optimized to improve accuracy.The simula-tion results demonstrates that optimized parameter by the method proposed in this paper makes the classification perfor-mance of random forest better.【期刊名称】《计算机工程与应用》【年(卷),期】2018(054)010【总页数】4页(P154-157)【关键词】随机森林;袋外估计;网格搜索;参数优化【作者】温博文;董文瀚;解武杰;马骏【作者单位】空军工程大学航空航天工程学院,西安710038;空军工程大学航空航天工程学院,西安710038;空军工程大学航空航天工程学院,西安710038;空军工程大学航空航天工程学院,西安710038【正文语种】中文【中图分类】TP1811 引言随机森林算法是由Breiman于2001年提出的一种集成学习算法,并在文献[1]用强大数定理证明了其收敛性。
由小到大的作文

由小到大的作文Title: From Small to Big - A Composite EssayIn the vast expanse of the universe, we often find ourselves feeling minuscule and insignificant.However, it is important to remember that even the smallest of entities play a significant role in the grand scheme of things.This concept can be applied to various aspects of life, from the personal to the professional.In this essay, we will explore the significance of starting small and gradually growing, using random sentence structures and varying paragraph styles to emphasize the diversity of the topic.在浩瀚的宇宙中,我们常常感到自己微不足道。
然而,重要的是要记住,即使是最小的实体在事物的总体中也发挥着重要作用。
这个概念可以应用于生活的各个方面,从个人到职业。
在这篇作文中,我们将探讨从小到大逐渐成长的重要性,使用随机的句子结构和变化的段落风格来强调话题的多样性。
When we look at the world around us, we see a countless array of sizes and shapes.From the tiny ant to the colossal galaxy, each entity has its own unique place in the world.The same can be said about human achievements.Great accomplishments often start with small beginnings.A seed, for instance, may seem insignificant, but it has the potential to grow into a massive tree.In the same way, a successful career or a thriving business starts with a single idea or action.当我们观察周围的世界时,我们看到了无数的大小和形状。
图像分类 英语作文
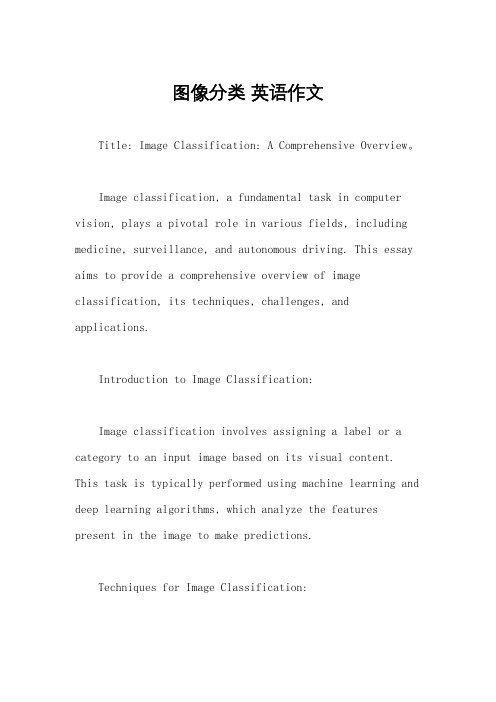
图像分类英语作文Title: Image Classification: A Comprehensive Overview。
Image classification, a fundamental task in computer vision, plays a pivotal role in various fields, including medicine, surveillance, and autonomous driving. This essay aims to provide a comprehensive overview of image classification, its techniques, challenges, and applications.Introduction to Image Classification:Image classification involves assigning a label or a category to an input image based on its visual content. This task is typically performed using machine learning and deep learning algorithms, which analyze the features present in the image to make predictions.Techniques for Image Classification:1. Traditional Machine Learning Algorithms: Before the advent of deep learning, traditional machine learning algorithms such as Support Vector Machines (SVM), k-Nearest Neighbors (k-NN), and Random Forests were commonly used for image classification. These methods relied on handcrafted features extracted from images, such as Histogram of Oriented Gradients (HOG) or Scale-Invariant Feature Transform (SIFT).2. Deep Learning: Deep learning revolutionized image classification by automatically learning hierarchical features from raw data. Convolutional Neural Networks (CNNs) emerged as the cornerstone of deep learning-based image classification. CNNs consist of multiple layers of convolutional, pooling, and fully connected layers,enabling them to learn intricate patterns directly from the pixel values of images.Challenges in Image Classification:1. Data Quality and Quantity: Image classification models require large amounts of labeled data for training.However, obtaining high-quality labeled datasets can be challenging and expensive, particularly for specialized domains.2. Overfitting: Deep learning models are prone to overfitting, wherein they memorize training data rather than learning generalizable features. Techniques such as dropout regularization and data augmentation are employed to mitigate overfitting.3. Class Imbalance: In real-world datasets, classes may not be evenly distributed, leading to class imbalance issues. Addressing class imbalance is crucial to ensurethat the model does not favor dominant classes at the expense of minority classes.4. Adversarial Attacks: Adversarial attacks involve making imperceptible perturbations to input images to deceive the classifier. Robustness against such attacks is essential for deploying image classification models in security-sensitive applications.Applications of Image Classification:1. Medical Imaging: Image classification is widely used in medical diagnosis, including the detection of tumors, lesions, and abnormalities in medical images such as X-rays, MRIs, and CT scans.2. Object Recognition: Image classification forms the basis of object recognition systems used in robotics, surveillance, and augmented reality applications. These systems can identify and classify objects in real-time from camera feeds.3. Remote Sensing: In remote sensing applications,image classification is utilized to analyze satellite and aerial imagery for purposes such as land cover mapping, environmental monitoring, and disaster management.4. Autonomous Vehicles: Image classification enables autonomous vehicles to recognize and interpret traffic signs, pedestrians, vehicles, and other objects in their surroundings, facilitating safe navigation and decision-making.Conclusion:In conclusion, image classification is a fundamental task in computer vision with numerous applications across various domains. While deep learning has significantly advanced the field, challenges such as data quality, overfitting, and class imbalance persist. Addressing these challenges and continuing research efforts will further enhance the accuracy and robustness of image classification systems, unlocking new possibilities for real-world applications.。
软件专业英语词汇

软件专业英语词汇default默认LAN局域网WAN广域网Client/Server客户机/服务器ATM(AynchronouTranferMode)异步传输模式WindowNT微软公司的网络操作系统Internet互联网WWW(WorldWideWeb)万维网protocol协议HTTP超文本传输协议FTP文件传输协议Brower浏览器homepage主页Webpage网页webite网站URL在Internet的WWW服务程序上用于指定信息位置的表示方法Online在线Email电子邮件ICQ网上寻呼Firewall防火墙Gateway网关HTML超文本标识语言hyperte某t超文本hyperlink超级链接IP(Addre)互联网协议(地址)SearchEngine搜索引擎TCP/IP用于网络的一组通讯协议Telnet远程登录IE(InternetE某plorer)探索者(微软公司的网络浏览器) Navigator引航者(网景公司的浏览器)ISO国际标准化组织ANSI美国国家标准协会DVDdigitalberatile数字化通用光盘ITingormationtechnology信息技术PDAperonaldigitalaitant个人数字助理RAMrandomaccememory随机存储器WWWWorldWideWeb万维网DBMSdatabaemanagementytem数据库管理系统HTMLHyperte某tMarkupLanguage超文本标示语言OLEobjectlinkingandembedding对象链接潜入SQLtructuredquerylanguage结构化查询语言URLuniformreouicelocator统一资源定位器AGPacceleratedgraphicport加速图形接口ALUarithmetic-logicunit算术逻辑单元CPUcentralproceingunit中央处理器HPSBhighperformanceerialbu高性能串行总线ISAindutrytandardarchitecture工业标准结构体系PCMCIAPeronalMemoryCardInternationalAociation个人计算机存储卡国际协会RAMrandom-accememory随机存储器ROMread-onlymemory只读存储器USBuniveralerialbu通用串行总线CRTcathode-raytube阴极射线管HDTVhigh-definitionteleviion高清晰度电视LCDliquidcrytaldiplaymonitor液晶显示器MICRmagnetic-inkcharacterrecognition磁墨水字符识别器OCRoptical-characterrecognition光电字符识别器OMRoptical-markrecognition光标阅读器TFTthinfilmtranitormonitor薄膜晶体管显示器其他Zipdik压缩磁盘Domainnameytem(DNS)域名服务器filetranferprotocol(FTP)文件传送协议hyperte某tmarkuplanguage(HTML)超文本链接标识语言Localareanetwork(LAN)局域网internetrelaychat(IRC)互联网多线交谈Metropolitanareanetwork(MAN)城域网Networkoperationytem(NOS)网络操作系统uniformreourcelocator(URL)统一资源定位器Wideareanetwork(WAN)广域网。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
olivier@.au .au/~olivier
Date
June 1, 1998
ห้องสมุดไป่ตู้
ISSN 1326-4524. Copyright c 1998 Olivier de Vel and Stefan Aeberhard. All rights reserved.
as illumination and object re ectance), the reduced number of model and image features in a 2D view compared with a 3D model and, the inherent redundancy of features in adjacent views in the viewing sphere. 2] derives a theoretical upper-bound on the number of views needed in order to achieve zero probability of false negative matches. Experimental results vary greatly. For example, Poggio and Edelman 7] estimate that approximately 80 views may be su cient for a neural network approach. McCane et al 5] suggest 5 to 8 regularly-spaced views per object for uncluttered scenes to achieve generalisation recognition rates of around 80% for mediumsized object model bases. Though view-based recognition is a conceptually simple and robust OR technique, many of the approaches developed to date have been demonstrated on small, simplistic object databases requiring, in many cases, large training and/or recognition times. In this paper we introduce a novel OR technique that is an extension of the view-based object recognition paradigm and that capitalises on the inherent redundancy of both inter- and intra-view features as well as on increased computational e ciency. Furthermore, the technique is robust to object scaling and rotation. We use a set of random line segments of 2D image views as our training data representation and an e cient matching operation that achieve high generalisation recognition rates with signi cantly reduced computational times. The method additionally provides for a signi cant reduction in the requirements for storage of the model data. We describe the basic algorithm in Section 2 and present the experimental results and comparisons with an example-based learning algorithm in Section 3. Finally, we conclude and give future work in Section 4.
JAMES COOK UNIVERSITY
Object Recognition using Random Image-lines
Olivier de Vel and Stefan Aeberhard TR 98/03
DEPARTMENT OF COMPUTER SCIENCE
TOWNSVILLE QUEENSLAND 4811 AUSTRALIA
Title Primary Author(s) Contact Information
Object Recognition using Random Image-lines Olivier de Vel and Stefan Aeberhard Department of Computer Science James Cook University Townsville, QLD 4811 AUSTRALIA
Abstract
1 Introduction
Three-dimensional (3D) object recognition (OR) can be de ned as the ability to automatically recognise one or more objects in isolation or in a complex, cluttered 2D scene. Prior knowledge of the known objects is made available to the 3D object recognition system by developing a 3D model of the object or, by training the system on one or more image views of the scene. The system can then detect and recognise objects in a 2D scene instance by matching the precompiled object models or training data with the scene objects. This task is, however, made di cult because the appearance of objects in an image may vary depending on the viewing direction and illumination conditions. Furthermore, if the image scene contains multiple partially occluding objects, the 3D recognition system has to be able to handle incomplete scene objects. Thus the detection of object boundaries in a cluttered scene can become quite di cult. There exists a multitude of techniques in the OR literature. A popular approach is to use 3D scenes as the input representation source, typically in the form of geometric models such as CAD models (e.g., 4]) or relational or hierarchical graph representations (e.g., 8]). Object features used in the representations include edges, surface and volumetric primitives, normals, corners, etc. Recognition is performed by applying a matching operator (such as graph matching) to determine the best object model for a given scene object. However, 3D model generation can be time consuming and model matching computationally expensive, particularly for large object databases and complex geometrical object models. A more general and extendible approach is view-based recognition in which a set of 2D views of each object is sampled at regular intervals in the viewing sphere and stored in an object-view database. The object recognition task can be undertaken using one of two basic approaches namely, by 2D matching or by example-based learning. In the 2D view matching approach, the example view is matched with one of the stored 2D views, in a similar way to 3D model matching. For example, 2] investigates the relative performance of 3D model-based recognition methods with 2D multi-view methods by matching simple features such as edges and bends in each 2D view; 6] use principle component analysis to construct probability density distributions for object models in intensity images using a maximum likelihood framework for object recognition. In the case of example-based learning, the object recognition system \learns" the input representation in order to perform the recognition task in a similar way that the human visual system recognises objects. For example, 7] describe a neural network that utilises generalised radial basis functions for learning simple wire-frame object models from examples; 5] use the \recognition-by-parts-and-relations" machine learning paradigm which generates descriptions of objects in terms of object parts and relational attribute bounds. View-based recognition simpli es the object model generation and matching phases when compared with 3D object models. For example, surface and volumetric representations and matching are generally more easily handled. This advantage is traded-o against the apparent larger time- and space-complexity requirements of having a large number of 2D views for each object. Surprisingly, however, a large number of views may not always be necessary. This is due to one or more reasons such as, the presence of non-geometric information in images (such 1