微观交通仿真模型系统参数校正研究_以VISSIM的应用为例[1]
微观交通仿真系统参数校正研究_孙剑
引 言1
交通流仿真是再现交通流运行规律,对交通系统进行管 理、控制和优化的重要实验手段和工具。随着智能运输系统 在我国的逐步实施,交通网络微观仿真软件特别是 VISSIM 软件在我国也得到了广泛的应用。微观仿真模型运用大量的 独立参数来描述交通系统运行、交通流特性以及驾驶员行为 等,参数的取值对仿真结果有很大的影响[1]。在仿真系统中, 这些模型参数均有缺省值,同时也允许用户对这些参数进行 修正。缺省值往往是根据模型开发国家的情况确定的,并不 一定适合于我国的实际情况。所以,针对具体的仿真对象, 必须对仿真参数进行标定。
VISSIM 仿真系统模型为实例,建立了仿真模型参数校正 的遗传模拟退火启发式算法,对影响模拟结果的主要因素 进行分析和标定,实现了对 VISSIM 的仿真参数的自动化 校正,最后根据实测结果和仿真实验比较分析,得出了令 人满意的结果。
1 模型参数校正
1.1 模型参数校正概念
所谓模型参数校正即是根据实地的交通运行状况,对仿 真系统中各个独立的参数进行调整以使模型能够准确表达 具体仿真对象的过程。交通仿真系统模型的参数校正实质上 是在设定目标函数后的组合优化问题。对于每一个目标函数 有两类输入,一类输入是实地观察(检测)的数据,如:速度、 行程时间、流量等;另一类是模拟模型输出的对应数据。需 要校正的仿真参数一般包括交通控制运行参数、交通流特性 以及驾驶员行为特性等。参数校正的目的是使仿真输出结果 与实际测量的数据差异最小。
②接着需进行校正参数指标选择,我们把模拟输入参数 分为可控参数和不可控参数,不可控参数一般不随模型的变 化而变化,例如:道路条件、交通量、信号配时等,可控参 数一般是模型中值可以改变的参数,例如:车道变换距离、 最小车头时距、车辆消失前的等待时间等。校核参数必须是 容易实际测量得到以及在仿真中可控。
基于VISSIM的微观交通仿真模型建模审核流程研究
基于 VISSIM 的微观交通仿真模型建模审核流程研究【摘要】解决交通拥堵的一个方法就是科学地应用交通模型,对城市的发展和交通出行需求等方面进行建模,并对交通政策、法规、工程方案和管理措施的效果进行科学分析和对比。
本文旨在建立一套完善的模型审查流程,通过仿真建模流程优化,规范交通建模技术流程,以便科学的支撑交通规划和管理工作。
本文以微观交通流仿真软件 Vissim 为例,建立该软件应用的交通流模型建模审查流程,具有一定的借鉴意义。
【关键词】VISSIM;交通仿真;微观模型随着中国近三十年高速的经济增长和人民生活水平的提高,交通拥堵已成为全国各城市面对的难题。
全国每年因交通不畅,运输效率低下和成本增长等因素造成的经济损失高达数百亿元。
解决交通拥堵的一个方法就是科学地应用交通模型,对城市的发展和交通出行需求等方面进行建模,并对交通政策、法规、工程方案和管理措施的效果进行科学分析和对比。
近年随着计算机性能的提高和仿真技术的发展,微观交通仿真软件能够精确描述交通流中的车辆/驾驶员的行为,从而使在计算机中对复杂的城市交通情况进行真实模拟得以实现。
城市交通流仿真模型需要很多参数来对交通流进行详细地描述,交通流仿真模型的输入参数的正确性对于模型仿真结果的精度有很大的影响,不通过复杂的工作来校正这些输入参数,模型可能会产生不真实的结果。
本文旨在建立一套完善的模型审查流程,通过仿真建模流程优化,规范化交通建模技术流程,以便科学的支撑交通规划和管理工作。
1、微观交通流仿真模型根据仿真模型描述程度的不同,交通仿真可分为宏观仿真、中微观仿真、微观仿真。
微观交通仿真描述系统的个体特性,并通过真实反映系统的所有个体特性来反映系统的总体特性。
本文以德国微观交通流仿真软件 Vissim 为例,建立该软件的交通仿真模型建模审查技术流程,以便对建设项目的交通影响分析进行审核。
2、模型审查流程再造随着我国交通影响分析制度的立法,交通模型在定量分析方面的作用越发突显,合理利用交通模型工具,发挥其在交通分析过程中的作用越来越受到业界重视。
VISSIM仿真软件中微观交通仿真模型参数校正研究
工程技术科技创新导报 Science and Technology Innovation Herald5DOI:10.16660/ki.1674-098X.2018.22.005VISSIM仿真软件中微观交通仿真模型参数校正研究①陈梅艳(云南开放大学机电工程学院 云南昆明 650223)摘 要:微观交通仿真模型具有较强的直观性和便捷性,且风险性较低,经济效益良好,在交通工程领域得到了日渐广泛的应用。
微观交通仿真模型需大量借助独立参数对交通系统实际运行状况、交通流呈现出的特性以及驾驶员的具体行为等进行描述,参数取值会严重影响仿真结果。
因此,必须加强对微观交通仿真模型的参数校正。
本文简述了VISSIM仿真软件的含义,浅析了微观交通仿真模型参数校正的概念和流程,探究了微观交通仿真模型校正参数选取与算法选择,以期为相关研究提供借鉴。
关键词:VISSIM仿真软件 微观交通仿真模型 参数校正中图分类号:U491.1 文献标识码:A 文章编号:1674-098X(2018)08(a)-0005-02①基金项目:云南省科技计划项目青年项目,基于vissim的交通安全仿真系统研究(项目编号:2017FD131)。
作者简介:陈梅艳(1986—),女,汉族,湖南衡阳人,硕士,讲师,研究方向:交通运输工程。
微观交通仿真模型,将秒或者分秒设定为时间刻度,对单个车辆相应的运行规则进行模拟,并对城市道路或者行人系统之间的相互作用进行科学评估,进而实现对道路网交通流状况的详细描述和客观评价。
相对于传统的数学模型,微观交通仿真模型具有显著的优越性。
对微观交通仿真模型实施科学有效的参数校正,能有效保障输出结果的有效性和质量。
其中,关键要选取模型校正的具体参数和适宜算法。
1 VISSIM仿真软件概述VISSIM仿真软件是基于行为驱动的多用途软件,能实现对交通流状况的科学分析和客观评价,在城市道路交通以及综合运输等各类系统分析中得到了广泛应用。
VISSIM驾驶行为参数和模型校正

VISSIM 驾驶行为参数调整和模型校正
居菲
上海,2013-3
VISSIM中的驾驶行为模型
生理—心理跟车模型
生理—心理跟车模型
VISSIM中的停车时平均间距已经默认附加了
±的变化幅度,因此
可由实测停车间距标定。
生理—心理跟车模型
CC7、CC8、CC9不超过加速度定义中的范围
生理—心理跟车模型Psycho-physical car following model
前视最大值:少数情况要加大,比如铁路信号建模后视最大值:路网复杂情况下减小可提高仿真速度30 30
生理—心理跟车模型
后车驾驶员在一段时间内除急刹车外不对前车行为作出反应
车道变换
车道变换
车道变换
车道变换
车辆换道时慢车道上的车辆协调刹车的最
车道变换
在减速区域超车:不选:车辆在减速区上
横向行为
观察相邻车道上车辆的位置调整横向空间
横向行为
>超车时考虑下一个转向方向
横向行为
超车时相邻车道车辆间的最小横向距离
信号控制
信号控制
调整饱和流率
调整饱和流率
99 Car Following Model
居菲
上海,2013-3。
VISSIM实验案例

VISSIM实验案例近年来,交通拥堵问题越来越严重,给人们的出行带来了很大的困扰。
为了解决这一问题,研究人员和交通管理部门积极探索各种交通管理手段和策略。
VISSIM(Verkehr In Städten-SIMulationsmodell,即城市交通模拟模型)作为一种交通仿真软件,被广泛应用于交通规划研究和交通管理实践中。
为了验证VISSIM在交通规划和控制中的应用效果,以下介绍一个VISSIM实验案例。
该案例以市道路网络为研究对象,旨在通过VISSIM模拟分析交通流量的分布和交通信号灯的优化配置,以减少道路拥堵程度。
具体步骤如下:第二步,设置交通流模型。
根据实际情况,设置进出口道路上的交通流量和类型(车辆、公交车、行人等),以及交通流的起始时间和持续时间。
可以设置不同路段的车辆转向规则,以模拟真实的交通行为。
第三步,配置交通信号灯。
通过VISSIM软件的信号控制功能,设置各个路口的交通信号灯的控制策略。
可以根据实际情况设置信号灯的时长、配时模式等参数。
第四步,运行仿真模拟。
在保证模拟参数的准确性的前提下,运行VISSIM模型,并观察模拟结果。
模拟结果包括交通流量的分布、道路拥堵程度、车辆行驶速度等指标。
第五步,优化信号灯配置。
通过观察模拟结果和分析数据,对比不同信号灯配置方案的效果。
通过试错和调整信号灯的控制策略,找出最佳的信号灯配时方案。
第六步,模拟验证。
根据最佳信号灯配时方案,再次运行VISSIM模型,观察模拟结果是否满足预期效果。
如果实际结果符合预期,则可将此方案用于实际交通信号灯的优化配置。
通过以上实验案例,可以得出以下几个结论:首先,VISSIM模拟可以准确地反映出道路网络中交通流的分布和交通拥堵的程度。
通过观察模拟结果,可以直观地了解到道路网络中哪些路段的交通流量较大,哪些路段容易出现拥堵。
其次,通过调整信号灯的控制策略,可以有效地减少道路的拥堵程度。
根据模拟结果,可以找出最佳的信号灯配时方案,从而提高道路的通行能力。
基于VISSIM的微观交通仿真模型参数标定研究
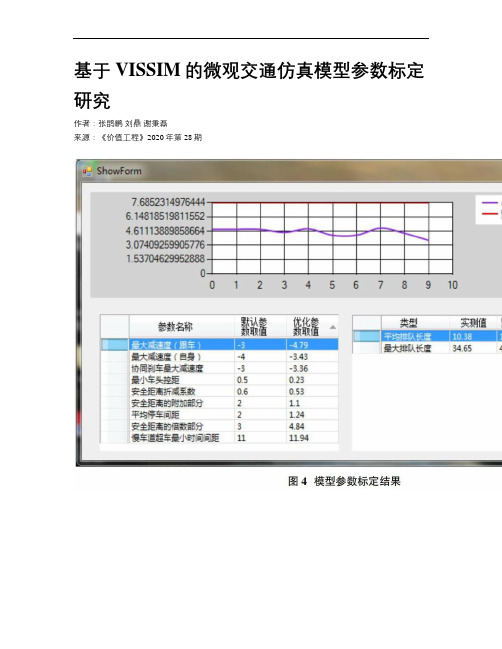
基于VISSIM的微观交通仿真模型参数标定研究作者:张鹍鹏刘鼎谢秉磊来源:《价值工程》2020年第28期摘要:在仿真软件进行交通仿真之前,必需进行模型参数的标定,以提升交通模型的适用性和交通仿真的准确性。
目前国内应用的主流交通仿真软件大多依托于国外交通特性开发,不能充分适用于我国实际交通运行特征。
在已有研究的基础上,本文借助VISSIM COM接口,以排队长度、最大排队长度、旅行时间、出行延误为评价指标,借助遗传算法的智能寻优功能,利用C#语言开发了模型参数标定工具,实现了29种模型参数的自由组合以及自动化和便捷化标定,并且用深圳市实际案例验证了模型算法的有效性。
本研究提供了一套通用性强、操作便捷的模型标定方法,可为实际模型标定工作提供支持。
Abstract: It is necessary to calibrate parameters to improve the applicability of traffic models and accuracy of traffic simulation before conduction of the traffic simulation. At present, most of traffic simulation software applied in China is mostly developed by the foreign traffic characteristics, but it cannot adapt to the actual traffic operation characteristics of China. On the basis of the existing researches, with the help of VISSIM COM interface, this paper takes the queuing length, maximum queuing length, travel time and travel delay as the evaluation indexes,and uses the intelligent optimization function of genetic algorithm. Then the calibration tool of modelparameters is developed by using C# language, which realizes the automatic and convenient calibration of 29 model parameters. The model algorithm is verified by the actual case in Shenzhen. This study provides a set of universal and convenient calibration method for driving behavior model,which can provide support for the actual model calibration work.關键词:交通仿真;VISSIM;参数标定;遗传算法;标定工具Key words: traffic simulation;VISSIM;parameter calibration;genetic algorithm;calibration tool中图分类号:U491;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;; 文献标识码:A;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;; 文章编号:1006-4311(2020)28-0189-050; 引言在实际重大工程建设、片区交通改善、重点活动交通组织等项目中,常利用Vissim、Tansmodeler、PARAMICS等微观交通仿真软件进行方案评估,旨在对方案实施前后的效果、交通影响进行量化分析,辅助比选设计方案,以提升决策的科学性。
微观交通仿真模型

2交通仿真模型分类
根据交通仿真模型对交通系统描述的细节程度不同,可将交通仿真模型划分
为宏观、中观(又称准微观)、微观3 种。
微观交通仿真模型:由于微观交通仿真模型既融合了宏观和中观模型的某 些方面,又非常细致地描述了交通系统的交通环境及车辆实体等构成要素,因而 它对交通系统的要素及行为等的细节描述程度是3 种模型中最高的。它是以单个 车辆为对象,通过一些相对简单但真实的仿真模型来模拟车辆在不同道路和交通 条件下的路网上运行,并以动态图像的形式显示出来,在描述和评价路网交通流 状况方面具有传统数学模型所无法比拟的优越性。例如,微观模型对交通流的描 述是以单个车辆为基本单元的,车辆在道路上的跟车、超车及车道变换行为等微 观行为都能够非常细致和真实的反映出来。微观模型的重要参数是每辆车的当前 速度和位置。
国内
与国外相比,由于我国交通 国情的限制,长期以来交通 仿真并未引起有关部门的重 视,随着ITS 在世界各国研究 的广泛开展,我国交通界认 识到了在我国开展ITS 研究的 重要性。与此同时,作为ITS 核心技术之一的交通仿真也 受到了极大的关注
思路及流程安排
学习com 手册 复习VB语 言 调查道 路状况 学习 VISSIM、 V3DM、 3DMAX 搜集车辆, 行人数据 V3DM、 3DMA X设计 车辆 模型
感谢学校领导对大赛的支持,专家评 委的耐心观看和评审。
搜集交 通事故 资料
VISSI M设 计路 面
VB编 程调 用控 制车 辆
制作 视频、 说明 书等
学习准备阶段
搜集资料阶段
设计调试阶段
结束阶段
VISSIM简介
VISSIM 是德国PTV 公司的产品,它是一个离散的、随机的、以10-1s 为时间步长的微观模型。车辆的纵向运动采用了基于规则的算法。不同驾 驶员行为的模拟分为保守型和冒险型。VISSIM 提供了图形化的界面,用2D 和3D 动画向用户直观显示车辆运动,运用动态交通分配进行路径选择。 VISSIM 能够模拟许多城市内和非城市内的交通状况,特别适合模拟各种城
Vissim仿真软件模型参数标定与应用
V issim 仿真系统对路段交通流模拟时,主要考 虑车辆、道路、驾驶行为、环境、交通管制措施等影 响因素[1],使用者可根据需要自行变动模型参数。在 实际应用中发现许多使用者通常采用系统默认的参 数值,并未根据实际需要作出修订。对于车辆尺寸、 道路宽度等物化设备及设施的基本参数,国内外差 异不甚明显,并且此类参数的调整使用者也容易判 别;但对于涉及驾驶人行为的部分参数,因国内外 驾驶习惯及行驶规则差异等影响,参数的不同对仿 真结果的影响相当显著。实验中发现,采用影响驾 驶行为的不同参数的仿真结果与系统默认值对比, 单车道车辆单位时间内车辆通过数、车道占有率、 车流密度等相差可达35% ~45%。
Abstr act:Traffic simulation technique provides a critical tool for traffic engineering studies. Although the software features vary across different simulation packages, the fundamental simulation mechanism of those packages remains the same. Taking Vissim, a well-known traffic simulation software tool, as an example, this paper briefly in- troduces the basic structure of the simulation system, and analyzes the parameters related to link traffic simulation. An emphasis was placed on analyzing vehicle-following model related parameters that signifi- cantly influence the simulation results of different scenarios. A com- parison of standard parameter values with the simulation results leads to a relatively reasonable range of parameter values under normal con- ditions. Finally, based on a simulation scenario for a two-lane street segment, the importance of adjusting the experimental parameters was validated through variations of traffic characteristics resulted from dif- ferent parameter values used in the simulation.
VISSIM交通仿真软件模型的构建
VISSIM交通仿真软件模型的构建VISSIM是全球最为流行的交通仿真软件之一,它可以提供准确的交通流量数据和路况参数,以帮助交通规划和路网设计。
VISSIM的模型构建需要按照一定的规则和步骤进行,本文将介绍VISSIM交通仿真软件模型的构建。
1.地图导入在VISSIM中,我们需要首先导入路网地图,VISSIM支持多种地图格式,如Shapefile、OpenDRIVE、AutoCAD等,可以根据具体情况选择。
通过点击VISSIM工具栏上的“File”按钮,选择“New”或“Open”选项,打开导入地图的对话框,选择地图文件并导入即可。
2.建立路段建立路段是VISSIM模型构建的关键步骤之一,它是模拟车辆运行的物理空间。
在VISSIM中,路段分为直线段和曲线段两种类型,可以根据实际情况选择。
通过点击VISSIM 工具栏上的“Network”按钮,选择“Link”选项,打开“Create/Edit Links”对话框,选择想要建立的路段类型并设置相关参数,如长度、宽度、车道数目等。
3.设置车道4.添加交叉口在VISSIM模型中,交叉口是路网中的重要节点,需要进行特殊处理。
通过点击VISSIM工具栏上的“Network”按钮,选择“Node”选项,打开“Create/Edit Nodes”对话框,即可添加交叉口。
添加交叉口后,需要设置交叉口的相关参数,如交叉口类型、路口半径、车道数目、交通灯等。
通过点击鼠标左键绘制交叉口进口,然后通过右键菜单设置出口即可。
在VISSIM模型中,车辆是模拟车流的基本单元。
通过点击VISSIM工具栏上的“Vehicle”按钮,选择“Create/Edit Vehicles”选项,打开“Vehicle Type”对话框,设置车辆的基本参数,如车辆长度、宽度、速度等。
设置完毕后,通过点击鼠标左键绘制车辆即可。
6.设置路网控制VISSIM可以进行多种路网控制,如交通灯、速度限制、车道限制等。
基于VISSIM的实时数据交通仿真技术的应用研究

基于VISSIM的实时数据交通仿真技术的应用探究摘要:随着城市交通的不息进步和车辆数量的快速增长,交通拥堵问题日益突出。
为了解决这一问题,探究人员提出了各种各样的交通仿真技术。
VISSIM作为一种常见的交通仿真软件,在实时数据交通仿真领域发挥着重要的作用。
本文主要探究了基于VISSIM的实时数据交通仿真技术及其在交通领域的应用。
一、引言随着城市化进程的推行,交通拥堵问题日益严峻。
传统的基于实地观测数据的探究方法已经难以满足复杂的城市交通条件下的需求。
因此,交通仿真技术应运而生。
交通仿真技术可以模拟和分析不同道路拓扑结构和交通流量对交通运行状态的影响,为交通管理和规划提供科学决策依据。
二、VISSIM交通仿真技术简介VISSIM是一种基于微观交通仿真原理的软件,它可以模拟和评估道路交通系统的性能。
该软件具有高度的灵活性和可扩展性,能够模拟不同类型道路上的车辆行为。
VISSIM通过引入路网、车辆和引导方式等角色来模拟真实的交通流淌,通过模拟分析,可以评估不同交通网络中交通拥堵状况,并猜测交通拥堵发生的可能性。
三、基于VISSIM的实时数据交通仿真技术探究VISSIM可以通过多种方式得到实时交通数据,并将其应用于仿真模型中。
其中一种常用的方法是使用实时交通数据源,将真实数据输入到VISSIM中。
通过这种方式,可以准确地模拟不同时间段的交通流淌状况,为交通规划和管理提供重要的数据支持。
此外,VISSIM还可以通过与交通控制系统的毗连,实时得到交通信号灯的状态,并将其应用于仿真模型中。
通过这种方式,可以模拟不同交通信号配时方案对交通流的影响,为信号优化提供决策依据。
四、基于VISSIM的实时数据交通仿真技术应用案例分析以某城市为例,通过使用实时交通数据源和交通信号灯状态,我们建立了一套基于VISSIM的实时数据交通仿真模型。
通过对模型的运行和分析,我们发现交通压力较大的区域和道路段,并提出了相应的交通管理和规划措施,以缓解交通拥堵问题。
VISSIM交通仿真软件模型的构建
VISSIM交通仿真软件模型的构建1. 引言1.1 介绍VISSIM交通仿真软件VISSIM是一款被广泛应用于交通规划和仿真研究的软件工具。
它能够帮助交通工程师们模拟不同交通场景下的车辆流动,研究交通信号灯的优化策略,评估路口的交通容量等等。
通过VISSIM软件,用户可以模拟现实交通流量,观察交通系统的运行情况,并且可以通过调整模拟参数来优化交通系统的设计。
在研究交通仿真中,VISSIM软件具有灵活性和精确性。
它能够模拟不同类型车辆的行驶行为,包括不同速度、加速度和驾驶行为。
用户可以根据需要对路口、道路、车道等基础设施进行图形化建模,以模拟真实道路情况。
通过VISSIM软件,研究人员可以更好地理解交通系统的运行规律,为优化交通规划和管理提供科学依据。
VISSIM软件作为交通仿真软件,具有强大的功能和广泛的应用领域。
通过对VISSIM软件的深入了解和使用,研究人员可以更好地进行交通规划和仿真研究,为实际交通系统的优化和改进提供重要支持。
1.2 研究背景研究背景是指在进行VISSIM交通仿真软件模型构建之前,需要先了解相关的背景知识和研究现状。
交通仿真软件在交通规划、交通管理和交通设计领域扮演着重要的角色,能够模拟交通系统的运行情况,帮助分析交通流量、交通拥堵、交通安全等问题。
随着城市化进程的加快和交通需求的增加,交通仿真软件的应用越来越广泛。
在进行VISSIM交通仿真软件模型构建时,研究背景的深入了解可以帮助我们更好地把握模型的建设方向和目标。
需要了解当前交通系统面临的挑战和问题,比如交通拥堵、交通事故等;需要了解已有的交通仿真研究成果和方法,以便借鉴和参考;还需要掌握VISSIM软件的基本原理和操作方法,以确保模型构建的准确性和有效性。
研究背景是VISSIM交通仿真软件模型构建的重要组成部分,只有充分了解背景知识和研究现状,才能够更加准确地开展模型构建工作,为交通系统的运行和管理提供有效的支持和帮助。
基于VISSIM下微观交通仿真模型参数校正分析

基于VISSIM下微观交通仿真模型参数校正分析作者:胡艳樊亚云张晓卫来源:《现代信息科技》2019年第07期摘; 要:如何对微观交通仿真模型参数进行校正和选择合适的校正算法,决定仿真结果质量。
本文重点分析微观交通仿真模型、校正指标选取和模型校正算法,详细分析了跟驰模型和换道模型的重要参数,具体阐述了如何选取校正评价指标和待校正参数,从而保证校正后仿真模型的精度和仿真结构的可性。
关键词:VISSIM;仿真模型;参数校正;微观仿真中图分类号:U491.123; ; ; 文献标识码:A 文章编号:2096-4706(2019)07-0005-03Abstract:How to correct the parameters of microscopic traffic simulation model and select the appropriate correction algorithm determines the quality of simulation results. This paper focuses on the analysis of microscopic traffic simulation model,correction index selection and model correction algorithm,and analyzes the important parameters of the car-following model and the lane-changing model in detail,and how to select the calibration evaluation index and the parameters to be calibrated is expounded in detail,so as to ensure the accuracy of the calibrated simulation model and the reliability of the simulation structure.Keywords:VISSIM;simulation model;parameter correction;microscopic simulation0; 引; 言微觀交通仿真软件是评估交通解决方案的有力工具,仿真模型的参数会影响仿真结果,用户通过实际交通情况对模型参数进行修正,使得描述交通系统运行、交通流特性以及驾驶员行为等更加真实和有效。
《2024年基于VISSIM的实时数据交通仿真技术的应用研究》范文

《基于VISSIM的实时数据交通仿真技术的应用研究》篇一一、引言随着城市化进程的加快,交通问题日益凸显,如何有效解决交通拥堵、提高交通效率成为了社会关注的焦点。
交通仿真技术作为一种有效的手段,在交通规划、设计和管理中发挥着越来越重要的作用。
VISSIM作为一种先进的交通仿真软件,其基于实时数据的仿真技术为交通研究提供了新的思路和方法。
本文将就基于VISSIM的实时数据交通仿真技术的应用进行研究和分析。
二、VISSIM软件及其在交通仿真中的应用VISSIM是一款功能强大的交通仿真软件,其核心在于通过构建虚拟交通环境,模拟真实交通情况,为交通规划和设计提供依据。
在交通仿真中,VISSIM可以模拟各种交通场景,包括道路、车辆、行人、信号灯等,通过设置不同的参数和规则,模拟出各种交通状况。
此外,VISSIM还支持实时数据导入,可以根据实际交通数据进行仿真,使仿真结果更加接近真实情况。
三、实时数据在VISSIM中的应用实时数据在VISSIM中的应用主要体现在数据导入、模型校正和仿真结果分析等方面。
首先,通过导入实时交通数据,可以更加真实地反映交通状况,使仿真结果更加准确。
其次,利用实时数据对模型进行校正,可以保证模型的有效性。
最后,通过对仿真结果进行分析,可以得出各种交通规划和设计方案的优劣,为实际交通管理和规划提供依据。
四、实时数据交通仿真技术的应用研究基于VISSIM的实时数据交通仿真技术在实际应用中具有广泛的应用前景。
首先,在交通规划和设计中,可以通过仿真技术预测交通状况,为城市规划和道路设计提供依据。
其次,在交通管理中,可以通过实时数据仿真技术对交通流量进行监控和预测,及时发现交通拥堵和事故,采取相应的措施进行疏导和处置。
此外,在智能交通系统中,实时数据交通仿真技术也可以发挥重要作用,通过模拟不同场景下的交通状况,为智能交通系统的设计和优化提供依据。
五、案例分析以某城市为例,该城市存在严重的交通拥堵问题。
微观交通模型与仿真系统的构建与应用研究
微观交通模型与仿真系统的构建与应用研究交通拥堵一直以来都是城市发展的难题之一,如何有效地管理和控制交通流量,提高交通效率,减少交通事故,在城市交通管理中显得尤为重要。
而微观交通模型与仿真系统的构建与应用研究成为解决这一问题的关键技术之一。
本文将探讨微观交通模型的构建和仿真系统的应用,并分析其在交通管理中的作用和意义。
微观交通模型是对交通系统中的每个交通参与者的个体行为进行建模的方法。
它能够提供详细而准确的交通流动信息,从而使交通管理者能够更好地了解交通系统的运行机制和性能,并利用这些信息制定出针对性的交通管理策略。
微观交通模型的构建包含了道路网络模型、车辆行为模型和交通流模型三个方面。
道路网络模型是交通系统的基本框架,它采用图论的方法对城市道路网络进行建模,包括道路的形状、长度、连接关系等信息。
在构建道路网络模型时,需要考虑道路的交通容量、行车速度、车道数等参数,以便更真实地模拟交通流动。
通过实时监测和收集道路信息,结合地理信息系统技术,可以动态地更新道路网络模型,从而提高模型的准确性和可靠性。
车辆行为模型是研究车辆运动和车辆驾驶员行为的模型。
它基于车辆的动力学特征、广义速度模型和车辆与车辆之间的相互作用来描述车辆的运动规律。
通过分析车辆行为模型,可以揭示交通流的产生和传播机制,从而通过优化交通信号配时、限制交通拥堵路段的通行能力等手段,提高交通网络的运行效率。
交通流模型是描述交通流动规律的模型。
交通流是指在一定时间内通过道路某一横截面的车辆流量。
交通流模型主要包括流量-密度关系模型和流量-速度关系模型。
通过对交通流模型的研究,可以了解交通流的分布特性、拥堵状况和容量等,并据此提出交通管理的建议和措施。
基于微观交通模型的仿真系统是对交通系统进行实时模拟和仿真的工具。
通过仿真可以模拟不同交通管理策略的实施效果,评估交通系统的运行状况,并为交通管理者提供决策支持。
仿真系统可以根据需要对交通系统的不同部分进行模拟,例如车辆行驶路线的选择、交通信号的配时、交通拥堵状况的变化等。
VISSIM微观交通仿真模型校正研究的开题报告

VISSIM微观交通仿真模型校正研究的开题报告一、研究背景和研究意义随着城市交通拥堵问题的不断加剧,交通仿真技术被广泛应用于交通管理和规划中,VISSIM作为目前最为常用的交通仿真软件之一,受到了广泛的关注和应用。
但是,VISSIM模型的准确性受到了很多因素的影响,比如车流率、车速分布、车头时距等参数。
因此,VISSIM模型校正研究具有重要的应用价值和理论意义。
本研究旨在对VISSIM微观交通仿真模型进行校正研究,进一步提高VISSIM模型的准确性和可靠性,为城市交通管理和规划提供科学依据。
二、研究内容和方法本研究将从以下几个方面对VISSIM模型进行校正研究:1.车流率校正车流率是VISSIM模型中的一个重要参数,它的准确性直接影响模型的仿真效果。
本研究将通过收集实际交通数据,结合VISSIM模拟,对车流率参数进行校正。
2.车速分布校正车速分布是VISSIM模型中另一个重要参数,也影响模型的准确性。
本研究将通过观察实际交通流中车速的变化规律,对VISSIM中的车速分布参数进行校正。
3.车头时距校正车头时距是VISSIM模型中的另一个重要参数,它的准确性直接影响模型的仿真效果。
本研究将通过对实际交通流中车辆之间的距离和速度变化规律进行观察,对VISSIM中的车头时距参数进行校正。
本研究将采用实验研究和文献资料分析相结合的方法,通过对实际交通数据的收集和分析,结合VISSIM模拟,对VISSIM模型进行校正研究。
三、预期成果和意义本研究通过对VISSIM模型的校正研究,将提高VISSIM模型的准确性和可靠性,为城市交通管理和规划提供科学依据。
同时,本研究将对交通仿真领域的进一步研究具有一定的参考价值和推动作用。
四、研究计划和进度安排本研究计划包括以下几个阶段:第一阶段:文献资料调查和分析(1个月)第二阶段:数据收集和分析(2个月)第三阶段:VISSIM模拟和校正(3个月)第四阶段:结果分析和论文撰写(2个月)因此,本研究计划总共耗时8个月。
交通仿真软件模型参数标定研究

交通仿真软件模型参数标定研究摘要:近年来,交通仿真软件在交通工程与交通规划领域应用得越来越广泛,但国内目前使用的仿真软件有相当一部分是从国外引进的,其系统开发背景较大程度上基于国外的交通特性,相关参数的设置都是针对当地的交通状况。
因此在实际应用时,需要结合国内的实际情况对系统参数重新标定和校核。
关键词:TransCAD;VISSIM;参数标定Abstract: in recent years, traffic simulation software in traffic engineering and traffic planning application field to be more and more widely, but domestic current use of simulation software has quite part of it was introduced from abroad, the system development background great degree of based on foreign transportation characteristics, related parameters Settings are all aimed at the local traffic condition. So in practical application, combined with the practical situation of the domestic needs of system parameters calibration and check again.Key words: TransCAD; VISSIM; Parameter calibration0引言交通仿真是指用仿真技术来研究交通行为,它是一门对交通流随时间和空间的变化进行跟踪描述的技术。
微观交通仿真模型参数校正方法适用性研究

微观交通仿真模型参数校正方法适用性研究摘要:为了使微观交通仿真模型更适用于我国道路状况,必须要进行相关参数的校正工作。
目前已经有许多学者对诸多相关方法进行研究以及改进,并取得了不错的成果。
本文介绍了近年来提出的一些微观交通仿真模型参数校正的算法以及适用性,最后分析了对于参数校正的研究方向、存在问题及发展展望。
关键词:VISSIM交通仿真;参数校正;适用性微观交通仿真系统是智能交通系统的一大分支,微观交通仿真能够再现城市道路交通状况,对之后的交通评价、交通控制方案设计和交通管控有重要意义。
交通仿真的关键步骤是建立仿真模型,一般情况下,采用默认参数设置下的交通模型运行结果与实际道路情况相差较大,无法代表所仿真的实际道路交通条件,为使模型最大程度的反映实际道路运行状况,就需要对所建立的模型进行参数校正。
近年来许多学者提出了诸多模型参数校正的算法及其相应的改进算法,比如遗传算法、人工萤火虫算法、粒子群优化算法等。
1、遗传算法及其改进1.1遗传算法遗传算法是模拟自然界生物优胜劣汰过程的具有自适应能力的全局性最优解搜索算法。
它从一个潜在可能解集开始,首先将该解集中一个种群进行二进制编码,即表现为遗传基因的形式,每个编码对应一个问题的解,通常称之为染色体。
在生成初始种群后,按照适者生存的原则,不停迭代生成新的更优秀的个体,直至满足解的要求为止。
遗传算法在迭代过程中,经过遗传算子来决定后代,遗传算法主要的三个算子是:选择算子、变异算子和交叉算子[1]。
1.2遗传算法及其改进算法的应用近年来微观交通仿真模型参数校正运用最多的算法就是遗传算法,它们分别应用于对不同种类道路,不同参数进行校正。
比如:李志明[2]等人早在2006年采用遗传算法对VISSIM仿真软件的Wiedemann 74城市道路模型的7项参数进行校正,并结合实例验证所提出的遗传算法校正研究中的7项参数有良好的适用性。
后期又有学者将遗传算法用于快速路模型的参数校正,例如:胡婷[3]以VISSIM微观仿真模型为基础,运用遗传算法校正了期望速度分布和8个快速路交织区驾驶员行为参数,结合实例验证了所提出的面向快速路交织区的遗传算法参数校正方法的可行性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3
微观交通仿真模型系统参数校正研究 以 V ISSIM 的应用为例*
孙 剑 杨晓光
( 同济大学 上海 200092)
摘 要 微观交通仿 真模型在交通 系统管理 、控 制和优 化中得到 广泛应 用, 然而 大多数 仿
真模型参数均是针对外国的交通情况确定的, 并不一 定适合中国国情。 文章提出了 微观仿真 模型 参数校正流程, 以上海市北京东路 VISSIM 仿真为 实例, 根 据实际采 集的数据, 运用拉丁 方格法 进 行实验设计, 对 V ISSIM 的仿真参数进行了校正, 指出了微观仿真模型参数校正有待改进的方面。
图 1 仿真模型参数校正流程
1) 确定仿真模型参数校正的目标。一般而 言, 目标是使仿真输出结果与实际测量的校核数 据差异最小或为零。
2) 进行校核参数指标选择。模拟输入参数 可分为可控参数和不可控参数, 不可控参数一般 不随模型的变化而变化, 例如: 道路条件、交通量、 信号配时等; 可控参数一般是模型中值可以改变 的参数, 例如: 车道变换距离、最小车头时距、车辆 消失前的等待时间等。校核参数必须是容易实际 测量得到以及在仿真中可控。
4
交通与计算机 2004 年第 3 期 第 22 卷( 总第 118 期)
( 4) 建立评价标准; ( 5) 仿真网络表示; ( 6) 驾驶员路径行为; ( 7) 模型输出结果评价。 上述步骤提供了宏观的参数校正指导原则, 但没有具体的有针对性的仿真参数校正流程。 在本研究中, 针对 Hellinga 的校正过程的宏 观性特点, 笔者提出的参数校正流程更加详细, 在 应用上更具操作性。主要步骤如图 1 所示。
2) 在本次应用中, 校核指标采用路段行程时
微观交通仿真模型系统参数校正研究 以 VISSIM 的应用 为例 孙剑 杨晓光
5
间, 这主要基于两方面的考虑: 一方面, 行程时间 容易通过多次跟车调查获得; 另一方面 VISSIM 仿真输出文件, 也可以输出路段行程时间。
3) 根据 VISSIM 的仿 真需要, 2003 年 5 月 15 日对北京 东路进行 了交通 调查, 包括交 通流 量、交通流向、道路条件、交通组成、行程速度、行 程时间等。信号配时从上海市交巡警总队获得。
4) 对待校正参数的识别和定义是本仿真应 用的关键。在 V ISSIM 中, 涉及到的可控参数主 要有紧急停 车距离、车道变换距离、最小车头时 距、平均停车距离、等待换道消失时间以及观察前 方车辆数, 各参数含义如下。
( 1) 紧急停车距离。紧急停车距离定义为一 个被动型的换道车辆的最后可能位置, 即对于必 须换道的车辆( 被动型车辆换道) , 由于流量太大, 而无法完成换道, 车辆将在此等待机会换道。由 于仿真对象北京东路是一条主干道, 车辆转弯概 率较小, 根据我们的仿真经验, 紧急停车距离对仿 真结果影响不大, 故此参数取固定值 5 m 。
全面实验, 共需 16 次, 然 后根据 4 4 的拉丁方 格, 对安排因素: 等待换道时间、观察前方车辆数 做正交试验。参数分级如表 1 所列。
表 1 各因素分级水平表
参数
水平 1 水平 2 水平 3 水平 4
最小车头 时距/ m
0. 5 1 2 4
平均停车 距离/ m
1 1. 5 2 3
等待换道 观察前方
1. 1 模型参数校正概念 模型参数校正是根据实地交通运行状况, 对
仿真系统中各个独立参数进行调整, 以使模型能 准确表达具体仿真对象的过程。需要校正的仿真 参数一般包括交通控制运行参数、交通流特性和 驾驶员行为特性等。参数校正的目的是使仿真输 出结果与实际测量的数据差异最小。 1. 2 模型参数校正流程
Y = 167 292 + 1 179X 1 + 0 122X 2 + 2 469X 3 - 0 532X 4
式中: Y 为路段行程时间; X 1 为最小车头时距; X 2 为等待换道消失时间; X 3 为观察前方车辆数;
X 4 为平均停车距离。 8) 根据回归模型, 以线性模型结果与实际测
量的行程时间近似或相等为判定标准, 得出几组 参数组合。得出的初步参数组合如表 2 所列。
6) 仿真系统涉及多个可控参数, 且每一个参 数都有不同的取值范围。若对每一种可能的情况 都做 相应的仿真实验, 显然 是时间所不允许的。 例如, 如果仿真系统有 8 个可控参数, 每个参数取 值分 为 5 个 级别, 则 需 要 做 的 仿 真 实 验 有 58 ( 390 625) 次。因此, 科学的实验设计对于参数校 正意义 重大。我们选 用拉丁方格法 进行实验设 计, 可使实验次数从 58 降到 54次。然后确定校核 参数为因变量, 可控的校正参数为自变量, 建立模 型[ 4, 5] 。
关键词 交通仿真模 型; 参数校正; VISSIM
Abstract: M icroscopic simulation models have been w idely used in traffic system management, co n trol and optimization; how ev er , most of the simulatio n parameters are determined according to the situa tions in foreign countries and not alw ays suitable for those in China. Firstly , this paper proposes a proce dure fo r micr oscopic simulatio n model calibr at ion. T hen taking a V ISSIM simulat ion example of Peking r oad in Shang hai as an ex ample, w e have designed the ex periment by using Latin Square algorithm and calibrated the simulation parameters by using the field data. Finally, it points out the aspects that need im provin g.
( 6) 观察前方车辆数。观察前方车辆数定义 为车辆在仿真中观测前方车辆的运行, 然后相应 的做出反映。缺省值是 2 辆。根据实际的经验, 取值为 1~ 4 辆。
5) 在本次仿真中, 应用拉丁方格算法对 4 个 待校正参数进行仿真实验, 每个参数分 4 个水平, 对于关键因素: 最小车头时距和平均停车距离做
模型参 数校 正在 国 外已 有研 究, Benekohal 1991 年 首 次 提 出 参 数 校 正 的 流 程 框 架[ 3] ; Helling a 于 1998 年提出 的参数校正 过程包括 7 个步骤[ 1] :
( 1) 定义研究目标; ( 2) 确定所需的实际数据; ( 3) 选择影响因素水平;
7) 经过多次运行, 确定模型参数。同时根据 仿真结果和仿真画面确定最佳的可控参数取值。
8) 根据仿真结果确定校正过程的中止。
2 参数校正应用
2. 1 仿真区域 仿真区域选定在上海市的一条主干道 北
京东路。北京 东路 为东 西向 的机 动车 专用 道, 2003 年 4 月对北京东路进行了道路条 件、流量、 速度、行程时间、排队等调查。信号配时从上海市 交巡警总队获得, 仿真区域如图 2 实线所示。
( 2) 车道变换距离。车道变换距离定义为驾 驶员为变换到理想车道( 由于车辆路径需要, 并不 是超车需要) 而开始试图变换车道的位置。它是 与紧急停车距离相关联的一个参数, 基于上述类 似的原因, 在本仿真中, 我们取固定值 200 m。
( 3) 最小车头时距。最小车头时距是车辆进 行车道变换所需要的与前方车辆的最小距离( 发 生在主动型车道变 换以及被动型 车道变换中) , V ISSIM 中缺省值是 0. 5 m, 显然, 按照中国的国 情, 此值偏小。我们的取值范围定于 0. 5~ 4 m。
时间/ s 车辆数/ 辆
45
1
60
2
80
3
12 0
4
6) 在仿真中, 随机数种子的不同对仿真结果 也有较大的影响, 因此分别取 4 个不同的随机数 种子, 这样最多共需 64 次试验, 就可得出精度较 高的模型参数。
7) 根据试验, 以行程时间为因变量, 待校正 参数为自变 量, 建立线性回归模型, 值得注意的 是, 此模型只是针对特定的北京东路区域。建立 的模型方程为
图 2 仿真区域 北京东路
2. 2 仿真模型- VISSIM 本研究使用的仿真模型是德国 PT V 公司的
VISSIM( 3. 6 版) 仿真软件。仿真模型基于时间 步长和驾驶员行为, 可模拟城市交通和公共交通 状况。软件使用包含跟车和车道变换逻辑的微观 交通流模拟模型。系统核心仿真模型 车辆跟 踪模型采用德国 Karlsruhe 大学 Wiedemann 教授 的 心理 物理学跟车模型 , 模型建立在司机反应 行为之上。
对仿真模型精度影响最重要的因素是模型对 车辆模拟的真实性[ 6] 。因此, 必须针对不同的模 拟对象, 对模型参数进行校正。车辆换道模型分 为主动型( 由于车辆期望更高的行驶速度) 和被动 型( 由于车辆路径需要) 换道模型。 2. 3 参数校正应用
1) 参数校正的目标是使 VISSIM 的输出结 果与校核指标差异达到设定 值。
Key words: tr affic simulation model; parameter calibration; V ISSI M
0引言
交通流仿真是再现交通流运行规律, 对交通 系统进行管理、控制和优化的重要实验手段和工 具。随着智能运输系统 IT S 在我国的逐步实施, 交通微观仿真软件在我国也得到了广泛的应用, 如 VISSIM、PARAMICS、CORSIM、AIM SUN2 等。交通微观仿真模型运用大量的独立参数来描 述交通系统运行、交通流特性以及驾驶员行为等, 参数的取值对仿真 结果有很大的影 响[ 1] 。在仿 真系统中, 这些模型参数均有缺省值, 同时也允许 用户对这些参数进行修正。缺省值往往是根据模 型开发国的情况确定的, 并不一定适合我国的实 际情况。所以, 针对具体的仿真对象, 必须对仿真 参数进行标定。