永磁同步电机SVPWM控制策略仿真研究
永磁同步电机SVPWM控制策略仿真研究
中图分类号 号 :
2009年第 42卷第 1 期
1001 6848( 2009) 01 0086 03
永磁同步电机 SVP WM 控制策略仿真研究
李 宏 , 张
1
勇 , 王晓娟 , 王文初
710072; 2. 91287 部队 , 上海
[ 1 10]
。
1
SVPWM 控制算法
SVPWM 控制算法的思想是: 当三相交流对称
正弦电压对电机供电时 , 交流电机在 空间中产生 圆形旋转磁 场, 从而 产生恒定 的电磁转 矩。若以 交流电机中的理想磁链 圆为基准圆 , 用逆变器不 同的开 关模式 所产生 的有效 矢量 来逼 近基 准圆 ,
( 2) ( 3)
Ux = Uy = 2U dc /3
86
永磁同步电机 SV PWM 控制策略仿真研究
李
宏, 等
立永磁同 步电机 SVPWM 控制系 统仿真 模型的 方 法。其系统设计框图如图 3所示。
图 1
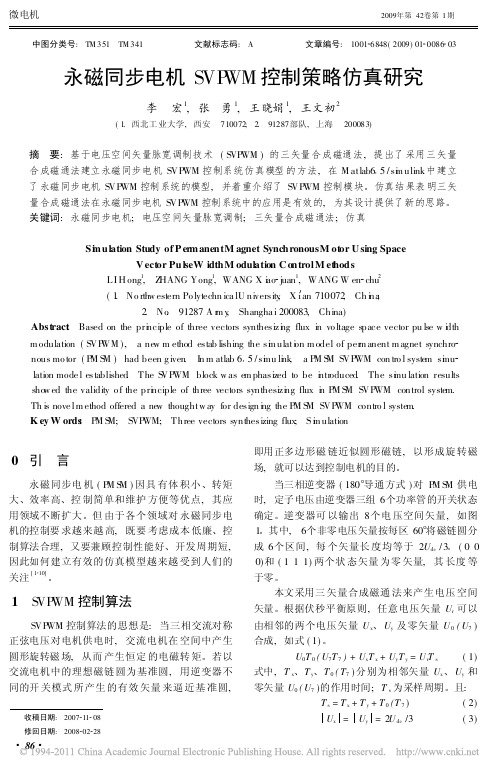
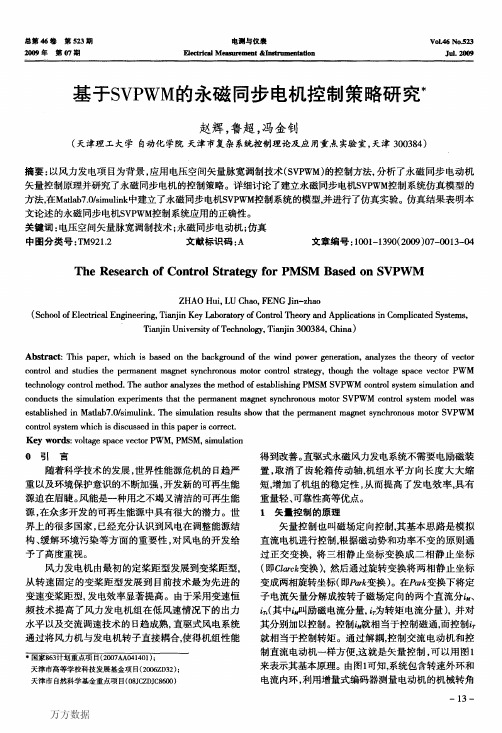
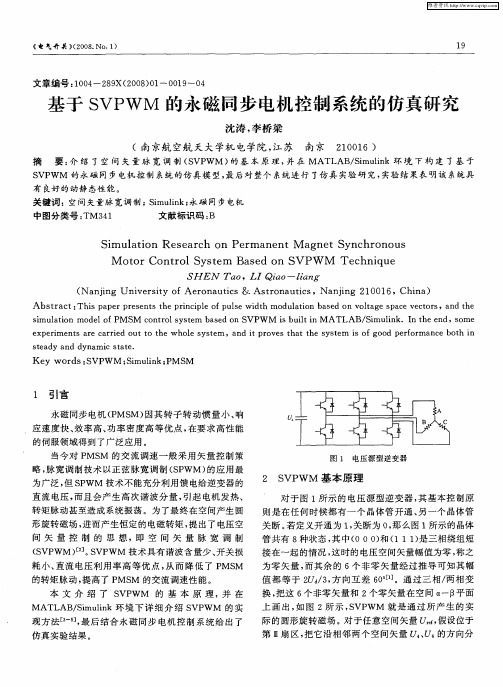
SV P WM 向量、扇区、波形、矢量合成图
如图 1 , 以 扇区 可得:
为 例, 由 三角形 正弦 定理
图 3 永磁同 步电机 SV P WM 控制系统结构图
2 控制系统模型建立
在永磁同 步电机数学模型 的基础上 , 提出建
图 5 扇区判断模块结构图
87
微电机
表 1 N 与扇区的对应关系 N 扇区 1 2 3 4 ! 5 ∀ 6 #
2009年第 42卷第 1 期
行比较时 , 若其差值大于滞环 比较器所定义 的滞 环宽度, 逆变器所对应的功率开关器件正向导通 , 负向关断 ; 反之, 若差值 小于滞环宽 度时, 功 率 开关器件状态不 变。从而生成 三相桥臂逆变 器功 率开关器件的 6 组控制信号。如图 7。
基于SVPWM的永磁同步电机控制

因此通过坐标变换将电机方程转换为一系列 的常系数微分方程,以简化分析便于研究。
01 永磁同步电机及其矢量控制系统
1.2 永磁同步电机的数学模型
2.1 SVPWM基本理论
SVPWM技术,也称作磁通正弦PWM技术,其调制波相当于在原正弦波 的基础上叠加了一个三次谐波。其主要思路是从电机的角度出发,采用整流 器空间电压矢量的切换以获得幅值恒定的准圆形旋转磁场,从而在不高的开 关频率(1-3kHz)条件下,使交流电动机获得了较控制更好的性能。
基于SVPWM的三相整流器控制具有如下优点: (1)三相直流电压利用率提高了15.47%,由于直流电压利用率的提高,在相 同直流电压条件下,可以提高三相SWPWM整流器网侧电压的设计,相对减少 了三相整流器网侧电流,降低了整流器网侧及功率开关管导通损耗,提高了整 流器的运行效率; (2)相同的波形品质条件下,SVPWM控制具有较低的开关频率,且平均降低 约30%,有效降低了功率开关管的开关损耗: (3)SVPWM控制具有更好的动态性能、更易于数字化实现。因 而,SVPWM控制具有很好的研究价值。
N 5 N 4
N 1
通过计算: N=4*C+2*B+A
N 6
N 3 N 2
02 SVPWM控制技术
2.2 SVPWM的算法实现
第二步:计算电压矢量作用时间Tx,Ty,T0: 根据扇区I电压矢量合成的过程,则每个矢量的作用
时间可以通过Uα和Uβ计算得到:
引人三个变量X,Y,Z,计算方法为:
U
T1 T
SVPWM的永磁同步电动机控制系统仿真与实验研究

0 引 言
随着 PM S M 应用领域的不断拓宽 , 对电机控 制系统的 要求 也越 来越 高 , 既 要考 虑成本 低廉 、 又需兼顾控制性能好 、开发周期短等特点
[1]
本文将不再细述 , 以下直接给出 PM S M 的数学模 型 、 SVPWM 整体控制方案和在 M atlab / Sim ulink 仿 真软件下针对 PM S M 实现 SVPWM 的方法 , 最后给 出仿真结果和试验波形 。
微电机
2008 年第 41 卷第 3 期
中图分类号 : T M341 T M351 文献标志码 : A 文章编号 : 1001 2 6848 ( 2008 ) 03 20048 204
基于 SVP WM 的永磁同步电动机控制 系统仿真与实验研究
张金利 , 景占荣 , 张玉瑞 , 白世东 , 贾歆莹
[5]
, 由于篇幅所限 ,
。
收稿日期 : ・4 8 ・
2007 204 2 04
© 1994-2008 China Academic Journal Electronic Publishing House. All rights reserved.
基于 SVPWM 的永磁同步电动机控制系统仿真与实验研究 张金利 , 等
- 3
s级 , 针对此问题 , 笔者提出并设
计了“ 积分斜率法 ” 产生三角波脉冲 。其原理是首先 利用 Matlab中自带的方波脉冲产生器 Pulse Genera2
tor设定其脉冲周期为 10
-4
s, 幅度为 10
- 4
-4
, 脉冲宽
- 4 - 4
度为 50% , 将所产生的波形减去常数 015 × 10 , 目的是产生幅度为 + 015 × 10 和 - 015 × 10 交替 的 、周期为 10
永磁同步电机控制策略研究及仿真

永磁同步电机控制策略研究及仿真一、本文概述永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)因其高效率、高功率密度、良好的控制性能等特点,在工业、交通、家电等领域得到了广泛应用。
随着电力电子技术和控制理论的发展,对PMSM的控制策略的研究也日益深入,旨在实现电机的高性能、高效率和可靠性。
本文主要针对永磁同步电机的控制策略进行研究和仿真分析。
本文首先对永磁同步电机的基本原理和控制方法进行了综述,包括电机结构、运行原理、数学模型等,为后续控制策略的研究奠定了基础。
详细讨论了几种常见的PMSM控制策略,如矢量控制(Vector Control)、直接转矩控制(Direct Torque Control, DTC)、模型预测控制(Model Predictive Control, MPC)等,分析了各种控制策略的优缺点及其适用场合。
接着,本文针对某特定应用背景,提出了一种改进的PMSM控制策略。
该策略在传统控制方法的基础上,引入了先进的控制算法和优化技术,旨在提高系统的动态性能、稳态性能和抗干扰能力。
本文还通过仿真实验,验证了所提控制策略的有效性和优越性。
二、永磁同步电机基本原理与特点永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)是一种利用永磁体作为磁场源,实现电能与机械能相互转换的装置。
其基本原理基于电磁感应和磁场相互作用,通过控制定子电流产生的磁场与转子永磁体磁场之间的相互作用,实现电机的旋转运动。
高效率:由于使用永磁体作为磁场源,无需额外的励磁电流,因此电机在运行时具有较低的损耗和较高的效率。
高功率密度:永磁体的使用使得电机能够在较小的体积内实现较高的功率输出,适用于需要紧凑设计的应用场景。
良好的调速性能:通过控制定子电流的频率和相位,可以实现对PMSM的精确速度控制,满足宽范围调速的需求。
低维护成本:永磁体通常具有较高的磁能积和稳定性,使得电机在运行过程中无需频繁更换磁极,降低了维护成本。
基于SVPWM的永磁同步电机矢量控制仿真研究_丁硕

基于SVPWM的永磁同步电机矢量控制仿真研究*丁 硕1 崔总泽2 巫庆辉1 常晓恒1 胡庆功1(1.渤海大学工学院 锦州 121013;2.哈尔滨工业大学电气工程及自动化学院 哈尔滨 150001)摘 要:为了对高性能永磁同步电动机矢量控制系统进行准确分析,在分析永磁同步电机数学模型和空间矢量方法的基本原理的基础上,采用经典速度、电流双闭环控制方法建立了永磁同步电机空间矢量控制系统的仿真模型,详细说明了仿真系统模型的4个组成模块,并在MATLAB/Simulink环境下进行仿真实现。
仿真结果表明:系统构建方法简单,基于空间矢量控制方法的同步电动机系统的响应速度快,系统运行平稳,仿真波形与理论分析一致,验证了该仿真实验平台的有效性。
关键词:永磁同步电机;空间矢量脉宽调制;仿真;Simulink中图分类号:TM301.2 TN710.9 文献标识码:A 国家标准学科分类代码:510.8020Simulation study of vector control of permanent magneticsynchronous motor based on SVPWMDing Shuo1 Cui Zongze2 Wu Qinghui 1 Chang Xiaoheng1 Hu Qinggong1(1.College of Engineering,Bohai University,Jinzhou 121013,China;2School of Electrical Engineering And Automation,Harbin Institute of technology,Harbin 150001,China)Abstract:To accurately analyze the vector control system of a high-performance permanent magnet synchronous motor,inthis paper,a simulation model of the control system of space vectors of a permanent magnet synchronous motor is estab-lished using the classic speed and current dual-closed-loop control method on the basis of analysis of the mathematicalmodel of synchronous motor and the basic principles of the space vector method.A detailed description of the four compo-nent modules of the simulation model is given,and the simulation is conducted via MATLAB/Simulink.The simulationresults show that the system establishment method is simple,the response speed of the synchronous motor system basedon space vector control method is fast,the system runs smoothly and the simulation waveforms are consistent with thetheoretical analysis.The effectiveness of the simulation experiment platform is verified.Keywords:permanent magnetic synchronous motor;SVPWM;simulation;Simulink 收稿日期:2014-04*基金项目:国家自然科学基金(61104071)、辽宁省教育厅高校科研计划(L2010002)资助项目1 引 言永磁同步电机具有结构简单、转矩脉动小、可高速运行等特点,在高精度伺服系统的执行器中得到广泛的应用。
基于SVPWM的永磁同步电机仿真分析

Ab tac sr t
T i p p rit d c ste p icpe o p c e trp le wit d lt n (V WM) n n l e h o to picpe hs a e nr u e h r il fs a e v co us dh mo uai o n o SP , d a ay s te c nrl r il a z n
令:
UI 自 = () 1
13 电压 矢 量 切 换 时 间 的计 算 . T 、 b T 定义 如下 : a T 、c
T =( - 1 T ) 4 a T T 一 2/
T b=T a+71 2 _/
乎 U一 a U一 一 3乎 № =
( 2 ) ቤተ መጻሕፍቲ ባይዱ ( 3 )
令 :
‰
号 进 行 非 运 算 , 以获 得 P M2 P M P 可 W 、 W 4、WM6信 号 波形 。
2 永 磁 同 步 电 机 矢 量 控 制
c 孚 孚 + ,
( 5)
三 相 P M 在 d q坐 标 下 , 定 子 电压 方 程如 下 : MS — 其
则 扇 区 中相 邻 2个 基 本 矢 量 的作 用 时 间 如 表 2所 示 。T , 1
T 2分别 表示 相 邻 两 个 基 本 相 量 作 用 时 间 。对 作 用 时 间还 应 进 行
饱 和 判 断 , T + 2 T时 , 取 : 1 T T ( 1 T )T = 2% 当 1T> 应 T = 1 / T + 2 ,2 T
电压 矢 量 所 在 的 扇 区 。
表 1 N 值 与扇 区对 应 关 系
基于SVPWM的永磁同步电机控制系统的仿真.

基于SVPWM的永磁同步电机控制系统的仿真随着电动机在社会生产中的广泛应用,由于永磁同步电机具有结构简单、体积小、效率高、转矩电流比高、转动惯量低,易于散热及维护等优点,特别是随着永磁材料价格的下降、材料的磁性能的提高、以及新型的永磁材料的出现,在中小功率、高精度、高可靠性、宽调速范围的伺服控制系统中,永磁同步电动机引起了众多研究与开发人员的青睐,其应用领域逐步推广,尤其在航空航天、数控机床、加工中心、机器人等场合已获得广泛的应用。
我国制作永磁电机永磁材料的稀土资源丰富,稀土资占全世界的80%以上,发展永磁电机具有广阔的前景。
第一章永磁同步电机的矢量控制原理1.1 永磁同步电机控制中应用的坐标系交流电机的数学模型具有高阶次,多变量耦合,非线性等特征,难以直接应用于系统的设计和控制,与直流电机单变量,自然解耦和线性的数学模型相比较,交流电机显得异常复杂。
因此需要通过适当的转换,将交流电机的控制变换为类似直流电机的控制将大大简化交流电机控制的复杂程度。
永磁同步电机矢量控制的基本思想是把交流电机当成直流电机来控制,即模拟直流电机的控制特点进行永磁同步电机的控制。
为简化感应电机模型,可将电机三相绕组电流产生的磁动势按平面矢量的叠加原理进行合成和分解,使得能够用两相正交绕组来等效实际电动机的三相绕组。
由于两相绕组的正交性,变量之间的耦合大大减小。
1.1.1系统中的坐标系1)三相定子坐标系(U-V-W坐标系)其中三相交流电机绕组轴线分别为U、V、W,彼此之间互差120度空间电角度,构成了一个U-V-W三相坐标系。
空间任意一矢量在三个坐标上的投影代表了该矢量在三个绕组上的分量。
2)两相定子坐标系(α-β坐标系)两相对称绕组通以两相对称电流也能产生旋转磁场。
对于空间的任意一矢量,数学描述时习惯采用两相直角坐标系来描述,所以定义一个两相静止坐标系,即α-β坐标系。
它的轴α和三相定子坐标系的A轴重合,β轴逆时针超前α轴90度空间电角度。
基于SVPWM控制的永磁同步伺服电机调速研究
以永 磁 同步 电机 的 磁路 和绕 组对 称 , 电 机 磁
MA T L A B\ S i m u l i n k中集 成 的永磁 同步 电机模 型在 调 速系 统 中 存 在 着参 数 不 可 动态 修 改 , 坐标 定义 不符 合 常 规 逻 辑 等不 足 , 笔 者 重新 建 立 了 永 磁 同步 电机 的仿 真模 型 。永 磁 同步 电机 的转 子 结
修, 体 积 比较小 , 并且 对 转速 和功 率 的提 高很 有 帮
助 。笔 者对 由伺 服 驱动 器所 构成 的永 磁 同步 伺 服 系统 进 行 了数 学 描 述 , 并 采 用 电 压 空 间矢 量对 永 磁 同步交 流 伺服 系 统进 行 控 制 , 在 MA T L A B环境 中, 固有 的永 磁 同步 电机 模块 虽然 参数 可 以设 定 , 但 由于模 型 是 不 完 全 开 放 的 , 所 以限 制 了一 些 算 法 的应 用 。笔者 对永 磁 同步 电动 机进 行 了完 整 的
摘 要 通 过 电 压 空 间 矢 量 控 制 方 法 时 永 磁 同 步 伺 服 电机 进 行 了 研 究 。 在 传 统 S V P WM 算 法 的 基 础 上, 对 扇 区判 断环 节 、 电压 矢量 作 用 时 间 求 解 环 节 进 行 改进 , 化 简 了传 统 计 算 方 法 中 的 繁 琐 过 程 。 应 用
多相 平衡 电流获得 旋转 磁势 。笔 者应 用坐 标 变换
来 实现永 磁 同步 电机模 型 的简化 和解 耦 。
பைடு நூலகம்
数学 建模 并设 计 得 出全开 放 的永磁 同步 电机 仿 真
模 块 。依 据 系统 模 型 着 重 研 究 了矢 量 控 制 策 略 ,
永磁同步电机的空间矢量脉宽调制(SVPWM)原理及仿真研究

- 41 -
永磁同步电机的空间矢量脉宽调制(SVPWM)原理及仿真研究
作者: 作者单位: 刊名: 陈娜, 李杨声, 李福瑞, 王程勇 湖北三江航天红峰控制有限公司,湖北 孝感,432001 科技创新与应用
英文刊名: 年,卷(期):
科技创新与应用
永磁同步电机的空间矢量脉宽调制 (SVPWM) 原理及仿真研究
陈 娜 李杨声 李福瑞 王程勇 湖北 孝感 432001) (湖北三江航天红峰控制有限公司,
克服了直流伺服电动机机械式换向器和电刷 摘 要: 永磁同步电机在伺服控制系统应用中得了迅速的发展, 其优越的调速性能, 带来的一系列限制。文章主要介绍了空间矢量脉宽调制原理及算法流 程;在 Matlab7.6.0\simulink 建模仿真 平台 上搭建了基于 且对模型进行了系统仿真。 SVPWM 算法的永磁同步电机控制系统的仿真模型, 算法; 仿真 关键词: 永磁同步电机; 1 引言 正弦脉宽调制 (SPWM) 随着电力电子的发展, 在交流调速系统中得 到了广泛应用,经典的 SPWM 控制主要是将电压变频器的输出电压尽 同时, 还产生高次谐波分 量接近正弦波, 但并未估计输出电流的波形, 量引起电动机发热、转矩脉动,甚至使系统振荡。而电压矢量控制 (SVPWM) 是从输出电压的角度出发, 目的在于可以生成一个可以调频 调压的三相对称正弦供电电源,SVPWM 是一种优化的 PWM 控制技 降低 术, 能明显减小逆变电路输出电流的谐波成分及电机的谐波损耗, 电压利用率高, 在交流伺服系 转矩脉动, 且其控制简单, 数字实现方便, 统中得了广泛应用。 本文将详细介绍基于 SVPWM 的原理以及永磁同步电机控制算 用 Matlab7.6.0\simulink 软件进行建模、 仿真。 法, (SVPWM) 2 空间矢量脉宽调制 原理 当用三相平衡的正弦电压向交流电动机供电时,电动机的定子磁 磁链矢量的运动轨迹形成圆形的 链空间矢量幅值恒定, 并以恒速旋转, 所以只要按照跟踪 空间旋转磁场 (磁链圆) , 从而产生恒定的电磁转矩, 圆形旋转磁场来控制逆变电路向交流电动机提供可变频电源,并能保 “磁链圆” “磁链跟踪控制” 证电动机形成定子 , 这种控制方法称作 , 磁链 所有又称 “电压空间矢 的轨迹是交替使用不同的电压空间矢量得到的, 即 SVPWM” 量 PWM 控制, 。 三相逆变电路输出状态共有 8 种开关模式,其中 000 和 111 开关 模式时逆变电路电压输出为零, 这两种开关模式成为零状态。所以有效 开关模式为 6 种,由 6 种开关模式和线电压的关系可以得出基本电压 见图 1, 空间矢量, 相邻空间矢量的矢量间隔为 60毅, 而两个零矢量幅值 为零, 位于中心。 当六个非零空间矢量单独输出后,定子磁链矢量的矢端的运动轨 如果能把正六 迹就是一个正六边形, 而我们需要的是圆形的运动轨迹, 就越接近圆形, 按照这个思路, 边形变成正多边形, 正多边形的边越多, 我们必须使得三相逆变器有更多的开关状态,一种方法是利用六种基 本空间电压矢量的线性时间组合来得到更多的开关状态。根据参考输 出电压矢量的区间位置,选择与之相邻的基本电压空间矢量来合成参 图 2 为电压空间矢量的线性组合。t1 和 t2 分别是 UX 考输出电压矢量, 在每一个 T 期间, 和 UX+60 作用时间, T 是 Uref 作用时间, 都改变相邻基 故当 T 本矢量作用时间, 并保证所合成的电压空间矢量的幅值都相等, 磁链轨迹就是 足够小时, 电压空间矢量的轨迹就近似圆形的正多边形, 即形成 “圆形磁场” 一个正多边形, 。
基于PR控制的永磁同步电机SVPWM仿真研究
基于PR控制的永磁同步电机SVPWM仿真研究张刚(西安航空职业技术学院,陕西西安710089)摘要:针对传统PI控制对交流信号跟踪能力差的问题,研究了一种改进型比例谐振(PR)控制算法,并将其引入到永磁同步电机控制系统中。
用改进型PR控制器替代传统的PI控制器,可以减少一次Park坐标变换,并能实现对交流信号的无静差跟踪。
在Matlab/Simulink中搭建基于PR控制的永磁同步电机SVPWM仿真模型,仿真结果表明:引入改进型PR控制器后的永磁同步电机系统不但能够实现对交流输入信号的无静差跟踪,而且可以有效地对特定低次谐波进行抑制,对改善输出电流畸变率和降低转矩脉动具有明显效果。
关键词:PR控制器;坐标变换;SVPWM;低次谐波中图分类号:TM341;TM351;TP15文献标志码:A文章编号:1003-7241(2019)06-0006-05Research on SVPWM Simulation of Permanent Magnet Synchronous Motor Based on PR ControlZHANG Gang(Xi'an Aeronautical Polytechnic Institute,Xi'an710089China)Abstract:Aiming at the problem of poor tracking ability of traditional PI control for AC signals,an improved proportional resonant (PR)control algorithm is studied and introduced into permanent magnet synchronous motor control system.With the im-proved PR controller instead of the traditional PI controller,the Park coordinate transformation can be reduced and the stat-ic error tracking of the AC signal can be realized.The simulation model of SVPWM based on PR control is built in Mat-lab/Simulink.The simulation results show that the permanent magnet synchronous motor system based on PR controller can not only realize no-static tracking for AC input signal,but also can suppress certain low-order harmonics effectively, to improve the output current distortion rate and reduce the torque ripple has obvious effect.Key words:PR controller;coordinate transformation;SVPWM;low-order harmonics1引言永磁同步电机(PMSM)具有体积小、效率高、功率因数高等优良特性,特别在电动两轮车和三轮车控制领域得到广泛应用。
基于SVPWM的永磁同步电机控制
基于SVPWM的永磁同步电机控制目录1. 概述 (1)2. 仿真各模块介绍及参数设置 (3)3. 仿真结果 (6)4. MATLAB学习心得 (8)1.概述本次任务为设计一种基于SVPWM的永磁同步电机转速控制系统,采用PID控制算法,可以实现对永磁同步电机转速准确控制,仿真模拟了以下三个步骤:电机空载启动,空载调速和电机突然带载。
设计要求:1.要求对电机控制为dq轴电流解耦控制。
2.仿真要求电机的转速有较快的响应速度,且具有较好的稳定性。
3.可以实现无级调速,且仿真的误差与设定转速误差很小。
电机控制仿真的Simulink示意图和系统组成框图如图1-1和1-2所示:图1-1基于SVPWM永磁同步电机控制仿真图1-2基于SVPWM永磁同步电机控制系统组成框图系统是由转速调节模块、负载调节模块、PID控制模块、SPVPWM信号产生模块、永磁同步电机组成。
在用户预先设好转速与加载时间及大小后,控制系统就可以对永磁同步电机进行仿真。
具体原理如下:仿真中为实现对电机的控制,首先是将预计转速输入到PID模块中,产生控制晶闸管通断的SVPWM信号,再由SVPWM信号装置产生PWM信号以追踪永磁同步电机的磁链圆实现对永磁同步电机的转速控制。
以上所述为控制的前向通道,控制的反馈是将电机的q轴和d轴电流分两个闭环反馈给PID控制模块,用PID算法实现对永磁同步电机的精准控制。
MALTAB及其在电气工程中的应用2.仿真各模块介绍及参数设置2.1 PID控制模块PID控制模块是本次仿真的主要控制模块,本次仿真采用的是零d轴电流控制,通过调节q轴电流,控制电机转速,采用双闭环系统设计,将从永磁电机读取到的d轴电流和q轴电流以及当前电机的转速反馈回PID控制模块中。
PID控制模块的示意图如图2-1所示。
图2-1 PID控制模块示意图对电机转速和d轴电流的PID控制都是将实际的量与给定的控制量的对比,将误差传给PID模块,经对转速的PID控制以后,输出的为q轴电流值,将实际q轴电流与PID输出的对比结果再将控制信号输入给SVPWM产生装置。
基于SVPWM的永磁同步电机控制策略研究
压转换成。邸平面直角坐标系中的分量。 可以利用图2中6个非零的基本电压空间矢量的
线性时间组合来得到更多的开关状态,用来保证电压
空间矢量以圆形运行轨迹为目标,则可以产生谐波较
少的且直流电源电压利用率较高的输出。
2.1基本空间矢量作用时间的计算
电压空间矢量的线性组合见图3,以、以和以分别
代表相邻的基本电压空间矢量(其中玑和以为以逆时
图2基本电压空问矢量
Fig.2 Basic voltage space vector —-14—.
万方数据
当三相逆变器(180。导通方式)对PMSM供电时。
定子电压由逆变器三组6个功率管的开关状态确定。
逆变器可以输出8个电压空间矢量,如图2所示。其中, 6个非零电压矢量按每区600将磁链圆分成6个区间,
Mint电&嗣I与ns仪t裹rmmmtation
Fleetrled
VoL46 No.523
JuL 2∞9
式中t-和玢别是以和以(或以)作用的时间;乃提以舴
用的时间。
t4w谨Ux
Ux
.
图3电压空间矢量的线性组合
Fig.3 A linear combination of the voltage space
Abstract:,11lis paper,which is based on the background of the wind power generation,analyzes the theory of vector
control and studies the permanent magnet synchronous motor control strategy.though the voltage space vector PWM technology control method.The author analyzes tlle method of establishing PMSM SVPWM control system simulation and conducts the simulation experiments that the permanent magnet synchronous motor SVPWM control system model was estabhshed in Matlab7.0/simulink.The simulation results show that the permanent magnet synchronous motor SVPWM
永磁同步电机直接转矩控制(svpwm)
三相永磁同步电动机直接转矩控制技术及仿真研究 1引言随着社会实际生产要求的不断提高,现代电机控制技术也不断得以升级。
继矢量控制之后,1986年日本I.TakhaShi 和德国M.Depenbrock 分别提出了直接转矩控制技术。
直接转矩控制(Direct Torque Control ,DTC)是基于定子磁场定向和电压空间矢量分析的方法,根据转矩偏差、磁链偏差及定子磁链的空间位置,选择合适的电压矢量。
这项技术的问世,以其新颖的控制思想、简洁明了的系统结构、优良的动静态性能等优点受到普遍关注并被广泛研究。
常规的DTC 方案其实是一种Bang —Bang 控制方法:针对定子磁链幅值和转矩偏差以及磁链的空间位置, 在一个控制周期内,选择和发出单一空间电压矢量,这个电压矢量要同时控制磁链和转矩的误差方向,而忽略了转矩和磁链误差大小,从而经常造成转矩和磁链脉动,不能达到期望的最佳控制效果。
减小滞环容差可以减小脉动,但又会导致逆变器的开关频率增大,开关损耗随之增加;矢量细分法改善了磁链轨迹,但结构相对复杂。
矢量调制 (Space V oltage Vector Modulation)是在一个控制周期内,通过相邻电压矢量和零矢量合成得到所需的任意电压矢量,实现电压矢量的连续可调。
本文在分析了直接转矩控制原理(DTC)和空间电压矢量脉宽调制技术(SVPWM)的基础上,做了基于磁链空间电压矢量脉宽调制技术的永磁同步电机直接转矩控制技术的仿真。
1直接转矩控制原理永磁同步电机在转子坐标系下的数学模型:⎥⎦⎤⎢⎣⎡ψ+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡+-+=⎥⎦⎤⎢⎣⎡f q d q d q d q d i i pL R L L pL R u u ωωω0 (1) []sm q d s sm q f q d sn e L L L L L P t δδ2sin )(sin 243-ψ-ψψ= (2)[]t sm q d s sm q f q d s n t t d d L L L L L P d d eδδδ2cos )(2cos 243-ψ-ψψ= (3)式中:q d q d q d L L i i u u ,,,,,——定子电压、电流、电感在q d ,轴上的分量;s f ψψ,——励磁磁链和定子磁链;p P t n e ,,——电磁转矩、转子极对数和微分算子;δsm ——负载角;式(2)表明,电机参数确定后,在实际运行中,永磁同步电机转子上励磁磁场的磁链幅值一般为恒值,为保证充分利用电动机铁心,通常要使定子磁链的幅值为额定值,这样就可以直接通过控制负载角δsm 的大小来控制电磁转矩的大小,这就是DTC 的核心思想。
基于SVPWM过调制的超前角弱磁控制永磁同步电机的策略研究
overmodulation
0 引言
伴随电力电子技术不断革新,永磁同步电机
( Permanent Magnet Synchronous Motor,PMSM) 在
控制与应用技术I EMCA
違 权 控 刹 名 阄 2018,45 (2)
基 于 SVPWM过调制的超前角弱磁控制
永磁同步电机的策略研究#
刘雨石, 乔鸣忠, 朱 鹏 ( 海 军 工 程 大 学 电 气 工 程 学 院 ,湖 北 武 汉 4 3 0 03 3 )
摘 要 :研 究 了 电 动 车 用 内 置 式 永 磁 同 步 电 机 的 控 制 策 略 ,提 出 了 超 前 角 弱 磁 控 制 与 空 间 矢 量 脉 宽 调 制
( S V P - M ) 过 调 制 结 合 的 控 制 系 统 。超 前 角 弱 磁 控 制 使 用 转 速 、电 流 和 电 压 的 3 个 闭 环 控 制 ,电 机 端 电 压 与 直
流侧电 压 电 压 控 制 环 ,产 生 电 机 弱 磁 的 电 流 超 前 角 直
交 直 轴 电 流 。*v p - m 过调制
Modulaiton,PWM ) 过 调 制 区 ,Joachim Holtz 和
Silverio Bolognan? [13_14]早 别 提 出 了双模
式过调制 和 式过调制 。 [1"] 提出基于叠加原理的空间矢量脉宽调制(Space
Abstract:The control strategy of built-in permanent magnet synchronous motor for electric vehicle was studied, and a control system combining super-angle weakening control and SVPWM overmodulation was proposed. The front angle weak magnetic control used the three closed-loop control of the speed, current and voltage. The motor terminal voltage and the DC side voltage form the voltage control loop, which produced the motor current field. SVPWM overmodulation algorithm could effectively improve the inverter output voltage fundamental amplitude, the motor used the field weakening control mode to achieve the maximum speed after the inverter into the modulation state, the maximum expansion of the speed range. The control system was simulated and the simulation results proved the correctness and feasibility of the theoretical analysis.
基于SVPWM的永磁同步电机控制系统建模与仿真

M o eig a d Smua in o d l n i l to fPM S nto y t m s d o VPW M n M Co r lS s e Ba e n S
DON G She g yng .SU N n—i Shu ho — ng
压 矢量 u 位于 Ⅲ 扇 区 , u 可 由相 邻矢 量 U , 。 则 U 和零 矢 量 £ ( ) 合 而成 。 据伏 秒平衡 原则 可得 ] , 组 o 根 :
T。 = U + T6 + To ( , ) U = = U6 U。 【7
式中: 丁 为采 样周 期 ; 4 T , o 别 为逆 时 针旋 转 的 T , 6T 分
m ehod o nt gr lsop f r r d i he t ing e pule i op e t fi e a— l o p o ucng t ra l s s pr os d. The sm ulto xp rm e t f r h who e s t m a e i a i n e e i n s o t e l yse r c r id O . The e f ci e n s n or e t e soft od la e v rfe he sm ulton r s ls T h r f e, a u e u e e — a re Ut fe tv - e s a d c r c n s hem e r e ii d by t i ai e ut. e e or s f lr f r e ea ss a e o f r d f h c ua e i nc nd ba i r fe e or t e a t ld sgn ofPSM S c t o y t m. on r ls s e Key r wo ds:v c orc e t onto ;PM SM ;d bl-o o r y t m ;m e ho ntgr — l rl ou e l op c nto1s s e t d ofi e alsop
基于SVPWM的电机控制系统仿真研究
武汉理工大学学报 � � � 信息与管理工程版 V . 28 N .7 J O URNAL O F WUT ( INF O R M � � ATIO N & M ANAG E M E NT E NG INE E RING ) J .2006
文章编号: 100 7- 144X (200 6 ) 0 7- 0 0 91 -0 4
基 于
的 电 机 控 制 系 统 仿 真研 究
罗文辉, 李 璇
(武汉理工大学 自动化学院, 湖北 武汉 43 00 7 0)
� � � � � 摘 要: 在分析 电压空间向量 ( SV P W M ) 的基本原理的基础上, 利用 M 6 . 5 软件建 立了 PM SM 矢量 控制系 统仿真模型。系统采用双闭环控制, 电流采用 P I 控制, 以及速度采用 P ID 控制。仿真结果表明, 采用 SV P W M 供电的 P M SM 变频调速系统有好的动态性能和稳态精度。 关键词: 永磁同 步电动机; SV P W M ; 电机控 制; 系统仿真 中图法分类号: TP 273 文献标识码: A
.
系统设计框图
收稿日期: 2006- 05 -15 . 作者简介: 罗文辉 ( 196 8-) , 女, 湖北武汉人, 武汉理工大学自动化学院讲师 . 基金项目: 湖北省自然科学基金资助项目 ( 2005 A BA282) .
92
武汉理工大学学 报
Байду номын сангаас信息与管理工程版
20 0 6 年7 月
� 工具 � 箱 � 中 丰 富 的 模 块 库, 建立 式中, 、 分别为 、 轴电感系数; 为定子绕 � � � � 控制系 统仿真模型, � � 系统设计框 图如图 2 组电阻; 、 分别为 、 轴的定子电流; 、 分 � � � � 所示。 里面包含了永磁同步电机的 别为 、 轴的定子电压; 为转子角速度; 为 � � � 仿真和测量模块, 因此无需再对电机的仿真模型 � 转子永磁磁 极与定子绕组 匝连的磁链的幅 值; 进行编程, � 减少了研究时间。 为电机极对数; 为电磁转矩, 为转动部分的转 � � 动惯量; 为机械阻尼系数; 为机械负载转矩; � 为定子角位置。 中的永磁同步电机模块就是基于上述 � � � � � � � � � � � � � � � � � � 数学模型的。仿真过程中, � � � � � � � � � � � � � � � � � � � 模块和 D 模块往往作为一个整体使用, 它们一起构 成永磁同步电机控制系统的仿真对象。由于和测 量模块相连, 该仿真对象可以观测到很多物理量: � � � � � 线电流 、 、 ;、 轴电流 、 ; 、 轴电压 、 � � � � � � � � ; 转子转速 ; 转子位置角 ; 电磁转矩 。这 � � � �
基于SVPWM的永磁同步电机控制系统的仿真研究
( ni g Un v r i fAe o a tc Na j ie st o r n u is& Asr n u is n y to a t ,Na j g 2 0 ,Ch n ) c ni 1 1 n 0 6 ia
文 献标 识码 : B
Si u a i n Re a c n Pe m a e tM a ne m l to s r h o r n n e g tSyn hr no s c o u M o o nt o ys e Ba e t rCo r lS t m s d on SV PW M c i ue Te hn q
smu a in mo e f i lt d l o o PMS c n r l y tm a e nS M o t o se b s d o VPW M sb i n MATLAB/ i l k.I h n s i ul i t S mu i n n t ee d,s me o
接 在一起 的情况 , 时 的 电压空 间矢 量幅 值为零 , 之 这 称 为零 矢 量 , 其 余 的 6个 非 零 矢 量经 过 推 导 可知 其 幅 而 值 都 等 于 2 / , 向互 差 6 。 Ud3 方 0[ 。通 过 三 相 / 相 变 两 换, 把这 6 非零 矢 量和 2个零 矢 量在 空 间 a 个 —p平面 上 画 出 , 图 2所 示 , VP 如 S WM 就 是 通 过 所产 生 的 实 际 的 圆形 旋 转磁 场 。对 于任 意 空 间矢量 U f假设位 于 — 第 Ⅲ扇 区 , 它 沿相 邻 两 个 空 间矢 量 、 的方 向分 把
沈 涛 , 桥 梁 李 (南 京航 空航 天 大 学 机 电学 院 , 苏 南 京 2 0 1 江 1 0 6)
永磁同步电机SVPWM仿真研究
S imula tion Research on PM SM Con trol System Ba sed on SVPWM Techn ique
M E I B ai2shan, CHENG Xiao2yong, YANG L in2tao
id , iq ———定子基于 d2q轴系的电流 ;
ψ d
,ψq
———定子基于
d2q轴系的磁链 ;
Ld , Lq ———定子基于 d2q轴系的等效电感 ;
Ra ———定子电阻 ;
ψ f
———转子永磁磁链
;
ω r
———转子电角速度
;
ω m
———转子机械角速度
.
注 : a2b2c———定子三相静止轴系 ,以上标 s表示 ; d2q———转子两相旋转轴系 ,以上标 r表示 ; q———轴沿转子旋转方向超前 d轴 90°; θr ———磁极位置角 (电角度 ). 图 1 永磁同步电机模型
第 25卷第 6期 2009年 12月
上海电力学院学报
Jou rnal of Shanghai U niversity of E lectric Pow er
文章编号 : 1006 - 4729 (2009) 06 - 0525 - 05
Vol. 25, No. 6 Dec. 2009
永磁同步电机 SVPWM 仿真研究
iq id
=
2 3
coθs r cos(θr 2120°)cos(θr +120°) sinθr sin (θr 2120°) sin (θr +120°)
永磁同步电机 SVPWM控制及仿真毕业论文

永磁同步电机 SVPWM控制及仿真毕业论文第一章绪论1.1本课题的研究意义及目的1.1.1本课题的研究意义永磁同步电机(permanent magnet synchronous motor)是指采用永磁磁铁为转子的同步电动机。
永磁同步电机具有结构简单,体积小、重量轻、损耗小、效率高、功率因数高等优点,在工农业生产中,有大量的生产机械要求连续的以大致不变的速度运行,例如风机、泵、压缩机、普通车床等。
这类机械设备大量采用普通三相感应电动机驱动,但感应电动机的效率和功率因数较低,能源浪费厉害。
随着社会对节能的重视和国家对高效电机和永磁电机的推广力度的加大,这些节能潜力大的设备都有被永磁电机和普通高效电机代替的需求。
而这些机械采用永磁电机则可获得比普通电机高得多的效率和功率因数。
在某些场合,负载率低,若采用普通电机,轻载时功率因数和效率低,经济运行范围窄,造成大量的电能浪费。
若采用永磁电机,部分设备可适当的降低电机容量,可以实现高效、高功率因数和宽广的经济运行范围,节约大量的电能。
在一些生产机械中,要求多台电动机同步运行。
普通电机的转速和电源频率之间没有严格的固定关系,随着负载的变化而变化,即使是同一厂家生产相同规格的感应电动机,其转速也有一定的差别,难以保证多台电动机以相同的转速运行。
永磁同步电动机的转速与电源频率之间有严格的固定关系,只要多台电动机的供电电源频率和电动机极对数相同,就可以方便的实现同步运行。
这在某些纺织设备上已得到很好的推广。
既节约了能源,又能很方便的实现电动机同步运行。
这对于国家提出的节能减排政策和国家社会主义现代化建设具有最要意义。
1.1.2 课题目的本课题以永磁同步电机为被控对象,设计了两种控制器,即传统的线性PI控制器和自适应的模糊控制策略。
永磁同步电动机的矢量控制可以获得很高的性能,该系统中控制器的设计对系统的性能起主要作用。
线性PI控制器的主要组成部分为比例—积分环节,积分控制器的输出与输入偏差对时间的积分成正比。
SVPWM在永磁同步电机系统中的应用与仿真

S n h o o sM o o y tm y c r n u t rS se
S i u W a g J n F n Ja Yi n o g , o g Li i g u n , J n i g , a in , n Ya d n Zh n p n
( . p . f ia c 1 De t o d n e& e gn e ig No 2 9Re e rh I si t fCh n d a c n u tis Ch n d 0 41Chn ; Gu n ie rn , . 0 sa c n tt eo i aOr n n eI d sre , e g u61 0 ia u
2 Ma a e n f efr ce t cR sac , . 8R sac si t f hn d a c d sr sM in a g6 0 hn ) . n g me t i ini ee rh No 5 ee rhI tueo iaOrn n eI uti , a y n 2 0C ia Of c o S i f n t C n e 1 0
摘 要 : 为 了提 高工作 效率 ,使 电机 工作状 态更加 平稳 ,对 S WM 在 永 磁 同步 电机 系统 中的应 用 与仿真 进 行研 VP 究 。分 析 了永磁 同步 电动机 矢量控 制 系统 结构 及 S WM 技 术 原理 ,在 Malb Smuik环 境 中,建 立 了永磁 同步 电 VP t /i l a n
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
微电机2009年第42卷第1期中图分类号:T M351 T M341 文献标志码:A 文章编号:100126848(2009)0120086203永磁同步电机S VP WM 控制策略仿真研究李 宏1,张 勇1,王晓娟1,王文初2(1.西北工业大学,西安 710072;2.91287部队,上海 200083)摘 要:基于电压空间矢量脉宽调制技术(S VP WM )的三矢量合成磁通法,提出了采用三矢量合成磁通法建立永磁同步电机S VP WM 控制系统仿真模型的方法,在Matlab615/si m ulink 中建立了永磁同步电机S VP WM 控制系统的模型,并着重介绍了S VP WM 控制模块。
仿真结果表明三矢量合成磁通法在永磁同步电机S VP WM 控制系统中的应用是有效的,为其设计提供了新的思路。
关键词:永磁同步电机;电压空间矢量脉宽调制;三矢量合成磁通法;仿真S i m ul a ti on Study of Per manen tM agnet SynchronousM otor Usi n g SpaceVector Pulse W i dth M odul a ti on Con trolM ethodsL I Hong 1,Z HANG Yong 1,WANG Xiao 2juan 1,WANG W en 2chu2(1.Northwestern Polytechnical University,Xi πan 710072,China;2.No .91287A r my,Shanghai 200083,China )Abstract:Based on the p rinci p le of three vect ors synthesizing flux in voltage s pace vect or pulse width modulati on (S VP WM ),a ne w method establishing the si m ulati on model of per manent magnet synchr o 2nous mot or (P MS M )had been given .I n matlab 615/si m ulink,a P MS M S VP WM contr ol syste m si m u 2lati on model established .The S VP WM bl ock was e mphasized t o be intr oduced .The si m ulati on resultsshowed the validity of the p rinci p le of three vect ors synthesizing flux in P MS M S VP WM contr ol syste m.This novel method offered a ne w thought way f or designing the P MS M S VP WM contr ol syste m.Key W ords:P MS M;S VP WM;Three vect ors synthesizing flux;Si m ulati on收稿日期:2007211208修回日期:20082022280 引 言永磁同步电机(P MS M )因具有体积小、转矩大、效率高、控制简单和维护方便等优点,其应用领域不断扩大。
但由于各个领域对永磁同步电机的控制要求越来越高,既要考虑成本低廉、控制算法合理,又要兼顾控制性能好、开发周期短,因此如何建立有效的仿真模型越来越受到人们的关注[1210]。
1 S VP WM 控制算法S VP WM 控制算法的思想是:当三相交流对称正弦电压对电机供电时,交流电机在空间中产生圆形旋转磁场,从而产生恒定的电磁转矩。
若以交流电机中的理想磁链圆为基准圆,用逆变器不同的开关模式所产生的有效矢量来逼近基准圆,即用正多边形磁链近似圆形磁链,以形成旋转磁场,就可以达到控制电机的目的。
当三相逆变器(180°导通方式)对P MS M 供电时,定子电压由逆变器三组6个功率管的开关状态确定。
逆变器可以输出8个电压空间矢量,如图1。
其中,6个非零电压矢量按每区60°将磁链圆分成6个区间,每个矢量长度均等于2U dc /3。
(000)和(111)两个状态矢量为零矢量,其长度等于零。
本文采用三矢量合成磁通法来产生电压空间矢量。
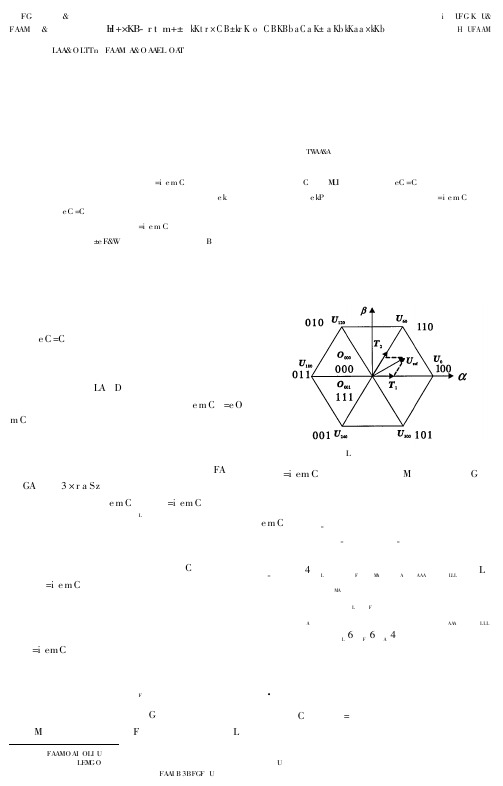
根据伏秒平衡原则,任意电压矢量U r 可以由相邻的两个电压矢量U x 、U y 及零矢量U 0(U 7)合成,如式(1)。
U 0T 0(U 7T 7)+U x T x +U y T y =U r T s(1)式中,T x 、T y 、T 0(T 7)分别为相邻矢量U x 、U y 和零矢量U 0(U 7)的作用时间;T s 为采样周期。
且:T s =T x +T y +T 0(T 7)(2)U x=U y =2U dc /3(3)永磁同步电机S VP WM 控制策略仿真研究 李 宏,等图1 S VP WM 向量、扇区、波形、矢量合成图如图1,以扇区Ⅴ为例,由三角形正弦定理可得:U rsin120°=T 3U 3T s sin (180°-θ)=T 4U 4T s sin (θ-120°)(4)把参考电压空间矢量U r 投影于转子两相静止坐标系α-β上,其投影分量U α、U β为:U α=U r cos θU β=U r sinθ(5)由式(2)、式(3)、式(4)和式(5)得到矢量U r 在扇区Ⅴ相邻矢量U 3、U 4和零矢量U 0(U 7)的作用时间T 3、T 4、T 0(T 7)为: T 3=3U β・T s /U dcT 4=-(3U α+3U β)・T s /2U dcT 0(T 7)=T s -(T 3+T 4)(6)随着参考电压空间矢量U r 的增加,输出电压的基电压幅值也线性增加,T 0逐渐减少,但应满足T x +T y ≤T s 及T 0>0,这样就可以保证波形无畸变,也决定了S VP WM 的最大输出限定。
为了实现S VP WM 信号,由图1可得到扇区Ⅴ的S VPWM 信号生成如图2所示。
图2 扇区Ⅴ内的S VP WM 信号生成图分析图2,可以得到矢量切换点T a 、T b 、T c 为:T a =(T s -T 3-T 4)/4T b =T a +T 3/2T c =T b +T 4/2(7)将矢量切换点T a 、T b 、T c 分别与三角波比较,经滞环比较器后可调制生成S VP WM 信号。
2 控制系统模型建立在永磁同步电机数学模型的基础上,提出建立永磁同步电机S VP WM 控制系统仿真模型的方法。
其系统设计框图如图3所示。
图3 永磁同步电机S VP WM 控制系统结构图永磁同步电机S VP WM 控制系统仿真建模采用双闭环控制方案。
转速环由转速P I 控制器组成,电流环由电流P I 控制器构成。
在系统中,经测量得到永磁同步电机三相定子电流i a 、i b 、i c ,经过坐标变换模块转换为实际直轴电流i d 和实际交轴电流i q 。
实际转速与给定转速比较后经过控制器得到参考交轴电流i q-ref 。
i d 、i q 分别和参考直轴电流i d -ref、参考交轴电流i q -ref比较后经过电流调节器生成直轴电压U d 和交轴电压U q ,再经过矢量控制模块、S VP WM 模块生成6路触发脉冲。
驱动逆变器模块生成三相电压,控制永磁同步电机运行。
下面主要介绍采用三矢量合成磁通法的S VP 2WM 模块。
其结构如图4。
该模块分别由6个子模块组成,以U α、U β和T s 作为输入,其中采样周期T s 已在子模块中以常量形式给定。
图4 S VP WM 模块结构图211 矢量所处扇区N 判断模块分析U α、U β的关系,得到参考电压空间矢量U r 所处扇区的计算公式如式(8)。
其变量N 与扇区的对应关系如表1。
其仿真模型如图5。
N =A +2B +4C ,A =sign (U β)B =sign[(3U α-U β)/2]B =sign[(3U α+U β)/2](8)图5 扇区判断模块结构图微电机2009年第42卷第1期表1 N 与扇区的对应关系N123456扇区ⅠⅡⅢⅣⅤⅥ212 变量X 、Y 、Z 计算模块为计算任意电压参考矢量U r 分别在6个扇区内的相邻矢量U x 、U y 的作用时间T x 、T y ,定义变量X 、Y 、Z ,为:X =3U β・T s /U dcY =(3U α+3U β)・T s /2U dc Z =(-3U α+3U β)・T s /2U dc(9)根据式(9)可建立仿真模型。
213 矢量作用时间T x 、T y 计算模块通过分析6组不同的T x 、T y ,得到N 与T x 、T y 的对应关系如表2。
表2 N 与T x 、T y 的对应关系N 123456T x Y -X -Z ZX-YT yZYX-X -Y -Z 按表2对T x 、T y 赋值后,还要对其进行饱和判断。
如式(10)。
(T x +T y >T s )T x =T x ・T s /(T x +T y )T y =T y ・T s /(T x +T y )(10)仿真模型如图6。
图6 T x 、T y 计算模块结构图214 矢量切换点T cm 1、T cm 2、T cm 3计算模块通过分析计算U r 分别在6个扇区内的矢量切换点,并结合图1中6个扇区内S VP WM 信号的生成图,得到N 与T cm1、T cm2、T cm3的对应关系。
如表3。
利用matlab 中的函数即可实现表3中的关系。
表3 N 与T c m1、T c m2、T c m3的对应关系N 123456T c m1T b T a T a T c T c T b T c m2T a T c T b T b T a T c T c m3T cT bT cT aT bT a215 S VP WM 输出模块将三角波与矢量的切换点比较,利用滞环控制实现S VP WM 信号。
当矢量的切换点与三角波进行比较时,若其差值大于滞环比较器所定义的滞环宽度,逆变器所对应的功率开关器件正向导通,负向关断;反之,若差值小于滞环宽度时,功率开关器件状态不变。
从而生成三相桥臂逆变器功率开关器件的6组控制信号。
如图7。
图7 S VP WM 输出模块结构图3 仿真结果根据上述建立的永磁同步电机S VP WM 控制系统的仿真模型,在Matlab615/Si m link 环境下进行仿真。