基于动调陀螺的多位置寻北仪的转位误差分析
寻北仪倾斜状态下转位误差分析
Tr ns OstO T tAnayssUnd rN o t e k rI lneSt t a p ii n E1O l i e rh S e e nc i a e
Xu i a , oXio o g Z o h o a eHa in Gu a sn , h uZ a f j
s e e a e n t e d n mi a l u e y o n r d c wo p sto y o no h s e e r i g p i c p e a e n t e e k r b s d o h y a c ly t n d g r .I to u e t o i n g r r e k r wo k n rn i l ,b s d o h i t
( o 2 2Sa o m, e o dA t l yE gn e igU iest, ’n7 0 2 , hn ) N . 0 tfR o S c n rie n ie r nvri Xi 1 0 5 C ia f lr n y a
Abs r c :Ai d a h r b e o h r s n o t o e e o m e t a d p o u to f t e n rh s e e g o e ta t me t t e p o l m f t e p e e t m s f d v l p n n r d c i n o h o t e k r i n r d p a tc l r r c s fta s o ii n t r t b e tl e r ra a y i n Ch n , r p s d t e sr p o a tt - o ii n n rh r cia wo k p o e so n p sto u n a l i r o n l s si i a p o o e h ta d wn f s wo p sto o t r t
基于光纤陀螺的捷联寻北仪误差分析_王丽芬
收稿日期:2010-12-29;收到修改稿日期:2011-03-07 作者简介:王丽芬(1982-),女(汉族),河北石家庄人。博士研究生,主要研究工作是惯性导航。E-mail: wanglifen_2009@。
第 38 卷第 5 期
王丽芬 等:基于光纤陀螺的捷联寻北仪误差分析
47
寻北仪采用的寻北方法主要有连续旋转和定点采样两种,其中定点采样方案以两位置和四位置寻北方 法居多。目前国内对两位置寻北方案的研究已基本成熟[1],在寻北方案、误差分析及补偿、工程样机研制
WANG Li-fen,XIE Ying,YANG Gong-liu,WANG Yan-yong
( School of Instrumentation Science and Opto-electronics Engineering, Beijing University of Aeronautics and Astronautics, Beijing 100191, China )
48
光电工程
2011 年 5 月
螺的输出为
⎧ω1 = Kg{cosϕ cosθωN + sinθωU +ηz cosγ sinϕωN +ηx cosγ cosθ sinϕωU + ω0 + ε fog (t1) +
⎪ ⎪
dψ [(cosγ sinϕ − sin γ cosϕ sinθ )ωN + sin γ cosθωU ]}
+ηz
cosϕ
cosθωN
+ηx
cos γ
cosθωU
+
ω0
+
ε fog (t4 )
+
基于DSP的动调陀螺寻北导航系统的设计及实现

基于DSP的动调陀螺寻北导航系统的设计及实现郑文成;颜俐;任勤勇;汪辉;周学文【摘要】研究的寻北导航系统主要以动力调谐陀螺为敏感设备,创新地采用TMS320VC5402芯片作为主处理器构建寻北仪的计算机系统,取代通常构建系统时所用的PC机或单片机,并以CPLD为主要控制辅助组件设计并调试数据的采集、处理、输出、信息通信等硬件电路和相关软件,充分利用DSP快速运算、信息存储、逻辑判断和数据处理等能力完成多种控制任务,在实现寻北功能的同时又使系统的精度、控制和解算能力得到提升.【期刊名称】《中国舰船研究》【年(卷),期】2010(005)001【总页数】5页(P76-80)【关键词】寻北导航系统;硬件;设计【作者】郑文成;颜俐;任勤勇;汪辉;周学文【作者单位】中国舰船研究设计中心,湖北,武汉,430064;中国舰船研究设计中心,湖北,武汉,430064;中国舰船研究设计中心,湖北,武汉,430064;中国舰船研究设计中心,湖北,武汉,430064;中国舰船研究设计中心,湖北,武汉,430064【正文语种】中文【中图分类】U666.1寻北技术是惯性技术领域的重要组成部分,是现代化战争中确保武器系统快速、精确打击目标的重要保障技术之一。
本文所研究的寻北装置主要以动力调谐陀螺为敏感设备,利用陀螺敏感地球自转角速度分量,并由此计算出载体纵轴向与真北的夹角。
本文设计的硬件电路根据两个加速度计和陀螺的输出经过A/D转换,计算出载体的姿态角,从而实施寻北。
随着惯性技术的发展,以陀螺仪为主要元件的寻北仪的精度、反应速度都在不断提高,PC机和单片机的运算速度、字长和量化误差等方面的缺陷影响了其在高精度控制系统中的应用效果,从而就对构成陀螺寻北系统的处理功能单元提出了更高的要求。
16位字长的高速DSP芯片的出现极大地缓解了这个问题。
在系统中采用基于DSP的数字控制系统取代PC机和单片机处理系统,可以充分利用DSP快速的运算、信息存储、逻辑判断和数据处理等能力完成多种控制任务,从而使控制能力达到一个新的水平。
光纤陀螺寻北仪多位置寻北误差分析

在 陀螺 寻 北 仪 中 , 在 着 惯 性 器 件 误 差 、 装 存 安 误差、 物理 参数 误差 以及环 境温 度 变化 、 载体 振 动等 影 响 。这 些误 差 的来 源 和 作 用 机 理 各 不 相 同 , 寻 对 北 结 果 的影响 也 不 同 ,但 有 一共 同 点 , 即他 们 所 产
误差 的原因 , 并提 出了减 小多位置寻北误差 的方 法 。最后 , F 在 OG寻 北仪 中进行 了实 验 , 验证 明了理 论分析 的 实
正确 性 和 所 采 用 的 方 法 的有 效 性 。
关 键 词 : 纤 陀 螺 ; 纤 陀 螺 寻 北 仪 ; 位 置 寻 北 误 差 光 光 多
( to i En ie r g, d a c n ie r gC l g ,S ia h a g0 0 0 ,C i a lc rnc gn ei n Or n n eE gn e i o l e hj z u n 5 0 3 hn ; n e i 2 c o l fI sr me tS in e& Opo lcr ncE gn e ig e ig Unv ri f r n uisa d As rn u is e ig 1 0 8 , hn ) .S h o o n tu n ce c tee to i n ie r ,B i n ie s yo o a t n t a t ,B in 0 0 3 C i a n j t Ae c o c j Ab ta t s r c :Th r o d l f F e e r r mo es o OG o t — e k r a d F n r h s e e n OG r o n e . Th n l e c s o a ef u d d e i f n e f FOG i s u b a ,F OG d i ,a c lr me e i s h h n e o h a t eo i n a t g e i f e t zm u h o h OG n r t c ee o t r ba ,t e c a g f t e e rh v l ct a d e r h ma n t i d wi a i t n t e F f y c l h ad F OG o t — e k ra e a a y e . Th e s n h t p o u e mu t p st n n r h s e i g e r ra d t e me h d h t n rh s e e r n l z d e ra o st a r d c l— o io o t—e kn ro n h t o s ta i i
光纤陀螺仪误差分析与补偿
光纤陀螺仪误差分析与补偿光纤陀螺仪是一种利用光纤的干涉原理测量角速度的装置,广泛应用于惯性导航、航天航空、舰船导航等领域。
然而,光纤陀螺仪由于受到多种因素的影响,其测量结果可能存在误差。
因此,对光纤陀螺仪的误差进行分析与补偿非常重要。
首先,零偏误差是光纤陀螺仪测量出的角速度与真实角速度之间的差距。
这是由于光纤陀螺仪的初始偏置或输出电压的漂移引起的。
为了补偿零偏误差,通常采用零偏校正技术,即在测量过程中利用稳定的参考源进行校正,使得零偏误差尽可能地减小。
其次,尺度因数误差是指光纤陀螺仪输出的角速度与输入的真实角速度之间的比例误差。
这种误差可能是由于光纤陀螺仪内部元件的尺寸、形状不一致或干涉输出的非线性引起的。
为了补偿尺度因数误差,可以通过标定和校正技术来精确测量和调整光纤陀螺仪的尺度因数,使得测量结果更加准确。
此外,光纤陀螺仪的寿命误差是指其输出在使用一段时间后的漂移误差。
这种漂移可能是由于光纤陀螺仪内部元件的老化、磨损或热膨胀引起的。
为了补偿寿命误差,可以采用自适应滤波技术和故障检测技术,通过与历史数据的比较和分析,实时调整光纤陀螺仪的输出,以减小误差。
最后,光纤陀螺仪的温度误差是由于环境温度变化引起的。
温度变化会导致光纤陀螺仪内部元件的物理性质发生变化,进而影响测量结果的准确性。
为了补偿温度误差,可以在设计过程中采用温度补偿电路,通过测量环境温度,并根据温度-误差曲线对输出信号进行补偿,以提高光纤陀螺仪的稳定性和精度。
综上所述,光纤陀螺仪误差的分析与补偿对于提高其测量精度和可靠性至关重要。
通过对各种误差源的理解和分析,可以采取相应的校正和补偿措施,实现准确、稳定的角速度测量。
在实际应用中,还需要考虑误差的累积效应和系统的实时性要求,以确保光纤陀螺仪的性能达到设计要求。
陀螺仪论文-陀螺经纬仪定向的误差分析及导线平差

陀螺经纬仪定向的误差分析及导线平差摘 要:井下经纬仪导线通常是由井底车场开始的向井田边界推进的,根据误差累计原理,导线点位的误差离井底车场越远误差越大。
利用陀螺经纬仪定向时,对其进行误差分析及平差,能有效地控制误差,并提供最优定向法!关键词:陀螺经纬仪;定向误差;导线平差1 陀螺经纬仪定向的精度平定陀螺经纬仪的定向精度主要以陀螺方位角一次测定中误差m T 和一次定向中误差m α表示。
1.1 陀螺方位角一次测定中误差在待定边进行陀螺定向前,陀螺仪需在地面已知坐标方位角边上 测定仪器常数△。
按《煤矿测量规程》规定,前后共需测4~6次,这样就可按白赛尔公式求算陀螺方位角一次测定中误差,即仪器常数一次测定中误差(简称一次测定中误差)为:[]1vv n ±∆- 式中 v i —仪器常数的平均值与各次仪器常数的差值;n △—测定仪器常数的次数。
则测定仪器常数平均值的中误差为:m △平= m T 平=mT n ±∆1.2 一次定向中误差一次定向中误差可按下式计算:式中 —仪器常数平均中误差; —待定边陀螺方位角平均值中误差;m α= 222·m m T m λ∆±平+平+—确定子午线收敛角的中误差。
因确定子午线收敛角的误差m γ较小,可以忽略不计,故上式可写为:m α= 22·m T m ∆±平+平 2 陀螺经纬仪一次测定方位角的中误差分析如前所述,陀螺经纬仪的测量精度,以陀螺方位角一次测定中误差表示。
不同的定向方法,其误差来源也有差异。
目前国内最常用的是跟踪逆转点法和中天法,其中所用的一些数据是根据具体的仪器试验分析所得,有一定得局限性,但对掌握误差分析方法而言,却是无关紧要的。
2.1 跟踪逆转点法定向时的误差分析以JT 15型陀螺经纬仪为例进行探讨。
按跟踪逆转点法进行陀螺定向时,主要误差来源有:①经纬仪测定方向的误差;②上架式陀螺仪与经纬仪的连接误差;③悬挂带零位变动误差;④灵敏部摆动平衡位置的变动误差;⑤外界条件,如风流、气温及震动等因素的影响。
基于动调陀螺的多位置捷联寻北仪研制

2 .Co e eo mm u ia o gn e ig,J i iv ri l g fCo nc t n En ie rn i l fn Un e t s y,Ch g h n 1 0 2 n a c u 3 0 5,Ch n ; i a
3 h n c u nt ueo t s Fn c a i n h s , hn cd myo i e C a g h n1 03 , hn ) .C a gh n Is tt f i , ieMeh nc a dP yi C iaA a e f c n , h cu 3 0 3 C ia i Op c s s c se i n
1 02 ; 3 0 5
10 3 ) 30 3
( .大连 民族学院机电信息工程学院 , 1 辽宁大连
160 ;.吉 林大 学通信工程学院 , 16 0 2 吉林长春
3 中 国 科 学 院 长 春 光 学 精 密 机 械 与 物 理 研 究所 , 林 长 春 . 吉
摘 要 : 了提 高 大 型 光 电跟 踪 设备 和 惯 性 导航 设 备 自主 定 向 的性 能 , 据 动 调 陀螺 的工 作 原 理 , 计 了一 种 多 位 置 捷 为 根 设
联寻北仪 。针 对 多位置捷联寻北 系统 的数 学模 型, 采用改进的最 小二乘拟合 算法 , 弦曲线进行参数估计 , 算 出北 向 对正 解
基于旋转调制技术的自动陀螺寻北仪方案设计
掘等 方位测 量等 民用 领域 中必 要 的测 量 手段 。 寻 北 仪 目前 普 遍 采 用 多 位 置 寻 北 法 …, 即 在
0 ~3 0 。 6 。范 围 内的等 间隔 的位 置 上采 样 陀 螺仪 的 输 出数 据 ,进 行 方位 角 解 算 的方 法 。它 在 一 定程 度
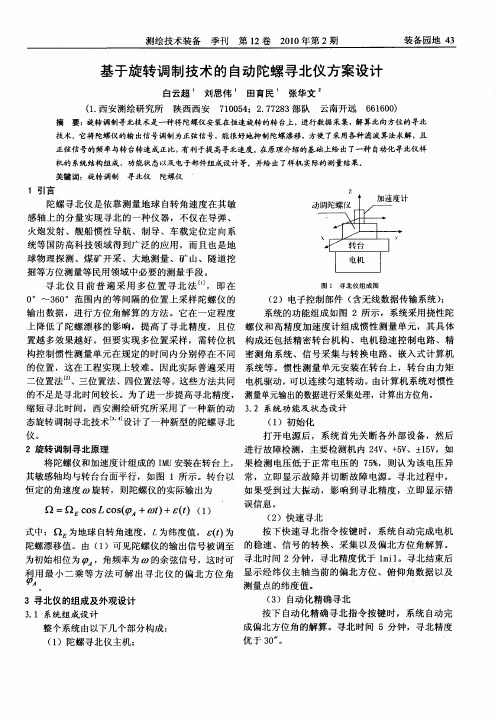
图 1 寻 北 仪 组 成 图
o
3寻 北仪 的组成 及 外观设 计
3 1 系统组 成设 计 .
( ) 自动化 精 确寻 北 3
按 下 自动化 精 确 寻 北指 令 按键 时 ,系 统 自动 完 成偏 北 方位 角 的解算 。寻 北 时 间 5 分钟 ,寻 北精度
优 于 3 O。
整个 系统 由 以下 几个 部分 构成 :
要 : 转调 制寻 北技 术是 一种将 陀螺仪安装在 恒速旋转 的转 台上 ,进行数据采集,解 算北向 方位 的寻北 旋
技术 它将 陀螺仪的输 出信号调制为正弦信 号,能很好地抑制 陀螺漂移 ,方便 了采用各种滤 波算 法求解 ,且 正弦信号的频率与转台转速 成正比, 利于提 高寻北速度 。 有 在原理介 绍的基础上给 出了一种 自动化寻北仪样
误信 息 。 ( )快速 寻 北 2
Q =Q C S o ( f+c t ( ) O Lc se + ) () 1
式中:Q 为地球 自转角速度 ,£为纬度值 , ( 为 f )
按 下 快 速 寻 北指 令 按 键 时 ,系 统 自动 完 成 电机
陀螺漂 移值 。 由 ( )可 见 陀螺仪 的输 出信 号被 调至 的稳 速 、信 号 的转 换 、采 集 以及 偏 北 方位 角 解算 。 1 m1 为初始 相位 为 ,角频 率为 C O的余 弦信 号 ,这 时可 寻北 时 间 2分钟 ,寻 北精 度优 于 l i 。寻 北结束 后 用 最 小 二 乘 等 方 法 可 解 出 寻 北 仪 的 偏 北 方 位 角 显 示 经 纬 仪主 轴 当前 的偏 北方 位 、俯仰 角 数据 以及 测 量 点的 纬度值 。
陀螺寻北仪原理(精度影响因素及技术参数)

式(18)
式(17)
0.6 0.4 0.2 0 -0.2 0 -0.4 -0.6
误差/度
60
120
180
240
300
360
方位角/度
图8
仿真条件:纬度为 20 度; 在两个采样周期(3 分钟)内的陀螺 x 轴漂移为+0.05,y 轴漂移+0.05; 俯仰角和横滚角分别为 5; 仿真结果见图 9
225
270
315
360
图6 3.3 纬度误差对寻北精度的影响 仿真条件:纬度为 40 度; 纬度误差为:0.1 俯仰角和横滚角分别为 5; 计算公式(17)式。
北京七维航测科技股份有限公司 地址:海淀区西北旺镇永捷南路 2 号院 2 号楼
北京七维航测科技股份有限公司
Beijing SDi Science&Technology Co.,Ltd.
附录:寻北仪主程序框图 GPS 加电
查询导航计算机
发送 GPS 数据 N
Y
寻 北 仪 加
接收 GPS 数据
给陀螺和加速度计发出启动指令
寻北仪自检
接收导航计算机初始参数
接收 GPS 数据 N 寻北开始? Y
北京七维航测科技股份有限公司 地址:海淀区西北旺镇永捷南路 2 号院 2 号楼
北京七维航测科技股份有限公司
北京七维航测科技股份有限公司 地址:海淀区西北旺镇永捷南路 2 号院 2 号楼
北京七维航测科技股份有限公司
Beijing SDi Science&Technology Co.,Ltd.
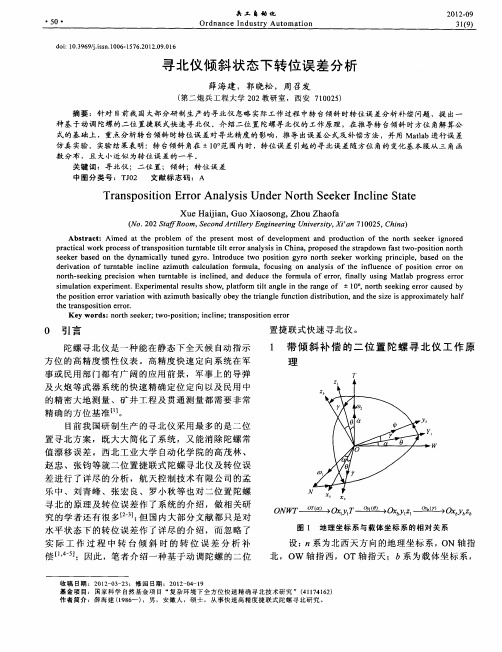
地理坐标系: 取东为 Xg 轴的正方向, 北为 Y g 轴的正方向, 铅垂轴向上为 Z 轴的正方向, 原点为寻北仪的质心。 陀螺和加速度计的安装方式见图 1 和图 2
寻北仪原理及典型指标参数

寻北仪原理简介和分类寻北仪是罗盘的一种,是用来寻找某一位置的真北方向值。
陀螺寻北仪又称陀螺罗盘,是利用陀螺原理测定地球自转角速率在当地水平面投影方向(即真北方位)的一种惯性测量系统。
它的寻北过程无需外部参考。
除受高纬度限制之外,它的寻北测量不受天气、昼夜时间、地磁场和场地通视条件的影响。
陀螺寻北仪是一种精密惯性测量仪器,通常用于为火炮、地对地导弹和地面雷达等机动武器系统提供方位参考。
根据所用陀螺类型,陀螺寻北仪可分为以下三种:◆以二自由度陀螺作为地球自转敏感器的寻北仪(如悬挂摆式陀螺寻北仪)◆以单轴速率陀螺作为敏感器的寻北仪(如捷联式陀螺寻北仪,高精度,例SDI-151)◆平台寻北系统陀螺寻北仪对环境的振动干扰(特别是对低频振动干扰)极为敏感。
根据使用环境,陀螺寻北仪可分为地面架设的高精度寻北仪、车载陀螺寻北仪和船用动基座陀螺寻北仪三种。
工作原理陀螺寻北仪原理陀螺仪是一种机械转动部件的惯性测量元件,具有耐冲击、灵敏度高、寿命长、功耗低、集成可靠等优点,是新一代捷联式惯性导航系统中理想的惯性器件。
在基于陀螺的寻北应用中,采用的大多数方法是FOG转动固定角度,通过确定偏移量计算相对北方向的夹角。
为了精确指北,还必须消除FOG的漂移。
一般使用一个旋转平台如图1所示,将陀螺置于动基座上,动基座平面平行于水平面,陀螺的敏感轴平行于动基座平面。
开始寻北时,陀螺处于位置1,陀螺敏感轴与载体平行。
假设陀螺敏感轴的初始方向与真北方向的夹角为。
陀螺在位置1 的输出值为;然后转动基座90°,在2位置测得陀螺的输出值为。
依次再转动两次90°,分别转到3和4的位置,得到角速度和。
图 1. 陀螺寻北示意图图 2. 地球自转在陀螺敏感轴上的投影假设测量点的纬度为,地球自转为,则1位置测得的角速度为:其中,为陀螺输出的零点漂移。
同理可得:在短时间内,假设陀螺的漂移为一常量,即:, 则用此方法测量,可以消除陀螺的零偏,也不需要知道测量地点的纬度值。
挠性寻北仪调试中的误差分析及补偿方案
挠性寻北仪调试中的误差分析及补偿方案作者:胡小兵来源:《科学与财富》2018年第36期摘要:挠性寻北仪是一种高精度的定向仪器,主要用来对雷达天线、军用车辆、坦克、自行火炮以及单兵作战系统等,自主提供方位信息。
这种仪器能够适应多种环境,并能在静态下自动标定出载体的方位,是一种自主式的定向设备。
在实际应用过程中,相关人员只需按照特定的通讯协议来控制寻北仪,寻北仪将给出其基准边与真北零的真实偏差角,从而为载体提供必要的方位指示。
基于此,我们就特别有必要在调试过程中去探究寻北误差以及解决措施,也就是寻北仪的误差分析及补偿方案。
关键词:挠性寻北仪;误差分析;补偿方案引言寻北仪主要是利用陀螺仪原理,对地球自转角速率在正北方向的惯性进行测量。
挠性寻北仪技术目前已经相当成熟,与其他方式的寻北仪相比,这种寻北仪具有检测精度高、体积小、成本低等诸多优点,所以这种设备也被广泛应用于各个领域。
1、寻北原理因为挠性寻北仪的动力调谐陀螺和石英加速度计的分别敏感性主要是地球自转角速度在陀螺轴上的分量和重力加速度矢量在加速度计敏感轴上的分量,所以有必要首先介绍一下几种坐标系。
坐标系介绍。
如图1所示,该图显示的是地球坐标系,坐标系的原点就是地球的中心O,X轴与Y轴位于赤道平面内,X轴指向格林尼治经线(0度经线),Y轴指向90度经线,而Z 轴与地球的自转轴平行,这三个坐标轴满足右手定则,所以地球坐标系会以地球自转角速度相对于惯性坐标系进行运动。
如图1所示,地理坐标系,该系的原点在载体的质心,X轴与Y轴在当地的水平面内,X 轴与正东方向重合,Y轴与正北方向重合,Z轴沿着地垂线指向天,因此地理坐标系也叫东北天坐标系,有的资料也叫西北天坐标系等,主要是取的方向不一样,原理上都是相同的,三个坐标轴都符合右手定则。
除了以上讲述的二种坐标系之外,相关工作还需要明确载体坐标系和陀螺坐标系。
载体坐标系的原点就是寻北仪载体的重心,载体的纵轴方向是Y轴,右侧为X轴,Z轴分别于X、Y 轴垂直,并且构成满足右手定则的坐标系。
惯性导航技术中的陀螺仪原理与误差补偿

惯性导航技术中的陀螺仪原理与误差补偿惯性导航技术是一种常见的导航方式,它通过测量物体在空间中的加速度和角速度,从而确定物体的位置和方向。
在惯性导航中,陀螺仪是一个关键的设备,用于测量物体的角速度。
本文将探讨陀螺仪的原理以及在惯性导航中的误差补偿。
陀螺仪是一种利用物体的陀螺效应进行测量的仪器。
陀螺效应是指在物体自转时会出现的一种现象,这种现象可以借助陀螺仪进行测量。
陀螺仪通常由一个旋转的转子和感测器组成,转子的旋转轴与物体的旋转轴平行。
当转子自身旋转时,会产生一个稳定的旋转轴,这个旋转轴可以用来测量物体的角速度。
陀螺仪工作的原理很简单。
当物体发生旋转时,陀螺仪感测到的角速度与物体旋转的角速度相同。
这是因为陀螺仪中的旋转转子会受到物体的角速度的影响而产生偏转,感测器则会测量到这个偏转的角速度。
通过测量这个角速度,可以确定物体的旋转方向和角速度大小。
然而,陀螺仪在实际使用中存在着一些误差。
其中最主要的误差是漂移误差。
漂移误差是指在没有旋转的情况下,陀螺仪仍然会测量到一个非零的角速度。
这种误差是由于陀螺仪内部的一些因素导致的,比如传感器的非线性、噪声和温度变化等。
漂移误差会导致惯性导航系统的误差累积,进而影响到导航的准确性。
为了解决陀螺仪误差的问题,研究人员提出了一系列的误差补偿方法。
其中一种常用的方法是基于卡尔曼滤波算法的误差补偿。
卡尔曼滤波算法是一种利用状态估计的方法来预测和校正误差的算法。
在陀螺仪误差补偿中,卡尔曼滤波算法可以利用惯性测量单元(IMU)的其他传感器数据,比如加速度计和磁力计的数据,来对陀螺仪的测量结果进行校正。
另一种常见的陀螺仪误差补偿方法是基于零偏校正。
零偏是陀螺仪中的一种系统误差,它会导致测量结果的偏离真实值。
通过对陀螺仪进行定期的零偏校正,可以使陀螺仪的测量结果更加准确。
零偏校正可以通过多种方式进行,比如利用静态校准和动态校准方法。
静态校准是在不进行运动的情况下校正陀螺仪,而动态校准则是在物体运动时进行校正。
光纤陀螺寻北仪航向效应误差分析和补偿
Ke wo d : b ro t y o c p ;f u - o iin;n r h s e e ;q a r n itn t n e d n fe t y r s f e - p i g r s o e o rp sto i c o t - e k r u d a td si c i ;h a ig e f c o
c 【 J
柚 E 。o ∞ sn ] 6 ] r— o cs 。ig ( )
其中 。 为地球 自转 角 速度 , 当地 的地理纬度 。 为 从 O Y z 变换到 0 。33 , X。 。 o X l y 后 陀螺 仪所 能 敏 Z 感到 的地球 自转 角 速度 分量 为 :
各轴 上 的分量 可表 示 为 :
其中 、 、 、 分别为 F z OG在 4个位 置 的输 出 。
由于使用 条件 的要 求或 机械 安 装 的原 因 , 时 寻 有 北 仪工作 时 陀螺 的敏感轴 不 一定 处 于水 平 面 内 , 寻 给
北带来一 定 的困难 。
∞ o一 [ 叫
寻北方 案 , 并分析 了各种误 差源 的 影响 。但 寻北仪 的 初始方位角 与寻北精度 的关 系并 未被 研究 过 , 而在 实
际寻北过程 中 , 某些特 殊 的初 始方 位 角上 的寻 北精 度 会 大大下 降 , 种 现象 称 为 寻 北 仪 的航 向效应 , 向 这 航
1 光 纤 陀螺 仪 倾 斜 寻北 原 理
重合 。 载体 坐标 系 可 以
看 成 由地 理 坐 标 系 经 3
陀螺经纬仪精密定向及误差分析论文

8摘要陀螺经纬仪是一种将陀螺仪和经纬仪结合成为一体的、全天候,并且不依赖于其他条件就能测定真北方向的精密定向仪器,有着广泛的应用。
随着科学和技术、工程建设与经济建设的快速发展,对陀螺经纬仪定向精度要求越来越高,而国内外在高精度陀螺经纬仪定向精度方面的研究较少,尤其是在陀螺经纬仪定向精度评定规范以及外界因素对陀螺经纬仪定向精度的影响方面的研究成果欠缺。
因此,本文探讨了陀螺经纬仪定向精度的有关问题。
本论文主要研究情况如下:首先,对于陀螺经纬仪的具体构造和陀螺经纬仪的具体工作原理做出了相应的理论分析。
详细阐述了陀螺仪的结构和功能以及陀螺经纬仪的定向原理。
其次,在相应的理论指导之下,详细的介绍了几种具体的测量方法。
分别根据陀螺仪经纬仪的跟踪和不跟踪两种情况来具体来进行数据的获取和处理。
在不跟踪状态下对中天法、时差法以及三点法等进行具体的理论分析和实际操作。
最后,在对中天法和逆转点法两种工作方式做理论上的分析。
在定向精度和误差等具体环节上分析,得出比较适合应用的数据获取方法,也就所谓的观测方法。
关键字:陀螺经纬仪,结构和功能,定向原理,观测方法,误差分析AbstractThe theodolite is a gyro and theodolite combined into one , all-weather , and does not depend on other conditions can be measured precision orientation apparatus to true north , has a wide range of applications .With the rapid development of science and technology, engineering, construction and economic construction , the directional accuracy of the theodolite have become increasingly demanding , and less at home and abroad in high-precision gyro theodolite directional accuracy , especially in the directional gyro theodolite accuracy assessment lack of research results of the specification and the impact of external factors on the directional gyro theodolite accuracy . Therefore, this article discusses the issues related to directional accuracy of the theodolite . This thesis is as follows : First, for the specific structure of the gyro theodolite and gyro theodolite works to make the theoretical analysis . Elaborated on the structure and function of the gyroscopes and orientation principle .Second, under the theoretical guidance , described in detail several specific methods of measurement . Gyro theodolite tracking and not tracking the two situations specific to the data acquisition and processing , respectively . For example, in the state does not track the transit method, difference method , and three-point method of theoretical analysis and practical .Finally, the theoretical analysis of the two methods of work of the transit law and reverse the point method . Directional accuracy and error analysis of the specific areas of analysis, to draw more suitable for data acquisition applications , there is theso-called methods of observation .Keywords: Theodolite , the structure and function , directional principle , observation method , error analysis目录目录摘要 (I)Abstract (II)目录 (II)第一章绪论................................................................................................................................ - 1 -1.1本课题研究的背景及意义........................................................................................... - 1 -1.2陀螺经纬仪精密定向的研究现状及发展趋势........................................................... - 2 - 第二章陀螺经纬仪的构成........................................................................................................ - 4 -2.1陀螺经纬仪的分类....................................................................................................... - 4 -2.2 陀螺经纬仪结构组成.................................................................................................. - 4 -2.2.1 灵敏部.............................................................................................................. - 5 -2.2.2 光学观测系统.................................................................................................. - 5 -2.2.3 紧锁限幅结构.................................................................................................. - 7 -2.2.4 机体外壳.......................................................................................................... - 7 - 第三章陀螺经纬仪精密定向原理............................................................................................ - 8 -3.1 陀螺仪简介.................................................................................................................. - 8 -3.1.1 陀螺仪的基本特征(陀螺仪的进动性和定轴性)...................................... - 8 -3.1.2 陀螺仪转动的微分方程................................................................................ - 10 -3.1.3 摆式陀螺仪的运动方程................................................................................ - 10 -3.2 陀螺经纬仪定向观测方程........................................................................................ - 13 -3.2.1 陀螺轴的自由摆动方程................................................................................ - 14 -3.2.2 跟踪状态下陀螺轴的摆动方程.................................................................... - 15 -3.2.3 经纬仪照准部固定状态下陀螺轴的摆动方程............................................ - 16 - 第四章陀螺经纬仪定向实验.................................................................................................. - 19 -4.1逆转点法数据获取及数据处理方法......................................................................... - 19 -4.1.1逆转点法数据获取(陀螺经纬仪的操作步骤)......................................... - 19 -4.1.2 逆转点法数据处理方法................................................................................ - 20 -4.2 中天法的数据获取以及数据处理方法.................................................................... - 21 -4.2.1 中天法的数据获取(陀螺经纬仪的操作步骤)........................................ - 21 -4.2.2 中天法数据处理方法.................................................................................... - 22 -4.3 具体数据获取处理.................................................................................................... - 25 -4.4 总结不跟踪式观测的几种简易方案........................................................................ - 30 -4.4.1 中天法............................................................................................................ - 33 -4.4.2 时差法............................................................................................................ - 35 -4.4.3 改化振幅法.................................................................................................... - 36 -4.4.4 三点快速法.................................................................................................... - 37 - 第五章陀螺经纬仪定向方法的精度分析.............................................................................. - 39 -5.1 影响陀螺经纬仪定向精度的各种因素.................................................................... - 39 -5.2 陀螺经纬仪精密定向中误差来源分析................................................................ - 40 - 第六章陀螺经纬仪定向方法对比分析结论.......................................................................... - 41 - 参考文献.................................................................................................................................... - 43 - 致谢及声明................................................................................................................................ - 44 -第一章绪论1.1本课题研究的背景及意义陀螺经纬仪是一种将陀螺仪和经纬仪结合成一体的、并且不依赖其他条件能够测定真北方位的精密物理定向仪器,广泛应用于测绘工作中,特别是矿山、隧道、海洋、森林和军事等隐秘地区的定向测量和快速测量,解决了传统定向方法精度低、工作量大及定向时间长等缺点。
基于振动陀螺的动态零位校准及其误差补偿
收稿日期:2007211206 基金项目:重庆市科委自然科学基金资助项目(CST G2007BB2448,CST G2007BB4385);重庆邮电大学博士启动基金资助项目(A2007245) 作者简介:刘宇(19722),男,重庆人,博士,主要研究方向为惯性导航及信号处理。
文章编号:100422474(2008)0620671203基于振动陀螺的动态零位校准及其误差补偿刘 宇1,2,刘 俊1,黎蕾蕾2,孙燕彬1,李秋俊1(1.重庆邮电大学光电工程学院,重庆400065;2.重庆大学光电技术及系统教育部重点实验室,重庆400044) 摘 要:根据固态振动陀螺输出信号和噪声特点对其构成的低成本惯性测量单元(IMU )的原始传感信号进行了快速小波滤波和灰色理论建模处理。
运用累加生成操作(A GO )方法得到有规则的单值对应非线性函数,并获得陀螺零位输出在三维空间中的单值映射模型。
以时间和温度为输入,根据灰色神经网络建立陀螺的漂移模型,对累加生成方法生成的单值对应非线性函数进行逼近,从而提高了动态测量精度。
同时采用活动阈值融合算法,优化陀螺和加速度计动态测量数据。
实验证明,上述方法和算法有效提高了系统测量精度。
关键词:陀螺;惯性测量单元(IMU );滤波;数据融合中图分类号:V241 文献标识码:ADynamic Zero Output Adjustment and System Error Compensation B ased onLow Cost Vibration G yroL IU Yu 1,2,L IU Jun 1,L I Lei 2lei 2,SUN Yan 2bin 1,L I Q iu 2jun 1(1.College of Optoelectronics Engineering ,Chongqing University of Post s and Telecommunications ,Chongqing 400065,China ;2.College of Optoelect ronics Engineering ,Chongqing University ,Chongqing 400044,China ) Abstract :The sensor signal filtered through fast wavelet and compensated by Grey model was proposed accord 2ing to the characteristics of signal and noise output.Grey accumulate operation (A GO )was adopted to achieve the regularly single 2mapping f unction and the model of single 2mapping of gyro’s zero output in three dimension coordi 2nates.The model based on the Grey neural network approximated the f unction of created by the A GO algorithm and improved the measurement accuracy of IMU.At the same time ,the active threshold based on the f usion algorithm was used to optimize the measurement datum of gyro and accelerometer.Experiments proved these method and algo 2rithm increased the system ’s accuracy successf ully.K ey w ords :gyro ;inertial measurement unit (IMU );filter ;data f usion 在飞行器低速运动或俯仰和横滚方向改变时,陀螺的模拟输出实际是围绕静态零位点的正负变化曲线。
基于陀螺全站仪的三轴惯性测试转台寻北方案及实验_孙伟
实验精密导线边 G54 G24 的地理方位角 为 A0 ,在 G54 点安置陀螺全站仪,通过陀螺运转和观测求 出 G54 G24 边的陀螺方位角 at ,利用式( 1) 完成仪器常数 Δ 的求取:
Δ = A0 - at
( 1)
式中: 根 据 地 面 精 密 导 线 边 G54 G24 求 取 的 坐 标 方 位 角
收稿日期: 2014-03 Received Date: 2014-03 * 基金项目: 国家自然科学基金( 41304032) 、高等学校博士学科点专项科研基金( 新教师类) ( 20132121120005) 、辽宁省科技厅博士启动基金 ( 20121084) 、测绘遥感信息工程国家重点实验室资助项目( 12P01) 、第三批应用创新型人才培养立项课题( YB130207) 资助项目
第7 期
孙 伟 等: 基于陀螺全站仪的三轴惯性测试转台寻北方案及实验
1477
度及自动化方 面,都 居 于 世 界 领 先 水 平,AEROSMITH 已成为国际标榜。由于转台 具 有 特 殊 的 军 事、太 空 等 应用需求,国外对我国实行 了 严 格 的 禁 运。 我 国 的 转 台研制虽然比发达国家起步 晚,但 这 些 年 来 也 取 得 了 长足的进 步。 从 1965 年 开 始,我 国 转 台 的 研 制 工 作 经历了 单 轴、双 轴 阶 段,发 展 为 近 年 来 的 三 轴 转 台。 1966 年,707 所的单轴伺服台 DT-1 型进入 研 制 阶 段; 1975 年,303 所 研 制 成 功 了 SFT-1 . 1 型 伺 服 台; 1979 年,哈工大与 6354 所 及 441 厂 合 作 研 制 了 我 国 第 一 台双轴伺 服 转 台; 1983 年,航 天 部 一 院 13 所 研 制 的 SSFT 型双轴伺 服 台 是 我 国 最 大 的 双 轴 伺 服 台; 1987 年,哈工大与 6354 所 共 同 承 担 了 计 算 机 控 制 双 轴 转 台即 CCGT 的 研 制 任 务; 1990 年,303 所 研 制 成 功 了 SGT-1 型三轴捷联惯导测试转台等[14-17]。
基于FFT的陀螺寻北仪误差补偿
基于FFT的陀螺寻北仪误差补偿
王海明;张卫侠;李四海
【期刊名称】《传感器与微系统》
【年(卷),期】2014(33)2
【摘要】传统提高陀螺寻北仪精度的方法主要是选用高精度陀螺、提高转位精度、增加转位数、通过数字滤波消除外界干扰等,这些方法大多针对寻北仪的某方面误
差因素进行改进,而对寻北仪整体的误差特性研究较少.通过对陀螺寻北仪综合误差特性的分析,提出了基于快速傅立叶变换(FFT)的寻北仪误差补偿方法.该方法首先测量出寻北仪的整周误差,然后通过求取FFT系数完成对寻北仪的系统级误差补偿,该方法尤其对寻北仪制造过程中的结构误差和测量元件的常值漂移残差具有良好的补偿效果.经产品验证可以在保持现有陀螺和转位精度不变的情况下,提高寻北精度3
倍以上,具有良好的工程实用价值.
【总页数】3页(P32-34)
【作者】王海明;张卫侠;李四海
【作者单位】陕西华燕航空仪表有限公司,陕西汉中723102;陕西飞机工业(集团)有限公司飞机设计研究院,陕西汉中723102;西北工业大学自动化学院,陕西西安710129
【正文语种】中文
【中图分类】TP277
【相关文献】
1.基于光纤陀螺的捷联寻北仪误差分析 [J], 王丽芬;谢英;杨功流;王艳永
2.基于DSP及FPDA的旋转调制式陀螺寻北仪的研制 [J], 白云超;蒋庆仙;刘思伟
3.基于自主定位定向原理的陀螺仪寻北技术 [J], 杨骏;封海洋;赵雪;孙海鹰;郭霁;范维
4.基于自主定位定向原理的陀螺仪寻北技术 [J], 杨骏;封海洋;赵雪;孙海鹰;郭霁;范维
5.基于光纤陀螺寻北仪转位系统的模糊免疫自适应PID控制 [J], 甄凡凡;李邓化;段苛苛
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要 :针对 实验 过程 中转 台在每个转位处存在的转位误 差对 系统寻北精度的影响,介绍 了动调 陀螺多位置寻北仪 的工作 过程及真 北解 算原理 ,进行 了转位误 差对寻 北精度影响的误差分析。运 用误 差理论和偏导数原理 ,推导 出
转位误差与寻北误差二者之 间的关 系模型。理论分析及 实验结果表 明,在相 同寻北位 置数 的情 况下,转位误差越
2 C ag h n ntue fO tsFn c a i n hs s C S C ag h n10 3 , hn ; . h n c u s tto pi , ie I i c Meh nc adP yi , A , h n c u 3 0 3 C i s c a 3 C l g o u iai n ier g Jl nvri , h n cu 3 0 5 C ia . ol efC mm nct nE gnei , inU iesy C a g h n10 2 , hn ) e o o n i t
ma h mai a d lb t e n p st n e r ra d n a e k n ro sg  ̄ n t r u h e r rte r n a t l e v t e te t l c mo e e w e o i o ro n o h s e i g e r i o e o g ro o a d p r a r ai i h h y i di v p i cp e T e a ay e ft e r n e u t f x e me t h w a, n t e c n i o f h a o t — e k n on s r i l. h n l s so o y a d r s l o p r n o t t i o d t n o e s me n rh s e i g p i t, n h s e i s h h i t
a i t r h t r n r d c d a d t e r lt n b t e o i o r o n o t —e k n rc so sa a y e . e z mu h a i me i a e i to u e , n ea i ewe n p st n er ra d n r s e i g p e iin i n lz d Th t c h o i h
peio ,h r rcs fh n mi l u e yo( G mutp sinn a ekr n ep n i eo e rc i tewokpoes e sn o t Dy a c l T n dG r DT ) l-oio o hsee dt r cp fh ay i t a h i l t
XI - n ,T N Xu g a g ,WA E Muj A .u n u NG h.in' Z i a q
( .c o lf lc i l n E et nc n ier g C ag h nU i ri eh ooy C ag h n10 1, hn ; 1S ho E etc d l r iE gnei , h n c u nv sto c n l , h n c u 30 2 C i o r aa co n e y fT g a
基 于动调 陀螺 的多位置寻北仪 的转位 误差 分析
谢慕君 ,谭旭光 ,王志乾 2 ,
(. 1 长春工业大学 电气与 电子工程学院 ,长春 1 0 1 ; 3 0 2
2 .中国科学院长春光学精密机械与物理研究所 ,长春 10 3 ; 3 0 3
3 .吉林大学 通信工程学 院 ,长春 102 3 0 5)
Ab t a t n o d r t e u e t e i f e c fp st n e r r i v r tn s l p st n o r t b e o o h s e ig sr c :I r e o r d c h n u n e o o i o ro n e e y s d t l o i o ft n a l n n a —e k n l i a i- i u
t e l s o i o ro s t e h g e o t —e k n r c so s i h o d t n o e s me p s i n e o , h r h e s p st n e ri , h i h r n r s e i g p e ii n i ; n t e c n i o f t a o i o r r t e mo e i h i h t n rh s e i g p it a e h h g e o t — e k n r cso i.Ac o d n t t e t e r t a n l s s w o ro o — e k n o n s r ,t e ih r n r s e i g p e ii n s t h c r i g o h h o ei l a ay e ,t e r r c
第 3 卷第 1 期 5 1
20 0 8年 1 月 1
光 电ቤተ መጻሕፍቲ ባይዱ程
Op o— e to cEn ne rng t Elcr ni gi e i
Vo . 5 No 1 13 , . 1
N o , 00 v2 8
文章 编号 :1 0 — 0 X(0 81 — 0 4 0 0 3 5 1 2 0 )1 0 0 — 4
小寻北精度越 高;同时在一定 的转位误差时 ,寻北位置数越 多则寻 北精度越 高。根据理论分析 ,提 出了两种不 同
的 误 差 补偿 方 法 。
关键词:动调陀螺;多位 置寻北仪;转位误差;寻 北误 差
中图分类号 :V 4 . 21 5 文献标志码 :A
M ulipo ii n N o t e ke n Er o t- sto r h S e ra d r rAna y i fPo ii n l sso sto Tr n f r a i n Ba e n Dyna ia l a so m to s d o m c l Tun d Gyr y e o