CCD驱动电路的研究
CCD原理及应用试验
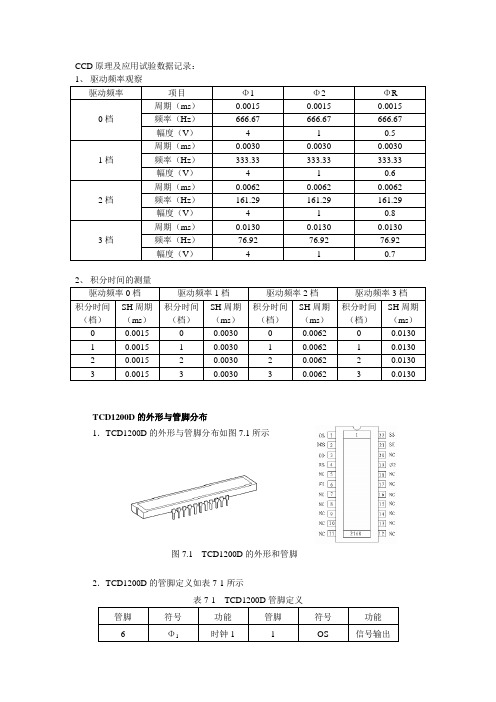
CCD 原理及应用试验数据记录:TCD1200D 的外形与管脚分布1.TCD1200D 的外形与管脚分布如图7.1所示TCD1200D的基本工作原理与工作时序图1.TCD1200D的基本工作原理如图7.2所示图7.2 TCD1200D工作原理图在CCD两侧的模拟转移寄存器,是由一系列MOS电容组成。
它们对光不敏感,只是接受摄像区转移来的电荷包,把他们逐个移位到输出机构中,最后传输到器件外面。
摄像区MOS电容在光照下获得光生载流子形成电荷包。
在电荷包转移期间,按奇偶序号分开,分别转移到两侧的移位寄存器中。
两个移位寄存器都有两相电极φ1、φ2与外电路相连。
当外电路对φ1、φ2提供适当的驱动脉冲时,移位寄存器中的电荷包就由右向左移位。
在结构安排上已经保证两寄存器中的电荷包以奇偶序号交替的方式把电荷包送到输出机构,以恢复摄像时的时序。
两相CCD电荷包转移原理如图7.3所示,通过控制电极SH、φ1、φ2的电位高低来改变势井的深度,从而使电荷包在势井中转移。
图 7.3 两相CCD 电荷包转移原理2.TCD1200D 的工作时序图如图7.4所示SH 为电荷转移控制电极。
SH 为低电平时处于“采光期”,进行摄像,MOS 电容对光生电子进行积累;SH 为高电平时,摄像区积累的光生电子按奇偶顺序移向两侧的移位寄存器中,时间很短,所以SH 脉冲的周期决定了器件采光时间的长短。
在这一个周期里,两侧的移位寄存器在φ1、φ2驱动脉冲的作用下把上一次转移来的电荷包逐个依次输出到器件外。
因此SH 的信号周期必须大于2048/2个φ1、φ2脉冲周期,否则电荷包不能全部输出,这样就会影响下个周期输出信号的精确度。
两侧移位寄存器中,每当φ1高电平时就输出一个电荷包,在结构上使两侧φ1电极轮流出现高电平,所以φ1、φ2脉冲一个周期内输出两个电荷包。
这样复位脉冲也应出现两次,所以RS 脉冲频率为φ1、φ2脉冲频率的两倍。
图7.4 TCD1200D 工作时序图。
基于CPLD的线阵CCD的驱动电路设计与实现

ห้องสมุดไป่ตู้
摘 要: C C D驱动时序 电路 的设计实现是其应用 的关键 问题。该 文在分析 T C D 1 2 0 9 D线阵 C C D的工作原 理和驱动时序等特性的基础上 , 提 出了一种基 于 C P L D的线阵 C C D驱动电路的设计方法 , 其 中选用 MA X I l 系歹 4 C P L D作为硬件设计平台 , 运用 V H D L 语 言设计 驱动时序电路 。该设计 使用 Q u a r t u s I I 软件对所设
l o g i c d e v i c e( C P L D ) i n t h i s p a p e r . I n o r d e r t o r e a l i z e t h e t i me s e q u e n c e d r i v i n g , t h e MA X I I d e v i c e s W a S u s e d
计的驱动程序进行 了仿真 , 仿真与实验结果表 明该方案设计可行 , 电路结构简单 , 集成度较 高 , 实用性强 ,
并具有一定通用性 。 关键词 : 线阵 C C D ; 驱动时序 电路 ; 复杂可编程逻辑器件 ; V H D L
中图分类号 : T N3 8 6 . 5 文献标识码 : A 文章 编号 : 1 0 0 3 - 0 1 0 7 ( 2 0 1 3 ) 1 0 — 0 0 1 3 - 0 5
CCD相机驱动电路设计和信号处理技术研究
第35卷,增刊、b1.35S uppl e m ent红外与激光工程I n厅a r e d锄d Las er E ngi ne er i ng2006年10月O ct.2006 C C D相机驱动电路设计和信号处理技术研究林秋月,宋秋冬,刘会通,李金龙(中国航天科工集团津航物理技术研究所,天津300192).。
摘要:介绍了一种ccD相机前端电路的软硬件设计与实现。
对ccD时序驱动电路和信号处理电路进行了分析‘,对拖影(§m e砷处理等难点问题进行了讨论,并介绍了针对B a yer彩色滤波阵列的彩色图像还原方法,给出了处理结果.关键词:C C D;驱动电路;信号处理;拖影;彩色插值中图分类号:TN7文献标识码:A文章编号:1007—2276(2006)增A-0476一07C CD cam er a dr i V i ng ci r cui t des i gn and r es ear ch ofs i gnal pr oces s i ng t e chnol ogyLI N Q i u一”e,SO N G Q i u—dong,LIU H i u-t on g,LI m-l ong(J i n h柚g I n鲥t ut e ofTe c h ni c al Ph ys i cs,C A SI C,Ti姐j in300192,C hi m)A bs t r act:TI l e des研锄d i l l l pl em ent at i on of C C D c锄era仔ont chui t ar e m ai l l l y desc曲ed,i ncludi ng C C D dr i Vi I l gci rcui t柚d s i gIl al proce ss i l l g c i rc ui t.T he s m ear pr ob l em is a l so de t a i l e dl y di s cus sed.Fi nal l y'i m ag e c ol or re st or at i on f or B ay er c ol or f i lt er a rr ay i s d印i cted and t he r e sul t i s pr esen t ed.K e y w or ds:C C D;D r i V证g ci rcui t;Si gnal pm ces s i ng;Sm ear;C ol or i nt e巾ol a t i onO引言C CD数字相机是可见光成像系统的核心,与传统胶片相机相比,其优点是:(a)容量大,处理周期短,实时性好。
一种CCD驱动电路的设计方法
编程对其硬件结构和工作方式进行重构 ,从而使得硬 件设计如 同软件设计那样方便快捷 。 I—3 LP 正常工作时需要 6 路驱动信号 , 即两相时钟 信号 C 1 C 2 R 和 R 、信号输出时钟信号 C L S 、像 元 R AT 复位信号 R T S 、行转移 同步信号 T K、积分 时间控制 C 信号 P 。整个驱动信号的工作过程如下 :当 T K 的 R C 高电平到来时, C C D传感器曝光的光敏单元会将采集
号 到来前 ,对残余信号进行清除。各驱动脉冲必须严
、 州. i e 43 ^ c m.3 f n _ v , 1
中阑儇嚣{表 2 7 第6 彝 0年 期 0
Ab t c : i a t l a e CCD ma e s n o P s n e a l, n a a y i f t m es re rv n c r u t a i, sr t a Th s r c et k i i g e s rI 3 a x mp e i n l s o st e i sd i e i i b ss L— a s i i c
高速 C D 的驱动时序是一组周期性且关系比较 C 复杂的脉 冲信号 ,它是影响 C D 器件的信号处理 能 C 力、转移效率、信噪高和采样速度快等 一系列特点,而成为现代 电
子学 和 现 代测 试 技 术 中最 话 跃 的传 感 器 。在 C D 应 C
Ke r sCCD Drv n crut I — 3 CP D ywo d : ie ic i L P L
随着 科学 技术 的发 展和数 据采 集系 统 的广 泛应 用 , 人 们 对 数 据 采集 传 输 系统 的主 要 指 标 ,如 采样 速 率 、
延迟的表面栅光敏单元 ;最大行扫速率为 1k z H ;过 9 饱和曝光时间的控制 ;动态范围大于 10: ; 80 1 具有 良
基于CPLD和VHDL的CCD驱动时序电路的设计
P D法 却 具 有 结 构 简 单 , 产 生 较 高 驱 动 频 率 等 优 点 , 兼 L 能 更 具 H L 硬 件 描 述 语 言 ) 述 功 能 , 得 驱 动 电 路设 计 更 加轻 松 , D( 描 使 时 序 信 号 稳 定 性 更 强 。现 在 C L 以 其 规 模 大 、在 系 统 编 程 PD ( P 、 度 快 、 靠 性 高 、 现 了硬 件 的 软 件 化 设 计 等 优 点 , 经 I )速 S 可 实 已 成 为 数 字 系 统 设 计 的 主流 。此 类 芯 片也 非 常 适 合 C D驱 动 电路 C
( ) P OM 驱 动 法 三 E R
ห้องสมุดไป่ตู้
E R M 驱 动 法 是 在 E R M 中 事 先 存 放 驱 动 C D 的 所 有 P0 PO C 时序信 号数据 , 计数 电路产生 E R M地 址 , 而使 E R M 由 PO 从 PO 输 出 特 定 的 时 序 信 号 , 编 制 E R M 程 序 单 调 繁 冗 、 出现 错 但 P0 易 误 , 调 试 带 来 困难 。 给
阵 CC 的驱 动 时序 电路 设 计 。通 过 在 M o ei S D d lm s E平 台下 对 驱动 时序 仿 真 , 并进 行 实 际测 量, 明 该 设 计 方 法 的 可行 性 。 结 果表 明 证
该设 计 方 案 实现 了对 CCD 器件 的 时序 驱 动 。
关 键 词 : P D; DL C C L VH ; CD; 动 时序 电路 驱
问题 。因 此 C D驱 动 时 序 电路 的设 计 , 成 了 C D应 用 技 术 中 C 就 C
来 实 现 , 目前 的 单 片 机 时 钟 频 率 较 低 , 此 由 指 令产 生 多 路 脉 而 因 冲 时 , 最 高 频 率 也 不 过 几 百 千 赫 兹 , 达 到 兆 赫 级 的 C D驱 其 要 C 动 频 率则 无 能 为力 。
线阵CCD图像传感器驱动电路的设计
路 与之 匹配 是 C D应用 中的关键技 术之 一 。 C 本 文 以 T D1 0 C型 C D 图像 传 感 器为 例 , C 51 C 介
3 驱 动 电路 的实 现
Ab t ac CCD tc n l g i d l u e i ltr n ii iedsTh d sg f d v r c r u tf r s r t: e h o o y s wi ey s d n mii y a d c vl l . e e i n o r e ic i o a f i
不 同型号 的线 阵 C D器 件 , 计 方便 灵活 的驱 动 电 C 设
强 弱积 聚相 应 的电荷 ,产 生与 光 电荷量成 正 比 的弱
电压 信号 , 经过 滤波 、 大处 理 , 过 驱 动 电路 输 出 放 通
一
个能 表示 敏感 物体 光强 弱 的 电信 号或 标准 的视频
信号 。基 于上述 将一 维光 学 信息转 变 为 电信 息输 出
2 CC 工 作 原 理 D
C D是 以 电荷 作 为 信号 , 不 同于其 他 大多 数 C 而 器 件是 以 电流 或者 电压 为信 号 ,其基 本功 能是 信号 电荷 的产 生 、 储 、 存 传输 和检 测 。 当光 入射 到 C D 的 C
光 敏 面时 . C C D首先 完 成光 电转 换 ,即产 生 与 入射 光 辐射 量成线 性关 系 的光 电荷 。C D 的工作 原理是 C 被 摄 物 体 反 射 光 线 到 C D 器 件 上 ,C C C D根 据 光 的
计 和 视 频 输 出 差 分 信 号 驱 动 电路 的 设 计 。
大学实验-线阵CCD原理及驱动

实验一线阵CCD原理及驱动一、实验目的①掌握本实验仪的基本操作和功能;②掌握用双踪迹示波器观测二相线阵CCD驱动脉冲的频率、幅度、周期和各路驱动脉冲之间的相位关系等的测量方法;③线阵CCD驱动脉冲的时序和相位关系观测,掌握二相线阵CCD的基本工作原理,尤其是复位脉冲CCD输出电路中的作用;转移脉冲与驱动脉冲间的相位关系,掌握电荷转移的过程。
④通过对典型线阵CCD在不同驱动频率和不同积分时间下的输出信号测量,进一步掌握线阵CCD的有关特性,加深对积分时间的意义的掌握,以及驱动频率和积分时间对CCD输出信号的影响。
理解线阵CCD器件的“溢出”效应。
二、实验前准备内容①学习线阵CCD的基本工作原理(参考有关教材),阅读双踪迹示波器的使用说明书;②学习TCD2252D线阵CCD基本工作原理(参考附录);③掌握双踪迹示波器的基本操作;④根据线阵CCD的基本工作原理,观测转移脉冲SH与F1(CR1)、F2(CR2)的相位关系,理解线阵CCD的并行转移过程。
观测F1与F2及F1与RS间的相位关系,理解线阵CCD 的串行传输过程和复位脉冲RS的作用;⑤测量驱动频率的不同调整档下的F1与F2、F1、RS的周期与频率以及CCD行(FC)周期为以下实验做准备。
三、实验所需仪器设备①双踪迹同步示波器(带宽50MHz以上)一台;②彩色线阵CCD多功能实验仪YHLCCD-IV一台。
四、实验内容及步骤1.实验预备①首先将示波器地线与实验仪上的地线连接好,并确认示波器和实验仪的电源插头均插入交流220V插座上;②打开示波器电源;③打开YHLCCD-IV的电源开关,观察仪器面板显示窗口,数字闪烁表示仪器初始化,闪烁结束后显示为“00 0”字样,前两位表示积分时间档次值,共分为32档,显示数值范围由“00”~“31”,数值越大表示积分时间越长。
末位表示CCD的驱动频率,分4档,显示数值范围“0”~“3”,数值越大表示驱动频率越低。
基于CPLD的CCD驱动电路的设计

前 3种 方法基 本偏 重硬 件 的实现 , 调试 困难 , 活性 灵 较差 。而后 一种 方法 虽 编 程 灵 活 , 但存 在 资源 浪 费
较 多 、 率较低 的缺陷 ¨ 。 频
离 行 。该 C D需要 l 驱动 信 号 。包 括 感光 区转 C 2路 移 脉 冲 ( :12,, ) 存储 区转 移脉 冲 M i i , 34 、 ( ( =1 i , =1234 、 储 区到 水 平读 出移位 寄存 器 转移 脉 , ,,)存 冲 M、 水平 读 出移 位 寄 存 器 转 移 脉 冲 2 、 出放 大器 复位脉 冲 彻 。 )读 由该 款 C D的结 构可 知 , C C C D的一个 工作 周期 分 为 两个 阶段 : 光 阶段 和 高 速 转移 阶段 。感 光 阶 感
只须将 C L 内部 逻 辑 重 新 编 程 即可 。2因此 非 常 PD l 适合 C D驱 动 电路 的 设 计 、 作 、 试 和进 一 步 开 C 制 调 发、 升级 。现 给 出一 个 基 于 C L P D技 术 的 面阵 C D C 驱动 电路 的完 整 的硬件设 计 。
S iT c n lg n gn e i g ce e h oo y a d En ie rn
基于 C L P D的 C D驱 动 电路 的 设 计 C
陈 智 邱 跃 洪 张 伯 珩 ’
( 中国科学院西安光学精密机械研究 所 西安 7 0 1 ; , 1 19 中国科学院研究生院 北京 10 3 , 0 09)
智( 9 8 ) 女 , 17 一 , 陕西西安 人, 汉族 , 中国科 学
院西安光 学精密机械 所在读博士研究生 , 研究方 向: 光电信号处理
及 C D相机设计 。E—ma : n yz i.ia Cr。 C i s dc@rp s .O la n n
CCD 传感器阵列原理及驱动实验

加在 CCD 移位寄存器 1 和 CCD 移位寄存器 2 的二相时钟脉冲时序不同,前者为 F1、F2,后者 为 F2、F1,从而保证转移到 CCD 移位寄存器 2 的奇数像元的光电荷时序在前,转移到 CCD 移位寄 存器 1 的偶数像元的光电荷时序在后,正好错开,合在一起成为按时序输出的串行视频信号。
F1
F2
6
19
D15
CCD 移位寄存器 2 转移栅 2
...
.... 光电 ....
二极管
...
转移栅 1 CCD 移位寄存器 1
21 SH
22 SS
图 1 -2 TCD1206SUP 的基本结构
图 1-1(a)为一种单排结构,用于低位数 CCD 传感器。它的光敏单元与 CCD 移位寄存器 SR 分开, 用转移栅控制光生信号电荷向移位寄存器转移,一般使信号转移时间远小于摄像时间(光积分时间)。 转移栅关闭时,光敏单元势阱收集光信号电荷, 经过一定的积分时间,形成与空间分布的光强信号 对应的信号电荷图形。积分周期结束时,转移栅打开,各光敏单元收集的信号电荷并行地转移到 CCD 移位寄存器 SR 的响应单元内。转移栅关闭后,光敏单元开始对下一行图像信号进行积分。而已转
有一定的起伏?可以采用什么方法来进行处理?
(5)驱动频率和积分时间对 CCD 输出的影响是什么?
【实验总结】
(1)说明 TCD1206SUP 的基本工作原理。
2
(2)FR 脉冲、SH 脉冲和 F1、F2、M-CEL 脉冲的作用及测量方法,输出信号与 F1、F2 周期的关 系。 (3)说明积分时间的含义,解释驱动频率对积分时间的影响,说明增加积分时间以后,输出信 号的变化及其原因。
线阵CCD驱动电路的研究
在现代 测量技 术 中 , 常要 检测 高速 物体外 形 的尺 寸 、 动 、 常 振 飞行姿 态 , 那么 C D的 C
驱 动 速 度 及 硬 件 性 能 的 好 坏 , 接 影 响着 测 量 精 度 和 系 统 的 功 能 . 论 文 设计 了一 套 完 整 直 奉 的C CD 驱 动 电 路 来 驱 动 高 速 线 阵 C CD 像 敏 器 件 , 而 提 高 C D 的传 输 速 度 和 C 从 C CD 输
维普资讯
1 4
山西 师 范大 学学 报 ( 自然 科 学 版 )
CC 传 感 器 是 摄 像 系 统 的 核 心 , 性 能 的 优 劣 直 接 影 响 系 统 的 功 能 和 使 用 效 果 , D 其 目 前 国 内 外 市 场 上 可 以 买 到 各 种 规格 和 性 能 的 线 阵 C D 传 感 器 , C 在灵 敏 度 、 电流 、 辨 率 暗 分 和 可 靠 性 等 方 面 都 能 满 足 一 般 工 作 要 求 . CD 的 像 元 数 从 1 8位 到 5 0 C 2 0 0位 已 构 成 一 个 系 列 , 般 说 可 以 根 据 工 作 视 场 、 离 、 方 分 辨 率 、 量 精 度 的 不 同 选 择 不 同 型 号 的 一 距 物 测 CC 器 件 , D 其所 需 像 元 数 可 由下 式 求 得 :
维普资讯
山西 师 范大 学 学报 ( 自然科 学 版 )
第 l 6卷 第 l期 2 0 0 2年 3月
J u na fS a iTe c e 。 uv r Ly o r l。 h nx a h rs U l e st
Na u a c e c i i t r lS [ n e Ed t on V 0 1 N0. 1 I 6 M a c 2 0 rh 02
基于电子快门自动增益的CCD驱动电路研究

基于电子快门自动增益的CCD驱动电路研究翟晶晶【摘要】为了满足目前CCD测量领域中高速、高精度的测量要求,设计了TCD1304传感器的专用驱动电路.该驱动电路的一大特性就是电子快门,其将光积分时间缩短了一个数量级,至几个微秒,极大地提高了测量速度;同时,通过对CCD输出信号A/D采样分析,实时调节电子快门时间,实现自动调节控制,提高了测量精度.经实验证明,该测量方法在高速实时在线测量领域有很好的应用前景.【期刊名称】《现代电子技术》【年(卷),期】2010(033)019【总页数】3页(P188-190)【关键词】电子快门;自动增益;TCD1304;CCD传感器【作者】翟晶晶【作者单位】中国船舶重工集团公司,第七一〇研究所,湖北,宜昌,443003【正文语种】中文【中图分类】TN919-340 引言CCD是以电荷包的形式存贮和传递信息的半导体表面器件,目前市场上的CCD器件并未对其驱动信号、输出信号做任何处理。
因此,在实际应用中,需要根据CCD的型号、用途和应用领域的不同而设计不同的驱动电路,以及数据采集、处理系统[1]。
CCD的光积分时间决定着CCD的曝光量,在不同的光照强度下,需要的实际光积分时间不同。
光强较弱时需要较长的光积分时间,以使光敏单元吸收到足够的光信息;相反,光强很强时,光积分时间不能太长,否则CCD的输出信号会饱和失真,不能准确地反应要测量的信息。
因此要得到精确的测量信号,就需要实时的调节光积分时间。
CCD传感器必须在一定的驱动脉冲的作用下才可以完成信号电荷的转移、输出。
在一定的驱动频率内,提高驱动信号的频率则会加快电荷包的移动,从而提高测量速度;反之,降低驱动信号的频率则会降低测量速度。
因此要提高测量速度就要提高驱动信号的频率,而在某些场合需要将光积分时间提高到10 μs时,就需要将时钟频率提高到几百兆,频率太高又引出更难、更复杂的问题,而且这种方法下测量速度的提高空间也是有限的。
基于高速SOC单片机的面阵CCD驱动电路设计

青 岛港湾职业技术学院 李心平 井延波 郭梅忠
电荷耦合 器件( 是2 世纪7 频率 ,对不 同的CCD器件 只需要修 改 门提供 的配套 电平转 换芯片SN2 8 6 CCD) 0 0 8 4 年 代初发展 起来 的新型 半导体 集成 光 程序 即可 。但 由于 时序 的产生 完全 依 与 T M S3 7 4 3, 实 现 了 C8 5 F3 l 0 1 l 电器件 。近年 来 ,CCD器件 在 图像 赖 程序 指令 的延时 来实现 ,如 果程序 传感和 非接 触测量 领域 的发展 迅速 。 ( 3 3. V)与 C CD( 电 平 2 高 V,低
S RGi RG2 与S 之间严格的时序对应关
( PCAO PL =PC L C n A0 )时 ,CEXn
图2 中,ABG 为防开花脉冲 ,I 系 ,因此 ,利 用C8 5 F3 l 可编程 的电平发生改变 ,同时捕捉/ AG 0 I 1的 比较 模块 为 行 移脉 冲 ,TR G为行 转 移 门控 脉 计数 器阵 列 ( PCA)模块 ,并通过相 的高字节P AO P 与PC c L 相 C C Hn A0 P n 冲 ,S RG1 RG2 串行移位 脉冲 , 、S 为 应的 中断 服务程 序 ,实现 各时序 之间 加的结果再 回送NPCA CPL 。方波 0 n
W 素单元面积为9. ×9 /m m;动态范 围 t 容的 微控制器 内核 ,与 M 一 1 CS 5 指令 P M ,每 个 模 块 的 工 作 方 式 都 可 以被 很 大 、灵敏度高 、噪 声低 ,并 内置 自 集完 全兼 容 ,具 有丰 富的 片上硬 件资 独 立 配 置 。
1 TC2 5 2
TC 2 是TI 2 5 公司推出的一款 全帧 读 出型 面阵 图像 传感 器 ,是 专门为 适
CCD时序驱动电路设计
时序设 计 都是采 用 C L 来 实现完 成 的。 P D
1 C CD 工 作 时 序 分 析
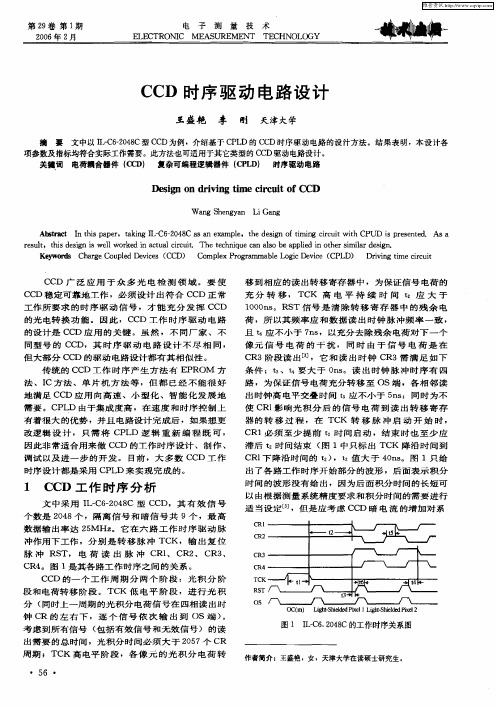
文 中 采 用 I - 62 4 C 型 C D, 其 有 效 信 号 L C -O 8 C 个 数是 2 4 0 8个 , 隔 离 信 号 和 暗 信 号 共 9个 ,最 高
数 据 输 出 率 达 2 M Hz 它 在 六 路 工 作 时 序 驱 动 脉 5 。
条 件 :t t 要 大 于 0 s n 4 n 。读 出 时 钟 脉 冲 时 序 有 四
同 型 号 的 C D,其 时 序 驱 动 电 路 设 计 不 尽 相 同 , C
但 大部 分 C D的驱 动 电路设计 都 有其 相似 性 。 C
传 统 的 C D 工 作 时 序 产 生 方 法 有 E ROM 方 C P 法 、I C方 法 、单 片 机 方 法 等 ,但 都 已 经 不 能 很 好 地 满 足 C D 应 用 向 高 速 、 小 型 化 、智 能 化 发 展 地 C 需 要 。 C L 由 于 集 成 度 高 ,在 速 度 和 时 序 控 制 上 P D
有 着 很 大 的 优 势 ,并 且 电 路 设 计 完 成 后 ,如 果 想 更 改 逻 辑 设 计 , 只 需 将 CPL 逻 辑 重 新 编 程 既 可 , D
路 ,为 保 证 信 号 电 荷 充 分 转 移 至 OS端 ,各 相 邻 读 出 时 钟 高 电 平 交 叠 时 间 t 应 不 小 于 5 s 同 时 为 不 s n:
使 C 影 响光 积 分 后 的 信 号 电荷 到读 出 转 移 寄 存 R1 器 的 转 移 过 程 , 在 TCK 转 移 脉 冲 启 动 开 始 时 ,
C 必 须 至 少 提 前 t 时 间 启 动 ,结 束 时 也 至 少 应 R1 z 滞 后 t 时 间 结 束 ( 1中 只 标 出 T K 降 沿 时 间 到 2 图 C
基于CPLD的线阵CCD驱动电路设计方法的研究与实现

.
Iske e t e , prn i e a sg de ft e t i g s q n e t y faur s i cpl nd dei i a o i n e ue c n s h m
0 引言
C D( h reC u l e ie) C C ag o pe D vcs,电荷 耦合器件 ,是 d 七十年代初 发展起来 的新型半导体 器件 ,它是 美国 贝尔 实 验 室 的 w..o l G..mi SB ye和 ES t h于 1 7 首 先 提 出 9 0年 的 …。后 来很快 被 Ama o等 人的 实验 所证 实 。在 经历 l l 了几年 的研 究阶段之 后 ,建立 了以一维势 阱模 型为基础 的非稳态 C D基本理 论。3 C 0年来 ,C CD器件理论及其 应用技术 等的研究取 得了极大 的发展 ,尤其在 图像传感
i egn en e sT id v rs ee pdo e as f P D,adr hitrc g a e rvddfr srw t n n er g l . hs r e vl e nt s L i i fd i i id o h b io C n c e ae i la o i es i i n f s srp n e ou h
摘 要 :以典型 的线阵 C DI C  ̄像传 感器件 T D3D C 1 为例 ,设计和开发 了一种 线阵C D  ̄ 2 C  ̄ 动电路。电路主要采用 了复杂 可编程逻辑器件 (P D ,充分发挥其 “ CL) 可编程 ”的技术 特性 ,为用户提供 了丰富的接 口信号 。介 绍了
该驱 动电路 的主 要特性 、工 作原理和驱 动时序 的设 计思想 ,阐述 了逻辑 设计原理 ,给出 了cP D实现 电路和 L
CCD相机系统中驱动电路的设计

3 驱动电路
CCD 图像传感器的驱动。简言之就是通过驱动电路产生CCD正常工作所需的特定脉冲。为了产生的各路驱动脉冲以及满足传感器的小型化和工作速度的要求。采用复杂可编程逻辑器件CPLD实现其逻辑功能是一个较好的选择。CPLD是基于乘积项结构,可实现各种逻辑运算.全硬件结构,具有极大的灵活性和通用性,使用方便,硬件测试和实现快捷,开发效率高,成本低,上市时间短,技术维护简单,工作可靠性好等优点。在该设计中,μPD795所需的驱动脉冲是在 Max+PlusⅡ环境下完成设计并编译、校验后在线下载到CPLD器件内部,实现逻辑功能。实际的驱动电路的原理结构图。该例中的驱动电路并不复杂,所用的器件也有限。但若驱动脉冲种数继续增加,则电路的复杂程度也要成比例增加。该设计中采用EPM7064SLC44-7,该芯片由64个宏单元组成,是Altera公司生产的MAX7000S系列中芯片的一种,可以实现在线编程。在Max+PlusⅡ环境下进行了仿真,得到了满意的结果后进行了硬件设计。
电荷耦合器件不同于普通的MOS型半导体器件,它需要在较复杂的驱动脉冲下才能正常工作。在CCD应用技术中,用于产生CCD驱动时序的设计,是CCD数据采集电路设计的关键之一。产生驱动时序的方法多种多样,常用的有下面几种:EPROM方法、直接数字电路驱动方法、单片机、专用IC等,各有优缺点。由于CPLD的集成度高,在速度和时序控制上具有较大的优势,而且在电路设计完成后,可以根据需要将CPLD逻辑重新编程,因此选用CPLD来设计CCD的驱动时序是一种不错的选择。目前,大多数CCD工作时序设计都是采用CPLD来实现和完成的。
2 系统框图
整个驱动电路系统可以分为四个部分;,包括脉冲发生电路、分频电路、控制与分频电路以及脉宽调制电路。脉冲发生电路可由74LS00和7.5 MHz的晶振以及相应的阻容电路组成,该部分相对简单,电阻和电容的数目也不多。分频电路可选用D触发器/JK触发器,如 74LS(HC)74,74LS(HC)76,均带置位、清零端,较易控制;采用同步计数器74LS163实现逻辑功能,该计数器为四位二进制可编程计数器。当然也可以采用82C54(10MHz可编程)。控制电路由μPD4011,μPD4012,μPD4013以及74LS27组成。μPD4011作为外部控制信号可以起到调整频率的作用。脉宽调制电路由与非门、或非门和带有直接清零功能的二进制同步计数器组成。
电子倍增CCD驱动电路设计
波形 , 采用 E L 7 4 5 7 高速MO S F E T 驱 动芯片对 F P G A输 出信号进行电平转换以满足 E MC C D驱动 电压要求 , 并 由分立的推挽放大电 路驱动高 电压信号 , 输 出电压 2 0 ~ 5 0 V可调 , 像 素读 出频率达 5 MH z 。实验结果表 明, 该驱 动电路能够使 E MC C D正常 工作输出有
me t a l - o x i d e - s e mi c o n d u c t o r i f e l d e f f e c t r t a n s i s t o r f M OS F E T) d r i v i n g c h i p S O a s t o me e t t h e r e q u i r e me n t s o f
Dr i v i n g Ci r c u i t De s i g n f o r El e c t r o n i c Mu l t i p l i c a t i o n CCD
CCD实验报告

1.掌握本实验仪的基本操作和功能。
2.掌握用双踪迹示波器观测二相线阵CCD 驱动脉冲的频率、幅度、周期和各路驱动脉冲之间的相 位关系等的测量方法。
3.线阵CCD 驱动脉冲的时序和相位关系观测,掌握二相线阵CCD 的基本工作原理,特别是复位脉冲 在CCD 输出电路中的作用;转移脉冲与驱动脉冲间的相位关系,掌握电荷转移的过程。
1.双踪迹同步示波器(带宽50MHz 以上)一台。
2.彩色线阵CCD 多功能实验仪YHCCD -IV 一台。
1) 首先将示波器地线与实验仪上的地线连接良好,并确认示波器和实验仪的电源插头均插入交流220V 插座上。
2) 打开示波器电源。
3) 打开YHCCD -IV 的电源开关,观察仪器面板显示窗口,数字闪烁表示仪器初始化,闪烁结束后显示为“00 0”字样,前两位表示积分时间档次值,共分为32档,显示数值范围由 “00”~“31” ,数值越 大表示积分时间越长。
末位表示CCD 的驱动频率,分4档,显示数值范 围“0”~“3”,数值越大表示驱动频率越低。
1) 将示波器CH1和CH2扫描线调整至适当位置,同步设置为CH1。
对照“附录”中TCD2252D 的驱 动波形进行下面的实验。
2) 用CH1探头测量转移脉冲SH ,子细调节使之稳定(同步),使SH 脉冲宽度适当以便于观察。
(将示波器的扫描频率调至2μs 档摆布,便于观察对照)用CH2探头分别观测驱动脉冲F1与F2, 这就是SH 与F1、F2的相位关系。
3) 用CH1探头测量F1信号, CH2探头分别测量F2、RS 、CP 、SP 信号,这就是F1与F2、RS 、CP 、SP 信号之间的相位关系。
4)用CH1探头测量CP 信号, CH2探头分别测量RS 、SP ,这就是CP 与RS 、SP 信号之间的相位关系。
5) 将以上所测的相位关系与TCD2252D 的驱动波形相对照。
1) 用示波器分别测量4档驱动频率下F1、F2、RS 信号的周期,并计算信号频率填入表1-1。
线阵CCD驱动电路的可编程设计与实现
第2 2期
20 0 8年 1 月 1
科
学
技
术
与
工
程
V0. N . 2 NO . 2 0 18 o2 V o8
17 —8 9 2 0 )26 1—4 6 1 11 (0 8 2 —0 10
S in e T c n l g n n i e r g ce c e h o o y a d E gn ei n
因此 , 结合 实 际应 用 需 要 , 计 了基 于 可 编 程 逻 辑 设
器 件设 计法 的线 阵 C D驱 动时序 电路 。 C
2 C D驱动 电路设计 C
2 1 C D 驱动 电路 的时序 要求 . C T D 3 D是 T sia公 司 生 产 的 一 种 高 灵 敏 C 12 ohb
修改设 计 中的 问题 。利 用 IP技 术 后 , S 电路 系统 的 硬件 设 计 变 得 像 软 件 设 计 那 样 灵 活 而 又 易 于
修改
测 、 线模 式识 别 、 事 侦 察 、 学 摄 影 、 能 传 感 在 军 光 智
等方 面¨ 。 随 着 C D应 用 范 围 日益 广 泛 , 确 保 C 对 C D稳定 高效工作 的 C D驱动设计 也提 出 了更 多 、 C C
C D 电荷转 移 寄存器 , C 内部集 成 有驱 动 电路和 信号
处理 电路 。器件工 作在 5V驱 动 ( 冲) 1 电 脉 和 2V 源条件 下 , 每个像 元 的尺 寸为 1 m长 ,4 m 高 , 4 1
第一作者简介 : 黄俊杰 , 18 一) 男 , ( 94 , 汉族 , 江西 九江人 , 硕士生
E m i: ni 4 6 13 cm。 — al uj 86 @ .o j e 6
自动光圈镜头的DC驱动电路-分析
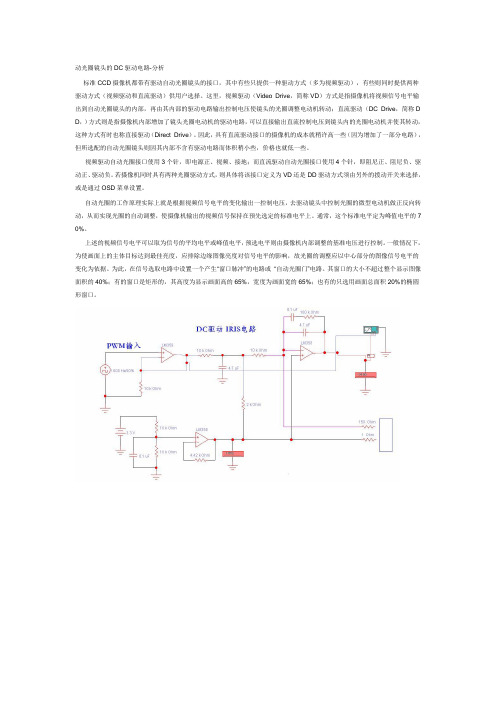
动光圈镜头的DC驱动电路-分析标准CCD摄像机都带有驱动自动光圈镜头的接口,其中有些只提供一种驱动方式(多为视频驱动),有些则同时提供两种驱动方式(视频驱动和直流驱动)供用户选择。
这里,视频驱动(Video Drive,简称VD)方式是指摄像机将视频信号电平输出到自动光圈镜头的内部,再由其内部的驱动电路输出控制电压使镜头的光圈调整电动机转动;直流驱动(DC Drive,简称D D,)方式则是指摄像机内部增加了镜头光圈电动机的驱动电路,可以直接输出直流控制电压到镜头内的光圈电动机并使其转动,这种方式有时也称直接驱动(Direct Drive)。
因此,具有直流驱动接口的摄像机的成本就稍许高一些(因为增加了一部分电路),但所选配的自动光圈镜头则因其内部不含有驱动电路而体积稍小些,价格也就低一些。
视频驱动自动光圈接口使用3个针,即电源正、视频、接地;而直流驱动自动光圈接口使用4个针,即阻尼正、阻尼负、驱动正、驱动负。
若摄像机同时具有两种光圈驱动方式,则具体将该接口定义为VD还是DD驱动方式须由另外的拨动开关来选择,或是通过OSD菜单设置。
自动光圈的工作原理实际上就是根据视频信号电平的变化输出一控制电压,去驱动镜头中控制光圈的微型电动机做正反向转动,从而实现光圈的自动调整,使摄像机输出的视频信号保持在预先选定的标准电平上。
通常,这个标准电平定为峰值电平的7 0%。
上述的视频信号电平可以取为信号的平均电平或峰值电平,预选电平则由摄像机内部调整的基准电压进行控制。
一般情况下,为使画面上的主体目标达到最佳亮度,应排除边缘图像亮度对信号电平的影响,故光圈的调整应以中心部分的图像信号电平的变化为依据。
为此,在信号选取电路中设置一个产生“窗口脉冲”的电路或“自动光圈门”电路。
其窗口的大小不超过整个显示图像面积的40%;有的窗口是矩形的,其高度为显示画面高的65%,宽度为画面宽的65%;也有的只选用画面总面积20%的椭圆形窗口。
探究CCD 控制电路设计
69Internet Technology互联网+技术王伟钢,(1977-),男,天津人,中国人民解放军海军装备部,工程师,飞机总体专业,主要研究航空飞行器、武器装备的试验试飞体系与试飞测试方向。
参 考 文 献[1] 陈曦原.信道编码技术在卫星通信中的重要应用研究[J].数字通信世界,2019,2:172-175.[2] 邹星,李金喜,丁勇飞. 航空通信系统中信道编码理论及应用分析[J]. 电光与控制, 2015,22(10):68-72.[3] 鲁芳旭, 刘翠海. RS 码的性能分析与仿真[J]. 数字技术与应用,2020,38(8):25-27.[4] 易旭, 杜昊阳. LDPC 码的研究进展与应用展望[J]. 通信技术,2016,49(1):01-06.[5] 杨磊鑫. 基于纠错码的Niederreiter 公钥密码体制的研究[D]. 长沙:长沙理工大学, 2011.[6] 耿自成. LDPC 码的编译码研究及优化[D]. 天津:天津大学,2009.[7] 李薰春. Turbo 码及其仿真研究[J]. 北京广播学院学报, 2003,10(4):25-32.[8] 叶睿. 多维Turbo 码的分析和研究[D]. 成都:电子科技大学,2008.[9] 张玉玲. 基于LDPC 码的链路自适应技术研究[D].济南:山东大学, 2007.[10] 张雪娜. 超宽带无线通信数据帧协议中LDPC 码的应用研究[D]. 沈阳:沈阳理工大学, 2008.CCD 控制电路由CCD 电极驱动电路、CCD 信号放大电路、模/数转换电路、数据采集电路、动态存储器SDRAM、数据传输电路组成。
其中CCD231光电传感器包含3个register 电极:3,2,1ΦΦΦR R R ,1个复位电极:R Φ,4个image 电极:4,3,2,1ΦΦΦΦI I I I 。
CCD231包含4096(H)x4112(V)个像素,image 时钟将一行像素移入register,然后register 时钟将4096个register 中的像素依次转移到输出放大器OSE,OSF,OSG,OSH。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
东北电力学院学报第22卷第1期 Journal Of Northeast China Vol.22,No.12002年3月Institute Of Electric Pow er Engineering Mar.,2002收稿日期:2001-05-29作者简介:郭朝晖(1968-),男,湖南湘乡人,工程师,主要研究仪表检测文章编号:1005-2992(2002)01-0059-03CCD 驱动电路的研究郭朝晖(湖南湘潭工学院数理系,湖南411201)摘 要:以TCD132D 为例,根据CCD 的结构和工作原理,提出了设计驱动电路的方法,并且设计了TCD132D 的驱动电路。
同时给出了实验结果。
关 键 词:CCD 驱动 脉冲中图分类号:TP212.3 文献标识码:A1 引 言CCD 是半导体存储器的一种,七十年代初才出现。
作为一种新型的MOS 器件,与普通MOS 器件相比,具有更高的集成度、更低的功耗、设计简单、制造工序少等优点。
因此,在航空工业、航天、雷达、通信、气象、电视以及军事部门得到了应用。
在成像、信号处理和存储信号的应用中,作为成像传感器的应用尤为令人瞩目。
在CCD 产品中,厂家提供了完整的芯片及其驱动电路。
但是,作为一种新技术,厂家对其电路采取了保密措施。
这给用户的使用带来了极大的困难。
基于上述困难,下面以TCD132D 为例介绍CCD 驱动电路的设计方法,以求对大家有所帮助。
2 TCD132D 基本结构及工作原理图1为TCD132D 的内部功能框图。
从图中可以看出TCD132D 为1024单元的双通道型线阵CCD ,它包含1024个像传感单元的信号预处理电路、驱动电路。
CCD 驱动电路由脉冲发生器和驱动器组成。
信号预处理电路由箝位电路、采样/保持电路和放大器组成。
它由脉冲信息ΦM 、ΦCCD 、ΦSH 驱动[1][2]。
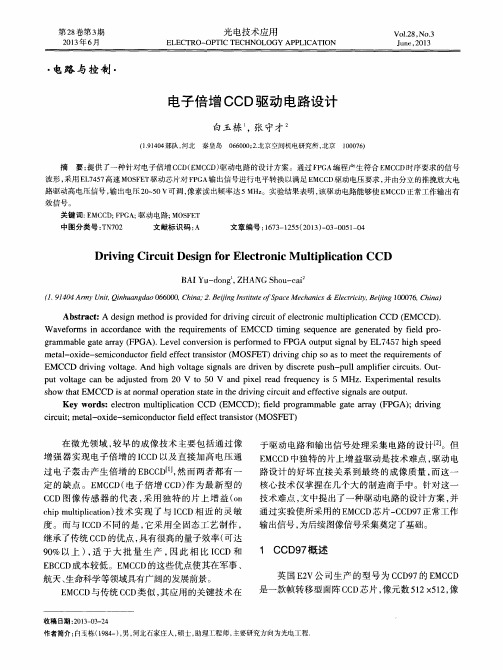
图1 TCD132D 结构原理图 图2 三相栅压波形图 由图1可知,TCD132D 由三相时钟脉冲驱动。
在三相结构的CCD 中,三个电极组成一个单元,形成一个像素。
三个不同的驱动脉冲,按图2所示的时序提供,以保证形成空间电荷区的相对时序。
如果某时刻t 1第一相Φ1为高电平,Φ2、Φ3处于低电平,移位寄存器中所有Φ1电极下均形成深势阱。
t 2时刻,Φ1电平下降,Φ2跳变到电平最大,电荷包便从Φ1的各电极下向Φ2的各电极下转移,形成新的势阱。
到t 3时刻,全部的电荷包转移完毕。
t 4时刻开始,Φ2电平下降,Φ3电平跳变到最大,于是电荷包从Φ2电极下转移到Φ3电极下。
当重复周期开始时,重复上述过程,而每个周期都完成一个像素的转移。
这样只要有交替变化的Φ1、Φ2、Φ3三相驱动脉冲就可以完成电荷包的定向移动,而CCD 末端可依次接收到原先储存在各电极下的电荷包。
所以驱动电路的关键技术就是如何产生符合要求的三相驱动脉冲。
图3为TCD 132D 脉冲时序及输出信号。
从图可以看出对波形的要求:(1)矩形边缘陡峭:(2)ΦM 占空比为50%;(3)ΦCCD 为ΦM 的四分频信号;(4)ΦM 、ΦCCD 、ΦS H 幅度一致;(5)ΦS H 至少包含2182个ΦM 周期;(6)ΦM 要满足一定的频率要求。
图3 TCD132D 工作波形图3 TCD132D 脉冲产生电路的设计电路中ΦM 、ΦCCD 、ΦSH 就是图2中的Φ1、Φ2、Φ3信号。
1.ΦM 产生电路的设计脉冲ΦM 产生电路设计要求:a.输出信号频率可调;b.矩形波为50%占空比、边缘陡峭的振动信号;c.ΦM 频率为1MHZ 左右。
因此选用7414施密特触发器组成多谐振动器,通过改变R 、C 数值,即可得到可调的ΦM 信号。
R 的值由7414的阀值电平和扇出系数确定[3]。
2.ΦCCD 信号是ΦM 的四分频,两者可直接在CD4040上引出。
3.ΦSH 的产生由工作波形图可知,ΦSH 至少应包含2182个ΦM 周期,设计时取T SH =2188T M =(211+27+23+22)T M 。
如果ΦM 的二、三、七、十一分频信号同时存在,则可通过电路产生ΦSH =2188T M 。
设计时选用COMS 集成电路CD4040。
CD4040为12位二进制行波计数器,由下降沿触发。
每当时钟有一个下降沿到来时,计数器的计数值加“1”。
当异步复位端MR =1时,所有各级的计数器都被清零[4]。
具体电路设计如下:06 东北电力学院学报第22卷图4 驱动电路原理图4 实验结果与讨论使用本电路可以产生合乎要求的三相时钟信号,并驱动TCD132D 正常工作。
但是测试电路时必须满足以下条件:1.ΦM 信号应由自行设计的电路产生,如采用实验室用信号源,会导致CCD 芯片损坏。
因为信号源为交流输出信号,所以导致ΦM 、ΦCCD 、ΦSH 幅度不一致。
2.ΦM 信号边缘陡峭,上冲延时应小于200ns ,否则CCD 芯片使用时会发热,导致损坏。
3.采样保持电路S/H 需要一个参考电位V REF =5V ,V AD 、V DD 接12V 电源,两者绝对不能接反,否则会损坏CCD 芯片。
4.在无时钟信号ΦM 的状态下,不可接5V 、12V 电源,否则会损坏CCD 芯片。
5.用示波器观察CCD 输出信号时,必须接上射级跟随器,否则会损坏CCD 芯片。
6.焊接电路时,应使用松香助焊剂,不要使用焊锡膏或其它有腐蚀性的助焊剂,否则容易造成短路。
在教学中,利用此驱动器电路,对波动光学中的干涉、衍射的光谱强度分布进行观察和测量[5]。
可改变传统的做法:只能对条纹数据进行分析和计算,却不能进行观察。
CCD 可把光谱强度的分布即时显示在示波器上,实验现象明显、测量精度也高。
如示波器上输出图形的每一个小折线段对应CCD 内的一个光敏元,相邻光敏元间距可由资料查得,数出图线两点之间的折线段数就可以知道对应的光敏元数目,从而精确地知道图线上这两点对应的几何距离。
从而求出条纹的宽度。
参 考 文 献[1] 刘广玉,陈明,吴志鹤,樊尚春,新型传感器技术及应用,北京航空航天大学出版社,1995[2] 王有庆,孙学珠,何在新,CCD 应用技术,天津:天津大学出版社,1993[3] 数字电子技术基础,阎石,北京:高等教育出版社,1984[4] 中国集成电路大全,国防工业出版社,1995[5] 黄林强,万安君,曹明翠等,大型光点列阵检测系统研究,激光技术,1996,20(3):152(下转第43页)16第1期郭朝晖等,CCD 驱动电路的研究 7 结 论本文近似算法的思想,对类似排课表问题有一定的实用价值。
作者编制的排课表程序在本校试用效果良好,达到了排课程序化处理,表明该算法有效。
参 考 文 献[1] 王朝瑞.图论[M ].北京:北京理工大学出版社,1987.[2] 美S.巴斯著,朱洪,游之墨,胡美琛译.计算机算法:设计和分析引论[M ].上海:复旦大学出版社,1985[3] 靳蕃,范俊波,谭永东.神经网络与神经网络计算机[M ].成都:西南交通大学出版社,1991.[4] 南京地区工科院校数学建模与工业数学讨论班编.数学建模与实验[M ].南京:河海大学出版社,1996[5] 王树禾.数学模型基础[M ].合肥:中国科学技术大学出版社,1996[6] 杨骅飞,王朝瑞.组合数学及其应用[M ].北京:北京理工大学出版社,1992The Approximation Algorithm for A NP ProblemY U Biao(Y angzhou Polytechnic College ,Y angzhou City 225002)Abstract :This paper explores the approximation algorithm to the problem of programmed schedule -mak 2ing ,and presents a practical approximation algorithm ,which to a great extent can solve the problem of pro 2grammed schedule -making.K ey w ords :Edge coloring ;Approximation solution ;N P problems(上接第61页)Study of the Drive Circuit of Charge Coupled DeviceGU O Zhao 2hui(Xiang Tan Polytechnic University ,411201)Abstract :Taking TCD132D as example ,according to the basic structure and work principle of CCD.The method of CCD of designing the drive circuit is advanced And the drive circuit of TCD132D is designed.At the same tane The test results of TCD132D are also a introduced in this paper.K ey w ords :CCD ;drive ;pulse.34第1期于标,一个NP 问题的近似算法 。