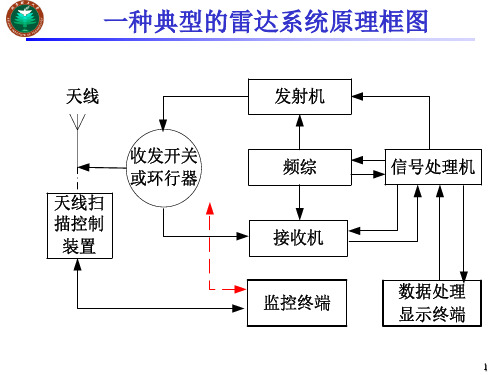
监视系统 雷达终端显示器和录取设备
雷达探测监控系统方案设计

基于雷达探测的区域监控系统目录1概述22安全防护系统的目前面临的问题33区域监控系统总体方案43.1方案概述43.2系统特点4基于雷达探测,实现全局可靠监视4采用虚拟围界,实现警戒区的灵活配置4利用跟踪探测,实现突发情况后期处置4无视环境影响,实现全天时全天候工作4长焦距探测器,确保对远距离目标的识别5光雷配合联动,实现发现即看到5目标跟踪处理,实现对目标的持续观测5智能分析处理,实现无人值守5架设方便简单,实现最小工程量安装5质量性能可靠,基本实现免维护使用53.3单点监控系统概述6单点监控系统组成6单点监控系统工作流程概述6主要功能7单点监控系统主要设备介绍73.4组网监控系统概述10组网监控系统组成10组网监控系统工作流程概述10组网监控系统主要设备介绍11监控中心及分中心主要功能124附件144.1各型号地面监视雷达主要技术指标144.2各型号光电探测系统主要技术指标17注:公司配有多种可见光探测器和红外热像仪,可根据用户需要进行配备。
19基于雷达探测的区域监控系统1 概述随着社会发展,安防工作已成为国家和社会的重要工作,传统的安防设备一般以视频监控为主,特别是边防监控、要害地域外围监控基本上还是以人工巡逻、望远镜等传统方式。
在天气良好的情况下,视频监控可以很好的解读监控问题,但是当出现雨、雪、雾以及黑夜时,视频很难很好的工作,特别是当需要监控的距离较远,例如1Km以上时,视频监控设备需要很多部,并且野外工作组网困难,也存在也易受到破坏,供电、通信线缆铺设施工量大,使用维护成本较高等问题。
本方案中地面监测雷达,即多普勒雷达,其利用多普勒效应进行定位,测速,测距等工作。
其工作原理可表述如下:当雷达发射一固定频率的脉冲波对空扫描时,如遇到活动目标,回波的频率与发射波的频率出现频率差,称为多普勒频率。
根据多普勒频率的大小,可测出目标对雷达的径向相对运动速度;根据发射脉冲和接收的时间差,可以测出目标的距离。
5.4__雷达终端显示器和录取

一、雷达终端显示器 功用:
用来显示雷达所获取的目标信息和
情报,显示的内容包括目标的位置及其
运动情况,目标的各种特征数等。
(一)显示器的类型
1、距离显示器 A型显示器、J型显示器、A/R型显示器 2、平面显示器 平面显示器(PPI) 偏心PPI显示器 B式显示器 3、高度显示器 4、综合显示器
(四)目标距离数据的录取
若计数脉冲频率为f,距离取样间隔 τR=1/f,由读出的距离数码N,可确定目 标延迟时间tR和目标的距离R: tR≈NτR R=c tR /2≈cNτR/2
结论:
利用计数器将时间的长短转换成 二进制数码,由目标迟后于发射脉 冲的延迟时间tR来决定计数时间的长 短,使计数器中所计的数码正比与tR, 读出计数器中的数,就可以得到目 标的距离数据。
飞行数据处理器的功能包括:
① 国际航空电信电报数据的自动处理; ② 飞行计划数据输入、修改和分配,飞行 计划的生成; ③ 重复飞行计划数据库管理; ④ 改变航路; ⑤ 自动和人工二次雷达代码管理和分配;
⑥ 自动激活和飞行计划期限管理,路径处 理、航路的输入和更新,航路变换,处 理更新的固定点及航线,冲突检测等, 飞行进程单及文件式飞行数据图形显示; ⑦ 天气数据的输入和修正; ⑧ 飞行进程列表; ⑨ 飞行进程单自动分配打印和显示; ⑩ 飞行数据的统计和累加。
5、计算机图形显示
计算机图形显示系统组成框图
计算机
信号控制、处 理、存储电路 显示读 出装置 可见数据
管制员
计算机通信装置
操作动作
计算机: 完成雷达系统的计算处理工作,将各种输入 数据加工整理成显示档案并送往信号控制、处 理、存储电路进行图形处理。
第四章雷达终端显示器和录取设备

20km
仰 角
0km 200km
0km
斜距
E式
RHI
高度显示器的两种型式
Radar principles
情况显示器和综合显示器
安装在作战指挥室和空中导航管制中心的自主式显示装 置。它在数字式平面位置显示器上提供一幅空中态势的 综合图像。雷达图像为一次信息,综合图像为二次信息, 包括表格数据、特征符号和地图背景。
300°
目标 3
移动距标: 一个相对主波延迟时间可调节的脉冲。
Radar principles
A型显示器的原理框图
推挽式锯齿波
X 扫描 重复周期 回波 锯齿波 工作 期 刻度 X 扫 描 辉亮 停止期 匿 影 辉亮信号 距离刻度 移动距标 探测脉冲
辉亮
栅极
移动距标
阴极
灯丝加热阴极
回波信号
(a ) (b ) 1. X,Y偏转板控制电子束的偏转 2. 栅极、阳极控制产生电子束,电压高低决定显示亮度
表格 V= 4 BF-9 2009 河流 桥梁
AF -16-3 AF -61-5 …… …… MF= 9 -5
目标 CF-3-9 9005
CF-07 13-32 跑道
闪光点
AF -16-37
距标
Radar principles
光栅扫描雷达显示器
数字式的光栅扫描雷达显示器与雷达中心计算机和显示 处理专用计算机构成一体,具有高亮度、高分辨率、多 功能、多显示格式和实时显示等优点,既能显示目标回 波的一次信息,也能显示各种二次信息以及背景地图。
平面显示器提供了 360度范围内全部 平面信息,所以也 叫全景显示器或环 视显示器,简称 PPI显示器或P显
《雷达原理与系统》PPT课件

W
G 发射天线增益
倍
Ar 接收天线有效面积(孔径)m2
工作波长 m
目标的雷达截面积 m2
R 雷达与目标之间的距离 m
Pr min 接收机灵敏度 W
未考虑因素:大气衰减与路径(多精径选,课件曲p率pt),目标特性与起伏
9
1.1 雷达的任务
举例:
某雷达发射脉冲功率为200KW,收发天线增益为30dB,波长0.1m,抗研究所 2014年2月
精选课件ppt
1
主要内容
1、绪论
2、雷达发射机
3、雷达接收机
4、雷达终端显示器与录取设备
5、雷达作用距离
6、目标距离的测量
7、目标角度的测量
8、目标速度的测量
精选课件ppt
2
主要内容
9、连续波雷达 10、脉冲多普勒雷达 11、相控阵雷达 12、数字阵列雷达 13、脉冲压缩雷达 14、双基地雷达 15、合成孔径雷达
收发信号载波频率的差(多卜勒频率)
举例:
fd
ttrt2Vr
2t
tr 2R0Vrt c
频率为10GHz的雷达,当目标径向速度为300m/s时,其多卜勒频率为
c f3 1 1 18 0 H m 0 0/s z0 .0m 3 ,fd2 0 3 .0m m 0 3 /s 0 2K 0Hz
精选课件ppt
8
灵敏度为-110dBm,不考虑大气损耗等,试求其对=1m2目标的最大作用
距离
1
Rm
ax
2
105 1032 0.12
4 3 1014
1
4
1
2 1023
4 3
4
100.786km
精选课件ppt
第4章 雷达终端显示器和录取设备

第 4 章 雷达终端显示器和录取设备
4.2.2 A/R显示器
在A型显示器上, 我们可以控制移动距标去对准目标回波, 然后根据控制元件的参量(电压或轴角)而算得目标的距离数据。 由于人的固有惯性, 在测量中不可能做到使移动距标完全和目 标重合, 它们之间总会有一定的误差Δl, 这个误差我们称为重合 误差。
第 4 章 雷达终端显示器和录取设备
发射脉 冲
近区地 物回波
目标回 波
0 10 20 30 40 50 60 70 80 90100 机械距离刻度
图 4.8 A型显示器画面
第 4 章 雷达终端显示器和录取设备
X 扫描
刻度 辉亮 移动距标
回波
X扫 描
重复周期
工作 期 停止期
辉亮
匿 影
(a)
(b)
图 4.9 A (a) 示波管各极波形; (b)波形时间关系
(3) 扫掠直线性好。要求锯齿电压波在工作期内电压变化 的速率接近一常数, 若这时采用均匀的固定距离刻度来测读, 则 可以得到较高的测距精度。
此外, 还要求扫掠电压有足够的锯齿电压幅度, 扫掠电压的 起点要稳定, 扫掠锯齿波的恢复期(即回程)尽可能地短。
第 4 章 雷达终端显示器和录取设备
2) 移动距标的产生 用移动距标测量目标距离, 就要设法产 生一个对主波延迟可变的脉冲作为距标。调节距标的延迟时间 (并能精确读出), 使距标移动到回波的位置上, 就可根据距标迟 后主波的时间tR算出目标的距离R(R=1/2ctR, 这里c为光速)。
如图4.12和图4.13所示, 以晶振频率为75 kHz的晶体振荡器 作为基准信号源①, 经5×6次分频后得到频率为2.5 kHz的正弦 信号②。用②去形成A扫掠线的触发信号⑤, 其重复周期相应为 60 km范围, 扫掠电压如⑥所示。
雷达终端显示器和录取设备
= f x′ = f y′
f cp 2 2
n
∆X ∆Y
f cp
n
f x′, f y′ :输出脉冲平均频率 n :数据位数 f cp :输入时钟脉冲频率 T0 :总的描绘时间
2n T0 = f cp
规划: a.xm、ym、Δxm、Δym 均为整数; b.限定画完一个矢量的总时间To ,fo=1/To; c.尽可能均匀的在To 时间内给原值(xm、ym)发出(Δxm、Δym)个增量脉冲 (每个脉冲的增量为1,计数产生)。x 方向的频率变化 fxm = fo ⋅Δxm,y方 向fym = fo ⋅Δym。
7
§4.2 距离显示器
§4.2.2 A/R显 为避免A显的重合误差,提高测距精度,引入A/R显,图4.11 起始时间变化 e. x. 4.1 已知 单枪静电偏 转示波管偏 转灵敏度 0.1cm/V , Rmax 对 应扫略线 长度 l=30cm,标尺系数m=5Km/cm,现保证全程测量,采用A/R显示方法,将 70Km~80km一段标尺系数扩大5倍,画出加于x偏转板、y偏转板上的偏转 信号和加于阴极上的辉亮信号,标明锯齿电压的斜率,对准时间关系。
• 距离坐标录取 • 角坐标录取 等信号法
雷达信号处理重点实验室 15
( km /cm )
l =SxVx = Rm m m= Rm l
斜距
电压
Sx
标尺 刻度
c Rm = T =150T 2
km ms
m
锯齿波斜率 k =
③下垂直偏转板
刻度频率 f ( Hz ) 单位刻度距离 ∆R ( km ) =
c1 1 =150 2 f f
雷达信号处理重点实验室
Vx (V /ms ) T
2023年大学_《雷达原理》第三版(丁鹭飞耿富录著)课后答案下载
2023年《雷达原理》第三版(丁鹭飞耿富录著)课后答案下载《雷达原理》第三版内容简介第1章绪论1.1 雷雷达传感器雷达传感器达的任务1.2 雷达的基本组成1.3 雷达的工作频率1.4 雷达的应用和发展1.5 电子战与军用雷达的发展主要参考文献第2章雷达发射机2.1 雷达发射机的任务和基本组成2.2 雷达发射机的主要质量指标2.3 单级振荡和主振放大式发射机2.4 固态发射机2.5 脉冲调制器主要参考文献第3章雷达接收机3.1 雷达接收机的组成和主要质量指标 3.2 接收机的'噪声系数和灵敏度3.3 雷达接收机的高频部分3.4 本机振荡器和自动频率控制3.5 接收机的动态范围和增益控制3.6 滤波和接收机带宽主要参考文献第4章雷达终端显示器和录取设备4.1 雷达终端显示器4.2 距离显示器4.3 平面位置显示器4.4 计算机图形显示4.5 雷达数据的录取4.6 综合显示器简介4.7 光栅扫描雷达显示器主要参考文献第5章雷达作用距离5.1 雷达方程5.2 最小可检测信号5.3 脉冲积累对检测性能的改善 5.4 目标截面积及其起伏特性 5.5 系统损耗5.6 传播过程中各种因素的影响 5.7 雷达方程的几种形式主要参考文献第6章目标距离的测量6.1 脉冲法测距6.2 调频法测距6.3 距离跟踪原理6.4 数字式自动测距器主要参考文献第7章角度测量7.1 概述7.2 测角方法及其比较7.3 天线波束的扫描方法7.4 三坐标雷达7.5 自动测角的原理和方法主要参考文献第8章运动目标检测及测速8.1 多卜勒效应及其在雷达中的应用8.2 动目标显示雷达的工作原理及主要组成 8.3 盲速、盲相的影响及其解决途径8.4 回波和杂波的频谱及动目标显示滤波器 8.5 动目标显示雷达的工作质量及质量指标 8.6 动目标检测(MTD)8.7 自适应动目标显示系统8.8 速度测量主要参考文献第9章高分辨力雷达9.1 高距离分辨力信号及其处理9.2 合成孔径雷达(SAR)9.3 逆合成孔径雷达(ISAR)9.4 阵列天线的角度高分辨力主要参考文献《雷达原理》第三版作品目录《雷达原理(第四版)》分为雷达主要分机及测量方法两大部分。
雷达原理复习总结

噪声系数、噪声温度的计算。 噪声系数:
器、信号处理器或由计算机控制的雷达终端设备中。
超外差接收机概念 将接收信号与本机振荡电路的振荡频率,经混频后得到一 个中频信号,这称为外差式接收。得到的中频信号再经中 频放大器放大的,称为超外差式。中频信号经检波后得到 视频信号。 接收机主要组成部分
式中, Si 为输入额定信号功率; Ni 为输入额定噪声功率 (Ni =kT0Bn); So 为输出额定信号功率; No 为输出额定噪 声功率。 噪声温度 NA=kTABn 3、匹配滤波
微电子化和模块化结构
瞬时自动增益控制
2、接收机的噪声系数(重点)
防止等幅波干扰、宽脉冲干扰和低频调幅波干扰等引起的
中频放大器过载。
近程增益控制
防止近程杂波干扰引起的中频放大器过载。
第四章
最大作用距离与各因素的关系
1、雷达终端显示器的的任务
雷达终端显示器用来显示ห้องสมุดไป่ตู้达所获得的目标信息和情报, 包括目标的位置及其运动情况,目标的各种特征参数等。 2、显示器的主要类型
雷达原理复习要点 第一章(重点)
3、目标角度的测量 方位分辨率取决于哪些因素
1、雷达的基本概念
雷达概念(Radar):
4、雷达的基本组成
radar 的音译,Radio Detection and Ranging 的缩写。 雷达由哪几个主要部分,各部分的功能是什么
无线电探测和测距,无线电定位。
同步设备:雷达整机工作的频率和时间标准。
向(正北、正南或其它参考方向)在水平面上的夹角。
电源
仰角β:斜距 R 与它在水平面上的投影 OB 在铅垂面上的 第二章
夹角,有时也称为倾角或高低角。
1、雷达发射机的任务
雷达原理电子教案 (4)

第 4 章 雷达终端显示器和录取设备
主波 回波 距离
主波 回波
回波 主波
(a)
(b)
(c)
图 4.1 (a)A型显示器; (b) J型显示器; (c) A/R显示器
2) 显示的坐标数量、种类和量程 这些参数主要根据雷达的 用途和战术指标来确定。
第 4 章 雷达终端显示器和录取设备
3) 对目标坐标的分辨力 这是指显示器画面上两个相邻目标 的分辨能力。光点的直径和形状将直接影响对目标的分辨力, 性 能良好的示波管的光点直径一般为0.3 ~0.5 mm。此外, 分辨力还 与目标距离远近天线波束的半功率宽度和雷达发射脉冲宽度等 参数有关。
第 4 章 雷达终端显示器和录取设备
仰角
高度
距离
距离
图 4.5 高度显示器的两种型式
第 4 章 雷达终端显示器和录取设备
4.
随着防空系统和航空管制系统要求的提高及数字技术在雷 达中的广泛应用, 出现了由计算机和微处理机控制的情况显示器 和综合显示器。情况显示器和综合显示器是安装在作战指挥室 和空中导航管制中心的自主式显示装置, 它在数字式平面位置显 示器上提供一幅空中态势的综合图像, 并可在综合图像之上叠加 雷达图像。图4.6示出综合显示器的画面, 其中雷达图像为一次 信息, 综合图像为二次显示信息, 包括表格数据、 特征符号和地 图背景, 例如河流、 跑道、 桥梁及建筑物等。
第 4 章 雷达终端显示器和录取设备
2.
平面显示器显示雷达目标的斜距和方位两个坐标, 是二维 显示器。 它用平面上的亮点位置来表示目标的坐标, 属亮度调 制显示器。
雷达原理4-显示器

混合
回波信号 视放
方位 刻度
天线方位
图 4.15 动圈式平面显示器方框
随动 系统
天线方位
第 4 章 雷达终端显示器和录取设备 1. u(t)Ld(ti)R(t)iL K R(t)i dt
i(t)
i(t)=Kt
Im
u(t)C0
L u(t)=LK+Ri(t)
RIm R
LK
(a)
(b)
图 4.16 (a) 线圈等效电路; (b) 电流、电压波形
第 4 章 雷达终端显示器和录取设备
4.4 计算机图形显示
4.4.1 计算机图形显示系统
计算机
信号控制、处 理、存储电路
显示读 出装置
计算机 通信装 置
操作员
第 4 章 雷达终端显示器和录取设备
4.5 雷达数据的录取
4.5.1 雷达系统对雷达信息处理的过程主要有以下三点: (1) 从雷达接收机的输出中检测目标回波, 判定目标的存在; (2) 测量并录取目标的坐标; (3) 录取目标的其它参数, 如机型、架数、国籍、发现时间
第 4 章 雷达终端显示器和录取设备
雷达原理4-显示器
第 4 章 雷达终端显示器和录取设备
第 4 章 雷达终端显示器和录取设备
第 4 章 雷达终端显示器和录取设备
第 4 章 雷达终端显示器和录取设备
4.1 雷达终端显示器
任务: 显示雷达所获取的目标信息
4.1.1 显示器的主要类型 雷达终端显示器根据完成的任务可分为: 距离显示器、 平
目标回 波
0 10 20 30 40 50 60 70 80 90100 机械距离刻度
图 4.8 A型显示器画面
第 4 章 雷达终端显示器和录取设备
(完整版)雷达组成及原理

雷达的组成及其原理课程名称:现代阵列并行信号处理技术姓名:***学号:*************教师:王文钦教授一.简介雷达(Radar,即radio detecting and ranging),意为无线电搜索和测距。
它是运用各种无线电定位方法,探测、识别各种目标,测定目标坐标和其它情报的装置。
在现代军事和生产中,雷达的作用越来越显示其重要性,特别是第二次世界大战,英国空军和纳粹德国空军的“不列颠”空战,使雷达的重要性显露的非常清楚。
雷达由天线系统、发射装置、接收装置、防干扰设备、显示器、信号处理器、电源等组成。
其中,天线是雷达实现大空域、多功能、多目标的技术关键之一;信号处理器是雷达具有多功能能力的核心组件之雷达种类很多,可按多种方法分类:(1)按定位方法可分为:有源雷达、半有源雷达和无源雷达。
(2)按装设地点可分为;地面雷达、舰载雷达、航空雷达、卫星雷达等。
(3)按辐射种类可分为:脉冲雷达和连续波雷达。
(4)按工作被长波段可分:米波雷达、分米波雷达、厘米波雷达和其它波段雷达。
(5)按用途可分为:目标探测雷达、侦察雷达、武器控制雷达、飞行保障雷达、气象雷达、导航雷达等。
二. 雷达的组成(一)概述1、天线:辐射能量和接收回波(单基地脉冲雷达),(天线形状,波束形状,扫描方式)。
2、收发开关:收发隔离。
3、发射机:直接振荡式(如磁控管振荡器),功率放大式(如主振放大式),(稳定,产生复杂波形,可相参处理)。
4、接收机:超外差,高频放大,混频,中频放大,检波,视频放大等。
(接收机部分也进行一些信号处理,如匹配滤波等),接收机中的检波器通常是包络检波,对于多普勒处理则采用相位检波器。
5、信号处理:消除不需要的信号及干扰而通过或加强由目标产生的回波信号,通常在检测判决之前完成(MTI,多普勒滤波器组,脉冲压缩),许多现代雷达也在检测判决之后完成。
6、显示器(终端):原始视频,或经过处理的信息。
7、同步设备(视频综合器):是雷达机的频率和时间标准(只有功率放大式(主振放大式)才有)。
LabVolt系列雷达处理器 显示器(基本雷达培训系统的附加设备)数据手册说明书
LabVolt Series DatasheetRadar Processor/Display (add-on to the Basic Radar Training System)8112498 (8097-20)* The product images shown in this document are for illustration purposes; actual products may vary. Please refer to the Specifications section of each product/item for all details. Festo Didactic reserves the right to change product images and specifications at any time without notice.Festo Didactic en12/2023Radar Processor/Display (add-on to the Basic Radar Training System), LabVolt SeriesTable of ContentsGeneral Description_________________________________________________________________________________3 List of Equipment___________________________________________________________________________________8 List of Manuals____________________________________________________________________________________8 Table of Contents of the Manual(s)____________________________________________________________________8 Additional Equipment Required to Perform the Exercises (Purchased separately) _____________________________9 System Specifications_______________________________________________________________________________9 Equipment Description_____________________________________________________________________________10 Optional Equipment Description_____________________________________________________________________14Radar Processor/Display (add-on to the Basic Radar Training System), LabVolt SeriesGeneral DescriptionThe Radar Processor/Display is used in conjunction with the Basic Radar Training System to form a complete and modern pulse radar system. The Radar Processor/Display adds the following elements to the Basic Radar Training System: radar echo signal processing functions, PPI display functions, on-screen block diagrams of the complete radar and radar processor/display subsystem, and computer-based (i.e., on-screen) instruments (oscilloscope and data monitoring system). Two major types of radar echo signal processing function areavailable: Moving Target Indication (MTI) and Moving Target Detection (MTD). The Radar Processor/Display also provides computer-controlled generation of clutter and interference to allow study of the MTI processingfunction. The following types of clutter and interference can be generated: sea clutter, rain clutter, second-trace echo, noise, and pulse interference.The Radar Processor/Display consists of a reconfigurable training module (RTM), a power supply for the RTM, three interface modules, a set of accessories including the Radar Training System Software, two comprehensive student manuals, and a user guide. A Windows ® based host computer (to be purchased separately) is requiredwith the RTM. The Festo Radar Host Computer is recommended.Example of a PPI display obtained with the Radar Processor/Display.The RTM is the cornerstone of theRadar Processor/Display. This module, which uses state-of-the-art digitalsignal processor (DSP) technology, can be programmed to act as either an analog pulse radar (i.e., a pulse radar with MTI processing) or a digital pulse radar (i.e., a pulse radar using MTD, correlation and interpolation, and surveillance processing). Interface modules that students install in the RTM allow connection of the various signals coming from the Basic Radar Training System, as shown in Figure 1. The RTM can also be programmed to act as a tracking radar when used with the Radar Tracking Training System,Model 8096-3.Radar Processor/Display (add-on to the Basic Radar Training System), LabVolt Series•••••••••Figure 1. Simplified connection diagram of the Basic Radar Training System and Radar Processor/Display.The RTM processes the signals from the Basic Radar Training System to detect targets, and sends data to the radar host computer via a high-speed data link (Ethernet link with TCP/IP protocol). The RTM can also generate clutter and interference which are added to the I- and Q-channel echo signals from the radar receiver, before signal processing takes place. The radar host computer, which runs the LVRTS software, uses the dataproduced by the RTM to display the detected targets on a PPI display. TheLVRTS software is a Windows ®-basedapplication used to download programs into the DSP memory of theRTM, to select the type of radar which is implemented (see Figure 2). It also has an intuitive user interface to:Select the radar processing functions and adjust other parameters of the radar, such as the video gain, detection threshold, etc. (see Figure 3)Control the radar display functions such as the PPI display mode selection, Variable Range Marker (VRM), Electronic Bearing Line (EBL), etc. (see Figure 4)Display diagrams that show how to connect the equipment (see Figure 5).Display the functional block diagrams of the complete radar and radar processor/display subsystem (see Figure 6).Connect virtual probes to test points in the aforementioned block diagrams to observe real signals using the built-in oscilloscope (see Figure 7).Use the Data Monitor to observe and analyze the signal processing sequence involved in Moving Target Detection (see Figure 8).Insert faults in the system (password-protected feature) for troubleshooting purposes (see Figure 9).Set the parameters that control the generation of clutter and interference (see Figure 10).Obtain on-line help screens (see Figure 11).Figure 2. On-screen selection of the type of radar which is implemented.Radar Processor/Display (add-on to the Basic Radar Training System), LabVolt SeriesFigure 3. Computer-based control of the radar processing functions and operating parameters.Figure 4. Computer-based control of the radar display functions.Radar Processor/Display (add-on to the Basic Radar Training System), LabVolt SeriesFigure 5. Window showing the interconnections to the RTM.Figure 6. On-screen block diagram of the Moving Target Indicator (MTI)processor.Figure 7. Real signals can be observed on the built-in oscilloscope byconnecting virtual probes to test points in the on-screen block diagrams.Radar Processor/Display (add-on to the Basic Radar Training System), LabVolt SeriesFigure 8. The Data Monitor is a powerful tool designed to study the various stages (FFT Doppler filtering, thresholding, alarm generation) of Moving Target Detection (MTD).Figure 9. Faults window in the LVRTS software.Figure 10. Computer-based control of clutter and interference generation.Radar Processor/Display (add-on to the Basic Radar Training System), LabVolt Series••••••••List of EquipmentQty Description Model number1Analog MTI Processing (Student Manual) ___________________________________________ 580412 (38543-00)1Radar Processor/Display (User Guide) _____________________________________________ 580414 (38543-E0)1Digital MTD Processing (Student Manual) ___________________________________________ 580418 (38544-00)1RTM Power Supply _____________________________________________________________ 8112514 (9408-2X)1Reconfigurable Training Module (RTM) _____________________________________________ 8094635 (9431-30)1Analog/Digital Signal Combiner ___________________________________________________ 8112776 (9630-10)1Data Acquisition Interface _______________________________________________________ 8112777 (9631-10)1Radar Analog/Digital Output Interface _____________________________________________ 8093433 (9635-00)1Accessories for the Radar Processor/Display ________________________________________ 8112516 (9688-A0)List of ManualsDescriptionManual numberAnalog MTI Processing (Workbook) ___________________________________________________580412 (38543-00)Radar Processor/Display (User Guide) _________________________________________________580414 (38543-E0)Digital MTD Processing (Workbook) __________________________________________________580418 (38544-00)Radar Training System (User Guide) ___________________________________________________________8112390Table of Contents of the Manual(s)Analog MTI Processing (Workbook) (580412 (38543-00))1-1 Familiarization with the Analog Pulse Radar 1-2 The PPI Display 2-1 Phase-Processing MTI 2-2 Vector-Processing MTI 2-3 Staggered PRF 2-4 MTI Limitations 3-1 Threshold Detection3-2 Pulse IntegrationFigure 11. On-line help screens are available through a few clicks of the mouse button.Radar Processor/Display (add-on to the Basic Radar Training System), LabVolt Series•••••••••••••••3-3 Sensitivity Time Control3-4 Instantaneous Automatic Gain Control 3-5 The Log-FTC Receiver3-6 Constant False-Alarm Rate4-1 Troubleshooting the MTI Processor4-2 Troubleshooting the Display Processor 4-3 Troubleshooting an MTI Radar SystemDigital MTD Processing (Workbook) (580418 (38544-00))1-1 Familiarization with the Digital Pulse Radar1-2 The PPI Display2-1 Cell Mapping2-2 Fast Fourier Transform (FFT) Processing2-3 Constant False-Alarm Rate (CFAR)3-1 Correlation and Interpolation (CI) Processing3-2 Surveillance (Track-While-Scan) Processing4-1 Troubleshooting the Digital MTD/PPI ProcessorAdditional Equipment Required to Perform the Exercises (Purchased separately)Qty Description Model number1Function Generator 5 MHz / Frequency Counter ______________________________________ 8125246 (9409-00) 1Radar Host Computer ___________________________________________________________ 587465 (9695-00)1System SpecificationsParameter ValueMTI Processor (Analog)Functions Functions Sensitivity Time Control (STC), moving target cancellation, logarithmic amplification, Fast Time Constant (FTC), Constant False-Alarm Rate (CFAR), Instantaneous Automatic Gain Control (IAGC), antilog conversion, 4- and 8-pulse video integration (non-coherent)I- and Q-Channel Input Voltage Range-1.5 to +1.5 VVideo Output Voltage Range-10 to +10 VOn-Screen Test Points15Faults12Display Processor (Analog)PPI Outputs X and Y, Voltage Range-8 to +8 VPPI Output Z TTLAzimuth Input TTLOn-Screen Test Points8Faults4MTD Processor (Digital)Functions Moving Target Detection (MTD), Correlation and Interpolation, Surveillance Coherent Processing Intervals (CPI)2, 4/3 ratio, synchronized in azimuthTarget Tracking Capability up to 8 targets simultaneouslyI- and Q-Channel Input Voltage Range-1.5 to +1.5 VPPI Outputs X and Y, Voltage Range-8 to +8 VPPI Output Z TTLAzimuth Input TTLOn-Screen Test Points15Faults13PPI Display (Digital)Number of Sectors60Sector Width6°1 Comes with the software pre-installed. Can be replaced by a PC running Windows with a Ethernet port and2 screens.Radar Processor/Display (add-on to the Basic Radar Training System), LabVolt SeriesParameter ValueNumber of Range Segments16, 32, and 64 on 1.8-m (5.9-ft), 3.6-m (11.8-ft), and 7.2-m (23.6-ft) ranges, respectivelyRange Segment Length11.25 cm (4.4 in)Number of Cells960, 1920, and 3840 on 1.8-m (5.9-ft), 3.6-m (11.8-ft), and 7.2-m (23.6-ft) range, respectively Equipment DescriptionRTM Power Supply8112514 (9408-2X)The RTM Power Supply is the power source for theReconfigurable Training Module (RTM) used in the radar trainingsystems. It has a multi-pin connector output, located on theback panel, that provide regulated dc voltages. Hiccup modeprotection protects the outputs of the RTM Power Supply againstshort-circuits.Front ViewRear ViewSpecificationsParameter ValuePower RequirementsService Installation Standard single-phase ac outletVoltage100-240 V acCurrent 2.5 AFrequency50/60 HzRating of DC Power Outputs+5 V 2 A+3.3 V 2.5 A+12 V - A 1.25 A+12 V - B 1.25 A-12 V0.85 A-5 V 1 APhysical CharacteristicsDimensions (H x W x D)165 x 250 x 250 mm (6.5 x 9.8 x 9.8 in)Net Weight 5.6 kg (12.2 lb)Reconfigurable Training Module (RTM)8094635 (9431-30)The Reconfigurable Training Module (RTM) consists mainly of apowerful digital signal processor (DSP), with three slots on themodule front panel for installing interface modules. An Ethernetport (RJ-45) connector, located on the back panel, allowsconnection of the RTM to the host computer. The functionality ofthe training system is determined by downloading a programinto the DSP memory using the host computer that runs thesoftware. Electrical power is supplied to the RTM by the PowerSupply, Model 9408, through a multipin cable that connects to the back panel.SpecificationsParameter ValueInterface Card SlotsAnalog/Digital2Digital1Data LinkData Link to Host Computer10 Mb/s (Ethernet) or 100 Mb/s (Fast Ethernet), TCP/IP ProtocolPhysical CharacteristicsDimensions (H x W x D)215 x 430 x 280 mm (8.5 x 16.9 x 11.0 in)Net Weight9.8 kg (21.6 lb)Analog/Digital Signal Combiner8112776 (9630-10)The Analog/Digital Signal Combiner is a compact moduledesigned to be installed into one of the slots on the RTM of theRadar Processor/Display. This module converts the clutter andinterference generated by the DSP of the RTM to analog format,and adds it to the I- and Q-channel echo signals coming from theRadar Receiver.The Analog/Digital Signal Combiner has two BNC-connectorinputs to receive the I- and Q-channel echo signals. It also hasfour BNC-connector outputs. Two outputs provide the clutter andinterference signals added to the I- and Q-channel echo signals.The other two outputs provide the I- and Q-channel, perturbedecho signals. All these inputs and outputs are protected frommisconnections within the system. Test points are available onthe module's front panel to observe all these signals using a conventional oscilloscope.DC power is automatically supplied to the Analog/Digital Signal Combiner when it is installed into the RTM. SpecificationsParameter ValueAnalog Inputs (2)Voltage Range-10 to +10 VImpedance10 kΩAnalog Outputs 3 and 4Voltage Range-1 to +1 VImpedance600 ΩAnalog Outputs 5 and 6Voltage Range-11 to +11 VImpedance600 ΩTests PointsTest Points6Physical CharacteristicsDimensions (H x W x D)114 x 110 x 209 mm (4.5 x 4.3 x 8.2 in)Net Weight0.6 kg (1.4 lb)Data Acquisition Interface8112777 (9631-10)The Data Acquisition Interface is a compact module designed tobe installed into one of the slots on the RTM of the RadarProcessor/Display. This module receives the I- and Q-channelecho signals of the radar, perturbed or not, and converts them todigital format. It also receives the PRF and synchronizationsignals as well as azimuth information from the RadarSynchronizer / Antenna Controller. All these signals are thenrouted to the RTM for digital signal processing.The Data Acquisition Interface has two BNC-connector analoginputs to receive the I- and Q-channel echo signals. It also hastwo BNC-connector digital inputs where the PRF andsynchronization signals are injected. A DB15 connector isprovided as a digital input for the azimuth information. All theseinputs are protected from misconnections within the system.Test points are available on the module's front panel to observe the input signals using a conventional oscilloscope.DC power is automatically supplied to the Data Acquisition Interface when it is installed into the RTM. SpecificationsParameter ValueAnalog Inputs (2)Voltage Range-1.5 to +1.5 VImpedance10 kΩDigital Inputs (2)Parallel Digital Input TTL, 10 bitsTest Points4Physical CharacteristicsDimensions (H x W x D)114 x 110 x 209 mm (4.5 x 4.3 x 8.2 in)Net Weight0.6 kg (1.4 lb)Radar Analog/Digital Output Interface8093433 (9635-00)The Analog/Digital Output Interface is a compact moduledesigned to be installed into one of the slots on the RTM of theRadar Processor/Display. This module provides analog anddigital output signals generated by the RTM. The nature of thesignals generated depends on the type of radar processing thatthe RTM performs.The Analog/Digital Output Interface has four BNC-connectoranalog outputs and four BNC-connector digital outputs. All theseoutputs are protected from misconnections within the system.Test points are available on the module's front panel to observethe output signals using a conventional oscilloscope.DC power is automatically supplied to the Analog/Digital OutputInterface when it is installed into the RTM.SpecificationsParameter ValueAnalog Outputs (4)Voltage Range-10 to +10 VImpedance600 ΩDigital Outputs (4)TTLTest Points8Physical CharacteristicsDimensions (H x W x D)114 x 110 x 209 mm (4.5 x 4.3 x 8.2 in)Net Weight0.6 kg (1.4 lb)Accessories for the Radar Processor/Display8112516 (9688-A0)The Accessories for the Radar Processor/Display contains aDB15 cable, a USB port cable, an RJ-45 connector crossovercable, an Ethernet adapter (network card) to be installed in theradar host computer, two semi-circular targets, a multiple targetholder to be used with the Target Positioning System and theLVRTS software CD-ROM.Optional Equipment DescriptionFunction Generator 5 MHz / Frequency Counter (Optional)8125246 (9409-00)Direct digital synthesized arbitrary function generator with anembedded frequency counter, perfect to complementtelecommunication or radar training systems.Radar Host Computer (Optional)587465 (9695-00)The Radar Host Computer is a Windows® based computer withthe LVRTS software installed, two monitors, and a dual-outputdisplay adapter (video card) compatible with Microsoft DirectX®version 9 or later.The Radar Host Computer is used to run the LVRTS software andis linked to the RTM of the Radar Processor/Display through ahigh-speed data link (Ethernet link with TCP/IP protocol). Itprovides the radar's PPI display and allows control of the radarprocessing and display functions, and much more as describedin the General Description of the Radar Processor/Display.The Radar Host Computer is not included in the Radar Processor/Display. It must be purchased separately or replaced with an equivalent personal computer. The Windows® 7 or later operating system is required to run the LVRTS software.Reflecting the commitment of Festo Didactic to high quality standards in product, design, development, production, installation, and service, our manufacturing and distribution facility has received the ISO 9001 certification.Festo Didactic reserves the right to make product improvements at any time and without notice and is not responsible for typographical errors. Festo Didactic recognizes all product names used herein as trademarks or registered trademarks of their respective holders. © Festo Didactic Inc. 2023. All rights reserved.Festo Didactic SERechbergstrasse 373770 DenkendorfGermanyP. +49(0)711/3467-0F. +49(0)711/347-54-88500Festo Didactic Inc.607 Industrial Way WestEatontown, NJ 07724United StatesP. +1-732-938-2000F. +1-732-774-8573Festo Didactic Ltée/Ltd675 rue du CarboneQuébec QC G2N 2K7CanadaP. +1-418-849-1000F. +1-418-849-1666。
雷达原理--第4章

雷达高显强度图说明:坐标原点为厦门气象台
四、综合显示器及常见画面
CUIT
CUIT
§4.2 距离显示器
A型显示器组成框图及显示原理
方 脉冲触发 波 锯齿电压 形成电路 差 分 放大器 产生器
振 铃 电 路
限 幅 放 大
刻 度 形 成 视 频
放大器 辉亮放大 移动距标 形 成 雷达回波
CUIT
CUIT
J型显示器 A/R型显示器
CUIT
二、平面显示器及常见画面
二维显示器:同时显示雷达目标斜 距和方位
200km
0km 0 90
平面显示器 (PPI显示器)
B式显示器
雷 达 平 面 显 示 图 示 例
雷达图说明:中心点为厦门(气象台),每距离圈60公里,可覆盖300公里范围。 PPI-平面强度图:可以想象为从空中俯视地面时所看到的云的分布情况。 仰角:雷达天线扫描线与地面的夹角。 DBZ:雷达回波的强度值,数值越大,强度越强,反映在现象上雨越大。 距离:指总距离圈为300公里。
在现代战争中,雷达的目标经常是多方 向多批次和高速度的。因此,录取方法 目前分为半自动录取和全自动录取。
CUIT
二、全自动录取
接收机 输出
信号 检测
发现
距离 编码
排队 控制
缓冲 储存
计算机
方位 编码
其他参数
时间 编码
同步控制
时序脉冲 产 生 器
到各部件
CUIT
§4.6
综合显示器简介
综合显示器能以半自动或全自动方式录 取目标的坐标数据,能显示雷达的原始 信息和二次信息。它的一个重要特点是 能显示来自地图产生器的地图背景和若 干表格数据。它能灵活地把一次信息二 次信息地图背景和各种表格数据等综合 在同一个显示器画面上进行显示,形象 地提供雷达威力范围内比较全面的综合 信息。
电子对抗原理_3_雷达系统结构_信号处理
FPGA #B Virtex-7
V585T -1FF1761I
EMIF INT
NOR FLASH
1Gb
DSP #A TMS320C6678
SRIO SRIO
4X
4X
HyperLink
S6
LX9
DDRIII
SDRAM
PLL
ARM
128MX64
DSP #B TMS320C6678
DDRIII SDRAM 128MX64
通信系统最常用的中频是70MHz
7
接收机噪声
雷达接收机噪声的来源主要分为两种: 内部噪声 外部噪声
内部噪声主要由接收机中的馈线、放电保护器、 高频放大器或混频器等产生。接收机内部噪声 在时间上是连续的,而振幅和相位是随机的, 通常称为“起伏噪声”。
外部噪声是由雷达天线进入接收机的各种人为 干扰、天电干扰、工业干扰、宇宙干扰和天线 热噪声等,其中以天线热噪声影响最大。
B型,距离—方位显示器,水平方向表示方位, 垂直方向表示距离
E型 ,距离—仰角显示器, P型 ,环视显示器,也称平面位置显示器
(PPI),其距离由径向距离表示, J型 ,圆周扫描的距离显示器
27
A型和A/R型
B型
器
距离-时间 窗
高度-时间 窗
目标三维 显示窗
14
5 信号处理机
雷达信号处理流程 信号处理机结构 信号处理机指标
15
5.1 雷达信号处理流程
雷达信号处理机的任务是对感兴趣的目标 信号进行检测并提取出目标参数(距离、 方位角、高低角、径向速度等)
A/D
脉冲 压缩
滤波
CFAR 处理
目标参数 提取
16
船用雷达终端显示系统

第10章船用雷达终端显示器10.1 概述雷达接收机将天线受到的微弱目标经高频放大、混频、中频放大、检波极信号处理后,尚需提取回波中的目标信息,再在经必要的加工后直观显示于显示器上,此过程由雷达终端来实现。
现代雷达终端显示的基本内容含:目标数据的录取、数据处理及目标航行状态的显示的典型组成框图如图10-1所示。
图10-1 船用雷达终端的典型组成简框图0-1中,“目标录取”用于实现对来自雷达录取机的雷达目标回波存在的确认,并提取目标的方位、距离、航速等信息:“数据处理”完成目标数据的关联、航迹处理、数据滤波跟踪;方位角编码完成天线瞬间方位角数据的提取机其极坐标转换成直角平面坐标,“显示系统”完成目标的位置、运动状态及其它信息的显示。
10.2 船用雷达显示器件船用雷达终端显示器采用的显示器件有两大类;磁偏转阴极射线管﹙CRT﹚和液晶显示器﹙LCD﹚,终端显示器有多种扫描方式工作:对传统船用雷达CRT显示器,常采用径向园扫描方式;对现代船用雷达LCD显示器,常采用光栅扫描显示方式。
按照需要显示的信息类型,可分为“一次信息”和“二次信息”显示。
10.2.1 阴极射线管CRT(Cathode Ray Tube)船用雷达要求使用具有余辉、亮度大、聚焦好、屏面尺寸大及磁偏转的CRT,以适应在宽阔海域中能得到较好的图像分辨力、清晰度及亮度画面的观测要求。
雷达显示器常用的CRT有三类:静电式:电子束聚焦,由管内极板间静电场完成电子束偏转,简言静电聚焦、静电偏转CRT,常用于军用A型显示器,也常见于实验室的普通示波管;磁式:电子束的聚焦与偏转均由装在管颈外的线圈流入电流产生的磁场完成,传统船用雷达常用;混合式:静电聚焦、磁偏转,因其具有供电方便、消耗功率小、结构简单、偏转灵敏度高等诸如优点。
船用雷达常被广泛采用的是混合式CRT。
1.CRT构成原理1)单色混合式CRT其构成如图10-2所示。
图10—2 单色混合式CRT结构图10-3 彩色CRT的结构示意图由图可见,混合式CRT由玻璃外壳、电子枪、荧光屏三大部分构成,工作时外加偏转线圈,形成偏转系统。
2024年一级建造师之一建民航机场工程实务题库附答案(典型题)

2024年一级建造师之一建民航机场工程实务题库附答案(典型题)单选题(共180题)1、滑行道桥宽度与桥外滑行道宽度相比较,滑行道桥宽度()的宽度。
A.必须大于桥外滑行道B.必须等于桥外滑行道C.应等于桥外滑行道加道肩D.应不小于桥外滑行道【答案】 D2、支线布线子系统的电缆长度应为( )m以内。
A.60B.70C.80D.90【答案】 D3、机场泛光照明灯具的灯端电压应满足的条件是()。
A.不大于额定电压的110%B.不大于额定电压的105%C.不小于额定电压的80%D.不小于额定电压的85%【答案】 B4、气象自动观测系统中的云高仪安装在()内,且避开航空器起降航线的地方。
A.中指点标台B.下滑台C.航向台D.外指点标台【答案】 A5、在机场土石方施工中对可能产生的滑坡,应采取排水、支挡、()、反压等处理措施。
A.填筑B.卸载C.强夯D.置换【答案】 B6、飞机离场手续由()来办理。
A.空中交通服务报告室B.塔台管制室C.管理局调制室D.区域管制中心【答案】 A7、机场中风斗的标志采用色带形式,色带由橙色与()相间的颜色组成。
A.白色B.蓝色C.绿色D.红色【答案】 A8、沥青混合料运至摊铺地点后,应有专人接收运料单并检查温度与()。
A.含水量B.集料硬度C.稳定度D.拌合质量【答案】 D9、多点定位系统的探测范围,受()限制。
A.能见度B.温度C.精度D.视距【答案】 D10、由无威胁因素引发的探测器的不正确报警率,被定义为该探测器的()。
A.漏报率B.探测概率C.误报率D.错报率【答案】 C11、机场仅一条跑道,其磁方向角度为145°~325°,则该跑道东南端标志为()。
A. 14B. 15C. 32D. 33【答案】 D12、下列工程中不属于民航专业工程的是()。
A.航站楼土建工程B.货运站工艺流程设计C.飞行区消防管网工程D.飞行区供电工程【答案】 A13、衰减串扰比是双绞线的重要技术指标,有时也用()来表示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
把电信号转换成光信号。
计算机通信装置(输入设备)
常用的有键盘、光笔、跟踪球、鼠标等 。
(二)对显示器的要求
1、显示器的类型选择 2、显示的坐标数量、种类和量程 3、目标坐标的分辨力 4、显示器的对比度
对比度=(图像亮度-背景亮度)/背景亮度× 100﹪
一般要求在200﹪ 以上。 5、图像重显频率 6、显示图像的失真和误差
多雷达数据处理功能包括:
(1) 航迹初始化、航迹相关、航迹预测、航迹平滑、航迹 外推和航迹终止;
(2) 自动方式下的代码和呼号相关; (3) 雷达数据块的处理,从一次雷达中获取气象数据的处
理和气象图形显示,二次雷达的数据处理,代码滤波 和代码的管理,大气压力变换; (4) 移交和交接; (5) 系统投影显示; (6) 自动最低安全告警;
目前的录取分半自动录取和全自动录 取。
(二)半自动录取
1、方框图
接收机 输出
录取显示器
编码器
输出
管制员
其他参数
2、工作:
目标仍然由人工通过显示器发现, 然后由人工操纵一套录取设备,利用编 码器把目标的坐标记录下来。
3、精度:
方位精度:1度 距离精度:1KM 延迟时间:3-5秒
(三)全自动录取
1、工作
3.4 雷达终端显示器和录取设备
一、雷达终端显示器 功用:
用来显示雷达所获取的目标信息和 情报,显示的内容包括目标的位置及其 运动情况,目标的各种特征参数等。
(一)显示器的类型
1、距离显示器 A型显示器、J型显示器、A/R型显示器
2、平面显示器 平面显示器(PPI) 偏心PPI显示器 B式显示器
3、高度显示器 4、综合显示器
飞行数据处理器的功能包括:
① 国际航空电信电报数据的自动处理; ② 飞行计划数据输入、修改和分配,飞行
计划的生成; ③ 重复飞行计划数据库管理; ④ 改变航路; ⑤ 自动和人工二次雷达代码管理和分配;
⑥ 自动激活和飞行计划期限管理,路径处 理、航路的输入和更新,航路变换,处 理更新的固定点及航线,冲突检测等, 飞行进程单及文件式飞行数据图形显示;
二、雷达数据的录取
雷达系统对雷达信息处理的过 程主要包括:
从雷达接收机的输出中检测目标回波, 判定目标的存在;
测量并录取目标的坐标; 录取目标的其他参数,如机型、架数、
国籍、发现时间等,并对目标进行编批。
(一)录取设备的发展:
早期的雷达终端设备,以P型显示器 为主,全部的录取工作由管制员人工完 成。管制员通过观察显示器的画面来发 现目标,并利用显示器上的距离和方位 刻度,测读目标的坐标,估算目标的速 度和航向,熟练的管制员还可以从画面 上判别出目标的类型和数目。
Hale Waihona Puke (五)目标角坐标数据录取等信号法 检测器在检测中发出三个信号:
回波串的起始(方位为θ1) 回波串的中止(方位为θ2) 发现目标θ 目标的方位中心估计值:
θ0=(θ1+θ2)/2
(六)综合显示器
显示内容:
一次雷达信息图形信息,数据处理系统的二 次信息;包括用矢量描绘的背景地图和在屏上 任意位置用表格显示详细给出的目标属性参量。 光点直径在0.3mm以下,分辨力很高; 书写时间快,平均书写时间仅2.5us,满屏书 写时间45us; 目标坐标数据采用自动方式录取,在天线环扫 一周内可录取高达400批目标坐标数据。
5、计算机图形显示
计算机图形显示系统组成框图
计算机
信号控制、处 理、存储电路
显示读 出装置
管制员
可见数据
计算机通信装置
操作动作
计算机:
完成雷达系统的计算处理工作,将各种输入 数据加工整理成显示档案并送往信号控制、处 理、存储电路进行图形处理。
信号控制、处理存储电路
把计算机送来的数据处理成能驱动显示读出 装置按规定要求动作的信号,以便显示出图形 和文字。
二. 功能
多雷达航迹处理能力和数据处理 多雷达航迹处理能力包括:
① 跟踪非离散的二次雷达 A/C 模式代码; ② 跟踪机场终端区和航路飞行的 A/C 模式代码; ③ 跟踪机动或非机动变速飞行的 A/C 模式代码; ④ 在不同角度上跟踪交叉飞行的A/C模式代码; ⑤ 跟踪一次雷达的航迹并可人工设置代码
(7) 自动冲突告警;
(8)自动闯入禁区告警;
(9) 自动偏离航路告警;
(10) 紧急情况、无线电失效、劫机、特殊 识别码(SPI)与飞行数据自动相关并告 警;
(11)管制扇区的重新定义、划分和组合;
(12)悬挂到达/起飞的飞行数据列表,数据 记录和重演,高度层过滤和显示;
(13)全系统航迹显示方式,单雷达航迹显示 方式或旁路显示方式。
在整个录取过程中,从发现目标到各个坐 标读出,完全由录取设备完成,只是某些辅助 参数需要人工进行录取。
2、特点
录取容量大、速度快、精度高,适用于全 自动防空系统和空中交通管制系统的要求。
3、精度
天线扫掠一周,可以录取30批目标,录取 的精度和分辨力不低于雷达本身的技术指标(距 离100米、方位精度可达0.1度)
北京首都机场的雷达终端系统
一. 组成
雷达前置处理器、 双冗余的雷达数据处理机(RDP)、 双冗余的飞行数据处理机(FDP)、 双冗余的数据记录设备(DRF)、 旁路雷达数据处理机(DRA)、 数据库管理系统(DMS)、 控制和显示器(CMD), 由管制员工作站和飞行数据工作站组成管制 席位(包括区域、进近和塔台席位)。
⑦ 天气数据的输入和修正;
⑧ 飞行进程列表;
⑨ 飞行进程单自动分配打印和显示;
⑩ 飞行数据的统计和累加。
返回
返回
距离扫掠线
方位刻度
返回
返回
信号 检测
距离编码 方位编码 时间编码
排队控制
某些现代化的空中交通管制雷达录取的目 标数量大大超过了30批,可达到400批。
(四)目标距离数据的录取
若计数脉冲频率为f,距离取样间隔 τR=1/f,由读出的距离数码N,可确定目 标延迟时间tR和目标的距离R: tR≈NτR R=c tR /2≈cNτR/2
结论:
利用计数器将时间的长短转换成 二进制数码,由目标迟后于发射脉 冲的延迟时间tR来决定计数时间的长 短,使计数器中所计的数码正比与tR, 读出计数器中的数,就可以得到目 标的距离数据。