midas02_Before_GS
华为调试
#interface Ethernet0/0/6#interface Ethernet0/0/7#interface GigabitEthernet0/0/0ip address 192.168.1.1 255.255.255.0#interface GigabitEthernet0/0/1ip address 218.24.164.213 255.255.255.0 nat outbound 2000#wlan#interface Wlan-Radio0/0/0#interface Cellular0/0/0link-protocol ppp#interface Cellular0/0/1link-protocol ppp#interface NULL0#ip route-static 0.0.0.0 0.0.0.0 218.24.164.1 #user-interface con 0user-interface vty 0 4user-interface vty 16 20#return[Huawei-GigabitEthernet0/0/1]nat ser pro tcp glo 218.24.164.213 www in 192.168.1 .200 8080Error: The address conflicts with interface or ARP IP.[Huawei-GigabitEthernet0/0/1]di th[V200R001C01]#interface GigabitEthernet0/0/1ip address 218.24.164.213 255.255.255.0nat outbound 2000#return[Huawei-GigabitEthernet0/0/1]undo nat ou 2000[Huawei-GigabitEthernet0/0/1]nat ser pro tcp glo 218.24.164.213 www in 192.168.1 .200 8080Error: The address conflicts with interface or ARP IP.[Huawei-GigabitEthernet0/0/1][Huawei-GigabitEthernet0/0/1]di th[V200R001C01]#interface GigabitEthernet0/0/1ip address 218.24.164.213 255.255.255.0#return[Huawei-GigabitEthernet0/0/1]nat ou 2000 ?address-group IP address-group of NATinterface Specify the interface<cr> Please press ENTER to execute command[Huawei-GigabitEthernet0/0/1]nat ou 2000 ad[Huawei-GigabitEthernet0/0/1]nat ou 2000 address-group 1Error: The address conflicts with interface or ARP IP. [Huawei-GigabitEthernet0/0/1]di cu[V200R001C01]#snmp-agent local-engineid 800007DB034C1FCC45D3A6 snmp-agent#voice#http server enable#drop illegal-mac alarm#dhcp enable#set transceiver-monitoring disable#acl number 2000rule 0 permit source 192.168.1.0 0.0.0.255rule 1 deny#aaaauthentication-scheme defaultauthorization-scheme defaultaccounting-scheme defaultdomain default[Huawei-GigabitEthernet0/0/1][Huawei-GigabitEthernet0/0/1][Huawei-GigabitEthernet0/0/1][Huawei-GigabitEthernet0/0/1]qu[Huawei]acl 2000[Huawei-acl-basic-2000]di th[V200R001C01]#acl number 2000rule 0 permit source 192.168.1.0 0.0.0.255rule 1 deny#return[Huawei-acl-basic-2000]undo rule 0[Huawei-acl-basic-2000]undo rule 1[Huawei-acl-basic-2000]rule permi ?fragment Check fragment packetnone-first-fragment Check the subsequence fragment packet source Specify source addresstime-range Specify a special timevpn-instance Specify a VPN-Instance<cr> Please press ENTER to execute command [Huawei-acl-basic-2000]rule permi[Huawei-acl-basic-2000]qu[Huawei]int g0/0/1[Huawei-GigabitEthernet0/0/1]di th[V200R001C01]#interface GigabitEthernet0/0/1ip address 218.24.164.213 255.255.255.0#return[Huawei-GigabitEthernet0/0/1]nat ou[Huawei-GigabitEthernet0/0/1]nat outbound 2000 add 1Error: The address conflicts with interface or ARP IP.[Huawei-GigabitEthernet0/0/1]qu[Huawei]acl 2000[Huawei-acl-basic-2000]di th[V200R001C01]#acl number 2000rule 5 permit#return[Huawei-acl-basic-2000]undo rule 5[Huawei-acl-basic-2000]rule 0 per so[Huawei-acl-basic-2000]rule 0 per source ?IP_ADDR<X.X.X.X> Address of sourceany Any source[Huawei-acl-basic-2000]rule 0 per source 192.168.1.0 0.0.0.255 [Huawei-acl-basic-2000]rule 1 de^Error:Ambiguous command found at '^' position.[Huawei-acl-basic-2000]di th[V200R001C01]#acl number 2000rule 0 permit source 192.168.1.0 0.0.0.255#return[Huawei-acl-basic-2000]rule 1 deny ?fragment Check fragment packetnone-first-fragment Check the subsequence fragment packetsource Specify source addresstime-range Specify a special timevpn-instance Specify a VPN-Instance<cr> Please press ENTER to execute command [Huawei-acl-basic-2000]rule 1 deny[Huawei-acl-basic-2000]di th[V200R001C01]#acl number 2000rule 0 permit source 192.168.1.0 0.0.0.255rule 1 deny#return[Huawei-acl-basic-2000]qu[Huawei]int g0/0/1[Huawei-GigabitEthernet0/0/1]di th[V200R001C01]#interface GigabitEthernet0/0/1ip address 218.24.164.213 255.255.255.0#return[Huawei-GigabitEthernet0/0/1]nat ou[Huawei-GigabitEthernet0/0/1]nat outbound 2000 ?address-group IP address-group of NATinterface Specify the interface<cr> Please press ENTER to execute command [Huawei-GigabitEthernet0/0/1]nat outbound 2000 ad 1Error: The address conflicts with interface or ARP IP.[Huawei-GigabitEthernet0/0/1]nat outbound 2000[Huawei-GigabitEthernet0/0/1]di th[V200R001C01]#interface GigabitEthernet0/0/1ip address 218.24.164.213 255.255.255.0nat outbound 2000#return[Huawei-GigabitEthernet0/0/1]dis nat ad[Huawei-GigabitEthernet0/0/1]qu[Huawei]dis nat ad 1NAT Address-Group Information:--------------------------------------Index Start-address End-address--------------------------------------1 218.24.164.213 218.24.164.213--------------------------------------Total : 1[Huawei]di cu[V200R001C01]#snmp-agent local-engineid 800007DB034C1FCC45D3A6 snmp-agent#voice#http server enable#drop illegal-mac alarm#dhcp enable#set transceiver-monitoring disable#acl number 2000rule 0 permit source 192.168.1.0 0.0.0.255rule 1 deny#aaaauthentication-scheme defaultauthorization-scheme defaultaccounting-scheme defaultdomain defaultdomain default_adminlocal-user admin password simple adminlocal-user admin service-type http#firewall zone trust#nat address-group 1 218.24.164.213 218.24.164.213 #interface Ethernet0/0/0#interface Ethernet0/0/1#interface Ethernet0/0/2#interface Ethernet0/0/3#interface Ethernet0/0/4#interface Ethernet0/0/5#interface Ethernet0/0/6#interface Ethernet0/0/7#interface GigabitEthernet0/0/0ip address 192.168.1.1 255.255.255.0#interface GigabitEthernet0/0/1ip address 218.24.164.213 255.255.255.0 nat outbound 2000#wlan#interface Wlan-Radio0/0/0#interface Cellular0/0/0link-protocol ppp#interface Cellular0/0/1link-protocol ppp#interface NULL0#ip route-static 0.0.0.0 0.0.0.0 218.24.164.1 #user-interface con 0user-interface vty 0 4user-interface vty 16 20#return[Huawei][Huawei]int g0/0/1[Huawei-GigabitEthernet0/0/1]di th[V200R001C01]#interface GigabitEthernet0/0/1ip address 218.24.164.213 255.255.255.0nat outbound 2000#return[Huawei-GigabitEthernet0/0/1]nat pro ?^Error: Unrecognized command found at '^' position.[Huawei-GigabitEthernet0/0/1]qu[Huawei]nat ?address-group IP address-group of NATalg Application level gatewaydns-map DNS mappingfilter-mode NAT filter modelink-down Link down reset session functionmapping-mode NAT mapping modeoverlap-address Overlap address pool to temp address pool map static Specify static NAT[Huawei]dis cu[V200R001C01]#snmp-agent local-engineid 800007DB034C1FCC45D3A6snmp-agent#voice#http server enable#drop illegal-mac alarm#dhcp enable#set transceiver-monitoring disable#acl number 2000rule 0 permit source 192.168.1.0 0.0.0.255rule 1 deny#aaaauthentication-scheme defaultauthorization-scheme defaultaccounting-scheme defaultdomain defaultdomain default_adminlocal-user admin password simple adminlocal-user admin service-type http#firewall zone trust#nat address-group 1 218.24.164.213 218.24.164.213 #interface Ethernet0/0/0#interface Ethernet0/0/1#interface Ethernet0/0/2#interface Ethernet0/0/3#interface Ethernet0/0/4#interface Ethernet0/0/5#interface Ethernet0/0/6#interface Ethernet0/0/7#interface GigabitEthernet0/0/0ip address 192.168.1.1 255.255.255.0#interface GigabitEthernet0/0/1ip address 218.24.164.213 255.255.255.0 nat outbound 2000#wlan#interface Wlan-Radio0/0/0#interface Cellular0/0/0link-protocol ppp#interface Cellular0/0/1link-protocol ppp#interface NULL0#ip route-static 0.0.0.0 0.0.0.0 218.24.164.1#user-interface con 0user-interface vty 0 4user-interface vty 16 20#return[Huawei]dis cu[V200R001C01]#snmp-agent local-engineid 800007DB034C1FCC45D3A6 snmp-agent#voice#http server enable#drop illegal-mac alarm#dhcp enable#set transceiver-monitoring disable#acl number 2000rule 0 permit source 192.168.1.0 0.0.0.255rule 1 denyaaaauthentication-scheme defaultauthorization-scheme defaultaccounting-scheme defaultdomain defaultdomain default_adminlocal-user admin password simple adminlocal-user admin service-type http#firewall zone trust#nat address-group 1 218.24.164.213 218.24.164.213 #interface Ethernet0/0/0#interface Ethernet0/0/1#interface Ethernet0/0/2#interface Ethernet0/0/3#interface Ethernet0/0/4#interface Ethernet0/0/5#interface Ethernet0/0/6#interface Ethernet0/0/7#[Huawei][Huawei]undo nat add 1[Huawei]nat ?address-group IP address-group of NATalg Application level gatewaydns-map DNS mappingfilter-mode NAT filter modelink-down Link down reset session functionmapping-mode NAT mapping modeoverlap-address Overlap address pool to temp address pool mapstatic Specify static NAT[Huawei]int g0/0/1[Huawei-GigabitEthernet0/0/1]di th[V200R001C01]#interface GigabitEthernet0/0/1ip address 218.24.164.213 255.255.255.0nat outbound 2000#return[Huawei-GigabitEthernet0/0/1]nat ser pro tcp glo 218.24.164.213 7008 ins 192.168 .1.200 7008Error: The address conflicts with interface or ARP IP.[Huawei-GigabitEthernet0/0/1]di veHuawei Versatile Routing Platform SoftwareVRP (R) software, Version 5.90 (AR1200 V200R001C01)Copyright (C) 2011 HUAWEI TECH CO., LTDHuawei AR1220 Router uptime is 0 week, 0 day, 3 hours, 14 minutesBKP 0 version information:1. PCB Version : AR01BAK1A VER.A2. If Supporting PoE : Yes3. Board Type : AR12204. MPU Slot Quantity : 15. LPU Slot Quantity : 2MPU 0(Master) : uptime is 0 week, 0 day, 3 hours, 14 minutes SDRAM Memory Size : 512 M bytesFlash Memory Size : 256 M bytesNVRAM Memory Size : 512 K bytesMPU version information :1. PCB Version : AR01SRU1A VER.C2. MAB Version : 03. Board Type : AR1220W-S4. CPLD1 Version : 1045. BootROM Version : 225[Huawei-GigabitEthernet0/0/1]di th[V200R001C01]#interface GigabitEthernet0/0/1ip address 218.24.164.213 255.255.255.0nat outbound 2000#return[Huawei-GigabitEthernet0/0/1]undo ip add ?IP_ADDR<X.X.X.X> IP addressbootp Bootp clientbootp-alloc Bootp client allocdhcp Dynamic host configure protocoldhcp-alloc IP address allocunnumbered Share an address with another interface<cr> Please press ENTER to execute command[Huawei-GigabitEthernet0/0/1]undo ip add[Huawei-GigabitEthernet0/0/1]di th[V200R001C01]#interface GigabitEthernet0/0/1nat outbound 2000#return[Huawei-GigabitEthernet0/0/1]nat ser pro tcp glo ?X.X.X.X Global IP address of NATcurrent-interface Address of current interfaceinterface Specify the interface[Huawei-GigabitEthernet0/0/1]nat ser pro tcp glo 218.24.164.213 7008 ?inside Specify inside information of NAT[Huawei-GigabitEthernet0/0/1]nat ser pro tcp glo 218.24.164.213 7008 inside 192. 168.1.200 7008[Huawei-GigabitEthernet0/0/1]di th[V200R001C01]#interface GigabitEthernet0/0/1nat server protocol tcp global 218.24.164.213 7008 inside 192.168.1.200 7008nat outbound 2000#return[Huawei-GigabitEthernet0/0/1]Please check whether system data has been changed, and save data in timeConfiguration console time out, please press any key to log on<Huawei><Huawei><Huawei><Huawei>saThe current configuration will be written to the device.Are you sure to continue? (y/n)[n]:yIt will take several minutes to save configuration file, please wait.......... ...Configuration file had been saved successfullyNote: The configuration file will take effect after being activated<Huawei>。
Midas Building 迈达斯 说明书

北京迈达斯技术有限公司目录1.midas Building 2012 版本程序构成2id B ildi中代表2.midas Building中代表结构设计软件发展方向的标志性功能1.midas Building 2012 版本程序构成(1)基本模块(2个,结构大师、基础大师)基本模块(2个结构大师基础大师)(2)增值模块(3个模块组合、共17个模块)-高端分析模块组合(5个模块)-校审和校核模块组合(5个模块)-常规设计模块组合(7个模块)1. 基本模块-结构大师基本模块结构大师---混合结构设计-钢筋砼结构设计钢结构设计SRC结构设计-线弹性时程分析-转换梁设计-异形柱、异形墙、异形板、弧墙、弧梁1. 基本模块-基础大师基本模块基础大师梁板式平板式-独基-桩基-筏基(梁板式、平板式)-桩筏-条基-独基+防水板-三维地质模型2. 增值模块-高端分析模块组合(5个)增值模块高端分析模块组合(个)-性能设计-静力弹塑性分析-动力弹塑性分析-强柱弱梁系数-导入实配钢筋2. 增值模块-校审和校核模块组合(5个)增值模块校审和校核模块组合(个)---强条、超限校审系统与Gen 互导软件-导入PKPM 模型与Etabs 互导软件-与PKPM 参数及主要分析设计结果比较软件2. 增值模块-常规设计模块组合(7个)增值模块常规设计模块组合(个)-施工图(地上)-施工图(基础)-含钢量统计-设计工具箱(详细计算书)-RC 结构优化设计-人防设计-建模师(读取建筑图生成结构模型系统)2.midas Building 代表结构设计软件未来发展方向的标志性功能(1)结构分析的准确性()(6)性能设计的先进性()(2)参数结果的开放性(3)校审功能的创新性(7)弹塑性分析方便性(8)优化设计的经济性(4)与其它程序的兼容性(9)自动成图的探索性(5)强柱弱梁系数的实用性(10)基于网络的效率性(1)结构分析的准确性1)混合结构分析的准确性结构分析准确性¾考虑不同材料的阻尼比(基于应变能的振型阻尼比法)¾整体分析-混合结构(上钢下混)-混合结构(外钢内混)-定义不同材料的阻尼比-在定义反应谱时勾选考虑不同材料阻尼比的影响-提供网架建模助手,便于整体分析2)分析模型的准确性按梁建模、按墙分析、按转换转换梁分析模准确性(按梁建模按分析按转换梁设计)¾转换结构设计中存在的问题•按梁分析,用调整刚度解决模型不准确问题•转换梁上部剪力墙没有细分,造成梁上墙设计内力不准确•转换楼层没有设置为弹性板,造成梁内力不准确3)活荷载不利布置可考虑对其他楼层梁及竖向构件的影响活荷载利布考虑对其他楼层梁向构件影考虑对其他楼层梁竖向构件的影响考虑对其他楼层梁、竖向构件的影响仅考虑对本层梁的影响(偏于不安全)4). 异形板导荷的准确性)异形板导荷的准确性异形板导荷准确的重要性:¾影响周边竖向构件的轴压比和变形变形差¾造成周边框架梁配筋不准确:导荷不准确引起的+竖向构件变形差不准确引起的异形板导荷准确模拟隔墙荷载(2)参数结果的开放性)振型质量参与系数的开放1). 振型质量参与系数的开放2). 偶然偏心尺寸的开放)偶然偏尺寸的开放高规4.3.3广东补充规定:e i =0.1732r i 开放偶然偏心取值3). 风荷载的迎风面宽度的开放)风荷载的迎风面宽度的开放¾目前存在的问题:迎风面宽度取值偏小程序自动实际宽度迎风面宽度开放迎风面宽度4). 截面有效高度计算中默认钢筋直径的开放5). 详细设计过程的开放)详细设计过程的开放(3)校审功能的创新性1). 输入建筑位置、设防分类等信息)输入建筑位置设防分类等信息2). 自动校审荷载、材料、截面和结构布置(强条、超限)3). 自动校审、(强条、超限))自动校审分析设计参数和结果(强条超限)4). 自动校审经济性)自动校审济性5). 提供校审记录单)提供校审记录单输出校审记录单6). 对校审NG结果的错误定位)对校审结果的错误定位错误自动定位功能7). 校审依据与规范条文联动)校审依据与规范条文联动查看规范校审依据功能(4)与其他程序的兼容性1). 基本参数对比)基本参数对2). 分析参数对比)分析参数对3). 设计参数对比)设计参数对)整体结果对4). 整体结果对比-周期、质量、位移角、剪重比、刚重比、层结果、调整系数)构件结果对5). 构件结果对比-可指定楼层、指定构件、指定误差范围(5)强柱弱梁系数的实用性1). 考虑楼板贡献、采用实配钢筋计算)考虑楼板贡献采用实配钢筋计算强柱弱梁系数限值(抗规6.2.2):一级框架结构和9度一级框架最小值为1.2,2~4级为1.1-输入要考虑的翼缘宽度-实配钢筋或计算配筋*超配系数(6)性能设计的先进性1). 提供抗规、高规两种方法 整体控制参数(选择抗规时) ---既可以整体做,也可以选择构件做)提供抗规高规两种方法承载力验算整体控制(选择抗规时)层间位移角整体控制(选择抗规时)1). 提供抗规、高规两种方法 选择构件的性能目标(选择高规时,可指定关键构件等构件类型))提供抗规高规两种方法2). 按平法方式的图形结果(按地震动))按平法方式的图形结果(按地震动)轴力水准–弯矩水准–剪力水准系数-系数-系数中震:(或小震、大震)系数=验算内力/承载力2). 按平法方式的图形结果(按内力输出))按平法方式的图形结果(按内力输出)小震水准-中震水准-大震水准系数-系数-系数弯矩:(或轴力、剪力)系数=验算内力/承载力)文本结果(小震中震大震下各内力项验算) 3). 文本结果(小震、中震、大震下各内力项验算))表格结果(小震中震大震下各内力项验算) 4). 表格结果(小震、中震、大震下各内力项验算)(7)弹塑性分析的方便性1). 一键式的前处理操作)键式的前处理操作只需键只需一键即可生成分析数据(铰类型、铰特性、荷载、收敛条件)。
迈达斯教程及使用操作手册
迈达斯教程及使⽤操作⼿册01-材料的定义通过演⽰介绍在程序中材料定义的三种⽅法。
1、通过调⽤数据库中已有材料数据定义——⽰范预应⼒钢筋材料定义。
2、通过⾃定义⽅式来定义——⽰范混凝⼟材料定义。
3、通过导⼊其他模型已经定义好的材料——⽰范钢材定义。
⽆论采⽤何种⽅式来定义材料,操作顺序都可以按下列步骤来执⾏:选择设计材料类型(钢材、混凝⼟、组合材料、⾃定义)→选择的规范→选择相应规范数据库中材料。
对于⾃定义材料,需要输⼊各种控制参数的数据,包括弹性模量、泊松⽐、线膨胀系数、容重等。
钢材规范混凝⼟规范图1 材料定义对话框02-时间依存材料特性定义我们通常所说的混凝⼟的收缩徐变特性、混凝⼟强度随时间变化特性在程序⾥统称为时间依存材料特性。
定义混凝⼟时间依存材料特性分三步骤操作:1、定义时间依存特性函数(包括收缩徐变函数,强度发展函数)(图1,图2);2、将定义的时间依存特性函数与相应的材料连接(图3);3、修改时间依存材料特性值(构件理论厚度或体积与表⾯积⽐)(图4);图1 收缩徐变函数图2 强度发展函数定义混凝⼟时间依存材料特性时注意事项: 1)、定义时间依存特性函数时,混凝⼟的强度要输⼊混凝⼟的标号强度; 2)、在定义收缩徐变函数时构件理论厚度可以仅输⼊⼀个⾮负数,在建⽴模型后通过程序⾃动计算来计算构件的真实理论厚度;3)、混凝⼟开始收缩时的材龄在收缩徐变函数定义中指定,加载时的混凝⼟材龄在施⼯阶段定义中指定(等于单元激活时材龄+荷载施加时间);4)、修改单元时间依存材料特性值时要对所有考虑收缩徐变特性的混凝⼟构件修改其构件理论厚度计算值。
计算公式中的a 代表在空⼼截⾯在构件理论厚度计算时,空⼼部分截⾯周长对构件与⼤⽓接触的周边长度计算的影响系数;5)、当收缩徐变系数不按规范计算取值时,可以通过⾃定义收缩徐变函数来定义混凝⼟的收缩徐变特性;6)、如果在施⼯阶段荷载中定义了施⼯阶段徐变系数,那么在施⼯阶段分析中将按施⼯阶段荷载中定义的徐变系数来计算。
MIDAS侦测器故障代码与故障诊断

0P3 型热分解器失效,Data value: Data value: others, 热分解器内部失效,联系服务商。
传感器缺失, 无通讯。 重装传感器。更换传感器。
F49
Cartridge wrong type.
传感器型号错误,与出厂设置不一致,更换传感器或如果现
在安装的传感器类型正确的话,“打勾”确认。
F80
Temperature limits exceeded. 温度超限 检查安装环境
F81
Flow fail.
0P3 pyrolyzer module failure
热分解器加热不匹配,需要不同型号的热分解器。联系服务 商需要用HTP 型号的热分解器。MIDAS-S-CFX or MIDAS-E-CFX 需要安装在高温型的热分解器上。 更换HTP 型号的热分解器 。 0P3 型热分解器失效,Data value: 0x0800,热分解加温失 效 0P3 型热分解器失效,Data value: 0x1000,热分解器流量 超出范围,检查MIDAS 主机和PO3热分解器之间的流量
器的前提下,检查环境背景气体浓度, 或更换传感器。
F46
Cartridge analog failure.
传感器模拟转换故障, 电子故障或检测气体浓度大范围超出
量程造成损坏, 更换传感器。
F47
Cartridge memory invalid.
传感器内存失效,传感器内部校验失效,更换传感器。
F48
Cartridge absent.
F42
Calibration expired.
F43
Cartridge expired.
F44
Cell failure.
midas查询构件两端边界条件
midas查询构件两端边界条件1. 什么是midas查询构件?Midas查询构件是一种用于执行数据库查询的工具。
它可以帮助用户快速地查询数据库中的数据,并将结果以可视化的方式呈现出来。
在使用Midas查询构件时,需要设置一些边界条件,以确保查询结果的准确性和完整性。
2. midas查询构件两端边界条件是什么?在使用Midas查询构件时,需要设置两个边界条件,即起始边界和结束边界。
起始边界是指查询结果的开始位置,结束边界是指查询结果的结束位置。
通过设置这两个边界条件,可以确保查询结果的范围不会超出预期范围。
3. 如何设置midas查询构件两端边界条件?设置Midas查询构件的两端边界条件需要按照以下步骤进行:1)打开Midas查询构件,并选择要查询的数据库。
2)在查询条件中设置起始边界和结束边界。
可以通过设置查询结果的起始行和结束行来设置边界条件。
3)保存查询条件并执行查询。
查询结果将根据设置的边界条件进行筛选和呈现。
4. midas查询构件两端边界条件的作用是什么?设置Midas查询构件的两端边界条件可以确保查询结果的准确性和完整性。
如果没有设置边界条件,查询结果可能会包含不必要的数据,或者漏掉一些重要的数据。
通过设置边界条件,可以将查询结果限制在预期范围内,提高查询效率和准确性。
5. midas查询构件两端边界条件的注意事项是什么?在设置Midas查询构件的两端边界条件时,需要注意以下几点:1)边界条件的设置应该合理,不能过于宽松或过于严格。
2)边界条件的设置应该考虑到查询结果的完整性和准确性。
3)边界条件的设置应该与查询条件相匹配,以确保查询结果的一致性。
4)在设置边界条件时,应该注意数据库中数据的变化,及时调整边界条件,以避免数据漏掉或重复。
总之,设置Midas查询构件的两端边界条件是保证查询结果准确性和完整性的重要措施,需要合理设置并及时调整。
基于MIDAS的桥梁荷载试验方案设计系统-使用说明书
基于MIDAS的桥梁荷载试验方案设计系统使用说明书1.软件功能本系统基于MIDAS/Civil软件(已测试6.71与2010版本)中桥梁控制截面影响线文件,自动进行荷载试验方案的设计并完成相关绘图工作,主要功能如下:(1)根据MIDAS/Civil(已测试6.71与2010版本)软件中生成的各荷载试验工况影响线文件,以及用户对加载效率的要求,根据试验车辆等输入数据,自动计算各工况满足加载效率时的车辆加载方案。
(2)计算所有车辆加载方案对所有工况的加载效率,防止某加载方案对其他工况加载效率过大,并当某加载方案对多个工况均满足加载效率时,即可实现试验工况的合并,减少现场试验工作量。
(3)对所有工况的车辆加载方案中任何车辆均可进行参数的修改、车辆删除或车辆增加,自动重新计算相应的加载效率。
(4)可在本系统中及Auto CAD(已测试2006及2008版)软件中,生成相关的荷载试验方案设计示意图。
2.使用要求装有Windows Xp/Vista/7等操作系统的计算机;计算机中装有AUTO CAD软件(已测试2006及2008版,用于车辆加载方案示意图的自动生成);部分杀毒软件有可能误报为木马,请添加信任后运行;3.使用说明以下通过一算例说明程序的使用方法:(1)在Midas中将各荷载试验工况对应截面效应的影响线导出到本软件运行目录的“影响线文件”文件夹内,分别以各工况名称命名,文件类型为txt,Midas中导出前的单位建议使用“kN,cm”(此处单位即为计算及绘图时所使用的单位,由于MIDAS影响线文件保留小数点后6位,kN,m的单位设置有可能产生挠度影响线数值过小而导致精度难以满足),如图1~图2所示。
图1 MIDAS影响线导出图2 MIDAS影响线导出(2)运行本软件,在“设计荷载效应及加载效率范围输入”、“试验车辆信息输入”中分别填入相关数据,如图3~图4所示。
图3 “设计荷载效应及加载效率范围输入”窗口界面图4 “试验车辆信息输入”窗口界面补充说明:“各工况设计荷载效应”根据实桥设计荷载等级等参数由Midas软件计算,单位与导出影响线时使用的单位应一致。
Indradrive 系列 故障代码

Error MessagesF9001 Error internal function call.F9002 Error internal RTOS function callF9003 WatchdogF9004 Hardware trapF8000 Fatal hardware errorF8010 Autom. commutation: Max. motion range when moving back F8011 Commutation offset could not be determinedF8012 Autom. commutation: Max. motion rangeF8013 Automatic commutation: Current too lowF8014 Automatic commutation: OvercurrentF8015 Automatic commutation: TimeoutF8016 Automatic commutation: Iteration without resultF8017 Automatic commutation: Incorrect commutation adjustment F8018 Device overtemperature shutdownF8022 Enc. 1: Enc. signals incorr. (can be cleared in ph. 2) F8023 Error mechanical link of encoder or motor connectionF8025 Overvoltage in power sectionF8027 Safe torque off while drive enabledF8028 Overcurrent in power sectionF8030 Safe stop 1 while drive enabledF8042 Encoder 2 error: Signal amplitude incorrectF8057 Device overload shutdownF8060 Overcurrent in power sectionF8064 Interruption of motor phaseF8067 Synchronization PWM-Timer wrongF8069 +/-15Volt DC errorF8070 +24Volt DC errorF8076 Error in error angle loopF8078 Speed loop error.F8079 Velocity limit value exceededF8091 Power section defectiveF8100 Error when initializing the parameter handlingF8102 Error when initializing power sectionF8118 Invalid power section/firmware combinationF8120 Invalid control section/firmware combinationF8122 Control section defectiveF8129 Incorrect optional module firmwareF8130 Firmware of option 2 of safety technology defectiveF8133 Error when checking interrupting circuitsF8134 SBS: Fatal errorF8135 SMD: Velocity exceededF8140 Fatal CCD error.F8201 Safety command for basic initialization incorrectF8203 Safety technology configuration parameter invalidF8813 Connection error mains chokeF8830 Power section errorF8838 Overcurrent external braking resistorF7010 Safely-limited increment exceededF7011 Safely-monitored position, exceeded in pos. DirectionF7012 Safely-monitored position, exceeded in neg. DirectionF7013 Safely-limited speed exceededF7020 Safe maximum speed exceededF7021 Safely-limited position exceededF7030 Position window Safe stop 2 exceededF7031 Incorrect direction of motionF7040 Validation error parameterized - effective thresholdF7041 Actual position value validation errorF7042 Validation error of safe operation modeF7043 Error of output stage interlockF7050 Time for stopping process exceeded8.3.15 F7051 Safely-monitored deceleration exceeded (159)8.4 Travel Range Errors (F6xxx) (161)8.4.1 Behavior in the Case of Travel Range Errors (161)8.4.2 F6010 PLC Runtime Error (162)8.4.3 F6024 Maximum braking time exceeded (163)8.4.4 F6028 Position limit value exceeded (overflow) (164)8.4.5 F6029 Positive position limit exceeded (164)8.4.6 F6030 Negative position limit exceeded (165)8.4.7 F6034 Emergency-Stop (166)8.4.8 F6042 Both travel range limit switches activated (167)8.4.9 F6043 Positive travel range limit switch activated (167)8.4.10 F6044 Negative travel range limit switch activated (168)8.4.11 F6140 CCD slave error (emergency halt) (169)8.5 Interface Errors (F4xxx) (169)8.5.1 Behavior in the Case of Interface Errors (169)8.5.2 F4001 Sync telegram failure (170)8.5.3 F4002 RTD telegram failure (171)8.5.4 F4003 Invalid communication phase shutdown (172)8.5.5 F4004 Error during phase progression (172)8.5.6 F4005 Error during phase regression (173)8.5.7 F4006 Phase switching without ready signal (173)8.5.8 F4009 Bus failure (173)8.5.9 F4012 Incorrect I/O length (175)8.5.10 F4016 PLC double real-time channel failure (176)8.5.11 F4017 S-III: Incorrect sequence during phase switch (176)8.5.12 F4034 Emergency-Stop (177)8.5.13 F4140 CCD communication error (178)8.6 Non-Fatal Safety Technology Errors (F3xxx) (178)8.6.1 Behavior in the Case of Non-Fatal Safety Technology Errors (178)8.6.2 F3111 Refer. missing when selecting safety related end pos (179)8.6.3 F3112 Safe reference missing (179)8.6.4 F3115 Brake check time interval exceeded (181)Troubleshooting Guide | Rexroth IndraDrive Electric Drivesand ControlsI Bosch Rexroth AG VII/XXIITable of ContentsPage8.6.5 F3116 Nominal load torque of holding system exceeded (182)8.6.6 F3117 Actual position values validation error (182)8.6.7 F3122 SBS: System error (183)8.6.8 F3123 SBS: Brake check missing (184)8.6.9 F3130 Error when checking input signals (185)8.6.10 F3131 Error when checking acknowledgment signal (185)8.6.11 F3132 Error when checking diagnostic output signal (186)8.6.12 F3133 Error when checking interrupting circuits (187)8.6.13 F3134 Dynamization time interval incorrect (188)8.6.14 F3135 Dynamization pulse width incorrect (189)8.6.15 F3140 Safety parameters validation error (192)8.6.16 F3141 Selection validation error (192)8.6.17 F3142 Activation time of enabling control exceeded (193)8.6.18 F3143 Safety command for clearing errors incorrect (194)8.6.19 F3144 Incorrect safety configuration (195)8.6.20 F3145 Error when unlocking the safety door (196)8.6.21 F3146 System error channel 2 (197)8.6.22 F3147 System error channel 1 (198)8.6.23 F3150 Safety command for system start incorrect (199)8.6.24 F3151 Safety command for system halt incorrect (200)8.6.25 F3152 Incorrect backup of safety technology data (201)8.6.26 F3160 Communication error of safe communication (202)8.7 Non-Fatal Errors (F2xxx) (202)8.7.1 Behavior in the Case of Non-Fatal Errors (202)8.7.2 F2002 Encoder assignment not allowed for synchronization (203)8.7.3 F2003 Motion step skipped (203)8.7.4 F2004 Error in MotionProfile (204)8.7.5 F2005 Cam table invalid (205)8.7.6 F2006 MMC was removed (206)8.7.7 F2007 Switching to non-initialized operation mode (206)8.7.8 F2008 RL The motor type has changed (207)8.7.9 F2009 PL Load parameter default values (208)8.7.10 F2010 Error when initializing digital I/O (-> S-0-0423) (209)8.7.11 F2011 PLC - Error no. 1 (210)8.7.12 F2012 PLC - Error no. 2 (210)8.7.13 F2013 PLC - Error no. 3 (211)8.7.14 F2014 PLC - Error no. 4 (211)8.7.15 F2018 Device overtemperature shutdown (211)8.7.16 F2019 Motor overtemperature shutdown (212)8.7.17 F2021 Motor temperature monitor defective (213)8.7.18 F2022 Device temperature monitor defective (214)8.7.19 F2025 Drive not ready for control (214)8.7.20 F2026 Undervoltage in power section (215)8.7.21 F2027 Excessive oscillation in DC bus (216)8.7.22 F2028 Excessive deviation (216)8.7.23 F2031 Encoder 1 error: Signal amplitude incorrect (217)VIII/XXII Bosch Rexroth AG | Electric Drivesand ControlsRexroth IndraDrive | Troubleshooting GuideTable of ContentsPage8.7.24 F2032 Validation error during commutation fine adjustment (217)8.7.25 F2033 External power supply X10 error (218)8.7.26 F2036 Excessive position feedback difference (219)8.7.27 F2037 Excessive position command difference (220)8.7.28 F2039 Maximum acceleration exceeded (220)8.7.29 F2040 Device overtemperature 2 shutdown (221)8.7.30 F2042 Encoder 2: Encoder signals incorrect (222)8.7.31 F2043 Measuring encoder: Encoder signals incorrect (222)8.7.32 F2044 External power supply X15 error (223)8.7.33 F2048 Low battery voltage (224)8.7.34 F2050 Overflow of target position preset memory (225)8.7.35 F2051 No sequential block in target position preset memory (225)8.7.36 F2053 Incr. encoder emulator: Pulse frequency too high (226)8.7.37 F2054 Incr. encoder emulator: Hardware error (226)8.7.38 F2055 External power supply dig. I/O error (227)8.7.39 F2057 Target position out of travel range (227)8.7.40 F2058 Internal overflow by positioning input (228)8.7.41 F2059 Incorrect command value direction when positioning (229)8.7.42 F2063 Internal overflow master axis generator (230)8.7.43 F2064 Incorrect cmd value direction master axis generator (230)8.7.44 F2067 Synchronization to master communication incorrect (231)8.7.45 F2068 Brake error (231)8.7.46 F2069 Error when releasing the motor holding brake (232)8.7.47 F2074 Actual pos. value 1 outside absolute encoder window (232)8.7.48 F2075 Actual pos. value 2 outside absolute encoder window (233)8.7.49 F2076 Actual pos. value 3 outside absolute encoder window (234)8.7.50 F2077 Current measurement trim wrong (235)8.7.51 F2086 Error supply module (236)8.7.52 F2087 Module group communication error (236)8.7.53 F2100 Incorrect access to command value memory (237)8.7.54 F2101 It was impossible to address MMC (237)8.7.55 F2102 It was impossible to address I2C memory (238)8.7.56 F2103 It was impossible to address EnDat memory (238)8.7.57 F2104 Commutation offset invalid (239)8.7.58 F2105 It was impossible to address Hiperface memory (239)8.7.59 F2110 Error in non-cyclical data communic. of power section (240)8.7.60 F2120 MMC: Defective or missing, replace (240)8.7.61 F2121 MMC: Incorrect data or file, create correctly (241)8.7.62 F2122 MMC: Incorrect IBF file, correct it (241)8.7.63 F2123 Retain data backup impossible (242)8.7.64 F2124 MMC: Saving too slowly, replace (243)8.7.65 F2130 Error comfort control panel (243)8.7.66 F2140 CCD slave error (243)8.7.67 F2150 MLD motion function block error (244)8.7.68 F2174 Loss of motor encoder reference (244)8.7.69 F2175 Loss of optional encoder reference (245)Troubleshooting Guide | Rexroth IndraDrive Electric Drivesand Controls| Bosch Rexroth AG IX/XXIITable of ContentsPage8.7.70 F2176 Loss of measuring encoder reference (246)8.7.71 F2177 Modulo limitation error of motor encoder (246)8.7.72 F2178 Modulo limitation error of optional encoder (247)8.7.73 F2179 Modulo limitation error of measuring encoder (247)8.7.74 F2190 Incorrect Ethernet configuration (248)8.7.75 F2260 Command current limit shutoff (249)8.7.76 F2270 Analog input 1 or 2, wire break (249)8.7.77 F2802 PLL is not synchronized (250)8.7.78 F2814 Undervoltage in mains (250)8.7.79 F2815 Overvoltage in mains (251)8.7.80 F2816 Softstart fault power supply unit (251)8.7.81 F2817 Overvoltage in power section (251)8.7.82 F2818 Phase failure (252)8.7.83 F2819 Mains failure (253)8.7.84 F2820 Braking resistor overload (253)8.7.85 F2821 Error in control of braking resistor (254)8.7.86 F2825 Switch-on threshold braking resistor too low (255)8.7.87 F2833 Ground fault in motor line (255)8.7.88 F2834 Contactor control error (256)8.7.89 F2835 Mains contactor wiring error (256)8.7.90 F2836 DC bus balancing monitor error (257)8.7.91 F2837 Contactor monitoring error (257)8.7.92 F2840 Error supply shutdown (257)8.7.93 F2860 Overcurrent in mains-side power section (258)8.7.94 F2890 Invalid device code (259)8.7.95 F2891 Incorrect interrupt timing (259)8.7.96 F2892 Hardware variant not supported (259)8.8 SERCOS Error Codes / Error Messages of Serial Communication (259)9 Warnings (Exxxx) (263)9.1 Fatal Warnings (E8xxx) (263)9.1.1 Behavior in the Case of Fatal Warnings (263)9.1.2 E8025 Overvoltage in power section (263)9.1.3 E8026 Undervoltage in power section (264)9.1.4 E8027 Safe torque off while drive enabled (265)9.1.5 E8028 Overcurrent in power section (265)9.1.6 E8029 Positive position limit exceeded (266)9.1.7 E8030 Negative position limit exceeded (267)9.1.8 E8034 Emergency-Stop (268)9.1.9 E8040 Torque/force actual value limit active (268)9.1.10 E8041 Current limit active (269)9.1.11 E8042 Both travel range limit switches activated (269)9.1.12 E8043 Positive travel range limit switch activated (270)9.1.13 E8044 Negative travel range limit switch activated (271)9.1.14 E8055 Motor overload, current limit active (271)9.1.15 E8057 Device overload, current limit active (272)X/XXII Bosch Rexroth AG | Electric Drivesand ControlsRexroth IndraDrive | Troubleshooting GuideTable of ContentsPage9.1.16 E8058 Drive system not ready for operation (273)9.1.17 E8260 Torque/force command value limit active (273)9.1.18 E8802 PLL is not synchronized (274)9.1.19 E8814 Undervoltage in mains (275)9.1.20 E8815 Overvoltage in mains (275)9.1.21 E8818 Phase failure (276)9.1.22 E8819 Mains failure (276)9.2 Warnings of Category E4xxx (277)9.2.1 E4001 Double MST failure shutdown (277)9.2.2 E4002 Double MDT failure shutdown (278)9.2.3 E4005 No command value input via master communication (279)9.2.4 E4007 SERCOS III: Consumer connection failed (280)9.2.5 E4008 Invalid addressing command value data container A (280)9.2.6 E4009 Invalid addressing actual value data container A (281)9.2.7 E4010 Slave not scanned or address 0 (281)9.2.8 E4012 Maximum number of CCD slaves exceeded (282)9.2.9 E4013 Incorrect CCD addressing (282)9.2.10 E4014 Incorrect phase switch of CCD slaves (283)9.3 Possible Warnings When Operating Safety Technology (E3xxx) (283)9.3.1 Behavior in Case a Safety Technology Warning Occurs (283)9.3.2 E3100 Error when checking input signals (284)9.3.3 E3101 Error when checking acknowledgment signal (284)9.3.4 E3102 Actual position values validation error (285)9.3.5 E3103 Dynamization failed (285)9.3.6 E3104 Safety parameters validation error (286)9.3.7 E3105 Validation error of safe operation mode (286)9.3.8 E3106 System error safety technology (287)9.3.9 E3107 Safe reference missing (287)9.3.10 E3108 Safely-monitored deceleration exceeded (288)9.3.11 E3110 Time interval of forced dynamization exceeded (289)9.3.12 E3115 Prewarning, end of brake check time interval (289)9.3.13 E3116 Nominal load torque of holding system reached (290)9.4 Non-Fatal Warnings (E2xxx) (290)9.4.1 Behavior in Case a Non-Fatal Warning Occurs (290)9.4.2 E2010 Position control with encoder 2 not possible (291)9.4.3 E2011 PLC - Warning no. 1 (291)9.4.4 E2012 PLC - Warning no. 2 (291)9.4.5 E2013 PLC - Warning no. 3 (292)9.4.6 E2014 PLC - Warning no. 4 (292)9.4.7 E2021 Motor temperature outside of measuring range (292)9.4.8 E2026 Undervoltage in power section (293)9.4.9 E2040 Device overtemperature 2 prewarning (294)9.4.10 E2047 Interpolation velocity = 0 (294)9.4.11 E2048 Interpolation acceleration = 0 (295)9.4.12 E2049 Positioning velocity >= limit value (296)9.4.13 E2050 Device overtemp. Prewarning (297)Troubleshooting Guide | Rexroth IndraDrive Electric Drivesand Controls| Bosch Rexroth AG XI/XXIITable of ContentsPage9.4.14 E2051 Motor overtemp. prewarning (298)9.4.15 E2053 Target position out of travel range (298)9.4.16 E2054 Not homed (300)9.4.17 E2055 Feedrate override S-0-0108 = 0 (300)9.4.18 E2056 Torque limit = 0 (301)9.4.19 E2058 Selected positioning block has not been programmed (302)9.4.20 E2059 Velocity command value limit active (302)9.4.21 E2061 Device overload prewarning (303)9.4.22 E2063 Velocity command value > limit value (304)9.4.23 E2064 Target position out of num. range (304)9.4.24 E2069 Holding brake torque too low (305)9.4.25 E2070 Acceleration limit active (306)9.4.26 E2074 Encoder 1: Encoder signals disturbed (306)9.4.27 E2075 Encoder 2: Encoder signals disturbed (307)9.4.28 E2076 Measuring encoder: Encoder signals disturbed (308)9.4.29 E2077 Absolute encoder monitoring, motor encoder (encoder alarm) (308)9.4.30 E2078 Absolute encoder monitoring, opt. encoder (encoder alarm) (309)9.4.31 E2079 Absolute enc. monitoring, measuring encoder (encoder alarm) (309)9.4.32 E2086 Prewarning supply module overload (310)9.4.33 E2092 Internal synchronization defective (310)9.4.34 E2100 Positioning velocity of master axis generator too high (311)9.4.35 E2101 Acceleration of master axis generator is zero (312)9.4.36 E2140 CCD error at node (312)9.4.37 E2270 Analog input 1 or 2, wire break (312)9.4.38 E2802 HW control of braking resistor (313)9.4.39 E2810 Drive system not ready for operation (314)9.4.40 E2814 Undervoltage in mains (314)9.4.41 E2816 Undervoltage in power section (314)9.4.42 E2818 Phase failure (315)9.4.43 E2819 Mains failure (315)9.4.44 E2820 Braking resistor overload prewarning (316)9.4.45 E2829 Not ready for power on (316)。
迈达斯教程
桥梁电算课程讲义编者:张宇辉目录第一章绪论1.1 课程与职业的关系(重要性)1.2 课程的特点(难点)1.3 学习目的1.4 学习内容1.5 学习要求第二章常用桥梁结构分析软件概述2.1 结构力学计算器SM-SOLVER2.2 桥梁博士Dr.bridge2.3 迈达斯Midas Civil2.4 Ansys2.5 其它2.6 工程实例演示第三章桥梁数值计算分析3.1 建模3.2 桥梁荷载介绍3.3 桥梁计算分析3.4 桥梁作用效应组合3.5 桥梁正常使用极限状态验算(自学)3.6桥梁承载能力极限状态验算(自学)第四章上机实践4.1 简支梁桥建模4.2 拱桥建模加载4.3 预应力混凝土梁桥施工阶段分析第一章 绪论1.1 课程与职业的关系(重要性)1.2 课程的特点(难点)1.3 学习目的1.4 学习内容1.5 学习要求1.1 课程与职业的关系(重要性)1 直接相关:本课程将直接应用于以后的生产实践。
(读研、就业)2 针对性:不同的专业,使用的软件不同,对结构设计的要求不同。
3 广泛性:无论以后从事何种职业,都或多或少都会用到本门课程的相关知识。
(科研、设计、施工)1.2课程的特点(难点)1 深厚的理论知识⎪⎪⎭⎪⎪⎬⎫计算机桥梁力学数学 2 实践性强只有通过实践解决实际问题,才能学会。
1.3学习目的掌握桥梁结构分析的基本理论了解桥梁结构分析的一般流程初步了解计算分析软件Midas1.4 学习内容常用桥梁计算软件概述Midas 初级功能桥梁平面杆系模型的建立掌握桥梁荷载效应影响线、恒载内力、活载内力计算荷载效应组合结构强度验算和正常使用性能验算参考教材:《公路钢筋混凝土及预应力混凝土桥涵设计规范》 MIDAS2006使用说明书1.5 学习要求独立完成常规桥梁的计算分析考核要求:理论课成绩=70%随堂测验+30%平时考勤上机课成绩=70%上机考核+30%平时考勤第二章常用桥梁结构分析软件概述2.1 桥梁结构分析的杆系有限单元法2.2 结构力学计算器SM-SOLVER2.3 桥梁博士Dr.bridge2.4 迈达斯Midas Civil2.5 Ansys2.6 其它2.7 工程实例演示2.1 桥梁结构分析的杆系有限单元法桥梁结构分析,可分为总体分析和局部分析两大部分。
midas软件初级使用教程
midas软件初级使⽤教程⽬录建⽴模型①设定操作环境 .....................................................................................................................................................定义材料 .............................................................................................................................................................输⼊节点和单元 .................................................................................................................................................输⼊边界条件 .....................................................................................................................................................输⼊荷载 .............................................................................................................................................................运⾏结构分析 .....................................................................................................................................................查看反⼒ .............................................................................................................................................................查看变形和位移 .................................................................................................................................................查看内⼒ .............................................................................................................................................................查看应⼒ .............................................................................................................................................................梁单元细部分析 .................................................................................................................................................表格查看结果 ..................................................................................................................................................... 建⽴模型②设定操作环境 .....................................................................................................................................................建⽴悬臂梁 .........................................................................................................................................................输⼊边界条件 .....................................................................................................................................................输⼊荷载 ............................................................................................................................................................. 建⽴模型③建模 .....................................................................................................................................................................输⼊边界条件 .....................................................................................................................................................输⼊荷载 ............................................................................................................................................................. 建⽴模型④建⽴两端固定梁 .................................................................................................................................................输⼊边界条件 .....................................................................................................................................................输⼊荷载 ............................................................................................................................................................. 建⽴模型⑤⑥⑦⑧摘要本课程针对初次使⽤MIDAS/Civil 的技术⼈员,通过悬臂梁、简⽀梁等简单的例题,介绍了MIDAS/Civil 的基本使⽤⽅法和功能。
midas gts操作指南1

5. 根据用户需求设定Prefere Nhomakorabeace后点击
。
6. 选择Tools > Unit System…。
7. 将Forces (Mass)指定为‘Tonf (ton)’。
8. 将Length指定为‘m’。
9. 将Time指定为‘hour’。
在操作的过程中利用右侧 10. 点击
。
下端的设定单位体系可以
gridsnap在grid的交点处捕捉vertexsnap在vertex处捕捉endsnap在edge的端点处捕捉middlesnap在edge的中点处捕捉perpendicularsnap与目标edge可以垂直相交处捕捉centersnap在圆弧的圆心点捕捉quadrantsnap以圆弧的起始点为基准在090180270处的象限点捕捉intersectionsnap在两边相遇的交点处捕捉nodesnap在网格的节点处捕捉gts操作指南21对于vertexsnap不是只适用于独立的顶点对于那些子个体subshape的顶点也同样适用所以当捕捉到模型的顶点处进行附加操作时会使用的
GTS操作指南 1 - 5 在所有的选择按钮里可以使用指定选择对象类型的Selection Filter。在任意对话框 里 要进行选择的状态下Selection Filter里会显示可供选择的对象。此时变换Selection Filter后可以指定并选择对象的类型。如果将Selection Filter指定为任意类型,那么只 能选择指定类型的几何形状(Geometry)。所以当Selection Filter指定为Face的状 态 下进行步骤22到28的操作,实体在Selection Filter里既不会亮显也不会被选中。
在前一阶段选择的实体和 30. 在画面上点击鼠标右键调出关联菜单。
MIDASGTS2D39隧道参数分析中文

模型>施工阶段>定义施工阶段
操作过程
09
*
1)在“阶段名称”中输入“BT39 阶段8”,阶段类型指定为“施工阶段” 2)将【组数据】中的“S/C右侧硬化”拖放到【激活数据】 3)点击【保存】 4)点击【关闭】,施工阶段定义完成
模型>施工阶段>定义施工阶段
操作过程
1)在主菜单里面选择【分析】>【分析工况】 2)点击【添加】 3)名称中输入“K0=0.5” 4)描述中输入“参数优化” 5)分析类型中指定【施工阶段】 6)选择【分析控制】 7)选择【应力分析初始阶段】为“初始阶段应力分析”,即“BT39 Stage1” 8)勾选【K0条件】,点击【确定】 9)在“添加/修改分析工况”中,点击【确定】
模型>施工阶段>定义施工阶段
操作过程
09
*
1)在“阶段名称”中输入“BT39 阶段4”,阶段类型指定为“施工阶段” 2)将【组数据】中的“左侧R/B”“左侧S/C”拖放到【激活数据】 3)点击【保存】 4)在“阶段名称”中输入“BT39 阶段5”,阶段类型指定为“施工阶段” 5)将【组数据】中的“S/C左侧硬化”拖放到【激活数据】 6)点击【保存】 7)点击【新建】,输入下一个阶段
09
*
Drag & Drop
模型>施工阶段>定义施工阶段
操作过程
09
*
1)在“阶段名称”中输入“BT39 阶段2”,阶段类型指定为“施工阶段” 2)选择【位移清零】,点击【保存】 3)删除两个阶段中的不平衡应力,此阶段指定为“Null阶段” 4)点击【新建】,输入下一阶段 5)在“阶段名称”中输入“BT39 阶段3”,阶段类型指定为“施工阶段” 6)将【组数据】中的“右侧隧道”拖放到【钝化数据】 7)勾选【LDF…….】,点击【保存】 8)点击【新建】,输入下一阶段
midas gen 操作指南与基本例题

midas gen 操作指南与基本例题下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor.I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!Midas Gen 操作指南与基础应用解析一、Midas Gen 简介Midas Gen是一款由韩国Midas Soft公司开发的专业结构分析软件,广泛应用于土木工程领域,尤其在桥梁、建筑等复杂结构的静力、动力分析中表现出色。
MIDAS中初始荷载的说明

MIDAS中初始荷载的说明
(本文自网上文章修改整理,不对之处请指正^_^)
从MIDAS6.71版本开始,在“荷载/初始荷载”中,分为大位移和小位移两项,其内又分为几何刚度初始荷载、初始荷载控制数据、初始单元内力3项内容(如下图所示)。
其作用分别如下:
1.大位移→几何刚度初始荷载
用于几何非线性分析,描述荷载作用之前的结构的初始状态。
其中施加的初始荷载不对结构现有的变形起作用,程序会自动按现有的几何构型和内力找到一个平衡点,因此,在初始荷载(多为预拉力)作用下结构位移为零。
如果有新的荷载工况参与作用,分析得到的新的位移将是以当前的初始状态为前提条件得到的;当然,内力结构是包含初始内力的叠加值。
2.小位移→初始单元内力
此选项只适用于线性分析,其作用与几何刚度初始荷载相同,即通过形成几何刚度来影响结构的总体刚度。
但其刚度并不随作用荷载的变化而变化,因此可以说是为了对于一个非线性结构进行线性分析而设置的功能,如对拉索结构进行特征值分析等。
3.小位移→初始荷载控制数据
此选项用于闺怨输入的初始单元内力添加给指定的荷载工况。
如果不添加,则在分析时只考虑初始单元内力引起的几何刚度影响,在相应荷载工况的内力结果中,不包含初始单元内力。
midas 单元温差 -回复
midas 单元温差-回复什么是midas 单元温差?Midas 单元温差是指Mid-Infrared Differential Absorption Spectroscopy(中红外差分吸收光谱技术)的缩写。
它是一种用于气体成分测量的光谱技术,利用红外光的不同波长被物质吸收的特性来定量分析气体成分。
这种技术通过测量样品中不同波长红外光的吸收量差异来获取样品中特定气体的浓度信息。
Midas 单元温差的原理和应用Midas 单元温差技术基于不同波长红外光被样品吸收的特性,利用样品中特定气体的吸收线和相应的参考线之间的差异来测量气体浓度。
一般来说,每种气体都有其特定的吸收线,在红外光谱中呈现出典型的吸收峰。
Midas 单元温差技术的工作原理如下:首先,通过红外光源产生一束连续的、包含多个波长的红外光,然后将这束光分为两个通道。
一个通道通过样品,另一个通道通过参考气体。
样品和参考气体吸收红外光的程度取决于它们所含气体的浓度。
样品和参考气体吸收的光强差异在探测器处被转换成电信号。
通过比较样品信号与参考信号的差异,可以得到样品中特定气体的浓度。
Midas 单元温差技术的应用广泛。
例如,在环境监测中,可以使用Midas 单元温差技术实时监测大气中的污染物浓度,如二氧化碳、甲烷等。
这种技术还可以应用于生物医学领域,用于检测呼出气中的代谢产物,以实现无创诊断。
此外,Midas 单元温差技术在工业过程监测、气候变化研究、食品质量检测等领域也有重要的应用。
Midas 单元温差技术的优势和挑战相比传统的气体浓度测量技术,Midas 单元温差技术具有许多优势。
首先,它具有高灵敏度和快速响应的特点,能够快速准确地测量气体浓度,适用于实时监测。
其次,Midas 单元温差技术不受湿度、压力等环境条件的影响,可以在不同环境条件下稳定工作。
此外,由于Midas 单元温差技术是非接触式测量,所以对样品不会产生损伤,适用于各种样品的测量。
MIDAS软件安装时对所出现的一些问题的解决方法
MIDAS软件安装时对所出现的一些问题的解决方法MIDAS软件安装时对所出现的一些问题的解决方法一、安装升级程序后若出现“没有发现保护锁”或“密钥号码不一致”等问题时,可尝试按以下方法解决。
1)在“添加/删除程序”中删除相应MIDAS程序、单机版密钥驱动器(Sentinel System Driver 5.41.1(32-bit)、网络版密钥驱动器(SuperProNet Combo Installer)2)若无法将SuperProNet Combo Installer删除,则需通过附录方法将其强行删除。
3)重新安装相应MIDAS程序,安装后重新启动4)单机版只需安装Sentinel System Driver 5.41.1(32-bit),网络版只需安装SuperProNet Combo Installer。
若要通过运行系统硬盘里Program Files /MIDAS/Civil or Gen / Protection drivers / SPNComboInst1.0.2.exe来安装网络版密钥驱动器,则需先将单机版密钥驱动器(Sentinel System Driver 5.41.1(32-bit)删除5)同时使用SDS或FEmodeler的用户若运行该程序时出现“没有发现保护锁”或“密钥号码不一致”等问题时,可在安装完Civil或Gen之后重新安装一下SDS或FEmodeler程序。
二、彻底删除MIDAS软件后重新安装的方法1.在控制面板/添加或删除程序中删除MIDAS/Civil, Sentinel System Driver5.41.1(32-bit)(客户端), SuperProNet Combo Installer(服务器)。
(有可能出现删除不了的情况)2.若使用Windows95或98系统则需将DriverRemove9x.zip 解压缩后运行Sentw9x.exe文件,若使用Windows2000或XP系统则需将DriverRemoveNT.zip解压缩后运行Setupx86.exe文件。
MIdas相关操作
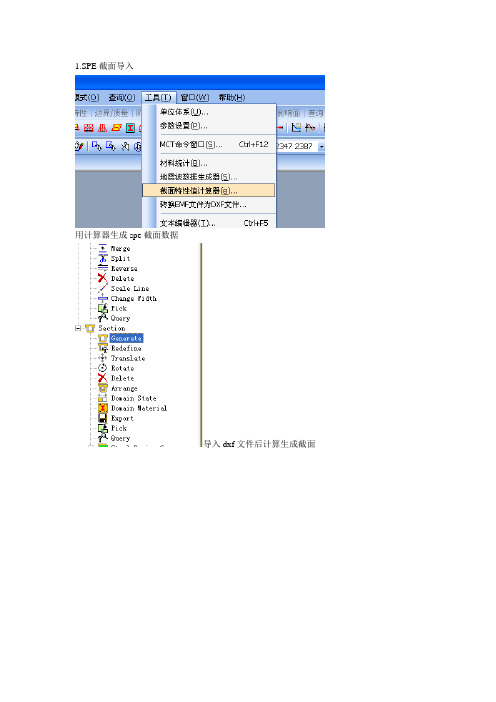
1.SPE截面导入用计算器生成spe截面数据导入dxf文件后计算生成截面计算生成截面】点击上方小菜单“calculate property”可以设置精度重新计算点击“export”输出为sec文件点适用生成sec文件注:截面导入时要求线不能为多段线2. 生成截面时选“plane”不选“line”2. midas中的快速选择可点击上述两个按钮,并按属性进行选择或者在树形菜单“组”里选择相应的结构组即可选中相关属性的全部单元3. 张杨永翔凤河桥midas模型中支承约束类型处理:刚性连接:A.拉索与主梁刚性连接,主节点为主梁节点B.尾部拱脚与主梁刚性连接,主节点为主梁节点C.头部拱脚Y字形刚性连接,主节点为下部节点D.中墩副墩与主梁刚性连接,主节点为墩节点弹性连接:A.副墩墩顶的两节点为弹性连接,其中上部节点与主梁刚接(见下页图)粉色的三个节点为关键节点,2023-主梁节点,282、283-副墩节点,282与2023刚接282与283弹性连接一般支承A.支座类大小桩号侧的8个支座B.固结类中墩墩底的三个节点全约束固结C.满堂支架施工的支架类几乎全部的主梁节点及索塔节点注:midas中共用节点视为刚接,不共用节点时可把两者设为弹性或刚性连接。
4. 杨模型中主梁与墩固结处理建立一个单元作为刚臂,并把弹性模量设很大,如下图4. midas中梯度温度在“梁截面温度”一项里添加,选择“边-顶”即按折线分段描述5.截面特性调整系数在“模型”—“材料和截面特性”—“截面特性调整系数”选择截面进行设置即可,注:此项设置后一旦程序用到该截面就会把调整系数赋予给截面。
在此定义的截面特性调整系数,只对计算位移和内力时起作用,在计算应力时采用原来的截面特性值。
但如果计算应力时要考虑截面特性调整系数时,在主菜单的分析 >主控数据对话框里选择《在应力计算中考虑截面特性调整系数》选项即可。
6. “梁单元荷载(单元)”和“梁单元荷载(连续)”的区别“连续”用来输入整体梯形荷载,“单元”按单元来输入荷载,在输入大范围梯形荷载时不方便7. midas里“车道”仅是定义了荷载作用的位置,荷载量值由“车辆”一栏里定义CH代表中国,CD代表车道荷载,CL代表车辆荷载,RQ代表人群荷载。
MIDAS教程范文

MIDAS教程范文本文是关于MIDAS的教程,介绍了MIDAS的基本功能和使用方法。
MIDAS(Molecular Dynamics for Antibiotics and Sulfonamides)是一种分子动力学模拟软件,用于研究抗生素和磺胺类药物的相互作用。
它可以模拟药物与靶标蛋白结构之间的相互作用,并提供有关药物-蛋白结合的相关信息。
本教程将带您逐步学习如何使用MIDAS进行药物-蛋白结合的分子动力学模拟。
在新项目中,您需要导入药物和蛋白质结构。
MIDAS支持多种文件格式,如PDB、MOL2和SDF。
选择您的药物和蛋白质文件,并将其导入到MIDAS中。
接下来,您需要为药物和蛋白质选择力场。
力场是描述分子之间相互作用的数值模型,可以影响模拟结果的准确性。
MIDAS支持多种力场,包括AMBER、CHARMM和OPLS。
选择适当的力场,以确保模拟结果的可靠性。
在选择力场后,您需要为模拟系统设定初始参数。
包括温度、压力、离子浓度等。
这些参数将影响模拟的物理环境。
您可以根据您的研究需求选择适当的参数。
然后,您需要设定模拟的时间范围和时间步长。
时间范围是模拟的总时长,时间步长是模拟的时间间隔。
较长的时间范围和较小的时间步长将提供更准确的模拟结果,但同时也会增加计算成本。
选择适当的时间范围和时间步长以平衡准确性和计算成本。
在设定参数后,您可以开始运行模拟。
MIDAS将自动进行模拟,并生成模拟结果。
您可以通过观察模拟过程中的系统状态,了解药物和蛋白质结构之间的相互作用。
模拟结果包括能量、构象和动力学信息等,这些信息对于研究药物的活性和药效至关重要。
最后,您可以使用MIDAS的分析工具对模拟结果进行进一步的分析。
该工具可以帮助您提取有用的信息,如药物-蛋白质结合位点、结合能和动力学特性等。
这些信息有助于揭示药物与蛋白质之间的相互作用机制,并为药物设计提供指导。
综上所述,MIDAS是一种强大的分子动力学模拟软件,用于研究药物-蛋白质结合。
midas桥梁分析输入

MIDAS/Civil内存的计算符号
36
输入数据
※ 使用例 1. 2. 计算符号可以混用大小字母。 与工学计算机的使用方法相同,计算顺序也追寻数学法则。
37
在对话窗口将输入点从一个输入栏移到另一个输入栏时可使用键盘的[Tab]键,或 直接用鼠标指定。 使用[Shift]+[Tab]可以使输入表单逆向移动。
33
Hale Waihona Puke GETTING STARTED
对话框(Dialog Box)形式的对话窗口
对话条(Dialog Bar)形式的对话窗口
表格窗口是可以一目了然地了解所有输入资料和设计结果 , 并可进行重新输入或 进行修改的Spread sheet形式的窗口。 MCT命令窗口是使用文本形式的命令语输入数据来建模的特殊功能。
MIDAS/Civil的表格窗 口不仅可以提供数据的 输入、输出及修改功 能,还提供各种选择功 能、过滤功能、归类功 能、编辑功能、提供图 像功能及与 Excel 的数据 交换功能等。
单元表格窗口
34
输入数据
数据输入方式
MIDAS/Civil为了方便用户提供如下的多种数据的输入方式。 在一个数据输入栏中同时输入几个数字的数据时使用„ , ‟ (空格)来区分。 <例如> “ 333, 102, 101” 或 “ 333 102 101” 在输入位置数据或构件的截面和材料时,可以通过在模型窗口简单指定 输入的对象来取代输入。 在输入长度或具有方向性的增量时,可以使用鼠标编辑器功能 在模型 窗口用鼠标指定输入对象的起点和终点来取代直接在键盘上的输入。
可以输入计算式。工学上使用的大部分计算符号和括号都可以使用。 <例如> 20 2 " PI 20 ^ 2" <例如> 35 3 (sin 30 2 cos2 30 sin 2 30 ) 35 3 (sin(30 ) 2 SQRT (cos(30 )^ 2 sin(30 )^ 2))
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
MIDAS/Civil的‘在线帮助手册’
13
GETTING STARTED
MIDAS/Civil的‘在线帮助手册’对内容的目录及主要关键字的索引作了非常系 统地整理。因此,您不仅可以如读书一般按照目录的顺序查看,而且可以通过使 用关键字查询功能直接查寻您所需要的内容。
在MIDAS/Civil的‘帮助’菜单中,可以通过使用MIDAS IT在互联网与midasIT 的主页()连接或发送e-mail (beijing@ )。
信息窗口 状态条
19
GETTING STARTED
主菜单
初次使用MIDAS/ CIVIL时,为了了解操作 环境和功能,最好使用 主菜单。对MIDAS/ CIVIL有了一定地了解之 后,使用图标菜单和关 联菜单就会获得更佳效 果。
MIDAS/Civil内存所有功能的指示命令和快捷键。
文件 编辑 查看 模型
荷载
分析 结果 模式 查询 工具
窗口 帮助
包括与文件的建立、保存、打印、数据互换等相关的功能 包括撤销/重做功能和Spread sheet形式的表格化数据的编辑功能等 模型的视觉表现方法的调整功能、选择功能、激活/钝化功能等 网格、节点、单元、截面特性、边界条件、质量等模型数据的输入 功能和定义群的功能等 各种静力荷载、动力荷载、温度荷载及施工阶段分析、移动荷载分 析、水化热分析和几何非线性分析所需数据的输入功能等 分析过程中所需的各种控制数据的输入和分析运行功能等 荷载组合条件的输入、分析结果的图形处理、查询及分析功能等 前处理模式和后处理模式的转换功能 节点或者单元的输入状态及属性的查询功能 单位系及初期操作环境的设定、MCT命令窗口、材料目录表的列 成、地震数据的生成、截面特性值计算器的运行功能等 操作画面的各种窗口调整和排列功能 帮助功能及连接midas IT的主页、发送e-mail的功能等
Binary
移动荷载分析和影响线/影响面分析过程中生成的所 有数据会被保存起来。 是通过分析>运行分析功能而自动生成的。
Binary
几何非线性分析过程中生成的所有数据会被保存起 来。 是通过分析>运行分析功能而自动生成的。
Binary
施工阶段分析过程中所生成的所有数据会被保存起 来。 是通过分析>运行分析功能而自动生成的。
开始之前
使用‘在线帮助手册’
在使用MIDAS/Civil的过程中如有疑问,可按F1键或者在帮助菜单中选择‘在线 帮助手册’,通过使用目录、索引、查寻及收藏等功能获得相关信息。 由于其中的各项目都是超链接,您可以获得关于关键字以及其它相关内容的详细 的说明和介绍。
‘在线帮助手册’的 符号表示鼠标编辑功能 可以在相应输入栏中使 用。 鼠标编辑功能可以取代用 键盘输入数据的方式,而 是简单地用鼠标直接在画 面上输入材料或复制距离 等数据。
输入输出文件
运用MIDAS/Civil时所使用的文件种类、用途及生成路径如下。
数据文件
请参照‘在线帮助手 册’的“CIVIL功能>工具> MCT命令窗口”。
fn.mcb fn.mct
Binary Text
MIDAS/Civil的基本数据文件。 新建时使用文件>新项目。 打开现有文件时使用文件>打开项目。 也是MIDAS/Civil的基本数据文件。必要时可以通过 MCT命令窗口或文本编辑器对其进行修改。在MIDAS /Civil所生成的数据可以转换为其它S/W的输入数 据。 该文件在文件>导出>MIDAS/Civil MCT文件菜单中 生成,通过文件>导入>MIDAS/Civil MCT文件可以 导入MIDAS/Civil的模型数据。
保存MIDAS/Civil的地震加速度和反应谱生成模块所
算出的地震数据。
使用工具>地震波数据自动生成器功能。
Text
是保存地震反应谱分析中所需的反应谱数据的文
件。
使用荷载>反应谱分析数据>反应谱函数功能。
Text
是保存时间依存性分析中所需的时间荷载函数相关
数据的文件。
使用荷载>时程分析数据>时间荷载函数功能。
Binary
是保存生成批处理结果数据的文件。
此文件可通过使用结果菜单查看分析结果功能中的
生成批处理结果对话窗口的
键生成,生成的
文件可通过
键导入。
18
开始之前
操作环境的构成及菜单系统
MIDAS/Civil的菜单系统是为了可以方便地运行输入、输出及分析过程中所需的 所有功能,最少地移动鼠标而获得最佳的操作效果而构成的。
换。
fn.s2k
Text
SAP2000的数据文件,用于与MIDAS/Civil的数据互
换。
fn.std
Text
STAAD的数据文件,用于与MIDAS/Civil的数据互
换。
fn.gti
Text
GTSTRUDL的数据文件,用于与MIDAS/Civil的数
据Байду номын сангаас换。
17
GETTING STARTED
其它文件
工具条和图标菜单
为了能够快速地导入经常使用的功能,MIDAS/Civil提供将各项功能形象化了的 图标菜单。各图标从属于各种类似功能图标群的工具条内。 各工具条可以用鼠标拉放到自己希望的位置上。使用工具>用户定制功能可以选 择或编辑工具条上的各项内容。对工具条上的某一图标的功能有疑问时,只要将 鼠标移到该图标的位置,就会出现简单的提示窗口(tool tip)。 MIDAS/Civil所提供的工具条和所属图标的功能请参照附录中的“工具条和图标 菜单”及“快捷键目录”。
23
资料参考:百科网 详细出处参考 :/
GETTING STARTED
最初画面状态上的工具条排列状态和状态条
‘工具 > 用户定制’功能对话窗口 24
资料参考:百科网 详细出处参考 :/
数据互换用文件
fn.mgb
Binary MIDAS/Gen V4.3以上版本中所使用的数据文件,用 于与MIDAS/Civil的数据互换。
fn.dxf
Text
AutoCAD DXF文件,用于与MIDAS/Civil的数据互
换。
fn.s90
Text
SAP90 的数据文件,用于与MIDAS/Civil 的数据互
14
开始之前
输出分析文件
fn.ca1 fn.ca2 fn.ca3 fn.ca4 fn.ca6 fn.anl
fn.out
Binary 静力分析过程中生成的数据会被保存起来。 是通过分析>运行分析功能而自动生成的。
Binary
时间依存性分析过程中所生成的各时间段分析结果 会被保存起来。 是通过分析>运行分析功能而自动生成的。
Text
是用户对结构分析的结果(反力,变形,单元内
力,应力等)自行整理的文件,可用于分析结果的
检验或者作为结构计算书的附录。
通过结果>文本输出功能而生成。
Text
在结构分析进行的过程中输出的各种信息及相关数
据会被保存起来。
是通过分析>运行分析功能而自动生成的。
15
GETTING STARTED
图形文件
fn.color Binary MIDAS/Civil所生成的数据会被保存起来。
点击查看>显示选项的颜色和打印颜色的
键
来生成。
fn.emf
Binary
模 型 窗 口 的 图 形 数 据 会 以 EMF(Enhanced M eta File)的形式保存起来。 是通过文件>WMF文件而自动生成的。
fn.bmp
Binary
模型窗口的图形数据会以BMP(Bitmap)的形式保存 起来。 是通过文件>WMF文件而自动生成的。
fn.mgf
Binary
在MIDAS/Civil的图形编辑器中生成的图形数据会被 保存起来。 是通过工具>图形编辑器的保存功能而自动生成的。
16
开始之前
请参照‘在线帮助手 册’的“CIVIL功能>文件> 导入/导出”。
表格窗口
是将各种数据的输入和分析结果以Spread sheet形式表格化了的窗口。 在表格窗口中可以提供各种数据的输入、追加输入、编辑功能、按属性整理功 能、查询功能等,也可以与Excel或一般的数据库软件进行互换。关于表格窗口的 具体使用方法请参照‘在线帮助手册’。
MIDAS表格窗口
使用Microsoft Excel的互换功能相互交换数据的画面
fn.bak fn.bom fn.sgs fn.spd fn.thd fn.bog
Binary
MIDAS/Civil的模型数据备份文件。 在工具>参数设置中选择建立备份文件,则在保存模 型数据时会自动生成。
Text
保存建模中所有构件的重量数据和材料目录。
是通过工具>材料统计功能而自动生成的。
Text
树形菜单的工作使得建模,分析及设计步骤非常体系化。通过它可以对建模过程 中模型数据的输入状况一目了然地进行确认,并且提供可对其修改的拖放(Drag& Drop)方式的建模功能。
主菜单
图标菜单
渲染窗口
查看结果
树形菜单
Modeling window
表格窗口
关联菜单
MIDAS/Civil操作画面的构成和菜单系统
20
拖放
开始之前
使用‘工作树’的拖放功能来方便地改变预应力梁截面的画面
关联菜单
为了能够做到最少地移动鼠标,而提供的通过在操作窗口点击鼠标的右键来显示 与操作内容相关的各项功能或经常使用的功能的菜单系统。
模型窗口
使用MIDAS/Civil的GUI(Graphic User Interface)功能进行建模、结果分析的操作 窗口。 模型窗口可以将几个窗口同时展现在一个画面中。由于各窗口的运用都是相互独 立的,因此各窗口可以使用不同的坐标系来建模。另外,因各窗口所使用的是相 同的数据库,所以在任何一个窗口中的操作内容都可以同时在其它的窗口上得到 反映。