Class_Notations(GL)
扫描特ktronic规格标准及合规性说明书
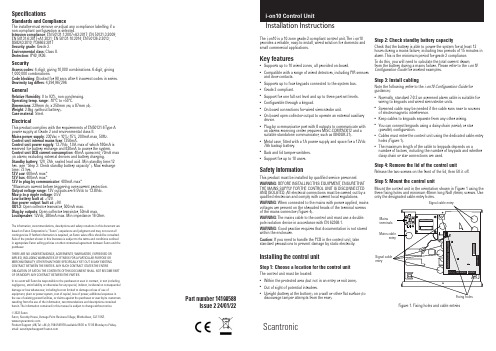
ScantronicSpecificationsStandards and ComplianceThe installer must remove or adjust any compliance labelling if a non-compliant configuration is selected.Intrusion compliance : EN 50131-1:2007+A2:2017; EN 50131-3:2009; EN 50131-6:2017+A1:2021; EN 50131-10:2014; EN 50136-2:2013; BS8243:2010; PD6662:2017Security grade : Grade 2.Environmental class : Class II.Protection: IP40, IK06.SecurityAccess codes : 4-digit, giving 10,000 combinations. 6-digit, giving 1,000,000 combinations.Code blocking : Blocked for 90 secs after 4 incorrect codes in series.Proximity tag differs : 4,294,967,296.GeneralRelative Humidity : 0 to 93%, non-condensing.Operating temp. range : -10°C to +55°C.Dimensions : 239mm (h) x 250mm (w) x 87mm (d).Weight : 2.8kg (without battery).Case material : Steel.ElectricalThis product complies with the requirements of EN50131-6 Type A power supply at Grade 2 and environmental class II.Mains power supply : 230Vac + 10%/-15%, 200mA max, 50Hz.Control unit internal mains fuse : T250mA.Control unit power supply : 13.7Vdc, 1.0A max of which 180mA is reserved for battery recharge and 820mA to power the system.Control unit PCB current consumption : 40mA quiescent; 70mA max (in alarm) excluding external devices and battery charging.Standby battery : 12V, 7Ah, sealed lead acid. Min standby time:12 hrs. (see “Step 2: Check standby battery capacity”). Max recharge time: 72 hrs.12V aux : 600mA max*12V bus : 400mA max*12V to plug-by communicator : 400mA max**Maximum current before triggering over-current protection. Output voltage range : 12V outputs are 9.5Vdc to 13.8Vdc. Max p-to-p ripple voltage : 0.5V.Low-battery fault at : <12V.Aux power output fault at : <9V.OP1-3: Open collector transistor, 500mA max.Plug-by outputs : Open collector transistor, 50mA max.Loudspeaker : 12Vdc, 280mA max. Min impedance 16 Ohm.The information, recommendations, descriptions and safety notations in this document are based on Eaton Corporation’s (“Eaton”) experience and judgment and may not cover all contingencies. If further information is required, an Eaton sales office should be consulted. Sale of the product shown in this literature is subject to the terms and conditions outlined in appropriate Eaton selling policies or other contractual agreement between Eaton and the purchaser.THERE ARE NO UNDERSTANDINGS, AGREEMENTS, WARRANTIES, EXPRESSED OR IMPLIED, INCLUDING WARRANTIES OF FITNESS FOR A PARTICULAR PURPOSE OR MERCHANTABILITY , OTHER THAN THOSE SPECIFICALL Y SET OUT IN ANY EXISTING CONTRACT BETWEEN THE PARTIES. ANY SUCH CONTRACT STATES THE ENTIREOBLIGATION OF EATON. THE CONTENTS OF THIS DOCUMENT SHALL NOT BECOME PART OF OR MODIFY ANY CONTRACT BETWEEN THE PARTIES.In no event will Eaton be responsible to the purchaser or user in contract, in tort (including negligence), strict liability or other-wise for any special, indirect, incidental or consequential damage or loss whatsoever, including but not limited to damage or loss of use of equipment, plant or power system, cost of capital, loss of power, additional expenses in the use of existing power facilities, or claims against the purchaser or user by its customers resulting from the use of the information, recommendations and descriptions contained herein. The information contained in this manual is subject to change without notice.© 2022 EatonEaton, Security House, Vantage Point Business Village, Mitcheldean, GL17 0SZ. Product Support (UK) Tel: +44 (0) 1594 541978 available 08:30 to 17:00 Monday to Friday. email:*****************************Installation InstructionsThe i-on10 is a 10-zone grade-2-compliant control unit. The i-on10 provides a reliable, easy-to-install, wired solution for domestic and small commercial applications.Key features•Supports up to 10 wired zones, all provided on-board.•Compatible with a range of wired detectors, including PIR sensors and door contacts. •Supports up to four keypads connected to the system bus. •Grade 2 compliant.•Support for one full-set level and up to three part-set levels. •Configurable through a keypad.•On-board connections for wired siren/strobe unit.•On-board open-collector output to operate an external auxiliary device. •Plug-by communicator port with 8 outputs to communicate with an alarms-receiving centre (requires MISC-COMPACK12 and a suitable standalone communicator, such as 0840UK-21). •Metal case, fitted with a 1A power supply and space for a 12Vdc 7Ah backup battery. •Back and lid tamper switches. •Support for up to 10 users.Safety InformationThis product must be installed by qualified service personnel. WARNING: BEFORE INSTALLING THIS EQUIPMENT , ENSURE THAT THE MAINS SUPPL Y FOR THE CONTROL UNIT IS DISCONNECTED AND ISOLATED. All electrical connections must be carried out by a qualified electrician and comply with current local regulations.WARNING : When connected to the mains with power applied, mains voltages are present on the shrouded heads of the terminal screws of the mains connector (Figure 4).WARNING: The mains cable to the control unit must use a double-pole isolation device in accordance with EN 62368-1.WARNING: Good practice requires that documentation is not stored within the enclosure.Caution: If you need to handle the PCB in the control unit, take standard precautions to prevent damage by static electricity.Installing the control unitStep 1: Choose a location for the control unitThe control unit must be located:•Within the protected area (but not in an entry or exit zone). •Out of sight of potential intruders.•Upright (battery at the bottom) on a wall or other flat surface (to discourage tamper attempts from the rear).Step 2: Check standby battery capacityCheck that the battery is able to power the system for at least 12 hours during a mains failure, including two periods of 15 minutes in alarm. This is the minimum period for grade 2 compliance.To do this, you will need to calculate the total current drawnfrom the battery during a mains failure. Please refer to the i-on10 Configuration Guide for worked examples.Step 3: Install cablingNote the following (refer to the i-on10 Configuration Guide for guidance):•Normally, standard 7/0.2 un-screened alarm cable is suitable for wiring to keypads and wired siren/strobe units. •Screened cable may be needed if the cable runs near to sources of electromagnetic interference. •Keep cables to keypads separate from any other wiring. •You can connect keypads using a daisy-chain (serial) or star (parallel) configuration. •Cables must enter the control unit using the dedicated cable-entry holes (Figure 1). •The maximum length of the cable to keypads depends on anumber of factors, including the number of keypads and whether daisy-chain or star connections are used.Step 4: Remove the lid of the control unitRelease the two screws on the front of the lid, then lift it off.Step 5: Mount the control unitMount the control unit in the orientation shown in Figure 1 using the three fixing holes and minimum 40mm long No8 (4mm) screws. Use only the designated cable-entry holes.entryMains Signal cable entryFigure 1. Fixing holes and cable entriesPart number 14199588Issue 2 24/01/22Step 6: Position the communicator and fit the fourth pillarIf a communicator is used, position it under the PCB.Fit the supplied fourth pillar for the PCB (see Figure 2), and securethe PCB to the pillar using the supplied M3x12 screw.Figure 2. Fitting the fourth pillarStep 7: Connect all wired devicesConnect all wired devices except the battery, as shown in Figure 3.Step 8: Connect the batteryNote: Connecting the battery does not start the system.Fit a 7Ah lead-acid battery in the bottom-left corner of the control unit.Connect the battery leads to the battery (red to positive and black to negative), and connect the transformer lead to the PCB (Figure 3).Step 9: Connect the mains cableENSURE THAT THE MAINS Y IS DISCONNECTED AND Figure 4. Mains connectionsStep 10: Re-fit the lid, switch on and configure the systemWARNING: During initial power-up, keypad sounders and anyinternal loudspeaker may give an alarm tone. If you are working at the top of a ladder, make sure that the sudden noise does not startle you and cause a fall.Re-fit the lid, then switch on the mains supply to the control unit.Go through the initial configuration prompts and set up the system as described in the i-on10 Configuration Guide . You are prompted to specify installer and user codes during initial system configuration.PCB links and connectorsThe following sections provide information about the links and connectors shown in Figure 3.a Plug-by communicator portYou can connect a plug-by communicator to this port using an optional MISC-COMPACK12 wiring harness (available separately). By default, outputs 1-8 are 0V when active, and 12Vdc when inactive. Please refer to the i-on10 Configuration Guide for the default output type used for each output and programming details.Connect LF (Line Fail) to an output from the communicator that is 12Vdc when communicator detects that there is a communications fault to the ARC, and 0V when no fault is present.If a dual-path (landline and mobile) communicator is used, such as a RedCARE STU, re-program one of the plug-by outputs to type ATS Test, and wire that to the ATS Test input of the communicator. Also connect Line Fail to the Line Fail output of the communicator, asabove. This is needed to comply with BSIA Form No. 175, April 2005. The control unit generates an “ATE LF Single” alert if one network is unavailable, or “ATE LF All” if both are unavailable.Connect RR (Remote Reset) to an output from the communicator that indicates to the control unit that a user can reset the system after a system tamper. The input must be 12Vdc for at least 100ms to indicate the reset, and 0v normally. For further details, see “Remote Reset (Redcare Reset)” in the i-on10 Configuration Guide .Note: During system commissioning, confirm with the ARC that the communicator is working correctly.b System busUp to four keypads can connect to the system bus. The installation instructions supplied with each keypad provide details of how to install the device. The address of each device is set by the control unit, as described in the i-on10 Configuration Guide .Please refer to “Step 3: Install cabling” for guidance about cabling.See also “RS485 bus termination link”.c Loudspeaker connectionsIf fitted, a loudspeaker mimics alarm tones and repeats setting and entry tones. The loudspeaker must be a minimum of 16 Ohms. Note:• A loudspeaker is not a warning device as described by EN50131-4. •You can set the loudspeaker volume from the Installer menu.d Open-collector (wired) outputThe open-collector transistor output can be used to switch external equipment on or off. By default, the output is 12Vdc when inactive and 0V when active (this can be reversed from the Installer menu).e Siren/strobe connectionsPlease refer to the installation instructions provided with the siren/strobe unit for connection details.f Wired zone connectionsYou can connect up to 10 wired detectors (0 to 9) to the control unit using the Fully-Supervised Loop (FSL), 4-wire Closed Circuit (CC) or 2-wire CC wiring method (Figure 5). You must use the same method for all detectors. If 4-wire CC is used, the number of zones is halved and are numbered 1-5. To maintain ten 4-wire CC zones (0-9), fit an ADP -10CC board and configure the resistance setting of each zone as 2k2/4k7.For any method, the total wiring and switch resistance must be lessthan 100 Ohms (EOL resistor shorted in the case of FSL).By default, the system assumes normally-closed contacts. Detectors with normally-open contacts must be programmed with the “Inverted” attribute set.Please refer to the i-on10 Configuration Guide for wiring details ifyou want to use two detectors per zone.Zone 0Zone 14-Wire CC Wiring2-Wire CC Wiring Supported resistor values (± 5%):EOL Alarm2k2 4k7 (default)1k0 1k02k2 2k24k7 4k7FSL Wiring, with 8k2 resistorsFigure 5. Zone wiringg Kick-start linkOrdinarily, the control unit starts only after the mains supply is switched on, even if a battery is connected. If you want to operate the control unit temporarily using only the battery, start the control unit by briefly shorting this link.h Reset codes linkYou can use this link to reset the installer and all user codes (e.g.in the event that codes have been forgotten). All proximity tags are also deleted. This link can be enabled or disabled by a setting in the Installer menu. Please refer to the i-on10 Configuration Guide for further details.i RS485 bus termination linkIf the control unit uses a single daisy chain to connect keypads and is at one end of the chain, fit a jumper across this link in the control unit and in the last keypad on the bus. RS485 termination canimprove performance in electrically noisy environments. The i-on10 Configuration Guide gives further guidance.MaintenanceInspect the control unit once or twice per year as part of general inspection of the whole system. At the control panel, check for any damage, test the battery, and check the action of the tamper switch.Please refer to the i-on10 Configuration Guide for general guidance about maintaining the whole system.Figure 3. Control unit PCBAB+120If a siren/strobe unit is not fitted, connect TR to 0V.d Open-collector outputb Ststem bus(Max 4 keypads)Connect transformer。
DNV-GL-rules

DNV GL RULES FOR CLASSIFICATION OF Det Norske Veritas ASGermanischer Lloyd SEThe content of this service document is the subject of intellectual property rights reserved by Det Norske Veritas AS (DNV) and Germanischer Lloyd SE (GL). The user accepts that it is prohibited by anyone else but DNV and GL and/or their licensees to offer and/or perform classification, certification and/or verification services, including the issuance of certificates and/or declarations of conformity, wholly or partly, on the basis of and/or pursuant to this document whether free of charge or chargeable, without DNV and GL’s prior written consent. DNV and GL are not responsible for the consequences arising from any use of this document by others.The electronic pdf version of this document found through and is the officially binding versionShipsGeneral RegulationsOCTOBER 2013FOREWORDDriven by our purpose of safeguarding life, property and the environment, DNV GL enables organizations to advance the safety and sustainability of their business. We provide classification and technical assurance along with software and independent expert advisory services to the maritime, oil and gas, and energy industries. We also provide certification services to customers across a wide range of industries. Operating in more than 100 countries, our 16000 professionals are dedicated to helping our customers make the world safer, smarter and greener.The Rules for Classification of Ships lay down procedural requirements for obtaining and retaining class certificates, and technical requirements and acceptance criteria for craft and their equipment.© Det Norske Veritas AS and Germanischer Lloyd SE October 2013Any comments may be sent by e-mail to rules@CHANGES – CURRENT – Page 3CHANGES – CURRENTGeneralThis is a new document.These Rules will enter into force from the date of publication.Contents – Page 4CONTENTS1INTRODUCTION (5)1.1General (5)1.1.1Purpose (5)1.2Definitions (5)2APPLICATION (5)2.1Validity (5)2.1.1In force date (5)2.1.2Scope (5)2.2Relation between these Rules and the legacy rule sets (5)2.2.1General (5)2.2.2Governing rules (6)3CLASSIFICATION PRINCIPLES (6)3.1Classification Systematics (6)3.1.1Use of legacy company information (6)3.1.2Assignment and retention of classification (6)3.1.3Application of more than one legacy rule set (6)3.2Newbuilding and Class entry (6)3.2.1Applicable rule set (6)3.2.2Acceptance of builder and designer (6)3.3Vessels in operation (6)3.3.1Applicable rule set (6)3.3.2Class and statutory certificates (6)3.3.3On-board documents / manuals (6)3.4Certificates of materials and components (6)3.4.1Acceptance of Certificates (6)Sec.1 INTRODUCTION – Page 51INTRODUCTION 1.1General 1.1.1Purpose1.1.1.1Following the merger of Det Norske Veritas AS (DNV) and Germanischer Lloyd SE (GL), hereafter denoted legacy companies, the DNV GL Rules for Classification of Ships, are established consisting of this rule document and the legacy companies existing rules at the start of joint operation.1.1.1.2The purpose of these Rules is to provide the basis for classification of ships by the Society.1.1.1.3This document refers to legacy rule sets, defined as DNV and GL rule sets in force within the respective legacy companies at the start of joint operation, including later changes in the respective rule sets.1.1.1.4Rules and rule amendments are accepted by the appropriate approval body of the Society and will come into force on a date decided by this body. Unless stated otherwise, the coming into force date shall be six (6)months after the date of publication.1.2Definitions2APPLICATION 2.1Validity 2.1.1In force date2.1.1.1These Rules will enter into force from the date of publication.2.1.2Scope2.1.2.1These Rules describe to what extent and how to use the two legacy rule sets.2.2Relation between these Rules and the legacy rule sets 2.2.1General2.2.1.1Requirements defined in these Rules supersede requirements as laid down in the legacy rule sets.2.2.1.2If requirements in these Rules are in conflict with legacy rule set, the requirements herein will prevail.2.2.1.3The Society reserves the exclusive right to interpret, decide equivalence or make exemptions to the Rules.Table 1.1 Terms and definitions Term DefinitionBuilder Signifies the party contracted to build a vessel in compliance with the Society’s rules.Certificate A document confirming compliance with the Society's rules or with other rules and regulations for which the Society has been authorized to act.Class entry Assignment of class to an existing vessel.Classification contract Contract between the builder and the Society for classification of the newbuilding.Date of “Classification contract”Newbuilding:The date on which the classification contract is signed.Date of “Order for classification”Vessel in operation:The date on which the order for classification of existing vessel is signed between the owner and the Society.Legacy company Term used for Det Norske Veritas AS (DNV) and Germanischer Lloyd SE (GL) prior to the start of joint operations under DNV GL AS.Legacy rule set DNV and GL rule sets in force within the legacy companies at the start of joint operation, including later changes in the respective rule sets.Main Character of Classification Characters showing compliance with a defined set of classification rules for hull and/or machinery.Newbuilding Vessels under construction at a builder.Rule set A complete set of rules provided by one legacy company, either DNV or GL, including all supporting documents.SocietyDNV GL AS, but prior to the start of joint operations: DNV or GL.Sec.3 CLASSIFICATION PRINCIPLES – Page 62.2.2Governing rules2.2.2.1The governing legacy rule set will be indicated by the following main character of classification:—1A1 – DNV legacy rule set—100A5 – GL legacy rule setand other main characters as defined in the respective legacy rule sets.3CLASSIFICATION PRINCIPLES3.1Classification Systematics3.1.1Use of legacy company information3.1.1.1The Society may use information related to classification and statutory services originating from either of the Legacy companies to the extent necessary for the performance of classification and statutory work at its discretion.3.1.2Assignment and retention of classification3.1.2.1The process for assigning, retaining, deleting and suspending class shall be in accordance with the applicable legacy rule set.3.1.3Application of more than one legacy rule set3.1.3.1Application of more than one legacy rule set for the same vessel or design is not accepted; except as given in [3.1.3.2].3.1.3.2Additional voluntary class notations from the other legacy rule set may be applied when accepted by the Society.3.2Newbuilding and Class entry3.2.1Applicable rule set3.2.1.1Classification is based on the legacy rule set as specified in the “Classification contract” in case of a newbuilding, or “Order for classification” in case of class entry, in accordance with [2.2.2]3.2.1.2Applicable rule edition shall be in accordance with applied legacy rule set.3.2.2Acceptance of builder and designer3.2.2.1The Society accepts builders or designers which have been accepted by one (or both) of the legacy companies as being capable of successfully manage classification projects.3.3Vessels in operation3.3.1Applicable rule set3.3.1.1Classification of vessels in operation shall be carried out in accordance with legacy rule set indicated by main character of classification in accordance with [2.2.2].3.3.2Class and statutory certificates3.3.2.1Certificates issued by the legacy companies, valid at the time of starting joint operation, will remain valid, unless expired, renewed or withdrawn.3.3.3On-board documents / manuals3.3.3.1Approvals given by legacy companies remain valid.3.4Certificates of materials and components3.4.1Acceptance of Certificates3.4.1.1Certification of materials and components shall be in accordance with the applied legacy rule set. The Society may, subject to a case by case assessment, accept certificates and approvals issued according to any of the legacy rule sets.。
Chapter 1 Basic Rules for Writing

Chapter 1 Manuscript Form
Division of proper names should be _______: avoided Armstrong Australia __________; ________, The ____________________ last word of a page should not be divided. It should be written on the next page; Division of words at the ends of several consecutive lines should be avoided _______.
Chapter 1 Manuscript Form
Title writing: The title or topic of your essay should be written in the way as follows: the first line In the middle of ___________; Every word of the title should be capitalized _________, except articles ___________, prepositions coordinating connections and _______, ______________________, to infinitives, unless one of these words is and __in the first or last word of the title ; ___________________________ phrases (nouns with their Topics are generally noun ___________ modifiers), though other forms are possible; No full stop should be used at the end of a title __________ unless the topic is a direct question.
scl里not语句
scl里not语句The "not" statement in structured control language (SCL) is a crucial element in programming and controllingindustrial systems. In SCL, the "not" statement is used to negate a condition or a variable, essentially reversing its logical value. This is important for decision-making processes and for controlling the flow of a program or a system. However, using the "not" statement in SCL can sometimes be tricky, as it requires a clear understandingof the logic involved and the specific requirements of the system being programmed.One of the main challenges in using the "not" statement in SCL is ensuring that it is applied in the correctcontext and that its effects are consistent with theoverall logic of the program. This requires a thorough understanding of the system being controlled, as well as a careful analysis of the conditions and variables involved.It is important to consider all possible scenarios and to anticipate any potential conflicts or inconsistencies thatmay arise from the use of the "not" statement.Another aspect to consider when using the "not" statement in SCL is its impact on the overall performance and reliability of the system. While the "not" statement can be a powerful tool for controlling the flow of a program, it can also introduce complexity and potential points of failure if not used carefully. Therefore, it is important to thoroughly test and validate the use of the "not" statement in SCL, and to consider its potential effects on the overall stability and robustness of the system.In addition to the technical challenges of using the "not" statement in SCL, there are also practical considerations to take into account. For example, the use of the "not" statement may impact the readability and maintainability of the code, making it more difficult for other programmers to understand and modify the program in the future. Therefore, it is important to use the "not" statement judiciously and to document its usage clearly, in order to facilitate collaboration and future developmentefforts.From a broader perspective, the use of the "not" statement in SCL reflects the larger challenges and trade-offs involved in programming and controlling industrial systems. It highlights the need for precision, clarity, and thoroughness in the design and implementation of control logic, as well as the importance of considering thepotential impacts and implications of specific programming constructs. Ultimately, the use of the "not" statement in SCL is just one example of the broader challenges and considerations that engineers and programmers face when working with complex and critical systems. It serves as a reminder of the need for careful planning, rigorous testing, and ongoing vigilance in the development and maintenance of industrial control systems.。
CCS和GL规范对DP的对照表
动力定位系统第8篇 第11章 钢质海船入级规范(3) 每一故障模式的主要可预测原因(4) 每一故障对船位的瞬态影响;(5) 探测故障的方法;(6) 故障对系统剩余能力的影响;(7) 对可能的公共故障模式的分析。
11.1.5.3 在编制FMEA报告时,应对每一单个故障模式对系统内其他部分的影响以及对整个DP 系统的影响进行说明。
11.1.5.4 当认为系统的某些部件无需冗余或无法进行冗余时,要进一步考虑这些部件的可靠性和机械保护。
11.1.5.5 作为FMEA分析报告的替代,可对每一种故障模式下的系统冗余度进行试验。
冗余度的试验程序应以模拟故障模式为基础,应尽可能在实际情况下进行试验。
详细的冗余度试验程序应提交审查。
第2节 系统布置11.2.1 一般要求11.2.1.1 本章规定一般类型的系统布置要求,除另有明文规定者外,这些要求适用于所有具有动力定位附加标志的船舶。
对各个分系统的特殊要求将在分系统中规定。
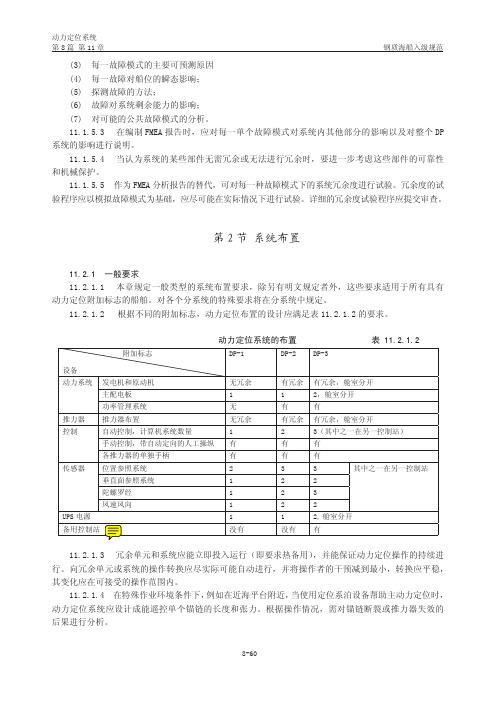
11.2.1.2 根据不同的附加标志,动力定位布置的设计应满足表11.2.1.2的要求。
动力定位系统的布置 表 11.2.1.211.2.1.3 冗余单元和系统应能立即投入运行(即要求热备用),并能保证动力定位操作的持续进行。
向冗余单元或系统的操作转换应尽实际可能自动进行,并将操作者的干预减到最小,转换应平稳,其变化应在可接受的操作范围内。
11.2.1.4 在特殊作业环境条件下,例如在近海平台附近,当使用定位系泊设备帮助主动力定位时,动力定位系统应设计成能遥控单个锚链的长度和张力。
根据操作情况,需对锚链断裂或推力器失效的后果进行分析。
8-60Chapter15 Page2–2Section2DP System Requirements I-Part1GL2000 B3.2For class notations DP2and DP3,the thruster system shall be connected to the power sys-tem in such a way that the requirements of3.1can be complied with even after failure of one of the con-stituent power systems and the thrusters connected to that system.3.3The values of thruster force used in the con-sequence analysis(see4.2.4)shall be corrected for interference between thrusters and other effects which would reduce the effective force.3.4A failure of the thruster system,including pitch,azimuth or speed control,shall not make the thruster rotation and/or other uncontrolled operation of pitch and speed.Table2.1DP system arrangement。
GL 德国劳氏船级社规范rules and guidelines

Rules & GuidelinesCode Edition GeneralUser GuideLicence Agreement and Software Order DocumentI - Ship TechnologyPart 0 - Classification and SurveysClassification and Surveys I-0 2013 Part 1 - Seagoing ShipsChapter 1 - Hull Structures I-1-1 2013 Hull Structures – Document referencing betweenEditions 2012 and 2013Chapter 2 - Machinery Installations I-1-2 2013 Chapter 3 - Electrical Installations I-1-3 2013 Chapter 4 - Automation I-1-4 2013 Chapter 5 - Structural Rules for Container Ships I-1-5 2013 Structural Rules for Container Ships – Documentreferencing between Editions 2012 and 2013Supplementary Rules for Application of Steelwith Yield Strength of 460 N/mm²2009 Chapter 6 - Liquefied Gas Carriers I-1-6 2008 Chapter 7 - Chemical Tankers I-1-7 2008 Chapter 8 - Fishing Vessels I-1-8 2007 Chapter 9 - Oil Recovery Vessels I-1-9 1993 Chapter 10 - Refrigerating Installations I-1-10 2000 Chapter 11 - Bridge Arrangement andEquipment on Seagoing Ships I-1-11 2012 Chapter 12 - Chemical Recovery Vessels I-1-12 2005 Chapter 14 - Redundant Propulsion andSteering Systems I-1-14 2000 Chapter 15 - Dynamic Positioning Systems I-1-15 2013 Chapter 16 - Harmony Class – Rules on Rating Noise and Vibrationfor Comfort, Cruise Ships (v ≤ 25 kn)I-1-16 2003 Chapter 17 - Guidelines forMachinery Condition Monitoring I-1-17 2008 Chapter 18 - Harmony Class – Rules on Rating Noise and Vibrationfor Comfort, Cruise Ships (v > 25 kn)I-1-18 2004 Chapter 19 - Guidelines for the Carriage ofRefrigerated Containers on Board Ships I-1-19 2003 Chapter 20 - Stowage and Lashing of Containers I-1-20 2013 Chapter 21 - Ventilation I-1-21 2005 Chapter 22 - Guidelines for the Construction ofPolar Class Ships I-1-22 2008Rules & GuidelinesCode Edition Chapter 23 - Harmony Class - Rules on Rating Noise andVibration for Comfort, Cargo Ships I-1-23 2009 Part 2 - Inland Navigation VesselsChapter 1 - Classification and Surveys I-2-1 2011 Chapter 2 - Hull Design and Construction I-2-2 2011 Chapter 3 - Machinery, Systems and Electricity I-2-3 2011 Chapter 4 - Additional Requirements for Notations I-2-4 2011 Part 3 - Special CraftChapter 1 - High Speed Craft I-3-1 2012 Chapter 2 - Yachts ≥ 24 m I-3-2 2003 Chapter 3 - Yachts and Boats up to 24 m I-3-3 2003 Chapter 4 - Guidelines for Lifeboats and Rescue Boats I-3-4 2008 Chapter 5 - Floating Docks I-3-5 1993 Chapter 6 - Preliminary Rules for Patrol Boats I-3-6 2010 Chapter 7 - Guidelines for the Structural Design ofRacing Yachts ≥ 24 m I-3-7 2012 Chapter 8 - Guidelines for Structural Design of TP52Racing Yachts I-3-8 2013 Part 4 - Rigging TechnologyChapter 1 - Tall Ship Rigs I-4-1 1997 Chapter 2 - Guidelines for Design and Constructionof Large Modern Yacht Rigs I-4-2 2009 Chapter 3 - Guidelines for the Type Approval ofCarbon Strand and PBO Cable Riggingfor Sailing Yachts I-4-3 2008 Part 5 - Underwater TechnologyChapter 1 - Diving Systems and Diving Simulators I-5-1 2009 Chapter 2 - Manned Submersibles I-5-2 2009 Chapter 3 - Unmanned Submersibles (ROV,AUV)and Underwater Working Machines I-5-3 2009 Part 6 - Offshore Service VesselsChapter 1 - Hull Structures I-6-1 2012 Chapter 2 - Machinery and Systems I-6-2 2011 Chapter 3 - Crew Boats and OffshoreWind Farm Service Craft I-6-3 2012 II - Materials and WeldingPart 1 - Metallic MaterialsChapter 1 - Principles and Test Procedures II-1-1 2009 Chapter 2 - Steel and Iron Materials II-1-2 2009Rules & GuidelinesCode Edition Rule Change Notice Chapter 2, Section 1 1 December 2011 Chapter 3 - Non-Ferrous Metals II-1-3 2009 Chapter 4 - Equipment II-1-4 2009 Chapter 5 - Materials for Propeller Fabrication II-1-5 2009 Chapter 6 - Special Materials for Naval Ships II-1-6 2003 Part 2 - Non-metallic MaterialsChapter 1 - Fibre Reinforced Plastics and Bonding II-2-1 2006 Chapter 2 - Wooden Materials II-2-2 2006 Chapter 3 - Guidelines for Elastomeric Adhesives andAdhesive Joints II-2-3 2002 Part 3 - WeldingChapter 1 - General Requirements,Proof of Qualifications, Approvals II-3-1 2000 Chapter 2 - Design, Fabrication and Inspectionof Welded Joints II-3-2 2000 Chapter 3 - Welding in the Various Fieldsof Application II-3-3 2000 Rule Change Notice Chapter 3, Section 1, F. March 2008, amended 2013 III - Naval Ship TechnologyPart 0 - Classification and SurveysClassification and Surveys III-0-0 2012 Part 1 - Surface ShipsChapter 1 - Hull Structures and Ship Equipment III-1-1 2012 Chapter 2 - Propulsion Plants III-1-2 2012 Chapter 3a - Electrical Installations III-1-3a 2012 Chapter 3b - Automation III-1-3b 2012 Chapter 4 - Ship Operation Installations andAuxiliary Systems III-1-4 2012 Part 2 - Sub-Surface ShipsChapter 1 - Submarines III-2-1 2008 Chapter 2 - Remotely Operated Underwater Vehicles III-2-2 2005 Chapter 3 - Guidelines for Air Independent PowerSystems for Underwater Use III-2-3 2005 IV - Industrial ServicesPart 6 - Offshore TechnologyChapter 1 - Classification, Certification and Surveys IV-6-1 2007 Chapter 2 - Mobile Offshore Units IV-6-2 2007Rules & GuidelinesCode Edition Addendum 1 for Chapter 2, Section 82012 Chapter 3 - Fixed Offshore Installations IV-6-3 2007 Chapter 4 - Structural Design IV-6-4 2007 Chapter 5 - Machinery Installations IV-6-5 2007 Chapter 6 - Electrical Installations IV-6-6 2007 Chapter 7 - Guideline for the Construction of Fixed OffshoreInstallations in Ice Infested Waters IV-6-7 2005 Chapter 8 - Guideline for the Certification ofBlow-Out Preventers IV-6-8 2011 Chapter 9 - Guideline for Personnel Transfers by Meansof Lifting Appliances IV-6-9 2011 Part 11 - Machinery and Civil Engineering WorksChapter 1 - Ship Lifts and Ro-Ro Ferry Ramps IV-11-1 2010 V - Analysis TechniquesPart 1 - Hull Structural Design AnalysesChapter 1 - Guidelines for Global Strength Analysisof Container Ships V-1-1 2011 Chapter 2 - Guidelines for Fatigue Strength Analysesof Ship Structures V-1-2 2004 Chapter 3 - Guidelines to Assess High-FrequencyHull Girder Response of Container Ships V-1-3 2013 Chapter 4 - Guidelines for Global Strength Analysis ofMultipurpose Vessels V-1-4 2013 Part 2 - Risk AnalysesChapter 1 - Guidelines for the Analysis of AlternativeDesign and Arrangements V-2-1 2009 VI - Additional Rules and GuidelinesPart 1 - Container TechnologyChapter 1 - Guidelines for the Construction, Repair andTesting of Freight Containers VI-1-1 1995 Part 2 - Loading GearChapter 2 - Loading Gear on Seagoing Ships andOffshore Installations VI-2-2 2012 Part 3 - Machinery InstallationsChapter 1 - Guidelines for the Use ofGas as Fuel for Ships VI-3-1 2010 Chapter 4 - Guidelines for Equipment onFire Fighting Ships VI-3-4 2008Rules & GuidelinesCode Edition Chapter 5 - Guidelines for Design, Equipment and Testingof Gas Welding Installations onSeagoing Ships VI-3-5 2008 Chapter 6 - Guidelines for the Construction,Equipment and Testing of ClosedFuel Oil Overflow Systems VI-3-6 2008 Chapter 7 - Guidelines for the Design, Construction andTesting of Pumps VI-3-7 2013 Chapter 11 - Guidelines for the Use of Fuel Cell Systemson Board of Ships and Boats VI-3-11 2003 Part 4 - Diesel EnginesChapter 1 - Guidelines for Mass Produced Engines VI-4-1 1987 Chapter 2 - Calculation of Crankshaftsfor Internal Combustion Engines VI-4-2 2012 Chapter 3 - Guidelines for the Seating of Propulsion Plantsand Auxiliary Machinery VI-4-3 2010 Part 6 - Modular Certification SystemChapter 2 - Guidelines for the Inspection of Mechanicaland Electrotechnical Products VI-6-2 2009 Part 7 - Guidelines for the Performance of Type ApprovalsChapter 1 - Procedure VI-7-1 2007 Chapter 2 - Test Requirements for Electrical /Electronic Equipment and Systems VI-7-2 2012 Chapter 4 - Test Requirements for Sealing Systems ofBulkhead and Deck Penetrations VI-7-4 2003 Chapter 5 - Test Requirements for ComplexData Networks VI-7-5 2013 Chapter 6 - Test Requirements for Electrical Machinery VI-7-6 1999 Chapter 7 - Test Requirements for Statical Converterswith Semi-Conductors VI-7-7 1999 Chapter 8 - Test Requirements for Components andSystems of Mechanical Engineering andOffshore Technology VI-7-8 2013Rules & GuidelinesCode Edition Part 8 - Electrical EngineeringChapter 5 - Guidelines for the Restoration of ElectricalSystems following Damage caused by Fire,Water and Extinguishing Agents VI-8-5 1998 Part 9 - Materials and WeldingChapter 2 - Guidelines for the Fabrication and Inspectionof Welded Pipelines of Copper-Nickel-Alloys VI-9-2 2007 Chapter 5 - Guidelines for the Approval of ReactionPlastics and Composite Materials for theSeating and Repair of Components VI-9-5 2006 Part 10 - Corrosion ProtectionChapter 1 - Coating of Ballast Water Tanks VI-10-1 2010 Chapter 2 - Guidelines for Corrosion Protection andCoating Systems VI-10-2 2010 Chapter 3 - Corrosion Protection ofCrude Oil Cargo Tanks VI-10-3 2013 Part 11 - Other Operations and SystemsChapter 2 - Preliminary Guidelines for Safe Return toPort Capability of Passenger Ships VI-11-2 2009 Chapter 3 - Guidelines for Sea Trials of Motor Vessels VI-11-3 2012 Chapter 4 - Chamber Systems for Tunnelling VI-11-4 2011 Chapter 5 - Guidelines for Extended Dry-Dock Interval VI-11-5 2013 Chapter 6 - Guidelines for the Preparation ofDamage Stability Calculations andDamage Control Documentation on Board VI-11-6 2008 Chapter 7 - Guidelines for Loading Computer Systems VI-11-7 2013 Chapter 8 - Guidelines and Approval Procedure for"In Service Inclining Test Systems" (ISITS)VI-11-8 2000 Chapter 9 - Guidelines for theCondition Assessment Program VI-11-9 2010 Chapter 10 - Guidelines on Ballast Water Management VI-11-10 1 Sep. 2013 Chapter 10 - Guidelines on Ballast Water Management VI-11-10 2001 Chapter 11 - Guidelines for the Preparation of Operatingand Maintenance Manuals for Shell Doors VI-11-11 2005 Part 12 - Environment ProtectionChapter 1 - Guidelines for the EnvironmentalService System VI-12-1 2012 Chapter 2 - Guidelines for Ship Recycling RelatedCertification Processes VI-12-2 2012 Part 13 - Energy EfficiencyChapter 1 - Guidelines for Determination of the EnergyEfficiency Design Index VI-13-1 2012Rules & GuidelinesCode Edition IACS Common Structural RulesBulk CarriersIACS Common Structural Rules, consolidated version, effective 1 July 2012 Double Hull Oil TankersIACS Common Structural Rules, consolidated version, effective 1 July 2012 EU RO - Recognised OrganisationsEU RO Mutual Recognition of Type Approval Certificates 1 July 2013。
货代常用英文

Freight Payable At Destination 到付运费
Back Freight 退货运费
Fixed Price 固定价格
Comm. Commission 佣金
Rebate 回扣/折扣
Drayage charge: made for local hauling by dray or truck 拖运费
Shipper’s Export Declaration 货主出口申报单
Shipping Advice 装运通知(似舱单 NVOCC用)
Manifest information 舱单信息
FCN Freight Correction Notice 舱单更改单(通知)
Surrender O B/L copies for consignment 交回提单副本
Release Note receipt signed by customer acknowledging delivery of goods 货物收讫单
(二)订舱
Booking 订舱
Booking Note 订舱单
Booking Number 订舱号
Dock Receipt Fra bibliotek站收据 M/F (Manifest ) :a manifest that lists only cargo, without freight and charges 舱单
Cable/Telex Release 电放
A Circular Letter 通告信/通知书
PIC: Person in Charge 具体负责操作人员
The said party 所涉及的一方
GL相关规范

GL Head Office means the head office or designated head office department in charge of dealing with Rules and Classification particulars. 1.2.3 Rules
Surveyor means technical staff acting on behalf of GL to perform tasks in relation to Classification and survey duties. 1.2.9 Survey
–
1.2.7
1.2.1 The following general definitions are used in these Rules. 1.2.2 GL Head Office
Period of Class means the period starting either from the date of the initial Classification or from the credited date of the last Class Renewal Survey, and expiring at the limit date assigned for the next Class Renewal Survey. 1.2.8 Surveyor
1.1.1 The Rules for Classification and surveys of inland navigation vessels cover the Classification of inland navigation vessels as defined in 1.2.5. 1.1.2 The Rules published by GL give the requirements for the assignment and the maintenance of Class for inland navigation vessels. 1.1.3 Class assigned to a vessel reflects the discretionary opinion of GL that the vessel, for declared conditions of use and within the relevant time frame, complies with the Rules applicable at the time the service is rendered. 1.1.4 General Terms and Conditions valid at the time of signing of the contract with the party ordering the classification apply. 1.2 General definitions
海康威视DVR设备操作手册说明书
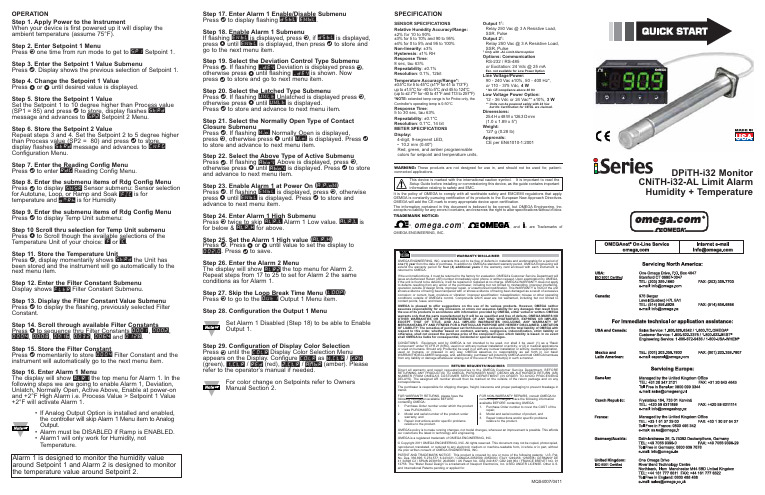
Step 17. Enter Alarm 1 Enable/Disable Submenu Press d to display flashing DSBL / ENBL .Step 18. Enable Alarm 1 SubmenuIf flashing ENBL is displayed, press a , if DSBL is displayed,press b until ENBL is displayed, then press d to store and go to the next menu item.Step 19. Select the Deviation Control Type Submenu Press d . If flashing _DEV Deviation is displayed press a ,otherwise press b until flashing _DEV is shown. Now press d to store and go to next menu item.Step 20. Select the Latched Type SubmenuPress d . If flashing UNLT Unlatched is displayed press a ,otherwise press b until UNLT is displayed.Press d to store and advance to next menu item.Step 21. Select the Normally Open Type of Contact Closure SubmenuPress d . If flashing N.o.Normally Open is displayed,press a , otherwise press b until N.o.is displayed. Press d to store and advance to next menu item.Step 22. Select the Above Type of Active Submenu Press d . If flashing ABoV Above is displayed, press a ,otherwise press b until ABoV is displayed. Press d to store and advance to next menu item.Step 23. Enable Alarm 1 at Power On (A.P.oN )Press d . If flashing ENBL is displayed, press a , otherwise press b until ENBL is displayed. Press d to store and advance to next menu item.Step 24. Enter Alarm 1 High SubmenuPress a twice to skip ALR.L Alarm 1 Low value. ALR.L is for below & ALR.H for above.Step 25. Set the Alarm 1 High value (ALR.H )Press d . Press b or c until value to set the display to 002.0. Press d to save.Step 26. Enter the Alarm 2 MenuThe display will show ALR2the top menu for Alarm 2.Repeat steps from 17 to 25 to set for Alarm 2 the same conditions as for Alarm 1.Step 27. Skip the Loop Break Time Menu (LOOP )Press a to go to the OUT1Output 1 Menu item.Step 28. Configuration the Output 1 MenuSet Alarm 1 Disabled (Step 18) to be able to Enable Output 1.Step 29. Configuration of Display Color Selection Press a until the COLR Display Color Selection Menu appears on the Display. Configure COLR as N.CLR /GRN (green), 1.CLR / RED (red), 2.CLR /AMBR (amber). Please refer to the operator’s manual if needed.For color change on Setpoints refer to Owners Manual Section 2.MQS4007/0411SPECIFICATIONSENSOR SPECIFICATIONSRelative Humidity Accuracy/Range:±2% for 10 to 90%±3% for 5 to 10% and 90 to 95%±4% for 0 to 5% and 95 to 100%Non-linearity : ±3%Hysteresis: ±1% RH Response Time :8 sec, tau 63%Repeatability : ±0.1%Resolution : 0.1%, 12bitTemperature Accuracy/Range*:±0.5°C for 5 to 45°C (±1°F for 41 to 113°F); up to ±1.5°C for -40 to 5°C and 45 to 124°C (up to ±2.7°F for -40 to 41°F and 113 to 257°F)*NOTE:extended temp range is for Probe only, the Controller’s operating temp is 0-50°CResponse Time : 5 to 30 sec, tau 63%Repeatability : ±0.1°C Resolution : 0.1°C, 14 bit METER SPECIFICATIONS Display:4-digit, 9-segment LED, •10.2 mm (0.40")Red, green, and amber programmable colors for setpoint and temperature units.Output 1†:Relay 250 Vac @ 3 A Resistive Load,SSR, Pulse Output 2†:Relay 250 Vac @ 3 A Resistive Load,SSR, Pulse †Only with -AL Limit Alarm optionOptions:Communication RS-232 / RS-485or Excitation:24 Vdc @ 25 mAExc. not available for Low Power OptionLine Voltage/Power:90 - 240 Vac ±10%,50 - 400 Hz*, or 110 - 375 Vdc, 4 W* No CE compliance above 60 HzLow Voltage Power Option:12 - 36 Vdc or 24 Vac** ±10%, 3 W**Units can be powered safely with 24 Vac but No Certification for CE/UL are claimed.Dimensions:25.4 H x 48 W x 126.3 D mm (1.0 x 1.89 x 5")Weight:127 g (0.28 lb)Approvals:CE per EN61010-1:2001It is the policy of OMEGA to comply with all worldwide safety and EMC/EMI regulations that apply.OEMGA is constantly pursuing certification of its products to the European New Approach Directives.OMEGA will add the CE mark to every appropriate device upon certification.The information contained in this document is believed to be correct, but OMEGA Engineering,Inc.accepts no liability for any errors it contains, and reserves the right to alter specifications without notice.TRADEMARK NOTICE:®,®,, andare Trademarks ofOMEGA ENGINEERING, INC.®This Quick Start Reference provides informationon setting up your instrument for basic operation.The latest complete Communication and OperationalManual as well as free Software and ActiveX Controlsare available at /specs/iseriesor on the CD-ROM enclosed with your shipment. SAFETY CONSIDERATIONThe instrument is a panel mount device protected in accordance with EN61010-1:2001. Remember that the unit has no power-on switch. Building installation should include a switch or circuit-breaker that must be compliant to IEC 947-1 and 947-3.SAFETY:•Do not exceed voltage rating on the label located onthe top of the instrument housing.•Always disconnect power before changing signal andpower connections.•Do not use this instrument on a work bench withoutits case for safety reasons.•Do not operate this instrument in flammable orexplosive atmospheres.•Do not expose this instrument to rain or moisture. EMC:•Whenever EMC is an issue, always use shielded cables.•Never run signal and power wires in the same conduit.•Use signal wire connections with twisted-pair cables.•Install Ferrite Bead(s) on signal wire close to theinstrument if EMC problems persist.MOUNTINGPanel Mounting Instruction:ing the dimensions from the panel cutout diagramshown above, cut an opening in the panel.2.Insert the unit into the opening from the front of thepanel, so the gasket seals between the bezel and thefront of the panel.3.Slide the retainer over the rear of the case and tightenagainst the backside of the mounting panel.。
船级社(Classification

船级社(Classification society)船级社(Classification society)船级社是⼀个建⽴和维护船舶和离岸设施建造和操作技术标准的⾮政府组织。
通常通过对于船舶监造和定期检查来确保航海设备满⾜其规范。
责任船级社设定技术规范,确认船舶和其他航海设备设计满⾜规范要求。
在船舶建造和调试期间进⾏监控,并在设备和船舶运营期内进⾏持续检查以确保船舶和设施持续符合规范要求。
船级社同样对于⽯油平台,离岸设施和潜艇进⾏船检。
船检过程涉及的柴油发动机,重要的舰载泵和其他重要机械。
验船师进⾏船检以确保该船舶,其设备和机械建造以及维护符合其⼊级船级社的规范要求。
历史⼗⼋世纪中,伦敦的商⼈,船东和船长经常聚集在爱德华劳埃德(Edward Lloyds)咖啡馆谈论⼋卦,分享航⾏见闻已经从事交易。
⼤部分的船舶和货物保险都在此地办理。
不久,保险业就意识到需要对于船舶的质量进⾏了解。
在1760年注册协会成⽴,发展成世界上第⼀个船级社劳⽒船级社,并开始对船舶开始检验和登记⼊级,并开始对于船舶和设备进⾏分类。
当时将船体技术状况划分为五类:A(最好)、E(较好)、I(中等)、O(较坏)、U(最坏);⼜将所帆、锚等设备分为三类:G(好)、 M(中)、B(坏)。
随着时间的推移,G、M和B被1,2,3所替代。
这也是现在众所周知的代表最⾼等级的 A1的由来。
该系统的⽬的是,对船舶安全性,适航性的风险评估。
劳⽒船级社在1764年出版了第⼀版船舶登记簿,并在1764年到1766年间使⽤。
必维船级社(Bureau Veritas)与1828年在安特卫普成⽴,并与1832年搬迁到巴黎。
其他船级社§ 美国船级社 ABS American Bureau of Shipping§ 法国船级社 BV Bureau Veritas§ 中国船级社 CCS China Classification Society§ 中国验船中⼼ CR China Corporation Register of Shipping§ 挪威船级社 DNV Det Norske Veritas§ 德国劳⽒船级社 GL Germanischer Lloyd§ 韩国船级社 KR Korean Register of Shipping§ 英国劳⽒船级社 LR Lloyd's Register§ ⽇本海事协会 NK Nippon Kaiji Kyokai (ClassNK)§ 意⼤利船级学会 RINA Registro Italiano Navale§ 俄罗斯船级社 RS Russian Maritime Register of ShippingA classification society is a nongovernment organization that establishes and maintains technical standards for the construction and operation of ships and off shore structure. The society will also validate that construction is according to these standards and carry out regular surveys in service to ensure compliance with the standards.ResponsibilityClassification societies set technical rules, confirm that designs and calculations meet these rules, survey ships and structures during the process of construction and commissioning, and periodically survey vessels to ensure that they continue to meet the rules. Classification societies are also responsible for classing oil platform, other offshore structures, and submarines. This survey process covers diesel engines, important shipboard pumps and other vital machinery. Classification surveyors inspect ships to make sure that the ship, its components and machinery are built and maintained according to the standards required for their class.HistoryIn the second half of the 18th century, London merchants, ship-owners, and captains often gathered at Edward Llord coffee house to gossip and make deals including sharing the risks and rewards of individual voyages. This became known as underwriting after the practice of signing one's name to the bottom of a document pledging to make good a portion of the losses if the ship didn’t make it in return for a portion of the profits. It did not take long to realize that the underwriters needed a way of assessing the quality of the ships that they were being asked to insure. In 1760, the Register Society was formed —the first classification society and which would subsequently become Llord's Register — to publish an annual register of ships. This publication attempted to classify the condition of the ship’s hull and equipment. At that time, an attempt was made to classify the condition of each ship on an annual basis. The condition of the hull was classified A, E, I, O or U, according to the state of its construction and its adjudged continuing soundness (or lack thereof). Equipment was G, M, or B: simply, good, middling or bad. In time, G, M and B were replaced by 1, 2 and 3, which is the origin of the well-known expression 'A1', meaning 'first or highest class'. The purpose of this system was not to assess safety, fitness for purpose or seaworthiness of the ship. It was to evaluate risk.Samuel Plimsoll pointed out the obvious downside of insurance:The ability of ship-owners to insure themselves against the risks they take not only with their property, but with other peoples’lives, is itself the greatest threat to the safe operation of ships.The first edition of the Register of Ships was published by Lloyd's Register in 1764 and was for use in the years 1764 to 1766.Bureau Veritas (BV) was founded in Anwert in 1828, moving to Paris in 1832. Lloyd's Register reconstituted in 1834 to become 'Lloyd's Register of British and Foreign Shipping'. Where previously surveys had been undertaken by retired sea captains, from this time surveyors started to be employed and Lloyd's Register formed a General Committee for the running of the Society and for the Rules regarding ship construction and maintenance, which began to be published from this time.In 1834, the Register Society published the first Rules for the survey and classification of vessels, and changed its name to Lloyds Register of Shipping. A full time bureaucracy of surveyors (inspectors) and support people was put in place. Similar developments were taking place in the other major maritime nations.Adoption of common rules for ship construction by Norwegian insurance societies in the late 1850s led to the establishment of Det Norske veritas (DNV) in 1864. Then after RINA was founded in Genoa, Italy in 1861 under the name Registro Italiano, to meet the needs of Italian maritime operators. Six years later Germanischer Lloyd (GL) was formed in 1867 and Nippon Kaiji Kyokai (ClassNK) in 1899. The Russian Maritime Register of Shipping (RS) was an early offshoot of the River Register of 1913.As the classification profession evolved, the practice of assigning different classifications has been superseded, with some exceptions. Today a ship either meets the relevant class society’s rules or it does not. As a consequence it is either 'in' or'out' of 'class'. Classification societies do not issue statements or certifications that a vessel is 'fit to sail' or 'unfit to sail', merely that the vessel is in compliance with the required codes. This is in part related to legal liability of the classification society.However, each of the classification societies has developed a series of notations that may be granted to a vessel to indicate that it is in compliance with some additional criteria that may be either specific to that vessel type or that are in excess of the standard classification requirements. See Ice class as an example.。
DNV GL Rules for Ships - Summary

What does Part 1 provide? General Regulations enhances a clear understanding of the Classification concept by DNV GL. Responsibilities of both customers and DNV GL are more transparent. Improved structure of complete service offering. Clear communication of documentation and certification requirements towards yards, designers and manufacturers throughout the Rules.
9
DNV GL ©
Table of Contents Ch.1 Ch.2 Ch.3 Ch.4 General requirements for materials Metallic materials Non-metallic materials Fabrication and testing
Myers-Briggs Type Indicator 测评手册说明书
Myers-Briggs Type Indicator (MBTI)by James Lani/myers-briggs-type-indicator-mbti/Click here for to get help with your Thesis or Dissertation.Click here for FREE Thesis and Dissertation resources (templates, samples, calculators).The Myers-Briggs Type Indicator is commonly used instrument for the evaluation of a person’s personality and behavior. Currently there exist five forms of MBTI: Form M, Form M self-scorable, Form G, Form G self-scorable, and Form Q. The test has been translated into 21 different languages and has established itself as a useful method in improving performance, choosing careers, and reducing workplace conflict.AuthorsIsabel Briggs MyersValidity and ReliabilityBased on the most recent forms of MBTI (M and Q), the internal consistency was .90 for Form M and .77 for Form Q. A sample of 3,009 people representing a national sample was used for Form M, whereas a nationally representative sample of 1,378 was used for Form Q. The test is given to 2 million people every year; in addition, the test is used by companies and researchers. The MBTI is an established instrument used for the analysis of personality.Obtaining the MBTICPPAdministration, Analysis and ReportingStatistics Solutions consists of a team of professional methodologists and statisticians that can assist the student or professional researcher in administering the survey instrument, collecting the data, conducting the analyses and explaining the results.For additional information on these services, click here.Dissertations Using the Myers-Briggs Type IndicatorBelow is a list of dissertations that use the MBTI. The full version of these dissertations can be found using ProQuest.Li, Y. (2003). Assessment of nursing college students learning styles in taiwan using the myers-briggs type indicator. University of Southern California).Stauning-Santiago, B. (2003). Identification of at-risk nursing students using the myers-briggs type indicator and hollands vocational preference inventory. State University of New York at Albany).Horstein, C. A. (1995). Identification of personality types of associate degree nursing students and faculty based on the myers-briggs type indicator. Pepperdine University).Puyleart, B. L. (2006). Learning styles of baccalaureate nursing students using the myers-briggs type indicator. Marian College of Fond du Lac).Zitkus, B. S. (2008). The relationship among registered nurses personality type, weight status, weight loss motivating factors, weight loss regimens, and successful or unsuccessful weight loss. Dowling College).ReferencesSchaubhut, N. A., Thompson, R. C., & O’Hara, J. M. (2008). The influence of personality of where people choose to work. Boston, MA: Poster presented at the Annual Convention of the American Psychological Association, August 14-17, 2008.O’Hara, J. M., Thompson, R. C., Donnay, D. A. C., Morris, M. L., & Schaubhut, N. A. (August, 2006). Correlating the newly revised Strong Interest Inventory® with the MBTI®. New Orleans, LA: Poster presented at the American Psychological Association Annual Conference.Quenk, N. L., Hammer, A. L., & Majors, M. S. (2001). MBTI® Step II Manual. Mountain View, CA: CPP, Inc. View_______________________________________________。
glrp-e

Rules & Guidelines 2011Edition CodeGeneralUser GuideLicence Agreement and Software Order DocumentI - Ship TechnologyPart 0 - Classification and Surveys2011Classification and Surveys I-0-0Part 1 - Seagoing ShipsChapter 1 - Hull Structures I-1-120112011Rule Change Notice Chapter 1, Section 14, I Nov2011Chapter 2 - Machinery Installations I-1-22011Chapter 3 - Electrical Installations I-1-32011Chapter 4 - Automation I-1-42011Chapter 5 - Structural Rules for Container Ships I-1-52011Rule Change Notice Chapter 5, Section 14, H NovSupplementary Rules for Application of Steelwith Yield Strength of 460 N/mm² 20092008Chapter 6 - Liquefied Gas Carriers I-1-62008Chapter 7 - Chemical Tankers I-1-72007Chapter 8 - Fishing Vessels I-1-81993Chapter 9 - Oil Recovery Vessels I-1-92000Chapter 10 - Refrigerating Installations I-1-101999Chapter 11 - One-Man Control Console I-1-112005Chapter 12 - Chemical Recovery Vessels I-1-12Chapter 14 - Redundant Propulsion and2000Steering Systems I-1-142010Chapter 15 - Dynamic Positioning Systems I-1-15Chapter 16 - Harmony Class – Rules on Rating Noise and Vibrationfor Comfort, Cruise Ships (v ≤ 25 kn) I-1-16 2003Chapter 17 - Guidelines forMachinery Condition Monitoring I-1-17 2008Chapter 18 - Harmony Class – Rules on Rating Noise and Vibrationfor Comfort, Cruise Ships (v > 25 kn) I-1-18 2004Chapter 19 - Guidelines for the Carriage ofRefrigerated Containers on Board Ships I-1-19 2003Chapter 20 - Stowage and Lashing of Containers I-1-20 20072005Chapter 21 - Ventilation I-1-21Chapter 22 - Guidelines for the Construction ofPolar Class Ships I-1-222008Chapter 23 - Harmony Class - Rules on Rating Noise andVibration for Comfort,Cargo Ships I-1-23 2009Rules & Guidelines 2011Edition CodePart 2 - Inland Navigation Vessels2011Chapter 1 - Classification and Surveys I-2-12011Chapter 2 - Hull Design and Construction I-2-2Chapter 3 - Machinery, Systems and Electricity I-2-3 2011Chapter 4 - Additional Requirements for Notations I-2-4 2011Part 3 - Special CraftChapter 1 - High Speed Craft I-3-120022003Chapter 2 - Yachts ≥ 24 m I-3-22003Chapter 3 - Yachts and Boats up to 24 m I-3-3Chapter 4 - Guidelines for Lifeboats and Rescue Boats I-3-4 2008Chapter 5 - Floating Docks I-3-51993Chapter 6 - Preliminary Rules for Patrol Boats I-3-6 2010Part 4 – Rigging TechnologyChapter 1 - Tall Ship Rigs I-4-11997Chapter 2 - Guidelines for Design and Construction2009of Large Modern Yacht Rigs I-4-2Chapter 3 - Guidelines for the Type Approval ofCarbon Strand and PBO Cable Rigging2008for Sailing Yachts I-4-3Part 5 - Underwater TechnologyChapter 1 - Diving Systems and Diving Simulators I-5-1 20092009Chapter 2 - Manned Submersibles I-5-2Chapter 3 - Unmanned Submersibles (ROV,AUV)and Underwater Working Machines I-5-3 2009Part 6 – Offshore Service VesselsChapter 1 - Hull Structures I-6-1Dec.2011152010Chapter 1 - Hull Structures I-6-12011Dec.15Chapter 2 - Machinery and Systems I-6-2II - Materials and WeldingPart 1 - Metallic MaterialsChapter 1 - Principles and Test Procedures II-1-1 20092009Chapter 2 - Steel and Iron Materials II-1-22009Chapter 3 - Non-Ferrous Metals II-1-32009Chapter 4 - Equipment II-1-4Chapter 5 - Materials for Propeller Fabrication II-1-5 2009Chapter 6 - Special Materials for Naval Ships II-1-6 2003Part 2 - Non-metallic MaterialsChapter 1 - Fibre Reinforced Plastics and Bonding II-2-1 20062006Chapter 2 - Wooden Materials II-2-2Rules & Guidelines 2011Edition CodeChapter 3 - Guidelines for Elastomeric Adhesives and2002Adhesive Joints II-2-3Part 3 - WeldingChapter 1 - General Requirements,Proof of Qualifications, Approvals II-3-1 2000Chapter 2 - Design, Fabrication and Inspection2000of Welded Joints II-3-2Chapter 3 - Welding in the Various Fields2000of Application II-3-3Rule Change Notice Chapter 3, Section 1, F March 2008III – Naval Ship TechnologyPart 0 - Classification and Surveys2003Classification and Surveys III-0-0Part 1 - Surface ShipsChapter 1 - Hull Structures and Ship Equipment III-1-1 20042004Chapter 2 - Propulsion Plants III-1-22003Chapter 3a - Electrical Installations III-1-3a2003Chapter 3b - Automation III-1-3bChapter 4 - Ship Operation Installations and2004Auxiliary Systems III-1-4Part 2 –Sub-Surface Ships2008Chapter 1 - Submarines III-2-1Chapter 2 - Remotely Operated Underwater Vehicles III-2-2 2005Chapter 3 - Guidelines for Air Independent Power2005Systems for Underwater Use III-2-3IV – Industrial ServicesPart 6 - Offshore TechnologyChapter 1 - Classification, Certification and Surveys IV-6-1 20072007Chapter 2 - Mobile Offshore Units IV-6-22007Chapter 3 - Fixed Offshore Installations IV-6-32007Chapter 4 - Structural Design IV-6-42007Chapter 5 - Machinery Installations IV-6-52007Chapter 6 - Electrical Installations IV-6-6Chapter 7 - Guideline for the Construction of Fixed OffshoreInstallations in Ice Infested Waters IV-6-7 2005Chapter 8 - Guideline for the Certification of2011Blow-Out Preventers IV-6-8Rules & Guidelines 2011Edition CodeChapter 9 - Guideline for Personnel Transfers by Means2011of Lifting Appliances IV-6-9V - Analysis TechniquesPart 1 – Hull Structural Design AnalysesChapter 1 - Guidelines for Global Strength Analysis2011of Container Ships V-1-1Chapter 2 - Guidelines for Fatigue Strength Analysesof Ship Structures V-1-22004Part 2 – Risk AnalysesChapter 1 - Guidelines for the Analysis of Alternative2009Design and Arrangements V-2-1VI - Additional Rules and GuidelinesPart 1 – Container TechnologyChapter 1 - Guidelines for the Construction, Repair andTesting of Freight Containers VI-1-11995Part 3 – Machinery InstallationsChapter 1 - Guidelines for the Use of2010Gas as Fuel for Ships VI-3-1Chapter 4 - Guidelines for Equipment on2008Fire Fighting Ships VI-3-4Chapter 5 - Guidelines for Design, Equipment and Testingof Gas Welding Installations on2008Seagoing Ships VI-3-5Chapter 6 - Guidelines for the Construction,Equipment and Testing of Closed2008Fuel Oil Overflow Systems VI-3-6Chapter 11 - Guidelines for the Use of Fuel Cell Systems2003on Board of Ships and Boats VI-3-11Part 4 – Diesel EnginesChapter 1 - Guidelines for Mass Produced Engines VI-4-1 1987Chapter 2 - Guidelines for the Calculation of Crankshaftsfor Internal Combustion Engines VI-4-2 1995Chapter 3 - Guidelines for the Seating of Propulsion Plantsand Auxiliary Machinery VI-4-3 2010Part 5 – PumpsChapter 1 - Guidelines for the Design, Construction and2007Testing of Pumps VI-5-1Rules & Guidelines 2011Edition CodePart 6 – Modular Certification SystemChapter 2 - Guidelines for the Inspection of Mechanical2009and Electrotechnical Products VI-6-2Part 7 - Guidelines for the Performance of Type ApprovalsChapter 1 - Procedure VI-7-12007Chapter 2 - Test Requirements for Electrical /Electronic Equipment and Systems VI-7-2 2003Chapter 4 - Test Requirements for Sealing Systems ofBulkhead and Deck Penetrations VI-7-4 2003Chapter 6 - Test Requirements for Electrical Machinery VI-7-6 1999Chapter 7 - Test Requirements for Statical Converters1999with Semi-Conductors VI-7-7Chapter 8 - Test Requirements for Components andSystems of Mechanical Engineering and2008VI-7-8TechnologyOffshorePart 8 – Electrical EngineeringChapter 5 - Guidelines for the Restoration of ElectricalSystems following Damage caused by Fire,Water and Extinguishing Agents VI-8-5 1998Part 9 – Materials and WeldingChapter 2 - Guidelines for the Fabrication and Inspectionof Welded Pipelines of Copper-Nickel-Alloys VI-9-2 2007Chapter 5 - Guidelines for the Approval of ReactionPlastics and Composite Materials for theSeating and Repair of Components VI-9-5 2006Part 10 – Corrosion ProtectionChapter 1 - Coating of Ballast Water Tanks VI-10-1 2010Chapter 2 - Guidelines for Corrosion Protection and2010Coating Systems VI-10-2Chapter 3 - Corrosion Protection of2006Crude Oil Cargo Tanks VI-10-3Part 11 - Other Operations and SystemsChapter 2 - Preliminary Guidelines for Safe Return toPort Capability of Passenger Ships VI-11-2 2009Chapter 3 - Guidelines for Sea Trials of Motor Vessels VI-11-3 2007Chapter 4 - Chamber Systems for Tunnelling VI-11-4 2011Chapter 5 - Guidelines for Extended Dry-Dock Interval VI-11-5 2010Chapter 6 - Guidelines for the Preparation ofDamage Stability Calculations andDamage Control Documentation on Board VI-11-6 2008Chapter 7 - Guidelines for Loading Computer Systems VI-11-7 2005Rules & Guidelines 2011Edition CodeChapter 8 - Guidelines and Approval Procedure for"In Service Inclining Test Systems" (ISITS) VI-11-8 2000Chapter 9 - Guidelines for theCondition Assessment Program VI-11-9 2010Chapter 10 - Guidelines on Ballast Water Management VI-11-10 2001Chapter 11 - Guidelines for the Preparation of Operatingand Maintenance Manuals for Shell Doors VI-11-11 2005Part 12 - Environment ProtectionChapter 1 - Guidelines for the Environmental2011Service System VI-12-1IACS Common Structural Rules andComplementary Rules of Germanischer LloydBulk CarriersIACS Common Structural Rules January20062010IACS Corrigenda and Rule Change Notices April2008JulyIACS Common Structural Rules, consolidated version, effective 12009JulyIACS Common Structural Rules, consolidated version, effective 12010JulyIACS Common Structural Rules, consolidated version, effective 1GL Complementary Rules2011Double Hull Oil TankersIACS Common Structural Rules January20062010IACS Corrigenda and Rule Change Notices April2008JulyIACS Common Structural Rules, consolidated version, effective 12009JulyIACS Common Structural Rules, consolidated version, effective 12010JulyIACS Common Structural Rules, consolidated version, effective 1GL Complementary Rules2011。
DNV GL智能船舶入级指南要点
2019年12月JOURNAL OF SHIP DESIGN December2019DNV GL智能船舶入级'南要点朱兵,翁爽(上海船舶研究设计院,上海201203)[摘要]随着智能船舶技术的兴起&相关的法规和规范也紧随该技术发展不断革新,促进船舶行业向智能化方向快速发展$ DNV GL船级社已发布了智能船舶入级指南,并将其入级符号归类为描述性符号$以实船入级为基础,介绍该入级指南在技术(审核、认证、检验等方面的要求及方法,以期对未来的智能船舶设计有所帮助$[关键词]智能船舶;挪威船级社;入级指南;描述性符号[中图分类号]U692.7+2[文献标志码]A[文章编号"1001-4624(2019)02-0016-05Key Points of DNV GL Class Guideline for Smart ShipZHU Bing,WENG Shuang(Shanghai Merchant Ship Design and Research Institute,Shanghai201203,China)Abstract:With the rise of smart ship technologies&the relevant regulations and rules have also been continuously innovated to follow the development of technology&promoting the rapid development of the shipbuilding industry towards intelligence.DNV GL class has issued the guideline for smart ship and classified the notations as descriptive ones.Based on the actual ship classification&the requirements and methods of the class guideline were introduced in such aspects as technology&approval&certification and inspection etc.&which was expected to be helpful to the smart ship classification design in the future.Keywords:smart ship;DNV GL;class guideline;descriptive notation0前言伴随智能技术在智能电网、智能家、智能交通、智的向,目,智能技术已进入事行业$其能高为的期能,智能船舶技术速发展的态势$DNV GL船舶「这一发展,201811月了《智能船舶描述性符号入级指>[1]。
各主要船级社最新环保入级符号对比

引起较大的设计修改和费用增加 。
暖指数 (GWP)小于 3500,并配备制冷剂回收装
Green ship ̄:T<同的绿色等级分为I、II ̄DIII级 , 等级高的包含等级低的全部 内容[2]。除了大部分为
置及泄漏探测器等 ;要求焚烧炉的容量满足给定的 计 算 方 法 ; 油 类 系 统 泄 放 收 集 要 求 等 。
底水5ppm处理和IBTs(舱底水综合管理系统 )、灰 的全球变暖指数 (GWP)小于 1 890;要求安装压 水控制、压载水处理 、 蔚系统不合生物灭杀剂 、 载水处理系统;要求舱底水 由量被处理到 5PPM
发动机排放TIE II、超低硫油、制冷剂限制等几乎 以下 ;要求灰水也进行处理 ;要求艉轴密 由不能
cLEAN符号比较特殊的要求有 :要求船舶加入 cCS的船舶应急响应服务系统 (ERS)或其他 cs 成员提供的 以程序;对空调 令藏系统设置制冷剂
作者简介 :李晚侠 (1980一),女 ,硕士,工程师,研究方向:船舶轮机专业设计。
20 船舶标准化工程师 201 5/3
I学术交流 ·标准与技术 I Academic Research
IM0已生效的要求外 ,I级额外包含了未生效的香港 CLEAN—DESIGN 是在满足 CLEA N 基础上对设计
拆船公约 ;II级额外包含了对空调冷藏系统没置制冷 提 出更高要求 ,要求满 足一 ^桥楼 (NAUT—AW 或
剂回收装置及泄漏探测器的要求 ;III级额外包含了舱 NAUT—OSV(A))要求 ;要求空调冷藏系统制冷剂
Com parison of New Class Notation for Environm ent Protection of M ain Classification Societies
211127350_挪威船级社CLEAN(DESIGN)_的标准要求及其在集装箱船轮机设计上的应用

挪威船级社CLEAN(DESIGN)的标准要求及其 在集装箱船轮机设计上的应用姚 飞1 董 越1 李 华2 段玉龙1 马天帅3(1. 中国船舶及海洋工程设计研究院 上海 200011; 2. 中国船级社江苏分社 南京 210011; 3. 海装装备项目管理中心 北京 100071)摘 要:…随着海洋环境保护的要求日益严格,各主要船级社均提出了自己的环保船级符号。
DNVGL的CLEAN…(DESIGN)…附加符号为船舶的设计、操作和设备设定相关要求,以减少排放到空气中和海洋中以及从船舶运送到岸上的有害物质对环境的影响。
CLEAN(DESIGN)是DNVGL规范中较为严格的环保符号,在近几年的集装箱船设计中鲜有应用。
某型双燃料集装箱船是取得CLEAN(DESIGN)符号的绿色船舶,在研发过程中突破了一系列设计要点,包括机舱液舱布置、生活污水处理、燃油舱保护等,达到了集装箱运输船绿色环保的新高度。
该文系统总结了CLEAN(DESIGN)符号对集装箱船轮机设计的要求,研究了该符号对集装箱运输船轮机设计的影响,结合实际项目展示了实船的设计思路和方案,提出了进一步提升集装箱运输船绿色环保水平的措施。
关键词:集装箱船;船级符号;CLEAN(DESIGN);轮机设计中图分类号:U662.1;U674.13+1………文献标志码:A………DOI:10.19423/ki.31-1561/u.2023.02.088 Standard Requirements of DNVGL CLEAN(DESIGN)and Application in Machinery Design for Container Vessel YAO Fei1 DONG Yue1 LI Hua2 DUAN Yulong1 MA Tianshuai3(1. Marine Design & Research Institute of China, Shanghai 200011, China;…2. China Classification Society Jiangsu Branch, Nanjing 210011, China;…3. Marine Equipment Project Management Center, Beijing 100071, China)Abstract: With the increasingly stringent requirements of marine environmental protection, all major classification societies have proposed their own environmental protection class notations. Among them, the additional class notation of DNVGL CLEAN(DESIGN)additional notation sets requirements for the design, operation and equipment of ships to reduce the ship’s environmental impact from air emissions, sea discharges and hazardous materials from ship to shore. The environmental notation CLEAN(DESIGN)is quite stringent in the DNVGL rules, which is rarely used in the design of container vessels in recent years. A dual-fuel container vessel is a green ship that has the notation CLEAN(DESIGN). In the process of research and development, the container vessel has broken through a series of design essentials, such as the arrangement of engine room and liquid tanks, sewage treatment and fuel tank protection, reaching a new level of green environmental protection for container vessels. This article systematically summarizes the requirements of CLEAN(DESIGN)notation for the machinery design of container vessels, and studies the influence of this notation on the machinery design of container vessels.收稿日期:2022-09-01;修回日期:…2022-09-27作者简介:姚…………飞(1993-),男,硕士,助理工程师。
STARWOOD酒店集团管理冲突建立和谐关系课程学员手册

转折一通过管理冲突建立和谐关系学员手册日期: ________________________学员: ________________________讲师: ________________________前言: 喜达屋关爱领导学院喜达屋关爱领导学院 (SCLU) 为所有员工向领导方向发展提供了重要的机会,并帮助喜达屋在日益激烈的市场竞争中,确立其坚实地位。
喜达屋关爱领导学院是为开发所有级别员工的领导能力而特别精心设计的,并旨在当员工投入到崭新的、更复杂的领导者和经理人角色时,最大限度地促成其取得成功的机会。
领导或职业转折概念对喜达屋关爱领导学院的课程设计的核心。
在每个领导转折点,员工为掌握成功进入下一个转折中所需的思维方式、知识和技能时,都面临着强大的挑战。
因此,对于员工来说,充分准备去驾驭领导转折是非常重要的。
领导转折的概念是基于沃尔特·R ·马勒的开创性的研究。
沃尔特·R ·马勒是第一个取得成功的,也是最受尊敬的职业规划大师。
在过去十年中,其职业规划理论久经验证,并为众多跨国公司所认同。
对于典型的酒店从业者来说,有四个关键的领导转折。
想要在下一个转折取得成功的员工一定要具备学习新技能、接受工作价值和管理时间的各种能力。
“如果我们真想取得竞争力,那么我们就不能只有一个在最高层的领导,我们的领导需要遍布组织的各个环节。
” Tom Monahan “你具有成为一名优秀领导者的潜质,喜达屋关爱领导学院是帮助你成为领导的第一步。
”Miguel转折一:从员工(个体贡献者)到主管(管理小型团队)。
这个阶段主要关注由做好自己分内工作到帮助他人工作的转变,需要员工开始运用其管理能力与其他员工沟通,花更多的时间帮助其他员工。
转折二:从主管(管理小型团队)到经理(管理主管)。
这个阶段越来越注重有关管理技能的提升,比如分派工作、辅导、咨询以及衡量他人工作。
转折三:从经理(管理主管)到行政委员会成员(管理各个执行部门)。
matlab中not模块的用法

matlab中not模块的用法嗨,朋友们!今天咱们来唠唠Matlab里超级有趣的not模块。
你要是玩Matlab的话,这not模块就像一把神秘的小钥匙,能打开好多逻辑判断的新大门呢!我记得我刚开始学Matlab的时候,那真叫一个晕头转向。
就像走进了一个巨大的迷宫,到处都是代码和函数,完全不知道从哪儿下手。
我有个同学,叫小李,他可比我聪明多了。
有一次我们一起研究一个程序,里面就涉及到这个not模块。
我就特别纳闷儿,看着那一堆代码,我就问小李:“这not模块到底是干啥的呀?感觉就像一个小捣蛋鬼,在代码里捣乱,我都搞不懂它。
”小李就笑了,他说:“嘿,你可别小瞧它,这not 模块啊,就像是一个逻辑世界里的反转器。
”那这个not模块到底怎么个反转法呢?在Matlab里,not模块主要是用于逻辑运算的。
比如说,我们有一个逻辑表达式,就像一个小判断题。
如果这个表达式是真的,那经过not模块一处理,就变成假的了;要是这个表达式本来是假的呢,not模块就像一个神奇的小魔法棒,一下子把它变成真的。
这就好比你本来觉得今天肯定是个大晴天,结果天气预报这个“not模块”给你来个反转,说今天会下雨,完全出乎你的意料啊!咱们来举个简单的例子吧。
在Matlab里,我们可以定义一个逻辑变量,比如说a = true。
这就好比我们在说“这个事儿是对的”。
然后呢,我们用not模块来处理这个变量,就写成not(a)。
这时候,Matlab就会返回false。
就好像有人告诉你一个事儿是真的,你用你那聪明的小脑袋里的“not模块”想了一下,就得出了相反的结论。
这是不是很神奇呢?再想象一下,你在玩一个游戏,游戏里有个规则是这样的:如果某个条件满足,你就能得到宝藏。
这个条件就可以用一个逻辑表达式来表示。
但是呢,有个小坏蛋在这个规则里加了个not模块。
那原本能让你得到宝藏的条件,现在就完全反过来了。
这就像是游戏规则突然来了个180度大转弯,让你猝不及防。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
CRS ……………………………….......… 13 CRUISER …………………………………. 38 CSR (Bulk Carrier) …………………… 16 CSR (Oil Tanker) …………………….. 17 CTC ……………………………………… 16 CTCOAT ………………………………… 16
AUT-nh …………………………………. 26 AUT-Nnh ……………………………….. 41 AUT-Z …………………………………... 26 AUX-NH ………………………………… 39
H
AUX-NM ………………………………… 42
BARGE …………………………………. 20 BC / OIL TANKER …………..………… 18 BC-A ……………………………………. 16 BC-B ……………………………………. 15 BC-C ………………………………….… 15 BULK CARRIER ………………………. 15 BWM ……………………………………. 25
2
DP1 to DP3 ……………………………… 23 DP1 to DP3 (Navy)…………………….... 42 DP = x kPa ………………………..….… 33 DREDGER …………………………….... 20 Dredger ……………………………..….. 30
E (Hull) ………………………………… 14 E (Machinery) ………………………… 26 E (Hull, Navy) ……………………….… 41 E (Machinery, Navy) …………………. 42 E01 to E04 (Hull) ……………….…..… 14 E01 to E04 (Machinery) ………...……. 26 E1 to E4 (Hull) …..…………………… 14 E1 to E4 (Machinery) ..……………… 26 EC ……………………………………….. 24 EDIBLE OIL TANKER ………………… 17 EF (Hull) …………………………..….. 14 EF (Machinery) ……………………….. 26 ENVIRONMENTAL PASSPORT …….. 23 EP ……………………………………… 23 EQUIPPED FOR CARRIAGE OF CARS 19 EQUIPPED FOR CARRIAGE OF
Character of Classification, Notation
Page
» ………………………………….….…. 12 » (Inland Navigation Vessel) ……..… 29 » (Navy) ……………………………… 37 º …………………………………….….. 12 º (Inland Navigation Vessel)…………. 29 º (Navy) ……………………………… 37 À ……………………………………….. 12 À (Inland Navigation Vessel)……….. 29 ¾ ………………………………….….…. 12 ¾ (Navy) ……………………………... 37 ¼ ………………………………………… 13 ¼ (Navy) ……………………………… 37 ¿ ……………………………………..…. 13 ¿ (Navy) ………………………..……… 37 »100A5 ………………………………..... 35 » MC Y …………………………………... 35 (-) ………………………………………... 30
Damage stability ……………………… 32 DBC …………………………………….. 21 DEG ……………………………………... 44 DESTROYER ………………………...… 38 DG ……………………………………….. 21 DG (HSC Code 7.17) ………………….. 21 DG (Inland Navigation Vessel) …..…. 33 DGD …………………………………..…. 34 DGL ……………………………….….…. 34 DI ………………………………………... 44 Double hull ……………………………..3 GENERAL CARGO SHIP ………..…... 15 GRAB[X] …….………………………… 16 Grabloading ……………………………. 33
HATCHCOVERLESS …………………. 15 HC(2/3) ……………………………….… 23 HC(hcpass/hccrew) ………………………. 23
100A5 …………………………………... 12 100Ap ………………………………….. 29 100Np …………………………………… 37 1R ………………………………………. 32 2R ………………………………………. 33 70A1 …………………………………….. 12 80A2 ………………………………….…. 12 90A3 …………………………………….. 12 I, II, III, IV, V (Range of service)…… 35
vehicles …………………………….… 33 EQUIPPED WITH BOW RUDDER ….. 24 ERS ……………………………………... 25 ERS (Navy)……………………………… 41 ESP ……………………………………… 23 EXP (Hull) ………..…..……………….. 25 EXP (Machinery) ………………….….. 28 EXP (Hull, Navy) ……………………... 39 EXP (Machinery, Navy) …………….... 43
AC1 ……………………………………... 39 ACS ……………………………….…….. 39 ACTIVE ESCORT TUG ………….…. 19 ADN ……………………………………... 32 ADNR …………………………………… 32 AHTS ………………………………….… 24 AIP-xxx (Navy) ……………………….. 43 AIRCRAFT CARRIER ………………... 38 AL ……………………………………….. 31 ALUMINIUM ………………………….… 24 ALUMINIUM (Navy)………………….… 40 A-MC ………………………………….… 12
CHEMICALS IN BULK ………………. 18 EQUIPPED FOR CARRIAGE OF
CONTAINERS …………………….…. 15 EQUIPPED FOR CARRIAGE OF
RO-RO CARGO …………………….. 15 Equipped for transport of containers.. 33 Equipped for transport of wheeled
a-mc ……………………………..…... 12
AMPHIBIOUS WARFARE SHIP …..… 38 ARC1 to ARC4 (Hull) ….………….…… 15 ARC1 to ARC4 (Machinery) ….……… 26 ASPHALT TANKER …………..….…… 17 AUT ……………………………………... 25 AUT-N ……………………………….….. 41
Heavy cargo [ … ] …………………..… 33
HIGHER STRENGTH HULL STRUCTURAL STEEL …………..…. 24
HIGHER STRENGTH HULL STRUCTURAL STEEL (Navy)…..…. 40
{holds a, b, … may be empty} …….... 16 HLP ……………………………………… 25 HOPPER BARGE …………….……….. 21 Hopper barge ………………………….. 30 Hopper dredger ……………………….. 30 Hopper suction dredger …………….. 30 HS ……………………………………….. 32 HSC ………………………………….….. 22 HSC-CARGO …………………………... 22 HSC-N …………………………………... 39 HSC-PASSENGER A ……………….… 22 HSC-PASSENGER B …………………. 22 HSDE ……………………………………. 22 HYDROFOIL …………………………… 20 HYDROFOIL (Navy) ……………….… 38