一种单芯片GPS接收机的硬件设计
基于单芯片的GPS接收机硬件设计
G S全 球 定 位 系 统) 展 到今 天 ,其 用 途 晶振 ,支持 在 3 P( 发 G、G M 、C MA电 话 中应 用 。 S D 越 来 越 广 泛 , 而技 术 的 进 步 和用 户 需 求 也不 断 片 上 的 L NA允许 连 接无 源 的或 者有 源 的 天线 到 推动G S P 系统 的增 强 。 目前美 国正 在 致 力于 G S H mme ed P a h r a 。标 准 的 U R A T端 口、S I F P 和 C接 BokI系统 的现 代化 和 “ P Ⅲ ”计 划 , 旨 口 ,使 其 可 以 与任 何 一 种 目标 系 统 进 行 连 接 。 l I c G S一 在全 面 改 善 G S 生命 力 、 度 、可用性 、 P的 精 完好 H mm red 供 6 功 耗 模式 ,1 钟 只定 位 1 a eha 提 种 分
性 、 灵活性 和 安 全性 。
次 的情 况下 功 耗 可低 至 0 mW 。 外 , 了具 有 . 3 另 除
G S用 户 端设 备 也处 于 不 断升 级 和 发展 之 传 统 的 G S 位功 能 外 , a me ed 支 持 A P P定 H m r a还 h . 中。从 接 收机 的 结 构来 看 , 着 V S( 大规 模 G S L O等 工 作模 式 , 室 内 、 随 LI 超 P,T 在 野外 等 G S P 卫 集 成 电路 ) 和DS 技 术 的发 展 , 道 序 贯式 、 P 单通 时 星 信 号极 弱 或者 无 法收 到 G S信 号 的情 况 下也 P 分 多路 复 用 式接 收机 早 巳被 采用 DS 模 块 的并 能定 位 。 P
1 4 0
维普资讯
I韩 汝水
—i , } 1 ¨1
基于单片机的GPS设计

基于单片机的GPS设计随着科技的快速发展,单片机已经成为现代电子技术中不可或缺的一部分。
为了更好地了解单片机的发展和应用,我们需要研究相关的外文文献,对于非母语读者来说,中文翻译也是必不可少的。
本文将介绍一些重要的单片机的外文文献和对应的中文翻译。
"Microcontroller Fundamentals" by John M. Hughes. This book provides a comprehensive introduction to microcontrollers, including their history, architecture, programming, and applications. It is an excellent resource for anyone who wants to learn about microcontrollers."Embedded Systems: A Perspective on MCU and SoC" by Yatin Chaudhary. This book provides an overview of embedded systems, including a detailed discussion on microcontrollers and system-on-chip (SoC) technology. It is a valuable resource for engineers and researchers in the field of embedded systems. "8051 Microcontroller: Architecture, Programming, and Applications" by K.K. Ray and M.K. Dash. This book provides a comprehensive guide to the 8051 microcontroller, including itsarchitecture, programming, and applications. It is an essential resource for students and professionals who want to learn about the 8051 microcontroller.《单片机基础》——李晓明译。
基于ARM+FPGA的GPS接收机设计
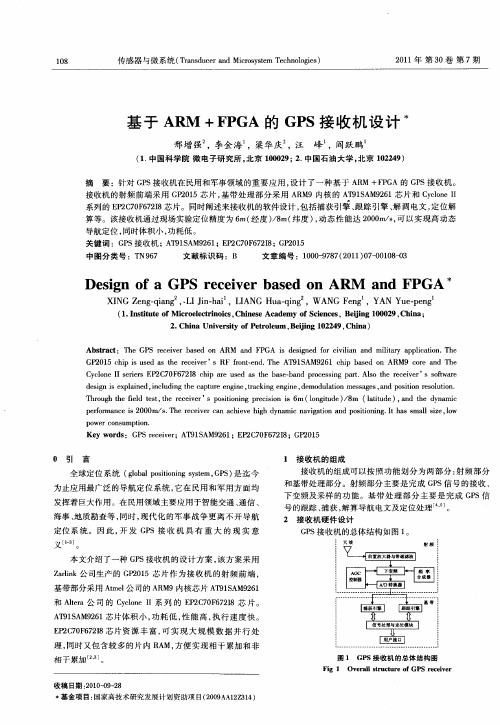
1 接 收 机 的 组成
接收机的组成可 以按 照功能划 分为两部 分 : 射频部 分 和基带处理部分 。射频部分主要 是完成 G S信号 的接 收、 P 下变频及采样 的功能 。基 带处 理部 分 主要是完 成 G S信 P
p roma c s2 0 m/ . h e ev rc n a h e e h g y a c n vg t n a d p st n n . th s s l sz ,o e r n e i 0 0 s T e r c ie a c iv ih d n mi a ia i n o i o i g I a mal ie lw f o i
d sg x li e ,n l d n e c p u e e g n ,r c ig e g n , e d lt n me s g s a d p st n r s l t n e in i e p a n d i cu i g t a tr n i e ta k n n i e d mo u a i s a e , n o i o e ou i . s h o i o
T ruht e etter e e ’ oioigpeio s6 1 gt e / m (a t e ,n h ya i hog ef l ts, e i r Sp si n rcs n i m(o i d ) 8 h id h cv tn i n u 1i d ) ad t d nmc tu e
接收机 的射频前端 采用 G 2 1 片 , 带处理部 分采用 A M P 0 5芯 基 R 9内核 的 A 9 S M 2 1芯片 和 C c n I T 1A 96 yl eI o 系列 的 E 2 7F 71 P C 0 628芯片 。同时 阐述来接收机的软件设计 , 括捕获 引擎 、 包 跟踪 引擎 、 解凋 电文 , 位解 定 算等 。该接收机通过现场实验定位精度为 6 经度 ) 8 纬度 ) 动态性 能达 2 0 m s可 以实现 高动态 m( / m( , 00 /, 导航定位 , 同时体 积小 , 功耗低 。
详解GPS定位器GPS模块方案

详解GPS定位器GPS模块方案GPS定位器是一种通过全球定位系统(GPS)来确定位置的设备。
GPS模块是其中的关键部分,它是通过收集并处理卫星信号来确定位置,并将位置信息传输到其他设备或网络上。
GPS模块通常由GPS芯片、射频模块和控制电路组成。
下面将详细介绍GPS定位器GPS模块方案的工作原理和主要组成部分。
1.GPS芯片:GPS芯片是GPS模块的核心部分,它具有接收和处理卫星信号的功能。
GPS芯片内部包含一个或多个接收机,用于接收来自卫星的GPS信号。
它还具有一些基本的处理单元,用于解码和计算接收到的信号,以确定当前位置。
2.射频模块:射频模块用于接收和发送无线信号。
在GPS模块中,射频模块主要用于接收GPS信号。
它能够接收和处理来自卫星的微弱信号,并将信号传递给GPS芯片进行进一步处理。
3.控制电路:控制电路是GPS模块的另一个重要组成部分,它用于控制整个模块的运行和通信。
控制电路通常包含一个微控制器或单片机,用于执行各种任务,如解码GPS信号、计算位置、控制射频模块和与其他设备的通信等。
GPS定位器GPS模块方案的工作原理如下:1.接收GPS信号:GPS模块中的射频模块接收从卫星发射的GPS信号,并将信号传递给GPS芯片进行处理。
接收到的信号是通过射频天线收集的。
2.解码和计算:GPS芯片解码接收到的信号,并根据信号中的时间戳和卫星位置信息计算出当前位置。
解码过程涉及对接收到的信号进行解调、解扰和解析等处理。
3.存储和传输:GPS模块将计算得到的位置信息存储在内部存储器中,并可以通过串行接口或其他通信接口将位置信息传输到其他设备或网络上。
传输方式可以是无线的,如通过蓝牙或Wi-Fi,也可以是有线的,如通过USB或RS2324.配置和控制:GPS模块可以通过控制电路来配置和控制其工作方式。
例如,可以配置GPS模块是否需要定期向服务器报告位置、更新位置频率、选择工作模式等。
GPS定位器GPS模块的方案在各个行业具有广泛应用。
基于单片机的GPS定位系统设计【范本模板】
基于单片机的GPS定位系统设计摘要GPS是全球定位系统英文名词Global Positioning System的缩写.该系统是美国布设的第二代卫星无线电导航系统。
它能为用户提供全球性、全天候、连续、实时、高精度的三维坐标、三向速度和时间信息.其目的是在全球范围内对地面和空中目标进行准确定位和监测。
现在,GPS接收机作为一种先进的导航和定位仪器,已在军事及民用领域得到广泛的应用。
本设计是基于AT89C51单片机来实现的简易GPS定位信息显示系统。
本控制系统主要完成接受数据、时间显示、经度显示、纬度显示等常规功能.此方案基于单片机、GPS模块和12864液晶显示屏等硬件,并应用C语言实现了GPS信号的提取、显示及基本的键盘控制操作等。
经过实践测试,这种接收机可以达到基本GPS信息的接收以及显示,可以做到体积小、精度高、连续导航,并可广泛应用于个人野外旅游探险、出租汽车定位及海上作业等领域。
关键词:GPS定位系统,单片机,液晶显示屏DESIGN OF GPS RECEIVER BASED ON 51 SINGLE CHIPCOMPUTERABSTRACTGPS is the abbreviation of the English term Global Positioning System global positioning system. The system is the United States laid the second generation satellite radio navigation system. It can provide users with continuous, real—time,global, round—the—clock,high precision three dimensional coordinates, three velocity and time information. Aimed at targets on the ground and in the air around the world an accurate positioning and monitoring。
微型GPS接收机的设计
Ke y wo r d s : J u p i t e r OEM b o a r d ; S P2 3 3 9 c h i p ; s e r i a l p o r t e x p a n s i o n ;1 2 8 6 4 L CD s c r e e n ; o n e - wa y l i n k e d l i s t
第2 2卷 第 5 期
V_ 01 . 2 2 NO. 5
电子设 计工 程
El e c t r o ni c De s i g n Eng i ne e r i ng
2 0 1 4年 3月
Ma F . 2 01 4
微 型 GP S接 收机 的设计
封 勇韬 , 花 兴艳 。
De s i R n o f mi c r o . G PS r e c e i v e r
F ENG Yo n g — t a o . HUA Xi n g — y a n
( 1 . B r a n c h 9 3 , T h e P e o p l e L i b e r a t i o n Ar m y U n i t 9 1 5 5 0 , Da l i a n 1 9 4 ,
( 1 . 海军 9 1 5 5 0部 队 9 3 分 队 辽 宁 大连 2 1 0 0 0 0 ;2 . 海军 9 1 5 5 0部 队 9 4 分 队 辽 宁 大连 1 1 6 0 2 3 )
摘要: 阐 述 了以 T u p i t e r OE M 板为核 心的 G P S 接 收 机 的软 硬 件 设 计 ,采 用 芯 片 S P 2 3 3 9实现 了 串 口的硬 件 扩展 ,使 用 以S T 7 9 2 0 为 核 心 控 制 芯 片的 1 2 8 " 6 4 液 晶 屏 显 示 接 收 到 的 数 据 ,在 嵌 入 式 程 序 中使 用单 向链 表 完成 数 据 的存 储 处理 ,
基于单片机的GPS接收机设计
基于单片机的GPS接收机设计作者:陈铁来源:《消费电子·理论版》2013年第08期摘要:采用单片机实现GPS接收机方案,实现了数据的接收、处理和液晶显示,给出了系统实现原理图和程序流程图,对原理做了详细说明。
关键词:GPS;16450;液晶显示中图分类号:TN85 文献标识码:A 文章编号:1674-7712 (2013) 16-0000-02全球定位系统(Global Positioning System,GPS)是美国从20世纪70年代开始研制,于1994年全面建成,以接收导航卫星信号为基础的非自主式导航与定位系统。
它以全球覆盖、全天候、连续实时提供高精度的三维位置、三维速度和时间信息的能力,很好地解决了人类导航和定位问题。
随着全球定位系统的不断改进,软硬件的不断完善,应用领域正在不断的开拓,无论在军事还是民用领域都得到广泛地应用和发展。
实际应用中,GPS接收机收到轨道卫星的信号后,经过解调输出的,是标准格式的GPS定位数据,该数据必须经过进一步处理,才能在用户数据终端上显示。
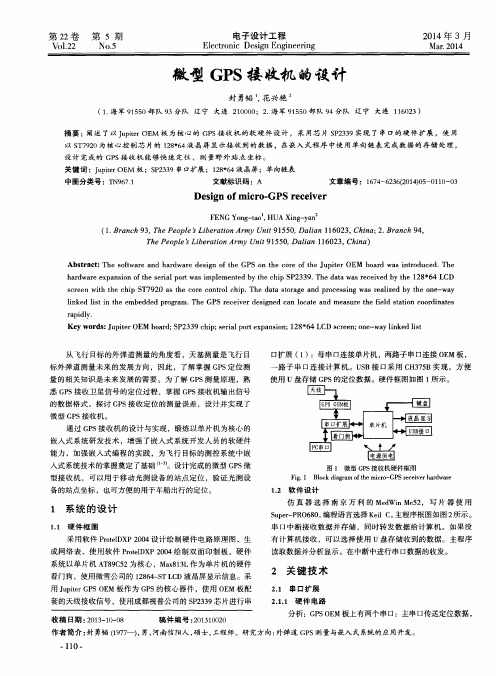
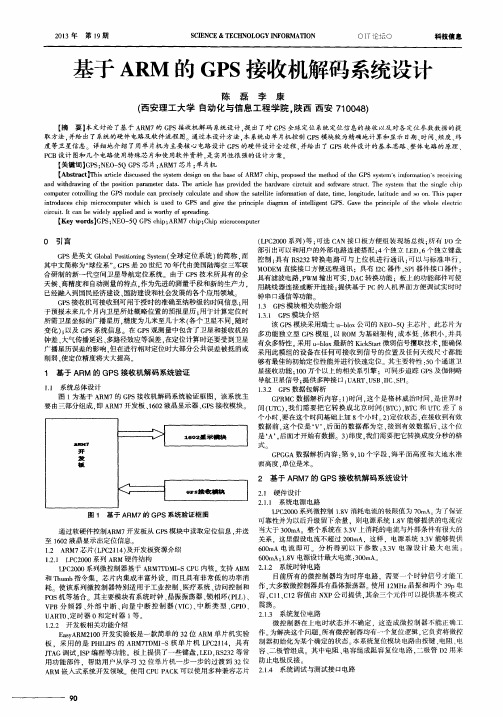
一、接收机硬件设计系统采用AT89S51单片机作微控制器,用GPS_GB10接收模块接收轨道卫星的信号,经GPS信号处理后用16450进行串并转换,通过数据总线传给CPU,再经8255发送给LCD显示,系统结构如图1所示。
(一)控制单元由于单片机芯片数据存储容量不足,用6264扩展8K外部数据存储单元来临时存储接收的GPS数据,用74LS138译码器产生GPS与液晶的片选信号,同时用74LS373对数据进行锁存,以实现单片机P0口的数据地址复用。
原理图如图2所示。
(二)GPS数据接收部分GPS模块GB10接收多颗卫星的定位信息,进行处理后按一定的格式输出串行数据,16450实现串并转换,通过总线与单片机通信。
GPS接收模块默认设置输出为:(三)液晶显示液晶显示部分采用OCMJ2*8A汉字图形液晶显示模块,用并行总线方式通过8255与单片机连接,显示速度较快。
GPSONE定位模式硬件设计方案
定位 ,限制 了G S技术 在许 多环境 的应 用 。有鉴 于 G S N 系统 会 组合 这 两种 信 息源 ,只要 有一 颗卫 P PO E
此 ,对GP 技 术 的改善 系统 应 运 而生 ,随着 芯 片制 S
星和一 个小 区站点 就可 以完成 定位 ,解 决 了传统方
造技 术 的进 步 、G S P 系统 本身 定 位精 度提 高 及成 本 案无 法解 决 的 问题 。 另外 ,G S N 系统 的基 础设 PO E
方案 。本文通 过 对G S N 模块 选 型等 内容研 究 ,设 计 了车载监 控G S NE 端 系统模 型 ,并初 步 拟 定 了 PO E PO 终
G S N 硬 件设 计 方案 ,为G S N 车裁 定位 技术 的应 用奠 定 了硬件 基础 。 PO E PO E
关键词 :G S P O E P ,G S N ;硬件设 计 ;定位
降低 ,A G S s s n G S — P( st t P) A ia 最终将取代各种传统无 施 辅 助设 备还 提供 了 比常 规 G S P 定位 高 出2 d 的灵 0B
线 定 位技术 ,成 为蜂 窝移 动通 信 系统提 供定 位服 务 敏 度 ,性 能 的 改善使 G S N 混 合 式定 位方 式 可 以 PO E
t P卫 ] P 定位 方 式 ,当终端 G S G MG S S 成 ,gG S 位信 息通 过手机 短 接 收  ̄ G S 星 信 号 时采 用 G S P + S /P R 集 O P定
消息 或手 机无 线互联 网通 信实 现移 动终 端 的组 网 ,
在室 内或 者 接受 卫 星信 号不 好 的环 境 时采 用C MA D
中图分 类号 :T 8 3 N 7
基于OPUS ONE的GPS接收机设计
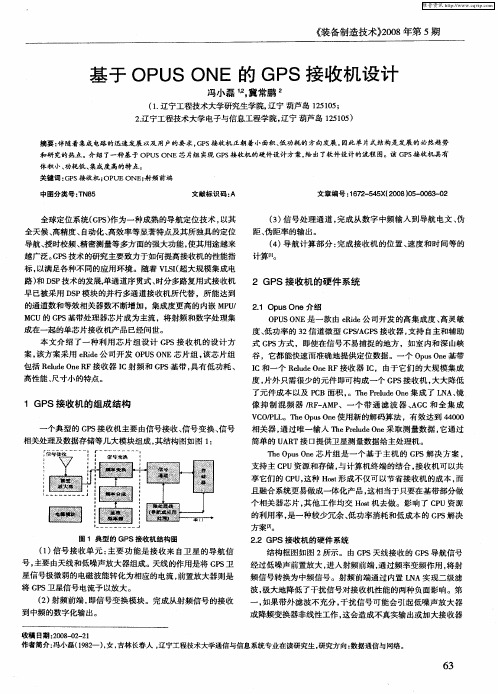
() 1 信号接 收单 元 : 要功 能是 接收 来 自卫星 的导航 信 主 号, 主要 由天线和低噪声放大器组成 。天线 的作用是 将 G S卫 P 星信号极微 弱的电磁 波能转化 为相应的电流 , 前置放大器则是 将 G S卫星信号 电流予 以放大 。 P
波, 极大地 降低 了干扰信 号对 接收机性 能的两种 负面影响 。第
维普资讯
《 装备制造技术 ̄o 8 2o 年第 5 期
基 于 OP ON 的 GP S U E S接 收 机 设 计
冯小磊 他, 常鹏 冀
(. 1 辽宁3 程技 术大学研究生学 院, 2 辽宁 葫芦 岛 15 0 ; 2 15 2辽宁3 程技术大学 电子与信息3 程学院 , 宁 葫芦岛 15 0 ) . 2 2 辽 2 1 5
摘要 : 伴随着集成电路 的迅速发展  ̄7 1 : L# 户的要 求, P 接 收机正朝 着小面积 、 Z GS 低功耗的  ̄ t4 展 , " L 因此单 片式结构是发展的 必然趋 势 e 和研究的热点。介绍 了一种基 于 O U ON P S E芯 片组 实现 G S 收机 的硬件设计 方案 , 出了软 件设计的流程 图。该 G S 收机具 有 P接 给 P接
体积小 、 功耗பைடு நூலகம்、 集成度高的特, 最。
关键词 :P G S接 收 机 ; UEONE; 频 前 端 OP 射 中 图 分 类 号 : N8 T 5 文献标识码 : A
文章编号 : 7 - 4 X 2 0 0 — 0 3 0 1 2 5 5 ( 0 8)5 0 6 - 2 6
全球定位系统( P ) 为一种成熟 的导航定位 技术 , c s作 以其
谷 ,它都能快速而准确地提供定位 数据。一个 O u n p s e基带 O I c和一个 R ld n F接收器 I e e e u O R c,由于它们 的大规模集成
单比特接收机的结构及其性能分析
单比特接收机的结构及其性能分析摘 要:单比特接收机是一种结构非常简单的数字接收机,他的整个设计可以在一个芯片中完成。
本文主要研究了单比特接收机的结构,并对其性能进行了分析。
该接收机能够覆盖约1GHz的带宽,并且可以同时处理两个信号。
他不仅具有良好的频率分辨率和灵敏度,而且单信号动态范围和双信号无杂散动态范围也比传统的数字接收机大。
关键词:单比特接收机;射频前端;FFT;IFM1引 言单比特接收机(Monobit Receiver)的概念源于商用GPS接收机的设计。
在商用GPS接收机中使用的模/数转换器ADC一般只有1~2b,而相对于GPS信号来说,一般的脉冲射频信号要简单得多,因此,采用位数较少的ADC的思想在宽带接收机设计中得到采纳,从而出现了单比特接收机这一名词。
单比特数字接收机的主要优点是结构简单,可以在一个芯片上实现整个设计。
他最多能同时处理两个输入信号,具有良好的频率分辨率(即能分辨出频率相近的两个信号)和灵敏度,而且单信号动态范围和双信号无杂散动态范围都非常大。
但这种接收机的缺点是瞬时动态范围非常低,不能同时接收一个强信号和一个弱信号。
单比特接收机具有很大的应用潜力,在不远的将来一定会取代现有的只能处理一个信号的瞬时测频(Instantaneous Frequency Measurement,IFM)接收机。
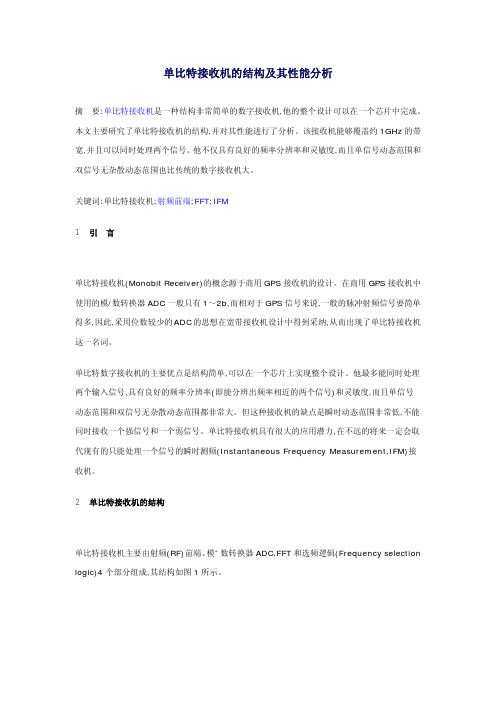
2单比特接收机的结构单比特接收机主要由射频(RF)前端、模ˆ数转换器ADC,FFT和选频逻辑(Frequency selection logic)4个部分组成,其结构如图1所示。
图1单比特接收机结构2.1射频前端单比特接收机的射频前端结构与传统的IFM接收机的相似,其组成如图2所示。
由于单比特接收机的瞬时动态范围很小,故射频前端的设计比较简单,可以使用限幅放大器代替线性放大器。
限幅放大器的特性与工作在饱和状态的放大器的特性相似,两者之间的差别在于限幅放大器的输出是恒定的,而工作在饱和状态的放大器的输出会发生变化。
基于DSP6713的导航接收机硬件平台设计和实现的开题报告
基于DSP6713的导航接收机硬件平台设计和实现的开题报告导航接收机是一种能够接收各种卫星导航系统信号并进行处理和定位的设备。
基于数字信号处理技术的导航接收机具有高精度、高可靠性、高灵敏度和多功能等优点。
本文将研究一种基于DSP6713的导航接收机硬件平台设计和实现。
在硬件设计方面,该导航接收机主要包括前端信号处理模块、中间频率处理模块和数字信号处理模块。
其中,前端信号处理模块主要包括天线、低噪声放大器、混频器和滤波器等模块,用来进行信号采集和前置处理。
中间频率处理模块主要包括中频放大器和中频滤波器等模块,用来进行信号的放大和滤波。
数字信号处理模块主要包括DSP6713芯片、FPGA和AD转换器等模块,用来进行信号的数字化、解调、解码和定位计算。
在软件设计方面,该导航接收机主要包括嵌入式实时操作系统、AD转换器驱动、数码管驱动、GPS信号解码算法、定位计算算法和用户界面等模块。
其中,嵌入式实时操作系统用来管理系统资源和调度任务,保证系统的稳定性和实时性。
AD转换器驱动用来进行信号的数字化和采样。
数码管驱动用来显示定位结果和系统状态等信息。
GPS信号解码算法用来解码接收到的导航信号,提取其中的导航数据。
定位计算算法用来利用接收到的导航数据和卫星信息进行定位计算。
用户界面用来向用户展示定位结果和系统状态等信息,并提供操作和设置等功能。
本文将通过对DSP6713芯片和GPS信号解码算法的深入研究,设计并实现一种高性能、高精度、高可靠性的导航接收机硬件平台。
该导航接收机可以用于军事、民用等领域,具有重要的应用价值。
基于ARM的GPS接收机解码系统设计
【 K e y w o r d s ] G P S ; N E O - 5 Q G P S c h i p ; A R M 7 c h i p ; C h i p m i c r o c o m p u t e r 0 引 言
G P S是英文 G 1 o b a l P o s i t i o n i n g S y s t e m( 全球 定位 系统 ) 的简称 . 而 其 中文简称为“ 球位 系” G P S是 2 O世纪 7 O年代 由美国陆海空三军联 合研制 的新一代空 间卫星导航定位系统 由于 G P S 技术所具有 的全 天候 、 高精度和 自动测量 的特点 . 作为先进的测量手段 和新 的生产力 . 已经融入到国民经济建设 、 国防建设和社会 发展 的各个应用领域。 G P S 接收机可接收到可用于授 时的准确 至纳秒级 的时 间信息 : 用 于预报未来几个月内卫 星所处概略位置的预报 星历 : 用 于计算定位时 所需卫星坐标的广播星历 , 精度为几米至几十米 ( 各个卫星不 同. 随时 ( L P C 2 0 0 0系列 ) 等; 可选 C AN接 口板方便组装 现场总线 ; 所有 I / O全 部 引出可以和用户 的外部 电路连接搭配 : 4个独立 L E D. 6个独立键盘 控制; 具有 R S 2 3 2转 换电路可与上 位机进行通 讯 : 可 以与标 准串行 . MOD E M直接接 口方便远程通讯 :具有 I 2 C器件 , S P I 器件接 口器件 ; 具有滤波电路 . P WM输出可实, DA C转换功能 :板上的功能部件可使 用跳线器连接或断开连接 : 提供基于 P c的人机 界面方便调试实时 时 钟串口 通信等功能 1 - 3 GP S 模 块相关功能介绍 1 . 3 . 1 G P S模块介绍 该G P S 模块采用瑞士 u _ b l o x公司的 N E O 一 5 Q主芯片 .此芯 片为 多功能独立型 G P S 模组, 以R O M 为基础架构 . 成本低 、 体 积小 , 并具 有众 多特性 采用 b l o x 最新的 K i c k S t a a微弱信号攫取技术 . 能确保 采用此模 组的设备在任何可接 收到信 号的位置及任何天线尺寸都 能 够 有最佳 的初始定位性能并进行快速定位 其主要抒 陛: 5 O 个通道卫 星接 收功能 : 1 0 0万个以上的相关 系引擎 :可 同步追踪 G P S及伽俐 略 导航卫星信号 : 提供多种接口: U AR T 、 U S B、 I I C、 S P I 。 1 . 3 . 2 GP S数据包解析 G P R MC数 据解 析内容 : 1 ) 时间 . 这个是格林 威治时间 , 是世 界时 间( U T C ) . 我们需要 把它转换 成北京 时间 ( B T C ) , B T C和 U T C差 了 8 个小时 . 要在这个时间基础上加 8个小时。 2 ) 定位 状态 , 在接收到有效 数据前 . 这个 位是 ‘ V’ , 后 面的数据都 为空 , 接到有效 数据后 , 这个 位 是‘ A’ , 后面才开始有数据 。3 ) 纬度 , 我们需要把它转换成度分秒的格 式。 G P G G A数据解析 内容 : 第 9 , 1 0 个字段 , 海 平面高度和大 地水准 面高度 . 单位是米
基于ARM的GPS接收机系统设计
度 ,高 度 单 位 ,大 地 水 准 面 高 度 ,高
可 靠 的 数 据 通 信 , 电路 如 图4 所 示。 显 示 电路 液 晶 显 示 是 大 多系 统 中 常 用 的 器 件 ,能 让 工 程 人 员 实 时 的 了 解 系 统 工 件情 况 及 一些 数 据 。因 为A RM器 件
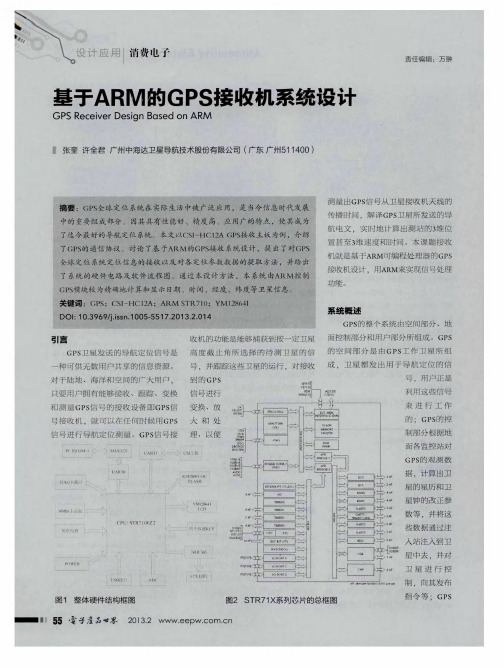
S TR 7 l x F 系 列 是 含 有 嵌 入式F l a s h  ̄R A M的A R M驱 动
Ⅵ, E , 1 8 n WE 0
的1 6 / 3 2 位 微 处 理 器 , 内部 资
源框图如图2 所示 。
D7
4 4
1 2
王 , o7
V CC
RE =
S TR7 1 X与PC机接 口电路
本设 计 用MA X3 2 2 1 进 行 电 平 转 换 , 匹配 P c 和 主板 的 电 压 ,实现 正确
它 的 作 用 是 接 收 GP S  ̄ _ 星 所 发 出 的 信 经 度 ,经 度 半 球 ,定 位 质 量 指 示 ,使
号 ,利 用 这 些 信 号 进 行 导 航 定 位 等 工 用 卫 星 数 量 , 水 平 精 确 度 ,海 拔 高
S GP GGA, < 1 > J < 2 > , < 3 > J < 4 > J < 5 > J <
因此 本次 设计 通过 G P I O口通 信 ,并
没 有 采 用 总 线 驱 动 。该 电路 模 式 完成
用 户 一 股 需 要 利 用 此 导 航 信 息 来 计 算
某一 时 ̄ I J GP S 卫 星 在 地 球 轨 道 上 的 位
是 高 速 器 件 ,而 液 晶 通 常 时 序 较 慢 .
C8051F020单片机与GPS接收板串行通信的设计
a d GPS Re ev d B a d n c ie o r
Zha g Ta n o
( e4 s s ac n ttt fCE Th 1 tRe e rh Isiu eo TC,B n b 2 3 0 ) egu 3 0 6
Abs r c I h sa t l ,d sg e ta t n t i r i e e i n d GPS r c i e o r a e n r c i e d l fLEA- H s d sg e c e ev d b a d b s d o e ev d mo u e o S wa e in d,t e d t h aa
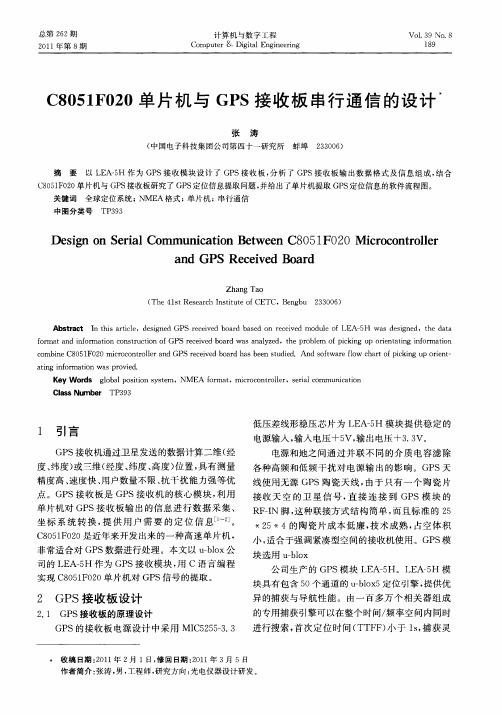
司 的 L A 5 作 为 G S接 收模 块 , C语 言 编 程 E -H P 用 实现 C 0 1 0 0单片 机对 GP 8 5F 2 S信号 的提 取 。
*5 2 *4的陶瓷 片成本低廉 , 技术成熟 , 占空体 积
小, 适合 于强 调 紧凑型 空 间的接 收机使 用 。GP S模
的专用捕获引擎可以在整个时间/ 频率空间内同时
G S的接收板电源设计 中采用 MI 55—. P C 253 3
进行搜索 , 首次定位 时间( T F 小于 1 , T F) s捕获灵
张 涛
蚌埠 230) 3 0 6 ( 国 电子 科 技 集 团公 司第 四 十一 研 究 所 中
摘
要
以 L A 5 作 为 GP E -H S接 收模块 设计 了 G S接收 板 , P 分析 了 G S接收板 输 出数 据格 式 及信 息组 成 , 合 P 结
全球定位 系统 ; NME A格式 ; 单片机 ;串行通信
块 选用 Ubo —lx 公 司生 产 的 G S模 块 L A一 H。I A 5 模 P E 5 . -H E
一种单芯片GPS接收机的硬件设计
2 H mmeh a a r ed芯 片 介绍
H mmeh a l芯 片是一 个 高集成度 的单片 G S接 收机智 能芯片(c ,片 内集成 了低 噪声放 大器( o os a redI P i) Lw N i e
A l e,L ) mpi r NA 、混频 器( x r 自动增 益控 制器 ( uoG i C nrl r GC 、模 数变 换( / 、线 性稳压器 i f Mie) 、 A t an o t l ,A ) oe A D) (ierrg l o) Ln a e ua r、锁 相环 (h s o k dL o ,P L 和数字基 带( ii l ae a d。由 于它 的超 大规模 集成度 , t P aeL c e o p L ) D gt sbn ) ab Ha meh a 片 外只需 接很 少 的元件 即可构 成一个 GP 接 收机 ,大大减 少 了元 件成本 以及 P B面积 。 m red S C Ha mme ed使用 大规模 并行关 联技术 来接 收卫 星 以八 个并 行信道发 射 的信号 , 将 它们 同 3 ,0 r a h 并 20 0多个相关 器 中的参考码 进行 比较 。与车辆导航 系统 中常用 的接收器 相 比 , 该技 术 可以大 幅缩短 首次 定位 时 间 , 可 以显著 并 减少 功耗 。Ha mmeh a 具 有结构 灵活 的 P L,巧妙 地使 用 了 目前手 机设计 中的功能单 元 ,如用 于高精 度参 考 时 re d L
Ke r s GPS r c i e ; sn l h p; RF cr u t b s b n ywo d : e ev r i g ec i ic i; a e a d; PCB
I 引 言
作为一 种成熟 的卫 星导航 系统 ,G S 术 已被应用在 各 行各业 中 。G S P技 P 接收机作 为G S 统 中的用 户 部分 , P系 直是 国内外一些 公 司和研 究机 构的研 发对象 。随着硬 件设计 水平和 芯片制造工 艺 的不 断进 步 ,以及 军用 和民用 对 小尺寸 、低 功耗 器件 的不 断追 求 ,GP 接 收机 已 由早期 的G S S P 芯片组 发展 到现在 的将G S P 射频 与数 字部 分集 成 在 一起的单 芯片G S P 接收 机 。在 提高整体 性能 的同时 ,大大缩 小 了整个 G S 收机 的尺寸 ,降低 了功耗 ,也 节约 P接
南方北极星9600型单频GPS接收机的认识
南方北极星9600型单频GPS接收机的认识实训一南方北极星9600型单频GPS接收机的认识每组仪器:南方北极星9600型单频GPS接收机一台,脚架一个,电池两块,基座一个,2米钢卷尺一把,记录板及记录表格。
(一)新特点南方北极星9600型是智能一体化的GPS 接收机,没有电缆,没有外接电池,没有天线,任何东西都已内置在一个小小的主机壳里,宽大的液晶显示屏还可以在采集数据时查看星历情况、卫星分布。
该机适合于不同层次用户,既可当傻瓜机使用,也可使用内置采集器来进行GPS 数据采集工作。
另外,采用双电源系统,可以自动切换到另一块电池中供电,从而保证不间断测量工作。
9600型GPS接收机内存高达 16M 的,能连续存储约二十天的采集数据。
(二)组成9600 型 GPS 测量系统可分为硬件、软件两个部分,具体组成如下:硬件:1. 9600 接收机(内置测量型天线及抑制多路径板)原装进口 OEM 板和 CPU;2. 9600 单片机内置采集器(内置采集软件);3. 可充电电池及充电器;4. 铝或木三脚架;5. 数据传输电缆。
软件:包括数据传输软件(计算机与 9600 主机通讯软件)、GPS 数据处理系统(包含基线向量处理、闭合差自动搜索、网平差、高程拟合以及图形输出等功能)。
为达到高精度的大地测量要求,9600 型 GPS 测量系统采用静态相对定位模式。
此时外业部分需两台或两台以上 GPS 接收机。
同时,为方便野外观测,提高野外作业的效率,建议用户在条件许可下配置更多 GPS 接收机9600 型 GPS 测量系统还可扩展成后差分测量系统。
精度可达?0.1m——?1m (精度与作用距离成反比)。
(三)测量系统的主要技术参数1、9600 接收机:?? 12 个并行的独立通道、可同时接收 12 颗卫星?? L1 载波相位、C/A 码伪距,1575.42MHz—1—?? 扁平有源天线带内装式抑径板?? 根据卫星高度及卫星运行的健康状况自动选择卫星?? flash 闪存内存 16M(与优盘同芯片组),可存储连续约 20 天数据量?? 240*160 的大液晶显示屏?? 两块高性能锂电池连续工作时间长达 16 小时之久2、静态相对定位精度:?? 静态基线:?(5mm+1ppm)?? 高程:?(10mm+2ppm)3、同步观测时间:45 分钟左右注:同步观测时间的多少与所测距离有关,当达到 20 公里以上时观测时段长度必须有两个小时以上(参见表 2-3);还与要求达到的精度有关,若要求精度高,则观测时间应长一些,精度要求较低则可相对缩短。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第5卷 第4期信息与电子工程Vo1.5,No.4 2007年8月INFORMATION AND ELECTRONIC ENGINEERING Aug.,2007文章编号:1672-2892(2007)04-0249-04一种单芯片GPS接收机的硬件设计胡 睿1,黄光明1,2(1. 华中师范大学物理学院,湖北武汉 430079;2. 湖北省教育信息化研究中心,湖北武汉 430079)摘要:为了满足使用的需要,介绍一种基于Hammerhea d芯片实现单芯片全球定位系统(GPS)接收机的硬件设计,提出了射频印刷电路板(Printed Circuit Board,PCB)设计的解决方案。
通过测试,该GPS 接收机具有功耗低、体积小、集成度高的特点。
关键词:GPS接收机;单芯片;射频电路;基带;PCB中图分类号:TN911.25文献标识码:AHardware Design of Single Chip GPS ReceiverHU Rui1,HUANG Guang-ming1,2(1. College of Physics,Huazhong Normal University,Wuhan Hubei 430079,China;2. Hubei Province Informational Education Research Center,Wuhan Hubei 430079,China)Abstract:A hardware design of single chip GPS receiver is presented which uses Infineon Technologies and Global Locate’s Hammerhead. The RF PCB design method is also discussed. The receiver can realize the function of positioning after debugging. The testing results show that the designed GPS receiver has the performances of low power consumption, small size and high integration, and is very suitable for embedded application, such as palmtop devices.Key words: GPS receiver;single chip;RF circuit;baseband;PCB1 引言作为一种成熟的卫星导航系统,GPS技术已被应用在各行各业中。
GPS接收机作为GPS系统中的用户部分,一直是国内外一些公司和研究机构的研发对象。
随着硬件设计水平和芯片制造工艺的不断进步,以及军用和民用对小尺寸、低功耗器件的不断追求,GPS接收机已由早期的GPS芯片组发展到现在的将GPS射频与数字部分集成在一起的单芯片GPS接收机。
在提高整体性能的同时,大大缩小了整个GPS接收机的尺寸,降低了功耗,也节约了成本。
本文介绍的GPS接收机设计方案采用了英飞凌科技(Infineon Technologies)公司和Global Locate公司合作开发的Hammerhead芯片,该芯片集射频与基带GPS功能于一身,具有性能高、功耗低和尺寸小等特点。
2 Hammerhead芯片介绍Hammerhead[1]芯片是一个高集成度的单片GPS接收机智能芯片(IC),片内集成了低噪声放大器(Low Noise Amplifier,LNA)、混频器(Mixer)、自动增益控制器(Auto Gain Controller,AGC)、模数变换(A/D)、线性稳压器(Linear regulator)、锁相环(Phase Locked Loop,PLL)和数字基带(Digital baseband)。
由于它的超大规模集成度,Hammerhead片外只需接很少的元件即可构成一个GPS接收机,大大减少了元件成本以及PCB面积。
Hammerhead使用大规模并行关联技术来接收卫星以八个并行信道发射的信号,并将它们同32,000多个相关器中的参考码进行比较。
与车辆导航系统中常用的接收器相比,该技术可以大幅缩短首次定位时间,并可以显著减少功耗。
Hammerhead具有结构灵活的PLL,巧妙地使用了目前手机设计中的功能单元,如用于高精度参考时钟频率(10~40MHz)和实时时钟频率(32,768kHz)的晶振,支持在第三代移动通信(3G)、数字通(Global System for收稿日期:2007-03-20;修回日期:2007-04-24250 信 息 与 电 子 工 程 第5卷 Mobile communications ,GSM)、码分多址(CDMA)和个人数字助理(Personal Digital Assistants ,PDA)电话中应用。
片上的LNA 允许连接无源的或者有源的天线到Hammerhead 。
标准的通用异步接收机(Universal Asynchronous Receiver Transmitters ,UART)端口、串行外设接口(Serial Peripheral Interface ,SPI)和I 2C(Inter-Integrated Circuit)接口,使其可以与任何一种目标系统进行连接。
Hammerhead 提供6种功耗模式,当1分钟只定位1次时功耗可低至0.3mW 。
另外,除了具有传统的GPS 定位功能外,Hammerhead 还支持辅助型全球定位系统(Assisted Global Positioning System ,A-GPS)和长期轨道技术(Long Term Orbit technology ,LTO)等工作模式,在室内和野外等GPS 卫星信号极弱或者无法收到GPS 信号的情况下,通过移动网络获取由无线网络运营商提供的位置辅助信息或者由Global Locate 服务器提供的LTO 数据,也能实现定位功能。
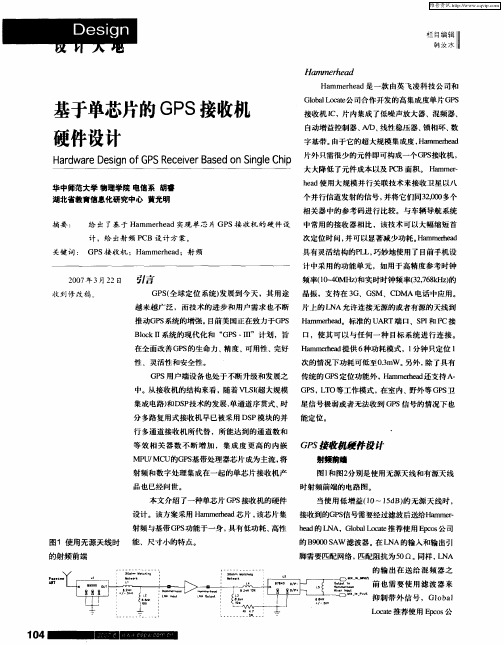
3 GPS 接收机硬件设计3.1 射频前端电路设计图1和图2分别是使用无源天线和有源天线时射频前端的电路原理框图。
Fig.1 RF front-end circuit using passive antenna图1 使用无源天线时的射频前端原理框图Fig.2 RF front-end circuit using active antenna图2 使用有源天线时的射频前端原理框图如果使用低增益(10~15dB)无源天线,接收到的GPS 信号需要经过滤波后送给Hammerhead 的LNA ,Global Locate 推荐使用Epcos 公司的B9000 SAW 滤波器。
在LNA 的输入和输出引脚需要匹配网络,匹配阻抗为50Ω[2]。
同样,LNA 的输出在送给混频器之前也需要使用滤波器来抑制带外信号,Global Locate 推荐使用Epcos 公司的B7840 SAW 滤波器,经该滤波器输出的平衡差分信号对可以直接输入给Hammerhead 的混频器差分引脚。
如果使用高增益(25~30dB)有源天线,无需使用内部LNA ,直接将接收到的GPS 信号经过B7840滤波后送给混频器即可。
由于天线需要供电,因此在天线电源处采用了LC 滤波用来滤除由电源进入的高频噪声。
天线信号经过滤波后通过一个隔直电容,防止直流偏置进入混频器。
另外要注意增加合适的衰减器,防止混频器过载。
假设混频器输入信号最高增益为18dB ,天线接收器增益为28dB ,天线的线缆衰减1.4dB/m ,长度为3m ,可以增加一个T 型电阻衰减网络,其衰减系数=28−18−3×1.4≈5dB 。
3.2 参考时钟产生电路设计Hammerhead 使用两种时钟:参考时钟(Reference Clock ,RC)和实时时钟(Real Time Clock ,RTCCLK)。
RC 的频率范围是10~40MHz ,可来自外部系统的时钟输入,也可由一个独立的时钟IC 产生。
因为该时钟要提供给芯片内部的锁相环、射频模块、数字基带以及相关器等模块,要求其时钟偏移在2.5ppm 以内,如果偏移太大,就不足以保证信号的跟踪和锁定,由此推荐使用26MHz 的温度补偿型晶体振荡器(Temperature CompensatedCrystal Oscillator ,TCXO),具体电路如图3所示。
其中,磁珠的作用是滤除电源噪声对TCXO 输出信号的影响。
Fig.3 Reference clock circuit图3 参考时钟产生电路第4期胡 睿等:一种单芯片GPS接收机的硬件设计251RTCCLK用于低功耗模式下将Hammerhead唤醒。
该时钟频率大小要求为32.768kHz,可以用普通的有源晶振或者片外系统时钟源产生。
3.3 电源部分设计Hammerhead共需要VDD_RF(1.8V),VDD_LNA(1.8V),VDD_PLL(1.5V),VDD_CORE(1.5V),VDD_LP(1.5V)和VDD_IO(1.8/2.5/2.8/3.3V)6路电源,其中VDD_RF,VDD_LP,VDD_PLL和VDD_CORE在芯片内部均有对应的线性稳压器,可简化电源设计。
VDD_IO决定Hammerhead的数字IO管脚的电平电压。
在设计电源电路时,可根据整个系统的电源使用情况、功耗要求以及Hammerhead的功率耗散,考虑是否使用内部线性稳压源以及使用多大的逻辑电平。
另外要注意:a) 每个电源输入引脚必须至少有一个0.1µF陶瓷滤波电容;b) VDD_CORE是Hammerhead的核心电压,工作时需要较大的瞬态电流,在该电源网络上添加一个10µF的电容到地,以提供更好的电源响应;c) 注意区分模拟和数字电源,用磁珠对模拟和数字电源进行隔离。
尤其是RF部分的电源,对电源噪声极其敏感,必要的情况下,可以单独使用一个输出1.8V的LDO给RF供电。
3.4 数字I/O接口设计Hammerhead拥有三种串行接口:标准UART端口、I2C端口以及SPI端口。
其中,I2C和SPI端口的引脚与UART 引脚复用,可以通过设置Hammerhead的操作模式选择(Operational Mode Select,OMS)[2:0]三个引脚的逻辑电平状态,来选择使用哪一种接口。
3.5 PCB设计由于含有射频信号,GPS接收机的PCB板设计相对中低频信号要困难得多,因此需要注意:a) 射频信号走线尽量短、直,在同一层走线,不能走直角;尽可能地用铺地铜皮将射频信号隔离,防止其他信号与其之间产生串扰;平衡差分信号的路径要保持平行,并且长度相仿,这样可以加强二者之间的耦合而减弱与其他线之间的耦合[3]。