ODE模拟双足机器人快速行走
双足仿生机器人行走机构设计

双足仿生机器人行走机构设计
双足仿生机器人行走机构设计一般包括以下几个关键部分:
1. 足底结构:足底结构是机器人与地面接触的部分,需要具备良好的稳定性和抓地力。
一般采用橡胶材料制作,设计有凹凸纹路或者类似动物脚掌的结构,以增加摩擦力和抓地力。
2. 关节设计:双足仿生机器人的每个腿部都需要多个关节来实现自由运动。
关节设计需要考虑到机器人的稳定性和灵活性,一般采用电机驱动的旋转关节或者液压/气动驱动的线性关节。
3. 动力系统:机器人行走需要动力系统提供能量。
一般采用电池或者电源供电,驱动关节的电机需要具备足够的扭矩和速度来实现机器人的行走。
4. 传感器:为了实现机器人的平衡和姿态控制,需要配备各种传感器。
例如,陀螺仪和加速度计可以用来检测机器人的倾斜角度,力传感器可以用来感知地面反作用力,视觉传感器可以用来感知周围环境。
5. 控制系统:双足仿生机器人的行走需要一个高效的控制系统。
控制系统可以根据传感器的反馈信息,实时调整关节的运动,以保持机器人的平衡和稳定。
总体来说,双足仿生机器人行走机构设计需要考虑到稳定性、灵活性、能量效率和控制系统的要求。
具体的设计方案需要根据机器人的应用场景和需求来确定。
双足机器人步行仿真与实验研究

1.2 课题研究的背景和意义
机器人一词最早出现于 1920 年捷克作家 Karel Capek 的剧本 《罗萨姆的万能机器人》 中,在该剧中,机器人“Robota”这个词的本意是指苦力,是剧作家笔下的一个具有人的 外表、特征和功能的机器,是一种人造的劳动力[1]。随着现代科技的发展,机器人技术 已经广泛应用于人类生活领域,研制具有人类外观特征、可模拟人类行走和其他动作的 仿人机器人一直是人类的梦想之一。 机器人是一门综合性很强的科学,有着极其广泛的研究和应用领域。机器人技术是
学位论文作者签名:史耀强
日期:2008 年 3 月 6 日
第 I 页
上海交通大学硕士学位论文
上海交通大学 学位论文版权使用授权书
本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意 学校保留并向国家有关部பைடு நூலகம்或机构送交论文的复印件和电子版,允许论文 被查阅和借阅。本人授权上海交通大学可以将本学位论文的全部或部分内 容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存 和汇编本学位论文。 保密□,在__年解密后适用本授权书。 本学文论文属于 不保密√ (请在以上方框内打“√” )
第 I 页
上海交通大学硕士学位论文
摘 要
对试验结果进行分析并给出了系统存在的不足和改进意见。
关键词:双足机器人,步态规划,动力学,虚拟样机,联合仿真
第 II 页
上海交通大学硕士学位论文
ABSTRACT
Walking Simulation and Experimental Study of Biped Robot
第 IV 页
上海交通大学硕士学位论文
上海交通大学 学位论文原创性声明
本人郑重声明:所呈交的学位论文,是本人在导师的指导下,独立进 行研究工作所取得的成果。除文中已经注明引用的内容外,本论文不包含 任何其他个人或集体已经发表或撰写过的作品成果。对本文的研究做出重 要贡献的个人和集体,均已在文中以明确方式表明。本人完全意识到本声 明的法律结果由本人承担。
3D双足机器人的动态步行及其控制方法

轨迹生成
基于步态规划结果,将步态序列转 化为关节角度、速度等控制信号, 生成机器人行走的轨迹。
轨迹跟踪与控制
通过反馈控制算法,实时调整机器 人各关节的运动轨迹,实现精确的 轨迹跟踪与控制。
03 3D双足机器人动态步行 的控制方法
基于模型的控制方法
建立动态模型Βιβλιοθήκη 利用机械动力学、运动学等理论,建立3D双足机器人的动态模型 ,包括身体各部分的运动方程、力和运动的关系等。
02
通过对机器人动力学和运动学 特性的深入研究,实现了对机 器人步行的精确控制。
03
引入了先进的控制算法和优化 策略,提高了机器人的稳定性 和适应性。
研究不足与展望
当前的研究仍存在一些不足之处,例如机器人在复杂地形和环境中的适应能力还有 待提高。
对机器人步行的动力学和运动学特性的理解还不够深入,需要进一步的研究和探索 。
控制器设计
基于动态模型,设计合适的控制器,通过调节机器人的姿态、步长 、步频等参数,实现稳定的动态步行。
参数调整
根据实际需要,对控制器参数进行调整,以达到最优的步行性能。
基于学习的控制方法
样本数据采集
通过实际实验或模拟,采集3D双足机器人在不同环境、任务下的 样本数据,包括姿态、速度、加速度等。
深度学习算法
步行周期与相位
步行周期
步行周期是指机器人完成一个完整步态循环所需的时间,通常由支撑相(单足支撑)和摆动相(双足支撑)组成 。
相位控制
相位控制是指控制机器人各关节在行走过程中的运动时序和幅度,实现稳定行走和姿态调整。
步态规划与轨迹生成
步态规划
根据机器人动力学模型和运动 学约束,设计稳定、高效的步 态序列,包括步长、步高、步
双足舞蹈机器人
双足舞蹈机器人在科技飞速发展的今天,机器人已经不再是遥不可及的科幻梦想,而是逐渐走进了我们的现实生活。
其中,双足舞蹈机器人以其独特的魅力和令人惊叹的表现,成为了机器人领域的一颗璀璨明星。
双足舞蹈机器人,顾名思义,是能够像人类一样用双脚站立和行走,并能够完成各种舞蹈动作的机器人。
它们的出现并非一蹴而就,而是经过了无数科学家和工程师们的不懈努力和创新。
要实现双足舞蹈,机器人首先需要具备稳定的站立和平衡能力。
这就要求其身体结构和控制系统的设计达到极高的精度和复杂度。
双足机器人的腿部关节通常由多个电机和传感器组成,通过复杂的算法和程序来控制关节的运动,从而实现稳定的站立和行走。
在舞蹈动作的实现方面,编程是关键。
工程师们需要将各种舞蹈动作分解成一系列的指令和参数,输入到机器人的控制系统中。
这不仅需要对舞蹈艺术有一定的理解,还需要精通机器人的控制原理和编程技术。
而且,为了让舞蹈动作更加流畅自然,机器人的动作响应速度和精度也必须达到很高的水平。
双足舞蹈机器人的外观设计也不容忽视。
它们往往具有类似于人类的身体比例和外形,以更好地展现舞蹈的美感。
同时,为了适应不同的舞蹈风格和表演场景,机器人的外观还可以进行定制和装饰。
这些机器人在实际应用中具有广泛的前景。
在娱乐领域,它们可以成为舞台上的明星,为观众带来精彩绝伦的舞蹈表演。
其独特的形象和精湛的技艺能够吸引众多观众的目光,为娱乐产业注入新的活力。
在教育领域,双足舞蹈机器人可以作为一种创新的教学工具,帮助学生更好地理解科学、技术、工程和数学等学科的知识。
通过对机器人的研究和操作,学生能够提高自己的动手能力和创新思维。
此外,双足舞蹈机器人还可以用于医疗康复领域。
对于那些需要进行肢体康复训练的患者来说,与机器人一起跳舞可以增加训练的趣味性和积极性,提高康复效果。
然而,双足舞蹈机器人的发展也面临着一些挑战。
首先是成本问题,由于其复杂的设计和制造工艺,导致成本较高,限制了其大规模的应用。
双足步行机器人快速步行与仿真_英文_

Introduction1
Research on humanoid robots and biped locomotion is an active field in robotics. In recent two decades, many famous robots at abroad, such as Honda Robot ASIMO[1], P6[2], HRP-2[3-5], HUBO[6,7], have already demonstrated very reliable dynamic biped walking. Research on humanoid robots in China also has made progress, especially in Beijing Institute of Technology[8], Harbin Institute of Technology[9], National University of Defense Technology, and Tsinghua University. For the biped robot or humanoid robot, walking pattern generation plays a key role to ensure that the Zero Moment Point (ZMP)[10] is inside the supporting area all the times. Many researches dedicated to the biped walking pattern generation can be classified into two categories. The first uses precise knowledge of dynamic parameters of a robot[11] and the second uses limited knowledge of dynamics[3-5,12-14]. More and more researchers adopt offline walking pattern planning with online feedback control and pattern modification to improve biped
双足仿生机器人行走机构设计
双足仿生机器人行走机构设计1. 引言双足仿生机器人是一种模仿人类步行方式的机器人,其行走机构的设计是实现机器人自主行走的关键。
本文将介绍双足仿生机器人行走机构的设计原理、结构与控制方法。
2. 设计原理双足仿生机器人的行走机构设计基于人类步行的原理。
人类步行是一种交替进行的两足动作,每步分为摆动相和支撑相。
在摆动相中,一只脚离地,并向前摆动;在支撑相中,另一只脚着地支撑身体。
机器人的行走机构需要模拟这一过程,通过控制各关节的运动实现机器人的步行。
3. 结构设计双足仿生机器人的行走机构包括传感模块、控制模块和执行模块。
传感模块用于感知机器人身体姿态和环境信息,如倾斜角、步长和地面状态等。
控制模块根据传感器信号和预设的步态参数计算关节的运动轨迹和力矩控制信号。
执行模块根据控制模块的指令,控制各关节运动,实现机器人的步行。
具体的结构设计包括:3.1 关节设计双足仿生机器人的关节设计需要考虑力矩传输、运动范围和结构强度等因素。
一般采用电机驱动的关节设计,通过控制电机的转动角度和力矩,实现机器人的步行动作。
3.2 脚底设计机器人的脚底设计需要考虑地面的摩擦力、稳定性和抗震性等因素。
一般采用具有摩擦力的材料作为脚底,例如橡胶或塑料材料。
同时,在脚底设计中还可以添加传感器,用于感知地面的状态和表面特征。
3.3 稳定性设计双足仿生机器人的稳定性设计是保证机器人能够在不倒地的情况下行走。
稳定性设计包括重心的控制、姿态的调节和动态平衡控制等。
通过控制机器人的关节运动和重心转移,使机器人能够保持平衡并行走。
4. 控制方法双足仿生机器人的行走机构控制方法包括开环控制和闭环控制两种。
4.1 开环控制开环控制是指根据预设的步态参数,通过控制各关节的运动轨迹和力矩,实现机器人的步行。
开环控制简单但稳定性较差,容易受到外界干扰影响。
4.2 闭环控制闭环控制是根据传感器信号和控制模块的反馈信息,实时调整关节的运动轨迹和力矩,以实现更加稳定的步行。
双足机器人步行原理

双足机器人步行原理双足机器人是一种模仿人类步行方式的机器人,它具有独立行走、跳跃、攀爬等能力,是目前机器人领域的研究热点之一。
双足机器人的步行原理是基于人类步行的生物力学原理和工程学原理,通过合理的控制算法和机械结构设计,实现机器人的稳定步行。
首先,双足机器人步行的生物力学原理是模仿人类步行的步态。
人类步行是通过两只脚交替迈出步伐来实现的,每一只脚在着地时,身体重心会向前倾斜,然后通过脚踝、膝盖和髋关节的协调运动来保持平衡。
双足机器人也是通过类似的步态来实现步行,它需要具备类似的关节结构和运动方式,以保持稳定的步行姿态。
其次,双足机器人步行的工程学原理是基于动力学和控制理论。
在双足机器人的设计中,需要考虑到机械结构的稳定性和灵活性,以及动力系统的动态响应和能量消耗。
双足机器人的控制算法需要能够实时感知环境,做出快速的决策,并通过精准的运动控制来保持稳定的步行。
同时,双足机器人还需要考虑到地面的摩擦力、斜坡、障碍物等外部因素对步行的影响,以实现在各种复杂环境下的稳定步行。
另外,双足机器人步行还涉及到平衡控制和姿态调整。
在步行过程中,双足机器人需要不断地调整身体的重心,以保持稳定的姿态。
这需要通过传感器实时监测机器人的姿态和环境信息,然后通过控制算法来实现身体的平衡和姿态调整。
双足机器人的步行原理就是通过这样的平衡控制和姿态调整来实现稳定的步行。
总的来说,双足机器人步行的原理是基于生物力学和工程学的原理,通过合理的机械结构设计和控制算法实现稳定的步行。
未来随着人工智能、机器学习等技术的发展,双足机器人的步行能力将会更加强大,能够应对更加复杂的环境和任务,为人类生活和工作带来更多的便利和帮助。
双足仿生机器人行走机构设计

双足仿生机器人行走机构设计双足仿生机器人行走机构的设计需要综合考虑机械结构、控制系统和传感器等多个方面。
下面是一个较为常见的双足仿生机器人行走机构设计的概述:1. 机械结构:双足仿生机器人的机械结构通常由两个对称的机械腿组成,每个机械腿由多个关节连接而成。
关节可以采用电机驱动,例如直线电机或旋转电机。
关节的设计需要考虑到机器人的运动范围、力矩需求以及稳定性等因素。
2. 步态规划:双足仿生机器人的步态规划是指确定机器人腿部关节的运动轨迹和步伐。
一种常见的步态是通过将机器人的步伐分为支撑相和摆动相来实现。
在支撑相,机器人的一只腿着地支撑身体重量;在摆动相,机器人的另一只腿离地向前摆动。
步态规划需要考虑到机器人的稳定性、能耗和速度等因素。
3. 动力学模型:为了实现双足仿生机器人的稳定行走,需要建立机器人的动力学模型。
动力学模型可以通过运动学和力学方程来描述机器人的运动和受力情况。
这些模型可以用于控制系统设计和运动规划。
4. 控制系统:双足仿生机器人的控制系统需要实时监测机器人的姿态、关节角度和力矩等信息,并根据预定的步态规划来控制机器人的运动。
控制系统通常包括传感器、控制算法和执行器。
传感器可以包括惯性测量单元(IMU)、压力传感器和视觉传感器等,用于获取机器人的状态信息。
控制算法可以根据传感器数据实时计算出控制指令,例如关节角度和力矩。
执行器则将控制指令转化为机械运动。
5. 传感器:双足仿生机器人的传感器可以用于感知环境和监测机器人状态。
例如,视觉传感器可以用于识别障碍物和地面形状,压力传感器可以用于检测脚底的接触力,IMU可以用于测量机器人的加速度和角速度等。
这些传感器可以提供给控制系统有关机器人周围环境和自身状态的信息,以便实现更精确的控制和导航。
以上是双足仿生机器人行走机构设计的一般概述,具体的设计还需要根据具体应用需求和机器人的尺寸、负载和预期性能等因素进行进一步详细设计和优化。
仿人形机器人双足动态步行研究

仿人机器人两足动态行走研究1.本文概述随着技术的飞速发展,仿人机器人已成为机器人领域的一个重要研究方向。
两足动态行走作为仿人机器人的核心技术之一,不仅影响机器人的稳定性和灵活性,还直接影响其在复杂环境中的适应性。
本文旨在深入探讨仿人机器人的两足动态行走技术,分析现有技术的优缺点,提出一种新的两足动态步行控制策略。
本文将从步态生成、平衡控制、能量优化等方面对目前仿人机器人两足动态行走的研究成果进行详细回顾和总结。
本文将分析现有技术在实际应用中面临的问题和挑战,如对复杂地形的适应性、行走稳定性、能量效率等。
针对这些问题,本文将提出一种基于生物力学原理和先进控制算法的两足动物动态行走控制策略。
该策略旨在提高仿人机器人在不同环境中的行走稳定性和适应性,同时优化能耗。
该研究不仅有助于仿人机器人两足动态行走技术的发展,也为机器人在复杂环境中的应用提供了新的思路和方法。
通过本研究,有望为仿人机器人的发展做出贡献,并为相关研究和实际应用提供参考。
2.仿人机器人两足动态行走的理论基础仿人机器人两足动态行走研究是机器人领域的一个重要分支,涉及机械工程、电子工程、控制理论、计算机科学和生物力学等多个学科的交叉与融合。
本节将详细介绍两足动态行走的理论基础,为后续研究奠定坚实的理论基础。
两足行走的生物力学原理是研究人类行走模式的基础,对仿人机器人行走系统的设计具有重要的指导意义。
人类行走的生物力学特征包括行走周期、步态分析、关节运动学、肌肉动力学等。
通过深入研究这些原理,我们可以更好地理解人类行走的复杂性,并将其应用于机器人设计。
在两足行走过程中,保持动态平衡和稳定性对人形机器人至关重要。
动态平衡涉及机器人在运动过程中对外部干扰的响应能力,而稳定性控制确保机器人在各种行走条件下保持平衡状态。
这需要综合考虑机器人的质量分布、关节刚度和地面条件等因素,并通过先进的控制算法实现。
步态规划是指为机器人设计合适的行走模式,使其高效稳定地行走。
人形双足机器人运动算法
人形双足机器人运动算法人形双足机器人是一种模拟人类行走方式的机器人,它具有两只双足,可以通过运动算法实现自主行走。
本文将介绍人形双足机器人的运动算法原理及其应用。
一、人形双足机器人的运动算法原理人形双足机器人的运动算法是基于人类行走的生物力学原理和机器学习技术的结合。
它通过传感器获取环境信息,利用运动控制算法实现自主行走。
1. 步态生成算法步态是指人形双足机器人行走过程中的姿态和动作序列。
步态生成算法是通过模拟人类行走过程中的关节角度变化和身体重心的移动来生成机器人的步态。
常见的步态生成算法包括倒立摆步态和ZMP 控制算法。
倒立摆步态是一种基于动力学原理的步态生成算法,它通过控制机器人关节的角度和身体的倾斜,使机器人保持平衡。
倒立摆步态算法可以实现机器人的稳定行走,但对于不同地形和运动速度的适应性较差。
ZMP控制算法是一种基于力学原理的步态生成算法,它通过控制机器人身体的重心位置来保持平衡。
ZMP控制算法可以实现机器人在不同地形和运动速度下的稳定行走,并具有较好的适应性。
2. 动作规划算法动作规划算法是指根据机器人的运动需求和环境信息,生成机器人的运动轨迹和动作序列。
动作规划算法可以根据机器人的目标位置和障碍物位置,生成机器人的移动路径和避障动作。
常见的动作规划算法包括A*算法、D*算法和RRT算法。
A*算法是一种基于图搜索的动作规划算法,它通过计算机器人到目标位置的最短路径来生成机器人的运动轨迹。
D*算法是一种基于动态路径规划的算法,它可以在机器人运动过程中实时更新路径规划信息。
RRT算法是一种基于随机采样的动作规划算法,它通过随机采样和树搜索来生成机器人的运动路径。
二、人形双足机器人的应用人形双足机器人的运动算法在机器人领域有着广泛的应用。
下面将介绍几个典型的应用场景。
1. 服务机器人人形双足机器人可以应用于服务机器人领域,如导览机器人、接待机器人等。
通过运动算法,机器人可以实现自主行走,为用户提供导航、讲解等服务。
双足机器人步态仿真及腿部设计与控制

越障行走的适应性研究
障碍物识别的准确性
研究基于计算机视觉或传感器技术的障碍物识别方法,以提高 双足机器人越障行走的准确性。
腿部机构的灵活性
针对越障行走过程中,研究双足机器人腿部机构的灵活性设计, 以实现平稳、安全的越障动作。
自适应控制策略
根据障碍物的类型、大小和形状等因素,研究双足机器人的自适 应控制策略,以实现更高效、稳定的越障行走。
,延长机器人的工作时间。
稳定性和灵活性
03
腿部设计应同时保证机器人的稳定性和灵活性,以实现平稳、
灵活的运动。
常用腿部设计方案
01
两段式腿
两段式腿是一种常见的双足机器人腿部设计方案,由大腿和小腿组成
,通过关节连接。这种设计具有结构简单、易于控制等优点。
02 03
三段式腿
三段式腿是一种更为复杂的双足机器人腿部设计方案,由大腿、膝盖 和小腿组成,通过两个关节连接。这种设计具有更大的灵活性,能够 适应更复杂的地形和运动需求。
实验环境
实验平台设在一个模拟各种地形和环境的实验室环境中 ,以便对机器人的适应性和性能进行全面测试。
实验结果展示及分析
步态仿真
通过在实验平台上模拟不同种 类的步态,如步行、奔跑和跳 跃,研究人员可以观察到双足 机器人在不同运动状态下的性
能表现。
腿部设计与控制
通过调整机器人的腿部结构和 控制策略,研究人员观察到机 器人在不同地形和环境中的适
01
双足机器人步态仿真是通过计 算机模拟双足机器人的行走过 程,以评估机器人的稳定性、 效率和安全性。
02
步态仿真基于生物学原理,将 机器人的腿部机构简化为生物 体的腿部结构,并模拟其运动 过程。
03
双足机器人的行走控制与仿真
双足机器人的行走控制与仿真双足机器人是一种复杂的人造机器人,它可以模拟人类的步态进行行走。
在当今科技的发展中,双足机器人的应用越来越广泛,例如在残疾人康复、足球比赛和军事领域等方面都起着重要的作用。
为了实现双足机器人的高效和安全行走,需要进行行走控制和仿真的研究。
一、双足机器人的行走控制在双足机器人的行走控制中,主要有以下几个方面的技术:1. 步态规划步态规划是指为双足机器人规划一套合理的步态方式,让机器人可以稳定地进行行走。
在步态规划中,需要考虑足端和身体的着地位置、步态周期、步幅和步速等因素。
通过这些规划,可以使双足机器人实现更加灵活、平稳的步态。
2. 动力学控制动力学控制是指控制机器人进行行走时,根据机器人当前的状态、环境变化和任务需求,及时调整机器人的姿态,实现稳定的步态。
在动力学控制中,需要考虑机器人的平衡性、稳定性和动态性。
3. 路径跟踪控制路径跟踪控制是指通过计算机控制双足机器人的步伐,由计算机控制机器人按照预设的路径进行行走。
这种控制方法可以更加稳定地控制机器人步态,减少机器人的倒地风险。
二、双足机器人的仿真双足机器人的仿真是指通过计算机模拟实际的机器人操作和环境,以验证双足机器人的行走控制算法和策略。
通过仿真,可以更加准确地评估双足机器人的性能,从而为实际应用提供优秀的参考。
1. 建立仿真模型建立双足机器人的仿真模型是仿真的首要步骤。
在建立仿真模型时,需要考虑双足机器人的几何结构、质量、动力学特性等因素。
通过数学建模和仿真建模软件,可以构建出一个符合实际情况的双足机器人模型,以便进一步进行仿真分析和测试。
2. 仿真分析仿真分析是通过模拟实际情况,测试控制算法和策略的有效性。
在仿真分析中,可以模拟不同的运动状态、环境因素和操作要求,验证不同的控制方案和策略。
仿真分析可以大幅度缩短实际测试时间和成本,并可以重复测试以进行验证。
3. 仿真优化双足机器人的仿真优化是指通过仿真结果分析,改进双足机器人的行走控制算法和策略,提高双足机器人的稳定性、灵活性和交互性。
拟人双足机器人步态研究
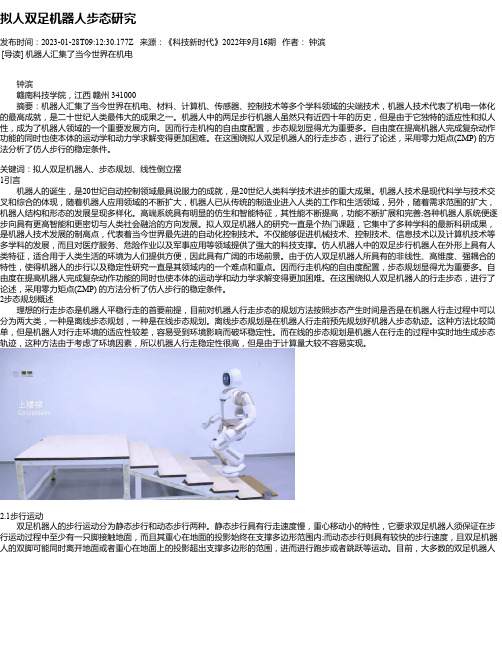
拟人双足机器人步态研究发布时间:2023-01-28T09:12:30.177Z 来源:《科技新时代》2022年9月16期作者:钟滨[导读] 机器人汇集了当今世界在机电钟滨赣南科技学院,江西赣州 341000摘要:机器人汇集了当今世界在机电、材料、计算机、传感器、控制技术等多个学科领域的尖端技术,机器人技术代表了机电一体化的最高成就,是二十世纪人类最伟大的成果之一。
机器人中的两足步行机器人虽然只有近四十年的历史,但是由于它独特的适应性和拟人性,成为了机器人领域的一个重要发展方向。
因而行走机构的自由度配置,步态规划显得尤为重要多。
自由度在提高机器人完成复杂动作功能的同时也使本体的运动学和动力学求解变得更加困难。
在这围绕拟人双足机器人的行走步态,进行了论述,采用零力矩点(ZMP) 的方法分析了仿人步行的稳定条件。
关键词:拟人双足机器人、步态规划、线性倒立摆1引言机器人的诞生,是20世纪自动控制领域最具说服力的成就,是20世纪人类科学技术进步的重大成果。
机器人技术是现代科学与技术交叉和综合的体现,随着机器人应用领域的不断扩大,机器人已从传统的制造业进入人类的工作和生活领域,另外,随着需求范围的扩大,机器人结构和形态的发展呈现多样化。
高端系统具有明显的仿生和智能特征,其性能不断提高,功能不断扩展和完善;各种机器人系统便逐步向具有更高智能和更密切与人类社会融洽的方向发展。
拟人双足机器人的研究一直是个热门课题,它集中了多种学科的最新科研成果,是机器人技术发展的制高点,代表着当今世界最先进的自动化控制技术。
不仅能够促进机械技术、控制技术、信息技术以及计算机技术等多学科的发展,而且对医疗服务、危险作业以及军事应用等领域提供了强大的科技支撑。
仿人机器人中的双足步行机器人在外形上具有人类特征,适合用于人类生活的环境为人们提供方便,因此具有广阔的市场前景。
由于仿人双足机器人所具有的非线性、高维度、强耦合的特性,使得机器人的步行以及稳定性研究一直是其领域内的一个难点和重点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
foot[i].geom=dCreateBox(space,foot[i].x,foot[i].y,foot[i].z);
dGeomSetBody(foot[i].geom,foot[i].body);
dBodySetPosition(leg[i][j].body,leg_x[i][j],leg_y[i][j],leg_z[i][j]);
leg[i][j].geom=dCreateCapsule(space,leg[i][j].r,leg[i][j].l);
dGeomSetBody(leg[i][j].geom,leg[i][j].body);
arm[i][j].geom=dCreateCapsule(space,arm[i][j].r,arm[i][j].l);
dGeomSetBody(arm[i][j].geom,arm[i][j].body);
}
for(int i=0;i<2;i++)
for(int j=0;j<2;j++)
dReal head_x=0,head_y=0,head_z=0.51;
dReal torso_x=0,torso_y=0,torso_z=0.365;
dReal hip_x[2]={0,0},hip_y[2]={-0.04,0.04},hip_z[2]={0.27,0.27};
dReal ankle_x[2]={0,0},ankle_y[2]={-0.04,0.04},ankle_z[2]={0.03,0.03};
dReal leg_joint_x[2][3]={0,0,0,0,0,0},leg_joint_y[2][3]={-0.04,-0.04,-0.04,0.04,0.04,0.04},leg_joint_z[2][3]={0.27,0.15,0.03,0.27,0.15,0.03};
dReal hip_joint_x[2]={0,0},hip_joint_y[2]={-0.04,0.04},hip_joint_z[2]={0.27,0.27};
#include <stdio.h>
#include <stdlib.h>
#include<ode/ode.h>
#include<drawstuff/drawstuff.h>
#define stp 10
dWorldID world;
dSpaceID space=dHashSpaceCreate(0);
{{0,0,0,0},{0,0,0,0}}
};
static long int TIME=0;
static float xyz[3]={0.7,0,0.3};
static float hpr[3]={180,0.0,0.0};
static float steps[10][2][5],temp_step[2][5];
dReal leg_x[2][2]={{0,0},{0,0}},leg_y[2][2]={{-0.04,-0.04},{0.04,0.04}},leg_z[2][2]={{0.21,0.09},{0.21,0.09}};
dReal foot_x[2]={0.02,0.02},foot_y[2]={-0.04,0.04},foot_z[2]={0.015,0.015};
}
for(int i=0;i<2;i++)
{
foot[i].body=dBodyCreate(world);
dMassSetZero(&mass);
dMassSetBoxTotal(&mass,foot[i].m,foot[i].x,foot[i].y,foot[i].z);
dBodySetMass(foot[i].body,&mass);
dReal foot_joint_x[2]={0,0},foot_joint_y[2]={-0.04,0.04},foot_joint_z[2]={0.03,0.03};
typedef struct {
dBodyID body;
dGeomID geom;
dJointID joint;
{{-0.02,ym,z0,0},{-0.02,ym,z1+0.02,0}},//2
{{-fs/2,0,z1,0},{fs/2,0,z1,0}},
{{-fs+fl*(1-cos(footc)),-(ym-k),z0+fl*sin(footc),1},{-0.02,-(ym-k),z0,0}},
dMassSetZero(&mass);
dMassSetCapsuleTotal(&mass,arm[i][j].m,3,arm[i][j].r,arm[i][j].l);
dBodySetMass(arm[i][j].body,&mass);
dBodySetPosition(arm[i][j].body,arm_x[i][j],arm_y[i][j],arm_z[i][j]);
torso.body=dBodyCreate(world);
dMassSetZero(&mass);
dMassSetBoxTotal(&mass,torso.m,torso.x,torso.y,torso.z);
dBodySetMass(torso.body,&mass);
dBodySetPosition(torso.body,torso_x,torso_y,torso_z);
dReal m,r,l,x,y,z;
} MyLink;
MyLink leg[2][2],arm[2][2],torso,head,foot[2],ankle[2],hip[2];
void makeRobot()
{
head.m=0.5;head.r=0.05;
torso.m=1,torso.x=0.06,torso.y=0.12,torso.z=0.19;
hip[1]=hip[0];
dMass mass;
//**************make body*****************//
head.body=dBodyCreate(world);
dMassSetZero(&mass);
dMassSetSphereTotal(&mass,head.m,head.r);
foot[0].m=0.02,foot[0].x=0.1,foot[0].y=0.06,foot[0].z=0.03;
foot[1]=foot[0];
ankle[0].r=0.02,ankle[0].m=0.001;
ankle[1]=ankle[0];
hip[0].r=0.02,hip[0].m=0.001;
dReal head_joint[3]={0,0,0.46};
dReal arm_joint_x[2][2]={0,0,0,0},arm_joint_y[2][2]={-0.08,-0.08,0.08,0.08},arm_joint_z[2][2]={0.44,0.34,0.44,0.34};
{{-0.02,-ym,z1+0.02,0},{-0.02,-ym,z0,0}},
{{fs/2,0,z1,0},{-fs/2,0,z1,0}},
{{-0.02,ym-k,z0,0},{-fs+fl*(1-cos(footc)),ym-k,z0+fl*sin(footc),1}},//7
{{-0.02,ym,z0,0},{-0.02,ym,z1+0.02,0}},
ankle[i].geom=dCreateSphere(space,ankle[i].r);
dGeomSetBody(ankle[i].geom,an*********make joint*************************//
dGeomID ground=dCreatePlane(space,0,0,1,0);
dJointGroupID contactgroup=dJointGroupCreate(0);
dsFunctions fn;
dReal footc=0.4*M_PI; //footc:足補助角度
torso.geom=dCreateBox(space,torso.x,torso.y,torso.z);
dGeomSetBody(torso.geom,torso.body);
for(int i=0;i<2;i++)
for(int j=0;j<2;j++)
{
arm[i][j].body=dBodyCreate(world);
{
leg[i][j].body=dBodyCreate(world);
dMassSetZero(&mass);
dMassSetCapsuleTotal(&mass,leg[i][j].m,3,leg[i][j].r,leg[i][j].l);
dBodySetMass(leg[i][j].body,&mass);
//**************body parameter***************//
dReal arm_x[2][2]={{0,0},{0,0}},arm_y[2][2]={{-0.08,-0.08},{0.08,0.08}},arm_z[2][2]={{0.4,0.28},{0.4,0.28}};