导线观测资料及导线加密点平差资料
导线水准点复测及加密联测规范
项目导线点、水准点复测及加密联测规范1 目的通过对设计院提供的导线点、水准点的复测和对不能满足施工放样的段落进行导线、水准点加密、联测,并制定复测,确保控制点成果的准确性与可靠性,制定本规范。
2 适用范围适用于路面工程施工中导线点、水准点复测及加密联测过程中因测量导致的质量事故。
3 职责3.1 项目总工程师负责调查和处理导线点、水准点复测及加密联测过程中因测量导致的质量事故。
3.2 测量队队长全面负责导线点、水准点复测及加密联测工作;负责对观测数据进行平差计算与成果分析;并负责将复测成果上报监理组。
3.3 测量队其他人员负责协助测量队队长对导线点、水准点复测和资料整理等工作。
4 工作流程5 规范与标准5.1 交桩5.1.1 项目开工前,项目总工程师负责联系设计院代表和测量监理工程师,进行交桩。
由测量队直接接管设计院移交的控制点,测工应在控制点旁做上醒目标记,以便在后续的复测工作中能迅速找到点位。
5.2 导线、水准点的加密5.2.1 布点思路与注意事项5.2.1.1 对设计院提供的控制点过稀或太远而不能满足施工放样时,需要加密布点联测。
5.2.1.2 测量队队长负责选点工作,布点时应尽量布在桥梁或小型结构物上,通视良好。
填方低于1m以下的路段可采用左右交叉“之”字型布设,高于1m以上的路段可选择同侧布设,这样可以方便后续的测量放样工作。
5.2.1.3 具体点位应选在建筑红线外(20m~100m范围内)土质坚硬、视野开阔、宜于长期保护的地方,相邻边长应控制在30m~500m之间。
5.6.1.4 选好的点位应用木桩做好标志,方便测工在埋点时能准确找到位置。
5.2.2 点位的埋设加密点的埋设深度不得小于50cm,采用带有十字丝的钢筋头以C20混凝土现浇的方式进行。
砼桩下口为50cm×50cm,上口为30cm×30cm,以提高点位的稳固性。
同时用红油漆进行全线统一编号。
5.2.3 加密导线点与水准联测精度要求与观测要点同“导线水准点复测”要求。
闭合导线的连接角观测与平差
闭合导线的连接角观测与平差
1.引言电力系统导线的布设与拉放运行,是现代电力系统的基础工作,近年来,也是电力系统安全稳定经济运行的基础保证。
关闭合导线的连接
角观测与平差是导线拉放安全运行中不可或缺的步骤。
因此,关闭合导线
的连接角观测与平差及其相关理论以及计算方法非常重要。
2.关闭合导线的连接角观测方法关闭合导线的连接角观测主要是通过
视觉观测,以确定导线连接时一段导线在另一段导线上的角度。
视觉观测
的基本原理是:当两条导线的连接点由连接后的导线的起点和终点确定时,利用水准仪和晴空条件下的太阳光,可以由起点处对终点的观察而得出导
线角度。
3.平差方法平差计算是连接角观测的延伸,主要目的是通过控制平差
误差获得一个最优的连接角。
关闭合导线的连接角平差一般采用最小二乘法,即把每个观测点都视为未知数,求解给定观测值下的最小角度误差的
最优解。
4.结论关闭合导线的连接角观测与平差是确保导线的安全拉放的重要
步骤,随着电力系统的发展,电力系统的连接角观测与平差工作也在不断
发展,并在实践中取得良好的效果。
测量红头文件
安徽省公路桥梁工程公司
文件水盘高速公路19标项目经理部
水盘19标项目经理部〔2009〕01号
关于加密导线、水准复测的报告
水盘高速TC-B-2驻地办:
我项目部根据工程施工需要和监理办要求于2010年7月30日开始导线、水准复测工作,至2010年12月27日结束。
导线复测由ID028、ID027附合到ID025、ID024, K=1/16633<K容=1/15000。
水准复测由BM22附合到BM26,f h=-14mm<f容=±25√L=±52.6mm.桥梁和隧道导线控制网测量精度均符合≤公路勘测规范≥(JTJ061-99)要求。
附件:测量说明与总结,四等观测手簿
水准点成果表,导线观测记录表
导线成果表控制网示意图
符合水准路线高层平差计算表,
导线平差计算表,
主题词:导线水准复测报告
主报:水盘高速 JC-B-2驻地办
抄报:
水盘19标项目经理部 2010年12月30日印发共印5份。
导线、高程(加密)复测成果报告

新建简蒲高速公路(K278+940~K308+727)导线、高程(加密)复测成果报告部门: 综合办公室汇报人:王永玉编制:审核:批准:中铁十五局集团有限公司简蒲高速公路JPLM-4标段项目经理部二〇一六年一月四日目录一、工程概况 (1)二、任务概述 (1)三、既有资料情况 (1)四、主要技术依据 (2)五、复测实施情况 (2)六、成果技术要求 (2)简蒲高速公路JPLM-4标段复测成果报告一、工程概况本项目为成都经济区环线高速公路简阳至蒲江段JPLM-4标段,本标段线路起于K278+940。
线路经K280+117下穿成绵乐客专,于K280+642上跨成昆铁路,于K281+120上跨成乐高速(G93),于K306+311贯穿长秋山隧道,于K308+727连接成雅高速,途经有东坡永丰枢纽互通、东坡悦兴互通、东坡多悦互通、蒲江天华枢纽互通,其主要交通流为眉山至蒲江方向。
标段内全线长29787米,本标段以平原微丘地形为主,呈东西向平原;沿线多树林和民房且跨越高铁桥和高速公路,通视条件较差。
二、任务概述新建简蒲高速公路平面及高程控制网复测、加密。
复测线路起始里程为K278+940~K308+727,路线全长29.787公里。
工作内容为平面控制网和高程的外业观测及平差计算。
外业起始时间2015年09月15日至2015年10月5日,内业处理时间为2015年10月6日。
由中铁十五局集团简蒲高速JPLM-4标项目部组织测量队进行测量。
参加复测人员6人,测量工程师3人,测工3人(测量人员资质见附件)。
三、既有资料情况四川省交通运输厅公路规划勘察设计研究院提供的《成都经济区环线高速公路简阳至蒲江段控制测量成果表》。
四、主要技术依据(1)《公路工程技术标准》JTGB01-2003;(2)《公路勘测规范》JTGC10-2007;(3)《公路工程测量规范》JB50026-2007;(4)建设部颁发的有关规范和规程;(5)《全球定位系统(GPS)测量规范》(TB10054-2010);(6)地方政府、交委颁发的文件、规范与规程。
导线测量观测记录表及计算

表单模板观测:现场签字 记录:现场签字 前视:现场签字 后视:现场签字 计算:现场签字 复核:现场签字填表说明一、填表须知本表适用于加密控制点、施工加密桩导线测量(复测)观测记录填写。
本表所填写内容应真实可靠,无虚假成份。
二、填写流程准备工作:填写工程名称→导线名称→天气→年月日→仪器型号→仪器编号→加常数K →乘常数R→气压mb(录入仪器)→温度℃(录入仪器)。
记录内容:填写测站点号→测回数→照准点号→正镜照准目标点(测量并记录角度和距离)→倒镜照准目标点(测量并记录角度和距离)→计算2C(超限应重测)→计算正倒镜平均值、归零后的方向值、角度平均值、距离平均值。
签字确认:复核无误后,现场签字确认。
三、内容要点导线测量的布网、观测(设站、测设)、计算、平差等工作及精度要求,应根据工程特点执行相应的规范、标准、规程要求。
观测前,应对所使用的仪器和设备进行常规检校,检查仪器内部参数设置是否正确。
各测回间宜按180除以测回数配置度盘。
观测结束后,应对外业记录手簿进行检查,当使用电子记录时,应及时导出原始观测记录并打印保存。
应取各测回水平角、平距观测的平均值作为测站成果。
四等导线测回数:0.5″级2测回、1″级4测回、2″级6测回;一级导线测回数:2″级2测回。
四、注意事项采用闭合导线进行施工加密桩测量时必须检查3个已知点的几何关系。
正倒镜:盘左是指观测者对着望远镜的目镜时,竖盘位于望远镜的左边,又称为正镜。
盘右是指观测者对着望远镜的目镜时,竖盘位于望远镜的右边,又称为倒镜。
一测回内2C互差或同一方向值各测回较差超限时,应重测超限方向,并应联测零方向。
所有施工测量工作都必须执行测量复核制。
表格应做到填写规范、字迹清晰、内容完整、签字齐全。
本表未尽事宜,参见国家行业规范、标准及集团公司下发的有关文件。
第 页,共 页观测: 记录: 前视: 后视: 计算: 复核:。
导线平差计算表格及解析

闭合导线坐标计算
注:黄色部分为外业测量出的或者是已知的;
“n”:多边形内角的个数;
“ƒβ容”:图根导线角度闭合差的容许值为±60″√n,当图根导线作为测区的首级控制网时为±40″√n;
β=β测-ƒβ n;
在这儿坐标方位角的计算就不说了;
△x i,1+i=D i,1+i*cosαi,1+i; △y i,1+i=D i,1+i*sinαi,1+i;
ƒx=Ʃ△x,ƒy=Ʃ△y;
导线全长闭合差ƒ=√(ƒ2x+ƒ2y),相对闭合差K=ƒ∕ƩD,图根导线的容许相对闭合差K容=1∕2000,当K<K容时则说明符合精度要求,可以进行调整,
υ△xi,1+i=-(ƒx∕ƩD)*D i,1+i,υ△yi,1+i=-(ƒy∕ƩD)*D i,1+i;
△x △y x y
υ△xi,1+i υ△yi,1+i ±±
△x i,1+i
△y i,1+i
Ʃ
ƩD ƒx ƒy
辅助计算
观测角 (β测) ′ ″改正数
(β) 改正后角度 ′ ″
坐标方位角 ′ ″
56序号1234△x′△y′ƒβ角度闭合差=Ʃβ测-Ʃβ
理=Ʃβ测-(n-2)*180; ƒβ
≤ƒβ容;
ƒx=Ʃ△x,ƒy=Ʃ△y; ƒD =√(ƒ2x +ƒ2y )
注:1、附合导线和闭合导线的差别在于两个方面:①角度闭合差的计算和调整,②坐标增量闭合差的计算;(怎么计算就不一一说了,见谅!)
坐标增量 m 改正后增量 m
坐标值 m 距离 m。
全站仪坐标导线测量的平差方法

随着全站仪在工程测量中应用的逐渐普及,采用导线作为测量的平面控制越来越广泛,导线一般多布设成单一导线。
应用全站仪观测导线,可以通过机内的微处理器,直接得到地面点的平面近似坐标,因此在成果处理时可以应用这些近似坐标直接按坐标平差(即间接平差)法进行平差。
本文主要针对采用全站仪观测导线的近似平差和严密平差方法进行探讨。
导线的近似坐标平差导线测量用于图根控制等低精度测量中,往往采用近似平差即可。
由于全站仪直接测定各导线点的近似坐标值,平差计算就不用像传统的导线近似平差计算那样,先进行角度闭合差计算和调整,然后推算方位角,再进行坐标增量闭合差的计算和调整,最后根据平差后的坐标增量计算导线点的坐标。
全站仪观测导线直接按坐标平差计算,将更为简便。
直接按坐标平差法计算步骤如下:假设有一条附合导线,由于存在观测误差,最后测得的一点(假设为C)坐标与该点已知坐标(xc,yc)不一致,其差值即为纵、横坐标增量闭合差,即(1)导线全长闭合差为f:(2)导线全长相对闭合差为:(3)此时若满足要求的精度,就可以直接根据坐标增量闭合差来计算各个导线点的坐标改正数,各导线点的坐标改正值计算公式为:(4)改正后各点坐标xi、yi为:(5)式中,∆x1、∆x2、∆x i、∆y1、∆y2、∆y i、分别为第一、第二和第i条边的近似坐标增量;x i’、y i’为各待定点坐标的观测值(即全站仪外业直接观测的导线点的坐标)。
采用坐标法进行导线近似平差,直接在已经测得导线点的坐标上进行改正,方法简单,易于掌握,避免了传统近似平差法的方位角的推算和改正,以及坐标增量的计算和改正,能大大提高工作效率,而且不易出错。
同时可以看出传统附和导线测量需要两条已知边,作为方位角的检核条件,而直接坐标法,只需要一条已知边和一个已知点即可,使导线的布网更加灵活。
导线的严密坐标平差采用全站仪观测导线的优势高等级平面控制测量对精度的要求较高,需要严密平差。
全站仪观测的导线采用严密坐标平差法较为适宜。
导线测量平差记录表
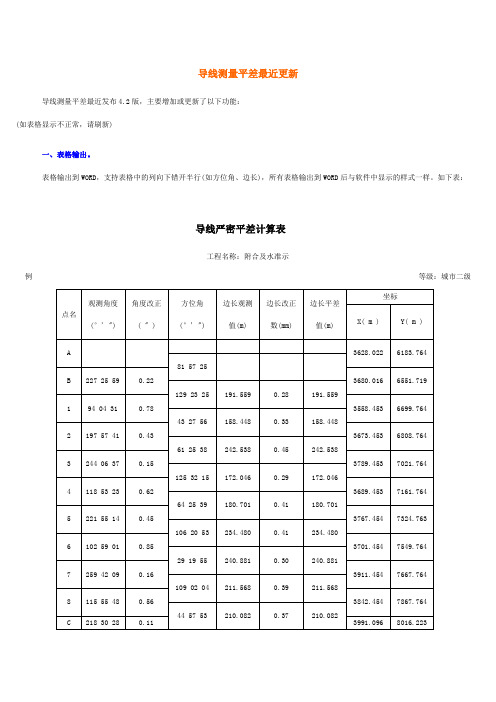
导线测量平差最近更新导线测量平差最近发布4.2版,主要增加或更新了以下功能:(如表格显示不正常,请刷新)一、表格输出。
表格输出到WORD,支持表格中的列向下错开半行(如方位角、边长),所有表格输出到WORD后与软件中显示的样式一样。
如下表:导线严密平差计算表工程名称:附合及水准示例等级:城市二级计算者:杨运英校核者:日期:2003.08.28二、导线采用近似平差且方位角边长不进行反算时的表格样式。
原表格中显示的是坐标增量改正数,现增加了一个选项,可以选择显示改正后的坐标增量,以满足一些工程要求格式统一的要求。
导线平差计算表工程名称:附合及水准示例等级:城市二级计算者:杨运英校核者:日期:2003.08.28、坐标导线平差。
指使用全站仪直接观测坐标、高程的闭、附合导线,其中平面坐标完全差的分配方式可以选用“按边长”、“按坐标增量”、“坐标转换”等方式。
坐标导线平差计算表工程名级:城市二级:杨运英校核者:日期:200四、单面单程水准记录计算已知点较密时线路中间也可以穿过已知点。
当含有中视时可以用于中平测量等,表格形式如下:水准测量记录计算表测线:仪器:观测:天气:地点:记录:计算者:校核者:日期:不含有中视时可用于五等、等外水准等的记录、计算。
表格形式如下:水准测量记录计算表测线:仪器:观测:天气:地点:记录:计算:校核:日期:部测量知点设站,后视另一已知点,观测各碎部点,计算其坐标、高程,绘制图形并可输出到CAD。
方式可以选用“斜距+天顶距”、“平距+高差”或“视距+天顶距”。
距+高差”方式表格如下:碎部测量记录后视:B 测站高程:仪高:气:复核:距”(或“斜距+天顶距”)表格如下:碎部测量记录后视:B 测站高程:指标差:0" 天气:记录:日期:坐标转换于同椭球的不同坐标系间进行转换。
比如同椭球的国家坐标系与工程独立坐标系的转换。
坐标转换计算表工程名第页计算:复核:日期:支导线计算里指输入方位角与边长计算坐标的支导线,如需输入水平角、边长计算各点坐标,请使用“平差计算”模块中的支导线进行计算。
(整理)导线测量平差教程—计算方案设置

计算方案的设置一、导线类型:1.闭、附合导线(图1)2.无定向导线(图2)3.支导线(图3)4.特殊导线及导线网、高程网(见数据输入一节),该选项适用于所有的导线,但不计算闭合差。
而且该类型不需要填写未知点数目。
当点击表格最后一行时自动添加一行,计算时删除后面的空行。
5.坐标导线。
指使用全站仪直接观测坐标、高程的闭、附合导线。
6.单面单程水准测量记录计算。
指仅进行单面读数且仅进行往测而无返测的水准测量记录计算。
当数据中没有输入“中视”时可以用作五等、等外水准等的记录计算。
当输入了“中视”时可以用作中平测量等的记录计算。
说明:除“单面单程水准测量记录计算”仅用于低等级的水准测量记录计算外,其它类型选项都可以进行平面及高程的平差计算,输入了平面数据则进行平面的平差,输入了高程数据则进行高程的平差,同时输入则同时平差。
如果不需进行平面的平差,仅计算闭、附合高程路线,可以选择类型为“无定向导线”,或者选择类型为“闭附合导线”但表格中第一行及最后一行数据(均为定向点)不必输入,因为高程路线不需定向点。
二、概算1.对方向、边长进行投影改化及边长的高程归化,也可以只选择其中的一项改正。
2.应选择相应的坐标系统,以及Y坐标是否包含500KM。
选择了概算时,Y坐标不应包含带号。
三、等级与限差1.在选择好导线类型后,再选择平面及高程的等级,以便根据《工程测量规范》自动填写限差等设置。
如果填写的值不符合您所使用的规范,则再修改各项值的设置。
比如现行的《公路勘测规范》的三级导线比《工程测量规范》的三级导线要求要低一些。
2.导线测量平差4.2及以前版本没有设置限差,打开4.2及以前版本时请注意重新设置限差。
四、近似平差与严密平差的选择及近似平差的方位角、边长是否反算1.近似平差:程序先分配角度闭合差再分配坐标增量闭合差,即分别平差法。
2.严密平差:按最小二乘法原理平差。
3.《工程测量规范》规定:一级及以上平面控制网的计算,应采用严密平差法,二级及以下平面控制网,可根据需要采用严密或简化方法平差。
导线简易平差方法
角度 改正值
″
坐标 方位角
°′″
距离
D(m)
纵坐标增量值 纵坐标值 横坐标增量值 横坐标值
△X(m)
∨X (mm)
X,N(m)
△Y(m)
∨Y (mm)
Y,E(m)
3
4
5
6
7
8
9
10
11
9
20
9
104 297.260
9
72 187.812
9
106 93.400
9
6 150.642 149.714
283
1864.222 1970.220
287.788 178.868 89.593 16.692
1413.350 1986.385
总和 803 45
n= 5
辅 助 计 算
fβ= -45″ 检核fβ=± 40″ 5 = 89″
X,N(m)
△Y(m)
∨Y (mm)
Y,E(m)
3
4
5
6
7
8
9
10
11
9
20
1864.222
1413.350
9
104 297.260 74.441 60
x理 xc xB
y理 yc yB
由于调整后的各转折角和实测的各导线边长均含有误差,导致由它们为基础计算的各边纵、 横坐标增量,其代数和不等于附合导线终点和起点的纵、横坐标之差,差值即为纵、横坐标增量 闭合差 f x 和 f y ,即:
f x x x理 x ( xC xB ) f y y y理 y ( yC yB )
,按方位角公式推算出终边CD的坐标
全站仪平差方法
全站仪坐标导线测量及平差方法的比较引言多年来,全站仪以其自动化快速三维坐标测量与定位功能,和数据采集方面的自动数据流实现外业数据的电子记录以及从外业到内业一体化的自动流程这两大特点而倍受人们的青睐。
不仅在测绘、建筑工程、交通与水利工程、地籍与房地产中大显身手,而且在大型工业生产,构件装调以及体育竞技等领域中也得到重视和应用。
全站仪是集光、机、电、磁、微电脑等技术于一体,汇集现代科技最新成果于一身,具有小型、便捷、高精度、多功能和自动化等特点的新一代综合性测绘仪器。
目前,全站仪已从普通型发展到精密的电脑智能型,除能进行常规的测角、测距外,还具有多种专用功能,利用其三维坐标测量功能可进行导线型坐标测量,直接获取各导线点的三维坐标,称此种导线为全站仪导线。
针对全站仪导线,如何对其坐标观测数据进行平差处理以求得合理的结果呢? 这是学术界一直在探讨的一个问题,并且近年来各种全站仪坐标导线平差方法不断提出。
1 全站仪坐标导线测量以附合导线为例,如图1 所示,A ,B ,C ,D 为已知控制点,中间各点为导线点,全站仪导线测量方法如下:首先将全站仪安置于已知点B 上,利用全站仪的三维坐标测量功能和微电脑记忆功能,输入已知点A ,B 的三维坐标、方位以及仪器和觇标高度后,全站仪瞄准A 点定位,测记前视导线点2坐标;然后将仪器移至2 (关电源) ,继续不断测记新导线点3 ,4 , ⋯坐标。
全站仪将自动地显示各导线点的三维坐标,并记录在电子手簿上,而不需内业计算,直接在现场完成三维导线测量。
2 几种平差方法简述1) 第一种方法称为坐标转换平差法,其基本思想就是:通过坐标的旋转、平移和尺度统一等转换方法将带有观测误差的坐标值归算到平差后的坐标值。
具体做法是,先根据导线起点和终点的坐标闭合差计算出坐标转换参数,再以求得的转换参数对其他导线点的观测坐标进行转换,求得各点的坐标改正数,从而求得各导线点的平差坐标[ 1 ] 。
附合导线严密平差算法总结
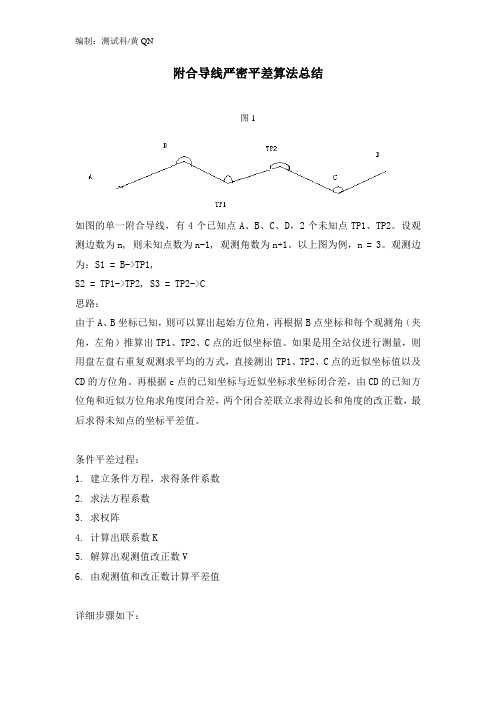
附合导线严密平差算法总结图1如图的单一附合导线,有4个已知点A、B、C、D,2个未知点TP1、TP2。
设观测边数为n, 则未知点数为n-1, 观测角数为n+1。
以上图为例,n = 3。
观测边为:S1 = B->TP1,S2 = TP1->TP2, S3 = TP2->C思路:由于A、B坐标已知,则可以算出起始方位角,再根据B点坐标和每个观测角(夹角,左角)推算出TP1、TP2、C点的近似坐标值。
如果是用全站仪进行测量,则用盘左盘右重复观测求平均的方式,直接测出TP1、TP2、C点的近似坐标值以及CD的方位角。
再根据c点的已知坐标与近似坐标求坐标闭合差,由CD的已知方位角和近似方位角求角度闭合差,两个闭合差联立求得边长和角度的改正数,最后求得未知点的坐标平差值。
条件平差过程:1.建立条件方程,求得条件系数2.求法方程系数3.求权阵4.计算出联系数K5.解算出观测值改正数V6.由观测值和改正数计算平差值详细步骤如下:1、建立条件方程在单一附合导线中,只需要三个条件方程即:方位角附合条件、纵坐标附合条件和横坐标附合条件方程。
(省略了条件方程的推导过程,详细过程请查看参考资料:《测量平差.pps》)(1)方位角附合条件[Vβi]n+11+ Wβ= 0式中,Wβ= - (T0– T CD+ [βi]n+11 - (n+1)*180°)(角度闭合差)βi ——角度观测值(夹角,左角)Vβi ——各观测角的改正数。
如果是用全站仪观测,则Wβ= - (T CD– T CD)式中,T CD ——CD的方位角观测值,T CD ——CD的已知方位角(2)纵坐标X附合条件方程[Cos TI * VSi]1n - (1/ ρ”)* [(Yn+1- Yi) * Vβi]1n - W x = 0;式中,TI——各方位角观测值(近似值)VSi——边长改正数Yn+1—— C点即终止点的横坐标Y的观测值(近似值)Yi——待定点的横坐标Y的观测值Wx = - (Xn+1- XC)XC—— C点即终止点的纵坐标X的已知值ρ” = 2062.65(3)横坐标Y附合条件方程[Sin TI * VSi]1n + (1/ ρ”)* [(Xn+1- Xi) * Vβi]1n– W Y = 0;式中,TI——各方位角观测值(近似值)VSi——边长改正数Xn+1—— C点即终止点的纵坐标X的观测值(近似值)Xi——待定点的纵坐标X的观测值WX = - (Yn+1- YC)YC—— C点即终止点的横坐标Y的已知值ρ” = 2062.652、求条件方程的系数矩阵联立3个方程得改正数条件方程组:[Vβi]n+11+ Wβ= 0[Cos TI * VSi]1n - 1/ ρ”* [(Yn+1- Yi) * Vβi]1n - W x = 0;[Sin TI * VSi]1n + 1/ ρ”* [(Xn+1- Xi) * Vβi]1n– W Y = 0;其系数矩阵arrA为:(即改正数V的系数,此处以图1为例, n = 3)3、联系数法方程(简称法方程)AP-1A T K – W = 0A——系数矩阵arrAK ——乘系数P ——权阵W ——闭合差矩阵由上得法方程的系数阵N:N = AP-1A T(权的推导见参考资料:《全站仪观测导线测量平差方法的研究.pdf》)角度权:P βi = 1;(因为角度的标称精度是固定的,各观测角权值相等) 边长权:P Si = (μ0 *μ0 ) / (M D * M D )(误差比例系数固定,边长的误差与距离有关,因此不一致)式中,μ0 ——先验测角中误差,以秒为单位 M D —— 距离观测中误差若 导线边长为S i (米),e1 为仪器的边长标称固定误差(mm ),e2为仪器的边长比例误差系数(无单位),则M D = ± (e1 + e2 * S i * 0.001)mm 需转化为厘米:M D = M D ** 0.1 (cm )由于此处是要P 的逆矩阵P -1,因此要求P 的各元素的倒数(P 是对角矩阵,对角矩阵的逆矩阵就是原矩阵元素的倒数) Psi = 1/ Psi ;由上可得,P -1 矩阵如下:4、求改正数由于N 已经在前面的步骤中求出,求N 的逆矩阵。
专业资料附和闭合左右角导线附合导线自动计算表

附合导线平差计算表(左角用)
计算:检查:
注意事项:
1、使用时,先根据实际点数的多少插入或删除行数。
但第五行和第六行不得删除,夹角个数行及上6行不要删除,目的是为了保
持公式的正确性,行数确定后,从第六行F列到W列选中,把公式拉到您需要的行数
2、“蓝色”字体表示计算时,需要输入的项目,根据实际数据情况进行填写。
3、要根据使用的等级导线,来修改“角度闭合差限差”计算公式(N20数据)及“导线全长相对闭合差”(Q22数据)
4、如果“N21”和“Q22”显示超限则数据不可用,要重新进行测量
5、计算好后可以把不需要显示的列隐藏起来,如“M”列
)
附合导线平差计算表(右角用)。
导线闭合差规范
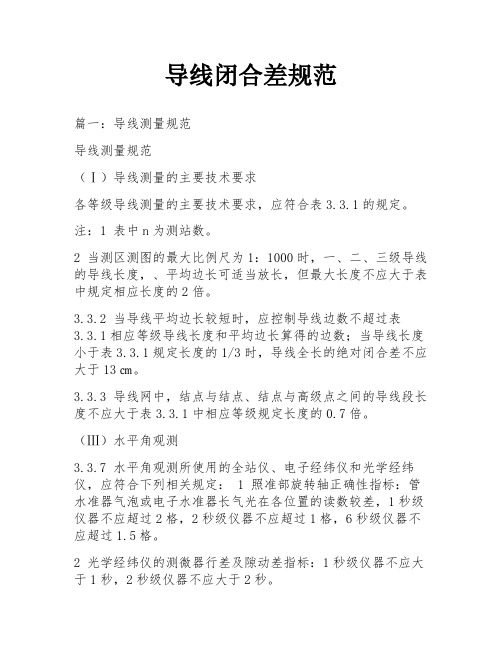
导线闭合差规范篇一:导线测量规范导线测量规范(Ⅰ)导线测量的主要技术要求各等级导线测量的主要技术要求,应符合表3.3.1的规定。
注:1 表中n为测站数。
2 当测区测图的最大比例尺为1:1000时,一、二、三级导线的导线长度,、平均边长可适当放长,但最大长度不应大于表中规定相应长度的2倍。
3.3.2 当导线平均边长较短时,应控制导线边数不超过表3.3.1相应等级导线长度和平均边长算得的边数;当导线长度小于表3.3.1规定长度的1/3时,导线全长的绝对闭合差不应大于13㎝。
3.3.3 导线网中,结点与结点、结点与高级点之间的导线段长度不应大于表3.3.1中相应等级规定长度的0.7倍。
(Ⅲ)水平角观测3.3.7 水平角观测所使用的全站仪、电子经纬仪和光学经纬仪,应符合下列相关规定: 1 照准部旋转轴正确性指标:管水准器气泡或电子水准器长气光在各位置的读数较差,1秒级仪器不应超过2格,2秒级仪器不应超过1格,6秒级仪器不应超过1.5格。
2 光学经纬仪的测微器行差及隙动差指标:1秒级仪器不应大于1秒,2秒级仪器不应大于2秒。
3 水平轴不垂直于垂直轴之差指标;1秒级仪器不应超过10秒,2秒级仪器不应超过15秒,6秒级仪器不应超过20秒。
4 补偿器的补偿要求:在仪器补偿器的补偿区间,对观测成果应能进行有效补偿。
5 垂直微动旋转使用时,视准轴在水平方向上不产生偏移。
6 仪器的基座在照准部施转时的位移指标:1秒级仪器不应超过0.3秒,2秒级仪器不应超过1秒,6秒级仪器不应超过1.5秒。
7 光学(或激光)对中器的视轴(或射线)与竖轴的重合度不应大于1㎜。
3.3.8 水平角观测宜采用方向观测法,并符合下列规定: 1 方向观测法的技术要求,不应超过表3.3.8的规定。
1注;1 全站仪、电子经纬仪水平角观测时不受光学测微器两次重合读数之差指标的限制。
2 当观测方向的垂直角超过±30的范围时,该方向2C互差可按相邻测回同方向进行比较,其值应满足表中一测回内2C互差的限值。