ROS的备份和恢复
ros命令大全

OUTERO S常用命令/syreset恢复路由原始状态/syreboo t 重启路由/s y sho wdown关机/sy i de se t nam e=机器名设置机器名/ex port查看配置/i p exp ort 查看IP配置/sy back up 回车save name=你要设置文件名备份路由LOA D NAM E=你要设置文件名恢复备份/i nterf ace p rint查看网卡状态0 X et her1ether 1500这个是网卡没有开启0 Rether1 eth er 1500 这个是正常状态/int en 0激活0网卡/i nt di 0 禁掉0网卡/ip f ir co n pri nt 查看当前所有网络边接/ipservi ce se t www port=81 改变www服务端口为81 /iphotsp ot us er ad d nam e=use r1 pa sswor d=1 增加用户ROS基本的设置向导基本的设置向导文档版本0.3.0 (Fri Mar05 07:52:32 GMT 2004)这个文档只试用于 Mik roTik Rout erOSV2.8目录目录概要相关的文档描述建立 Mik roTik Rout erOS?描述注意记录在M ikroT ik 路由器描述添加软件包描述终端控制台导航描述注意基本的配置作业描述注意基本的实例实例观察路由增加缺省的路由测试网络的连通性高级的配置作业描述Appl icati on Ex ample with Masq uerad ing 带宽管理实例NA T实例总的说明概要Mikro Tik R outer OS? 是独立于li nux操作系统的IA-32 路由器和瘦路由器. 它不要求添加任何额外的部件又没有软件需求.它被设计成简单又易于使用的强大的接口允许网路管理员配置网咯结构和功能, 这要求你任何时间任何地点的学习下面这参考手册.有关的文档?包管理设备驱动列表许可证管理? Ping服务质量防火墙过滤? Winb ox描述Mi kroTi k Rou terOS?可以把一台过时的表准PC变成一个强大的网络路由器.仅仅标准的PC网络接口就可以扩充路由器的能力,远程wi ndows(WinB ox)应用程序时时控制.?专业的质量控制和爆发式的支持完善的防火墙和P2P协议过滤,隧道和I PsecST P bri dging with filt ering capa bilit ies 超高速的 802.11a/b/g 无线网同W EP? WDS和虚拟的AP特征Ho tSpot适于即插即用访问RI P, OS PF, B GP 路由协议?支持千兆以太网V.35, X.21, T1/E1同步支持异步 PPP同 RAD UIS A AA? IP 电话远程 wi nboxGUI 管理telne t/ssh/并行控制台管理时时配置和监视还有更多的 (请看详细的使用说明t)这个向导描述了基本的安装步骤和配置一台专业的P C路由器的运行Mik roTik Rout erOS?.建立 Mikr oTikRoute rOS?描述下载并安装 Mikr oTikRoute rOS?Mikr oTikRoute rOS?的下载和安装是在下列图表中描述的:1. 下载基本的安装文件.依*你想要的介质用来作安装Mik roTik Rout erOS?请选择以下几种方式下载? ISOimage–安装CD,如果你又一台可擦写的CD ROM .这个IS O映象文件是MT cdima ge_v2-8-x_dd-mm m-yyy y_(bu ild_z).zip文档包含一张可引导的CD .CD可以从一台标准的PC上引导安装到硬盘和fl ash设备上.? Neti nstal l –如果想从网络上安装R outer OS,你需要LAN和一张可引导导入软盘,或使用P XE支持网络引导的网卡两者可选其中之一,.网络安装程序必须工作在W indow s 95/98/NT4/2K/XP. Mi kroTi k磁盘的创建-如果你想要创建3.5”的安装软盘,软盘的创建者是一个自解压的文件D iskMa ker_v2-8-x_dd-m mm-yy yy_(b uild_z).ex e,它应该是在你的w indow s95/98/NT4/2K/X P工作站上创建的安装软盘.安装软盘将被用于启动专用的PC并且在你的硬盘上或fla sh设备上安装Mik roTikRou terOS?.2. 创建安装介质使用适当的安装文件创建安装cd或软盘.把I SO 映象写入一张空的 CD.就这张软盘,在你的win dows工作站上运行制造安装软盘制造的安装软盘.把以下软盘按顺序插入你的软驱中.要求把磁盘1把他们标记2,3等等.3.安装Mikr oTikRoute rOS?软件.你专用的PC路由器的硬件应该有:C PU 和主板–更先进的地代的C PU (核心频率100MHz或更高),新生产的(Intel Pent ium,Cyrix 6X86, AMD K5 或兼容的)或更新的I ntelI A-32(i386)兼容(多样的处理器是不支持的)RAM –最小的48 MB,最大的1 GB;推荐是64 MB或更高的? Hard Driv e/Fla sh –标准的A TA接口控制器和设备(SCSI和USB控制器和设备是不支持的;RAID控制器和那些附加的设备是不支持的)和最小64MB空间,在安装路由器时选择的安装方法必须有下列硬件:Fl oppy-基于软盘的安装–标准的AT软盘控制器和3.5\'\'的磁盘作为第一个连接了的设备;AT,PS/2或US B键盘;V GA-兼容的视频控制卡和监视器.CD-基于CD的安装-标准的A TA/AT API接口控制器和C D驱动器支持"ElTori to"可引导的CD盘(如果路由器的BIO S是否支持这个类型启动的介质时那你可能需要另外检查); AT, PS/2或USB键盘;VGA-兼容的视频控制卡和监视器.? Flop py-基于网络的安装-标准的A T软盘控制器和3.5\'\'软盘设备作为第一个软驱连接的设备;Mikr oTikRout erOS支持的PCI总线以太网咯接口卡(详见设备驱动列表)Fu ll ne twork-基于完全的网络安装- Mik roTikRou terOS支持的PC I总线以太网咯接口卡((详见设备驱动列表)与PXE或可以引导网卡的RO M(如果你的路由器B IOS的列表支持启动你的网路卡你需要另外检查)注意如果你使用网络安装,你在安装期间必须有软件的安装许可(在下一节中有详细的描述怎么使用它).在专用的PC路由器从你创建的安装介质上启动你的安装并且在Mikro Tik R outer OS的控制台屏幕上要求你的HDD是被重新格式化的.在成功安装了此软件后它提示你移除从你的CD盘或软盘并按下\'Ent er\'重启你的路由器.4. 软件的许可证.但重新引导后, 这软件许可证允许你使用此软件所有功能只有24小时.如果你在使用期间没有输入新的软件许可证,它将停止工作,直到你重新输入软件许可证.Rou terOS许可证是以软件ID s认证为基础的. 为了得到许可证, 你必须知道软件的ID号. 它是软件在安装期间被显示的,你也可以通过系统控制台或Winbo x. 去取得软件的I D . 从控制台的命令是:/syst em li cense prin t(注意 t这个ID是记录到你的路由器中; 通过这个缺省的用户:admin没有密码 (在pa sswro d提示符下键入 [E nter]键.你能获得一个ID:看到这部分一旦你有个ID,可以在以下部分配置这台路由器,. ?你可以有一个和存在我们的服务器帐户上一样的帐号.如果你在ww.mi kroti k.com 没有帐号,你可以在Mikro Tik\'s 主页上创建一个帐户.?根据你的需要选择合适的许可证. 请看L icens e Man ual 或Softw are p ricelist.注意这有一个自由的许可证但有功能上的限制(没有时间限制)?你可以在我们帐号服务器上用不同的方法取得软件许可证:1.键入软件的 ID进入帐号服务器, 并通过 e-m ail取得软件ID.你可以上传文件到你路由器的F TP服务器, 或用W inbox2.你可以用一个编辑器来打开这个文件, 并复制内容.粘贴这个文件到系统的控制台(你正好登陆到系统内的任一菜单中), 或你输入命令syste m->Li cense的窗口中或 Win box.3. 如果这台路由器已连接到Inter net,你可以直接的从我这里获得软件许可协议.这个命令描述是在L icens e Man ual里.注意你肯定已经允许在网路安装时使用我的帐号和为你的帐号已启用了.你能将它放在帐号服务器者的主要屏幕上的信息链接由以后变化的用户注意在安装期间硬盘将全部被重新格式化并且在它上的所有数据将被删除丢失!Mikro Tik Route rOS在安装一个新的硬件设备将丢失一个软件许可证,但是你不能把Rout erOS移动到不通的硬盘上你必须要重新购买另外的许可证(除了硬件有问题的状况).附加的信息可以些邮件到key-supp ort@m ikrot ik.co m. 注意!重新安装你的M ikroT ik路由器时不要使用MS-DO S操作系统形式的命令或另外的格式的磁盘!这将引起改变你的软件-ID,因此你需要另外的许可证运行在你Mikr oTik路由器上登陆到M ikroT ik 路由器中描述当你通过一台终端登陆到路由器中,将呈现出Mikro Tik R outer OS? 的登陆提示符.. 用户明是 \'admin\' 没有密码(按\'En ter\') 在第一时间内登陆到路由器中.实例:Mi kroTi k v2.8Lo gin:adminPas sword:使用这条命令来改变你密码 /pas sword comm and.[adm in@Mi kroTi k] >passw ord old p asswo rd: new p asswo rd: ************re typenew p asswo rd: ************[a dmin@Mikro Tik]>添加软件包描述最初的安装只包括系统软件包. 它包括基本的I P路由和路由器管理.想得到更多的功能像 IP电话, O SPF,无线网等,你需要下载添加软件包.这附加的软件包必须是和系统软件包的版本是一样的. 如果不是,这个包将不能安装.请参考M ikroT ik Ro uterO S? 软件包的安装和更新手册至于更夺得详细的安装说明请看安装附加的软件包.升级路由器的软件包, 通过f tp上传简单的软件包, 使用二进制传输模式.你上传软件包以后, 重启你的路由器,并且那些软件包提供的功能是可用的.(当然是关于你的许可证的类型).终端控制台导航描述屏幕欢迎提示和命令提示符以后你每次登陆到路由器这个 Mi kroTi k Rou terOS? 屏幕欢迎提示和命令提示符都会呈现在你面前,实例:MI KROTI KMi kroTi k Rou terOS 2.8(c) 1999-2004 http://www.mikr otik.com/Xter m 终端检测,使用多行输入模式[ad min@M ikroT ik] >这个命令在你的路由器上和路由器菜单的级别提示符显示的是等同的用户名, 实例:[a dmin@Mikro Tik]> ----------- 基本的菜单级别提示符[adm in@Mi kroTi k] in terfa ce> I nterf ace m anage ment[adm in@Mi kroTi k] ip addr ess>IP ad dress mana ngeme nt命令输入”?”将列出当前提示符和菜单级别下所有你可获得使用的命令,实例:证书管理设备驱动管理当地路由器文件的存储.导入,导出运行配置的脚本[admi n@Mik roTik] > Certi ficat e----------证书管理Dri ver---------------设备管理F ile------------------当地路由器文件的存储in terfa ce ------------接口配置log------------------系统记录p asswo rd ------------改变密码ping ----------------发送,回送ICM P数据包port -----------------串行端口q uit ----------------退出控制radi us---------------Rad ius客户机设置redo------------------- R edo p revio sly u ndone acti ons etup----------------基本的系统设置snmp-----------------SNM P 设置spec ial-l ogin-----------专用的登陆用户u ndo-----------------取先前的效果u ser-------------------用户管理ip--------------------- IP选项q ueue----------------------带宽管理sy stem------------------- 系统信息和有效的程序tool----------------------- 诊断工具expor t --------------------显示或保存导出的脚本那是用来恢复的配置[admin@Mikr oTik] >[admin@Mikr oTik] ip>acco untin g ------------------------交通统计add ress---------------------------地址管理ar p ---------------------------A RP 进入管理d ns ------------------------DNS设置firew all ------------------防火墙管理n eighb or ---------------------邻居pa cking ---------------------数据打包设定pool-------------------------IP地址池rou te-----------------------路由管理ser vice---------------------IP 服务po licy-routi ng ----------------路由政策upnp------------------------- Univ ersal即插即用vrr p------------------------虚拟路由沉余协议socks ----------------------SO CKS 版本4代理hots pot-------------------- H otSpo t 管理ipse c ------------------IP安全web-proxy -----------------HT TP 代理exp ort------------------------显示或保存导出的脚本那是用来恢复的c onfig urati on[admin@Mikr oTik] ip>列出可用的命令和菜单并有简短的描述到下一个项目.你可以移到你想到的那层菜单通过键入它的命令名和敲入这个[Ente r] ,实例:[adm in@Mi kroTi k] >基层的菜单[ad min@M ikroT ik] > driv er /键入 \'drive r\' 可以移动到设备这层菜单[ad min@M ikroT ik] d river> / 键入 \'/\' 从任一层返回基层的菜单[adm in@Mi kroTi k] >inter face/键入\'inte rface\' 移动到接口这层菜单[admin@Mikr oTik] inte rface> /ip /键入\'/ip\'移动到IP这层菜单[a dmin@Mikro Tik]ip> 一个命令或如果它是不完整的.实例,输入这个命令 in terfa ce你可以输入in或 int. 然后按 [Tab]键即可自动输入完整的命令.这个命令可以从菜单层调用, 在它们位于的地方,通过键入这个名字. 如果指令是在不同的菜单层,如果你想调用它要使用它的完整的路径,例如:[ad min@M ikroT ik] i p rou te> p rint/显示路由表[a dmin@Mikro Tik]ip ro ute>.. /地址显示和显示这IP地址表[admin@Mikr oTik] ip r oute> /IP地址显示和显示这IP地址表这个命令可能有参数.参数有它们的名字和价值.有些命令,可能会有参数但没有名字摘要在执行命令和导航菜单命令作用comma nd [E nter]执行这个命令[?] 显示出所有可用的命令列表com mand[?] 在命令和列表参数显示帮助co mmand argu ment[?] 命令参数显示帮助[Tab]完善命令/字符. 如果你不明确输入, 另一个 [T ab] 显示可能有选择/移动到基本的菜单层/命令字---------执行这层的命令.. 移动到另一层"" 指定空的字符串"wo rd1 w ord2"规定一串2个词或包含空的你在这层可以用缩写名字.命令或参数像IP地址的配置,而不是使用 \'a ddres s\'和\'netm ask\'参数,在多数情况下你可以指定地址加上数字代理网络掩码,没有必要分开指定\'net mask\'. 因此,下面两种输入的方式是等同的:/ip addr ess a dd ad dress 10.0.0.1/24 in terfa ce et her1/ipaddre ss ad d add ress10.0.0.1 n etmas k 255.255.255.0 inte rface ethe r1注意在地址参数中你必须指定网络掩码的大小, 即使它是32-bit 的子网, 使用 10.0.0.1/32 代替 add ress=10.0.0.1 netma sk=255.255.255.255 基本的配置作业描述接口管理以后配置这个 IP地址和路由请检查这个/inter face菜单查看可用的接口列表.如果在路由器中安装了即插即用的网卡,多数设备驱动都会自动载入系统中,和有关的接口都会出现在 /int erfac e pri nt 命令列表中,实例:[adm in@Mi kroTi k] in terfa ce> p rintFlag s: X- dis abled, D - dyna mic,R - r unnin g#NAMETYPERX-RA TE TX-RATE MTU0 Rether1 eth er 00 15001R eth er2 e ther0 0 1500 2 X w avela n1 wa velan 0 015003 Xprism1 wla n 0 0 1500[ad min@M ikroT ik] i nterf ace>如果你想使用它通讯,你必须打开这个接口.. 使用这个 /i nterf ace e nable name命令打开接口并给出名字,编号.实例:[a dmin@Mikro Tik]inter face> prin tFl ags:X - d isabl ed, D - dy namic, R - runn ing # NAM E TYP E RX-RATETX-RA TE MT U0X eth er1 e ther0 0 1500 1 X e ther2 ethe r 0 0 1500[ad min@M ikroT ik] i nterf ace>enabl e 0 [admi n@Mik roTik] int erfac e> en ableether2[a dmin@Mikro Tik]inter face> prin tFl ags:X - d isabl ed, D - dy namic, R - runn ing # NAM E TYP E RX-RATETX-RA TE MT U0R eth er1 e ther0 0 1500 1 R e ther2 ethe r 0 0 1500[ad min@M ikroT ik] i nterf ace>用来改变一个或多个接口的名字使用 /i nterf ace s et 命令:[a dmin@Mikro Tik]inter face> set0 nam e=Loc al; s et 1name=Publi c[a dmin@Mikro Tik]inter face> prin tFl ags:X - d isabl ed, D - dy namic, R - runn ing # NAM E TYP E RX-RATETX-RA TE MT U0R Loc al et her 0 0 15001 R Pu blicether 0 01500[adm in@Mi kroTi k] in terfa ce> 使用这个\'set up\'命令通过这个初始设置就可以完成路由器的简单设置,这个 /s etup命令可以打开接口,分配地址/网路掩码,配置缺省的路由. 如果你没有使用 setu p 命令,而且需要修改/添加设定地址和路由,请使用以下几步描述.注释载入的设备是 NE2000 或兼容的I SA 网卡你需要在/drive rs 菜单下使用ad d 命令.实例,装入网卡的 IO 地址 0x280 和IRQ 5, 输入完整的命令:[a dmin@Mikro Tik]drive r> ad d nam e=ne2k-isa io=0x280[adm in@Mi kroTi k] dr iver> prin tFl ags:I - i nvali d, D- dyn amic# DR IVERIRQ I O MEM ORY I SDN-P ROTOC OL0 D Re alTek 81391 D Inte l Eth erExp ressP ro2 D PC I NE2000 3 ISA NE2000 2804MoxaC101Synch ronou s C8000[admin@Mikr oTik] driv er> There aresomeother driv ers t hat s hould be a ddedmanua lly.请阅读手册的部分章节, 详细的说明请参照如何装载设备. 基本的实例假定在以下的网络设置中你需要配置这台 Mikr oTik路由器:在当前的实例中我们使用两快网卡:当地的网卡I P地址是192.168.0.0 和24-bit网络掩码: 255.255.255.0.路由器地址是在192.168.0.254 网络中.? ISP\'s 网络地址是10.0.0.0 和24-bi t网络掩码255.255.255.0.路由器地址是在10.0.0.217 网络中在以下命令中观察和使用这个地址是如何添加的:[ad min@M ikroT ik] i p add ress> addaddre ss 10.0.0.217/24 int erfac e Pub lic [admi n@Mik roTik] ipaddre ss> a dd ad dress 192.168.0.254/24 in terfa ce Lo cal [admi n@Mik roTik] ipaddre ss> p rintFlag s: X- dis abled, I - inva lid,D - d ynami c#ADDRE SS NE TWORK BROA DCAST INTE RFACE0 10.0.0.217/24 10.0.0.217 10.0.0.255Publi c1192.168.0.254/24 192.168.0.0 192.168.0.255 Lo cal [admi n@Mik roTik] ipaddre ss> 这里, 这个地址参数的网络掩码的范围必须在指定的范围之内.作为选择, 这个参数 \'n etmas k\' 这个值可以用 \'255.255.255.0\'代替.这个网路和广播地址不用提前指定在你输入时因为它可以自动计算. 请注意路由器在不同的网路这个地址分配给不同的接口.观察路由你可以看到两个动态dyn amic(D) a nd 已连接conn ected (C)路由, 当地址已添加了上面那个会自己添加. 在上面的这个例子:[admin@Mikr oTik] ip r oute> prin tFl ags:X - d isabl ed, I - in valid, D - dyna mic,J - r eject ed, C - c onnec t, S- sta tic,R - r ip, O - os pf, B - bg p#DST-A DDRES S G G ATEWA Y DIS TANCE INTE RFACE(目的地址 G-网关经过接口)0DC 192.168.0.0/24 r0.0.0.0 0Local1 D C 10.0.0.0/24 r 0.0.0.0 0 Publ ic[admin@Mikr oTik] ip r oute> prin t det ail (打印详情)Fla gs: X– di sable d(禁止), I – inva lid(无效的),D –d ynami c(动态的),J - re jecte d,(丢弃)C –conne ct(连接), S– sta tic(静态), R - r ip, O - os pf, B - bg p0DC ds t-add ress=192.168.0.0/24prefe rred-sourc e=192.168.0.254gat eway=0.0.0.0 ga teway-stat e=rea chabl e dis tance=0 in terfa ce=Lo cal 1 DCdst-a ddres s=10.0.0.0/24 p refer red-s ource=10.0.0.217 gat eway=0.0.0.0g atewa y-sta te=re achab le di stanc e=0 i nterf ace=P ublic[ad min@M ikroT ik] i p rou te> 显示这些路由, 这些 IP数据包到达目的地址10.0.0.0/24是通过 Pub lic 接口发送,然而IP数据包到达目的地址192.168.0.0/24是通过Local接口发送.然而,你需要指定数据包应该向那个路由器转发,那个目的地不同的网络直接连接到这台路由器上.添加缺省路由在以下这个缺省的路由器(desti natio n 0.0.0.0(any), net mask0.0.0.0 (a ny))将要添加.在这种情况下它是ISP\'s 网关10.0.0.1,通过这个Publi c 接口到达.[admin@Mikr oTik] ip r oute> addgatew ay=10.0.0.1[a dmin@Mikro Tik]ip ro ute>printFla gs: X - di sable d, I- inv alid, D -dynam ic, J - re jecte d,C - co nnect, S - stat ic, R - ri p, O- osp f, B- bgp# D ST-AD DRESS G GA TEWAY DIST ANCEINTER FACE0 S0.0.0.0/0r 10.0.0.1 1 Pu blic1 DC 192.168.0.0/24 r 0.0.0.0 0 Lo cal 2 DC10.0.0.0/24 r 0.0.0.0 0 P ublic[ad min@M ikroT ik] i p rou te> 在这,这个缺省的路由列表是#0. 像我们看到的,这个网关 10.0.0.1可以通过这个\'P ublic\' 接口到达.如果这个网关指定是不正确的,这个值在这个参数\'i nterf ace\'是不知的.注意你不能添加两条路由到相同的目的地,目的地----地址/网路掩码!它试用于缺省的路由.代替,对于目的地你可以键入多条网关.至于更多的信息请在I P 路由中,请阅读 Rou tes,Equal cost Mult ipath Rout ing,Polic y Rou ting手册. 如果你偶然的添加了不必要的静态路由, 使用这个r emove命令删除一条不必要的路由.你不能删除动态的(D C) 路由.他们被自动的添加并描绘出路由器直接连接到这个网络中.测试这个网路连接从现在开始, 这个 /pin g 命令可以在两者的端口测试网路的连通性.在这个路由器连接的网络中你可以到达任一台主机./p ing 命令工作的方式:[admin@Mikr oTik] ip r oute> /pin g 10.0.0.410.0.0.4 64 b yte p ing:ttl=255 ti me=7ms10.0.0.4 64 byte ping: ttl=255time=5 ms10.0.0.464 by te pi ng: t tl=255 tim e=5 m s3packe ts tr ansmi tted, 3 pa ckets rece ived, 0% p acket lossrou nd-tr ip mi n/avg/max= 5/5.6/7ms[admin@Mikr oTik] ip r oute>[ad min@M ikroT ik] i p rou te> /ping192.168.0.1192.168.0.164 by te pi ng: t tl=255 tim e=1 m s192.168.0.164 by te pi ng: t tl=255 tim e=1 m s192.168.0.164 by te pi ng: t tl=255 tim e=1 m s3packe ts tr ansmi tted, 3 pa ckets rece ived, 0% p acket lossrou nd-tr ip mi n/avg/max= 1/1.0/1ms[admin@Mikr oTik] ip r oute>这台工作站和膝上型电脑能够达到 (p ing)在本地地址192.168.0.254的路由器, 如果这路由器的地址192.168.0.254是当作缺省网关必须在这台工作站和膝上型电脑的T CP/IP配置中指定.当你ping这台路由器:C:\\>pi ng 192.168.0.254Re ply f rom 192.168.0.254: b ytes=32 ti me=10ms TT L=253Rep ly fr om 192.168.0.254: by tes=32 tim eping 10.0.0.217Re ply f rom 10.0.0.217: byte s=32time=10msTTL=253R eplyfrom10.0.0.217: byt es=32 time ping10.0.0.4 Reque st ti med o ut. Reque st ti med o ut. Reque st ti med o ut. 注意你不能够接入到远程的路由器 (n etwor k 10.0.0.0/24 a nd th e Int ernet),除非你作了下列各向项之一:?这使用M ikroT ik 路由器把你的你私人的LA N 192.168.0.0/24 (看下面的说明)\'hi de\'翻译 (冒充)成源网络地址, 或在ISP\'s 网关10.0.0.1添加静态的路由, 那指定的网咯主机 192.168.0.0/24的网关是 10.0.0.217.然后ISP上所有上的主机,包括服务器, 都能于这个L AN中的主机连通.为要建立路由,它必须要求你懂得更多的T CP/IP网路配置知识.如果你在配置你的网路计划中有困难,这ht tp://www.p rivat e.org.il/t cpip_rl.ht ml.有广泛的IP资源内容是由Ur i Raz编译的.我们强烈的支持您获得更多的知识,.高级的配置作业描述下一个我们讨论的情形是用ISP给定的一个地址10.0.0.217.\'hi ding\' 私人LAN 192.168.0.0/24 \'behi nd\'.应用实例 wi th Ma squer ading如果你想用 IS P给定的一个地址10.0.0.217.\'hidi ng\'私人 LA N 192.168.0.0/24\'b ehind\' ,你应该使用Mikr oTik路由器的源网路地址翻译(masq uerad ing)特点. 如果你访问ISP的网络和Int ernet时在ISP的网络中出现的所有的请求都是来自主机10.0.0.217,冒充是有用的.当数据包通过网路192.168.0.0/24 到这个地址的10.0.0.217路由器时,这个冒充将改变这个数据包的源 IP 地址和端口.伪装转换要求的全球的IP地址的数字并且它让整个的网路使用一个单个的I P地址连接到世界的网路.为了使用冒充,和激活\'masq uerad e\'都必须添加一条源 NAT规则到防火墙. 配置: [admi n@Mik roTik] ipfirew all s rc-na t> ad d act ion=m asque radeout-i nterf ace=P ublic [ad min@M ikroT ik] i p fir ewall src-nat>printFla gs: X - di sable d, I- inv alid, D -dynam ic0 out-inter face=Publi c act ion=m asque radesrc-a ddres s=192.168.0.0/24[a dmin@Mikro Tik]ip fi rewal l src-nat>注意在使用冒充时更多的说明请参考 Netw ork A ddres s Tra nslat ion.带宽管理实例假如你想限制在LAN中所有的主机的带宽下载时128kb ps上传是64kbp s带宽限制是在你的流量控制中稳妥的使用于输出接口队列.它可以添加一条充足得队列到你的Mikr oTik路由器. [admi n@Mik roTik] que ue si mple> addmax-l imit=64000/128000 in terfa ce=Lo cal [admi n@Mik roTik] que ue si mple> prin tFl ags:X - d isabl ed, I - in valid, D - dyna mic 0 nam e="qu eue1" targ et-ad dress=0.0.0.0/0 dst-addre ss=0.0.0.0/0i nterf ace=L ocalqueue=defa ult p riori ty=8limit-at=0/0m ax-li mit=64000/128000[a dmin@Mikro Tik]queue simp le> 作为整体由缺省值的其他的另外参数.限制时到本地网的值近似128kbps(下载)和到达客户机的本地网64kbps(上传).NAT的应用实例假如,我们移动我们的服务器在我们私人的实例从公用的网路到我们当地的网路:这个服务器的地址是192.168.0.4,并且我们运行we b服务器它监听这个T CP的80端口我们需要获得一个可以可到达的访问Inter net的地址和端口10.0.0.217:80. 在Mikr oTik的路由器中他可以通过这种方法实现网路地址的翻译(NA T).这个Publi c 的地址10.0.0.217:80能够翻译成L ocal地址192.168.0.4:80任何目的N AT 规则都要求翻译成这个目标地址和端口:[a dmin@Mikro Tik]ip fi rewal l dst-nat> addactio n=nat prot ocol=tcp \\ds t-add ress=10.0.0.217/32:80 to-dst-a ddres s=192.168.0.4 [admi n@Mik roTik] ipfirew all d st-na t> pr int Flags: X - disa bled, I -inval id, D - dy namic0 d st-ad dress=10.0.0.217/32:80 pr otoco l=tcp acti on=na tto-dst-addre ss=192.168.0.4[adm in@Mi kroTi k] ip fire walldst-n at>。
winbox备份还原

ROS功能非常强大,因此被越来越多的人们使用,但是有时我们会遇到,主机瘫痪,无法重启的时候,会影响网络的使用,那么下面就给大家讲下,遇到这种情况,如何做好备份,备份后又如何还原
工具/原料
∙ROS服务器一台
∙电子盘一个
步骤/方法
1.首先我们先通过winbox登录到ROS服务器中,下图是登录界面
2.通过winbox登录以后,一般ROS会有很多的功能菜单选项,我们在右侧菜单栏中找
到Files这个菜单选项
3.然后点击Files这个文件,这时会在右侧显示一个窗口,窗口中简单的有两个英文
说明,一个是backup意思是备份,一个是restore意思是还原
4.备份其实很简单,就是点击下backup,这时就会在下方空白处出现一个文件包,这
个文件包就是我们的ROS数据备份了。
如图:
5.然后我们用鼠标点击这个备份好的文件包,不要松开鼠标,直接把它拖到你的电脑
桌面,这样一个ROS的数据备份就做完了。
6.还原其实也很简单,当你把一个新的电子盘安装好,通过winbox登录到ROS服务器
界面以后,同样进入Flies这个菜单下,然后点击Restore这一项
7.这个ROS系统会提示重启,直接点击确认,等ROS重启完毕,数据也就全部还原了,
这就是备份和还原的操作方法,是不是很简单。
ros软路由实用技术ros软路由adsl双线 pppoe服务器设置(图文讲解)
ros软路由ADSL双线+PPPOE服务器设置详细图文教程减小字体增大字体一、先说下这几天泡论坛发现在自己以前及其错误的地方登录winbox 初始化ros以前都是把显示器键盘接到ros上,配置lan网卡地址后再将显示器键盘接到电脑上,把电脑本地连接配ros网段,连接winbox,等测试自动获取ip时又将本地连接设为自动获取。
需要回复ros为初始时,又重复上面的过程泡坛才知道,winbox可以用ros lan网卡的mac地址登录,不必管本地连接的ip的。
初始化时在winbox里使用new terminal就可以初始化了,初始了后用mac登录winbox就可以配置了。
总结:把ros的电脑先设BIOS设为来电自动开机,忽略一切错误开机,就可以再也不接键盘和显示器了。
二、配置ros 双ADSl负载均衡走的弯路因为夹杂了pppoe服务,一直配不通,用脚本生成器生成的也不通,看很多教程,互相影响,自己最后也不知道在配什么了。
总结:先一步一步配,看到哪一步不通。
不如1、先配好lan,看winbox能否登陆winbox2、配置双线adsl,看2条adsl是否拨号成功,双线adsl脚本配置后,在ip里是不应该出现58类ip的,因为之前不理解自动刷新网关,看到脚本里58类ip,自己的机子里没有,以为不正常,重复添加脚本。
(增加pppoe服务后,拨号用户不通,这个后面详解)3、客户机配置手动ip和dns,看能否上网。
3、增加pppoe服务,导入pppoe账号,可以用脚本生成器生成。
三:配置双线adsl+pppoe服务过程1、安装ros,这个这里省略。
2、配置lan ip3、电脑配ip,和ros一个网段,winbox登陆,获取到lan的MAC,把ip换为mac登陆。
方法是ip登陆后点下后面小□(里面有三个...的那个,connect左边那个)在打开的菜单里点mac就可以换了。
4、改网卡名字我把第一个改为wan1,第二个改为wan2,第三个改为lan。
rostopic echo 用法 -回复
rostopic echo 用法-回复rostopic echo 用法:一个ROS命令行工具,用于监听和显示ROS系统中特定主题的消息。
它可以让开发人员实时查看和分析ROS节点之间传输的消息数据,以帮助调试和故障排除。
在本文中,我们将一步一步地介绍rostopic echo的用法,并深入探讨其功能和用途。
第一步:安装ROS和rostopic首先,您需要安装ROS(机器人操作系统)以及其相关工具包。
ROS有许多版本,本文将基于ROS Melodic进行介绍。
在安装完ROS后,您将拥有rostopic命令行工具。
第二步:了解ROS主题在深入研究rostopic echo之前,让我们先了解一下ROS主题。
ROS 中的主题是一种消息传递机制,通过它可以在不同的ROS节点之间进行通信。
节点可以发布(发布者)和订阅(订阅者)特定主题的消息。
发布者可以向主题发布消息,而订阅者则可以从主题接收消息。
第三步:查看可用主题使用以下命令可以查看当前ROS系统中所有可用的主题:rostopic list这将显示一个主题列表,每个主题都以斜杠“/”开头,并根据其名称进行分类。
rostopic list命令将显示主题名称、类型以及与之相关的ROS 节点信息。
第四步:使用rostopic echo现在让我们使用rostopic echo命令来监听和显示特定ROS主题的消息。
语法如下:rostopic echo [topic_name]以下是rostopic echo的一些常见用法:1. 监听并显示特定主题的最新消息:rostopic echo /topic_name2. 显示消息的完整内容:rostopic echo -p /topic_name3. 仅显示消息的某些字段:rostopic echo /topic_name.field_name4. 使用正则表达式匹配主题:rostopic echo /topic_name_pattern此外,还可以通过添加参数来自定义输出格式:-一次显示多个主题:rostopic echo /topic1 /topic2 ...-以详情方式显示消息:rostopic echo verbose /topic_name-显示时间戳:rostopic echo nostr /topic_name-将输入以十六进制格式显示:rostopic echo hex /topic_name-显示有效性校验和错误信息:rostopic echo validate /topic_name-使用特定的数据查看器来解析和显示消息:rostopic echo acType sensor_msgs/Imu /topic_name-忽略长度超出一定数量的长字符串:rostopic echo filter 100 /topic_name第五步:使用示例让我们通过一个简单的示例来演示rostopic echo的用法。
ROS常用命令翻译

/sy reset 恢复路由原始状态/sy reboot 重启路由/sy showdown 关机/sy ide set name=机器名设置机器名/export 查看配置/ip export 查看IP配置/sy backup 回车save name=你要设置文件名备份路由LOAD NAME=你要设置文件名恢复备份/interface print 查看网卡状态0 X ether1 ether 1500 这个是网卡没有开启0 R ether1 ether 1500 这个是正常状态/int en 0 激活0网卡/int di 0 禁掉0网卡/ip fir con print 查看当前所有网络边接/ip service set www port=81 改变www服务端口为81 /ip hotspot user add name=user1 password=1 增加用户Certificate----------证书管理Driver---------------设备管理File------------------当地路由器文件的存储interface ------------接口配置log ------------------系统记录password ------------改变密码ping ----------------发送,回送ICMP数据包port -----------------串行端口quit ----------------退出控制radius---------------Radius客户机设置redo------------------- Redo previosly undone actionsetup ----------------基本的系统设置snmp -----------------SNMP 设置special-login-----------专用的登陆用户undo----------------- 取先前的效果user-------------------用户管理ip--------------------- IP 选项queue ----------------------带宽管理system------------------- 系统信息和有效的程序tool----------------------- 诊断工具export --------------------显示或保存导出的脚本那是用来恢复的配置[admin@MikroTik] >[admin@MikroTik] ip>accounting ------------------------交通统计address ---------------------------地址管理arp ---------------------------ARP 进入管理dns ------------------------DNS 设置firewall ------------------防火墙管理neighbor ---------------------邻居packing ---------------------数据打包设定pool -------------------------IP地址池route----------------------- 路由管理service ---------------------IP 服务policy-routing ----------------路由政策upnp ------------------------- Universal 即插即用vrrp------------------------虚拟路由沉余协议socks ----------------------SOCKS 版本4代理hotspot-------------------- HotSpot 管理ipsec ------------------IP安全web-proxy -----------------HTTP 代理export------------------------显示或保存导出的脚本那是用来interfaces---网络接口wireless---无线网络bridge---桥接ppp-虚拟拨号ports--端口queues-限速drivers-设备systemfiles-文件备份/恢复log--系统日志snmp-snmp管理方式users-用户radius-radius管理tools-工具new terminal-命令方式telnet--tlenet连接方式password--修改密码certificate---证书哎,盗版madk supout.rif 制作rif文件manual--说明isdn chanels--一线通方式routing--路由exit--退出ip addr add addr=192.168.1.1/24 interface=ether1ip addr add addr=58.213.126.58/30 interface=ether2ip route add gateway=58.213.126.57外网ip firewall nat add chain=srcnat src-address=192.168.1.0/24 action=masquerade222.190.124.46218。
备份和升级ROS

备份和升级ROS1.基于Web(GUI)方式的备份与升级 (2)1.1 Web方式下备份ROS (2)1.2 Web方式下升级ROS (2)2.基于命令行(CLI)方式的备份与升级 (2)2.1 备份ROS (2)2.1.1 如何成功连接PC与设备 (2)2.1.2 TFTP服务器的设置 (3)2.1.3 备份ROS的具体操作 (3)2.2 升级ROS (6)2.2.1 在monitor模式下升级ROS (6)2.2.2 在“Router#”管理模式下升级ROS (7)1.基于Web(GUI)方式的备份与升级博达的宽带路由器和防火墙等设备都是支持Web管理的,通过Web图形化的管理界面可轻松方便的实现对ROS的备份与升级。
1.1 Web方式下备份ROS在IE浏览器地址栏输入设备的管理地址,输入用户名和密码,(默认管理地址为192.168.2.1,登录的用户名和密码都为:admin)登录设备的Web管理界面,点击在左边的选项栏“系统管理->软件升级”如下图:图1.1 软件升级的Web界面要备份ROS,只要点击图1.1中的“备份IOS软件”,然后将其保存到本地即可。
1.2 Web方式下升级ROS同样在图1.1中点击“浏览”,在本地找到要升级的IOS文件(以.bin结尾的文件),然后点击“升级”就可以完成升级。
2.基于命令行(CLI)方式的备份与升级2.1 备份ROS2.1.1 如何成功连接PC与设备用网线将你的PC与设备连接起来,将PC的IP地址与设备接口的IP地址设置为同一网段,例如设备接口的IP地址为:192.168.2.1,子网掩码为:255.255.255.0,则可将PC的IP地址设置为:192.168.2.2,子网掩码为:255.255.255.0,设置完成后从PC上PING设备接口的IP地址,确保能够PING通。
2.1.2 TFTP服务器的设置在本地D盘根目录下新建一个名为ROS的文件夹,上网下载一个名为“tftpd32.exe”的TFTP软件(大小只有200KB左右),运行该软件并做如下的设置:图1.2 TFTP服务器端的设置2.1.3 备份ROS的具体操作一般可以通过telnet方式或者CONSOLE口来登录设备。
关于利用RouterOS的VRRP来配置路由器热备份(互联网+)

关于利用RouterOS的VRRP来配置路由器热备份有时候为了保证我们网络的稳定性和可靠性,可能会申请两条出口链路或用一条出口链路接防火墙后接两台RouterOS做热备份路由,当主路由器(ROS A)功能出现故障时, VRRP(虚拟路由器冗余协议, RFC2338)由另外一个路由器(ROS B)来接管相应的工作。
通过设置虚拟路由器为缺省路由器,用户在路由器发生故障时可以继续通信。
如图所示的配置, 利用同一个以太网中的两台路由器设置一台虚拟路由器。
在实际运行中, 两台路由器中的任一台成为主路由器, 该主路由器模拟虚拟路由器。
备份路由器监控主由器状态。
一旦主路由器出现故障影响网络运行, 备份路由器立即进入主路由器状态以模拟虚拟路由器。
IP地址被分配给虚拟路由器。
指定虚拟路由器IP地址为缺省路由器的服务器将不会觉察主路由器的切换而继续进行正常通信。
利用RouterOS的VRRP设置如下:下面这个例子展示如何配置图中所示两个路由器之上的VRRP。
路由器一定有初始配置:接口(LAN)配置为有效,主及备份路由器接口(LAN)有适当的IP地址(注意两个路由器接口中的任意一个都应该有一个IP地址),路由表被正确设置(它至少应该有一个默认路由)。
SRC-NAT也应该在之前正确配置。
我们假设接口(LAN)10.10.10.0/24网络连接到局部的所有的VRRP主和备份路由器上。
我们要设置好主VRRP路由器的LAN口IP为10.10.10.1/24及设置好备份VRRP备份路由器的LAN口IP为10.10.10.2/24完成以上设置后,测试主或备份RouterOS的路由器的LAN口网关都可以上网。
下面我们将要配置由VRRP模拟虚拟路由器生成网关为10.10.10.3/24给客户机或三层交换机连接及上网第一,配置Master VRRP路由器(主路由器)首先,我们应该在这个路由器上创建一个VRRP路由,假设这个路由器的优先级是255,因为它应该是首选的路由器注:优先级(整数:0..255;默认:100)-当前节点的优先级(值越大表示优先级越高)255-RFC要求拥有赋值IP地址给主路由器的优先级是255下面的interval(即是时间间隔的意思)(整数:0..255;默认:1)-VRRP每秒更新时间间隔。
ROS安装及配置教程2
ROS安装方法及设置教程ROS的配置要求CPU和主板–核心频率在100MHz或更高的单核心X86处理器,以及与兼容的主板。
RAM –最小32 MiB, 最大1 GB; 推荐64 MB或更高。
ROM –标准ATA/IDE接口〔SCSI和USB控制器不支持;RAID控制器驱动不支持;SATA不完全支持〕最小需要64 Mb空间;Flash和一些微型驱动器使用ATA接口能连接使用。
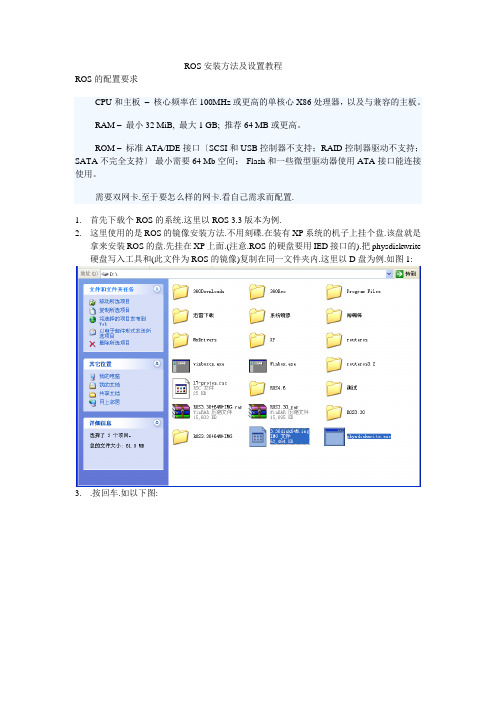
需要双网卡.至于要怎么样的网卡.看自己需求而配置.1.首先下载个ROS的系统.这里以ROS 3.3版本为例.2.这里使用的是ROS的镜像安装方法.不用刻碟.在装有XP系统的机子上挂个盘.该盘就是拿来安装ROS的盘.先挂在XP上面.(注意.ROS的硬盘要用IED接口的).把physdiskwrite 硬盘写入工具和(此文件为ROS的镜像)复制在同一文件夹内.这里以D盘为例.如图1:3..按回车.如以下图:4..接着会问你是否确定.输入y.然后会把镜像写入硬盘.写入完了手动重启即可.如以下图.5.开机之后.会重启几次.当提示输入用户名和密码的时候输入admin.密码为空.直接回车进去.第一次进入程序会自动进展破解.破解完会自动重启(这里下载的这个镜像会自动破解的.如果是另外下载的.请参考他给予的破解方法进展破解).当第二次进入的时候就可以使用了.输入用户名和密码进入就可以使用ROS了.安装到这就完毕了.接下来进展配置. physdiskwrite和这2个工具放到C盘进展安装.)6.配置网卡方法.进入ROS后.输入/int(简写即可)-pri进展查看网卡信息.如以下图:Lan网卡是内网.wan网卡是外网.这些名字是自己改的.初始的名字是ether1和ether2.Lan和wan前面的R表示网卡以激活.为X的话表示未激活.7.输入命令;/ip add进展配置网卡.然后输入add adderss=这里是内网的IP.这里设置为192.168.0.1/24.24表示子网掩码.然后是要修改的网卡名字.完整的命令是如以下图:这里就配置好网卡了.然后在浏览器输入192.168.0.1,这里是路由的IP.点击右边的winbox把winbox下载下来.然后在winbox输入IP.用户名是admin.密码为空.如图.点击链接.进入路由的控制界面.如图:8.进展配置路由.点击如以下图:点击IP-Address设置第二块网卡的IP也就是外网IP比方我的是假设外网IP是:假设外网掩码是:255.255.255.0就这样设Address:Network:Broadcast:Interface:这里选择外网的网卡.我的是wan如以下图:9.增加静态路由再次点去Ip-Route设置路由表.很简单点击+号Destination这个如果用.0/0就表示路由所有ip段其他不懂就不要设了.Gateway:这里就是设网关的输入你的外网网关比方我的外网网关为192.168.1.1.如以下图:10.设置DNS.在IP-DNS这里设置.进入后点击settings设置DNS如以下图:完了点击OK11.设置NAT共享上网点击IP-Firewall设置共享上网选Nat点+选第一项GeneralChain:srcnat选第四项Action设置Action:masquerade这样设置就可以共享上网了.到这就能上网了.接下来就是设置DHCP这些了.12.进入WINBOX后选IP POOL在这里添加地址池,NAME设置为DHCP,ADDRESSES设置192.168.0.*-192.168.0.*这里设置你要分给下面机器的IP段.后进入IP-DHCPSERVER设置网关和DNSNAME=DHCP,INTERFACE=LAN ,lease-time=3d,ADDRESS POOL=DHCP,其他默认~ 如图:在设置ip->dhcp-server->network,address=192.168.0.0/24,gateway=192.168.0.1,netmask=24\dns-server=192.168.0.1?根据ISP给你的DNS来设置如以下图:到这DHCP就设置完成了.接下来设置绑定MAC地址.未绑定的机子不给上网.13.应用要求:将IP与MAC地址绑定,制止改IP与改MAC地址者上网。
ROS配置的导出导入、系统的备份恢复

(二).命令法:
1.系统备份命令backup save
/ system backup save name=xxx
2.恢复系统命令backup load
/ system backup load name=xxx
一. 使用export命令导出,使用import命令导入。
1.export导出命令
导出全部配置命令:
export file=xxx 或 /export file=xxx 或简写 ex fi=xxx
导出防火墙命令:
ip firewall export file=fw 或简写 ip fi ex fi=fw
***注意问题:1)导出文件类型默认为 .rsc,可用记事本编辑
2)导出命令文件名不能包含类型名,否则提示文件名无效。
3)fi=fw 中的fw是作者标识防火墙文件,也可用其他文件名
2.improt导入命令
导入配置命令:/import xxx.rsc 或 im xxx.rsc
***注意问题:1)存储在ROS之外的xxx.rsc,可通过winbox与window的之间的拖曳(拖拽)实现复制和粘贴
2)这个命令中文件名必须打上类型名.rsc
二、备ห้องสมุดไป่ตู้/恢复整个ROS系统
(一).菜单按钮法:
1.备份:在Files菜单的File list窗口中点Backup按钮
手把手教你安装Ros破解版2.9.27(图解).doc
由于网吧或则小型企业选择Ros做软路由的比较多!今天我就先发一帖讲述关于安装Ros的。
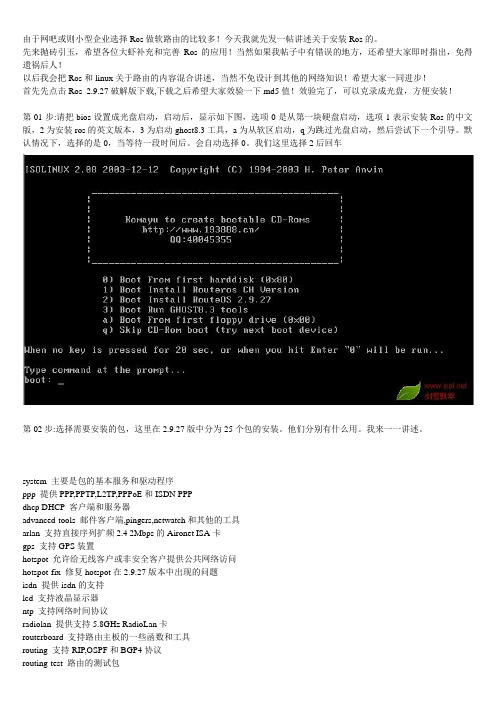
先来抛砖引玉,希望各位大虾补充和完善Ros的应用!当然如果我帖子中有错误的地方,还希望大家即时指出,免得遗祸后人!以后我会把Ros和linux关于路由的内容混合讲述,当然不免设计到其他的网络知识!希望大家一同进步!首先先点击Ros_2.9.27破解版下载,下载之后希望大家效验一下md5值!效验完了,可以克录成光盘,方便安装!第01步:请把bios设置成光盘启动,启动后,显示如下图,选项0是从第一块硬盘启动,选项1表示安装Ros的中文版,2为安装ros的英文版本,3为启动ghost8.3工具,a为从软区启动,q为跳过光盘启动,然后尝试下一个引导。
默认情况下,选择的是0,当等待一段时间后。
会自动选择0。
我们这里选择2后回车第02步:选择需要安装的包,这里在2.9.27版中分为25个包的安装。
他们分别有什么用。
我来一一讲述。
system 主要是包的基本服务和驱动程序ppp 提供PPP,PPTP,L2TP,PPPoE和ISDN PPPdhcp DHCP 客户端和服务器advanced-tools 邮件客户端,pingers,netwatch和其他的工具arlan 支持直接序列扩频2.4 2Mbps的Aironet ISA卡gps 支持GPS装置hotspot 允许给无线客户或非安全客户提供公共网络访问hotspot-fix 修复hotspot在2.9.27版本中出现的问题isdn 提供isdn的支持lcd 支持液晶显示器ntp 支持网络时间协议radiolan 提供支持5.8GHz RadioLan卡routerboard 支持路由主板的一些函数和工具routing 支持RIP,OSPF和BGP4协议routing-test 路由的测试包rstp-bridge-test 快速生成树协议桥的测试包security 支持IPSEC,SSH和安全的WinBox连接synchronous 支持Framerelay和Moxa C101,Moxa C502,Farsync,Cyclades PC300,LMC SBE和XPeed同步卡telephony IP电话的支持ups 智能模式下的APC UPS支持user-manager 用户管理服务web-proxy HTTP web代理支持webproxy-test HTTP web代理支持测试包wireless 提供支持Cisco的Aironet卡,prismii和Atheros的无线站和接入点(测试版)wireless-legacy 提供支持Cisco的Aironet卡,prismii和Atheros的无线站和接入点system:默认的system安装包含了01.IP地址管理,ARP协议,静态路由,策略路由,放火墙(包过滤,内容过滤,伪装,和静态的NAT),流量整形(队列方式),ip流量监控,Ros的邻居发现,ip数据包的包装,DNS客户端设置,IP服务(服务器)02.以太网接口的支持03.IP over IP隧道接口的支持04.以太网over IP隧道接口的支持05.管理以太网ISA卡06.串口的管理07.本地用户管理08.导入和导出路由器的配置脚本09.备份和恢复路由器的配置10.撤消和重置配置的改变11.网络诊断工具(比如ping,tracert,带宽测试,线路监控)12.桥接的支持13.系统资源包管理14.软件包管理15.telnet客户端和服务器的支持16.本地和远程的日志记录17.winbox服务器以及winbox可执行的一些插件其他的包详细说明因为包含的范围和领域太广,如果想详细了解,请浏览[url]http://wirelessconnect.eu/index.php?option=com_content&task=blogsection&id=0&Itemid=627&limit=22&limitstart=0[/u rl]和[url]/testdocs/ros/2.9/guide/packages.php[/url]由于很多地方网吧或企业的是使用的PPPoe方式的,所以我这里安装system和ppp还有advanced-tools.其他的安装包会在以后详细介绍功能时,提醒大家安装。
ROS安装及配置(图解)步骤

ROS2.9.7安装配置上网步骤制作人:郭成玉1、准备工作:主板:845以上、硬盘:1G—80G并口、CPU:2.0G、内存:256M、网卡:(Inter82559、8139.INTEL82540)、显卡:主板自带、光盘一张、光驱!2、光驱启动到如图:一般选择者几项(按a全选、按空格选中一项)按i开始安装。
3、安装提示:是否保留以前的设置(按N不保留,按Y保留)一般不保留按N4、安装提示:是否格式化硬盘选Y是。
5、出现格式化过程,格式化完后按Enter从起电脑6、启动电脑到后如果你下载的ROS不是破解版的还需按C破解,如果已经破解的直接用硬盘启动到ros的登录界面7、用户名:admin(回车),密码:空(直接回车)是否查看ros相关信息,全洋文看不懂按N回车8、进入ros的最初配置这里输入/int pri查看已经安装的网卡信息9、出现网卡信息,这儿只有一张网卡,R表示网卡已经激活了,如果是X那还需激活网卡:命令Int回车输入enable 0 表示第一张网卡10、我们看到ether1如果是两张或者是三张等等,那么ether2、ether3。
我们把网卡的名字改一下便于后好操作。
改名网卡:int set 0(表示第一张网卡) name=dianxin(也可以WAN表示外网)、如果还有网通的就命名为:int set 1 name=wangtong、第三张就命名为内网:set 2 name=LAN网卡命名完成!!11、接下来配内网和外网的IP命令:ip address add address 192.168.XXX.XXX/24 interface=lan回车ip address add address 58.42.XXX.XXX(通行部门给你的IP)/子网掩码interface=dianxin(WAN)12、查看配置信息命令:ip add pri查看IP地址配置信息!13、找局域网内的某一天电脑浏览器上输入http://192.168.XXX.XXX后下载一个Winb ox登陆器14、登陆路由WebConnet Tok:输入192.168.XXX.XXX, Login:输入原始账号:admin、Password密码为:空点击Connect登陆路由器15、进入路由Web的第一个界面。
ROS基本操作说明
RouterOS应用说明主要特征TCP/IP协议组:∙Firewall和NAT–包状态过滤;P2P协议过滤;源和目标NAT;对源MAC、IP地址、端口、IP协议、协议(ICMP、TCP、MSS等)、接口、对内部的数据包和连接作标记、ToS 字节、内容过滤、顺序优先与数据频繁和时间控制、包长度控制...∙路由–静态路由;多线路平衡路由;基于策略的路由(在防火墙中分类); RIP v1 / v2, OSPF v2, BGP v4∙数据流控制–能对每个IP、协议、子网、端口、防火墙标记做流量控制;支持PCQ, RED, SFQ, FIFO 对列; Peer-to-Peer协议限制∙HotSpot– HotSpot认证网关支持RADIUS验证和记录;用户可用即插即用访问网络;流量控制功能;具备防火墙功能;实时信息状态显示;自定义HTML登录页;支持iPass;支持SSL安全验证;支持广告功能。
∙点对点隧道协议–支持PPTP, PPPoE和L2TP访问控制和客户端;支持PAP, CHAP, MSCHAPv1和MSCHAPv2 验证协议;支持RADIUS验证和记录;MPPE加密;PPPoE压缩;数据流控制;具备防火墙功能;支持PPPoE按需拨号。
∙简单隧道– IPIP隧道、EoIP隧道(Ethernet over IP)∙IPsec–支持IP安全加密AH和ESP协议;∙Proxy–支持FTP和HTTP缓存服务器;支持HTTPS代理;支持透明代理;支持SOCKS协议;DNS static entries; 支持独立的缓存驱动器;访问控制列表;支持父系代理。
∙DHCP– DHCP服务器;DHCP接力;DHCP客户端; 多DHCP网络;静态和动态DHCP租约;支持RADIUS。
∙VRRP–高效率的VRRP协议(虚拟路由冗余协议)∙UPnP–支持即插即用∙NTP–网络对时协议服务器和客户端;同步GPS系统∙Monitoring/Accounting– IP传输日志记录;防火墙活动记录;静态HTTP图形资源管理。
ROS设置PPPOE拔号上网

add name="dis_overdue" on-event="/ppp secret disable [find comment=[/system clock get date]]"
interval=1d
ROS会每天检查一次PPPOE账号有没有过期
详细请参考:/blog/static/748047792009101974735698
以下介绍通过ROS软路由设置PPPoE服务器
1. 创建 ip 地址池并加入路由
(1)点击主菜单上的 ip-pool, 选中 pools 选项卡,点击+号,在 name 中输入如:pppoe-server-pools,addresses 中输入:10.10.10.1-10.10.10.254,点击 OK。
4. 创建 PPPoE server
回到 ppp-intetfaces 选项卡,点击中间的 PPPoE Server,在 PPPoE Server List 对话框中点击+号,在 service name 中输入服务名称如:pppoe-service,在interface 选项中选中内网网卡,我这里选 eth1,在 default profile 中选第二步建立的 pppoe-profile 文件,并勾选下面的 one session per host 项(一台机器一个会话);点击 OK。
注意一点General里 Interface改为WAN
3. 设置NAT共享上网: ip --》firewall -source nat ,选择 + 号,选择action,action里面选择 masquerade ,其余选择默认即可
机器人操作系统浅析

机器人操作系统浅析随着科技的快速发展,机器人已经渗透到我们生活的各个领域,从工业生产到家庭服务,从医疗护理到探索未知的宇宙。
然而,要使这些机器人真正实现其潜力,我们需要一个强大的操作系统,就像我们在个人计算机上所依赖的Windows或MacOS一样。
本文将对机器人操作系统进行浅析。
一、机器人操作系统的定义与功能机器人操作系统是一种为机器人提供统一接口和功能的软件平台。
它允许开发者通过编程语言和工具对机器人进行控制和操作。
同时,操作系统也能管理和调度机器人的各种资源,包括硬件资源、软件资源和数据资源,以提高机器人的性能和效率。
二、主流机器人操作系统及特点目前市场上主流的机器人操作系统包括ROS(Robot Operating System)、YARP和ROS2等。
1、ROS:ROS是开源的机器人操作系统,被广泛应用于研究和开发中。
它提供了丰富的功能库和工具,帮助开发者快速构建机器人应用程序。
ROS具有良好的可扩展性,但也需要较高的技术门槛。
2、YARP:YARP是一个强大的机器人操作系统,它以高效、稳定和灵活而闻名。
YARP具有丰富的库和工具,适用于各种类型的机器人。
YARP还提供了强大的仿真和可视化工具,帮助开发者在开发过程中进行测试和调试。
3、ROS2:ROS2是ROS的升级版,它提供了更安全、可靠和灵活的接口。
ROS2支持现代编程语言,如Python和C++,并具有更好的性能和可扩展性。
三、未来发展趋势随着机器人在更多领域的广泛应用,未来的机器人操作系统将朝着更高效、更安全、更智能的方向发展。
同时,随着云计算、物联网和人工智能等技术的发展,未来的机器人操作系统将更加依赖于这些技术来实现更强大的功能。
例如,通过云计算和物联网技术,我们可以实现全球范围内的机器人协作和远程控制;通过人工智能技术,我们可以实现机器人的自主决策和学习能力。
四、结语机器人操作系统是实现机器人广泛应用的关键因素之一。
通过对主流机器人操作系统的了解和分析,我们可以看到未来发展趋势和方向。
rosbag 用法 -回复
rosbag 用法-回复rosbag 用法指的是在ROS(Robot Operating System)中使用rosbag 工具记录和回放消息数据的方法。
rosbag是ROS提供的一种工具,允许用户在ROS系统中记录和播放传感器和其他ROS消息的数据。
它非常有用,可以帮助开发人员调试和分析机器人系统的行为,以及复现实验结果。
本文将详细介绍rosbag的用法,从安装到使用的一步一步回答。
首先,我们需要确保已正确安装ROS。
ROS对于不同版本的操作系统可能有所不同,因此请在安装ROS之前,确保你的操作系统和ROS版本兼容。
可以在ROS官方网站(一旦ROS安装完成,我们就可以开始使用rosbag工具了。
rosbag工具是ROS的一部分,因此在安装ROS时它已经自动安装了。
我们可以通过在终端中输入以下命令来验证是否正确安装了rosbag:rosbag version如果成功安装,终端将显示rosbag的版本号。
接下来,我们可以创建一个ROS工作空间,并在其中创建一个包来存储和跟踪我们的rosbag文件。
首先,我们需要创建一个ROS工作空间目录:mkdir -p ~/catkin_ws/srccd ~/catkin_ws/srccatkin_init_workspacecd ..catkin_make接下来,我们创建一个ROS包:cd ~/catkin_ws/srccatkin_create_pkg my_bag_package roscpp rospy在这个例子中,我们创建了一个名为my_bag_package的ROS包,其中包含了roscpp和rospy的依赖项。
你可以根据自己的需要添加其他的依赖项。
接下来,我们需要编写一个ROS节点,用于记录我们感兴趣的消息数据。
我们可以在src目录下创建一个cpp文件,例如record_bag.cpp:cpp#include <rosbag/bag.h>#include <rosbag/view.h>#include <ros/ros.h>int main(int argc, char argv){ros::init(argc, argv, "record_bag");ros::NodeHandle nh;rosbag::Bag bag;bag.open("data.bag", rosbag::bagmode::Write);ros::Time begin = ros::Time::now();记录你感兴趣的消息数据...ros::Time end = ros::Time::now();ros::Duration duration = end - begin;ROS_INFO_STREAM("Recorded " << duration.toSec() << " seconds of data.");bag.close();return 0;}在这个例子中,我们使用了rosbag的API来打开一个名为"data.bag"的rosbag文件,并记录了一段时间内的消息数据。
ros回调函数调用 -回复

ros回调函数调用-回复如何在ROS中调用回调函数?在ROS(机器人操作系统)中,回调函数是一种常用的编程模式,它允许我们在某个事件触发时执行特定的代码。
这种编程模式在ROS中非常重要,因为它能够实现节点间的消息传递和事件处理。
在本文中,我们将探讨如何在ROS中调用回调函数,并详细介绍相关的步骤和技术。
首先,让我们了解一下什么是回调函数。
回调函数是一种函数,它作为参数传递给其他函数,并在特定事件发生时被调用。
回调函数可以用于处理异步事件,例如用户输入、传感器数据更新或网络通信。
在ROS中,回调函数通常用于处理节点之间的消息传递和状态更新。
实现一个回调函数的第一步是定义函数的原型和参数。
在ROS中,回调函数通常定义为类的成员函数。
这是因为ROS的节点是基于C++的,而C++中的类提供了更好的封装和代码组织方式。
回调函数的原型通常包含一个消息参数和一个回调函数名。
例如,我们可以定义一个名为callback_func的回调函数,它接收一个名为msg的消息作为参数。
接下来,我们需要在ROS节点中注册回调函数。
在ROS中,节点是一个独立的进程,用于执行某个特定的任务。
要注册回调函数,我们需要创建一个节点对象,并将回调函数注册到适当的话题上。
话题是一种用于消息传递的ROS机制,它允许节点之间进行通信。
在注册回调函数之前,我们需要确保已经创建了一个ROS节点。
为了注册一个回调函数,我们需要使用ROS的NodeHandle对象。
NodeHandle是ROS提供的一种资源管理工具,用于管理节点的各种资源。
通过NodeHandle对象,我们可以创建话题、发布消息和订阅消息等。
为了注册一个回调函数,我们需要调用NodeHandle对象的subscribe()方法,并提供适当的参数。
这里的参数包括话题的名称、消息的类型和回调函数的名称。
例如,我们可以创建一个名为sub的订阅者对象,并将回调函数callback_func注册到话题“/my_topic”上。
ros防火墙如何备份
ros防火墙如何备份想备份下ros防火墙,该怎么样备份呢?下面由店铺给你做出详细的ros防火墙备份方法介绍!希望对你有帮助!ros防火墙备份方法一:使用Restore能恢复系统备份文件(*.backup)使用export命令导式备份用户同应该使用import命令导入用户另提醒:备份PPP用户备份另两目录 [/ip pool][/ppp profile],两搜索关系用户属性参数导入候先导入 ip poolppp profile 才导入用户数据ros防火墙备份方法二:用Winbox 登录,点左侧的New T erminal进到Ros的控制台,输入ip arp export file=mac回车一切搞定!! 你在Files就会看到你备份的arp列表文件mac.rsc了。
还原的时候也一样进Ros控制台输入import mac回车。
ros防火墙备份方法三:这个很简单的,你只需要把现在ROS里面PPPOE的策略备份出来就可能了.具体是:你进入winbox,在New Terminal里面输入命令/ppp secrets敲一下回车键,然后再输入命令export file=pppUsers再敲一下回车,现在PPPOE的用户已经备份好了。
你现在可以通过FTP访问ROS,输入用户名和密码之后可以看到FTP里面多一个pppUsers.rsc文件,你把这个文件复制出来。
你记事本打开,就可以看到配置ROS的代码。
如果你想备份其它的策略同样也是用这样方法。
相关阅读:防火墙使用技巧一、所有的防火墙文件规则必须更改。
尽管这种方法听起来很容易,但是由于防火墙没有内置的变动管理流程,因此文件更改对于许多企业来说都不是最佳的实践方法。
如果防火墙管理员因为突发情况或者一些其他形式的业务中断做出更改,那么他撞到枪口上的可能性就会比较大。
但是如果这种更改抵消了之前的协议更改,会导致宕机吗?这是一个相当高发的状况。
防火墙管理产品的中央控制台能全面可视所有的防火墙规则基础,因此团队的所有成员都必须达成共识,观察谁进行了何种更改。
RouterOS备份与复位
RouterOS备份与复位RouterOS备份、配置还原和复位如下:∙系统备份∙系统通过备份文件还原∙导出配置∙导入配置∙系统复位RouterOS可以通过backup将系统备份为二进制文件,采用FTP 访问或通过在winbox中的file中下载备份文件,并可以通过备份文件还原路由器设置。
RouterOS通过导出配置文件,可生成文本文件(可编辑脚本),同样使用FTP 或通过在winbox中的file中下载文件,导入配置则将脚本文本文件导入路由器。
系统复位是将所有的配置信息从RouterOS中全部删除掉,在做此操作前,最好先将路由器的配置备份一次。
注:为了保证备份不会失败,请在将备份的文件恢复到同样的软件版本和同样的硬件配置上去系统备份操纵路径:/system backupSave指令是保存当前配置到一个备份文件中,显示文件在/file目录中。
如需要回复指定的备份文件,可通过/system backup中的load指令载入配置,还原系统。
指令描述load name=[filename]–载入备份文件的配置save name=[filename]–保存当前的配置到文件中例如:将当前的配置保存到文件test:[admin@MikroTik] system backup> save name=testSaving system configurationConfiguration backup saved[admin@MikroTik] system backup>在路由器中查看保存的文件:[admin@MikroTik] > file print# NAME TYPE SIZE CREATION-TIME0 test.backup backup 12567aug/12/2002 21:07:50[admin@MikroTik] >导入备份文件test:[admin@MikroTik] system backup> load name=testRestore and reboot? [y/N]: y...Winbox下配置直接在files菜单下,通过backup和restore操作系统复位操作路径:/system> reset-configuration这个指令将会清除掉路由器的所有配置,包括登陆的账号和密码(恢复为“admin“和空密码)IP地址和其他配置将会被抹去,在reset指令执行后路由器将会重启。
CENTOS的备份和恢复

CENTOS的备份和恢复CENTOS的备份和恢复其实⾮常简单,我们只要把全部⽂件⽤TAR打包就⾏,下次需要恢复的适合再解压开覆盖就可以了下⾯详解CENTOS备份和还原的过程tar打包命令的特点:1、保留权限2、适合备份整个⽬录3、可以选择不同的压缩⽅式4、如果选择不压缩还能实现增量备份,部份还原,参考man tar因为Linux类系统不像windows,它不会限制ROOT⽤户存取任何东西,因此完全可以把⼀个分区上全部⽂件都存放⼊⼀个TAR⽂件中。
下⾯是备份过程⾸先使⽤ROOT权限登陆系统,然后执⾏cd /进⼊根⽬录然后执⾏下⾯的完整备份命令(建议新建⼀个screen来执⾏,防⽌⽹络中断):tar cvpzf backup.tgz / --exclude=/proc --exclude=/lost+found --exclude=/mnt --exclude=/sys --exclude=backup.tgz下⾯详解下这个命令:“tar”是⽤于打包⽂件的命令。
“cvpfz”是tar的选项,分别是“创建档案⽂件”、“保持权限”(保留所有东西原来的权限)、“使⽤gzip来减⼩⽂件尺⼨”。
“backup.gz”是我们作为备份⽂件的⽂件名。
“/”是我们要备份的⽬录,/代表的是整个⽂件系统。
在备份⽂件名“backup.gz”和要备份的⽬录名“/”之间给出了备份时必须排除在外的⽬录。
有些⽬录是⽆⽤的,例如“/proc”、“/lost+ found”、“/sys”。
当然“backup.gz”这个备份⽂件本⾝必须排除在外,不然就⽆限循环了。
另外如果不把“/mnt”排除在外,那么挂载在“/mnt”上的其它分区也会被备份。
另外需要确认⼀下“/media”上没有挂载任何东西(例如光盘、移动硬盘),如果有挂载东西,必须把“/media”也排除在外。
执⾏备份命令后,如果⽂件⽐较多可能需要很长时间,备份完成后,在⽂件系统的根⽬录将⽣成⼀个名为“backup.tgz”的⽂件,它的尺⼨有可能⾮常⼤。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ROS的备份和恢复
作者:佚名点击数:1927 更新:2009-11-14 2:15:11 ★★★收藏到QQ书签
1。
备份和恢复设置
你想想辛辛苦苦设置好的防火墙规则,网卡设置,各个路由,端口映射万一弄错了或重新安装时,是不是都要重新自已设置?这个巨麻烦!!!但ROUETOS却为你考虑得很周到,可以手工备份你的设置文件,需要时只要一个命令即可恢复!
大家可以用WINBOX登陆,注意用ADMIN帐号,在左边是不是有个FILES?点开,再点对话框上面的BACKUP,这样就把当前的设置保存一个文件里面了,再用IE登陆你的路由,用ftp://网管帐号:密码@路由IP:端口,登陆到你的路由后就会到你保存的文件了!用IE直接下载吧!
当你重新安装时,只要把内网弄通,用IE再登陆你的路由,把这个设置文件传上去,在WINBOX左边下面有个TE开头的英文,这是终端模拟,点开后就像在路由上操作一样,用以下命令恢复你以前的设置:system回车
backup回车
load 回车
提示重启就一下子恢复到你以前设置了!!
是不是方便实用啊?
大家可能会说用WINBOX备份不爽,那我们也可以用终端备份呀!
在WINBOX左边下面有个TE开头的英文,这是终端模拟,点开后就像在路由上操作一样,用以下命令备份你以前的设置:
system回车
backup回车
save 回车
建议文件名用日期表示可以很直观。
这样就按你的文件名保存了。
用LOAD NAME命令就是恢复了。
]
2.恢复路由本身默认值。
如果设错了规则或者地址,造成win不能进入管理界面,可以这样复原:
使用 admin 登陆
system 回车
reset 选择 y
将删除所有改动,恢复新装的状态
这个是恢复到出厂设置,很适合刚开始设置ROUTEOS时用用!
3。
备份ROUTEOS
可以用GHOST8。
0备份,注意是要用全盘备份,DISK TO IMG才行。
4。
简单化输入
在ROUTEOS是不是感觉输入命令很麻烦?
其实ROUTEOS可以只要输入前两位字母就可以了。
比如上面的命令:
system
backup
这是进入目录的,可以简化成:
sy
ba
即可!很适合一些懒人。
哈哈
5。
检查磁盘
在路由或终端模拟下用下面命令:
system
check-disk
检查磁盘,要重启。
但是很慢,一分钟一G。
哈哈
6。
关机
可以在WINBOX中关机,也可以用命令关:
system
sh
即可。
不过ROUTEOS关机不太好,像IPCOP可以直接关掉电源。
ROUTEOS不行。
还有,在IP---SERVICE里面可以打开或关闭路由本身各个端口,大家看着办吧,不过强列要求不要关闭WEB端口!!否则你的WINBOX连不上去。
FTP功能可以关掉,再把端口换掉。
用的时候打开就行了。
ROUEOS功能太强大了。
绝非普通路由所能比拟的,可以支持VPPP,就是多路由备份,主路由出现问题后可以自动调用备份路由。
强大。