基于STM32的大扭矩永磁同步电机控制系统设计
基于STM32F103的永磁同步电机控制系统设计
一
]
矢量)这8 。 个矢 量将 空 间分 成 了6 区域 , 个 区域 称 个 每
为 一 个 扇 区 。 据 矢 量 合 成 原 理 可知 , 根 在 、 坐 标 系 中 的任 意 一 矢 量都 可 以 由8 基 本 矢 量 中 的 与这 一 个 个
矢 量 相 邻 的2 基 本 矢量 来 合 成 。 个
可 以计算 出 脉冲 宽度 。 本矢 量 的作 用 时 间计 算如 基
下:
r= +『 y+
u 了U + x 了
式 中: 、 表示相 邻 的两个空 问矢量 , 、 表示 相邻 的 这 2 空 间矢量 的 作用 时 间, 1 个 7表示 零 矢量 的作 用时 间 。 0 以第 三 扇 区为 例 , 有 : 则
制 要 求 , 合 S M3 F 0 的特 点 , 实 现 思 路 、 件 电路 设 计 及 软 件 编 程 设 计 进 行 了系统 的 说 明 , 完 整 地 阐述 了交 流 结 T 2 13 对 硬 较
电机 的S WM 控 制 的 实现 。 VP
关 键 词 : T 3 ;VP M ; 磁 同 步 电机 S M 2S W 永
(u a n esy f eh o g , e a me t f l t n sF z o 0 0 , hn) F j n i r t o cn l y D pr n E e r i , uh u 5 1 8 C ia i U v i T o t o co c 3
A sr c : me o f VP M v r be r u n ys s m b s dOl T 3 F 0 o t l r s i u sd. r r igt h q i me t f b t tA a h t do S W ai l fe e c t a q y e a e iS M 2 1 3c nr l i ds se Ac ̄ dn oter ur oe c o e e n o
基于STM32的永磁同步电机驱动器设计
控制 电机 的转 矩 、 速度 和位置状 态 , 并且 不用 过大
进 入 了全数 字 的时 代 H 。全 数 字 伺 服 驱 动 器 不 仅 克服 了模 拟式伺 服 的分散 性大 、 漂 、 零 低可 靠性 等 问题 , 还充 分发 挥 了数 字 控 制 在 控 制精 度 上 的
A s a t T e ds n o p c lpr n n a ntsn hoo sm t ( MS d v r a r— b t c : h ei fasei e r g a ma e t g e y crn u oo P M) r e spe m r i w
s ntd,wh c s e eo e y sn a MSM d v e e ih wa d v l p d b u i g P i r e, S TM3 p o e s r f l re td o to 2 r c so , i d o n e c n r 分 。本 设 计 选 用 A M R
公 司 的 3 位 具 有 突 破 性 C r x—M 内 核 的 2 ot e 3
S M 2 13闪存 微 控 制器 作 为驱 动 器 的 核 心 , T 3F0 该 内核 是专 门设 计 于满足 集高 性能 、 低功 耗 、 有竞 具 争性 价格 于一 体 的嵌入式 领域 的要 求 。该控 制器
中图分类号 : M 2.1 T 9 15 文 献标 识 码 : A 文章 编 号 : 6 2- 3 8 2 1 ) 1 0 1一 4 1 7 4 4 (0 1 0 —06 o
stm32电机控制方案

STM32电机控制方案引言电机控制是嵌入式系统中一项重要的任务,它广泛应用于工业自动化、汽车、航空航天等领域。
STM32是意法半导体公司(ST Microelectronics)推出的一系列基于ARM Cortex-M内核的32位微控制器,具有强大的计算能力和丰富的外设接口。
本文将介绍如何使用STM32实现电机控制方案。
架构概述STM32电机控制方案的核心架构通常是一个闭环控制系统,包括电机驱动模块、传感器模块、控制算法和用户界面。
其中,电机驱动模块负责提供适当的电压和电流输出,传感器模块用于检测电机的位置和速度,控制算法根据传感器反馈和期望输出计算电机驱动信号,而用户界面则用于监视和调整系统参数。
选择合适的STM32微控制器在选择合适的STM32微控制器时,需要考虑以下因素:1.计算能力:根据电机控制算法的要求,选择具有足够计算能力的微控制器。
推荐选择Cortex-M4内核的芯片,因为它具有浮点运算单元和DSP指令集,适合复杂的算法计算。
2.外设接口:考虑电机控制方案所需的外设接口,例如PWM输出、通信接口(如UART、CAN、Ethernet等)、模拟输入输出和定时器等。
根据具体需求选择型号和封装。
3.成本和功耗:根据项目预算和功耗要求选择合适的芯片。
STM32系列芯片提供了多个系列和型号,根据具体需求选择性价比最高的芯片。
电机驱动模块设计电机驱动模块是STM32电机控制方案的重要组成部分。
常用的电机驱动方案有PWM驱动和直流(DC)电机驱动。
PWM驱动PWM驱动是控制电机速度和转向最常用的方法。
STM32微控制器的GPIO外设具有强大的PWM功能,可以直接输出PWM信号。
通过调整PWM占空比可以调节电机的速度,而通过改变PWM的频率可以改变电机的转向。
在PWM驱动中,建议选择基于半桥驱动和脉冲变幅调制(PWM)技术的芯片。
直流(DC)电机驱动直流电机驱动常用于对电机进行精确控制的场景。
通过控制电机的电压和电流,可以实现对电机速度、位置和扭矩的精确控制。
stm32电机控制方案

stm32电机控制方案STM32电机控制方案引言在嵌入式系统中,电机控制是一项非常重要的任务。
STM32是一款广泛应用于嵌入式系统中的微控制器,具有较强的性能和灵活性。
本文将探讨一种基于STM32的电机控制方案,介绍方案的设计原理、硬件连接和软件实现。
设计原理电机控制方案主要包括三个方面:传感器接口、电机驱动和控制算法。
本方案采用带有编码器的直流无刷电机,通过传感器接口获取电机的速度和位置信息;使用PWM信号驱动电机,通过电机驱动器将电源信号转换为适合电机的供电信号;控制算法根据传感器接口获取的信息,通过调整PWM信号的占空比来控制电机的转速和位置。
硬件连接硬件连接包括STM32微控制器、电机驱动器和直流无刷电机。
首先,将STM32的引脚与电机驱动器的控制引脚相连,用于发送PWM信号。
然后,将电机驱动器的输出引脚与直流无刷电机的驱动引脚相连。
此外,将电机驱动器的电源引脚与电源相连,确保电机获得足够的供电。
以下是硬件连接示意图:```STM32引脚 -> 电机驱动器控制引脚电机驱动器输出引脚 -> 直流无刷电机驱动引脚电机驱动器电源引脚 -> 电源```软件实现软件实现主要包括配置STM32的GPIO引脚、设置PWM输出、读取传感器接口的值和实现控制算法。
首先,需要配置STM32的GPIO引脚。
选择合适的引脚作为PWM输出引脚,并将其设置为输出模式。
接下来,设置PWM输出。
通过调整PWM的占空比来控制电机的转速和位置。
根据具体的需求,可以选择不同的PWM输出频率和占空比范围。
然后,读取传感器接口的值。
根据电机的类型和具体的传感器接口,使用适当的方法读取电机的速度和位置信息。
最后,实现控制算法。
根据传感器接口获取的值,通过调整PWM输出的占空比来实现电机的控制。
常见的控制算法包括PID控制和电机状态估计。
结论STM32是一种强大而灵活的微控制器,适用于各种电机控制方案。
本文介绍了一种基于STM32的电机控制方案,包括设计原理、硬件连接和软件实现。
基于STM32的电机驱动系统的设计毕业设计论文
毕业设计论文基于STM32的电机驱动系统的设计毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日注意事项1.设计(论文)的内容包括:1)封面(按教务处制定的标准封面格式制作)2)原创性声明3)中文摘要(300字左右)、关键词4)外文摘要、关键词5)目次页(附件不统一编入)6)论文主体部分:引言(或绪论)、正文、结论7)参考文献8)致谢9)附录(对论文支持必要时)2.论文字数要求:理工类设计(论文)正文字数不少于1万字(不包括图纸、程序清单等),文科类论文正文字数不少于1.2万字。
基于STM32的永磁同步电机的控制共3篇
基于STM32的永磁同步电机的控制共3篇基于STM32的永磁同步电机的控制1永磁同步电机(Permanent Magnet Synchronous Motor,简称PMSM)是一种极具应用前景的高性能电机,被广泛应用于交通工具、家电、机械设备等领域。
随着电动汽车、新能源等产业的发展,PMSM的控制技术也越来越受到关注。
本文将基于STM32单片机,介绍PMSM的控制过程和相关技术。
一、PMSM的基本原理PMSM的基本原理是将定子上的三相绕组和转子上的永磁体之间的电磁作用力转化为机械转矩。
其中,定子上的三相绕组通过交流电源得到三相交流电,产生旋转磁场。
转子上的永磁体则产生磁动势,与旋转磁场作用产生转矩。
为了使PMSM能够实现精确的控制,需要知道其电磁状态,即定子电流、转子位置等信息。
接下来,我们将介绍PMSM的控制过程和所需技术。
二、PMSM的控制过程1. 传感器获取PMSM的控制需要准确的电磁状态信息,因此需要安装传感器获取定子电流、转子位置等信息。
一般来说,采用霍尔传感器或编码器获取转子位置信息,采用霍尔电流传感器或电阻分压电路获取定子电流信息。
2. 位置估算针对没有安装位置传感器的情况,可以采用磁场观测器或滑模观测器等算法来实现位置估算。
3. 控制算法选择对于PMSM的控制算法,可以选择基于直流型或交流型控制的空间矢量调制(Space Vector Modulation,简称SVPWM)或PI控制等算法。
其中,基于直流型控制的SVPWM由于计算量小、实现简单,更适合嵌入式单片机平台。
4. 控制器的设计与实现选择STM32单片机作为PMSM控制器,需要进行硬件和软件的设计与实现。
在硬件设计方面,需要选择合适的器件如功率MOS管、光耦、保险丝等;在软件实现方面,需要编写电机控制程序,实现数据采集、控制算法等功能。
5. 闭环控制系统搭建为了保证PMSM控制精度,需要建立闭环控制系统。
一般由电流环、速度环、位置环组成。
基于STM32F103的永磁同步电机控制系统设计

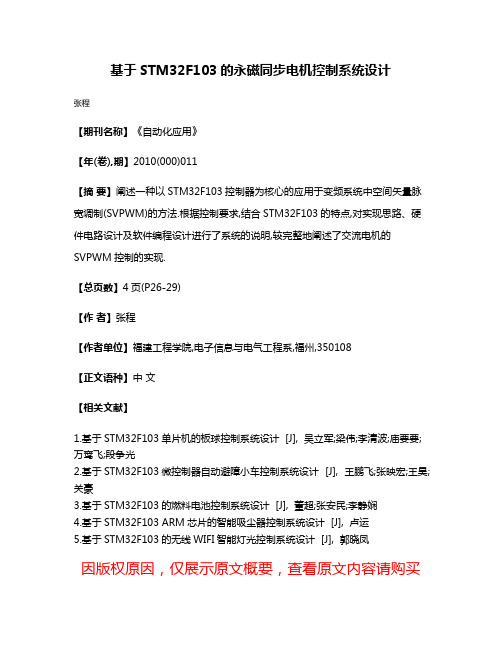
ia ib
电机
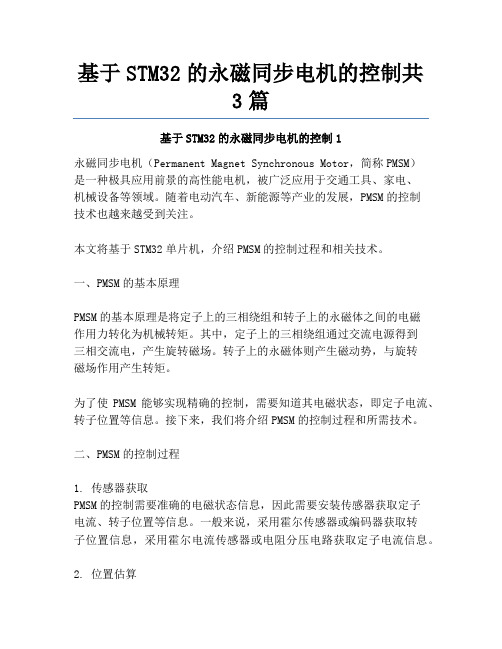
图 1 控制系统原理图
首先要把电机方程中的同步旋转坐标系从三相 变换为两相(简称为3/ 2 变换)。3/ 2 变换包括了Clarke 变 换和Park 变换,前者是将三相同步旋转坐标系变换到两 相静止坐标系, 后者则是将两相静止坐标系变换到两 相同步旋转坐标系。Clarke 和Park 变换是空间磁场定向
自动化应用 2010 11期 2 7
变频节能及软起动系统
确定I G B T 的动作时间, 从而产生P W M 波。
2 系统硬件组成
本系统由永磁三相同步电动机、以S T M 3 2 F 1 0 3 控制 器为核心的控制电路、定子电流检测环节和以智能功率 模块P M 2 0 C S J 0 6 0 为主的逆变电路等构成。系统的所有控 制和调节全部由STM32F103控制器用软件控制来完成,控 制电路板直接输出S V P W M 信号, 经光电隔离接入驱动电 路板上的I P M模块,驱动P M S M , 实现对空调的变频控制。
式中: Ux、Uy表示相邻的两个空间矢量, Tx、Ty表示相邻的 这2个空间矢量的作用时间, T0表示零矢量的作用时间。 以第三扇区为例, 则有:
求解此方程就得到了在第三扇区由Uα、Uβ表示的 矢量作用时间表达式
其它扇区的求解过程和第三扇区一样, 这样就可 以得到8 个基本矢量的作用时间[ 3 ]。由作用时间便可以
1 系统控制原理 1.1 空间磁场定向控制[1]
为了使控制系统具有良好的变频调速性能, 控制
作者简介:张 程(1982-),硕士,研究方向为信号检测与控制。 收稿日期:2010-10-12 基金项目:福建省汽车与电驱动技术重点实验室开放基 金资助项目(项目编号2010002)
基于STM32的双轮扭扭车控制系统设计
Digital Space R147
技术 交流
控 制量进 行 PID闭环 控制 ,使 得 电机的 转速 达 到所需 控制 转速 。 板 电源 模 块 、电机 驱 动 电路 模块 等 。主 电路板 的 电路 原 理 图如 图
与前 进控 制 方 式 相似 ,后退 、左转 、右 转 均 通 过 对左 右 两 个车 轮 4所 示 ,所开 发的 主电路板 实 物图如 图 5所 示 。
ADC
号
副板电源模块 I
烈皂 一(毒!…~ 一一一丰 挥……、 一戳 髓 . 直
姿态 检测 IIC 模块
主
』L ..上
—
控芯 串口 -j主控芯片 I· 串口
I 片 1
【
-- ··。。 。·。
J
‘ 。__ _。 ·_
控 0 片芯
姿态 l 检测 l 模块 l
l副板 电源模 块
、
圈 1双轮 扭扭 车平衡 愿理 分析 此 后,扭 扭车 的 姿态 传感 器定时采 集左 右两边车 轮 的姿 态信 息 (角度 和角速 度 ),通 过驱 动电机 转动 ,使 扭扭 车的转 速能 够有 效保 证骑行 者的 身体平 衡,并产 生一定移动 速 度。 另外 ,在 每一 次 定 时采集 姿 态信 息的 循环 中,还需 要对 电机
荛控芯片模块 … IIl lii l
嘞 ‘
藏缸屯踌 :嚣 ; ’
: - ~ ■ 』 _ ^ ■_
忡 I ●_
自刚
:
.
啡 0i ● ●■■●
屯疆检测I钮黠
:l = . 螽i垃 轴盘覃璎龋
I ● ■■- * ·●
一 , :: 一 号 …一 。 … h '_ ::::向j 搏芯片输出脚牟特转
基于STM32的高精度扭矩测量系统设计
扭矩传感器输 出信号经过低通滤 波后 , 送入 内置 P G A的 2 4位高精度 - △A / D转换器 A D S 1 2 5 5 。然后 , 主
控制 器 S T M3 2通过 S P I 读取 A / D转换结果 , 通过移 动加 权平均滤 波算法 消除 随机干扰 噪声 , 进而计 算扭 矩值 , 将测 量结 果存 储在外部 F L A S H并送 L C D实 时显示 。现场 测试结果表明 : 系统精 度达到 0 . 6 %F . S . 。
ma st e r c o n t r o l l e r S T M3 2 r e a d s A / D c o n v e r s i o n r e s u l t b y S P I a n d c lc a u l a t e s t h e t o r q u e v lu a e s b y mo v i n g we i g h t e d
( S c h o o l o f E l e c t r o n i c a n d I n f o r ma i t o n E n g i n e e r i n g , L a n z h o u J i a o t o n g U n i v e r s i t y , L a n z h o u 7 3 0 0 7 0 , C h i n a )
关 键 词 :扭 矩 测 量 ; S T M 3 2 ; A / D转 换 ;移 动 加 权 平 均 滤 波 中 图 分 类 号 :T P 2 7 1 文 献 标 识 码 :A 文 章 编 号 :1 0 0 0 - 9 7 8 7 ( 2 0 1 5 ) 0 4 - 0 0 9 9 - - 0 3
ADS 1 2 5 5 wh i c h i s a 2 4 b i t , h i g h — p r e c i s i o n, b u i l t — i n P GA, ∑- A A /D e o n v e  ̄e r a f t e r l o w— p a s s f i l t e r i n g . T h e n, t h e
基于STM32的永磁同步电机的控制(电流采样、波形参考)

2.2.1 2.2.2 2.3
空间矢量脉宽调制算法(SVPWM) ................................... 11 电压矢量与磁链矢量的关系 .................................... 12 基本空间电压矢量 ............................................ 13 任意空间电压矢量的合成 ...................................... 15 空间电压矢量扇区判断 ........................................ 18 空间电压矢量的时间计算 ...................................... 20
3.2.1 3.2.2 3.2.3 3.3
功率驱动电路设计 ................................................ 27
3.3.1 3.3.2 3.4
MOS 驱动器 .................................................. 27 自举电源设计 ................................................ 27
III
目
录
第一章 绪 论............................................................ 1 1.1 1.2 引言 ............................................................. 1 伺服控制系统概况 ................................................. 1 伺服系统的发展 ............................................... 1 永磁同步电机伺服系统的发展 ................................... 2
stm32电机控制方案

stm32电机控制方案随着科技的不断发展,电机控制技术也得到了长足的发展。
STM32作为一种高性能的单片机,已经成为了现代电机控制领域的佼佼者之一。
在本文中,我们将探讨STM32电机控制方案。
一、STM32电机控制的基本原理STM32电机控制方案的基本原理是使用单片机来控制电机运转,从而实现更加高效和精准的控制。
为了实现这一目标,STM32需要加入与电机有关的PWM控制、传感器采集、速度控制等模块。
具体实现方法包括以下几个步骤:1.采集电机信息在STM32控制电机之前,首先需要了解当前电机的相关信息,包括电机的工作状态、速度、位置等。
STM32可以利用各种感应器来进行检测,例如:编码器、霍尔传感器、电阻传感器等等。
2.确定电机控制方案选定电机控制方案是STM32电机控制过程中非常重要的一步。
通常情况下,采用的控制方案有电流控制、速度控制和位置控制等。
选择最佳方案要根据具体的系统要求和性能要求来做出合理的决策。
3.实施电机控制在确定电机控制方案之后,就可以开始实施电机控制了。
这一步需要使用STM32的GPIO、ADC、PWM、定时器、中断等模块来进行控制,最终实现对电机的精准控制。
二、STM32电机控制方案的优缺点1.优点对于STM32电机控制方案而言,最大的优点就是它能够提供更高效、更精准的电机控制。
单片机控制电机的过程中,传感器采集数据更加精准,同时使用PWM控制电机也可以更好的控制电机的速度和位置。
2.缺点虽然STM32电机控制方案的优点很多,但是也有一些缺点。
首先,使用STM32需要一定的硬件基础,另外,相对于其他控制器,它的芯片成本也稍微高一些。
三、STM32电机控制方案的应用场景STM32电机控制方案在工业、智能家居、机器人和汽车等领域都有着广泛的应用。
其中应用的类型包括:风扇控制、电动机控制、水泵控制、磨床控制等等。
结论:总的来说,STM32电机控制方案是现代电机控制领域的一种重要技术。
基于stm32的步进电机控制系统设计与实现
基于stm32的步进电机控制系统设计与实现基于STM32的步进电机控制系统设计与实现步进电机是一种通过对电机的脉冲信号进行控制,使得电机按照一定角度或步长旋转的电机。
在许多应用中,如打印机、数控机床、纺织机械等场合,步进电机被广泛应用。
本文将介绍基于STM32的步进电机控制系统的设计与实现。
1. 系统设计在步进电机控制系统的设计中,首先需要确定系统的功能和要求。
常见的步进电机控制系统一般包括以下几个部分:1.1 信号发生器:信号发生器负责生成电机驱动的脉冲信号。
可以使用定时器或外部模块产生高频率的脉冲信号,同时可以通过调整频率和占空比来控制电机的转速和方向。
1.2 位置检测:位置检测模块用于监测电机的旋转角度,并将检测的位置信息反馈给控制系统。
常用的检测方式包括光电传感器、编码器等。
1.3 控制算法:控制算法根据位置信息和系统要求,计算出电机的驱动信号,控制电机的旋转。
常见的控制算法包括开环控制和闭环控制,其中闭环控制更精准。
1.4 驱动模块:驱动模块负责将控制信号转换成适合步进电机的驱动信号,以驱动步进电机旋转。
2. 硬件实现基于STM32的步进电机控制系统的硬件实现主要包括STM32微控制器、步进电机驱动模块和位置检测模块。
2.1 STM32微控制器:选择适合的STM32微控制器作为系统的核心,根据步进电机的要求,选择合适的型号,例如STM32F4系列或STM32F7系列。
2.2 步进电机驱动模块:选择适用于步进电机的驱动模块,常见的驱动模块有A4988、DRV8825等。
驱动模块通常需要电平转换和增加电流限制,以保证步进电机的正常工作。
2.3 位置检测模块:选择合适的位置检测模块,根据具体的需求可以选择光电传感器、编码器等。
位置检测模块通常需要与STM32微控制器进行连接,将检测到的位置信息传输给控制系统。
3. 软件实现基于STM32的步进电机控制系统的软件实现主要包括控制算法的编写、驱动模块的配置和位置检测模块的读取。
基于stm32的电机调速系统设计

基于stm32的电机调速系统设计本文主要介绍了一种基于STM32的电机调速系统的设计方案。
该系统通过采用STM32单片机作为主控芯片,结合电机驱动模块和传感器模块,实现了电机的精确调速和位置控制。
具体来说,本文首先介绍了电机调速系统的基本原理和应用场景,然后分别介绍了STM32单片机的硬件架构和软件开发环境,接着详细介绍了电机驱动模块和传感器模块的设计原理和实现方法,最后进行了系统测试和性能评估,并给出了优化方案和未来发展方向。
在电机调速系统的设计中,STM32单片机作为主控芯片,具有高性能、低功耗、易于扩展等优点。
同时,通过合理的电机驱动模块和传感器模块的设计,能够实现电机的精确调速和位置控制,满足不同的应用需求。
例如,在机械加工、自动化生产、环境控制等领域均有广泛的应用。
在STM32单片机的硬件架构和软件开发环境方面,本文介绍了STM32F103C8T6型号的主要硬件特性和基于Keil C51开发环境的软件开发方法。
该型号具有72MHz的主频、64KB的Flash存储器、20KB 的SRAM存储器等特点,能够满足电机调速系统的实际需求。
同时,通过Keil C51开发环境的使用,能够方便地进行软件开发、调试和优化。
在电机驱动模块和传感器模块的设计方面,本文分别介绍了直流电机和步进电机的驱动原理和实现方法,以及光电编码器和霍尔传感器等位置传感器的选择和应用。
通过合理的电机驱动和位置反馈控制,能够实现电机的稳定调速和精确定位。
在系统测试和性能评估方面,本文利用实际的电机调速系统进行了测试和评估。
通过测试,发现该系统具有良好的稳定性、精确性和可靠性,能够满足实际应用需求。
同时,本文还给出了优化方案和未来发展方向,以便更好地满足不同应用场合的需求。
基于STM32的交流永磁同步电机驱动器设计

引言
近年来,随着微电子技术、电力电子技术、现代控制技术、材料技术的迅速发展以及电机制造工艺水平的逐步提高,交流永磁同步电机以其体积小、结构简单等特点在工农业、日常生活以及许多高科技中迅速得到了广泛的应用。因此,研究设计高精度、高性能的永磁同步电机成为现代电伺服驱动系统的一个发展趋势。
2.3 温度检测电路
IPM芯片内部集成了温度保护功能,图3为IPM驱动芯片的温度检测电路。芯片内部含有热敏电阻,当温度过高时就会通过检测电路的电压比较器输出故障信号反馈给IPM芯片的7引脚,在芯片内部经分析处理后采取及时的措施对系统进行保护,如将IGBT软遮断,当温度正常时再解除保护。
2.1 TOP—Switch开关电源
由TOP—Switch系列芯片构成的应用电路具有最低的成本和元器件数目,AC/DC转换效率高达90%,芯片内部还集成了自动复位启动和限流功能电路。为了实现电源系统的安全保护,芯片内部还具有一个触发式热关断电路,可构成反激式、正激式、升压式和降压式结构的电源电路。本文采用TOP-222芯片设计了一款反激式开关电源,输出4路独立+15 V电源为逆变器的上下桥臂提供控制电源,保证逆变器的稳定工作,通过稳压管可转换成电路中其他器件提供所需的工作电压。
2.2 IPM工作原理
功率驱动芯片采用FSAM20SH60,输出100~253 V交流电压,最大驱动功率1.5 kW,开关频率可达15 kHz。内部集成了电压、电流保护电路,当系统出现故障时可及时切断输出电流,保护电机不被烧毁。,STM32内部通过相应的算法输出6路PWM信号,经光耦HCPL-4050隔离放大后作为IPM的输入信号,来控制逆变桥的导通与关断,从而实现对电机转速的精确控制。其中,逆变器的每个上桥壁分别采用独立的控制电源以提高系统的可靠性,这个独立的电源由开关电源来提供。
基于stm32的步进电机控制系统设计与实现
基于stm32的步进电机控制系统设计与实现基于STM32的步进电机控制系统设计与实现1.引言步进电机作为一种常用的电机类型,其运动精度高、响应速度快,广泛用于各种自动化控制系统中。
本文基于STM32微控制器,设计并实现了一个步进电机控制系统,旨在实现步进电机的精确控制和高效运动。
2.系统架构步进电机控制系统的基本架构包括电机驱动模块、控制模块和用户界面模块。
其中,电机驱动模块负责将控制信号转化为电机驱动信号,实现步进电机的精确控制;控制模块负责生成控制信号,控制步进电机的转动方式和速度;用户界面模块则提供用户交互接口,方便用户对步进电机的控制进行配置和监测。
3.硬件设计硬件设计包括STM32微控制器的选型和电机驱动电路的设计。
对于STM32选型,需要考虑处理器的计算能力和IO口的数量和功能,以及是否支持步进电机驱动的相关功能。
对于电机驱动电路的设计,需要选择适合步进电机的驱动芯片,并结合电机的特性设计适当的电源、滤波和保护电路。
4.固件设计固件设计是步进电机控制系统的核心部分,主要包括控制算法和通信协议。
控制算法通常使用脉冲/方向控制方式,通过控制PWM信号的占空比和频率实现步进电机的转动和速度控制。
通信协议可以选择UART、SPI或者I2C等常用的串行通信方式,通过与上位机或其他外部设备进行通信,实现系统的配置和监测功能。
5.软件实现软件实现主要包括嵌入式软件的开发和上位机软件的开发。
对于嵌入式软件,需要使用相关的开发工具,如Keil或STM32Cube IDE,编写控制算法和通信协议的代码,并进行调试和验证。
上位机软件则负责与嵌入式系统进行通信,提供配置和监测界面,并可通过图形化界面实现系统参数的配置和调节。
6.测试与验证测试与验证是确保步进电机控制系统功能和性能的有效手段。
可以通过虚拟仿真和实际硬件测试两种方式进行。
虚拟仿真可以通过软件仿真工具进行,验证系统功能的正确性和逻辑的合理性;实际硬件测试则需要将系统部署到实际硬件平台上,通过对电机运动和系统功能的实际操作和观察,验证系统的性能和稳定性。
基于STM32控制器的永磁同步电机控制系统研究

中图分类号:TP807
文献标识码:A
文章编号:1674-6236(2021)14-0101-05
DOI:10.14022/j.issn1674-6236.2021.14.022
Research on control system of permanent magnet synchronous motor based on STM32 controller
在 工 业 生 产 实 践 中 ,永 磁 同 步 电 机 交 流 伺 服 的 性 能 和 控 制 策 略 有 较 高 的 提 升 ,同 时 工 业 界 对
系 统 起 着 重 要 作 用 ,在 各 个 领 域 的 应 用 日 趋 广 永磁同步电机控制系统也有着越来越高的要求[1-3]。
泛 。 随 着 自 动 化 技 术 的 迅 速 发 展 ,永 磁 同 步 电 机 我 国 对 永 磁 同 步 电 机 交 流 控 制 技 术 研 究 较 晚 ,直
收稿日期:2020-07-09 稿件编号:202007051
至 20 世 纪 70 年 代 才 开 始 着 力 于 该 方 面 的 研 究 。
基 金 项 目 :安 徽 省 高 等 学 校 教 学 研 究 重 点 项 目(2019jyxm 0898;2017jyxm 0935);安 徽 省 教 育 厅 科 研 处 重 点 项 目
基于STM32的大扭矩永磁同步电机驱动系统

0 引言大扭矩永磁同步电机直接驱动由于去掉了复杂的机械传动机构,从而消除了机械结构带来的效率低、维护频繁、噪声与转动惯量大等不利因素,具有效率高、振动与噪声小、精度高、响应快、使用维修方便等一系列突出优点[1].近年来,随着电力电子技术、永磁材料、电机设计与制造技术、传感技术、控制理论等的发展,大扭矩永磁同步电机在数控机床、矿山机械、港口机械等高性能系统中得到了越来越广泛的应用[2 - 3].交流电机控制系统广泛采用单片机、DSP、FPGA为控制系统核心。
STM32 是一种基于ARM 公司Cortex-M3 内核的新型32 位闪存微控制器,采用了高性能、高代码密度的Thumb-2 指令集和紧耦合嵌套向量中断控制器,拥有丰富的外围接口,具有高性能、低成本、低功耗等优点[4].本文针对一种港口机械用大扭矩永磁同步电机驱动系统,采用STM32 + IPM 硬件构架设计了高性能、低成本的控制系统。
1 大扭矩永磁同步电机矢量控制原理忽略电机的铁心饱和、涡流及磁滞损耗,不计漏磁通的影响,大扭矩永磁同步电机的电压、磁链、转矩方程分别为式中,ψd、ψq、ud、uq、id、iq、Ld、Lq分别为永磁同步电机d、q 轴的磁链、电压、电流和电感,Rs为电枢绕组电阻,ωr为转子角速度,ψf为永磁体产生的与转子交链的磁链,Te为电磁转矩,Pn为电机磁极对数。
由式( 3) ,控制id = 0 使定子电流矢量位于q轴,此时转矩Te和iq呈线性关系,实现电磁转矩的解耦控制。
如图1 所示,本文的永磁同步电机采用速度、电流双闭环控制,图中ω* 为给定速度指令,ω为速度反馈,将速度误差输入速度控制器,输出交轴电流指令i*q,通过电流PI 控制器和坐标变换,再利用SVPWM 产生IPM 开关信号。
图1 大扭矩永磁同步电机控制原理框图2 系统设计图2 所示为该系统结构框图,本文采用STM32F103VCH6 主控芯片、PM800HSA120 智能功率模块为系统核心,硬件控制系统主要有:处理器模块; 检测模块,主要包括霍尔电流检测、旋转变压器接口电路; 主电路,主要由整流、软启动、滤波、制动电路,以及PM800HSA120 及其驱动、保护、吸收电路组成; 开关电源及其他模块,主要由多路DC /DC 转换、直流母线电压保护、温度检测保护等电路组成。
基于STM32的永磁同步电机控制系统

基于STM32的永磁同步电机控制系统张盼盼【摘要】本文将探讨基于ARM的标准微控制器如何在一个被DSPFPGA长期垄断的市场上打破复杂的控制模式,我们将以意法半导体的基于Cortex-M3内核的STM32系列微控制器为例论述这个过程。
【期刊名称】《今日电子》【年(卷),期】2012(000)012【总页数】3页(P57-58,61)【关键词】电机控制系统;永磁同步;微控制器;意法半导体;控制模;ARM【作者】张盼盼【作者单位】西安工程大学【正文语种】中文【中图分类】TM301.2本文将探讨基于ARM的标准微控制器如何在一个被DSP和FPGA长期垄断的市场上打破复杂的控制模式,我们将以意法半导体的基于Cortex-M3内核的STM32系列微控制器为例论述这个过程。
首先,我们回顾一下电机控制的基本原理。
在电机控制系统内,为什么处理器非常重要?我们为什么需要非常好的计算性能?毕竟,Nicolas Tesla在一个世纪前发明交流电机时不需要编译器。
只要需要调速,人们无法回避使用逆变器驱动一个性能不错的三相电机,控制一个永磁同步电机(PMSM)运转更离不开逆变器。
这个复杂的功率电子系统的核心是一个直流转交流的三相逆变器,其中,微控制器起到管理作用,以全数字方式执行普通的三位一体的控制功能:检测(电流、转速、角度……)、处理(算法、内务管理…)、控制功率开关(最低的配置也至少有6个开关)。
众所周知,因为直流电动机中产生转矩的两个要素励磁磁通和电枢电流相互间没有耦合的关系,所以直流电机可以通过控制相应电流从而就可以非常容易的实现电机转速的控制和调节。
然而由于直流电机本身结构机械换向器和电刷存在重大的缺陷,致使直流电机调速系统的应用推广受到了限制。
随着技术的发展,人们发现交流电动机可以解决这些缺点。
由于交流电机结构简单、坚固耐用、运行可靠,特别是它克服了直流电机存在电刷和机械换向器而带来的各种限制,因此在工农业生产中得到了极为广泛的推广。
基于STM32F103的永磁同步电机控制系统设计
基于STM32F103的永磁同步电机控制系统设计
张程
【期刊名称】《自动化应用》
【年(卷),期】2010(000)011
【摘要】阐述一种以STM32F103控制器为核心的应用于变频系统中空间矢量脉宽调制(SVPWM)的方法.根据控制要求,结合STM32F103的特点,对实现思路、硬件电路设计及软件编程设计进行了系统的说明,较完整地阐述了交流电机的SVPWM控制的实现.
【总页数】4页(P26-29)
【作者】张程
【作者单位】福建工程学院,电子信息与电气工程系,福州,350108
【正文语种】中文
【相关文献】
1.基于STM32F103单片机的板球控制系统设计 [J], 吴立军;梁伟;李清波;庙要要;万鸾飞;段争光
2.基于STM32F103微控制器自动避障小车控制系统设计 [J], 王鹏飞;张映宏;王昊;关豪
3.基于STM32F103的燃料电池控制系统设计 [J], 董超;张安民;李静娴
4.基于STM32F103 ARM芯片的智能吸尘器控制系统设计 [J], 卢运
5.基于STM32F103的无线WIFI智能灯光控制系统设计 [J], 郭晓凤
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
到 了越来 越 广泛 的应用 -] 3。
() 1
L q=R。q+d /d u i g t+∞
+流 电机控 制 系 统 广 泛 采用 单 片机 、D P P S 、F .
摘 要 :针对一种应用于港 口机械的大扭矩永磁同步 电机直接驱动系统 ,本文分析 了其矢量控制原 理 ,以 S M 2微 T3
处理器为核心进行 了控制系统软硬件设计 ,重点介绍 了 S M 2处理器模块 、增益可调的电流检测 电路 、旋转 变压器 T3
接 口电路 、IM驱动保护 电路等的设计与实现 ,最后通过实验验证 了控制系统 的有效性 。 P 关键词 :同步 电机 ;矢量控制 ;S M3 ;增益可调 T 2
第4 5卷 第 5期
2 2焦 01
截 '瓤 I }
MI CR0MOTORS
Vo. 5 N . 14 . o 5
Ma v201 2
5月
基 于 S M3 T 2的大 扭 矩 永磁 同步 电机 控 制 系统 设 计
王 俊 ,李 小清 ,曾理湛 ,王 玉凯
( 中科技大学 ,武汉 华 4 07 ) 3 04
高性能 、高代码密度 的 T u b2 h m . 指令集 和紧耦合嵌 套向量 中断控制器 ,拥有 丰富的外 围接 口,具有高 性能、低成本、低功耗 等优点 j 。本文针对一种港 口机 械 用 大 扭 矩 永 磁 同 步 电 机 驱 动 系 统 ,采 用
A s at i n t i c di yt f iht q epr a etm ge sn ho o sm t P M) b t c:Amiga adr t r ess m o hg — ru em nn an t y c rn u oo r e v e a o r( MS
u i g frpo tma h n re ,t e v c o o to rncp e o h o s e d h g t r ue PMS wa nay e sn o r c i e i s h e tr c n r lp i i l f t e lw-p e ih-o q M s a lz d. Te h n,t e c n r ls se wi TM3 c o o tolra h o e wa e in d.Th TM3 o to d l h o to y t m t S h 2 mir c n r le st e c r sd sg e eS 2 c n r lmo u e,
cr n d tc o i ut wt ajs begi ,rsl ri efc i ut a dteIM die n rtc o ur t e t ncr i i dut l a e ei c s h a n eo e tr ec c i n h P r ra dpo t n v n a r s v ei
G A为 控 制 系统 核 心 。S M3 T 2是 一种 基 于 A M 公 司 R
T 孚[ + L o ( q = 一 ) ]
式中,
( 3
C r xM3内核 的新 型 3 ot — e 2位 闪 存 微 控 制器 ,采 用 了
、 、 、i i、L 、L 分别 为 永 磁
cr u t r e in d a d i ic iswe e d sg e n mplme td.Fi al e ne n ly,t e p o o e o to y tm sv rfe t x e i n s h r p s d c n rls se wa e i d wih e p rme t . i
制 系统 。
的机械传动机构,从 而消除了机械结构带来 的效率
低 、维护 频 繁 、噪声 与 转 动 惯 量 大 等 不 利 因 素 ,具 有 效率 高 、振 动 与 噪声 小 、精 度 高 、响应 快 、使 用 维 修方便 等 一 系 列 突 出优 点 H 。近 年 来 ,随着 电力 ]
W AN J n, L a qn G u IXio ig, Z G i a EN Lz n,W ANG Yu a h ki
( ahn n esyo i c a dTcnl y ua 30 4 C i ) Huzog U irt fS e e n ehoo ,W hn407 , hn v i c n g a
1 大 扭 矩 永磁 同步 电机 矢 量 控 制 原 理
忽 略 电机 的铁 心饱 和 、涡 流 及 磁 滞 损 耗 ,不 计
漏 磁通 的影 响 ,大扭 矩永磁 同步 电机 的电压 、磁链 、
转 矩方 程分 别 为
U sd+d /d r d= d 一
电子技术 、永磁材料 、电机设计与制造技术、传感 技术 、控制理论等 的发展 ,大扭矩永磁 同步 电机在
Ke o d : MS v c rcnrl T 2 dutbegi yw r s P M; et o t ;S M3 ;ajs l a o o a n
0 引 言
大扭 矩永 磁 同 步 电 机直 接 驱 动 由于 去 掉 了复 杂
S M3 T 2+IM 硬 件 构 架 设 计 了高 性 能 、低 成 本 的控 P
中图分类号 :T 5 ;T 3 1 M3 1 M 4 文献标 志码 :A 文章编 号 :10 —8 8 2 1 )50 3 —5 0 164 (0 2 0 —0 60
De in o i h—o q sg fa H g t r ue PM S nt o y tm s d o TM 3 M Co r lS se Ba e n S 2