雷达(幻灯片)(04)
合集下载
雷达介绍PPT课件

方位360o L波段(1~2G)
05.12.2020 22
四、雷达的应用
3、引导指挥雷达(监视雷达)
能对多批次目标同时检测 测量目标的精度和分辨力较高
S波段(2~4G)
05.12.2020 23
四、雷达的应用
4、火控雷达
作用距离小 测量精度高
05.12.2020 24
四、雷达的应用
5、制导雷达
05.12.2020 10
三、雷达的发展历史
•1842年,奥地利物理学 家多卜勒——率先提出了 速度与音高关系的多卜勒 效应。
•1865英国物理学家 Maxwell ——描述了电磁 场理论
•1886德国物理学家 Hertz ——发现了电磁场 并证明了 Maxwell 的理论
05.12.2020 11
05.12.2020 15
三、雷达的发展历史
•合成孔径雷达、相控阵雷达、脉冲多普勒雷达在70年代得到新 的发展。 •70年代中期,合成孔径雷达的计算机成像。装在卫星的合成孔 径雷达获得分辨率25×25m的雷达图像,1cm波段的机载合成 孔径雷达可以达到0.09m2的分辨率。 •70年代越南战争后期,出现用甚高频(VHF)雷达探测地下坑 道。 •空间应用方面,雷达用来帮助“阿波罗”飞船在月球着陆,在 卫星方面被用作高度计,测量地球及其表面的不平度。 •70年代,“丹麦眼镜蛇”雷达是一部又代表性的大型高分辨率 相控阵雷达,美国将该雷达用于观测,跟踪苏联勘查加半岛下 靶场上空的多个再入弹道导弹的弹头。
05.12.2020 7
一、雷达的任务
➢目标距离的测量 ➢目标方位和仰角的测量 ➢相对速度的测量 ➢目标尺寸和形状的测量 ➢目标形状的对称性 ➢目标的粗糙度和介电特性
05.12.2020 8
05.12.2020 22
四、雷达的应用
3、引导指挥雷达(监视雷达)
能对多批次目标同时检测 测量目标的精度和分辨力较高
S波段(2~4G)
05.12.2020 23
四、雷达的应用
4、火控雷达
作用距离小 测量精度高
05.12.2020 24
四、雷达的应用
5、制导雷达
05.12.2020 10
三、雷达的发展历史
•1842年,奥地利物理学 家多卜勒——率先提出了 速度与音高关系的多卜勒 效应。
•1865英国物理学家 Maxwell ——描述了电磁 场理论
•1886德国物理学家 Hertz ——发现了电磁场 并证明了 Maxwell 的理论
05.12.2020 11
05.12.2020 15
三、雷达的发展历史
•合成孔径雷达、相控阵雷达、脉冲多普勒雷达在70年代得到新 的发展。 •70年代中期,合成孔径雷达的计算机成像。装在卫星的合成孔 径雷达获得分辨率25×25m的雷达图像,1cm波段的机载合成 孔径雷达可以达到0.09m2的分辨率。 •70年代越南战争后期,出现用甚高频(VHF)雷达探测地下坑 道。 •空间应用方面,雷达用来帮助“阿波罗”飞船在月球着陆,在 卫星方面被用作高度计,测量地球及其表面的不平度。 •70年代,“丹麦眼镜蛇”雷达是一部又代表性的大型高分辨率 相控阵雷达,美国将该雷达用于观测,跟踪苏联勘查加半岛下 靶场上空的多个再入弹道导弹的弹头。
05.12.2020 7
一、雷达的任务
➢目标距离的测量 ➢目标方位和仰角的测量 ➢相对速度的测量 ➢目标尺寸和形状的测量 ➢目标形状的对称性 ➢目标的粗糙度和介电特性
05.12.2020 8
雷达介绍PPT课件
05.12.2020 10
三、雷达的发展历史
•1842年,奥地利物理学 家多卜勒——率先提出了 速度与音高关系的多卜勒 效应。
•1865英国物理学家 Maxwell ——描述了电磁 场理论
•1886德国物理学家 Hertz ——发现了电磁场 并证明了 Maxwell 的理论
05.12.2020 11
05.12.2020 9
二、雷达和无线电通信的比较
雷达与无线电通信的共同点: ➢二者的理论基础是一致的,都涉及到电路与系统、电磁场与微 波技术、信号与信息处理、计算机应用等学科; ➢电子系统大部分相似,都包括发射机,接收机,信号处理机等。
总体来说,雷达系统比通信系统要复杂得多;雷达对 信息获取的要求更高、难度更大;雷达的信号形式更 多,更复杂,信号处理更复杂。
三、雷达的发展历史
•60年代,电扫描相控阵天线。美国AN/SPS-33防空相控阵雷 达工作于S波段(2G~4GHz,10cm),方位机械扫描,仰角 电扫描。 •1964年,美国装置了第一个空间轨道监视雷达,用于监视人 造地球卫星或空间飞行器。 •60年代,NRL美国海军实验室研制成探测距离在3700km以 上的“麦德雷”高频超视距雷达,首先证明了超视距雷达探 测飞机,弹道导弹和舰艇的能力,还能确定海面状况和海洋 上空风情的能力。
05.12.2020 15
三、雷达的发展历史
•合成孔径雷达、相控阵雷达、脉冲多普勒雷达在70年代得到新 的发展。 •70年代中期,合成孔径雷达的计算机成像。装在卫星的合成孔 径雷达获得分辨率25×25m的雷达图像,1cm波段的机载合成 孔径雷达可以达到0.09m2的分辨率。 •70年代越南战争后期,出现用甚高频(VHF)雷达探测地下坑 道。 •空间应用方面,雷达用来帮助“阿波罗”飞船在月球着陆,在 卫星方面被用作高度计,测量地球及其表面的不平度。 •70年代,“丹麦眼镜蛇”雷达是一部又代表性的大型高分辨率 相控阵雷达,美国将该雷达用于观测,跟踪苏联勘查加半岛下 靶场上空的多个再入弹道导弹的弹头。
三、雷达的发展历史
•1842年,奥地利物理学 家多卜勒——率先提出了 速度与音高关系的多卜勒 效应。
•1865英国物理学家 Maxwell ——描述了电磁 场理论
•1886德国物理学家 Hertz ——发现了电磁场 并证明了 Maxwell 的理论
05.12.2020 11
05.12.2020 9
二、雷达和无线电通信的比较
雷达与无线电通信的共同点: ➢二者的理论基础是一致的,都涉及到电路与系统、电磁场与微 波技术、信号与信息处理、计算机应用等学科; ➢电子系统大部分相似,都包括发射机,接收机,信号处理机等。
总体来说,雷达系统比通信系统要复杂得多;雷达对 信息获取的要求更高、难度更大;雷达的信号形式更 多,更复杂,信号处理更复杂。
三、雷达的发展历史
•60年代,电扫描相控阵天线。美国AN/SPS-33防空相控阵雷 达工作于S波段(2G~4GHz,10cm),方位机械扫描,仰角 电扫描。 •1964年,美国装置了第一个空间轨道监视雷达,用于监视人 造地球卫星或空间飞行器。 •60年代,NRL美国海军实验室研制成探测距离在3700km以 上的“麦德雷”高频超视距雷达,首先证明了超视距雷达探 测飞机,弹道导弹和舰艇的能力,还能确定海面状况和海洋 上空风情的能力。
05.12.2020 15
三、雷达的发展历史
•合成孔径雷达、相控阵雷达、脉冲多普勒雷达在70年代得到新 的发展。 •70年代中期,合成孔径雷达的计算机成像。装在卫星的合成孔 径雷达获得分辨率25×25m的雷达图像,1cm波段的机载合成 孔径雷达可以达到0.09m2的分辨率。 •70年代越南战争后期,出现用甚高频(VHF)雷达探测地下坑 道。 •空间应用方面,雷达用来帮助“阿波罗”飞船在月球着陆,在 卫星方面被用作高度计,测量地球及其表面的不平度。 •70年代,“丹麦眼镜蛇”雷达是一部又代表性的大型高分辨率 相控阵雷达,美国将该雷达用于观测,跟踪苏联勘查加半岛下 靶场上空的多个再入弹道导弹的弹头。
雷达原理ppt课件68页PPT知识讲解

雷达对抗的重要性
取得军事优势的重要手段和保证
典型战例1:二次世界大战的诺曼地登陆,盟军 完全掌握了德军德40多不雷达的参数何配置, 通过干扰何轰炸,使德军雷达完全瘫痪。盟军 参战的2127艘舰船,只损失了6艘。 海湾战争:多国部队凭借高技术优势,在战争 的整个过程中使用了各种电子对抗手段,使伊 军的雷达无法工作、通信中断、指挥失灵。双 方人员损失为百人比数十万人。
电子战(EW)的含义
电子战是敌我双方利用电磁能和定向能破 坏敌方武器装备对电磁频谱、电磁信息 的利用或对敌方武器装备和人员进行攻 击、杀伤,同时保障己方武器装备效能 的正常发挥和人员的安全而采取的军事 行动。
电子战(EW)的含义
传统的电子战: 电子对抗(ECM),包括电子侦察、干扰、
隐身、摧毁。 电子反对抗(ECCM),包括电子反侦察、
先看几个著名的电子战经典战例:
——1982年6月9日,叙以贝卡谷地之战,以军一方面用 RC-707电子战飞机施放强烈电子干扰,同时用E-2"鹰眼" 空中预警机掩护导航,用"标准"和"狼"式反辐射导弹将叙 军苦心经营10年的19个导弹基地全部摧毁。
——1986年4月美军空袭利比亚。"软杀伤"与"硬摧 毁"手段紧密结合,双管齐下,仅仅12分钟就完成了代号 为"黄金峡谷"的军事行动,被称为"外科手术式"的攻击战, 使利比亚的防空体系毁于一旦。
处于抗干扰和反侦察地需要,许多雷达具有改变发射 信号的载波频率、脉冲重复频率、脉冲波形或者其它调 制参数,变化的时间可能在秒、毫秒甚至脉间。 信号威胁程度高、反应时间短
2)近年的分类方法
电子干扰
雷达原理介绍ppt课件

的射频信号进行下变频以转化为视频信号(即中心频率等
于0)。正交解调接收机即可完成这样的下变频处理:
sm(t) = s(t) exp(-j2 f0t) 可见,正交解调处理将信号的中心频率降低了 f0 。
|s( f )|
s(t)
sm(t)
正交解 调前
exp(-j2 f0t)
0 |sm( f )|
f0
f
正交解
基本原理
发射系统 接收系统
目标
将雷达的接收信号与发射信号进行比较,就可 以获得目标的位置、速度、形状等信息,根据这些 信息,雷达进而可以完成对目标的检测、跟踪、识 别等任务。
基本原理
发射信号:
Tp
t
Tr
雷达发射周期性脉冲,记脉冲宽度为 Tp,重复周期为 Tr,雷达峰值功率(即脉冲期间的平均功率)为Pt,雷达 平均功率(即周期内的平均功率)为Pav,工作比(即脉冲 宽度与重复周期之比)为D。显然有:
SNR = Ps / Pn 显然SNR越高,目标回波就越显著,就越有利于信号分析。
发射功率
不考虑各种损耗,影响目标回波峰值功率Ps的因素有:
雷达发射峰值功率Pt、目标的雷达截面积(RCS) 、目
标与雷达的相对距离R。它们之间存在关系:
Ps= Pt /R4 是与雷达系统及环境有关的常数。若 过小或R过大,则
Tp
t
响应的 3dB宽度称为雷 达距离分辨率,它表征 了雷达将相邻目标区分 开的能力。若接收机没 有脉冲压缩,可用发射
与雷达相距r的目标回波相对于发射脉冲 脉宽Tp近似距离分辨率;
的延时 = 2r / c,c为电磁波的传播速度。 若有脉冲压缩,分辨率
那么,与雷达的相对距离差为r的两个
雷达基本工作原理ppt课件

3 对方位分辨率和测方位精度的关系
工作波长越短,天线水平波束宽度越窄,方位分辨率和测方位进 度越高
4 抗杂波干扰能力的关系
工作波长越短,雨雪海浪等对雷达波德反射越强,干扰越大
29
5.2 脉冲宽度对使用性能影响
1 对最大作用距离的影响
脉冲宽度越大,能量越大,作用距离越大
2 对最小作用距离的关系
固定距标圈 荧光屏边缘
10
1.4 雷达的测距与测向原理
1. 雷达测距原理 Δ t: 往返于天线与目标的时间, C: 电磁波在空间传播速度3×108m/s。
R
=
1 C
×Δ
t
2
2. 雷达测向原理 借助于定向天线 - 扫描.
11
2 雷达基本组成
微波传输线 发射脉冲
发射机
天线
回波 T/R
触发器
接收机
电源
测 (2)
无视线限制
测量目标参数 距离,方位,速度,航向...
导航 (1) 避碰
(2) 定位
7
雷达/ARPA, ECDIS, GPS/DGPS和自动舵构成的自动 船桥系统是未来主要的导航系统
8
1.3雷达考核内容
雷达结构及其工作原理 雷达影像失真的特点及其产生原因 影响雷达正常观测的诸要素 雷达测距/测方位 雷达定位与导航 雷达航标
28
5.1 工作波长对使用性能影响
1 对最大作用距离的影响
正常天气观测较小的物标时,3cm雷达的rmax要比10cm的大 雨雪天,则10cm雷达的rmax要比3cm雷达的大得多
2 对距离分辨率和测距精度的关系
工作波长越短,脉冲前沿越短,测距精度高;脉冲前沿越短,有 利于缩短脉冲宽度,提高距离分辨率
工作波长越短,天线水平波束宽度越窄,方位分辨率和测方位进 度越高
4 抗杂波干扰能力的关系
工作波长越短,雨雪海浪等对雷达波德反射越强,干扰越大
29
5.2 脉冲宽度对使用性能影响
1 对最大作用距离的影响
脉冲宽度越大,能量越大,作用距离越大
2 对最小作用距离的关系
固定距标圈 荧光屏边缘
10
1.4 雷达的测距与测向原理
1. 雷达测距原理 Δ t: 往返于天线与目标的时间, C: 电磁波在空间传播速度3×108m/s。
R
=
1 C
×Δ
t
2
2. 雷达测向原理 借助于定向天线 - 扫描.
11
2 雷达基本组成
微波传输线 发射脉冲
发射机
天线
回波 T/R
触发器
接收机
电源
测 (2)
无视线限制
测量目标参数 距离,方位,速度,航向...
导航 (1) 避碰
(2) 定位
7
雷达/ARPA, ECDIS, GPS/DGPS和自动舵构成的自动 船桥系统是未来主要的导航系统
8
1.3雷达考核内容
雷达结构及其工作原理 雷达影像失真的特点及其产生原因 影响雷达正常观测的诸要素 雷达测距/测方位 雷达定位与导航 雷达航标
28
5.1 工作波长对使用性能影响
1 对最大作用距离的影响
正常天气观测较小的物标时,3cm雷达的rmax要比10cm的大 雨雪天,则10cm雷达的rmax要比3cm雷达的大得多
2 对距离分辨率和测距精度的关系
工作波长越短,脉冲前沿越短,测距精度高;脉冲前沿越短,有 利于缩短脉冲宽度,提高距离分辨率
《雷达基本工作原理》PPT课件(2024)
雷达抗干扰与隐身技术探讨
2024/1/28
15
常见干扰类型及抗干扰措施
有源干扰
通过发射与雷达信号相似的干扰信号,使雷达难以区分目标 回波和干扰信号。
2024/1/28
无源干扰
利用反射、散射等方式,使雷达信号偏离目标或产生虚假目 标。
16
常见干扰类型及抗干扰措施
01
02
03
信号处理技术
采用先进的信号处理技术 ,如脉冲压缩、动目标检 测等,提高雷达抗干扰能 力。
2024/1/28
雷达定义
利用电磁波的反射原理进行目标 探测和定位的电子设备。
发展历程
从20世纪初的萌芽阶段到二战期 间的广泛应用,再到现代雷达技 术的不断创新和发展。
4
雷达应用领域及重要性
应用领域
军事、民用航空、气象、海洋监测、 地质勘探等。
重要性
在各个领域发挥着不可替代的作用, 如保障国家安全、提高航空安全、预 测天气变化等。
强化信号处理部分
信号处理是雷达技术的核心,建议增加相关 课时和实验,深入讲解信号处理技术。
2024/1/28
33
课程安排建议和拓展学习资源推荐
• 引入新技术:随着科技的发展,新型雷达技术不断涌现,建议课程中加入新型雷达技术的介绍和 讨论。
2024/1/28
34
课程安排建议和拓展学习资源推荐
2024/1/28
02
在安检、反恐、生物医学等领域 具有潜在应用价值。
2024/1/28
30
06
总结回顾与课程安排建议
2024/1/28
31
关键知识点总结回顾
雷达基本概念
雷达是一种利用电磁波进行探测和测 距的电子设备,广泛应用于军事、民 用等领域。
雷达原理ppt课件68页PPT知识讲解70页PPT
文 家 。汉 族 ,东 晋 浔阳 柴桑 人 (今 江西 九江 ) 。曾 做过 几 年小 官, 后辞 官 回家 ,从 此 隐居 ,田 园生 活 是陶 渊明 诗 的主 要题 材, 相 关作 品有 《饮 酒 》 、 《 归 园 田 居 》 、 《 桃花 源 记 》 、 《 五 柳先 生 传 》 、 《 归 去来 兮 辞 》 等 。
雷达原理ppt课件68页PPT知识讲解
6
、
露
凝
无
游
氛
,
天
高
风
景
澈
。
7、翩翩新 来燕,双双入我庐 ,先巢故尚在,相 将
后
名
,
于
我
若
浮
烟
。
9、 陶渊 明( 约 365年 —427年 ),字 元亮, (又 一说名 潜,字 渊明 )号五 柳先生 ,私 谥“靖 节”, 东晋 末期南 朝宋初 期诗 人、文 学家、 辞赋 家、散
1
0
、
倚
南
窗
以
寄
傲
,
审
容
膝
之
易
安
。
1、最灵繁的人也看不见自己的背脊。——非洲 2、最困难的事情就是认识自己。——希腊 3、有勇气承担命运这才是英雄好汉。——黑塞 4、与肝胆人共事,无字句处读书。——周恩来 5、阅读使人充实,会谈使人敏捷,写作使人精确。——培根
《雷达导论概论》课件

工作原理
雷达通过发射机产生高频电磁波,经过天线辐射到空间中,遇到目标后反射回 来,被雷达天线接收并传输给接收机进行处理,最终形成目标图像或数据。
雷达的分类
脉冲雷达
连续波雷达
通过发射脉冲信号进行探测,根据回波信 号的延迟时间确定目标距离,具有较高的 距离分辨率。
发射连续的电磁波,通过测量电磁波在空 间中的传播时间来确定目标距离,具有较 高的速度分辨率。
气象观测
雷达能够探测气象目标,如降水、风速、风向 等,为气象预报提供数据支持。
资源探测
雷达可用于地质勘探和资源探测,发现地下矿藏和资源分布。
未来雷达技术的发展趋势
隐身技术
随着反雷达技术的发展,雷达隐身技术将更加重要,提高雷达的生 存能力。
高频、超宽带技术
高频和超宽带雷达具有更高的分辨率和更强的抗干扰能力,是未来 发展的重要方向。
交通运输
雷达在交通运输领域中用于车辆自动驾驶、交通流量监测 、航道监测等方面,可以提高交通运输的安全性和效率。
航空航天
雷达在航空航天领域中用于导航、气象观测、地形测绘、 卫星轨道测量等方面,对于航空航天技术的发展具有重要 意义。
气象观测
雷达在气象观测领域中用于降水、风速、云层等方面的观 测和预报,对于气象研究和灾害预警具有重要作用。
合成孔径雷达
相控阵雷达
利用高速运动平台产生的多普勒效应,将 较小尺寸的天线等效为大面积天线,提高 雷达的方位分辨率。
通过控制阵列天线中各个辐射单元的相位 和幅度,实现雷达波束的扫描和跟踪,具 有多功能和高机动性。
雷达的应用领域
军事应用
雷达在军事领域中广泛应用于目标探测、跟踪、火控、制 导等方面,是现代战争中不可或缺的重要装备。
雷达通过发射机产生高频电磁波,经过天线辐射到空间中,遇到目标后反射回 来,被雷达天线接收并传输给接收机进行处理,最终形成目标图像或数据。
雷达的分类
脉冲雷达
连续波雷达
通过发射脉冲信号进行探测,根据回波信 号的延迟时间确定目标距离,具有较高的 距离分辨率。
发射连续的电磁波,通过测量电磁波在空 间中的传播时间来确定目标距离,具有较 高的速度分辨率。
气象观测
雷达能够探测气象目标,如降水、风速、风向 等,为气象预报提供数据支持。
资源探测
雷达可用于地质勘探和资源探测,发现地下矿藏和资源分布。
未来雷达技术的发展趋势
隐身技术
随着反雷达技术的发展,雷达隐身技术将更加重要,提高雷达的生 存能力。
高频、超宽带技术
高频和超宽带雷达具有更高的分辨率和更强的抗干扰能力,是未来 发展的重要方向。
交通运输
雷达在交通运输领域中用于车辆自动驾驶、交通流量监测 、航道监测等方面,可以提高交通运输的安全性和效率。
航空航天
雷达在航空航天领域中用于导航、气象观测、地形测绘、 卫星轨道测量等方面,对于航空航天技术的发展具有重要 意义。
气象观测
雷达在气象观测领域中用于降水、风速、云层等方面的观 测和预报,对于气象研究和灾害预警具有重要作用。
合成孔径雷达
相控阵雷达
利用高速运动平台产生的多普勒效应,将 较小尺寸的天线等效为大面积天线,提高 雷达的方位分辨率。
通过控制阵列天线中各个辐射单元的相位 和幅度,实现雷达波束的扫描和跟踪,具 有多功能和高机动性。
雷达的应用领域
军事应用
雷达在军事领域中广泛应用于目标探测、跟踪、火控、制 导等方面,是现代战争中不可或缺的重要装备。
雷达操作演示幻灯片
5.脉冲宽度按选择开关(PULSE LENGTH SELECTOR) 该控钮用来选择发射脉冲的脉冲宽度,以适应远、
近量程不同的使用要求,一般设有2-3种宽度。有部分雷 达不单独设次开关,由量程开关同轴转换。在转换脉冲 宽度的同时,也转换了通频带宽度
6
第一节 船用雷达的主要控钮
三、抑制杂波的控钮
1.海浪干扰抑制(STC/SEA/ANTI-CLUTTER SEA) 该控钮用来调整一个随时间按指数规律变化的脉冲电
的一个微分电路FTC,将宽回波视频信号微分变窄,突 出了回波的前沿,以此抑制雨雪等大片连续干扰回波。 注意:使用该控钮时突出了目标的前沿,但微分处理同 时也削弱了目标回波,因此该控钮在雨雪天要酌情调节, 达到既去除雨雪干扰杂波,又不丢失雨雪中物标回波的 效果。
9
第一节 船用雷达的主要控钮
4.极化选择开关(POLARIZATION) 该控钮用于选择雷达天线发射波的极化类型,一
关小 3.雾航、夜航等情况下频繁使用雷达时,暂时不用只关
高压 4.发射前必须预热 3 分钟,紧迫情况可用“紧急”开关,
但尽量少用 5.正确使用和调节各种控钮,以获得最佳雷达图像
24
2
第一节 船用雷达的主要控钮
两档开关(POWER/TRANSMIT) 三档开关(OFF/STAND-BY/ON) 1)关(OFF):整个电源切断 2)预备(STAND-BY):各分机低压电源供电,发射机
的特高压电源除外,该档位需停留3-5min,给发射机 的磁控管阴极预热 3)发射(ON):磁控管充分预热后,开关置于ON档, 此时发射机加上特高压,开始发射。 注意:短时间不用雷达时,将开关置于STAND-BY档, 延长磁控管寿命
第四章 船用雷达的操作安装维护
近量程不同的使用要求,一般设有2-3种宽度。有部分雷 达不单独设次开关,由量程开关同轴转换。在转换脉冲 宽度的同时,也转换了通频带宽度
6
第一节 船用雷达的主要控钮
三、抑制杂波的控钮
1.海浪干扰抑制(STC/SEA/ANTI-CLUTTER SEA) 该控钮用来调整一个随时间按指数规律变化的脉冲电
的一个微分电路FTC,将宽回波视频信号微分变窄,突 出了回波的前沿,以此抑制雨雪等大片连续干扰回波。 注意:使用该控钮时突出了目标的前沿,但微分处理同 时也削弱了目标回波,因此该控钮在雨雪天要酌情调节, 达到既去除雨雪干扰杂波,又不丢失雨雪中物标回波的 效果。
9
第一节 船用雷达的主要控钮
4.极化选择开关(POLARIZATION) 该控钮用于选择雷达天线发射波的极化类型,一
关小 3.雾航、夜航等情况下频繁使用雷达时,暂时不用只关
高压 4.发射前必须预热 3 分钟,紧迫情况可用“紧急”开关,
但尽量少用 5.正确使用和调节各种控钮,以获得最佳雷达图像
24
2
第一节 船用雷达的主要控钮
两档开关(POWER/TRANSMIT) 三档开关(OFF/STAND-BY/ON) 1)关(OFF):整个电源切断 2)预备(STAND-BY):各分机低压电源供电,发射机
的特高压电源除外,该档位需停留3-5min,给发射机 的磁控管阴极预热 3)发射(ON):磁控管充分预热后,开关置于ON档, 此时发射机加上特高压,开始发射。 注意:短时间不用雷达时,将开关置于STAND-BY档, 延长磁控管寿命
第四章 船用雷达的操作安装维护
雷达一些基本原理ppt课件

雷达方程的推导过程
通过电磁波传播、目标反射、接收处理等过程,推导出雷达方程的 具体形式。
雷达方程的意义
为雷达系统设计、性能分析和优化提供了理论依据,有助于指导雷 达系统的实际应用。
最小可检测信号计算
最小可检测信号的定义
在给定虚警概率和检测概率条件下,雷达系统能够检测到的最小 目标回波信号。
最小可检测信号的计算方法
根据雷达方程和噪声特性,通过理论计算或仿真实验确定最小可检 测信号的大小。
影响最小可检测信号的因素
包括雷达系统参数、目标特性、传播环境等,需要综合考虑各种因 素进行优化设计。
系统性能评估指标
探测距离
衡量雷达系统对远距离目标的 探测能力,与发射功率、天线 增益、目标反射截面等因素有
关。
分辨率
表征雷达系统区分相邻目标的 能力,包括距离分辨率、方位 分辨率和俯仰分辨率等。
02
电磁波与天线
电磁波特性与传播方式
电磁波基本特性
电磁波是一种横波,具有电场和 磁场分量,可以在真空中传播,
速度等于光速。
电磁波谱
电磁波谱包括无线电波、微波、红 外线、可见光、紫外线、X射线和 伽马射线等,不同波段的电磁波具 有不同的特性。
电磁波传播方式
电磁波传播方式包括直射、反射、 折射、衍射和散射等,这些传播方 式决定了雷达探测的基本原理。
雷达一些基本原理ppt课件
目录
பைடு நூலகம்
• 雷达概述 • 电磁波与天线 • 雷达信号处理 • 雷达测距测速原理 • 雷达方程与性能分析 • 现代雷达技术发展趋势
01
雷达概述
雷达定义与发展历程
雷达定义
利用电磁波的反射特性来探测目 标的位置、速度等信息的电子设 备。
通过电磁波传播、目标反射、接收处理等过程,推导出雷达方程的 具体形式。
雷达方程的意义
为雷达系统设计、性能分析和优化提供了理论依据,有助于指导雷 达系统的实际应用。
最小可检测信号计算
最小可检测信号的定义
在给定虚警概率和检测概率条件下,雷达系统能够检测到的最小 目标回波信号。
最小可检测信号的计算方法
根据雷达方程和噪声特性,通过理论计算或仿真实验确定最小可检 测信号的大小。
影响最小可检测信号的因素
包括雷达系统参数、目标特性、传播环境等,需要综合考虑各种因 素进行优化设计。
系统性能评估指标
探测距离
衡量雷达系统对远距离目标的 探测能力,与发射功率、天线 增益、目标反射截面等因素有
关。
分辨率
表征雷达系统区分相邻目标的 能力,包括距离分辨率、方位 分辨率和俯仰分辨率等。
02
电磁波与天线
电磁波特性与传播方式
电磁波基本特性
电磁波是一种横波,具有电场和 磁场分量,可以在真空中传播,
速度等于光速。
电磁波谱
电磁波谱包括无线电波、微波、红 外线、可见光、紫外线、X射线和 伽马射线等,不同波段的电磁波具 有不同的特性。
电磁波传播方式
电磁波传播方式包括直射、反射、 折射、衍射和散射等,这些传播方 式决定了雷达探测的基本原理。
雷达一些基本原理ppt课件
目录
பைடு நூலகம்
• 雷达概述 • 电磁波与天线 • 雷达信号处理 • 雷达测距测速原理 • 雷达方程与性能分析 • 现代雷达技术发展趋势
01
雷达概述
雷达定义与发展历程
雷达定义
利用电磁波的反射特性来探测目 标的位置、速度等信息的电子设 备。
雷达原理ppt课件

l 波形条件――信号调制参数在侦察设备的检 测能力之内。
雷达干扰的基本原理
雷达发射
传播
目标
雷达接收
空间
干扰机
雷达干扰的机理和途径:
l 破坏电波传播路径
l 产生干扰信号进入雷达接收机,破坏 目标检测
l 减小目标的雷达截面积
雷达对抗的主要技术特点
1) 宽频带、大视场 雷达侦察系统的频率覆盖范围为:10~40GHz, 75~140GHz 具备陆、海、空、天全空域、全方位、全高度 的对抗能力 2) 瞬时信号检测、测量和高速信号处理 适应传统脉冲雷达、捷变频雷达、低辐射雷达 信号的检测与识别能力,对雷达参数的测量实时 完成,信号的处理必须是高速实现。
雷达干扰的分类
按作用原理分 遮盖性干扰
在雷达接收机中,干扰与目标回波叠 加在一起,使雷达难以从中检测目标信 息。 欺骗性干扰 在雷达接收机中,干扰与目标回波难以 区分,以假乱真,使雷达不能正确检测 目标信息。
雷达干扰的分类
按雷达、目标、干扰机相对位置分
远距离支援干扰(SOJ),干扰机远离目标,通过 辐射强干扰信号掩护目标,一般为遮盖性干扰,干 扰雷达旁瓣。
雷达 侦察 设备
干扰 决策
资源 管理
干扰 资源库
功率 合成
波束 形成
国外电子战装备技术发展现状与趋势
由于美国是当今世界最发达国家,其技术水平 代表了当今世界的最高水平,因此这里重点介绍 有关美国的电子战装备技术的发展现状与趋势。
美军“2010年联合设想”是其确定其装备技术 发展方向和未来高技术作战的基本出发点。以信 息技术为核心的高技术迅猛发展而引发的这场新 军事革命,将改变21世纪初叶的战场格局,并给 未来高技术局部战争带来深刻而深远的影响。为 了赢得高技术战争,迎接和推动新军事革命,美 国军方提出了“2010年联合设想”,为其武装部 队的发展,提供了作战标准,成为其三军设想的 基础。
雷达(幻灯片)(04)
一、影响因素(P79) 1 方位同步系统误差
第七节 测方位精度及其影响因素 (Bearing Accuracy)
边沿 扫描方向
扫描起点 (本船) O
真实距离 测量距离
岛 A
(c) 雷达图像
扫描线 C
CRT边缘
二、海面镜面反射(Sea Mirror Reflecton)的影响(P73)
r’max=2rmaxsin[(2πH1H2)/(rmaxλ)] 1)垂直波束分裂,低空目标时隐时现
2)r’max有时为零,有时为2rmax 3)最低波瓣离开海面,仰角θ=λ/(4H1) `
二、标准
利用固定距标圈和活动距标圈测量物标距离,
误差不能超过所用量程最大距离的1.5%或者70米 中较大的一个值。实际的测距误差还与干扰杂波 的强度、海况及使用者的技术有关。
三、操作注意(P79): 1)调节好控钮 2)选好合适量程 3)核实测距装置精度 4)选择合适切点 5)选择合适顺序 6)选用宽的Δf、窄的τ 7)选择合适的目标
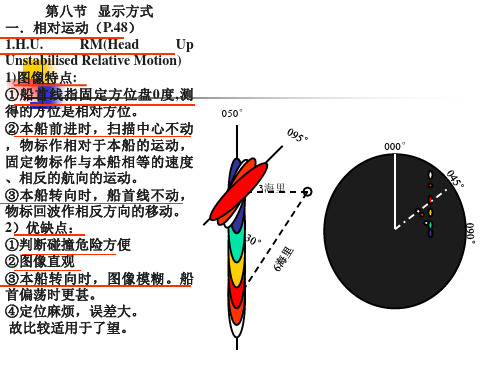
第八节 显示方式 一.相对运动(P.48)
1.H.U. RM(Head Up
Unstabilised Relative Motion) 1)图像特点: ①船首线指固定方位盘0度,测 得的方位是相对方位。
②本船前进时,扫描中心不动 ,物标作相对于本船的运动, 固定物标作与本船相等的速度 、相反的航向的运动。
t (Minimum Range)
r 1、定义(P75):雷达清晰显示回波τ 的最近距离
2、影响它的因素 rmin1=c(τ+tr)/2
rmin2=hActgφ/2≈hActgkθv 弱回波时可为hActg(θv/2) 3、标准:
R
min1
《雷达操作》幻灯片

第一节 控钮符号作用及操作要点
三、有关杂波抑制的控钮
1.海浪干扰抑制〔Anti-Clutter Sea 或 Sea-Echo Suppression〕:
〔Sencitivity Time Contor——STC〕 6 ~ 8 n mile 2.雨雪干扰抑制〔Anti-Clutter Rain/Snow〕 :
distortion is inevitable.
EBL
Ring (6 Total)
Fig. Range & bearing measurement
Range: 12 nm
180 Radar
picture
Periphery of CRT
第四章 船用雷达的操作
第四章 船用雷达的操作
第一节 控钮符号作用及操作要点
一、有关电源的开关
1.船电闸刀〔Ships Power Switch〕:合上驱潮、维 护断开 2.雷达开关〔Radar Power Switch〕 :Off-Stand-
二、O3.n天有线关开图关象〔质Sc量an的ne控r P钮ower 或 Antenna Power 〕:
一1.亮般度无〔Brilliance Tube 或 Intensity Sweep〕:扫描 线刚好看不见 2.调谐〔Tuning 或 Tune〕:1〕指示最大;2〕图象最 饱满、清晰 3.增益〔Gain 或 Sensitivity〕:噪声斑点刚好可见 4.脉冲宽度〔Pulse Length Selector〕:选择长、中、
90°
Own ship
Target 245°
Island
Chart
270
form
Δt=123.5μs 0 Scan direction
三、有关杂波抑制的控钮
1.海浪干扰抑制〔Anti-Clutter Sea 或 Sea-Echo Suppression〕:
〔Sencitivity Time Contor——STC〕 6 ~ 8 n mile 2.雨雪干扰抑制〔Anti-Clutter Rain/Snow〕 :
distortion is inevitable.
EBL
Ring (6 Total)
Fig. Range & bearing measurement
Range: 12 nm
180 Radar
picture
Periphery of CRT
第四章 船用雷达的操作
第四章 船用雷达的操作
第一节 控钮符号作用及操作要点
一、有关电源的开关
1.船电闸刀〔Ships Power Switch〕:合上驱潮、维 护断开 2.雷达开关〔Radar Power Switch〕 :Off-Stand-
二、O3.n天有线关开图关象〔质Sc量an的ne控r P钮ower 或 Antenna Power 〕:
一1.亮般度无〔Brilliance Tube 或 Intensity Sweep〕:扫描 线刚好看不见 2.调谐〔Tuning 或 Tune〕:1〕指示最大;2〕图象最 饱满、清晰 3.增益〔Gain 或 Sensitivity〕:噪声斑点刚好可见 4.脉冲宽度〔Pulse Length Selector〕:选择长、中、
90°
Own ship
Target 245°
Island
Chart
270
form
Δt=123.5μs 0 Scan direction
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
095° 000° 050°
3海里
050°
000°
2.真运动显示方式(P.52) 1)N.U. T.M(North_UP True Motion): 2)对水稳定真运动(Sea Stabilization True Motion): (适用于避碰) 3)对地稳定真运动(Ground Stabilization True Motion):(适用于导航)
第八节 显示方式 一.相对运动(P.48) 1.H.U. RM(Head Up Unstabilised Relative Motion) 1)图像特点: ①船首线指固定方位盘0度,测 得的方位是相对方位。 ②本船前进时,扫描中心不动 ,物标作相对于本船的运动, 固定物标作与本船相等的速度 、相反的航向的运动。 ③本船转向时,船首线不动, 物标回波作相反方向的移动。 2)优缺点: ①判断碰撞危险方便 ②图像直观 ③本船转向时,图像模糊。船 首偏荡时更甚。 ④定位麻烦,误差大。 故比较适用于了望。
1)垂直波束分裂,低空目标时隐时现 2)r’max有时为零,有时为2rmax 3)最低波瓣离开海面,仰角θ=λ/(4H1) `
三、海浪干扰(Sea Clutter)(P73) 1)特点: ①近时强,距离增加时以1/r4 减弱,一般为6~8海里, 大时达10海里。 ②上风舷强,远。 ③一般为扫描中心附近鱼鳞状亮斑,大风浪呈亮盘。 长涌为条状回波。 ④强度还与雷达技术指标有关: a:λ b:入射角 c:极化类型 d:τ、θh 2)影响:影响近距物标回波显示, 过强还会引起接收机过载。 3)抑制方法:STC、CFAR、对数 放大器、10厘米波段,高速天线、 窄脉冲宽度。
二 . 真 运 动 ( T.M ) (True Motion)雷达 及显示方式(P.51) 1.真运动雷达原理 1)扫描中心移动原理: 2)解算装置: 3)中心重调: 4)速度输入: ①速度输入源:LOG、 手动模拟、GPS等导航仪 ②速度与量程的关系: 5)航向输入: 6)航迹校正: (校正好坏的判断方法;)
050°
000°
3海里
2.N.U. RM(North_UP Stabilised Relative Motion)(P.49) 1)图像特点: ①固定方位盘0度代表北,船首线指 航向值。测得的方位是真方位。 ②本船前进时,扫描中心不动,物 标作相对于本船的运动,固定物标 作与本船相等的速度、相反的航向 的运动。 ③本船转向时,图像不动,船首线 移向新航向。 2)优缺点: ①判断碰撞危险方便 ②本船转向时,图像稳定、清晰。 特别在船首偏荡时,优点更为突出 。 ③定位方便、速度快、误差小。 ④航向在0900—2700之间,特别在 1800时,易搞错左右舷,对避碰不 利。 故比较适用于定位及导航。
三.输入航向、速度误差对各种显示数据的影响 (参考《雷达观测》P.71—74) 1航向误差的影响 1)对H.U RM :无影响 2)对N.U RM; C.U RM: (相对方位无影响; 真方位则有相同的误差) 3)对N.U TM:有影响: ①船首线的指向有误差, 扫描中心的移动轨迹有误差。 ②回波的相对方位无影响; 真方位有相同的误差。
2.速度误差的影响 1)对H.U RM、N.U RM、C.U RM:无影响 2)对T.M有影响: 输入太快:固定物标回波随扫描中心前移 输入太慢:固定物标回波后移(与扫描中心移动方向相反)
第九节 双雷达系统及性能监示器 一.双雷达系统及互换装置(P.53) 1.双雷达系统 2.双雷达系统互换装置 (Interswitching unit;Radar Selector) 3.操作注意事项 4.优点
正常
不正常 不正常
不正常
正常 不正常
第三章 雷达使用性能及其影响因素 第一节 最大探测距离及其影响因素 1.最大探测距离(P.67) (1)雷达地平(Radar Horizon) :在标准大气状况下,仅考虑地球 曲率及大气折射时雷达的最大探测距离 DR =2.23√h (2)雷达最大探测距离: 考虑地球曲率、天线和物标高度及雷达 波传播空间大气折射影响时的雷达可能观测的最大距离,又称“极 限距离”: Rmax=2.23(√H1 +√H2) (海里) 式中:H1米:天线在海面上的高度;H2:物标在海面上的高度 说明:“最大作用距离”是雷达屏上清晰显示物标回波的最大距离 几何地平 1.93 。
tr
R
C (t + t ) r min1 2
R
min1
…………
最小探测距离 一般来说, Rmin1 和 Rmin2不同, 选二者中 的较大值作为最小作 用距离。
θH
零发射线
半功率点线 最小探测距由天线高度和 垂直波束宽度决定
R
min2
Rmin2 = H· ctg(θ v/2)
第四节
距离分辨率及其影响 (Range Discrimination)因素
第六节 测距精度及其影响因素 (Range Accuracy) 一、影响因素(P78) 1、同步误差: 2、测距装置不精确 3、扫描锯齿波非线性(内插时引起) 4、τ、Δf、d引起的图像扩展 5、物标回波闪烁引起 6、天线高度引起 7、操作技术引起(切点、顺序) 8、其他因素:如C不稳等
二、标准 利用固定距标圈和活动距标圈测量物标距离, 误差不能超过所用量程最大距离的1.5%或者70米 中较大的一个值。实际的测距误差还与干扰杂波 的强度、海况及使用者的技术有关。 三、操作注意(P79): 1)调节好控钮 2)选好合适量程 3)核实测距装置精度 4)选择合适切点 5)选择合适顺序 6)选用宽的Δf、窄的τ 7)选择合适的目标
第五节
方位分辨率及其影响因素(P77) (Bearing Discrimination)
1 定义(P77):雷达区分等距离上两个相邻物标的能力,用可分 开显示的等距离上两个相邻物标的最小方位夹角表示。 2 影响因素
如 则 Δ α° min= θ°H +d°=θ°H+57.3(d/D)(2LS /L) θ°H=1°,D/d=400 L= LS /3时, d°=θ°, Δα°min≈2θ°H L<< LS /3时,d°>>θ°, Δα°min≈d°>θ°H θ L>2 LS /3时,d°<<θ°, Δα°min≈θ°H 显示的最小方位间隔应不大于2.
4.辐射功率监视器 (Radiated Power Monitor) 1)结构、原理 2)监视对像 3)图像及判断方法 5.3、4的综合判断方法 表1—2—5 测试结果
太阳亮盘 正常 羽毛状图 正常
分析结果
整个设备工作正常
收发机正常但在波导和/或天线中有损耗 接收机性能降低了 收发机性能降低,或波导和/或天线性能下降, 或显示器视频放大器性能下降
H
1). 水平波束宽度。
方位分辨率
2). 荧光屏和光点尺寸。 3、操作注意(P78):
方位相同距离不同
1)减小θ°H 2)聚焦要好 3)准确选择小量程,使回波处于2/3量程附近。 θ H 4)选购小d大D的CRT 5)适当减小亮度、增益等:可使Δα°min≈ (0.6~0.7)θ°H 角向肥大 4、标准:雷达用1.5海里或2海里量程时在量程 50%~100%的距离范围内(即LS/2~ LS)观测两 个等距离的相邻点物标。它们能分开5°。
④工作波长: 尺寸<<λ: 尺寸>>λ: 实际物标有效散射面积很难用上式计算
目 标 小型货船
中型货船 大型货船 拖网渔船 快 艇 有效散射面积 (m2)
目
标
有效散射面积 (m2)
1.4×102
7.4×103 1.5×104 750 100
潜艇(在水面)
小型运输舰 中型运输舰 大型运输舰 巡洋舰
37~140
四、大气衰减(Atmospheric Attenuation)(P74) 主要由水汽、氧气引起,氧气对3~10厘米波影响一样。 1)水汽:3厘米强 2)雨滴大小及密度: 3)雾:一般影响较小,30米的浓雾影 响较中雨大,但回波一般看不见。 4)云、雨雪:除衰减外,还产生干扰 回波。
五、标准: 在正常电波传播条件下,雷达天线高出水面15米,且无 杂波干扰,应能清楚显示各种物标的距离。如下表:
光学地平 2.07
h1
天线雷达地平 目标雷达地平
雷达地平 2.23
h2 雷达地平和雷达最大探测距离
2.异常传播(P68) 1)次折射(Sub_refraction)(负折射、欠折射)(P.68) ①产生条件: ②产生的影响: ③易发生的地区: 2)超折射(Supper_refraction) (过折射)(P.69) ①产生条件: ②产生的影响: ③易发生的地区: 3)大气波导(Atmosphere Duct) (Surface Duct and Elevated Duct)
第二节 最大作用距离及其影响因数 一.雷达技术参数及物标反射性能(P.69) 1.雷达技术参数 (P.69)(雷达在自由空间的最大作用距离) :
2 rMAX 4 ( PT G A 0 2 ) /(64 3 Pr min )
说明各参数的影响 2.物标有效散射面积σ0的影响 1) 物标有效散射面积σ0定义: 2)影响物标有效散射面积σ0的因素 ①物标尺寸:宽: 高: 深: ②形状、表面结构,入射波方向(视角) 光滑表面: 粗糙表面: 形状: ③材料:
1、定义(P76): 2、影响因素: Δrmin=C(τ+1/Δf)/2+2RD(d/D) 式中: C:电波传播速度;τ:发射脉冲宽度; Δf:接收机通频带 ; d:光点直径; D:屏幕直径; RD:所用量程距离 3 、操作注意(P76): 1 ) 选 用 窄 的 脉 冲 宽 度 ( 在 小 RD 时 机 器 自 动 选 择 ) 、 2)宽Δf(在小RD时机器自 距离分辨率 A B 动选择) 3)选用小RD 荧 4)聚焦要好 光 5)选购小d大D的即高分辨 屏 边 率的CRT 光通 真 脉 通 光 缘 4、标准:用2海里或更小量 点 带 实 冲 带 点 程档,在量程50%~100距离 半 宽 目 宽 宽 半 经度 标 度 度 经 范围内观测两个同方位的相 距离分辨率 邻小物标,它们能分开显示 的最小间距应不大于50米。