风速传感器产品说明书
风速测量仪操作指南说明书
风速测量仪操作指南说明书一、产品概述风速测量仪是一种精密的仪器,用于测量风速及其相关参数。
它可以帮助用户准确了解风速,进行风能资源评估、环境监测、气象观测等工作。
本操作指南旨在为用户提供清晰的操作说明,以确保正确地使用风速测量仪并获得准确的测量结果。
二、仪器结构与部件介绍1. 仪器结构:风速测量仪包括主机、传感器和显示屏等组成部分。
主机为仪器的核心部分,负责控制、接收和处理测量数据;传感器负责采集风速及其它参数的变化;显示屏用于显示测量结果和操作菜单。
2. 主机操作面板:主机的操作面板上配有开关、功能键和数字键。
开关用于开启和关闭仪器;功能键用于切换功能模式;数字键用于输入参数或选择菜单。
3. 传感器:传感器一般由组合风向风速传感器和温湿度传感器组成。
组合风向风速传感器用于测量风向和风速;温湿度传感器用于测量环境温度和湿度。
三、操作步骤1. 开机准备:连接传感器与主机,并确保传感器与主机连接牢固。
检查电源是否正常,确保电量充足。
同时检查仪器和传感器表面是否清洁,确认传感器无遮挡物。
2. 仪器校准:正确校准仪器,以确保测量的准确性。
校准过程可参照仪器附带的校准手册进行操作,并根据实际需求选择合适的校准参数。
3. 功能选择:根据实际需要,选择仪器的功能模式。
通过操作面板上的功能键,可切换不同的功能模式。
常用的功能包括风速测量、风向测量、温度测量等。
4. 参数设置:根据实际需求,设置相应的测量参数。
通过数字键输入相应的数值,并按确认键进行保存。
常用的参数包括测量单位、采样间隔、数据存储容量等。
5. 数据测量:根据需要,进行数据测量过程。
确保仪器处于稳定状态后,按下测量键开始测量。
测量过程中,可通过显示屏实时查看测量结果。
6. 数据存储与导出:仪器具备数据存储功能,可将测量结果保存在内部存储器或者外部存储卡中。
根据需要,将数据导出到计算机或其它设备进行进一步分析。
四、注意事项1. 操作前请仔细阅读说明书,确保对仪器的使用方法有所了解。
FA13B风速仪WindSpeedSensor-南华机电
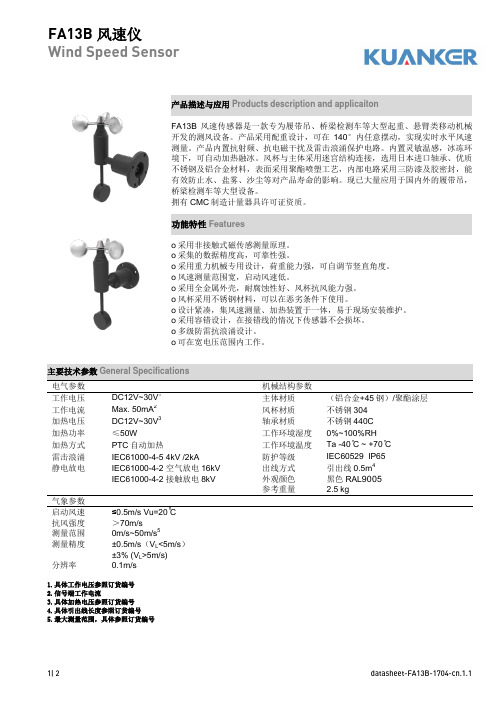
主要技术参数 General Specifications
电气参数 工作电压 工作电流 加热电压 加热功率 加热方式 雷击浪涌 静电放电
DC12V~30V1 Max. 50mA2 DC12V~30V3
≤50W PTC 自动加热 IEC61000-4-5 4kV /2kA IEC61000-4-2 空气放电 16kV IEC61000-4-2 接触放电 8kV
机械结构参数 主体材质 风杯材质 轴承材质 工作环境湿度 工作环境温度 防护等级 出线方式 外观颜色 参考重量
(铝合金+45 钢)/聚酯涂层
不锈钢 304 不锈钢 440C 0%~100%RH
Ta -40 ̊C ~ +70 ̊C IEC60529 IP65 引出线 0.5m4 黑色 RAL9005 2.5 kg
0 5 10 15 20 25 30 35 40 45 50 55 60
1. 传感器只传送数据,不接收数据。以低波特率传输,传输距离可达到 200m。
2. 因硬件层较特殊,必须连接 FA101C 显示器使用。
订货编号 How to Order
产品编号
型号 电压
1000060-002 FA13B DC12V-DC30V
4-20mA 电流输出,0-50m/s
不带加热功能
4-20mA 电流输出,0-50m/s
带加热功能(≤50W)
出线方式 自配重,直接引出 5 芯线 (线长 3 米) 自配重,直接引出 5 芯线 (线长 3 米) 自配重,直接引出 3 芯线 (线长 3 米) 自配重,直接引出 5 芯线 (线长 3 米)
气象参数 启动风速 抗风强度 测量范围 测量精度
分辨率
≤0.5m/s Vu=20 ̊C >70m/s 0m/s~50m/s5
风速仪使用说明
一,概述本仪器为便携设计的三杯式风向风速仪,仪器测量部分采用了单片机技术,可以同时测量瞬时风速、瞬时风级平均风速、平均风级和对应浪高等参数。
它带有数据锁存功能,便于读数。
风向部分采用了自动指北装置,测量时无需人工对北,简化测量操作。
本仪器为精密仪器,配备高级铝合金手提仪器箱,为仪器提供良好保护,同时便于携带。
本仪器体积小,重量轻,功能全,耗电省,字符大,显示直观,可广泛用于农林、环保、海洋、科学考察等领域测量大气的风参数。
二,工作原理简介1,风向部分:风向部分由保护风向度盘的回弹顶杆所支撑。
整体结构由风向标,风向轴及风向度盘等组成,装在风向盘上的磁棒与风向度盘组成磁罗盘来确定风向方位。
当下锁定旋钮并向右旋转定位时,回弹顶杆将风向度盘放下,使锥形宝石轴承与轴尖相接触,此时风向度盘将自动定北。
风向示值由风向指针在风向度盘上的稳定位置来确定。
当左旋转锁定旋钮并使用其向上回弹复位时,回弹顶杆将风向度盘顶起并定位在仪器上部,并使锥形宝石轴承与轴尖相分离,以保护风向度盘及轴承与轴尖不受损坏(注:当仪器使用完毕后必须及时回复些状态)2、风速部分:风速传感器采用传统的三杯旋转架结构,它将风速变换成旋转架的转速。
为了减小启动风速,采用特殊材料的轻质风杯和宝石轴承支撑。
通过固定在旋转架上的装置经传感器检测后将信号传送到主机内进行测算。
仪器内的单片机对风速传感器的输出频率进行采样、计算,最后仪器输出瞬时风速、一分钟平均风速、瞬时风级、一分钟平均风级、平均风速及对应的浪高。
测得的参数在液晶显示器上用数字直接显示出来。
为了减少仪器的功耗,仪器中的传感器和单片机都采取了一系列降低功耗的专门措施。
为了保证数据的可靠,当电源电压太低时,显示器下部电池标记显示缺电,提示用户电源电压太低数据不可靠,需要及时更换电池。
1、风向测量部分1)在观测前应先检查风向部分是否垂直牢固地连接在风速仪风杯的护架上并反向旋转托盘螺母使支撑桌方向度盘的托盘下降,使轴尖与雏形轴承接触。
GFY15双向风速传感器说明书

(5) 复电点: 按遥控器面板上的“功能+”或“功能-”,使数码管显示“5 XXX”(出厂时设为 1.2),用户需要调整时,按“参数+”或“参数-”使数码管显示为用户要求值。
(7) 测试点: 测试功能主要是通过此功能检测其声光报警及输出是否正常。按遥控器面板上的 “功能+”或“功能-”使数码管显示“7 XXX”(0-15.0 可任意设置),用户需要调整时,按“参数+” 或“参数-”,使数码管显示为用户要求值。
注意:每次参数调整完毕后必须按“退出”键,以保证参数被有效的保存,如果没有按“退出” 键或其它键,30 秒后参数不保存自动退出到测量状态。 5 使用注意事项
上下左右晃动,距传感器 20m 范围内不能有遮挡物体存在,以免挡住风流,影响传感器的正常测量。
4.2 传感器接线
本传感器的外部接线采用航空插座方式,外配一个带航空插头的 1.5 米电缆线(型号 MHYVR-1×5× 7/0.3,外径约 8mm)。航空插头各引脚的定义及电缆芯线的对应关系如下:
1 号脚 -- 电缆红芯 --- 电源 + 2 号脚 -- 电缆白芯 --- 电源 3 号脚 -- 电缆蓝芯 --- 信号 + 4 号脚 -- 电缆绿芯 --- 信号 – 5 号脚 -- 电缆黄芯 --- NC(空) 4.3 传感器的使用
(4)传感器所接电缆要求:采用分布参数为(R≤12.8Ω/km、C≤0.06μF/km、L≤0.8mH/km)
的传输电缆时,传输距离不小于 2km。
11 附件及资料
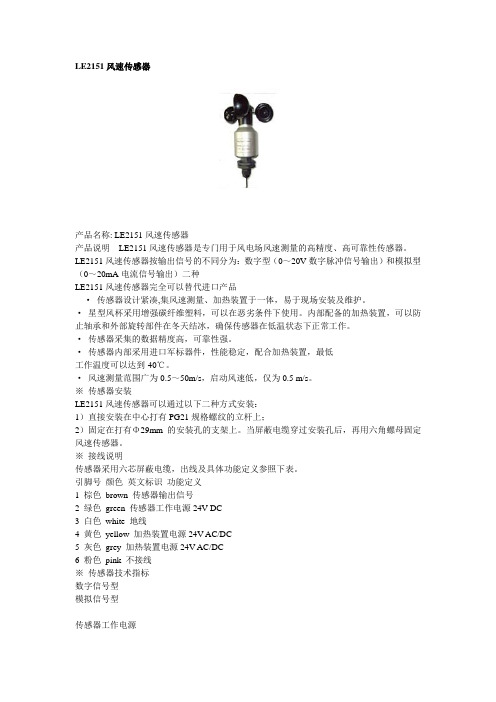
LE2151风速传感器.
产品技术指标参照:中华人民共和国气象行业标准《风电场风测量仪器检定规范》
中华人民共和国国家计量检定规程JJG431《轻便三杯风向风速表》
2绿色green传感器工作电源24V DC
3白色white地线
4黄色yellow加热装置电源24V AC/DC
5灰色grey加热装置电源24V AC/DC
6粉色pink不接线
※传感器技术指标
数字信号型
模拟信号型
传感器工作电源
24V ±10% DC
24V ±10% DC
加热装置工作电源
24V ±10% AC/DC
※传感器安装
LE2151风速传感器可以通过以下二种方式安装:
1)直接安装在中心打有PG21规格螺纹的立杆上;
2)固定在打有Φ29mm的安装孔的支架上。当屏蔽电缆穿过安装孔后,再用六角螺母固定风速传感器。
※接线说明
传感器采用六芯屏蔽电缆,出线及具体功能定义参照下表。
引脚号颜色英文标识功能定义
1棕色brown传感器输出信号
※接线说明
LE2161风向传感器电流输出型采用六芯屏蔽电缆,出线及具体功能定义参照下表。
引脚号颜色英文标识功能定义
1黑色black 0~20mA/4~20mA电流输出
2棕色brown GND
3蓝色blue传感器工作电源+24V
4紫色violet传感器工作电源-24V
5白色white加热装置电源24V AC/DC
24V ±10% AC/DC
加热装置功率
20W max
20W max
输入电流
20mA
10mA
输出电流
30mA max
最大相对湿度
Flow Sensor Series 641RM 风速传感器的安装和操作说明说明书

Series 641RM Air Velocity TransmitterSpecifications - Installation and Operating InstructionsBulletin E-66-RMThe Series 641RM Air Velocity Transmitter uses a heated mass flow sensortechnology. It has 8 user selectable ranges from 250 FPM to 15000 FPM withcorresponding metric ranges of 1.25 MPS to 75 MPS. The Series 641RM Air VelocityTransmitter provides an isolated 4-20 mA out-put proportional to the velocity. With theoptional 1/2˝ 4-1/2 digit LED display, the Series 641RM Air Velocity Transmitter willprovide a highly visible local readout of the velocity.INSTALLATIONLocation: Select a location where the temperature will be within 32 to 140°F (0 to60°C) to mount the enclosure. The transmitter may be located any distance from thereceiver provided that the total loop resistance does not exceed 600 Ω. The probeshould be located where conditions are representative of the overall environmentbeing monitored. Avoid locations where turbulence, stagnation, or rapidly fluctuatingvelocities or temperatures are present as these conditions may affect the readings.The filter setting may be used to average velocity readings in turbulent conditions.Position: The transmitter is not position sensitive and may be mounted in anyorientation.Probe Orientation: Dots on the probe indicate the direc-tion of the calibrated airflow.Align these dots toward the source of the process air.Airflow: The Series 641RM Air Velocity Transmitter is intended for use with clean dryair. Particulates in the air may cause sensor damage. Dust accumulation may impairthe velocity measurement and will require probe cleaning.TO READ DISPLAY UNIT MUST BE MOUNTED HORIZONTALLY AS SHOWNABOVE. DISPLAY CAN BE TURNED 180 SO CONDUIT OPENING CAN BEPOSITIONED TO THE RIGHT OR LEFT.Note: Where conduit connections are not made, a 1/2˝ NPT cable seal should be used to prevent contaminants from entering the case. Where conduit connections are made, make sure that any possible condensation within the conduit will not flow into the transmitter housing.ELECTRICAL CONNECTIONThe Series 641RM Air Velocity Transmitter has been designed for easy and flexible connection to power and loop receivers. Electrical connection is made inside thebody of the device with a “Euro” style terminal block. The device features a current loop that is fully isolated from the power source. The current loop has an internal 24 V isolated supply so no external loop power is required. With full isolation, loop grounding is not a concern. The input power requirements are also very flexible. The device may be powered from either an AC or DC power source.Receiver-Transmitter Connection — The Series 641RM Air Velocity Transmitter is designed as a three or four wire 4-20 mA device. The current loop output is isolated from the power supply input and provides an internal 24-volt loop supply. With a DC power supply, a three or four-wire connection may be used. Do not use a three-wire connection with an AC power source. In a three-wire connection either power supply wire may be used as the common. The total loop resistance should not exceed 600 Ω.Power Supply Connection — The power supply may be either AC or DC. The DC power may be from 12-35 V. The power connection is not polarity sensitive so the positive and negative connections may be made to either power terminal. The AC connection may be from 10-16 VAC RMS. Do not exceed 20 VAC. When selecting a transformer please note that the specified output for transformers is at some specified current. With a load current less than the specified current transformer output may be significantly higher than the specified voltage. Transformers with secondary voltages of 10-16 VAC are recommended.Do not exceed the specified supply voltage rating. Permanent damage not covered by the warranty may result. Do not use anexternal power source on the current loop connection.Do not use a receiver with an internal power supply or use an external supply in the current loop. The current loop is poweredfrom within the Series 641RM Air Velocity Transmitter. Connecting an external supply to the current loop may destroy the transmitter. Using an external supply voids thewarranty.Do not use transformers with a secondary voltage rating greaterthan 16 VAC RMS.Interior label diagramPOWER SUPPLY AC OR DC RECEIVER4-WIRE 3-WIRERECEIVER NEGATIVECOMMONRECEIVERDC SUPPLY ONLY (EITHER POLARITY)3-WIRERECEIVER POSITIVECOMMONRECEIVERDC SUPPLY ONLY (EITHER POLARITY)3 or 4-wire connectionWire Type and Length — The wire selection for an installation is often overlooked or neglected and may contribute to improper or even intermittent operation. In all cases ensure that the connection meets all applicable national and local electrical codes. Although the 4-20 mA current loop systems are relatively immune to wire or wiring related problems, selection of the wire for some installations will be an important factor in ensuring satisfactory system operation. Twisted conductors will usually be immune to most stray electric and magnetic fields and to some extent electromagnetic fields, such as interference from RF transmitters. With twisted pair wiring the current loop and the power connections should be separate pairs. Avoid using flat or ribbon cable that has no regular conductor twist. Where interference is possible, it is recommended that shielded wire be used. The shield must not be used as one of the conductors and should be connected to ground at only one end, generally at the power supply. Similarly, if the installation uses conduit, the conduit should be connected to protective ground as specified by the applicable code and the signal wiring must not be connected to the conduit at more than one point or as specified by the code. The maximum length of wire connecting the transmitter and receiver is a function of the wire resistance and receiver resistance. The total loop resistance must not exceed 600 Ω, including the receiver resistance and wire resistance. The power supply connection must be designed so that the worst case voltage drop due to wire resistance will not cause the power supply voltage at the transmitter to drop below the specified value. Provided the power supply voltage is maintained within the specified voltage range, the Series 641RM Air Velocity Transmitter is not affected by variations in power supply voltage.TRANSMITTER SETUPThe Series 641RM Air Velocity Transmitter has been designed for easy setup. It has five configuration parameters that may be adjusted by the user. These parameters are Output Filter, Range (in English or Metric), span, 4 mA set-point and 20 mA set-point. All of these may be adjusted at any time in the field. These adjustments may also be easily returned to factory default.A set of controls and indicators are provided within the unit consisting of the select button, enter button, adjustment control, and six LED indicators. When operating normally, only the RUN LED indicator will be illuminated. During the setup operation the LED indicators will indicate the parameter selected, when it is being adjusted, and status of the adjustment process. If the unit is left in the setup mode for several minutes without any activity it will return to the normal operating mode.Two buttons and a potentiometer control the setup process.The SELECT button is used to scroll between the setup parameters. The ENTER button allows access to each parameter for adjustment.The ADJUST potentiometer is used to change the value of the parameters. Holding the ENTER button for 2.5 seconds saves the new parameter value.Making AdjustmentsThe adjustment process has three steps: select the para-meter, adjust the parameter, save the new value. These are described in the following steps.1. Select the parameter: Each time the SELECT but-ton is pressed the LED indicator will advance to the next parameter. When the last parameter, SPAN, is selected, the next time the SELECT is pressed the unit will return to RUN mode. Pressthe SELECT button until the LED indicator illuminates the desired parameter. Press ENTER. The selected indicator will begin to blink, show-ing the parameter may now be adjusted. If the unit is left in the setup mode, after several minutes it will reset to the operate mode.2. Adjust the parameter: Turn the ADJUST poten-tiometer until the desired setting is made. This may be adjusted using a small screwdriver or similar tool. Be careful not to force the control past its stops or damage will result.3. Save the parameter: To save the new parameter press and hold the ENTERbutton. The LED indicator will begin to flash at a faster rate. After about 2.5 seconds all of the LED indicators will flash when the parameter is saved. If you do not want to save the parameter press the SELECT button without entering the parameter.The adjusted value will be discarded and next LED indicator will be illuminated.Adjusting the Output FilterThe output filter may be adjusted to smooth the readings when measuring turbulent flow. The time constant may be adjusted from 0.5 seconds to 15 seconds. To adjust the fil-ter time constant, select the FILTER indicator. Press ENTER to enable adjustment. Turn the ADJUST until the desired amount of damping is achieved. To save the value press and hold the ENTER button until the LED indicators all flash, indi-cating the value was saved. To discard the adjustment press SELECT before pressing the ENTER button.1: Indicator on0: Indicator offRange SelectionThe range selection allows you to select one of eight ranges in either feet per minute (FPM) or meters per second (MPS).Ranges:FPM: 250, 500, 1000, 2000, 3000, 5000, 10000, 15000 MPS: 1.25, 2.5, 5, 10, 15, 25, 50, 75Select the RANGE indicator by pressing ENTER when the RANGE LED indicator is illuminated. The A,B,C LED indi-cators will display which range setting is currently active. Press ENTER to enable adjustment. Turn the ADJUST until the desired range indication is achieved. If you want to dis-card the adjustment press SELECT. If you want to save the range press and hold ENTER. The RANGE LED will blink at a faster rate for about 2.5 seconds then all of the LEDs will flash indicating the value was saved.The range setting is displayed with the LED indicators. The function of these indicators is summarized on the control label inside the unit. The following table summarizes the indicator status for each range settingPrinted in U.S.A. 7/21FR# 443309-00 Rev. 2©Copyright 2021 Dwyer Instruments, Inc.Span SettingThe Series 641RM Air Velocity Transmitter has been cali-brated for standard sea level conditions. As a mass flow device it will always read the air velocity for standard condi-tions. Density changes due to barometric or absolute pres-sure are not corrected automatically. The span setting allows correction for altitude or other static pressure condi-tions that affect the density of the process air. This parame-ter allows for a ±50% adjustment in the span value.To make the span adjustment you will need to know either the absolute static pressure or the corrected velocity of the process air. Set the air velocity to a known value, ideally about 3/4 of the full-scale range value. Press SELECT until the SPAN LED indicator is illuminated then press ENTER. The SPAN LED will begin to blink. Adjust the control for the desired velocity then press and hold the ENTER button until all of the LED’s flash, indicating the new value was saved. If you know the absolute static pressure you can compute the corrected velocity using the following equation:Where:P0 is the standard pressure of 29.9 in. Hg. or 760 mm Hg PA is the absolute pressure readingVrdg is the indicated velocity Vcor is the corrected velocity4 mA SettingTo make this setting you will need a milliammeter connect-ed in the current loop. It is not required to use a known air flow velocity to make this calibration setting. The calibration settings of the velocity and mA outputs are independent of each other. Press SELECT until the 4 mA LED indicator is illuminated then press ENTER. The milliammeter will now read approximately 4.0 mA. Adjust the control for a 4.0 mA reading on the milliammeter. Press and hold ENTER to save the new setting. Pressing SELECT before pressing ENTER will restore the previous calibration value.20 mA SettingIt is not required to use a known air flow velocity to make this calibration setting. The calibration settings of the veloc-ity and mA outputs are independent of each other. With the milliammeter connected in the current loop, press SELECT until the 20 mA LED indicator is illuminated. Press ENTER to begin adjustment of the 20 mA set point. The 20 mA LED will now be blinking. Adjust the control until the milliamme-ter reads 20.0 mA. Press and hold ENTER to save the new setting. Pressing SELECT before pressing ENTER will restore the previous calibration value.Restoring Factory Default SettingsThe 4 mA, 20 mA, and Range settings override factory default values. To restore these to the factory default set-tings, start with the unit in the RUN mode. Press and hold the ENTER button. The RUN LED indicator will begin to blink. After about 2.5 seconds all LED indicators will flash indicating the factory settings have been restored. Range and Filter settings are not affected by this operation. If you are unsure whether any have been altered, press the SELECT button six times to sequence through all settings. When you return to the RUN mode, the RUN LED indicator will blink several times if either the 4 mA, 20 mA, or span settings have been changed. The RUN LED will otherwise remain on.MAINTENANCEIn general the Series 641RM Air Velocity Transmitter should require very little maintenance. In some installations dust may accumulate on the sensor over time. This can be removed by carefully brushing the probe with a small camel hairbrush. If too much force is applied during cleaning, the sensor of the Series 641RM Air Velocity Transmitter may be damaged. Therefore, a trained technician should perform the cleaning operation. A jet of air may also dislodge the accumulated buildup. However, the sensor is delicate and this operation should be done carefully with clean regulated air. Using a shop air supply may exert enough force to dam-age the sensor. Most air supplies of this sort will also con-tain water or oil that could damage the sensor. Technical grade denatured or isopropyl alcohol may be used where the dust accumulation does not respond to brushing. Do not use water. Always disconnect the power when perform-ing a cleaning operation.Aside from field calibrations for span, 4 mA and 20 mA set-ting as described above, the Series 641RM Air Velocity Transmitter cannot be fully factory calibrated in the field. Because of specialized computer instrumentation required, these units must be returned to Dwyer Instruments for fac-tory calibration. Contact customer service to receive a return goods authorization number before shipping.V cor = V rdgP OP A。
风速传感器使用说明书

最高位,检查最低位;
4、如果最低位为 0:重复第 3 步(再次移位) 如 果 最 低 位 为 1 : CRC 寄 存 器 与 多 项 式 A001(1010 0000 0000 0001)进行异或;
5、重复步骤 3 和 4,直到右移 8 次,这样整个 8 位数据全部进行了处理;
L:风速测量范围(m/s))
电压型(0-2.5V):
W =V/2.5×L
(W:风速示值(m/s);V:电压信号(0-2.5V);
L:风速测量范围(m/s))
接线方法
传感器底部有一个 5 芯航空插头,其针脚对应 的管脚定义如图所示。
(1)若配备本公司生产的气象站,直接使用传感 器线将传感器与气象站上的相应接口相连即 可。
大树枝可折断。
树木可被吹倒,一般建筑物遭 10 狂风
破坏
大树可被吹倒,一般建筑物遭 11 暴风
严重破坏
13.9~17.l 17.2~20.7 20.8~24.4 24.5~28.4 28.5~32.6
12 飓风 陆上绝少,其催毁力极大
>32.6
4
5.5~7.9
清劲 有叶的小树摇摆,内陆的水面 5
风 有小波,高的草波浪起伏明显
8.0~10.7
大树枝摇动,电线呼呼有声,
6 强风
10.8~13.8
撑伞困难,高的草不时倾伏于地
全树摇动,大树枝弯下来,迎 7 疾风
风步行感觉不便
可折毁小树枝,人迎风前行感
8 大风
觉阻力很大
草房遭受破坏,屋瓦被掀起, 9 烈风
2
49 m m
风速传感器 V1.0 TR-FS02
Vaisala WMT700系列风速传感器用户指南说明书
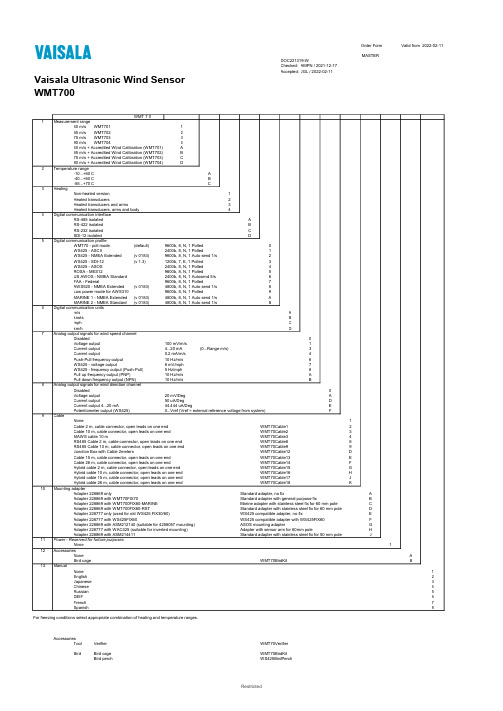
Order Form Valid from2022-02-11MASTERDOC221319-WChecked: AMPN / 2021-12-17Accepted: JGL / 2022-02-11Vaisala Ultrasonic Wind SensorWMT700WMT 7 01Measurement range40 m/s WMT701165 m/s WMT702275 m/s WMT703390 m/s WMT704440 m/s + Accredited Wind Calibration (WMT701)A65 m/s + Accredited Wind Calibration (WMT702)B75 m/s + Accredited Wind Calibration (WMT703)C90 m/s + Accredited Wind Calibration (WMT704)D2Temperature range-10...+60 C A-40...+60 C B-55...+70 C C3HeatingNon-heated version1Heated transducers2Heated transducers and arms3Heated transducers, arms and body44Digital communication interfaceRS-485 isolated ARS-422 isolated BRS-232 isolated CSDI-12 isolated D5Digital communication profileWMT70 - poll mode (default)9600b, 8, N, 1 Polled0WS425 - ASCII 2400b, 8, N, 1 Polled1WS425 - NMEA Extended(v 0183)9600b, 8, N, 1 Auto send 1/s2WS425 - SDI-12 (v 1.3)1200b, 7, E, 1 Polled3WS425 - ASOS 2400b, 8, N, 1 Polled4ROSA - MES12 9600b, 8, N, 1 Polled5US AWOS - NMEA Standard2400b, 8, N, 1 Autosend 5/s6FAA - Federal9600b, 8, N, 1 Polled7AWS520 - NMEA Extended(v 0183)4800b, 8, N, 1 Auto send 1/s8Low power mode for AWS3109600b, 8, N, 1 Polled9MARINE 1 - NMEA Extended(v 0183)4800b, 8, N, 1 Auto send 1/s AMARINE 2 - NMEA Standard(v 0183)4800b, 8, N, 1 Auto send 1/s B6Digital communication unitsm/s Aknots Bmph Ckm/h D7Analog output signals for wind speed channelDisabled0Voltage output100 mV/m/s1Current output 4...20 mA(0...Range m/s)3Current output0.2 mA/m/s4Push-Pull frequency output10 Hz/m/s6WS425 - voltage output8 mV/mph7WS425 - frequency output (Push-Pull) 5 Hz/mph8Pull up frequency output (PNP)10 Hz/m/s APull down frequency output (NPN)10 Hz/m/s B8Analog output signals for wind direction channelDisabled0Voltage output20 mV/Deg ACurrent output50 uA/Deg DCurrent output 4...20 mA44.444 uA/Deg EPotentiometer output (WS425)0...Vref (Vref = external reference voltage from system)F9CableNone1Cable 2 m, cable connector, open leads on one end WMT70Cable12Cable 10 m, cable connector, open leads on one end WMT70Cable23MAWS cable 10 m WMT70Cable34RS485 Cable 2 m, cable connector, open leads on one end WMT70Cable88RS485 Cable 10 m, cable connector, open leads on one end WMT70Cable99Junction Box with Cable 2meters WMT70Cable12DCable 15 m, cable connector, open leads on one end WMT70Cable13ECable 26 m, cable connector, open leads on one end WMT70Cable14FHybrid cable 2 m, cable connector, open leads on one end WMT70Cable15GHybrid cable 10 m, cable connector, open leads on one end WMT70Cable16HHybrid cable 15 m, cable connector, open leads on one end WMT70Cable17JHybrid cable 26 m, cable connector, open leads on one end WMT70Cable18K 10Mounting adapterAdapter 228869 only Standard adapter, no fix AAdapter 228869 with WMT70FIX70Standard adapter with general purpose fix BAdapter 228869 with WMT700FIX60-MARINE Marine adapter with stainless steel fix for 60 mm pole CAdapter 228869 with WMT700FIX60-RST Standard adapter with stainless steel fix for 60 mm pole DAdapter 228777 only (used for old WS425 FIX30/60)WS425 compatible adapter, no fix EAdapter 228777 with WS425FIX60WS425 compatible adapter with WS425FIX60FAdapter 228869 with ASM212140 (suitable for 4258057 mounting)ASOS mounting adapter GAdapter 228777 with WAC425 (suitable for inverted mounting)Adapter with sensor arm for 60mm pole HAdapter 228869 with ASM214411Standard adapter with stainless steel fix for 50 mm pole J 11Power - Reserved for furture purposesNone1 12AccessoriesNone ABird cage WMT70BirdKit B 13ManualNone1English2Japanese3Chinese4Russian5DEIF6French7Spanish8For freezing conditions select appropriate combination of heating and temperature ranges.AccessoriesTool Verifier WMT70VerifierBird Bird cage WMT70BirdKitBird perch WS425BirdPerchCable Cable 2 m, cable connector, open leads on one end227567SP Cable 10 m, cable connector, open leads on one end227568SPCable 15 m, cable connector, open leads on one end237890SPCable 26 m, cable connector, open leads on one end237889SPRS485 Cable 2 m, cable connector, open leads on one end228259SPRS485 Cable 10 m, cable connector, open leads on one end228260SPMAWS cable 10 m227565SPROSA analog cable 10 m, cable connector, open leads on one end231425SPAdapter cable for WS425 serial227569SPAdapter cable for WS425 analog frequency output227570SPJunction Box with Cable 2meters ASM210719SPWMT700 USB service cable240855Universal USB service cable with screw terminal for RS485 or RS232240884Hybrid cable 2 m, cable connector, open leads on one end CBL210706-2MSPHybrid cable 10 m, cable connector, open leads on one end CBL210706-10MSPHybrid cable 15 m, cable connector, open leads on one end CBL210706-15MSPHybrid cable 26 m, cable connector, open leads on one end CBL210706-26MSP Mounting WMT700 Mounting Accessories:Adapter for FIX70228869Fix70 (suitable also for inverted mounting)WMT70FixSPMounting adapter 60mm POM WMT700FIX60-POMSP Mounting adapter 60mm RST WMT700FIX60-RSTSP Cross-arm (40x40x850mm)WMT70CROSSARMMounting adapter between 228869 and 4258057ASM212140Mounting adapter 50mm RST ASM214411WS425 Mounting Accessories:Adapter for old WS425 FIX30/60228777FIX30WS425Fix30FIX60WS425Fix60Sensor support arm for 60mm pole (655mm with integrated fix for item 228777)WAC425Power Outdoor AC (mains) power supply for arm heated and fully heated WMT700PJB480Display Wind display XDi-N 144 (5’’ display) for ship navigation252307 Wind display XDi-N 192 (7’ display) for ship navigation252321。
KGF3型风速传感器

KGF3型风速传感器1 概述1.1 用途KGF3型风速传感器是根据卡曼原理开发的用来测量风速的一种智能型传感器,可以用来检测煤矿井下各种巷道、风口处的风速,可与各种类型的监测系统配套使用。
该传感器性能稳定、使用方便,并能通过遥控器进行现场调整。
1.1 防爆型式防爆型式:矿用本质安全型,防爆标志“ExibI”。
1.2 使用环境条件a.温度:0℃~40℃;b.相对湿度:≤95%(+25℃);c.大气压力:80~106 kPa;d.含瓦斯、煤尘等爆炸性混合物气体、但无显著振动、冲击、淋水的场所。
2 工作原理根据卡曼原理,在流体中插入一个非流线阻力体,当雷诺系数Red在200~5×104范围内时,在阻力体下游将产生两列交替出现的旋涡列,称为卡曼涡街,其旋涡频率与流体的流速成正比。
因此,只要测得频率f,就可以得到流速V。
传感器的超声波振荡器产生等幅超声波振荡信号,该信号加到发射换能器上,并向空气中发射超声波。
此时,接收换能器接收到被旋涡调制的超声波。
该超声波信号经高频放大、检波、低频放大、整形后,变成对应的脉冲信号,再输入单片机进行规一化、非线性补偿处理,然后由LED显示风速值并变成标准的电信号输出。
3 产品结构传感器外形结构如图1所示。
外形尺寸(l×b×h)mm:290×124×30,重量:约1 kg。
4 主要技术性能⑴测量范围:0.4~15 m/s。
⑵测量误差:≤±0.3 m/s。
⑶供电电源:本安DC 10~18 V。
⑷工作电流:45~60 mA;⑸显示方式:三位LED数码管显示风速。
⑹遥控范围:距离不小于5 m,角度不小于120°。
⑺输出信号KGF3—1型:200~1000 Hz,负载电阻>1kΩ,脉冲电平>3 V。
KGF3—2型:DC 1~5 mA,负载电阻0~1kΩ。
KGF3—3型:RS485传输接口,通信波特率:1200 bps。
30.5 风速传感器操作手册说明书

MODEL 30.5WIND SENSOROPERATION MANUALDocument No. 30.5-9800 Rev. AMet One Instruments, IncCorporate Sales & Service: 1600 NW Washington Blvd. Grants Pass, OR 97526 Tel (541) 471-7111 Fax (541) 471-7116 - ******************Copyright Notice30.5 Wind Sensor Manual© Copyright 2021 Met One Instruments, Inc. All Rights Reserved Worldwide. No part of this publication may be reproduced, transmitted, transcribed, stored in a retrieval system, or translated into any other language in any form by any means without the express written permission of Met One Instruments, Inc.Technical SupportThis manual is structured by customer feedback to provide the required information for setup, operation, testing, maintaining, and troubleshooting the 30.5 Weather Sensor. If additional support is required after consulting the printed documentation, please contact an expert Technical Service representative during normal business hours of 7:00 a.m. to 4:00 p.m. Pacific Time, Monday through Friday. In addition, technical information and service bulletins are often posted on . Please contact Met One Instruments and obtain a Return Authorization (RA) number before sending any equipment back to the factory. This allows for better tracking and scheduling of service work to expedite customer service. Please have the instrument’s serial number available when contacting the manufacturer.Voice: (541) 471-7111Fax: (541) 471-7116E-Mail: ******************Mail: Technical Services DepartmentMet One Instruments, Inc.1600 NW Washington BlvdGrants Pass, OR 97526Safety NoticeThe contents of this manual have been checked against the hardware and software described herein. Since deviations cannot be prevented entirely, full agreement cannot be guaranteed. However, the information in this manual is reviewed regularly and any necessary corrections are included in subsequent editions. Faultless and safe operation of the product presupposes proper transportation, storage, and installation as well as careful operation and maintenance. The seller of this equipment cannot foresee all possible modes of operation in which the user may attempt to utilize this instrumentation. The user assumes all liability associated with the use of this instrumentation. The seller further disclaims any responsibility for consequential damages.Electrical & Safety ConformityThe manufacturer certifies that this product operates in compliance with the following standards and regulations:FDA/CDRH This product is tested and complies with 21 CFR, Subchapter J, of the Health and Safety Act of 1968 US 21 CFR 1040.10Table of Contents1.Introduction & Overview – 30.5 Wind Sensor (6)1.1.Overview (6)2.Specifications (7)3.Unpacking & Installation (8)3.1.Unpacking (8)3.2.Deployment (9)Tripod / Pipe top Installation: (9)3.3.Input / Output Connections (10)3.4.Operational Checkout (11)3.5.Maintenance (11)3.6.Setting Magnetic Declination (11)er Selectable Options (12)er Interface (13)6.Standard Configuration (14)7.Appendix A (15)7.1.Terminal Mode Commands (15)7.1.1.H,h,? – Display Help Menu (15)7.1.2.AT – Ambient Temperature Printout Toggle On/Off (15)7.1.3.BV – Battery Voltage Printout Toggle On/Off (16)7.1.4.CV – Compass Measurement Printout Toggle On/Off (16)7.1.5.ID – View / Set Instrument ID (16)7.1.6.MA – View / Set Modbus Address (16)7.1.7.ME – Metric or English Units (17)7.1.8.SU –Wind Speed Units (17)7.1.9.TU –Temperature Units (17)7.1.10.MD –Magnetic Declination (18)7.1.11.OI –Output Interval (18)7.1.12.ST – Serial Trigger (19)7.1.13.RT – Output Record Type (19)7.1.14.RV – Software Version Number (19)8.Modbus (20)8.1.Modbus operation: (20)3X Registers (20)4X Registers (20)9.Appendix B (21)9.1.Theory of Operation (21)1. Introduction & Overview – 30.5 Wind Sensor1.1. OverviewThe 30.5 Wind Sensor provides measurements of wind speed and wind direction in a single, compact, rugged unit. It integrates a folded-path, low-power sonic anemometer. It also includes an internal compass that allows for automatic alignment of wind direction to magnetic north, regardless of the sensor’s orientation.The small footprint and power efficiency of the 30.5 make it ideal for remote regions, urban environments, air quality networks, construction/remediation sites, and other network applications. The sensor works well in permanent (cooperative weather networks, schools, public information dissemination) or temporary (emergency response, audit, research program support) installations.Designed for maximum portability and utility, the 30.5 is well suited for rapid deployment and use by one person under all conditions. The unit may be mounted on a tower, tripod, or vehicle mast. Data outputs are a serial, digital message as well as simple analog voltage outputs that can be interfaced to most data logging systems.2. SpecificationsPARAMETER SPECIFICATION Wind Speed Operating Range 0 to 60 m/s (0 to 134 mph)Wind Speed Accuracy Digital outputs:±0.5 m/s (1.1 mph) or 5% of reading, whichever is greater Analog output:Digital accuracy +/-1mVWind Speed Resolution 0.1 m/s (0.1 mph) Wind Speed Starting Threshold 0.1 m/s (0.1 mph) Wind Direction Range 0 to 360 degreesWind Direction Accuracy Digital outputs:±5° (including Compass) Analog output:Digital accuracy +/-1mVWind Direction Resolution 1.0°Alignment Compass Accuracy ±2°Alignment Compass Resolution 1°Measurement Rate Output 1 HzSignal Output Types RS-232, RS-485, and 0-1VDCMax Cable Lengths RS-232: 15M (50FT)RS-485: 1230M (4000FT) Analog: 100M (325FT)Power Supply 9-36 VDC, current draw 40mA @ 12 VDC typical Operating Temperature -40 to +60 °C (-40 to +140 °F)Operating Relative Humidity 0 to 100%Dimensions 6 inches (152 mm) diameter, 11 inches (279 mm) height Shipping Weight 6 pounds (2.72 kg) (including packaging)3. Unpacking & Installation3.1. UnpackingAny damages incurred to the equipment during shipping are the responsibility of the carrier. If any damage to the shipment is noticed before unpacking, a claim must be filed with the commercial carrier immediately. Please follow any special unpacking instructions provided by the carrier as items are carefully removed from the containers and inspected. It is recommended to document and photograph all damaged packages and items before, during, and after unpacking them.Unpack the 30.5 and accessories and make a visual inspection of the contents; contact the supplier if anything is missing. The 30.5 Weather Sensor ships with the following items:∙30.5 Wind Sensor.∙Calibration certificate.∙Operation manual (this document).Optional Accessories that may be purchased include:∙2954 ¾” IPS pipe vertical mounting adaptor∙WeatherView SoftwareThe required 10624 signal cable is sold separately. It is available in 5M, 12M and 25M lengths. Inquire with Met One Sales or Service groups for other length cables.Contact Met One Instruments (see the Technical Support section at the beginning of this manual) to arrange for any replacement items needed.Please keep the carton(s) and associated packing materials for reuse.3.2. DeploymentTripod / Pipe top Installation:The 30.5 can be quickly and easily deployed on top of a Met One 905 tripod or any other vertical ¾” IPS pipe using the optional 2954 vertical mount.3.3. Input / Output Connections10624 Cable Wire Color Designations:RED POWER POSITIVE (9-36VDC, 40mA nominal @ 12VDC)BLK POWER COMMONBLU ANALOG COMMONGRN SIGNAL COMMONWHT RS-232 TXBRN RS-232 RXYLW RS-485+GRY RS-485-ORN WIND SPEED ANALOG OUT 0-1VDCVIO WIND DIRECTION ANALOG OUT 0-1VDCWHT/BRN SHIELD (must be grounded for transient protection to function) Warning: Unused wires should be isolated and tied back. Take care that wires do not touch each other while power is applied or damage to sensor may occur.Maximum Cable Length Considerations:The maximum recommended cable length depends on the communication protocol to be used:RS-232 50FT maximumRS-485 4000FT maximumANALOG 300FT maximum3.4. Operational CheckoutConnect the 30.5 serial or analog signal wires to a data logger or recording device. Connect power to the sensor cable per wiring diagram in section 3.3. The 30.5 will automatically start measuring wind speed and direction and outputting data on both the serial and analog outputs. Any connected recording electronics should start displaying or recording measurements from the 30.5. Verify the data seems reasonable by comparing it to data from a local weather source. If the data looks OK, the unit is in operation. If data is questionable, contact Met One Instruments, Inc. Service Department for further guidance (see the Technical Support section at the beginning of this manual).3.5. MaintenanceThe unit has no moving parts and therefore requires no periodic maintenance for wear items. It is recommended that the data be checked every 6 -12 months to be sure there has been no failure of any of the electrical components. This can be done by placing a small container (at least 12inch diameter) over the sensor to zero check the wind measurement. The wind readings can be checked against a collocated wind sensor. The 30.5 sensor can also be returned to Met One for wind tunnel verification / calibration. 3.6. Setting Magnetic DeclinationThe internal compass automatically corrects the wind direction in the 30.5 to magnetic North. This means that the unit will not require directional alignment or orientation upon deployment.If it is necessary to measure wind direction referenced to True North it is important to understand and know the magnetic declination of the area in which the sensor is being operated. The declination in the 30.5 is factory set at zero degrees. To change this, refer to the MD command instruction in section 7.1.10 for setting the Magnetic Declination.4. User Selectable OptionsThe following User Defined Options can be set following the instructions detailed in Appendix A.AT Ambient Temperature Printout Toggle On/OffBV Battery Voltage Printout Toggle On/OffCV Compass Reading Printout Toggle On/OffID View / Set Instrument IDMA Set MODBUS AddressMD Set Magnetic DeclinationME Metric or English UnitsOI Set Output IntervalRT Output Record TypeRV Display Firmware Version NumberST Set Serial Trigger AddressSU Set Wind Speed UnitsTU Set Temperature UnitsQ Quit Terminal Mode and Save changes5. User InterfaceThe output of the 30.5 is a fixed length, comma delimited, serial data stream. The serial output is factory set for 9600 baud, no parity, 8 data bits, 1 stop bit, and no flow control. The output interval default is once per second. This may be changed using the OI command (see Appendix A). The data is easily viewed and can be displayed and captured using Met One Instruments’ Comet Software or other terminal communication program.An example of the standard output format is shown below:000.6,272,U0,*02257 CR/LFEach parameter is a fixed length with leading zeros separated by a comma. The string terminates with a Carriage Return and Line Feed. Field parameters are defined as: 000.6,272,+23.1,12.7,090,U0,*02257 CR/LFWS,WD,AT,BV,COMP,CONFIG,CheckSumNote thatThe wind speed and temperature units can be changed with the SU and TU terminal commands, respectively. Please refer to Appendix A for more information. NOTE: Ambient Temperature, Compass reading, and Battery Voltage values are OFF by default in the output string, and can be added using the AT, CV, and BV commands, respectively.; see Section 7.1.2 for details and an output string example.A check sum parameter is added to the end of the message (ex: *02257).The check sum is the addition of all the characters from the start of the message through the first character preceding the asterisk (*). The check sum is expressed as a decimal number. This is a 16-bit sum and should not overflow past 4 digits given the number of characters in the output string.Polled data mode (RS232 or RS485)The sensor can be set for polled data mode instead of continuous serial output by setting the OI command to Zero and using the serial trigger string to request a data string. Refer to the ST terminal command in Appendix A for instructions on setting the Serial Trigger.6. Standard ConfigurationSerial InterfaceThe serial interface is fixed at 9600 Baud and configured for No Parity, 8 Data Bits and 1 Stop Bit, with no flow control.Analog InterfaceThe analog outputs for Wind Speed and Wind Direction are fixed at 0-1VDC.Wind SpeedThe Wind Speed unit choices are m/s or mph. The default is M/S. The Speed range for M/S is 0-60. The Speed range for MPH is 0-134.TemperatureThe Temperature unit choices are Degrees C or Degrees F. The default is Degrees C. The range for Degrees C is -40 to +60, the range for Degrees F is -40 to +140.7. Appendix A7.1. Terminal Mode CommandsRS232 / RS485 Terminal Mode CommandsTerminal mode is activated by entering three carriage return characters within a 2 second period. Terminal mode times-out after 2 minutes of inactivity.Successful entry into Terminal Mode will return an asterisk prompt:7.1.1. H,h,? – Display Help MenuAT - Temperature Printout Toggle On/OffBV - Battery Voltage Printout Toggle On/OffCV - Compass Heading Printout Toggle On/OffID - View / Set Instrument IDMA - Set MODBUS AddressMD - Set Magnetic DeclinationME - Metric or English UnitsOI - Set Output IntervalRT - Output Record TypeST - Set Serial Trigger AddressSU - Set Speed UnitsTU - Set Temperature UnitsRV - Display Firmware Version NumberQ - Quit command mode and save any changesNOTE: The commands noted in this appendix will change both the RS232 and RS485 outputs.7.1.2. AT – Ambient Temperature Printout Toggle On/OffThis command enables or suppresses the Battery Voltage reading in the serial string output. COMMAND RESULTAT<cr> Report current settingAT0<cr> Ambient Temperature Measurement removed from serial output000.0,000,M0,*02112AT1<cr> Ambient Temperature Measurement enabled in serial output000.0,000,+024.5,M0,*023447.1.3. BV – Battery Voltage Printout Toggle On/OffThis command enables or suppresses the Battery Voltage reading in the serial string output. COMMAND RESULTBV<cr> Report current settingBV0<cr> Battery Voltage Measurement removed from serial output000.0,000,+024.5,045,0970.5,000.00,0000,M0,*02112BV1<cr> Battery Voltage Measurement enabled in serial output000.0,000,+024.5,045,0970.5,000.00, 0000,12.0,M0,*023447.1.4. CV – Compass Measurement Printout Toggle On/OffThis command enables or suppresses the Compass Reading in the serial string output. COMMAND RESULTCV<cr> Report current settingCV0<cr> Compass Measurement removed from serial output000.0,000,+024.5,045,0970.5,000.00, 0000,12.0,M0,*02344CV1<cr> Compass Measurement enabled in serial output000.0,000,+024.5,045,0970.5,000.00, 0000,12.0,240,M0,*02547.1.5. ID – View / Set Instrument IDRead or Set the Instrument IDCOMMAND RESULTID<cr> Report the Instrument ID setting (provides help)ID XX<cr> Set Instrument ID to number from 1 to 997.1.6. MA – View / Set Modbus AddressRead or Set the Modbus AddressCOMMAND RESULTMA<cr> Report the Modbus Address setting (provideshelp)MA XX<cr> Set Instrument ID to number from 1 to 247.Setting this value to 0 will disable Modbus.7.1.7. ME – Metric or English UnitsThis command will set all units in the serial port’s output to Metric or English COMMAND RESULTME<cr> Report Units settingME0<cr> Set Units to Metric (Default):WS: m/sAT: Deg CME1<cr> Set Units to English:WS: MPH,AT: Deg F7.1.8. SU –Wind Speed UnitsRead or Set this serial port’s output Units for Wind SpeedCOMMAND RESULTSU<cr> Report Units settingSU0<cr> M/SSU1<cr> MPH7.1.9. TU –Temperature UnitsRead or Set this serial port’s output Units for TemperatureCOMMAND RESULTTU<cr> Report Units settingTU0<cr> FahrenheitTU1<cr> Celsius7.1.10. MD –Magnetic DeclinationThe automatic alignment compass in the 30.5 sensor provides Wind Direction automatically adjusted to MAGNETIC north. Software in the Interface allows the setting of a declination angle to correct the Wind Direction output to TRUE north. It is recommended that this procedure be done in the lab but can be done in the field as well. Once the declination angle is set in the sensor, it is stored in non-volatile memory, and does not have to be reset each time the sensor is fielded. The declination angle must be reset only if the system is used in a different geographical location separated by many miles from the location where the declination was originally set.It is suggested that the magnetic declination be determined before performing this calibration. Visit the following web site for help in determining the correct declination for the installation site:/geomag/declination.shtmlClick “Compute your declination”. On the next page, enter either zip code, or select country and city, then click “Get Location” and then “Calculate”. Alternatively, longitude and latitude can be entered, and then click “Calculate”. Declination is reported in Degrees, Minutes and Seconds. Divide minute’s value by 60 to get decimal fraction of degrees (I.E. 50 minutes = 0.8 degrees). If the declination needs to be adjusted, please use the MD command as shown below.Read or Set the Magnetic DeclinationCOMMAND RESULTMD<cr> Report Magnetic Declination settingMDXX.X<cr> Set Declination to XX.X DegreesNote: West declination values are entered and reported as negative values.7.1.11. OI –Output IntervalRead or Set the Output Interval for this serial portCOMMAND RESULTOI<cr> Report Output Interval settingOI0<cr> For Serial Trigger (Address must be set with ST command).OI1<cr> Sensor Output every 1 second (Default)OI2<cr> Sensor Output every 2 secondsOI3<cr> Sensor Output every 5 secondsOI4<cr> Sensor Output every 15 secondsOI5<cr> Sensor Output every 30 secondsOI6<cr> Sensor Output every 60 seconds7.1.12. ST – Serial TriggerRead or Set the Serial Trigger character string (Poll command) COMMAND RESULTST<cr> Report Serial Trigger string setting (provides help)ST XXXXXX<cr> Set Serial Trigger7.1.13. RT – Output Record TypeRead or Set the Output Record type.COMMAND RESULTRT<cr> Report Output Record TypeRT1<cr> Set Output Record Type to Met Record format (default). RT2<cr> Set Output Record Type to AIO format for compatibilitywith legacy AIO 102780 systems.7.1.14. RV – Software Version NumberReport the current Software Version NumberCOMMAND RESULTRV<cr> Report current Software Version8. Modbus8.1. Modbus operation:The 30.5 can be queried for data using the Modbus RTU protocol. The 30.5 will automatically detect a Modbus data request via its standard RS-232 or RS-485 interface, and will change to Modbus mode, ready to send out data as requested by a connected Modbus Master.If the 30.5 is to be used as a Modbus device, it is recommended to set the Output Interval (OI) command to 0 (zero) to turn off the 1/second output, as shown in section 7.1.11. This will prevent any serial traffic conflicts.The 30.5 can be assigned a Modbus address between 1 to 247, which allows it to be addressed on a multiple device network. Setting the Modbus address to 0 will disable the Modbus functionality of the 30.5. The 30.5’s current measurement data can be polled via Modbus using the 3X and 4X register addresses: 3X RegistersModBus Name Addr Type PointsMB_123456 = 0 float 2 Known value for easier Byte Order configurationMB_SN = 2 Char 5 Serial Number StringMB_Revision = 7 char 20 39 Char + Zero Terminator word aligned to 40 bytesMB_WS = 100 float 2 Wind SpeedMB_WD = 102 float 2 Wind DirectionMB_AT = 104 float 2 Ambient TemperatureMB_Batt = 114 float 2 Supply VoltageMB_Comp = 116 float 2 Compass Heading4X RegistersModBus Name Addr Type PointsMB_Byte_Order = 0 Int 1 1 thru 49. Appendix B9.1. Theory of OperationWindThe Met One 30.5 sonic anemometer operates on the principal that the speed of the wind affects the time it takes for sound to travel from one point to a second point. If the sound is traveling in the direction of the wind, the transit time is decreased. If the sound is traveling in a direction opposite the wind, the transit time is increased. This is used to measure air movement in two perpendicular axes, which are used to calculate Wind Speed and Wind Direction.Ambient TemperatureThe temperature sensor in the 30.5 measures air temperature for the purpose of calculating the wind measurements only. It is not designed to comply with EPA or WMO ambient temperature measurement guidelines.Automatic Alignment CompassThe internal compass module is low power and compact. It employs a pair of magneto-resistive sensors, which change with varying magnetic field strengths, to sense the Earth’s magnetic field.The 30.5 microprocessor measures the output of the internal compass and then corrects the wind direction data for the orientation of the sensor. The output of the 30.5 wind direction is relative to magnetic North. A user programmable value of Magnetic Declination may optionally be entered through terminal mode. This enables wind direction output relative to True rather than Magnetic North.。
GFW15矿用风速传感器使用说明书

GFW15矿用风速传感器执行标准:Q/SDBA003-2012GB3836-2010使用说明书山东三大博安测控技术有限公司20201212年7月目录一、概述 (1)二、主要技术参数 (2)三、传感器工作原理简介 (3)四、安装方法 (4)五、使用操作 (5)六、维护和修理 (8)七、运输与贮存 (8)八、故障分析与排除 (9)九、随机配件 (10)一、概述GFW15矿用风速传感器是依据MT448-2008《矿用风速传感器》和GB3836.4-2010《爆炸性环境第4部分:由本质安全型“i”保护的设备》的标准制造,符合Q/SDBA003-2012产品标准,防爆标志为ExibI(矿用本质安全型)。
本产品主要用于煤矿井下各种坑道、风口、扇风机井口等处风速的检测,以确保煤矿的安全生产。
传感器为本质安全型,是一种智能型检测仪表,环境适应性强,安装调试方便,经国家防爆检验机关进行联机检验后,可与国内各类煤矿监测监控系统配套使用。
1、使用环境条件a)工作环境温度:0~40℃b)相对湿度:≤98%c)大气压力:80~110Kpad)机械环境:无显著振动和冲击的场合;e)煤矿井下有甲烷及煤尘爆炸性混合物,且无破坏绝缘的腐蚀性气体的场合。
2、型号命名G F W15测量范围超声波漩涡式风速传感器3、电缆参数电缆型号:MHYV1×4×7/0.52参数:电阻≤12.8Ω/km,电容≤0.06μF/km,电感≤0.8mH/km4、防爆形式及标志本产品防爆型式为矿用本质安全型,防爆标志为ExibI。
5、外形尺寸及重量外形尺寸(长×宽×高):307mm×131mm×82mm(如图1所示);质量:1.1kg±0.1kg图1:传感器外形尺寸二、主要技术参数1、工作电压:21.5V,波动范围12V~24V(DC)2、工作电流:≤50mA3、测量范围:风速0.4~15m/s4、允许误差:≤±0.3m/s5、重复性误差:显示数值X±1%6、输出方式:频率信号输出,200Hz~1000Hz7、传输距离:传感器使用电缆标称截面积为1.5mm 2时,传感器与关联设备的传输距离2km8、遥控器:普通1.5V 五号干电池2节遥控范围3m9、防爆形式:ExibI (矿用本质安全型)10、本安参数:Ui :21.5V I i :50mA Ci :0μF Li :0mH11、防护等级:IP54三、传感器工作原理简介根据卡曼涡街理论,在无限界流场中,垂直于流向插入一根非流线形阻力体(即旋涡发生体)。
GFW风速传感器使用说明书-精选文档
机械损伤,提高整机的密封性,延长了仪器使用寿命。咨询:四零零零八六零五三七
*稳定性好:本仪器根据卡曼涡街理论测量的风速稳定可靠。 *兼容性好:本仪器可由红外遥控器灵活设置多种输出信号制式,几乎可以与国内所有类型的分站连接。
*外观精巧、结构简单:本仪器电路板采用贴片式焊接,外观轻巧美观,结构精致合理,密封性极好,便于安装
用时只要把传感器的电缆与系统的电源联上即可。
2、安装 实际使用前,一般可进行简单测试。本机出厂时已设置好参数,接线完成后,即可通电。在无风状态,风速显 示为零,然后对准探头进风口吹风,本机即刻显示一定风速。 安装时,把传感器牢固地安装在测量位置,不 能晃动,注意探头进风方向,有三角柱体侧为进风口。接入电源及输出线,即传感器电缆。
接收电路;数据存储电路等组成。 电源电路:
稳压电路由稳压器M1、二极管VD001、电容C000~C003、C307~C309等组成。外接本安电源经稳压后
,给各电路供电5V,D102为电源反相集成块7660,将+5V电压反相输出-5V电压供精密运算放大器D302使 用。
GFW风速传感器结构特征与工作原理
GFW风速传感器结构及原理
超声波调制原理: 根据卡曼涡节理论,在无限界流场中垂直插入一根无限长的非线性阻力体(漩涡发生体)时,则在一定的 雷诺数范围内(RED=200~50000),阻力体下游会产生两排交替的、内旋的漩涡列,而其漩涡率正比于流速 。 微处理电路: 此电路由集成微机芯片(单片机)D101及晶振JZ1、电容C101、C102组成。它完成数据的采集、运算、 处理、控制、输出等功能。
GFW风速传感器概述
GFW风速传感器产品特点
*微电脑处理芯片:采用新型单片微机和高集成数字化电路,使电路结构简单、性能可靠,便于维修调试。 *灵敏度高:高性能的传感器元件加上仪器内部软件的自动非线性补偿使得仪器对风速的检测具有较高的灵敏度
OMC-160 风速传感器安装和技术使用说明书

OMC-160 Anemometer Meteorological Applications Installation & technical user manualVersion 2.04TDC 28-11-2013Version history2.04 28-11-2013 Corrected part number of Wind vane (page 11)TABLE OF CONTENTS1. GENERAL (5)1.1D ATA SUMMARY (6)2. INSTALLATION (7)2.1M ECHANICAL (7)2.2E LECTRICAL (7)3. COMMISSIONING (8)3.1A LIGN PROCEDURE (8)4. SENSOR BODY (9)4.1M AINTENANCE (10)4.2S PARE PARTS (11)5. THE OUTPUT OF THE OMC-160 (12)5.1OMC-160 FORMAT (12)5.2NMEA (12)6. INTERNAL WIRING (13)7. CONNECTIONS (14)7.1J UMPER FUNCTION CONNECTION 13&14 (14)8. DIMENSIONS (15)9. DECLARATION OF CONFORMITY (16)Page intentionally left blank1. GeneralThe wind sensor combination OMC-160 consists of the wind speed sensor and wind direction sensor. The system is robust, lightweight, corrosion resistive and easy to install.The wind sensor is a rotary-cup type unit made from stainless steel. The 3 cups are helicoid shaped, 80 mm in diameter, with an outer spin diameter of 130 mm. Rotation of the cup-unit generates 8 pulses/rotation in an optical encoder. The encoder is directly connected to the micro processor which converts the pulses to wind speed in M/S.The wind direction sensor is a wind vane type unit, made from stainless steel. The wind vane drives a resolver, from which the reference coils are connected to the microprocessor. The micro processor translates the sine and cosine output from the resolver into a direction signal.The microprocessor transmitter is completely encapsulated to withstand extreme environmental conditions. It converts both the optical pulses from the wind speed and the resolver position from the wind direction, into a combined digital signal (serial current loop, 300 bps, ASCII code). This signal can be transmitted over cable lengths up to 1200 meters, but it can also be transmitted via VHF or other data-communication systems. The transmitter unit requires a 8- 30 volts dc supply, which is usually supplied by the indicator coupled to the wind sensor (typically 15Vdc).De-icing heatersAs an option, the wind sensors may be equipped with de-icing heaters. These heaters are located in the top part of the sensors. By heating the bearing-housing, it prevents the rotating parts freezing to the housing in case of precipitation at low temperatures. The heaters (24 Volts ac or dc, 35 Watt) are controlled by a thermostat in the sensor housing.1.1 Data summaryPower supply: 8 TO 30 VDC 60 mAOutput: Currentloop ASCII coded output 20 mA2.30NMEA-0183versionkgWeight: 6.5Dimensions: 865x248x465mm (DxWxH) see sketch chapter 8 Mounting pole: max. 65 mm diaOperating temperature: –25 to 70°CMoisture protection: IP65Humidity: 10 to 95%Accuracy: Wind speed: better than 2% FROWind direction: better than 3 degreesSpeed range: 0,3…75 m/sClass: EMC EN 50081-1 class B, EN 50082-2Conform RoHS directive 2002/95/EC en 2005/18/EC2. Installation2.1 MechanicalThe wind sensor OMC-160 is supplied with the mounting bracket and junction box. This can be mounted on a vertical pipe with external diameters between 35-60 mm using the U-bolt clamps supplied.Before starting the installation, make sure that all components are complete, and that the mast is properly fixed to withstand rugged wind forces. The wind-sensors are usually shipped with the wind vane and cups disconnected from their appropriate units. On the common unit, the upper spindle is for the wind direction sensor, and the lower spindle for the wind speed sensor. To prevent damaging the wind vane and cups, properly mount thesensor/bracket combination on the mast before fitting the wind vane and cup-unit. (this may not always possible)Ensure that the sensors are mounted high enough to avoid any turbulence from obstacles. For guidance refer to the WMO publication ’Guide to Meteorological Instruments and Methods of Observation’ (latest issue).On completion of the above installation carry out the setting-up procedure as contained in the commissioning paragraph 3.1.2.2 ElectricalThe mounting bracket is provided witha junction box for connection of the fieldcabling. The combined wind sensor onlyrequires a 4-core cable (2 twisted pairs, 0.75mm2, common screen). In case that thesensors are equipped with de-icing heater, a6-core cable is required with 2 extra coresfor the heather.Because the current drawn by the heateris ±2 amp the cable from the sensor to thejunction box should be as short as possibleto prevent loss of power. For the cable fromthe junction box to the heater transformer thecable size depends on the length of thatcable.The field cable should be properlysupported, and fastened to prevent exertingforce on the terminals. The common screenof the cable must be grounded to earth onone end only, inside the junction box of thewind sensor.3. CommissioningBefore commissioning the wind sensor, check that the display is properly connected and the power is switched on. The display normally provides the 15 volts dc power supplyto the wind sensor, which can be measured between terminals (1) and (2) at the rear of the display. The wind speed sensor needs no further commissioning, it will automatically transmit the measured speed.3.1 Align procedureLand-based:The wind direction sensor needs alignment. In land based systems the OMC-160 shouldbe aligned to North. After alignment the OMC-160 wind sensor will report "absolute" wind direction. This way of alignment is also used on most fixed offshore rigs.Ship-based:On ship based systems the OMC-160 should be aligned to the bow of the vessel. After alignment the OMC-160 will report "relative" wind direction. This way of alignment is also used on small buoys and on some offshore objects as F(P)SO’s.For the purpose of alignment the sensor is provided with an LED located in the junction box mounted on the mounting bracket which will light-up when the sensor transmits a direction signal around zero degrees (between 350 and 010 degrees):1. Open the cover of the junction box that is located on the mounting bracket toobserve the LED.2. When the color of the LED is green the sensor transmits a direction between002 to 010 degrees.3. When the color of the LED is red the sensor transmits a direction between the350 an the 358.4. When the color of the LED turns yellow the transmitted signal is "North" or 0degrees, within a band width of 2 degrees.5. For land based alignment locate North by using a hand held compass or similar.6. Unscrew the locknut of the wind vane7. Put a screwdriver in the groove of the vane-shaft and set the counterweight ofthe wind vane pointing to North or the ships bow, and keeping it in thisposition, slowly turn the shaft with the screwdriver until the LED lights up.8. Fine adjust the shaft until the LED lits yellow (i.e. North or 0 degrees within 2degrees)9. Tighten the lock-nut of the wind vane, taking care that the vane does not move onthe shaft.10. Check the "North" transmitting signal with LED after tightening the vane locknut.11. Close the junction box cover.Remark:Depending on local circumstances, it may be more practical to align the wind vane with the sensor mounting bracket and adjust the wind vane shaft until the LED light. The mounting bracket can then be aligned to the north by rotating the complete mast, thus aligning the wind vane to the North.4. Sensor body4.1 MaintenanceThe OMC-series wind sensors are designedfor low maintenance and all components are conservatively rated. The only componentsthat are likely to require replacement due to normal wear are the precision ball bearings. Replacement of these components should only be attempted by a qualified technician. Itshould be carried out in a workshop free fromdirt and impurities.Refer to assembly drawings of wind speedand, wind direction sensor for part names and locations. First remove the cup-unit or vane-unit from the body by unscrewing the locknutand lifting the unit. To gain access to the bearings remove the bearing housing by unscrewing the 3 screws on the side of the body. When lifting the bearing housing, the attached transmitter block in the speed sensor,or the resolver in the direction sensor will alsobe pulled out with the attached wiring. Before disconnecting this wiring mark the original connections.In the wind speed sensor the transmitter block must be removed after which the columns can bescrewed off to free the bearing lock plate. The bearings can now be taken out complete with the shaft. In the wind direction sensor this is done in a similar way after removing the resolver.When the bearings are renewed, care should be taken not to apply excessive force on the new bearings.The bearing housings of wind speed and wind direction units are not identical on the OMC-160.When re-installing the complete bearing housing with the transmitter block or resolver, care should be taken that the internal wiring is properly connected, and not touching any moving part.The cable-gland in the bottom part of the body should be tightened to support the field cable.Parts with positioning numbers as used in the drawings on the previous pages.Pos Nr. Description Pos Nr. Description 18 2Ball bearing383Distance column19 2 Ball bearing 39 6 Hexagonal screw 20 2 Axis40 2 Lockingscrew 21 1 Bearing wind direction 41 2 Circlip washer 22 1 Center bus 42 1 Circlip washer23 1 Carrier fork 43 6 Countersunk head screw 24 1 Carrier pin plate 44 1 O-ring 25 1 Mounting plate resolver 45 2 Circlip washer 26 1Distance tube resolver462Spring washer27 3 Bolt 47 2 Cap nut 28 1Resolver29 2 Screw 14 1 Cable gland 30 1Transmitter block15131 1 Bearinghouse wind speed 16 32 1Locking plate331 Pulse code cap4.2 Spare partsPart : Part No.Cup assembly : OMC-9166 Fin assembly : OMC-9165 Transmitter block : OMC-9161 Ball bearing set : OMC-9169Retaining ring Diameter. 10 x 1 mm and 8 x 1 mm included in bearing set.5. The output of the OMC-1605.1 OMC-160 formatJumper on terminal 13 & 14 sets the sensor to OMC-160 ouput:The output of a OMC-160 wind sensor is a current loop signal with ASCII information.The format of this message is:The checksum is all information in the string added, the least significant byte is divided into high and low nibble and both nibbles are incremented by hexadecimal 30. This information is sent out as a checksum.Data protocol,Baud rate = 300 Parity = noneWord length = 8 Stop bit = 15.2 NMEAJumper removed from terminal 13 & 14 will set the output to NMEA 4800 baud (On request this can be set to 9600 Baud).$IIMWV,xxx.x,R,xxx.x,M,A*xx(CR)(LF)$IIMWV, ID : II, MWV message typedirectionxxx.x, WindR, Relativespeedxxx.x, WindM, m/svalue,V= invalid value=validA, A* Check sum identifierxx Check sum (high byte first)ReturnCR CarriageFeedLF Line6. Internal wiringShould for some reason the sensor not be electrically connected to the mounting bracket junction box, access must be gained to the interior of the sensor to enable connection of the field cabling. Remove the bearing-assembly from the sensor body by unscrewing the three screws on the side of the body, and lift the bearing-assembly. In the wind speed sensor the transmitter block is fitted to the bearing housing, and in the wind direction sensor the resolver is fitted to the bearing housing. From the wind direction resolver six signal cores are connected to the transmitter block in the wind speed sensor. The combined output signal is available on 14 screw terminals on the transmitter block. Field cabling can be connected either directly to the transmitter block terminals inside the speed sensor, or via a junction box on the mounting bracket. (see internal wiring diagram)7.1 Jumper function connection 13 & 14In the junction box of the OMC-160 a jumper can be found on terminal 13 & 14. It is possible to set different output types with this jumper. The available settings are:Jumper in place:∙Baud rate 300 baud∙OMC-160 format on terminal 3 & 4 Currentloop∙OMC-160 format on terminal 1 & 9 RS232∙Jumper removed:∙Baud rate 4800 baud∙NMEA format on terminal 3 & 4 Currentloop∙NMEA format on terminal 9 & 10 RS4229. Declaration of Conformity。
F6100系列风速传感器产品说明书
风速传感器(型号:F6100)使用说明书版本号:1.0实施日期:2017.09.20郑州炜盛电子科技有限公司Zhengzhou Winsen Electronic Technology Co.,Ltd声明本说明书版权属郑州炜盛电子科技有限公司(以下称本公司)所有,未经书面许可,本说明书任何部分不得复制、翻译、存储于数据库或检索系统内,也不可以电子、翻拍、录音等任何手段进行传播。
感谢您使用本公司的系列产品。
为使您更好地使用本公司产品,减少因使用不当造成的产品故障,使用前请务必仔细阅读本说明书并按照所建议的使用方法进行使用。
如果您没有依照本说明书使用或擅自去除、拆解、更换传感器内部组件,本公司不承担由此造成的任何损失。
您所购买产品的颜色、款式及尺寸以实物为准。
本公司秉承科技进步的理念,不断致力于产品改进和技术创新。
因此,本公司保留任何产品改进而不预先通知的权力。
使用本说明书时,请确认其属于有效版本。
同时,本公司鼓励使用者根据其使用情况,探讨本产品更优化的使用方法。
请妥善保管本说明书,以便在您日后需要时能及时查阅并获得帮助。
郑州炜盛电子科技有限公司F6100系列风速传感器产品简介F6100是炜盛科技基于热线技术开发的一款风速传感器。
该传感器利用量热原理,具有体积小,重量轻,响应快等特点。
该传感器不含可动部件,惯性极小,特别对于极微小的风速具有良好的响应,适用于微风段的测量。
F6100风速传感器采用模拟电压输出方式,仅有3支引脚,小巧轻便,易于组装,有利于客户快速部署应用。
性能参数产品型号F6100量程①0.5、1、2、3、5、10m/s最小典型值最大单位满量程输出② 4.30 4.50 4.70V零流量输出②0.30.500.70V输出阻抗-200-Ω工作电压 5.0512.0V工作电流8090140mA分辨率③-±5±10‰F.S反应时间0.13S工作温度-25-65℃储存温度-40-90℃管脚功能1VCC 2GND 3OUT图1:传感器尺寸图产品特点温漂低稳定可靠超快响应高灵敏度抗电磁干扰应用场所便携仪器管路检测医疗卫生现场控制新风系统1提供0-100m/s之间任意量程,0.5、1、2、3、5、10m/s为常规量程,其他量程收定制费。
超声波风速风向传感器产品说明书

485型风速风向仪说明书Ver1.0第1章产品简介1.1产品概述超声波风速风向仪,是一款基于超声波原理研发的风速风向测量仪器,利用发送的声波脉冲,测量接收端的时间或频率差别来计算风速和风向。
整机外壳采用ABS材质,具有重量轻、没有任何移动部件、坚固耐用的特点,而且不需维护和现场校准,能同时输出风速和风向。
可以与电脑、数据采集器或其它具有RS485相符合的采集设备连用。
被广泛应用于温室、环境保护、气象站、船舶、码头、养殖等环境的风向测量。
1.2主要参数参数技术指标风速测量范围0~60m/s风速测量精度±2%风向测量范围0~360°风向测量精度±3°响应时间小于5秒波特率9600通讯端口RS485供电电源12VDC工作电流70mA运行温度-30~80℃工作湿度环境0~100%RH(15~95%RH)第1页1.3功能特点◆无启动风速限制,零风速工作,无角度限制,360°全方位,可同时获得风速、风向的数据;◆无移动部件,磨损小,使用寿命长;◆采用声波相位补偿技术,精度高,响应速度快;◆采用随机误差识别技术,大风下也可保证测量的低离散误差,使输出更平稳;◆工程塑料外壳,设计轻巧,携带轻便,安装、拆卸容易◆信号接入方便,支持485-RTU;◆不需维护和现场校准。
第2章硬件连接2.1设备安装前检查安装设备前请检查设备清单:名称数量高精度传感器1台风向485线1条12V防水电源1台(选配)第2页USB转485设备1台(选配)保修卡/合格证1份外形展示:第3页2.1.1接线方式线色说明2电红色电源正源黑色电源负通信黄色485A绿色485B出厂默认提供0.6米长线材,客户可根据需要按需延长线材或者顺次接线。
2.2安装方式第4页采用法兰安装,螺纹法兰连接使风向传感器下部管件牢牢固定在法兰盘上,底盘的圆周上开四个的安装孔,使用螺栓将其紧紧固定在支架上,使整套仪器保持在最佳水平度,保证风向数据的准确性,法兰连接使用方便,能够承受较大的压力。
WFS 风速传感器使用说明书

WFS 系列风速传感器使用说明书[ WT-197V2.0 ]-1--4--2--3-WFS-1型风速传感器应用典型三杯式设计,由壳体、风杯、和电路模块等组成。
本产品通过风杯和进口轴承及其附件的配合,将风的流速转换成机械转速,再通过内部非接触式磁传感应换成电信号,实现对风速的电信号检测。
本产品壳体采用改良型工程塑料注塑成型,美观大方、耐热、耐低温、防水耐腐蚀、电气性能优良。
广泛用于铁路、港口、码头、电厂、索道、环境、养殖、农业、节能监测、工程机械等领域。
测量范围:1.0~60m/s准 确 度:<30m/s±(0.5+0.05v) ≥30m/s±5% 起动风速:<0.1m /s 工作电压:DC12-36V 响应时间:<0.5s环境温度:-20℃~ +70℃ 湿度: 20%-90%RH (25℃不结露)-6-WFS-15.2 信号输出航插座引脚定义1:电源+2:4~20MA 3:NA 4:NA 5:GND例、WFS-1-3 表示信号输出为0-5V 。
5.1 产品选型及引脚定义WFS-2-2 接线定义4~20mA 0~5V Rs4851234厂家型号 输出型号代码 输出型号类型5.3 MODBUS RTU 通讯协议5.3.1参数说明我公司对外输出的通讯采用标准modbus 的RTU 协议。
串口通信方式:RS485通信参数设置:波特率:9600 数据位:8 停止位:1 校验位:无通信超时:建议设置50ms 以上轮询间隔:建议设置50ms 以上5.3.2消息说明接收的命令字格式如下:字节序号 类别 内容 说明 备注0102030405060708消息头可变消息尾XX 030001XX XX XXXX仪表地址 功能码 寄存器地址H 寄存器地址L 数据长度H 数据长度L 根据仪表系统参数设置固定固定根据每台仪表的需要设置随数据的变化而变化CRC16校验码当仪表接收到正确的命令字后,开始回传正确的数据,命令格式如下:字节序号 类别 内容 说明 备注010203消息头回传的数据消息尾仪表地址 功能码 数据长度数据1(风速)数据2(风级)数据3根据仪的地址设置固定 根据每台需要来040506070809XX 03XX H L H L H L ……………………XX XXWFS-2-3 接线定义 WFS-2-4 接线定义数据的长度和每个数据代表的含义根据每台仪表的情况来确定随数据的变化而变化CRC16校验码本产品属精密电子产品,正确的维护保养有助于保护仪器性能、延长传感器的使用寿命,应注意下列几点:1、按说明书要求正确使用,接线有误可能导致传感器损坏.2、轻拿轻放,误压,否则导致产品结构变形损坏,或精度降低。
慧传科技 AFS1100 气体流速传感器说明书

AFS1100 产品说明书风速传感器12~24V 直流工作电压 标准的Modbus-RTU 协议 超长使用寿命产品综述AFS1100是为测量气体流速而设计的传感器。
该传感器基于热膜式原理测量气体的流速。
产品使用了标准Modbus-RTU 数据输出信号格式。
每一个传感器的出厂都经过校准和严格的测试,满足客户的使用需求。
图1 AFS1100风速传感器应用范围AFS1100风速传感器对环境、气体及安装条件等的要求较为严苛,所以不适合在室外使用。
传感器主要应用于医疗及工业上通风管道内的风速测量。
慧传科技135377847慧传科技135377847081.传感器性能参数表1 传感器性能参数标定温度和气压 20℃,标准大气压 测量目标气体 空气、氮气(其它气体测量请咨询)测量范围 0~30m/s 检测下限 0.6m/s精度 量程小于10m/s 时,±(实际风速×3%+0.3m/s ) 量程大于等于10m/s 时,±(实际风速×5%+0.3m/s ) 重复性 ±(测定值×1.5%) 响应时间 1.5s (90%响应时间) 工作温度 -10℃~+45℃湿度范围 5~95%相对湿度 (RH),不结露 工作电压DC 12~24V 工作环境压力700~1300mbar2.产品尺寸图和零部件图2.1 AFS1100尺寸图图2 AFS1100尺寸图(单位:mm 标公差:±0.2mm )慧传科技135377847慧传科技135377847082.2 AFS1100零部件图1、传感器支撑外壳;2、金属管;3、金属针;4、 螺纹法兰;5、 法兰螺母;6、AFS1100上盖;7、扣线帽;8、Error 信号灯;9、Power 信号灯; 10、拨码开关;11、气流方向; 12、螺丝图3 AFS1100零部件示意图3.安装说明3.1 安装条件传感器在AFS1100上盖上标有箭头指示安装需要的气流方向,如图3中11所示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
风速传感器
产品说明书
目录
简介 (2)
技术参数 (2)
功能特点 (2)
传感器构成及特点 (2)
结构尺寸图 (2)
固定方式 (3)
信号输出定义 (3)
线色定义 (3)
RS485通讯协议 (3)
寄存器说明与命令格式 (5)
风力等级划分表........................................................................................错误!未定义书签。
风速与输出信号对应表.. (6)
维护和保养 (7)
用户反馈意见表 (7)
附录一、风速传感器RS485通讯设置及实例 (7)
联系方式………………………………………………………………………………….……错误!未定义书签。
一、产品简介
该传感器是三杯式风速传感器,可用于工程机械(起重机、履带吊、门吊、塔吊等)领域,铁路、港口、码头、电厂、气象、索道、环境、温室、养殖、空气调节、节能监控、农业、医疗、洁净空间等领域风速的测量,并输出相应的信号。
二、技术参数
RS485通讯型
脉冲型
电压型:0-5VDC
电流型:4-20mA
电源:DC12~24V
量程:0-30m/s
风速分辨精度:0.1m/s
最大功耗(DC24V):脉冲型MAX≤0.2W;
电压型MAX≤0.3W;
电流型MAX≤0.7W;
启动风力:0.4~0.8m/s 重量:≤0.5Kg
三、功能特点
◆体积小,携带方便、安装简捷、外观精美;
◆有较强的防腐蚀性和耐候性;
◆测量精度高,量程范围宽,稳定性好;
◆功耗低,较强的抗干扰能力,能长期稳定工作;
◆电源适应范围宽,数据信息线性度好,信号传输距离长;
四、传感器构成及特点
风速传感器由壳体、风杯和电路模块组成。
传感器壳体和风杯采用铝合金材料,使用特种模具精密压铸工艺,尺寸公差甚小表面精度甚高,内部电路均经过防护处理,整个传感器具有很高的强度、耐候性、防腐蚀和防水性。
电缆接插件为军工插头,具有良好的防腐、防侵蚀性能,能够保证仪器长期使用,同时配合内部进口轴承系统,确保了风速采集的精确性。
电路PCB采用军工级A级材料,确保了参数的稳定和电气性能的品质;电子元件均采用进口工业级芯片,使得整体具有极可靠的抗电磁干扰能力,能保证主机在-20℃~+70℃,湿度0%~85%(不结露)范围内均能正常工作。
五、结构尺寸图
六、固定方式
传感器应水平安装,确保风向数据的准确性;采用法兰安装方式,传感器下方安装法兰直径Ф60mm,三个安装孔为Ф6.6mm,三个安装孔均匀分布再Ф47mm的圆周上,安装使用法兰固定安装,安装尺寸如下:
七、信号输出定义
电压型和电流型输出定义如下
①电源正极
②电源负极
③电压信号
④电流信号
RS485输出定义
①电源正极
②电源负极
③A+/RXD
④B-/TXD
八、线色定义:
电压型和电流型线色定义
1──红色(电源12V~24V)
2──黑色(GND)
3──蓝色(电压输出Vout)
4──黄色(电流输出Iout)
RS485通讯型线色定义
1──红色(电源12V~24V)
2──黑色(GND)
3──蓝色(A+/RXD)
4──黄色(B-/TXD)
RS485通讯协议
数据报文格式
(1)、功能码0x03---查询从设备寄存器内容
主设备报文
从设备正确报文
(2)
主设备报文
从设备正确报文
(3)
(4)、功能码0x10---对从设备寄存器置数
从设备正确报文
注:1、CRC检验码低位在前、高位在后,寄存器地址, 寄存器个数,数据均为高位在前、低位在后;
2、寄存器字长为16bit(两个字节);
寄存器说明与命令格式
(2)、通讯实例参加“附录一、风速传感器RS485通讯设置及实例”
风力等级划分表
维护和保养
本仪器是具有优良设计和功能原理的科技产品,应注意维护和保养。
下列建议将帮助您有效使用保养服务。
避免仪器被刮划,保持外部保护膜完整性,以增加仪器使用寿命;
使用仪器时请将各连接部位固定牢固,避免仪器的损坏;
禁止粗暴地对待仪器否则会毁坏内部电路板及精密的结构;
不要用颜料涂抹仪器,涂抹会在可拆卸部件中阻塞杂物从而影响正常操作;
使用清洁、干燥的软布清洁仪器外部;
定时查看其他配置设备的电源电量,确保仪器正常工作
用户反馈意见表
感谢您使用本公司产品,您可以对本产品安装、使用、功能、技术、体验等提出宝贵意见和改善建议反馈给我们,我们将会对相应问题进行及时处理。
您的宝贵意见与改善建议是我们不断成长的力量来源!
注:表格中所涉及个人信息,未经您的许可我们不会对外泄漏。