手功能康复仿生手套的研制
高端康复辅助器具开发生产方案(一)
高端康复辅助器具开发生产方案一、实施背景随着社会老龄化程度的加深,康复辅助器具市场需求持续增长。
然而,当前市场上的康复辅助器具主要以中低端产品为主,无法满足高端用户的需求。
因此,开发生产高端康复辅助器具具有迫切性和必要性。
二、工作原理本方案所开发的高端康复辅助器具采用先进的机电一体化技术、人工智能算法、生物力学原理等,具备智能化、个性化、高效化的特点。
其主要工作原理如下:1.机电一体化技术:利用微电机、齿轮、链条等机械部件,实现康复辅助器具的自动化和智能化控制。
2.人工智能算法:通过算法分析用户的步态、姿势等信息,判断用户的运动状态和需求,从而自适应调整器具的工作模式和参数。
3.生物力学原理:结合人体生理结构和运动机理,优化器具的设计,提高用户的舒适度和使用效果。
三、实施计划步骤1.需求分析:对高端康复辅助器具市场需求进行深入调研,明确用户需求和产品定位。
2.技术研发:组织技术团队进行研发,攻克关键技术难题,如智能化控制、人工智能算法、生物力学设计等。
3.产品设计:根据市场需求和技术研发成果,设计高端康复辅助器具的外观和结构。
4.样品制作:制作样品,进行实际测试和用户体验反馈,优化产品设计。
5.生产准备:完成工艺流程制定、原材料采购、设备调试等工作,确保生产顺利进行。
6.批量生产:经过质量检测和用户反馈调试后,进入批量生产阶段。
7.市场推广:制定市场推广策略,开展线上线下宣传活动,提高产品知名度和销量。
四、适用范围本方案所开发的高端康复辅助器具适用于以下场景:1.医院康复科:为患者提供个性化的康复辅助器具,加速恢复肢体功能。
2.养老院:为老年人提供行走辅助器具,提高生活质量。
3.残疾人康复中心:为残疾人提供运动训练和日常生活辅助器具,实现生活自理。
4.体育训练机构:为运动员和健身爱好者提供运动训练辅助器具,提高运动表现。
5.家用市场:为家庭用户提供康复辅助器具,方便家庭成员使用。
五、创新要点本方案所开发的高端康复辅助器具的创新要点如下:1.采用机电一体化技术和人工智能算法,实现智能化控制和个性化调整。
气动康复手套的制作方法
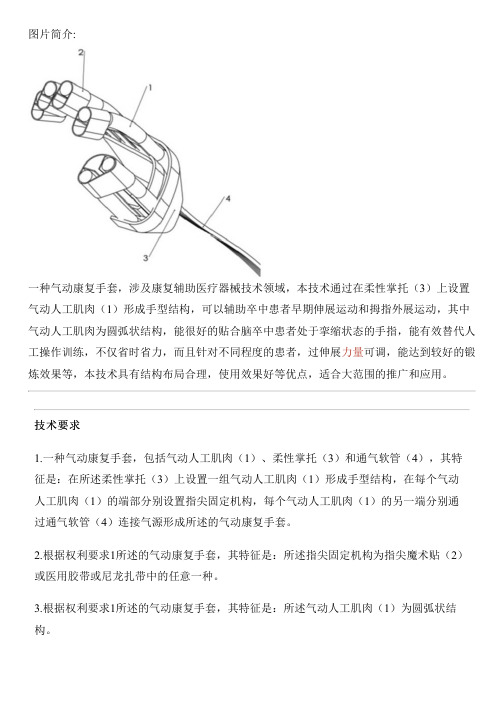
图片简介:一种气动康复手套,涉及康复辅助医疗器械技术领域,本技术通过在柔性掌托(3)上设置气动人工肌肉(1)形成手型结构,可以辅助卒中患者早期伸展运动和拇指外展运动,其中气动人工肌肉为圆弧状结构,能很好的贴合脑卒中患者处于挛缩状态的手指,能有效替代人工操作训练,不仅省时省力,而且针对不同程度的患者,过伸展力量可调,能达到较好的锻炼效果等,本技术具有结构布局合理,使用效果好等优点,适合大范围的推广和应用。
技术要求1.一种气动康复手套,包括气动人工肌肉(1)、柔性掌托(3)和通气软管(4),其特征是:在所述柔性掌托(3)上设置一组气动人工肌肉(1)形成手型结构,在每个气动人工肌肉(1)的端部分别设置指尖固定机构,每个气动人工肌肉(1)的另一端分别通过通气软管(4)连接气源形成所述的气动康复手套。
2.根据权利要求1所述的气动康复手套,其特征是:所述指尖固定机构为指尖魔术贴(2)或医用胶带或尼龙扎带中的任意一种。
3.根据权利要求1所述的气动康复手套,其特征是:所述气动人工肌肉(1)为圆弧状结构。
4.根据权利要求1所述的气动康复手套,其特征是:所述气动人工肌肉(1)包括堵头(5)、乳胶管(6)、编织网(7)和弹性塑料片(8),在所述乳胶管(6)的外缘面上包裹编织网(7),在编织网(7)的外缘面上设置一条弹性塑料片(8),乳胶管(6)的两端分别通过堵头(5)封堵,在其中一个堵头(5)上设有软管连接孔,所述软管连接孔连接通气软管(4)。
5.根据权利要求4所述的气动康复手套,其特征是:所述乳胶管(6)、编织网(7)和弹性塑料片(8)的两端分别通过堵头(5)固定在一起。
6.根据权利要求1所述的气动康复手套,其特征是:所述气动人工肌肉(1)设置为五个,五个气动人工肌肉(1)上的弹性塑料片(8)分别位于五根手指的背侧。
7.根据权利要求1所述的气动康复手套,其特征是:所述气动人工肌肉(1)设置为六个,其中五个气动人工肌肉(1)上的弹性塑料片(8)分别位于五根手指的背侧,第六个气动人工肌肉(1)上的弹性塑料片(8)位于大拇指的外侧。
脑卒中后手功能障碍康复辅助器具的应用研究
骼 。机 械外 骨骼作 为一 个 新 兴 的研 究 领 域 , 其 特 点 在 很 多 方面都 有着 极 大 的研 究 价 值 , 可 作 为脑 卒 中后 手 功能 障碍 的康 复手 段 。虽 然 手 部 的 运动 非 常 复 杂 , 但
是有 研 究 显 示 , 新 的 手 部 外 骨 骼 的可 行 性 已经 被 证 实 ¨。国外 已有 报道 利用 交互 式手 部 外 骨骼 装 置 , 可
以及康 复服务 提供 者 没有 意 识 到 辅 助器 具 的可 用性 、
使用 方法 和 由此 带 来 的好处 等 问题l 3 ] 。 为此 , 本 文 就 分指 板 、 手部矫 形器 、 手部 外 骨 骼 装置 、 机器 人 辅 助 技 术、 脑机 接 口技 术 等在辅 助器具 中的应用 做简 单介绍 。 1 辅具 在康 复治 疗 中的应 用 1 . 1 分指板 脑 卒 中后 患 者 常 出现 手 指 的 屈肌 张 力
点 。当前 , 虽然 政府 和 康复 机 构 都 在 积极 助推 辅 助 技
术 的发展 和应 用 , 但 是还 存在许 多残 疾人 、 他们 的家 人
挛 得分 下降 显著 ; 在肩 峰 和肘高 度执行 抓 取任务 时 , 腕
关 节痉 挛得 分也 下降 显著 。 因此 , 认为 s a e b o f l e x训 练 对 脑卒 中后 偏瘫 上肢 运动 功能恢 复有 效 。 1 . 3 手部 外 骨骼装 置 能像 节 肢 动 物一 样 可 以依 附 并 用 于辅助 完成 运动 功 能 的 机械 装 置 , 称 为 机 械 外 骨
以满 足主 动和 被动 的康 复活 动需 求 。因此 , 有 必 要
对 外 骨骼 做 一 些 探 讨 。S h i e l d s等 报 道 , 通 过 安 装 在手 和外 骨骼 之 间 的压 力传 感 器 阵 列 , 将 检 测 到 的压
康复训练手套主从控制设计
逐年 I ", 味 康复治 疗需 求 也急 剧增 J J I 1 目前 临床 巾心 的J 求 治疗 ,仍 人 多数 采 卜 I j 疗 师 5 - 患芹 ・ 埘… 的 模式 ,『 1 疗 师协助 忠 行进 行肢 体功 能 康复 训练 埭复
1总体方案设计
圳练 _ r会 从控 制 系统 总体设 计力 案,圳 1 所 , J : t动 端 ( 示教 F ) 的拇指 、食指 、 指分) 3 1 J l f B 置
研 肌 电 t ; - s E M C采 集 也 町反 映示教 下部肌 肉动作 j 系 统输 m的 天 系 ,辅 助 训练 岬实时 舰察 系统 T作状 态 水 史结 合 L a b V I E W 软件 与A r & l i n o 6 史 件 的特点 ,殴 汁r r 主从控 制 的 于 部埭 复 训练 系统 系统 采川 弯 } j I t 传 感 采 集 主动 示 教 _ 于 . 部 动 作 ,J } 结 合 衷 肌 电 传 感 采
气 功 动 .具 有较 女 , j 柔忤 ,捉 离 r系统 安 全性 l 2 l
电传感; * } ,采集表f f i i l U [ 肉电信 ‘ 许传输 至上化机 ¨五 机
通过 埘 表面肌 电信 进 行 积分 处娜 .可 舭 地 行刮训 练过 程r f I 弯 度传 感 输 j { J 与肌 肉活 动 号 的卡 H 火性 。
技术应用 I T e c h n i q u e l d a p p t i c a t i e
康 复 训 练 手 套 主 从 控 制 设 计
◆ 刘持强 王志坚 ’ 李向攀 。 ’ 韩建海 。 。 。 : 郭冰菁 。 。
( 1 河南科技 赶学机电工程学院,河南洛l I E l ,4 7 1 0 0 3 ;2 河I 南省机器人及智能系统重点 实验室,河南洛阳,4 7 1 0 0 3 3 河南科技 大学机械装备先进制造河南省协 同创新中心,河南洛阳,4 7 1 0 0 3 )
高端康复辅助器具开发生产方案(二)
高端康复辅助器具开发生产方案一、实施背景随着社会老龄化程度的加深,康复辅助器具市场需求持续增长。
然而,当前市场上的康复辅助器具主要以中低端产品为主,无法满足高端用户的需求。
因此,开发生产高端康复辅助器具具有迫切性和必要性。
二、工作原理本方案以“智能仿生”为核心技术,通过高精度传感器、人工智能等技术,实现康复辅助器具的智能化、个性化。
具体工作原理如下:1.高精度传感器:通过传感器采集用户的运动信息,包括速度、角度、力度等,为后续的智能控制提供数据支持。
2.人工智能:基于深度学习算法,对采集到的运动信息进行分析,判断用户的运动意图,并自动调整辅助器具的助力大小和方向,以实现个性化的辅助。
3.智能仿生机构:结合人体工程学和机器人技术,设计具有多自由度的仿生机构,实现与人体运动相匹配的助力效果。
4.能量回收技术:利用势能、动能等能量形式,实现辅助器具的自主能源供给,降低对外部电源的依赖。
三、实施计划步骤1.前期调研:深入了解高端康复辅助器具市场需求、竞争对手情况,为产品研发提供参考。
2.技术研发:组织研发团队,开展传感器技术、人工智能算法、仿生机构设计、能量回收技术等方面的研究。
3.样品制作:根据研发成果,制作高端康复辅助器具样品,进行实际测试和性能评估。
4.临床试验:在医疗机构或康复中心进行临床试验,验证产品的安全性和有效性。
5.产品定型:根据临床试验结果,对产品进行优化和改进,形成最终的产品方案。
6.生产准备:联系合作厂家,准备生产设备、原材料等,制定生产计划。
7.批量生产:按照生产计划,进行高端康复辅助器具的批量生产。
8.销售推广:通过多种渠道进行产品销售和推广,如医疗机构、康复中心、电商平台等。
四、适用范围本方案适用于以下场景:1.医疗机构:用于患者的康复训练,提高康复效果。
2.养老机构:为老年人提供辅助行走、起立等功能的康复辅助器具,提高生活质量。
3.体育训练:用于运动员的损伤康复和体能训练,提高运动表现。
橡胶手套的制作流程
橡胶手套的制作流程橡胶手套是一种用于保护双手免受化学品、细菌、病毒和其他有害物质侵害的手部保护装备。
它是通过将天然或合成橡胶材料转化成特定形状和尺寸的手套来制造的。
下面是橡胶手套的制作流程。
1.原料准备生产橡胶手套的主要原料是天然橡胶或合成橡胶。
天然橡胶由橡胶树的乳液提取而来,合成橡胶则是由石油化学工业生产的。
除了橡胶,还需要其他辅助原料,如硫化剂、防老剂、增塑剂和染料等。
这些原料需要按照一定的配方比例混合制备。
2.混炼混炼是将橡胶和其他辅助原料进行充分混合和研磨的过程。
这一过程通常在混炼机中完成。
混炼机将原料放入搅拌槽中,通过机械搅拌和高温加热使其混合均匀。
这可以帮助原料之间的化学反应发生,并使橡胶具有更好的延展性和弹性。
3.制模制模是将混炼好的橡胶制成手套形状的过程。
制模可以通过涂胶工艺或浸泡工艺来完成。
在涂胶工艺中,混炼好的橡胶涂覆在制模器上,然后通过烘干使其固化。
在浸泡工艺中,制模器被浸入装有橡胶混合物的浸液中,然后慢慢提升,使其表面形成一层均匀的橡胶薄膜。
4.乳化处理在制模之后,手套需要进行乳化处理以增强其柔软性和耐用性。
这一过程通常使用特殊的化学药剂完成。
乳化剂被涂布在手套的表面上,并通过烘干进行固化。
乳化处理可以使手套更加柔韧,并增加其对化学物质的抵抗能力。
5.硬化硬化是将手套加热到一定温度以使橡胶固化的过程。
这一过程可以通过烘干机、热风炉或高频加热器来完成。
加热的温度和时间可以根据具体产品的要求来进行调节。
硬化后,手套形成了其最终的形状和结构,具有耐磨、耐折和耐化学腐蚀等特性。
6.检验和包装以上是一般橡胶手套的制作流程,不同品牌和类型的手套可能会有些许差异。
制造橡胶手套涉及到化学、工程和生产技术等多个领域的知识,需要严格遵守相关的质量标准和生产规范。
手功能康复仿生手套的研制
控 制盒 内。
用该变化值作为参量, 控制单片机装置发出相应 的指 令 , 出幅度 可变 的脉 冲信号 。根据 患 者对刺激 强 度 输 的反应 程度 调节适 中的脉冲 幅度 , 利用 刺激 电极 对 肌
肉进行功 能性 电刺 激 ,产 生手 的抓或 放 ,从 而 达到辅
助 圳练 的 目的 。 3 设计 原 理及方 法
Ab t a t Th a ay i r H ce e r e e v ee tia si ua in h u h h r m an n r oor e v s a t r C1 r src : e p r ltc c o g t e e ii g n t n r e fe S o l r
患者 , 则可 省略这 一步 。然后 年用 手套 中位 于手腕 部 0 位 的线 性 位移 传感器检 测手 腕 的运 动 角度 的变化 , 利
囤 1 仿 生 手 套 被
手 套用新 型 弹力 材料 Nepe e氯 丁二烯 橡 胶 ) o rn ( 制成 ,手 掌部分 可 以用 马革 之类 的 耐磨 材料 补缀 ,使 用搭 扣 以使 手套 可 紧套 在前臂 和手 上 , 手套 内层 使 的导 电 区和 电极 良好接 触 ,电气 部分位 于手 套背部 的
手指关节康复训练系统技术参数
手指关节康复训练系统技术参数
手指关节康复训练系统的技术参数主要包括以下几个方面:
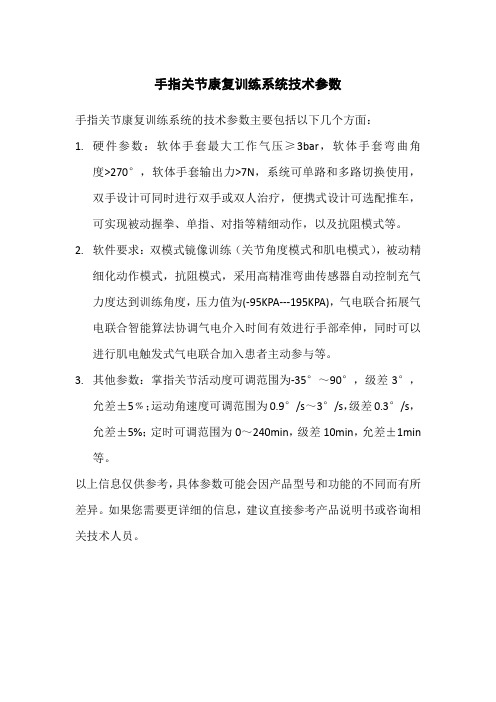
1.硬件参数:软体手套最大工作气压≥3bar,软体手套弯曲角
度>270°,软体手套输出力>7N,系统可单路和多路切换使用,双手设计可同时进行双手或双人治疗,便携式设计可选配推车,可实现被动握拳、单指、对指等精细动作,以及抗阻模式等。
2.软件要求:双模式镜像训练(关节角度模式和肌电模式),被动精
细化动作模式,抗阻模式,采用高精准弯曲传感器自动控制充气力度达到训练角度,压力值为(-95KPA---195KPA),气电联合拓展气电联合智能算法协调气电介入时间有效进行手部牵伸,同时可以进行肌电触发式气电联合加入患者主动参与等。
3.其他参数:掌指关节活动度可调范围为-35°~90°,级差3°,
允差±5﹪;运动角速度可调范围为0.9°/s~3°/s,级差0.3°/s,允差±5%;定时可调范围为0~240min,级差10min,允差±1min 等。
以上信息仅供参考,具体参数可能会因产品型号和功能的不同而有所差异。
如果您需要更详细的信息,建议直接参考产品说明书或咨询相关技术人员。
手部肌腱功能锻炼手套的研制与临床应用研究
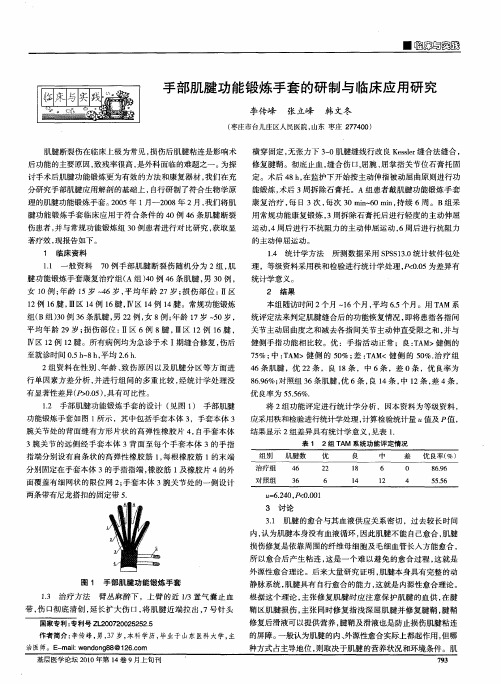
本组 随访时间 2个月 ~ 6个月 , 1 平均 65 .个月 。用 T M系 A 统评定法来判定肌腱缝合后 的功 能恢 复情况 , 即将患指各指间 关节主动屈 曲度之和减去各指 间关节 主动伸直受 限之和 , 并与 健侧手指 功能相 比较 。优 :手 指活动正常 ;良 :A >健侧 的 TM 7 %; : A >健 侧 的 5 % ; :A 5 中 T M 0 差 T M<健 侧 的 5 %. 疗组 0 治 4 6条 肌腱 ,优 2 2条 , 良 1 8条 ,中 6条 ,差 0条 ,优 良率为
8 . %; 69 对照组 3 6 6条肌腱 , 6 , 1 , 1 条 , 4条 , 优 条 良 4条 中 2 差
优 良率 为 5 . %. 55 6
将2 组功 能评定进行统计学 分析 ,因本资料为等级资料 ,
应采用秩和检验进行统计学处理 , 计算检验统计量 值及 P值 ,
结 果 显 示 2组 差 异 具 有 统计 学 意 义 , 表 1 见 .
■ 嫡鼹目密凰
手 部 肌腱 功 能 锻炼 手 套 的 研 制与 临床 应 用研 究
李传峰 张立峰 韩 文冬
( 枣庄市 台儿庄区人 民医院 , 山东 枣庄 2 7 0 7 4 0)
肌腱断裂伤在临床上极为常见 , 损伤后肌腱粘连是影响术
后功能的主要原 因, 致残率很 高 , 是外科 面临的难题之一 。 为探 讨手术后肌腱 功能锻 炼更 为有效的方法和康复器材 , 我们在充 分研究手部肌腱应用解 剖的基础上 , 自行研制 了符合生物学原 理 的肌腱功 能锻炼手套 。 0 5年 1月一2 0 年 2 , 20 08 月 我们将肌 腱功能锻炼手套 临床应用 于符合条件 的 4 0例 4 6条肌腱断 裂 伤患者 , 并与常规功能锻炼组 3 0例患者进行对 比研究 , 获取显 著疗效 , 现报告 如下 。
辅助性治疗手套在手外伤后功能康复中的应用
关 键 词 屈 曲 度 ; 关节 被 动 活动 度 : 助 性 治疗 手 套 辅
中图 分类 号 : 6 8 R 9 R 5, 43
文 献 标识 码 : A
文 章编 号 :0 1 1 4 (0 1 一 2 0 3 — 3 10 ~ 2 2 2 1 ) 0 — 1 2 0
T e a piain o du cie g vs i a d rh blainDA ig I in n ,Z AN Qi,e l h p l t fajn t l e n h n e a itt / ILn ,Y N Xa mig H G n ta c o v o i o
环 三 指 掌 指关 节 的 被 动 屈 曲度 的 增 加 值 较 对 照组 有 非 常 显 著 的差 异 (< .1 ; 疗 组 患 者食 、 、 、 指 各 关节 的 P 0 )治 0 中 环 小 主 动屈 曲度 的增 加 值 虽 均大 于 对 照组 , 差 异 无 显著 性 意 义 ( O 5 但 . ) 0
Chn s o r a f Re a itt n Me iie 0 1 62 :1 2 1 4 iee J u n lo h bl a i dcn ,2 1 ,2 () 3 — 3 i o
Absr c ta t
o jci :T be e tee eto w a n e ae ajnt egoe n at e ad psi ag fhn e— bet e oosr h f c f er g sl m d d ci lvso ci n as e rne o ad f x v v f i f u v v v l i n pt nswt h n yfnt n ae nu , n orsac h a t ad c n a vleo e g vs o i ai t i ad ds ci f ri r a dt eerh t sfy n l i l a ft l e. n e h u o t jy e e ic u h o
神经内科用手指康复锻炼手套[实用新型专利]
![神经内科用手指康复锻炼手套[实用新型专利]](https://img.taocdn.com/s3/m/ef71300b524de518974b7d91.png)
专利名称:神经内科用手指康复锻炼手套专利类型:实用新型专利
发明人:葛汝丽,陈方民
申请号:CN201120213907.8
申请日:20110615
公开号:CN202105148U
公开日:
20120111
专利内容由知识产权出版社提供
摘要:一种神经内科用手指康复锻炼手套,其包括手套,其特征是;所述手套背部设有主板,主板上设有多个挂钩,所述手套每个指尖部设有弹簧,弹簧另一端设有挂环,所述手套指尖部设有拉线,所述手套的手腕部位设有拉线集中孔和拉线套,拉线套端头设有松紧把手,拉线穿过集中孔和拉线套与松紧把手相连。
使用时将手套套到患者的手上,再将弹簧设有的挂环挂到主板的挂钩上,患者用另一只好手握住松紧把手,握紧使手指弯曲,松开由弹簧将手指拉直,反复操作就可达到促进血液循环,恢复手指功能的作用。
申请人:葛汝丽
地址:256600 山东省滨州市滨州医学院附属医院黄河二路661号
国籍:CN
更多信息请下载全文后查看。
康复手套控制系统方案设计流程
康复手套控制系统方案设计流程Designing a rehabilitation glove control system requires careful consideration of various aspects to ensure its effectiveness. 在设计康复手套控制系统时,需要认真考虑各个方面,以确保其有效性。
First and foremost, the design process should start with a thorough understanding of the target users and their specific needs. 首先,设计过程应该从深入了解目标用户及其具体需求开始。
This involves conducting research to gather information on the types of disabilities or conditions that the rehabilitation glove will be used to address, as well as the desired functionalities and user interface preferences of the target users. 这包括进行研究,收集关于康复手套将用于解决的残疾或病情类型,以及目标用户对所需功能和用户界面偏好的信息。
By gaining insights into the needs and preferences of the end users, the design team can develop a system that is tailored to their requirements, ultimately leading to a more successful and impactfulproduct. 通过深入了解最终用户的需求和偏好,设计团队可以制定一个更符合他们要求的系统,最终实现更成功和有影响力的产品。
自制护指手套的制作方法
自制护指手套的制作方法
制作自制护指手套需要以下材料:
- 布料
- 缝纫机或针线
- 剪刀
- 尺子
以下是制作方法:
1. 用尺子测量您的手的大小,然后将布料剪成与您的手相同大小的两个长方形。
2. 将两个长方形的边缘缝合在一起,留下一个小孔,以便在手套中插入手指。
3. 将手套反过来,使缝合的边缘在内部。
4. 将手指放入手套中,然后将手套的边缘折叠到手指的顶部,缝合手套的顶部。
5. 重复步骤4,直到所有手指都有自己的套子。
6. 缝合手套的顶部,然后将手套反过来。
7. 检查手套是否适合您的手,如果需要,可以用针和线调整手套的大小。
8. 最后将手套的边缘折叠并缝合,以便手套紧贴手腕。
这是一个简单的制作自制护指手套的方法,您可以根据自己的需要进行调整和改进。
创新医疗案例大赛获奖案例
创新医疗案例大赛获奖案例今天给大家讲讲那个超酷的创新医疗案例大赛的获奖案例。
有个团队搞出了一个超厉害的智能康复手套,这可不是一般的手套哦。
这个手套的诞生啊,得从一群特别有爱心又脑洞大开的小伙伴说起。
他们发现很多手部受伤或者有手部运动障碍的患者,康复训练特别枯燥又效果缓慢。
传统的康复方法就是简单地重复一些动作,患者很容易就没了耐心。
然后呢,这些聪明的家伙就想,为啥不能让康复变得有趣又高效呢?于是,智能康复手套就闪亮登场了。
这手套外观看起来就很有科技感,像是从未来穿越过来的一样。
它上面布满了各种微型传感器,这些小玩意儿可厉害啦。
当患者戴上手套开始进行康复训练的时候,传感器就能精确地捕捉到手部每一个细微的动作。
比如说,患者想要握拳,传感器就会立马知道手部肌肉的发力情况、关节的弯曲角度等各种数据。
然后呢,手套里内置的智能系统就像一个超级贴心的小教练一样,根据这些数据给出反馈。
如果患者的动作不太标准,它就会用一种很友好的声音说:“朋友,你的大拇指再弯一点就更完美啦。
”这可比那些严肃的康复师一直纠正要让人舒服多了。
而且哦,这个手套还带有游戏功能。
想象一下,患者不是在枯燥地做康复训练,而是在玩游戏。
比如有个“抓星星”的游戏,患者要通过正确地握拳、伸指等动作来抓取屏幕上的星星。
这样一来,患者在玩游戏的过程中不知不觉就完成了康复训练,积极性那是蹭蹭往上涨。
在医院里进行试用的时候,效果特别惊人。
有个老爷爷,手部受伤后好几个月康复进展都很慢,每次训练都愁眉苦脸的。
自从戴上这个智能康复手套玩了几天游戏式的康复训练后,他的手部功能恢复速度比之前快了好几倍。
老爷爷还特别开心地说:“这哪是康复啊,这就是玩嘛,太有意思了。
”这个案例之所以能在大赛中获奖,那是因为它完美地解决了传统康复中患者积极性不高、康复效果难以精确评估的问题。
它把高科技和人性化的关怀融合在了一起,就像给康复治疗打开了一扇通往新世界的大门,让患者看到了希望,也让整个医疗行业看到了创新的无限可能。
康复医疗产品的仿生设计程序
康复医疗产品的仿生设计程序
付晓莉;计越
【期刊名称】《工业设计》
【年(卷),期】2018(000)003
【摘要】为康复医疗产品的仿生设计提供设计理论依据与应用方法支撑.从产品与被仿生对象出发建立联系,对被仿生对象进行简化提炼.仿生设计在康复医疗产品中的应用,丰富了医疗产品的造型,增添了康复医疗产品的趣味性,满足了使用者的情感需求,更易被使用者接受同时使其更具市场竞争力.
【总页数】2页(P113-114)
【作者】付晓莉;计越
【作者单位】中原工学院;中原工学院
【正文语种】中文
【中图分类】TB472
【相关文献】
1.仿生学在儿童医疗产品情感化设计中的应用研究 [J], 史耀军;于航;姚佳
2.基于用户体验的老年康复医疗产品设计研究 [J], 贺露露;曾智林
3.基于仿生语义驱动的形态设计程序方法 [J], 宋明亮;孙元;刘建军;胡平
4.面向脑瘫儿童手功能康复的游戏化医疗产品设计研究 [J], 曹治萍
5.从生物到产品的仿生设计程序 [J], 杨丽英;孙宁娜;张文莉;董佳丽
因版权原因,仅展示原文概要,查看原文内容请购买。
应用于运动障碍患者手部精细动作康复训练的家用智能手套的研究
应用于运动障碍患者手部精细动作康复训练的家用智能手套的研究摘要:为了解决传统手部康复训练设备刚性结构容易使患者手部产生二次损伤以及康复训练过程缺乏趣味性,不能使患者主动参与到康复训练中,康复效果不佳的问题,设计了一款应用于手部康复的家用可穿戴智能康复手套系统。
智能康复手套利用所安装的各种传感器获得人体运动学、生理学数据,通过AI算法自动生成适合患者的“康复训练方案”并且可与医生实现数据共享,从而为医生改进和优化康复医疗方案提供客观依据。
关键词:手部康复训练、游戏化、家用智能康复手套0引言手部康复训练可以很大程度上帮助手部运动障碍患者手部功能的恢复,目前医院的治疗大多数采用理疗师与患者一对一的模式,由理疗师协助患者进行肢体功能康复训练。
传统的采用刚性结构的康复训练设备容易使患者手部产生二次损伤,而且康复训练缺乏趣味性,不能使患者主动参与到康复训练中,治疗效果受到影响。
患者在康复过程中家庭需要花费大量的金钱,大大影响了患者与家庭的正常生活。
因此,设计一款应用于手部康复的家用可穿戴智能康复手套系统非常必要。
1智能康复手套的研究现状智能康复手套目前存在发展方向多,面向不同患者的康复手套种类多,研究水平参差不齐。
韩国一家企业推出Rapael智能手套,是一款专门用来给手部功能障碍患者康复训练使用。
手套采用人体工程学设计,弹性体材料制造,轻便且易于清洁。
手套还可以评估患者当前的能力,并通过一套AI算法生成一套自合适的“康复训练方案”,让患者每天通过完成一些游戏任务动作来训练手部肌肉,帮助恢复手部机能。
同时手套内置传感器可以监测和追踪患者玩游戏时的表现,并记录有关数据。
但该康复手套的康复系统的康复方案单一,不能根据患者的康复情况随时改变且不能和医生保持随时畅联。
韩国的MAREF公司研制了一款康复设备: RELIVER RL-100 型手部康复训练仪,该仪器是利用波浪式空气压力,对患者手指/手腕进行强制运动,可以有效缓解手指与手腕的麻痹、瘫痪等症状。
康复手套工作原理
康复手套工作原理
康复手套是一种可以帮助残疾人进行活动的辅助设备,可以帮助手部运动功能障碍的
人重新掌握日常生活技能,并帮助改善肌肉失调。
康复手套的设计原理是通过提供强力反
向压力来增加肌肉力量和灵活性,使残疾人重新获得控制手部肌肉的能力,以尽可能地恢
复他们的手部功能。
康复手套的主要组成部分是手套本身和可调节的机械装置。
手套是康复手套的主要部分,通常由柔软的面料制成,如弹性材料、棉布或亚麻布,以确保舒适性和适当的透气性。
机械设施主要包括可调节的弹簧和扣环以及联动矩阵,这些机械设施可以轻松地根据残疾
人的手部情况和练习目标进行调整。
康复手套的工作原理基于增加手部肌肉功率和降低肌肉要求的阈值。
当使用康复手套时,手套的机械装置会施加反向压力,并通过调整弹簧和扣环的张力来增加手部肌肉力量。
当手套轻轻加压时,康复手套就可以起到稳定肌肉、降低肌肉能量需求的作用,从而在一
段时间内帮助残疾人恢复手部运动的感觉和控制能力。
此外,康复手套的机械装置还可以
降低肌肉过度紧张或疼痛,促进肌肉的舒适与放松。
康复手套工作原理的关键在于提供适当的反向压力,以实现肌肉力量和灵活性增加的
目标。
为此,康复手套的设计要考虑到身体某些区域对压力的敏感性和肌肉组织的生理特点。
例如,手腕和手臂肌肉通常更容易受到外部压力的影响,因此康复手套需要专门设计
来减少此类压力。
同样,手套的材料和机械装置的设计也需要考虑到肌肉组织的流动性和
几何形状,以确保手套的舒适性和使用效果。
手功能康复训练机器人产品技术要求标准2023年
手功能康复训练机器人1 范围本标准规定了手功能康复训练机器人的要求、试验方法、检验规则,标志、包装、运输与储存。
本产品规范适用于手功能康复训练机器人系列产品。
2 引用文件下列文件对于本文件的应用是必不可少的。
凡是注日期的引用文件,仅注日期的版本适用于本文件。
凡是不注日期的引用文件,其最新版本 (包括所有的修改单) 适用于本文件。
GB/T 191 包储运图示标志GB/T 2423.1 电工电子产品环境试验第 2 部分:试验方法试验 A:低温GB/T 2423.2 电工电子产品环境试验第 2 部分:试验方法试验 B:高温GB/T 2423.3 环境试验第 2 部分:试验方法试验 Gad:恒定湿热试验GB/T 4706.1 家用和类似用途电器的安全第 1 部分通用要求GB/T 4706.10 家用和类似用途电器的安全按摩器具的特殊要求,3 技术要求3.1 原材料a) 产品的外购件、外协件应符合有关标准的规定,所用元器件应洁净、无污染,对人体无害;b) 所有零部件应检验合格后方可装配。
3.2 外观结构a) 产品应洁净无污渍,产品外表面均应平整光滑,应无可能伤害人体的尖角、毛刺和飞边等;b) 预留孔洞边缘应光滑,无尖刺、倒钩、针感;c) 塑料件应塑化良好,无明显气泡、变形、划伤等缺陷;d) 金属表面涂覆应均匀、不起泡、无龟裂、脱落、磨损,金属件不应有锈蚀及其他机械损伤;e) 外观各类说明功能的标识文字图案及符号丝印应端正、清晰,标识功能与实际产品特性相符;f) 产品零部件应齐全、装配完整、正确,无错装、漏装等缺陷;固定连接的部位应连接可靠、牢固,无松动或脱落现象;g) 控制面板上的按键、开关应灵活、可靠、方便、易于操作且有功能标志;显示屏应显示清晰,无划痕、破损现象。
3.3 尺寸偏差产品各部件实际尺寸应与标示尺寸相符,允许偏差为±10%范围内。
如有特殊要求,可根据客户要求而定。
3.4 电源适应性产品应能在电源标称电压值的±10%范围内正常工作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
医疗设备信息
手功能康复仿生手套的研制
宋喜国,卢启宗
(第一军医大学珠江医院设备器材科,广东
广州
510282)
[摘
要]脊髓损伤或中风后瘫痪的肌肉可通过残存的运动神经接受电刺激,利用此原理可对手功能进行训练性康复治疗,改
善手功能。
为了使患者能够通过日常生活中的动作来训练手功能,作者设计了本文所述的仿生手套。
[关键词]脊髓损伤;仿生手套;康复[中图分类号]R496[文献标识码]B
[文章编号]1007-7510(2002)04-0011-01
Develo p ment of the bionic g love
SON G Xi-guo,L U Qi-zon g
(Depart ment of equipm ent and m at erial of Zh ujiang H ospit al affiliated to T he First M ilit ary M edical U niversit y,Guangzhou 510282,C hina)
Abstract:T h e paralyt ic m uscle can receive elect rical st im ulat ion t hough t he rem aining m ot or n erves aft er S CI or apoplex y.Based on t he fact,t he fun ct ion of han d can be t reat ed and im proved.T hus w e design th e bion ic glove by t hat t he patient can t rain his hand fun ction in daily life.Ke y words:SC I;bion ic glove;h ealing
[收稿日期]2002-02-06
图1仿生手套形状
1引言高位脊髓损伤(SC I)后,手功能自然恢复的概率很小,常规康复理疗方法也不能明显改善手功能,使个人生活自理能力和家庭生活受到严重影响。
临床上需要有新的方法和手段协助手功能康复,提高患者生活自理能力和生活质量。
脊髓损伤或中风后瘫痪的肌肉可通过残存的运动神经接受电刺激使其动作,这个特点为通过功能性电刺激或治疗性电刺激训练提供了机会。
2
设计思想
对于失去自主运动的患者,先由脉冲发生电路产
生脉冲信号刺激引起手腕运动的肌肉,通过残存的运动神经使手腕产生被动运动;对于手腕能自主运动的患者,则可省略这一步。
然后利用手套中位于手腕部位的线性位移传感器检测手腕的运动角度的变化,利用该变化值作为参量,控制单片机装置发出相应的指令,输出幅度可变的脉冲信号。
根据患者对刺激强度的反应程度调节适中的脉冲幅度,利用刺激电极对肌肉进行功能性电刺激,产生手的抓或放,从而达到辅助训练的目的。
3
设计原理及方法
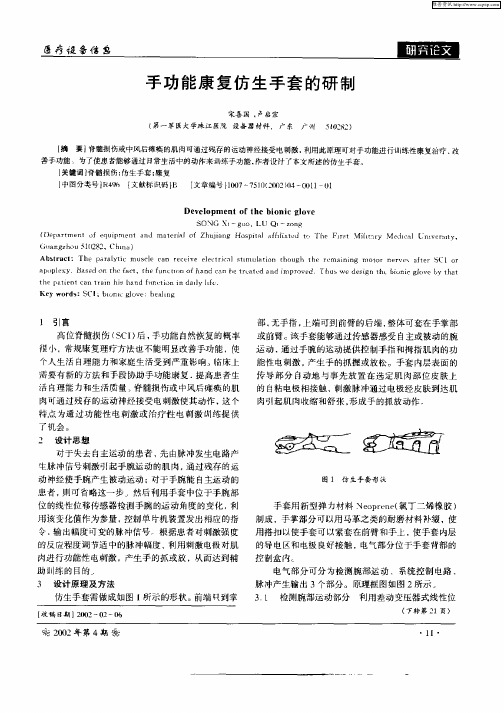
仿生手套需做成如图1所示的形状。
前端只到掌
部,无手指,上端可到前臂的后端,整体可套在手掌部或前臂。
该手套能够通过传感器感受自主或被动的腕运动,通过手腕的运动提供控制手指和拇指肌肉的功能性电刺激,产生手的抓握或放松。
手套内层表面的传导部分自动地与事先放置在选定肌肉部位皮肤上的自粘电极相接触,刺激脉冲通过电极经皮肤到达肌肉引起肌肉收缩和舒张,形成手的抓放动作。
手套用新型弹力材料N eo p r ene(氯丁二烯橡胶)制成,手掌部分可以用马革之类的耐磨材料补缀,使
用搭扣以使手套可以紧套在前臂和手上,使手套内层的导电区和电极良好接触,电气部分位于手套背部的控制盒内。
电气部分可分为检测腕部运动、系统控制电路、脉冲产生输出3个部分。
原理框图如图2所示。
3.1检测腕部运动部分利用差动变压器式线性位
(下转第21页)
研究论文
医疗设备信息
图2
电气原理框图
L S AM P
AN AL OG D IFF
PRO C I /O CA L M PU /87 DM S 。
转入、输出信号。
分析器分6个数据进行分析,流程是
RBC 计数:小孔 RBC PREAM P(x 1) RE D/WH T CT R 2 M PU /87 I /OCA L DM S 。
W BC 计数:小孔 W BC PREAM P(x 7.85) RE D/WH T CT R 2 M PU /87 I/O CAL DM S 。
PLT 计数:小孔 RBC PRE AM P(X 7.85) PLAT PROG PLAT A DC DAT AM EM PSM ON 2 M PU /87 I /OCAL DM S 。
H g b 计数:H GB LAM P I /OCA L =
DM S
M PU /87 DI LV T ER CON T RAL 3 H G -BLA M P 。
小孔烧灼电流:C RT /DI SP2 DL Y/A PERT C LN G A p er ture 。
分类数据:
RF 与DA PE RA M P
p si 为非法定单位,1p si=6.89 103Pa 。
in 为非法定单位,1in=2.54cm 。
编者注
图3差动变压器的电原理图移传感器检测手腕的运动(自主运动或被动运动)。
将手腕的角度运动转变为传感器内磁芯的线性位移,磁芯的线性位移引起线圈的互感变化,其原理如图3所示。
两个次级线圈L 2、L3接成差动式,输出电压e 是两次级线圈感应电压的差值,其大小在一定范围内跟磁芯的位移成线性关系,从而把手腕的运动变化反映到了e 的变化 e 上,完成手腕运动的检测。
3.2系统控制电路部分控制核心采用单片机装置。
该部分电路将传感器检测到的手腕角度变化的电压信号 e 进行交流放大,然后进行相位解调,区分出手腕角度变化的方向,再进行A /D 转换后送入中央处理单元,由中央处理单元根据输入信号的方向和大小分别产生脉冲控制信号和电极选择信号,脉冲控制信号经D/A 转换后驱动脉冲发生电路,完成控制功能。
3.3脉冲发生、输出部分
接收控制电路送来的脉
冲控制信号,根据控制信号的大小产生幅度不同的刺激脉冲,并根据电极选择电路分别送到不同的电极,刺激相应的肌肉产生抓或放的动作,完成整个过程。
4结论
根据常规功能性电刺激理疗装置的治疗结果,可以看到这种治疗方法能明显提高C6-C7脊髓损伤病人的手功能,因此这种仿生手套的研制从治疗角度上来看,其效果是没有问题的,仿生手套的研制主要是为了使病人能够在日常生活中通过腕部的自主运动达到手功能的康复。
[参考文献]
[1]P opovic D,St ojanovic A,Pjanovic A.Clinical
Evaluation of th e Bionic Glove.A rch Phys M ed Rehabil,1999,80:299-304.
[2]S ax ena S,N ikolic S,Popovic D.An E M G con trolled FES syst em for enh anced grasping in C5/C 6tetra p le g ics.J Reh abil Res Dev,1995;32:17-24.
[3]P roch azk a A,Gaut hier M,Wieler M ,Ken w ell Z.
T he Bionic Glove:An E lect rical St im ulat or G arm ent th at Provides Cont rolled Gras p and H and O p enin g in Quadri p le g ia.Arch P h y s M ed Rehabil,1997,78:608-614.
(上接第11页)仪器原理与使用。