装配线机械手电气混合控制
机械手电气控制系统设计说明
机械手电气控制系统设计摘要在工业生产和其他领域内,由于工作的需要,人们经常受到高温、腐蚀及有毒气体等因素的危害,增加了工人的劳动强度,甚至于危及生命。
自从机械手问世以来,相应的各种难题迎刃而解。
机械手可在空间抓、放、搬运物体,动作灵活多样,适用于可变换生产品种的中、小批量自动化生产,广泛应用于柔性自动线。
机械手一般由耐高温,抗腐蚀的材料制成,以适应现场恶劣的环境,大大降低了工人的劳动强度,提高了工作效率。
机械手是工业机器人的重要组成部分,在很多情况下它就可以称为工业机器人。
工业机器人是集机械、电子、控制、计算机、传感器、人工智能等多学科先进技术于一体的现代制造业重要的自动化装备。
广泛采用工业机器人,不仅可以提高产品的质量与产量,而且对保障人身安全,改善劳动环境,减轻劳动强度,提高劳动生产率,节约原材料消耗以及降低生产成本,有着十分重要的意义。
可编程控制器是继电器控制和计算机控制出上开发的产品,逐渐发展成以微器处理为核心把自动化技术、计算机技术、通信技术融为一体的新型工业自动控制装置。
本文应用三菱公司生产的可编程控制器FX系列PLC,实现机械手搬运控制系统,该系统充分利用了可编程控制器(PLC)控制功能。
使该系统可靠稳定,时期功能范围得到广泛应用。
关键字:机械手;自动化装备;可编程控制器;PLC目录摘要前言 (2)第1章设计目的及主要内容 (3)1.1设计目的 (3)1.2.主要内容 (3)第2章机械手的操作要求及功能 (4)2.1.操作要求 (4)2.2操作功能 (5)第3章 PLC及机械手的选择和论证 (6)3.1PLC (6)3.1.1 PLC简介 (6)3.1.2 PLC的结构及基本配置 (6)3.1.3 PLC的选择 (7)3.2机械手 (7)3.2.1机械手简介 (7)3.2.2机械手的选择 (8)第4章硬件电路设计及描述 (8)4.1操作方式 (10)4.2输入与输出分配表及I/O分配接线 (10)第5章软件电路设计及描述 (12)5.1机械手的操作系统程序 (12)5.2回原位程序 (12)5.3手动单步操作程序 (13)5.4自动操作程序 (14)5.5机械臂传送系统梯形图 (14)5.6指令语句表 (16)第6章总结 (17)参考文献 (18)前言大二的学习即将结束,课程设计是其中一个重要环节,是对以前所学的知识及所掌握的技能的综合运用和检验。
机械手功能实现及其控制方式设计

中图分类号 : 4 G6 2
文献标识码 : A
文章编号 :6 2 55 ( 0 0 - 2 0 17 — 4× 2 1 3 0 1— 2 2) 0
在 机 械 制 造 业 中 , 械手 应 用 较 多 , 展较 快 。 机 发
目前主要应用于机床 、模锻压力机 的上下料以及焊 接、 喷漆等作业 , 它可以按照事先制定 的作业程序完 成规定的操作 , 有些还具备有传感反馈能力 , 能应付 外界 的变化。应用机械手 , 有利 于提高材料的传送 、 工 件 的装 卸 、刀具 的更 换 以及 机 器的装 配 等 的 自动 化程度 , 从而可 以提高劳 动生产率 , 降低 生产成本 , 加快实现工业生产机械化和 自 动化的步伐。
收 稿 日期 :0 1 1— 9 2 1- 2 1
作者 简介 : 野( 9 8 ) 男 , 袁 18 ~ , 吉林珲春人 , 天津 工业大学机械工程学院 20 级 本科生 , 08 研究方 向是机械工程 自动化。
21 0
《 装备制造技术)02 2 1 年第 3 期 P C发出控制脉冲控制步进 电动机运转 ,实现手臂 33躯干部分 L . 躯干有底盘和手臂两部分组成。底盘是支撑机 的进给和定位 , 手爪采用气压驱动。各功能实现形式 械手的全部重量并能带动手臂旋转的机构 。底 盘采 与控 制 方式 。 用一个直流电动机驱动 ,底盘旋转时带动一个旋转 编码盘旋转 , 机械手每旋转三度发出一个脉 冲, 由传 3 机械 手各 部分功能与控制设计 感器检测并送入可编程控制器 ,从而计算底盘旋转 在底盘上装有 限位开关 , 最大旋转角 机械手的迅速发展是由于它的积极作用正 日益 的角度 。同时 , 度可达 10 8 度。手臂是机械手的主要部分, 它是支撑 为人们所认识。它能部分代替人工操作 , 因此 , 它能 工件使它们运动的机构。本设计手臂 由横轴 和 大大地改善工人的劳动条件 ,显著地提高劳动生产 手爪、 竖轴组成 、 可完成伸缩、 升降的运动 。手臂采用电动 率, 加快实现工业生产机械化和 自动化的步伐 。 机带动丝杠、 螺母来实现伸缩和升降运动。由可编程 31 机 械手 模型 的机 能和 特性 . 控制器发出信号控制步进 电机运转 ,同时在两轴 的 物体在三维空 间内的禁止位置是 由三个坐标 和 采用丝杠、 螺母结构传动 围绕三轴旋转的角度来决定的 , 因此 , 抓握物体的位 两端分别加限位开关 限位 。 位置精度较高 , 传动效率较高。 置 和方 向能从理 论 上求得 。根 据 资料 的介 绍 , 如果采 的特点是易于自锁 、
搬运机械手电气控制系统设计

目录第1章概述 (1)1.1 PLC简介 (1)1.2机械手概述 (1)1.3 机械手控制系统设计步骤 (2)第2章控制方案论证 (3)2.1 搬运机械手的设计原理 (3)2.2 PLC的选取 (4)第3章控制系统硬件电路设计 (7)3.1传送带A,B主电路图及传送带B的控制电路图 (7)3.2PLC控制面板及接口电路图 (8)第4章控制系统软件设计 (10)4.1控制系统的软件设计原理 (10)4.2梯形图 (12)第5章控制系统调试 (14)5.1 控制系统的调试过程 (14)总结 (15)参考文献 (16)附录 (17)第1章概述1.1PLC简介自二十世纪六十年代美国推出可编程逻辑控制器(Programmable Logic Controller,PLC)取代传统继电器控制装置以来,PLC得到了快速发展,在世界各地得到了广泛应用。
同时,PLC的功能也不断完善。
随着计算机技术、信号处理技术、控制技术网络技术的不断发展和用户需求的不断提高,PLC在开关量处理的基础上增加了模拟量处理和运动控制等功能。
今天的PLC 不再局限于逻辑控制,在运动控制、过程控制等领域也发挥着十分重要的作用。
通用PLC应用于专用设备时可以认为它就是一个嵌入式控制器,但PLC相对一般嵌入式控制器而方具有更高的可靠性和更好的稳定性。
实际工作中碰到的一些用户原来采用嵌入式控制器,现在正逐步用通用PLC或定制PLC取代嵌入式控制器。
1.2机械手概述工业机械手是近几十年发展起来的一种高科技自动化生产设备。
工业机械手是工业机器人的一个重要分支。
它的特点是可通过编程来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,尤其体现了人的智能和适应性。
机械手作业的准确性和各种环境中完成作业的能力,在国民经济各领域有着广阔的发展前景。
机械手技术涉及到力学、机械学、电气液压技术、自动控制技术、传感器技术和计算机技术等科学领域,是一门跨学科综合技术。
机械手电气控制系统设计

设计任务书设计目的:1、学习PLC电气控制系统的开发过程和系统设计思路;2、锻炼实际应用程序开发能力;3、提高电气制图、流程图绘制及办公文档编辑能力。
设计要求:1、基本要求:●设置机械手复位按钮●设置单步/连续切换开关2、提高要求编制四个驱动电机的保护程序。
要求自动检测电机是否处于堵转状态。
若电机处于堵转状态,应立即停止系统工作,并点亮故障报警灯;故障排除后,按下复位按钮,故障报警灯熄灭;连续运行模式下,统计传输工件的个数,存储于PLC的V型数据区,以备组态监控使用,也可用状态表监视其状态变化。
3、使用AutoCAD软件绘制系统电气原理图;4、使用MicroSoft Office Visio软件绘制软件流程图;5、绘制输入输出表(I/O表);目录1设计思路或方案选择 (4)1.1本系统的控制方案 (4)1.2 控制要求 (4)1.3系统各大功能 (5)1.3.1驱动系统 (5)1.3.2控制系统 (5)1.3.3执行机构 (5)1.4系统结构框图 (6)1.5PLC的定义 (6)1.6 PLC的特点 (7)2 硬件电路设计 (8)2.1电气原理图 (8)2.1.1输出驱动单元 (8)2.1.2输入检测单元 (9)2.1.3输入输出接口电路介绍 (9)2.1.4输入接口电路板 (9)2.1.5输出接口 (10)2.2 I/O分配表 (11)2.2.1为PLC的输入输出编址 (11)3软件设计 (12)3.1主流程图 (12)3.2复位子程序流程图 (13)3.3单步流程图 (15)3.4连续流程图 (16)4程序调试 (17)4.1 调试设备 (17)4.2遇到的问题与解决方法 (18)5 心得体会 (19)附录1参考文献 (20)附录2 程序清单 (21)摘要为工业机械手研制一个技术性能优良的控制系统,对于提高工业机械手的整体技术性能来说具有十分重要的意义。
本论文正是针对这一课题,选择了可编程控制器(PLC)作为工业机械手的控制系统,这对提升工业机械手的整体技术性能起到了良好的作用。
机器人机械手的有限元分析及相关控制的研究(长沙理工2014优秀论文)
第 1 关节
电机自带
结合机器人机械手的工作状况,选择如表 3-3 所示电机和减速机构。
3.4 机器人结构设计
图 3.3 各关节结构图
4 机器人关键部件的有限元分析
4.1 机器人关键部件有限元模型的建立
-3-
4.1.1 基座、大臂、小臂实体模型的简化 通常对于实体模型的细节进行一定的几何简化,尽量忽略一些不必要的细节,去除一些与分析意图影响不大的零件 及特征,以利于有限元分析。
-3
图 3.2 关节的极限位置图 3.2.2 各关节功率估算 电机功率计算采用公式 又有 n=ω×60/2 π 得到如下计算结果(单位 W) : 表 3-2 各关节极限力矩和功率计算结果 关节号 极限力矩(N·m) 计算功率(W) 7 2.400 12.0 6 3.213 32.1 5 3.675 30.6 4 26.435 164.2 3 22.638 189.3 2 51.451 430.1 1 64.345 750.3
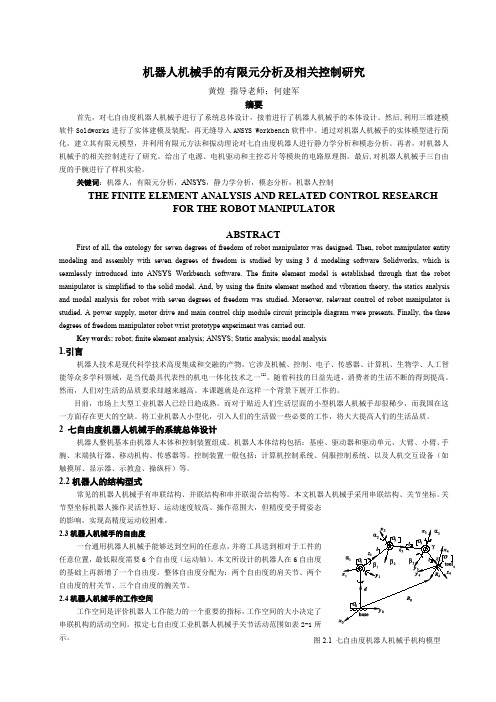
1.引言
机器人技术是现代科学技术高度集成和交融的产物,它涉及机械、控制、电子、传感器、计算机、生物学、人工智 能等众多学科领域,是当代最具代表性的机电一体化技术之一 。随着科技的日益先进,消费者的生活不断的得到提高。 然而,人们对生活的品质要求却越来越高。本课题就是在这样一个背景下展开工作的。 目前,市场上大型工业机器人已经日趋成熟。而对于贴近人们生活层面的小型机器人机械手却很稀少,而我国在这 一方面存在更大的空缺。将工业机器人小型化,引入人们的生活做一些必要的工作,将大大提高人们的生活品质。
(3-1)
极限位置的速度和加速度由表 2-2 所示。 (1) 第 7 关节力矩
图 3.1 第 7 关节传动示意图 -2-
第 6 关传动示意节图
装配线机械手电气混合控制

啊
I
装 配 线 机 械 手 电气 混 合 控 制
张现 强 王红涛 张宝 芳
( 山 东 中德发 酵 技术 有 限公 司 2 5 0 1 O 1 ) [ 摘 要] 由于我 国经济 与科 技 的深入 发展 , 在对 装配 线 机械 手 电气混 合控 制方 面 , 进 行 了科 学与合 理 方法 的革 新 , 能 够推动 电控系 统 的发展 。 为了 能够 适应 社 会 多元化 与 现代化 的发 展 , 其能够 对 自身进行 不 断的改 良与革 新 , 能够 在控 制方 面得 以新 的研 究 与推广 使用 。 装配 线机 械手 电气混合 控制 , 能够在实 际 的应用 与 操 作 中得 以工 作效率 与成 本的最 优投入 , 并能够 对 资源予 以合理 与优 化的配 置 , 将 先进的 技术 同工作 相结 合起来 , 创 造 出更大 的效益 。 本 文主要 是通过 对装 配线 机 械 手 电气 混合 控 制进 行系 统性 的 阐述 , 并 能够在 技 术领 域得 以新 技术 的推 广与 应 用 , 从而 提升 工作 效率 。 [ 关键 词] 装配 线机 械 手 ; 电气 混 合 ; 控制; 分析 中图分 类 号 : TU7 8 5 文 献标 识码 : A 文章 编号 : i 0 0 9 -9 1 4 X( 2 0 1 4 ) 2 9 — 0 0 8 1 0 1
安 全 与 可靠性 的提 升 。
运行 与作 业 的主控模 板 , 并 附之 以8 输入 与 8 输 出的扩展 模板 进行 实 际的作业 。 在实 际的 生产 与作业 中, 对 电控系 统的 操作 与应用 是这样 的 , 其 需要对 系统 工 作在启 动与 停止 的按 钮与各 个环 节 中气动 执行 中的极 限限位 开 关进行 参数 的 设定, 并能够 在 每个 环节 的参 数设 置 都有 能够 与之 相对 应 的端 子进 行搭 配使 用。 其系 统 中的被控 对象 是 电磁阀 中的 电磁铁 , 并 将其 分别 同对应 的可 编程控 制器 的端 子相 对应好 。 这样 一来 , 当技 术人 员进行启动 按钮 的同时 , 机械 手能够
机械手的设计

机械手的设计机械手是一种具有高度灵活性和准确性的自动化设备,广泛应用于工业生产线、医疗手术、装配和包装等领域。
机械手的设计需要考虑多方面因素,包括机械结构、电气控制和运动学算法等,下面我将从这几个方面详细介绍机械手的设计。
一、机械结构机械结构是机械手设计的核心,主要包括机械臂、关节和执行器三部分。
机械臂是机械手的主体,负责完成各种运动和动作。
关节是连接机械臂的组件,能够使机械臂在多个方向进行运动。
执行器负责将机械臂传输的运动信号转化为物理动作,例如抓取、旋转等。
机械结构的设计需要考虑以下因素:1. 功能需求:根据机械手的应用需求,确定机械手需要具备哪些功能和动作,例如抓取、旋转、移动等。
2. 机械臂的结构:机械臂的结构决定了机械手的可达性、波动和抗外力等性能。
通常有三种设计方式:串联式、并联式和混合式。
3. 关节和执行器选型:需要考虑负载、精度、速度、控制方式等因素,选择合适的关节和执行器。
4. 材料选择和加工:需要根据机械手的负载、速度和精度要求,选择合适的铝合金、碳纤维等材料,并采用先进的加工技术进行制造。
二、电气控制电气控制是机械手的另一个重要组成部分。
它负责将机械手进行的任何运动和动作转换为电信号,从而实现自动化控制和精确调节。
电气控制主要包括传感器、执行器和控制系统三个方面。
电气控制的设计需要考虑以下因素:1. 传感器:传感器能够感知机械手周围的环境信息,例如位置、速度、力矩等。
需要选择合适的传感器,避免传感器数据的误差,提高机械手的运动精度和稳定性。
2. 执行器:执行器是将电信号转换为物理动作的组件。
采用先进的执行器能够提高机械手的运动速度和精度。
3. 控制系统:控制系统是机械手的大脑,负责控制机械手的运动和动作。
需要采用先进的控制系统来保证机械手的运动稳定性和精度。
三、运动学算法运动学算法是机械手设计的重要组成部分。
它的作用是根据机械手的运动学模型,计算机械手各关节的运动轨迹和角度,从而实现机械手的各种动作和运动。
机械手电气控制系统设计

机械手电气控制系统设计电气控制系统是机械手的一个重要组成部分,它负责控制机械手的运动、姿态和工作程序等,以实现其预定的操作任务。
本文将结合实例,介绍机械手电气控制系统的设计思路和关键点。
1.设计思路1.1系统可靠性:机械手在工作过程中需要保证高度的可靠性和稳定性,电气控制系统的设计应考虑各种可能的故障,并采取相应的措施进行防护和容错处理。
1.2运动控制精度:机械手的运动需要高度准确的控制,因此电气控制系统应具备足够的精度,以确保机械手能够完成高精度的操作任务。
1.3灵活性和可扩展性:电气控制系统应具备良好的灵活性和可扩展性,能够适应不同的工作环境和任务需求,并能够方便地进行功能扩展和改进。
2.关键点2.1电气控制器选择:根据机械手的规模和需求,选择适当的电气控制器。
常见的选择包括PLC(可编程逻辑控制器)、DSP(数字信号处理器)等。
选择电气控制器时需要考虑其性能、功能、可靠性、扩展性和成本等因素。
2.2传感器选型:机械手的电气控制系统需要各种传感器来获取机械手关节的位置、速度、力矩等信息,以实现准确控制。
选择合适的传感器是电气控制系统设计中的关键环节,常用的传感器包括编码器、加速度计、光电传感器等。
2.3运动控制算法:机械手的运动控制是电气控制系统设计的核心,需要考虑机械手的运动规划、轨迹规划和动力学控制等问题。
常见的运动控制算法包括PID控制、模糊控制、遗传算法等,根据机械手的需求选择合适的算法。
2.4人机界面设计:为了方便操作和监控,机械手的电气控制系统需要设计一个人机界面,可以通过触摸屏、键盘、指示灯等方式实现对机械手的控制和状态显示。
3.实例分析以工业生产线上的机械手电气控制系统设计为例,该机械手需要完成从料盘上取出零件、装配、焊接等任务。
首先,选择PLC作为电气控制器,具备良好的可靠性和扩展性。
接下来,选择编码器作为关节位置传感器,通过读取编码器信号获取关节的实时位置信息。
针对机械手的运动控制,采用PID控制算法实现关节的位置和速度控制。
机械手自动控制设计

机械手自动控制设计摘要机械手是一种能够模拟人的手臂运动的工具。
通过自动控制机制,机械手能够实现精确的动作,广泛应用于工业生产线、医疗机器人和服务机器人等领域。
本文将介绍机械手自动控制设计的相关内容,包括机械手的结构和原理、自动控制系统的设计和应用场景等。
1. 机械手的结构和原理机械手由多个关节组成,每个关节可以作为一个独立的自由度进行运动。
常见的机械手结构包括串联型、并联型和混合型。
串联型机械手的关节依次连接,可以实现复杂的运动轨迹;并联型机械手的关节通过平行连接,可以实现较高的稳定性和刚度;混合型机械手采用串并联结构的组合,兼具了串联型和并联型的优点。
机械手的运动是由电机驱动的。
电机将电能转换为机械能,通过传动装置驱动机械手的关节运动。
常见的电机类型包括直流电机、步进电机和伺服电机。
直流电机结构简单,控制方便,适用于低功率和低速应用;步进电机能够精确控制转角,适用于高精度应用;伺服电机能够实现闭环控制,在高速、高精度应用中表现出色。
2. 自动控制系统的设计机械手的自动控制系统包括感知、决策和执行三个层次。
感知层负责获取环境信息,包括视觉、力觉和位置等;决策层根据感知信息做出决策,确定机械手的动作;执行层控制机械手的关节运动,完成决策层指定的任务。
2.1 感知层设计感知层主要通过传感器获取环境信息。
常用的传感器包括摄像头、力传感器和位置传感器等。
摄像头可以获取图像信息,用于机械手对工件的识别和定位;力传感器可以测量机械手与工件之间的力和压力,用于力控制和力反馈;位置传感器可以测量机械手的关节位置,用于位置控制和位置反馈。
2.2 决策层设计决策层主要包括机械手的轨迹规划和动作生成。
轨迹规划是指给定起始点和目标点,确定机械手的运动路线;动作生成是指根据轨迹规划生成机械手的具体动作序列。
常用的算法包括插补算法、路径规划算法和运动学算法等。
2.3 执行层设计执行层主要由控制器和执行器组成。
控制器通过对电机的控制来驱动机械手的关节运动;执行器负责将电机的转动转化为机械手的关节运动。
搬运机械手电气控制系统设计
搬运机械手电气控制系统设计搬运机械手电气控制系统设计搬运机械手是一种自动化机械装备,能够控制运动轨迹,用于在生产线上进行物品的搬运、装卸、堆垛、包装等作业,具有准确、高效、稳定等优点。
搬运机械手的电气控制系统设计是其中的重要组成部分,它直接影响到机械手的性能和使用效果。
本文将讲述如何进行搬运机械手电气控制系统的设计。
一、搬运机械手的结构搬运机械手主要由机身、控制系统、执行机构等部分组成,机械手主体通常由横梁、纵梁、立柱、斗臂、底座等构成。
执行机构包括伸缩、旋转、吸附、夹具等模块,用于实现机械手的各种运动和操作。
控制系统包括中央处理器、I/O接口、编码器、传感器、以太网通讯卡等部分,主要用于控制机械手的运行状态和操作。
二、搬运机械手的电气控制系统设计1.控制系统整体设计控制系统整体设计包括系统结构设计、功能划分和硬件选型等内容。
系统结构设计考虑到机械手的运动过程和操作需求,确定控制方式和信号交互方式。
功能划分将机械手的运动过程和控制指令划分为不同的模块,明确各模块之间的联系和执行顺序,确保系统运行流畅。
硬件选型主要考虑各种电路、元器件的规格、性能、可靠性和价格等因素,选用合适的硬件设备组成控制系统。
2.编码器和传感器选择编码器和传感器是机械手电气控制系统中非常重要的部分。
编码器用于测量机械手的位置、速度和加速度等信息,传感器用于检测机器人周围环境、工件属性和各种物理量。
编码器和传感器的选型需要考虑到测量精度、测量范围、重复性和稳定性等因素,保证机械手的运动状态和操作过程的精确可靠。
3.控制算法设计控制算法是机械手电气控制系统最核心的部分,主要包括运动控制算法和操作控制算法。
运动控制算法用于计算机械手的运动轨迹和速度变化等信息,包括PID控制、位移规划、插补算法等。
操作控制算法用于计算机械手的操作指令和指令执行顺序,包括工件识别、抓取规划、重心计算等。
控制算法的设计需要考虑到运算速度、精度和可靠性等问题,确保机械手能够按照预定的路径和指令执行。
装配线机械手电气混合控制

参考文献(3条) 1.徐永生 气压传动 2004 2.陈奎生 液压与气压传动 2001 3.吴振顺 气压传动与控制 1995
相似文献(5条) 1.期刊论文 李湘伟.卿艳梅.梁荣.LI Xiang-wei.QING Yan-mei.LIANG Rong 基于PLC控制的教学型五自由度气动机械手 的设计 -液压与气动2008,""(2)
文献标识码: 4
文章编号: (DAAE) CAAA:?BGB A@:AA?F:A@ 极限限位开关 *C 。 H 为 摆 动 气 马 达, 可实现机械手装 置的方位旋转, 更换操作工位, 机械手逆时针旋转极限 限位开关 /A , 机械手顺时针旋转极限限位开关 /C 。 生产工艺要求 该 气 动 机 械 手 的 动 作 逻 辑 顺 序 为: 立柱下降 0A ! 伸臂 4C ! 夹紧工件 $A ! 缩 臂 4A ! 立 柱 顺时针转 HC ! 立柱上升 0C ! 放 开 工 件 $C ! 立 柱 逆 时 针转 HA 。
收稿日期: $%%IC%GC!! 作者简介: 陈苏秧 ( !(M’ —) , 女, 浙 江 东 阳 人, 讲 师, 学 士, 主 要从事机电一体化教学、 科研工作。 图# 改造前的控制回路
文献标识码: L
文章编号: ($%%M) !%%%C&G)G %’C%%&GC%’ ! "$ 干燥塔的工作过程 (如图 !)
图! 收稿日期: DAAF:AB:A@ 基金项目: 国家自然科学基金 (GAGE?AEA) ; 湖北 省 教 育 厅 青 年 科学基金 ( IDAAFCCAA@) ; 武汉科技大学机械传动与制造工程省 重点实验室资助项目 (DAAG$A@) 作者简介: 陈新元 ( CJED —) , 男, 湖 北 省 武 汉 市 人, 副 教 授, 硕 士, 主要从事机 : 电 : 液一体化系统设计与仿真、 智能控制 研 究 和 教学工作。 气动机械手
电气控制及S7-1200-PLC应用技术-机械手控制

电气控制及S7-1200-PLC应用技术-机械手控制引言在现代工业生产中,机械手作为一种自动化设备,被广泛应用于物料搬运、装配等生产环节。
机械手的控制往往需要借助电气控制系统来完成。
本文将介绍电气控制及S7-1200-PLC 在机械手控制中的应用技术。
电气控制系统概述电气控制系统是将电力与信号传输技术相结合的控制系统。
它通过控制电气元件的通断、电气信号的传输与转换,实现对机械设备的控制。
在机械手控制中,电气控制系统起到重要的作用,实现机械手的各种动作和功能。
S7-1200-PLC简介S7-1200-PLC是西门子公司推出的一款小型可编程逻辑控制器。
它具有体积小、功能强大、可靠性高等特点,在工业自动化领域中有着广泛应用。
S7-1200-PLC集成了多个输入输出接口,可以实现与不同信号设备的连接和数据交互。
机械手控制的基本流程机械手控制的基本流程包括以下几个步骤:1.接收控制指令2.解析控制指令3.控制执行部件4.反馈信号处理5.实时监控控制过程6.故障诊断与处理电气控制及S7-1200-PLC在机械手控制中的应用技术1. 接收控制指令机械手控制的第一步是接收控制指令。
通常情况下,控制指令通过人机界面或上位机发送给PLC。
S7-1200-PLC通过其网络通信接口与上位机进行通信,接收控制指令。
2. 解析控制指令一旦接收到控制指令,S7-1200-PLC需要对其进行解析。
解析控制指令包括对指令的解码、转换和存储。
S7-1200-PLC 通过其内置的编程软件进行代码编写和组织,实现对控制指令的解析。
3. 控制执行部件机械手的运动控制往往需要通过执行部件来实现。
执行部件可以是电动机、气缸等。
S7-1200-PLC通过输出接口,控制执行部件的开关和状态。
4. 反馈信号处理机械手的运动过程中,需要对其执行部件的状态进行监测和反馈。
S7-1200-PLC通过输入接口,接收执行部件的状态信息,从而实现反馈信号的处理和监控。
LPD机械手电控操作说明
C-LPD机械搬运装置电控操作说明广州市寅源机械厂有限公司目录1、LPD机械手的控制面板 (2)2、控制柜操作 (3)2.1回原点 (3)2.2自动运行 (3)2.3手动运行 (3)2.4急停 (3)2.5复位 (3)3、故障处理 (4)附录1 (5)附录2 (6)1、LPD机械手的控制面板2、控制柜操作启动前把控制柜的各个开关都接通、急停按钮松开;2.1回原点:在自动启动之前,首先按回原点,原点指示灯开始闪烁,机械手开始自动找原点,当机械手打开、在上限位,水箱机械在上限位、推杆在后限位,原点指示常亮表示表示机械手回到原点,可以按启动按钮;2.2自动运行:把控制柜三档转换开关打到自动,在按自动启动按钮,运行指示灯亮起来即可。
运行过程,当接料盘有料时(信号由铸造机提供),机械手开始动作(具体看流程图:如图1-2)。
按下停止按钮,系统会在完成一个流程之后才停下来;2.3手动运行:把控制柜三档转换开关打到手动,当系统有故障时,可对每个机械手的各个动作进行单独手动测试。
可以检测出各限位开关是否到位,各个信号是否传到设备上,各机械是否有问题。
2.4急停:当机械手运行不正常时,控制柜上的急停按钮能实时控制机械手无条件停止。
2.5复位:把控制柜三档转换开关打到中间,在打回自动,按回原点,在按启动。
3、故障处理在流程图(图1-2)中可以清楚的看到每一步的动作受那几个条件的限制,当一个动作完成之后不进行下一个动作而报警灯又亮了,是因为各个限位开关的信号传不到plc。
如机械手抓完料回到中间位置而不会下降,从流程图(图1-2)中可以看出有可能是水箱机构没有到上限位,或推杆不在后限位(x31接通在上限位,x32接通在后限位)的信号有没有没传到plc。
不是输入信号问题的话就有可能是输出信号有问题,从plc输入输出端子表(表1-1)可以看出机械手上气缸的下降由y3控制,那就要看一下y3是否接通,要是接通的话就看从y3出来的线与电磁阀的连接是否有问题,(可以把3档转换开关打到手动,在按机械手下降,看机械手能不能正常的下降),要是手动能下降或自动时y3不接通就是程序的问题,复位在重新启动。
机械手电气控制系统设计分析
机械手电气控制系统设计分析摘要:机械手电气控制系统是自动化生产线中重要的组成部分,它实现了机械手的精确操作和运动控制。
本文从机械手电气控制系统的设计和分析方面入手,探讨了机械手电气控制系统中的主要设计要素、设计方法、运动控制和传感器等相关问题,并进行了详细阐述。
关键词:机械手,电气控制系统,设计要素,设计方法,传感器1.引言机械手电气控制系统是机械手的核心控制部分,它负责机械手的运动控制、力控制、位置控制等功能。
机械手电气控制系统设计的好坏直接影响机械手的性能和工作效率。
因此,对机械手电气控制系统进行设计和分析具有重要意义。
2.设计要素2.1控制器选择控制器是机械手电气控制系统的核心组成部分,负责控制机械手的运动和动作。
常用的控制器主要包括PLC控制器、PC控制器和单片机控制器等。
在选择控制器时,需考虑机械手的动作要求、控制精度和成本等因素。
2.2电机选择电机是机械手运动的驱动力源,常用的电机包括步进电机、直流无刷电机和直流有刷电机等。
在选择电机时,需要考虑机械手的负载要求、运动速度和精度等因素。
2.3传感器选择传感器是机械手电气控制系统中的关键设备,用于检测机械手的位置、力量、速度等参数。
常用的传感器包括位置传感器、力传感器和速度传感器等。
在选择传感器时,需考虑机械手的控制要求、传感器的精度和可靠性等因素。
3.设计方法3.1机械手建模机械手建模是机械手电气控制系统设计的基础工作,通过对机械手的结构和动力学性质进行建模,可以确定机械手的控制要求和所需设备参数。
3.2控制器设计控制器设计是机械手电气控制系统设计的核心内容,通过采用适当的控制算法和控制策略,可以实现机械手的精确运动和灵活控制。
3.3传感器配置传感器配置是机械手电气控制系统设计的重要环节,通过合理配置传感器,可以实现对机械手的力控制、位置控制和速度控制等功能。
4.运动控制5.传感器应用传感器在机械手电气控制系统中起到了关键作用,它能够实时监测机械手的运动状态,并将相关信息反馈给控制器。
机械手-电气控制
电气控制系统设计一. 1.机械手及其应用1.1机械手:模仿着人手的部分动作,按给定程序、轨迹和要求实现自动抓取、搬运或操作的自动机械装置。
在工业生产中应用的机械手被称为“工业机械手”。
它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
机械手主要由手部、运动机构和控制系统三大部分组成。
手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。
运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势。
运动机构的升降、伸缩、旋转等独立运动方式,称为机械手的自由度。
为了抓取空间中任意位置和方位的物体,需有6个自由度。
自由度是机械手设计的关键参数。
自由度越多,机械手的灵活性越大,通用性越广,其结构也越复杂。
一般专用机械手有2~3个自由度。
1.2机械手的应用意义在机械工业中,机械手的应用意义可以概括如下:1.可以提高生产过程的自动化程度应用机械手,有利于提高材料的传送、工件的装卸、刀具的更换以及机器的装配等的自动化程度,从而可以提高劳动生产率,降低生产成本,加快实现工业生产机械化和自动化的步伐。
2.可以改善劳动条件、避免人身事故在高温、高压、低温、低压、有灰尘、噪声、臭味、有放射性或有其它毒性污染以及工作空间狭窄等场合中,用人手直接操作是有危险或根本不可能的。
而应用机械手即可部分或全部代替人安全地完成作业,大大地改善了工人的劳动条件。
在一些动作简单但又重复作业的操作中,以机械手代替人手进行工作,可以避免由于操作疲劳或疏忽而造成的人身事故。
2.可以减少人力,便于有节奏地生产应用机械手代替人手进行工作,这是直接减少人力的一个侧面,同时由于应用机械手可以连续地工作,这是减少人力的另一个侧面。
因此,在自动化机床和综合加工自动生产线上,目前几乎都设有机械手,以减少人力和更准确地控制生产的节拍,便于有节奏地进行生产。
机械手电气控制系统的设计说明
井式加热炉抓取机械手电气控制系统的设计王强专业名称:自动化指导教师:斌讲师摘要工业机械手是一种仿人操作、自动控制、可重复编程且能在四维空间完成各种作业的机电一体化自动生产设备。
对稳定和提高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要作用,特别适合于多品种、变批量的柔性生产。
本课题主要任务是设计一抓取机械手来完成无人化工厂中某一阶段性工作。
机械手系统采用圆柱坐标方式,由PLC作为中央控制单元,控制三路交流伺服驱动器、位置单元模块与其它功能块,驱动各轴伺服电机准确定位。
定位完成后,再执行手部抓取动作,以完成指定任务。
设计了上位机组态,方便人们监视现场运行情况以与实现故障准确定位,并简单叙述系统参数设置与调试方法。
本文重点解决的问题——电气控制系统设计本课题中主要容:(1)机械手方案设计与驱动电机选型;(2)电气控制系统硬件线路设计;(3)控制系统程序设计;(4)上位机组态设计与系统调试;关键词:机械手交流伺服控制器 PLC 组态松下AbstractIndustrial machinery hand is a fake person operation, automatic control, programmable and can complete all kinds of operations in four-dimensional space electromechanical integration automatic production equipment. To stabilize and improve product quality, improve production efficiency, improve labor conditions and the rapid upgrading of products plays a very important role, especially suitable for many varieties, varying quantities of flexible production.The main task is to design a gripping manipulator to complete no chemical plant in a phased work. Manipulator system using a cylindrical coordinate, by PLC as the central control unit, control of three AC servo driver, position unit module and other functional blocks, the axis servo motor positioning. Positioning is completed, then the execution of hand grasping movements, to complete the assigned task. Design of PC configuration, convenient for people to monitor the site operation and the realization of accurate fault location, and briefly narrates system parameter setting and debugging method.This paper focus on solving problems -- electrical control system designIn this paper the main contents:(1) manipulator design and drive the motor selection;(2) the electrical control system hardware circuit design;(3) the control system program design;(4) PC configuration design and system debugging;Key words: manipulator, Panasonic, ACservo controller, PLC, configuration目录摘要2Abstract3目录5前言71 绪论91.1机械手概况91.2 机械手简史91.3 机械手发展状况101.4 简述机械手分类111.5 机械手发展趋势131.6 本课题任务132 抓取机械手方案设计152.1机械手总体结构设计与基本参数152.2手部结构设计162.3机械手移动基座设计182.3.1基座设计182.3.2 基座伺服电机选型192.4 升降系统机构设计212.4.1 升降机构设计212.4.2 升降伺服电机选型223 机械手电气控制系统设计243.1 伺服电机与驱动器简介243.1.1 交流伺服电机243.1.2 伺服控制器253.2 机械手电气系统设计273.2.1主电路设计273.2.2控制电路设计294 机械手控制系统设计334.1 可编程逻辑控制器334.2 系统I/O点数与地址分配374.3系统程序设计394.3.1 加热炉放料程序设计404.3.2 加热炉取料与淬火程序设计46 5上位机组态与系统调试495.1 组态概念介绍495.2 机械手系统组态设计50总结52致53参考文献54 附录一55 附录二56前言用于再现人手的的功能的技术装置称为机械手。
装配线机械手电气混合控制 蔡业福

装配线机械手电气混合控制蔡业福摘要:气动传动系统具有良好的清洁度和较低的成本,非常适用于易燃易爆领域。
系统的应用为集中供气提供了更多的便利,在工业生产领域得到了广泛的应用。
电动混合控制系统可以改变可编程控制器的控制程序,在不改变硬件设备的情况下,满足各种生产过程的实际需要,保证生产线运行的灵活性。
它对产品更新速度较快的工业生产领域具有重要影响,是促进工业生产领域发展的一项重要技术。
关键词:装配线机械手;电气混合控制;前言:随着科学技术的不断发展,工业自动化也取得了很大的进步。
工业生产中使用的机械手种类越来越多,有效地提高了生产效率,降低了工人的劳动强度,使工人从危险劳动中解放出来。
为了充分发挥气动和电气控制的优点,电力混合控制在机械手控制中的应用越来越多。
可以进一步提高机械手的工作效率,更好地完成交给机械手的任务,有效降低传统机械手的故障率。
一、有关相关理论在电动混合控制机械手中,通常有两套控制系统,一套是气动控制系统,另一套是机械控制系统。
机械系统一般采用全伺服控制方式,由控制器、伺服系统和机械部分组成。
控制器通过分析各种位置命令来确定实际位置。
将其分解为各关节的实际位移,通过控制伺服系统完成各种位移动作。
气动系统采用气动控制方式,主要由控制器、气动控制系统和气动机械三部分组成。
控制器还将各种控制指令转换为气动元件的实际位移。
气动控制使气动机械通过打开和关闭气动回路来完成规定的动作。
在过去,气动传动系统经常用于机械制造行业,半导体行业,其结构与整机相比简单,整个系统运行可靠性高。
由于内部没有复杂的电路,所以在高温易燃的环境中工作是合适的。
如果使用一个机器人的控制模式混合动力机械和气动控制两个系统的优势,可以有效地利用和机械运动的迅速和准确定位,可以迅速实现用一场定位高精度伺服-机械系统。
气动系统的优点是可以调节出料力,可以有效地保持物体,避免损坏。
随着混合控制系统的引入,机器的应用范围大大扩大,运行效率也提高了,从而避免了超载。
机械手抓物电气控制系统设计

电气控制与PLC课程设计题目: 机械手抓物电气控制系统设计 ______________ 院系名称:__________ 电气工程学院 ____________________________ 专业班级:_________ 自动化1003 ______________________ 学生姓名:_________________________________________学号:______________________________________________指导教师:_____________ 张杰 ______________________________ 成绩:指导老师签名:目录1 系统描述及控制要求. (3)1.1 系统描述 (3)1.2 控制要求 (4)1.3 注意事项 (5)2 设计方案. (5)2.1 方案论证 (5)2.2 原器件选择 (6)3 I/O 分配表 (6)4 外部接线图. (8)4.1 I/O 接线图. (8)4.2 主电路图 (9)5 梯形图. (10)6 系统调试. (13)设计心得. (15)参考文献. (16)1 系统描述及控制要求1.1 系统描述机械手是在机械化、自动化生产过程中发展起来的一种新型装置。
近年来,随着电子技术特别是电子计算机的广泛应用,机器人的研制和生产已成为高技术领域内迅速发展起来的一门新兴技术,它更加促进了机械手的发展,使得机械手能更好地实现与机械化和自动化的有机结合。
机械手虽然目前还不如人手那样灵活,但它具有能不断重复工作和劳动、不知疲劳、不怕危险、抓举重物的力量比人手大等特点。
机械手可在空间抓、放、搬运物体,动作灵活多样,适用于可变换生产品种的中、小批量自动化生产,广泛应用于柔性自动线。
在机械制造业中,机械手已被广泛应用,从而大大地改善了工人的劳动条件,显著的提高劳动生产率,加快实现工业生产机械化和自动化的步伐。
机械手一般由耐高温,抗腐蚀的材料制成,以适应现场恶劣的环境,大大降低了工人的劳动强度,提高了工作效率。
机械手设计电气控制部分
第3章机械手的电气控制系统设计3.1 机械手电气控制系统的概述机械手的定位系统采取定位块定位,在设定位置装置定位块。
并为了达到缓冲的目的,在满足工作要求的前提下,设计尽量轻的零部件。
比如将某些铸钢件改用铝合金制造,或者将一些实心的零件做成空心的,以此来减轻总质量。
采取PLC程序控制,控制系统选择三菱公司的FX1S系列的PLC控制器。
另外机械手还可进行但不运行及回零等,其有手动控制方式和全自动控制自动生产线机械手的主要参数: 臂力5N;自由度数为4;运动形式为圆柱坐标;长度(未伸缩)943mm;高度(未升起)为532mm,手臂伸缩行程范围0—500mm,手臂伸缩速度为250mm/s,手臂升降行程范围0—300mm;手臂升降速度为150mm/s;手腕回转行程范围~0,900,手腕回转速度为135°/s;大臂回转角度范围90~大臂回转速度为135°/s;定位方式为定位块;定位精度为m m;控制方式1.0为点位式、PLC控制;驱动方式为液压系统。
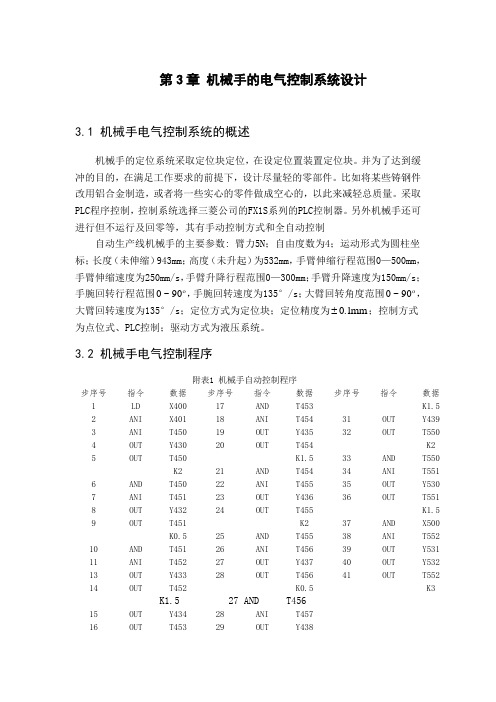
3.2 机械手电气控制程序附表1 机械手自动控制程序步序号指令数据步序号指令数据步序号指令数据1 LD X400 17 AND T453 K1.52 ANI X401 18 ANI T454 31 OUT Y4393 ANI T450 19 OUT Y435 32 OUT T5504 OUT Y430 20 OUT T454 K25 OUT T450 K1.5 33 AND T550K2 21 AND T454 34 ANI T5516 AND T450 22 ANI T455 35 OUT Y5307 ANI T451 23 OUT Y436 36 OUT T5518 OUT Y432 24 OUT T455 K1.59 OUT T451 K2 37 AND X500K0.5 25 AND T455 38 ANI T55210 AND T451 26 ANI T456 39 OUT Y53111 ANI T452 27 OUT Y437 40 OUT Y53213 OUT Y433 28 OUT T456 41 OUT T55214 OUT T452 K0.5 K3K1.5 27 AND T45615 OUT Y434 28 ANI T45716 OUT T453 29 OUT Y438K2 30 OUT T4573.3 机械手电气控制系统图3.3.1 自动控制系统图图3.1 机械手自动控制系统图上图为机械手自控控制系统图,他的指令采用FX1S的专用PLC控制器控制,他的工作顺序是按照上图中大臂下降开始直至最后一次大臂回转为完成一个完整的工作周期,每个工作段所用的时间在上图均已标明,从系统启动到结束程序,除非系统受到X500停车指令,否则系统均通过各个时间控制器来完成精确的控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
装配线机械手电气混合控制
陈新元,张安龙
!"# $%%#&’(# )#*"+,-*+( .+,/ 01&’-,#/ 01,231( 4+%#/ 1, 5(#*231, +,/ 63#7&+2-*
0.58 9-,:;7+,,<.$8= $,:(1,>
(武汉科技大学 机械自动化学院,湖北 武汉 ?@AABC 电话: (ADE)F@DEDCFD)
装配线机械手电气混合控制
作者: 作者单位: 刊名: 英文刊名: 年,卷(期): 被引用次数: 陈新元, 张安龙, CHEN Xin-yuan, ZHANG An-long 武汉科技大学,机械自动化学院,湖北,武汉,430081 液压与气动 CHINESE HYDRAULICS & PNEUMATICS 2007(3) 2次
收稿日期: $%%IC%GC!! 作者简介: 陈苏秧 ( !(M’ —) , 女, 浙 江 东 阳 人, 讲 师, 学 士, 主 要从事机电一体化教学、 科研工作。 图# 改造前的控制回路
文献标识码: L
文章编号: ($%%M) !%%%C&G)G %’C%%&GC%’ ! "$ 干燥塔的工作过程 (如图 !)
图! 收稿日期: DAAF:AB:A@ 基金项目: 国家自然科学基金 (GAGE?AEA) ; 湖北 省 教 育 厅 青 年 科学基金 ( IDAAFCCAA@) ; 武汉科技大学机械传动与制造工程省 重点实验室资助项目 (DAAG$A@) 作者简介: 陈新元 ( CJED —) , 男, 湖 北 省 武 汉 市 人, 副 教 授, 硕 士, 主要从事机 : 电 : 液一体化系统设计与仿真、 智能控制 研 究 和 教学工作。 气动机械手
5) 可编程控制器程序第三节
万方数据 序如图 4$ 1 45 所示。
图!
控制程序
&G
液压与气动
$%%M 年第 ’ 期
" " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " "
#) 可编程控制器程序第一节
$) 可编程控制器程序第二节 $)电气控制线路
")模拟实验装置
图"
机械手电控线路和实验装置
根据机械手动 作 工 艺 要 求 和 气 动、 电气控制系统 的设计, 编写了相 应 的 控 制 程 序, 并 在 图 #" 所 示 某 公 司培训试验台上进行了模拟试验, 机械手运行正常, 动 作符合预定要求, 其 +,& 3 (!. 型可编程控制器控制程
参考文献: [!] 徐永生 " 气压传动 [ #] 机械工业出版社, " 北京: $%%& " [$] 陈奎生 " 液压与气压传 动 [ #] 武汉理工大学业出 " 武 汉: 版社, $%%! " [’] 吴振顺 " 气压传动与控 制 [ #] 哈尔滨工业大学 " 哈 尔 滨: 出版社, !(() "
参考文献(3条) 1.吴振顺 气压传动与控制 1995 2.陈奎生 液压与气压传动 2001 3.徐永生 气压传动 2004
本文读者也读过(3条) 1. 陈新元.曾良才.陈奎生.周云根 液压设备虚拟样机设计平台研究[期刊论文]-系统仿真学报2004,16(7) 2. 陈新元.陈奎生.曾良才.付连东.CHEN Xinyuan.CHEN Kuisheng.ZENG Liangcai.FU Liandong 电液伺服激振系统设计 与仿真[期刊论文]-机床与液压2006(12) 3. 鞠鹏.王春霞.黄跃进.Peng Ju.Chun-xia Wang.Yue-jin Huang "即时技术"(JIT)概念在新型冰箱门体发泡自动线研制 中的应用[期刊论文]-家电科技2005(5)
! "$ "!
; 塔工作, L 塔再生
压缩机湿空气经空气分离器, 进行水分分离后, 流 过棱阀进入干燥塔 ;, 在 ; 塔内, 空气中的水分被塔内 的干燥剂吸附, 干燥后的空气流到顶部分成 $ 个支流, , 过滤后供用户 一部分通过棱阀流至过滤器 (约 G) P )
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
?F
液压与气动
DAAE 年第 @ 期
" " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " "
#&&% 年第 4 期
液压与气动
)%
! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! 根据上述分析和动作要求, 我们设计空气压缩机、 干燥器、 过滤器、 减压阀、 压力表、 油雾器作为系统气压 源, 选用电磁换向阀作为主要控制元件, 实现各执行机 构动作的切换, 另外 在 为 了 调 节 各 执 行 机 构 的 动 作 速 度, 在其进 排 气 口 分 别 设 置 单 向 节 流 阀, 进行速度调 节, 气动系统简图如图 !" 所示。 ! 装配线机械手电控系统及程序设计 装配机械手程 序 控 制 主 要 由 可 编 程 控 制 器 完 成。 根据机械手及气动系统设 计 统 计 (见 图 #$ ) , 电气控制 节点共有 !% 个, 其中 !& 输入点, 输入输出 % 个输出点, 供电电 压 为 ’(#)*, 因 此 我 们 选 用 松 下 +,&-(!. 可 编 程控制器作为主 控 模 块, 另加一块 / 输入 / 输出的扩 展模块。电控系 统 原 理 如 图 #$ 所 示, 系 统 工 作 启 动、 停止按钮以及各气动执行机构的极限限位开关作为可 编程控制器的输入, 分别接在 0& 1 0% 、 0#& 1 0#! 地 址 对应的端子; 电磁阀的电磁铁作为被控制对象, 分别接 在可编程 控 制 器 的 输 出 2#& 1 2#. 地 址 对 应 的 端 子 上。按下启动按钮, 机械手按照前面所规定的工序循 环工作, 直到按下停 止 按 钮, 机 械 手 停 止 工 作, 并恢复 到初始准备状态。
引证文献(2条) 1.彭庆红 自动化二极管端子装配线的研制[期刊论文]-组合机床与自动化加工技术 2011(2) 2.陶湘厅.袁锐波.罗璟 气动机械手的应用现状及发展前景[期刊论文]-机床与液压 2007(8)
文献标识码: 4
文章编号: (DAAE) CAAA:?BGB A@:AA?F:A@ 极限限位开关 *C 。 H 为 摆 动 气 马 达, 可实现机械手装 置的方位旋转, 更换操作工位, 机械手逆时针旋转极限 限位开关 /A , 机械手顺时针旋转极限限位开关 /C 。 生产工艺要求 该 气 动 机 械 手 的 动 作 逻 辑 顺 序 为: 立柱下降 0A ! 伸臂 4C ! 夹紧工件 $A ! 缩 臂 4A ! 立 柱 顺时针转 HC ! 立柱上升 0C ! 放 开 工 件 $C ! 立 柱 逆 时 针转 HA 。
摘
要: 该文介绍了装配线机械手结构、 动作要求和顺序逻辑, 在此基础 上 设 计 了 气 压 传 动 系 统 原 理 和
相应电控系统原理, 编写了控制程序, 并在日本某公司培训试验台上进行了模拟试验。 关键词: 气压传动;可编程序控制;气动机械手 中图分类号: !.C@B ! 概述 气压传动系统因其具有清洁、 价格低廉、 执行元件 运动速度快、 能安全可靠地应用于易燃易爆场所、 便于 集中供气等优点, 被广泛应用于汽车制造业、 半导体电 子及家电行业、 加 工 制 造 业、 包 装 业、 机 器 人。 电 气 混 合控制系统通过修 改 可 编 程 控 制 器 中 的 控 制 程 序, 能 够在硬件设备基本不改变的情况下完成不同的生产工 艺, 使生产线具有很好的柔性, 这一特性对产品更新换 代快的行业, 如汽 车 制 造 业 等 显 得 尤 为 关 键。 这 些 促 进了气动工业的长足发展和气动系统的广泛应用。 " 装配线机械手结构动作分析及气动回路设计 装配机械手是自动生产线上应用极为广泛的一种 设备, 其驱动主要是由气动系统完成, 控制逻辑主要由 可编程控制器程 控 产 生。 文 中 符 号 说 明: 大写英文字 母表示气动 执 行 元 件 编 号, 如 $ 等; 大写英文字母加 小写 下标表示该气动 执 行 机 构 的 动 作 编 号, 如 $A 等; 英文字母加下标表示气动执行元件运动极限限位开关 编号, 如 +A 等。 图 C+ 所 示 为 某 专 用 设 备 上 的 气 动 机 械手 结 构 示 意 图。 它 由 @ 个 气 缸 $、 4、 0 和 C 个摆动 气马达 H 组成。其中 $ 为气 动 手 指, 其活塞杆收缩时 机械手指能夹紧, 实现抓取工件动作, 气动手指的抓紧 极限限位开关 +A ; 完 $ 缸活塞杆伸出时机械 手 指 松 开, 成释放工 件 动 作, 气 动 手 指 的 释 放 极 限 限 位 开 关 +C 。 可实现机械手的伸长和缩短动 4 缸为机械手 伸 缩 缸, 机械手伸长极限限 作, 机 械 手 缩 短 极 限 限 位 开 关 ’A , 位开关 ’C 。 0 缸 为 机 械 手 立 柱 升 降 缸, 能实现机械手 万方数据 机械手长高 高度的调整, 机械手降低极限限位开关 *A ,