基于数字图像技术的汽车行驶轨迹状态识别
基于图像处理的交通场景行为分析与意图识别

基于图像处理的交通场景行为分析与意图识别随着城市交通环境的不断发展和人们对交通的需求日益增加,交通场景行为分析与意图识别技术变得尤为重要。
这项技术利用图像处理和深度学习算法,对交通场景中的行为进行识别和分析,从而能够实现智能交通系统、自动驾驶和交通安全等方面的应用。
在交通场景行为分析中,我们首先要了解交通场景中常见的行为类型。
例如,行人的行走、等待和横穿马路;车辆的加速、减速和换道;红绿灯的信号变化等。
通过对这些行为的分析,可以提取出图像中的关键特征,如运动轨迹、速度和加速度等。
基于图像处理的交通场景行为分析通常包括以下步骤:1. 图像采集和预处理:通过摄像机等设备获取交通场景的图像,并对图像进行去噪和增强等预处理操作,以提高后续分析的准确性。
2. 目标检测和跟踪:利用目标检测算法识别出图像中的行人、车辆和信号灯等目标,并利用跟踪算法跟踪它们的运动轨迹。
常见的目标检测算法包括基于特征的方法和基于深度学习的方法。
3. 行为识别和分类:通过分析目标的运动轨迹和行为模式,将它们归类为不同的行为类型,如行人的行走、等待和横穿马路,车辆的加速、减速和换道等。
这可以通过经验规则、机器学习和深度学习等技术实现。
4. 意图推理和识别:基于已有的行为模型和规则,利用机器学习和深度学习等技术推理出行为的意图,例如预测行人是否打算横穿马路或车辆是否打算变道等。
交通场景行为分析与意图识别具有广泛的应用前景。
首先,它可以应用于智能交通系统,帮助交通管理部门更好地掌握交通流量和拥堵信息,优化道路配时和交通路线。
其次,它可以应用于自动驾驶技术,通过对交通场景行为的识别和分析,使自动驾驶车辆能够更准确地感知和应对周围环境的变化。
此外,交通场景行为分析还可以用于交通安全监控,例如预测交通事故并提前预警。
然而,基于图像处理的交通场景行为分析与意图识别也面临一些挑战。
图像采集质量的问题可能会导致不准确的目标检测和跟踪结果。
交通场景的复杂性和多样性也增加了行为识别和分类的困难。
基于人工智能的车辆轨迹预测技术研究
基于人工智能的车辆轨迹预测技术研究随着社会经济的发展和人们生活水平的提高,交通工具已成为现代生活不可或缺的一部分。
其中,车辆作为主要的交通工具之一,已成为了很多人的首选。
但与此同时,车辆的行驶也不可避免地会涉及到一些安全问题,尤其是在道路行驶时,车辆轨迹的预测便成了一项重要的技术。
近年来,随着人工智能(AI)技术的不断发展,基于人工智能的车辆轨迹预测技术也日益成熟,大大提高了车辆行驶的安全性。
一、车辆轨迹预测技术的基本概念车辆轨迹预测技术是指通过收集车辆行驶过程中的相关数据信息,对车辆在未来一段时间内的运动轨迹进行预测。
其基本原理是通过AI算法对车辆的历史轨迹数据进行分析,得出车辆当前及未来行驶轨迹的可能性,从而辅助驾驶员更好地控制车辆,进而提高车辆的行驶安全性。
二、车辆轨迹预测技术的应用场景车辆轨迹预测技术在现代交通中有着广泛的应用,其中主要包括以下几个方面:1.自动驾驶技术随着自动驾驶技术的快速发展,车辆轨迹预测技术在自动驾驶系统中扮演着不可替代的角色。
自动驾驶系统通过预测车辆的行驶轨迹,可预测车辆行驶中出现的潜在危险,并在行驶过程中及时通过车辆控制模块进行路况调整,从而保证车辆行驶的安全性。
2.交通流优化车辆轨迹预测技术还可应用于交通流优化中,通过对车辆轨迹进行预测,分析车辆的行程、车速等信息,实现交通路线和交通信号优化,减少交通堵塞现象的发生。
3.行车辅助车辆轨迹预测技术也可应用于行车辅助系统中,通过AI算法对车辆的行驶轨迹进行预测和分析,为驾驶员提供实时行车建议,辅助驾驶员更好地控制车辆,从而有效提高车辆行驶安全性。
三、车辆轨迹预测技术的发展现状目前,国内外已有许多研究机构和企业开始关注人工智能技术在车辆轨迹预测中的应用。
例如,谷歌旗下的Waymo自动驾驶汽车公司,便是以AI为核心技术研究和开发自动驾驶技术的企业之一。
此外,国内也有不少公司开始涉足人工智能驾驶技术领域,如百度、腾讯、滴滴等。
智能交通系统中的车辆轨迹识别技术详解
智能交通系统中的车辆轨迹识别技术详解近年来,随着城市交通的日益繁忙和车辆数量的增加,如何高效管理道路资源、提升交通效能成为了亟待解决的问题。
而智能交通系统的出现,为解决交通管理难题带来了新希望。
其中,车辆轨迹识别技术作为智能交通系统的重要组成部分,正在逐渐成为交通管理的核心技术。
一、车辆轨迹识别的基本原理车辆轨迹识别技术可以通过分析车辆在道路上的运动轨迹,实时获取车辆相关的信息,如车辆速度、行驶路径、行驶方向等。
这些信息可以通过视频监控系统、传感器等设备来采集,并通过图像与信号处理等技术进行分析提取。
二、基于图像处理的车辆轨迹识别技术在智能交通系统中,图像处理是最常用的车辆轨迹识别技术之一。
通过使用高清摄像机拍摄道路场景,并利用计算机视觉技术对图像进行处理,可以实现对车辆轨迹的准确识别与分析。
在图像处理过程中,需要借助车辆检测、车辆跟踪和车辆识别等算法来实现。
三、基于雷达技术的车辆轨迹识别技术除了图像处理技术外,雷达技术也被广泛应用于车辆轨迹识别中。
雷达可以通过发射无线电波并接收其回波来感知车辆的位置与速度。
相较于图像处理技术,在复杂的天气条件下,雷达能够提供更可靠的数据。
同时,雷达还可以实时监测车辆的速度与加速度等参数,为交通管理提供更精准的信息。
四、车辆轨迹识别技术在智能交通系统中的应用车辆轨迹识别技术在智能交通系统中有着广泛的应用前景。
首先,通过实时监测车辆的轨迹,交通管理者可以掌握道路交通状况,进一步优化交通信号控制,减少交通拥堵。
其次,车辆轨迹识别技术还能应用于交通事故的预警与监测,通过及时发现异常轨迹,可以快速采取措施,有效避免交通事故的发生。
另外,车辆轨迹识别技术还可以用于交通统计分析、违法监测等方面,进一步提升交通管理的效能。
五、车辆轨迹识别技术面临的挑战与未来发展虽然车辆轨迹识别技术在智能交通系统中已取得重要进展,但仍然面临一些挑战。
首先,车辆轨迹识别技术需要处理大量的数据,在算法和计算能力方面还有待进一步提升。
智能交通系统中的车辆轨迹识别算法研究

智能交通系统中的车辆轨迹识别算法研究近年来,随着城市化程度的不断提高,交通拥堵问题日益突出,如何利用科技手段来解决这一问题成为了社会各界关注的焦点。
智能交通系统作为一种新兴的解决方案,正逐渐被广泛应用于城市公共交通、物流、出租车等领域,极大地提高了交通运行效率。
车辆轨迹识别算法作为智能交通系统的核心技术之一,其高效的性能和准确的结果,对于智能交通系统的运行至关重要。
一、车辆轨迹识别算法的作用在智能交通系统中,车辆轨迹识别算法可以实现对车辆行动轨迹的准确识别,为城市交通运行提供数据支持。
具体来说,轨迹识别算法可以通过分析车辆在空间坐标系中的运行轨迹,判断车辆的行驶方向、速度、停车时间以及拥堵情况等信息,对城市的拥堵情况进行实时监测。
在公路交通领域中,轨迹识别算法可以为交通管理部门提供实时的道路交通信息,避免交通阻塞、坍塌等问题的发生。
而在物流行业中,实时监控车辆的行驶轨迹和物流配送情况可以大幅提升物流企业的配送效率,降低成本,提高用户满意度。
二、车辆轨迹识别算法的核心技术一般而言,车辆轨迹识别算法主要包含了车辆检测、轨迹跟踪和轨迹分析三个部分。
其中,车辆检测和轨迹跟踪是轨迹识别算法的核心技术。
车辆检测技术可以通过利用车辆的特征信息对目标进行检测,提取车辆的外形轮廓和颜色等特征,实现对车辆的识别。
而轨迹跟踪技术则是通过对车辆运行的轨迹信息进行跟踪和分析,实现对车辆的位置、速度、行驶路线等信息的提取,为后续的数据分析提供支持。
三、轨迹分析算法在车辆轨迹识别算法中,轨迹分析算法是非常重要的一环。
它可以通过对车辆运行轨迹的分析和处理,提取各类交通信息,如拥堵程度、道路状况、行驶速度等等。
其中,拥堵检测算法是轨迹分析算法中的一个重要方面。
该算法可以基于车辆运行轨迹的数据和其他交通数据,判断当前道路的拥堵情况,并提供相应的路线调整方案。
此外,行驶速度计算算法也是一个基于轨迹分析的算法。
此算法可以根据车辆在规定时间内行驶的路程、时间,计算出车辆的实际行驶速度,从而为交通方案的优化提供数据承诺。
基于图像识别的智能小车系统设计
第1章绪论1.1课题背景目前,在企业生产技术不断提高、对自动化技术要求不断加深的环境下,智能车辆以及在智能车辆基础上开发出来的产品已成为自动化物流运输、柔性生产组织等系统的关键设备。
世界上许多国家都在积极进行智能车辆的研究和开发设计。
智能车辆也叫无人车辆,是一个集环境感知、规划决策和多等级辅助驾驶等功能于一体的综合系统。
它具有道路障碍自动识别、自动报警、自动制动、自动保持安全距离、车速和巡航控制等功能。
智能车辆的主要特点是在复杂的道路情况下,能自动地操纵和驾驶车辆绕开障碍物并沿着预定的道路(轨迹)行进。
智能车辆在原有车辆系统的基础上增加了一些智能化技术设备:1)计算机处理系统,主要完成对来自摄像机所获取的图像的预处理、增强、分析、识别等工作。
2)摄像机,用来获得道路图像信息。
3)传感器设备,车速传感器用来获得当前车速,障碍物传感器用来获得前方、侧方、后方障碍物等信息。
智能车辆作为移动机器人的一个重要分支正得到越来越多的关注。
1.2国内外发展现状及趋势智能化作为现代社会的新产物,是以后的发展方向,他可以按照预先设定的模式在一个特定的环境里自动的运作,无需人为管理,便可以完成预期所要达到的或是更高的目标。
同遥控小车不同,遥控小车需要人为控制转向、启停和进退,比较先进的遥控车还能控制其速度,而智能小车,则可以通过计算机编程来实现其对行驶方向、启停以及速度的控制,无需人工干预,是一个集环境感知、规划决策,自动行驶等功能于一体的综合系统,它集中地运用了计算机、传感、信息、通信、导航、人工智能及自动控制等技术,是典型的高新技术综合体。
国外智能车辆的研究历史较长。
它的发展历程大体可以分成三个阶段:第一阶段20世纪50年代是智能车辆研究的初始阶段。
1954年美国Barrett Electronics公司研究开发了世界上第一台自主引导车系统AGVS (Automated Guided Vehicle System)。
车联网中车辆轨迹数据挖掘与分析
车联网中车辆轨迹数据挖掘与分析随着信息技术的迅速发展,车联网(Vehicular Ad-hoc Network, VANET)已经成为现代智能交通系统的重要组成部分。
在这个系统中,数以万计的车辆通过互联网和基础设施设备进行通信,为交通管理、安全和效率提供了强有力的支持。
与此同时,车联网所产生的大量数据也为车辆管理和智能交通分析提供了源源不断的信息。
而车辆轨迹数据就是车联网中最重要的数据类型之一。
它所包含的车辆位置、速度和方向等信息,不仅可以用于交通流预测、拥堵检测和优化路径规划等智能交通应用,还可以为交通事故调查提供重要线索。
因此,轨迹数据的挖掘和分析已成为车联网研究的重要领域之一。
在车辆轨迹数据的应用中,最常见的是基于全局定位系统(Global Positioning System, GPS)技术的位置数据。
通常,这种数据以时间序列的形式记录车辆的运动轨迹,可以包括定位坐标、时间戳和其他车辆信息,例如车速、方向和加速度等等。
这些数据可以通过各种技术进行处理和分析,以提取出有用的信息和模式。
其中,时间序列分析是车辆轨迹数据处理和分析的重要技术之一。
通过时间序列分析,可以对车辆的速度、加速度和停车时长等数据进行统计和建模,进而发现车辆的行驶规律和行为特征。
例如,可以分析某个区域的车辆速度变化情况,找出交通拥堵的原因;也可以观察某个车辆的行驶特点,识别它是否存在违规行为。
此外,时间序列分析还可以预测未来交通流量、分析道路通行能力和制定优化交通运输策略等等。
除了时间序列分析,空间数据挖掘也是车辆轨迹数据处理和分析的重要技术之一。
空间数据挖掘主要是指通过空间统计分析和建模,挖掘出车辆轨迹数据中的空间模式和关联规律。
例如,可以通过聚类分析找出相似的车辆轨迹,并将它们归为一类,以便对交通状况进行研究;也可以利用时空关联模型分析车辆的运动行为,识别出车辆的交通违规行为等等。
此外,机器学习也是车辆轨迹数据处理和分析的重要技术之一。
基于深度学习的交通图像识别技术研究
基于深度学习的交通图像识别技术研究一、介绍近年来,随着深度学习算法的发展,交通图像识别技术在交通管理、智能交通等领域中得到了广泛应用。
交通图像识别技术指的是对交通图像中的车辆、人行道、标志和信号等交通要素进行自动化检测和识别,是实现智能交通的重要技术之一。
本文主要讨论基于深度学习的交通图像识别技术研究。
二、常用算法1. 卷积神经网络(Convolutional Neural Network,CNN)卷积神经网络是深度学习中最基础的模型之一,其主要应用于图像处理中的分类、识别、检测等任务。
在交通图像识别中,卷积神经网络可以对图像中的车辆、人、红绿灯等交通要素进行分类和检测。
同时结合对象跟踪算法可以实现交通流量统计、车辆轨迹跟踪等功能。
2. 循环神经网络(Recurrent Neural Network,RNN)循环神经网络主要应用于序列数据的处理中,可以有效解决交通图像中车辆行驶速度、关键点检测等问题。
另外,循环神经网络还能用于交通场景下的行为识别,包括车辆加速、减速、变道等行为的实时监测。
3. 多尺度网络(Multi-Scale Network,MSN)多尺度网络主要是对图像进行不同尺度的分割和检测,提高对交通要素的识别准确度。
在交通图像识别中,可以通过多层次的尺度对车辆、行人、标志和信号等进行精准的检测和分类。
三、交通图像识别常用数据集1. Caltech101Caltech101是一个用于图像识别的经典数据集,包含101个不同类别的物体图片。
其中包含几个关于汽车、自行车的交通场景的数据。
2. CityscapesCityscapes是一个城市道路场景数据集,包括交通标志、道路标线、红绿灯、行人等,主要用于交通场景下的像素级别分割。
3. KITTIKITTI是一个开源的数据集,主要用于研究自动驾驶相关的技术,其中包含很多交通场景下的车辆、行人和路标等数据。
四、应用场景交通图像识别技术在智能交通、城市安全、智能安防等领域中得到了广泛应用。
基于图像处理的车辆牌照识别与车牌追踪系统

基于图像处理的车辆牌照识别与车牌追踪系统车辆牌照识别和车牌追踪系统是一种基于图像处理的技术,用于自动识别和追踪车辆牌照。
它的应用范围广泛,涵盖了交通管理、安防监控、智能停车、智能交通等领域。
本文将对基于图像处理的车辆牌照识别与车牌追踪系统进行详细介绍。
一、背景介绍随着车辆数量的快速增长,传统的人工识别车牌的方式已经无法满足实际需求。
因此,车辆牌照识别和车牌追踪系统应运而生。
该系统利用计算机视觉和图像处理技术,将车牌中的字母和数字识别出来,并将识别结果用于后续的车牌追踪任务。
二、车辆牌照识别系统车辆牌照识别系统主要包括图像采集、车牌定位、车牌识别和字符识别等步骤。
首先,需要进行图像采集。
通过摄像头或者视频设备,获取车辆的图像数据。
图像采集过程中需要注意图像质量,以保证后续的车牌识别准确性。
接下来,进行车牌定位。
车牌定位是指从采集的图像中确定车牌的位置。
通常,车牌具有固定的形状和大小,可以通过图像处理算法来提取出车牌的特征并确定其位置。
然后,进行车牌识别。
车牌识别是指从定位的车牌图像中识别出车牌中的字母和数字。
车牌识别算法主要利用图像分割、特征提取和模式识别等技术,对车牌图像进行处理并识别出其中的字符信息。
最后,进行字符识别。
字符识别是指将车牌中的字母和数字转化为文本信息。
通常,字符识别算法采用模式匹配和机器学习等技术,通过训练模型来实现。
三、车牌追踪系统车牌追踪系统主要是基于车辆牌照识别系统的结果,对车辆进行跟踪追踪。
首先,需要建立一个车牌数据库。
将车辆牌照识别系统识别出的车牌信息存储在数据库中,包括车牌号码、车辆类型、颜色等信息。
接下来,进行车辆跟踪。
车辆跟踪是指在连续的图像帧中,根据识别出的车牌信息来追踪车辆的运动轨迹。
车辆跟踪算法通常采用目标检测和运动分析等技术,通过比对连续帧之间的差异来确定车辆的位置和运动信息。
最后,进行车辆识别和属性提取。
根据车牌数据库中存储的信息,对追踪到的车辆进行识别和属性提取,包括车辆品牌、型号、所有人等信息。
智能交通系统中基于视频的行车轨迹检测与跟踪

智能交通系统中基于视频的行车轨迹检测与跟踪智能交通系统是目前城市交通管理中的一项重要领域,其发展为交通管理提供了更多的可能性和创新思路。
在智能交通系统中,基于视频的行车轨迹检测与跟踪是一项关键技术,能够实时监测和分析道路上的车辆行为,为交通管理和安全提供有力支持。
行车轨迹检测是指通过视频图像处理和计算机视觉技术,检测和提取车辆在道路上的轨迹信息。
首先,系统会拍摄道路的视频,并将其传输到图像处理算法中进行处理。
然后,通过图像处理技术,系统能够自动检测和识别车辆在图像中的位置和行进方向,构建车辆行驶的轨迹。
最后,系统会将提取的轨迹信息传输给交通管理中心,以供进一步分析和决策。
在行车轨迹检测中,图像处理算法起着关键作用。
传统的图像处理算法通常基于特征提取和匹配的方法,但由于车辆在行驶过程中存在多种变化因素,例如光照变化、道路状况等,这些方法往往难以满足实际应用的需求。
因此,近年来,深度学习技术的发展为行车轨迹检测带来了新的可能性。
深度学习技术通过构建深度神经网络模型,能够自动从原始数据中学习和提取特征,进一步实现对车辆行驶轨迹的准确检测。
通过使用卷积神经网络和循环神经网络等模型,可以较好地处理光照变化、遮挡以及道路状况复杂的情况。
此外,通过引入目标检测技术,系统能够准确地辨别图像中的车辆,并进行轨迹的跟踪。
在行车轨迹跟踪中,跟踪算法需要处理车辆在行驶过程中的位置变化、速度变化以及与其他车辆的相互关系。
传统的跟踪算法通常基于运动模型和特征匹配的方法,但由于车辆行驶过程中的复杂情况,这些方法的鲁棒性和准确性存在一定局限性。
因此,近年来出现了多种基于深度学习的跟踪算法。
基于深度学习的跟踪算法通过将视频序列作为输入,结合卷积神经网络和循环神经网络,能够实现对车辆轨迹的实时跟踪。
通过学习和提取视频序列中的特征,系统能够实时预测车辆的位置变化和速度变化,并对车辆进行准确的跟踪。
此外,通过引入目标关联技术,系统能够自动对多个车辆进行跟踪,并实现对车辆间的相互关系的建模。
基于计算机视觉的车辆行驶状态检测
基于计算机视觉的车辆行驶状态检测随着科技的发展和社会的进步,计算机视觉技术在各个领域都得到了广泛应用,其中一项关键技术就是基于计算机视觉的车辆行驶状态检测。
这项技术通过使用摄像头和图像处理算法,实时监测车辆的行驶状态,为安全驾驶提供了有力的支持。
首先,通过计算机视觉技术可以实现车道偏离预警。
当车辆在行驶过程中偏离车道时,计算机视觉系统可以实时检测并发出警告信号,提醒驾驶员及时纠正行驶方向。
这项技术基于图像处理算法,通过分析车辆前方的道路线条,提取出车辆当前所在的车道,并与规定的车道进行比对。
一旦发现车辆偏离了规定的车道,系统就会发送警报,有效避免了因驾驶员疲劳或者注意力不集中而导致的事故。
其次,基于计算机视觉的车辆行驶状态检测还可以实现前方车辆及障碍物的智能识别。
通过对车辆前方的图像进行处理和分析,计算机视觉系统可以准确地辨认出前方是否有其他车辆或障碍物,进而为驾驶员提供及时的警示。
这项技术不仅可以帮助驾驶员预测前方的交通情况,还能自动根据障碍物的距离和速度调整车辆的行驶速度,提高驾驶安全性。
此外,基于计算机视觉的车辆行驶状态检测还可以实现对驾驶员状态的监测。
通过分析驾驶员的面部表情、眼睛的状态以及姿态信息,计算机视觉系统可以判断出驾驶员的疲劳、分神以及其他不良驾驶行为。
一旦发现驾驶员处于疲劳或者分心状态,系统会及时发出警示,提醒驾驶员休息或者集中注意力,避免因驾驶员状态不佳而导致的事故发生。
然而,基于计算机视觉的车辆行驶状态检测技术仍面临一些挑战。
首先,技术的可靠性和准确性需要不断提高。
由于车辆行驶状态的检测对驾驶员的安全至关重要,因此技术的准确性必须得到保证。
其次,技术的实时性也是一个问题。
由于车辆行驶状态的检测需要在驾驶过程中持续进行,因此系统必须能够在短时间内完成图像的处理和分析。
此外,技术还需要在各种复杂的环境条件下进行验证和适应。
综上所述,基于计算机视觉的车辆行驶状态检测技术在提高驾驶安全性方面具有广阔的应用前景。
图像识别技术在自动驾驶系统中的实际应用案例

图像识别技术在自动驾驶系统中的实际应用案例随着科技的不断进步和发展,自动驾驶技术成为了汽车行业的热门话题。
自动驾驶系统的核心是通过传感器获取车辆周围环境的信息,并对其进行分析和识别,以实现自主驾驶。
在这一过程中,图像识别技术起到了至关重要的作用。
本文将介绍几个图像识别技术在自动驾驶系统中的实际应用案例。
首先,图像识别技术在自动驾驶系统的道路标志识别中发挥了重要作用。
道路标志是驾驶员遵循交通规则和保证交通安全的重要依据,而自动驾驶系统需要能够准确识别不同种类的道路标志,并根据其含义做出相应的反应。
利用图像识别技术,自动驾驶系统可以实时识别并解读道路标志,例如识别限速标志、禁止通行标志、停车标志等。
识别出的道路标志信息可以帮助自动驾驶系统做出相应的行驶决策,确保车辆按照交通规则行驶,并保障行车安全。
其次,图像识别技术在自动驾驶系统的行人检测中也发挥了重要作用。
行人检测是自动驾驶系统中的一个关键环节,它需要能够准确地识别出周围行人的位置和动作,以便进行自适应的行驶。
通过利用图像识别技术,自动驾驶系统可以实时检测道路上的行人,并根据行人的位置和动作做出相应的反应。
例如,当自动驾驶系统检测到行人准备过马路时,它可以相应地减速或停车,以确保行人的安全。
此外,图像识别技术在自动驾驶系统的障碍物检测中也得到了广泛应用。
障碍物检测是自动驾驶系统中的一个重要任务,它需要能够准确地识别出道路上的障碍物,并做出相应的行驶决策。
利用图像识别技术,自动驾驶系统可以实时检测道路上的障碍物,如其他车辆、路障、工程设施等,并根据障碍物的位置和尺寸做出相应的避让动作。
这使得自动驾驶系统可以更好地适应复杂的道路环境,并提高行车的安全性和稳定性。
最后,图像识别技术还被应用于自动驾驶系统的车道保持功能中。
车道保持是自动驾驶系统中的重要功能之一,它需要能够准确地识别道路的车道线,并保持车辆在车道内稳定行驶。
利用图像识别技术,自动驾驶系统可以实时识别道路的车道线,并根据车道线的位置和形状做出相应的调整。
基于数字图像技术的汽车行驶轨迹状态识别
即
=
α 0 co s 0 0 α 0 - sin 0 1
1
像平面坐标 ( u , v) 的值为
u = C1 / C4 v = C2 / C4 ( 10 ) 得到 则由式 ( 9) 、 ( a11 - a41 u) X + ( a12 - a42 u) Y + ( 4) ( 10)
林广宇 ,魏 朗
摘 要 : 为获取驾驶员行驶状态信息与监控行车状况 ,通过车载 CCD 图像传感器获得序列图像 ,应 用数字图像理解和计算机视觉技术 ,建立摄像机的透视投影模型和汽车行驶轨迹状态模型 ,根据平 面图像上的点推导出车辆在空间道路上的实际位置 ,对车辆行驶过程中相对道路标线的行驶轨迹 进行研究 。该方法获得的行驶轨迹曲线能够正确判断驾驶员压线行驶 、 越线行驶与逆向行驶等违 章行为 ,是判别驾驶员行驶状态的有效方法 。 关键词 : 交通安全 ; 行驶状态 ; 图像理解 ; 违章驾驶 中图分类号 : U491 文献标识码 :A
0 引 言
随着中国公路交通基础设施的逐渐完善和汽车 保有量的增加 ,道路交通事故造成的生命和财产损失 愈发让人不能小觑 。据公安部道路交通管理局统计 , 2004 年全国共发生道路交通事故 517 889 起 , 造成 107 077 人 死 亡 , 与 2003 年 相 比 , 死 亡 人 数 上 升
γ = R
则
C1 C2 C3 C4
C = AW a11 a12 a22 a32 a42 a13 a23 a33 a43 a14 a24 a34 a44 X Y Z ( 9) a21 a31 a41
γ co s γ 0 - sin 0
0 1 0
0 0 1
( 3)
R α =
智能交通系统中的车辆轨迹识别技术详解(四)

智能交通系统中的车辆轨迹识别技术详解引言:智能交通系统是指利用先进的物联网、大数据、人工智能等技术手段来管理、优化和提升城市交通运输系统的效率和便利性。
而车辆轨迹识别技术作为智能交通系统的核心技术之一,具有重要的意义。
本文将从车辆轨迹识别技术的定义、发展历程、应用场景和挑战等方面进行详细的介绍和解析。
一、车辆轨迹识别技术的定义车辆轨迹识别技术是指通过采集和分析车辆在道路上行驶的轨迹信息,以实现对车辆行驶状态、行为和路线的准确识别和分析的技术手段。
该技术可以通过车载传感器、摄像头、雷达和GPS等设备获取车辆的位置、速度、加速度等信息,并通过计算机视觉和数据分析等算法对这些信息进行处理和解读,进而实现对车辆的轨迹分析和行驶行为的判断。
二、车辆轨迹识别技术的发展历程车辆轨迹识别技术的发展经历了多个阶段。
最早的阶段是基于传统传感器的车辆轨迹识别技术,主要使用磁力感应器、电感线圈等设备进行车辆的轨迹检测和记录。
然而,这种技术受限于设备成本高、覆盖范围有限等问题,逐渐被新型技术所替代。
随着计算机和图像处理技术的快速发展,基于视觉信息的车辆轨迹识别技术逐渐崭露头角。
通过使用摄像头等设备采集道路上的车辆图像,并通过计算机视觉算法进行图像处理和特征提取,可以实现对车辆轨迹的准确识别和分析。
这种技术在城市交通管理和安全监控等领域广泛应用。
而随着移动互联技术的飞速发展,基于无线通信的车辆轨迹识别技术也开始崭露头角。
通过车载GPS和移动通信网络等技术手段,可以实现对车辆位置和轨迹的实时监测和追踪,提供更加准确和全面的数据支持。
这种技术在交通导航、交通流量分析等方面具有广阔的应用前景。
三、车辆轨迹识别技术的应用场景车辆轨迹识别技术在智能交通系统中有着广泛的应用场景。
首先,它可以用于交通监控和车辆管理。
通过对车辆轨迹的实时监测和分析,交通管理部门可以及时处理交通事故、交通拥堵等问题,提高交通运输的安全性和效率。
其次,车辆轨迹识别技术也可以应用于智能导航系统。
图像识别技术在自动驾驶系统中的应用
图像识别技术在自动驾驶系统中的应用自动驾驶技术是近年来备受关注的领域,图像识别技术在其中扮演着重要的角色。
通过利用图像识别技术,自动驾驶系统能够感知周围环境,识别道路标志、车辆、行人等,从而实现智能驾驶。
本文将详细介绍图像识别技术在自动驾驶系统中的应用。
一、道路标志识别道路标志是指示驾驶员行驶方向、限速、警示等的重要指示牌。
自动驾驶系统通过图像识别技术,能够准确识别道路标志,从而遵守交通规则,做出相应的驾驶决策。
例如,当自动驾驶车辆接近一个限速标志时,系统能够通过图像识别技术识别出该标志并了解限速要求,进而调整车速。
这不仅能提高行车安全性,还能提升驾驶体验。
二、交通信号灯检测交通信号灯是指示车辆和行人交通状态的重要设备。
通过图像识别技术,自动驾驶系统能够准确检测交通信号灯的状态,判断是停车、行驶还是等待,从而做出相应的驾驶决策。
例如,当红灯亮起时,自动驾驶系统能够通过图像识别技术识别出红灯,自动停车等待绿灯,避免违反交通规则,提高交通效率。
三、行人检测与识别行人是道路上重要的交通参与者,自动驾驶系统需要准确地检测和识别行人,以确保行车安全。
通过图像识别技术,自动驾驶系统能够迅速识别行人,并根据行人的位置和行为做出相应的驾驶决策。
例如,当行人突然穿越马路时,系统能够通过图像识别技术及时发现并避免与行人发生碰撞。
四、车辆检测与跟踪除了行人,自动驾驶系统还需要准确地检测和跟踪其他车辆的位置和行为。
通过图像识别技术,自动驾驶系统能够识别并追踪其他车辆的位置和速度,预测其可能的行驶轨迹,并根据这些信息做出相应的驾驶决策。
例如,在变道或超车时,系统能够通过图像识别技术检测到周围车辆,并在确保安全的情况下进行相应的操控。
五、障碍物检测与避免在驾驶过程中,自动驾驶系统需要及时识别并避免道路上的障碍物,例如路障、工地设施等。
通过图像识别技术,自动驾驶系统能够准确识别道路上的障碍物,并做出避让等相应的驾驶决策。
这能够提高行车的安全性,减少交通事故发生的可能性。
智能交通系统中的车辆轨迹识别技术详解(七)
智能交通系统中的车辆轨迹识别技术详解智能交通系统的出现为我们的交通管理带来了巨大的便利和改变。
其中,车辆轨迹识别技术是智能交通系统中的关键技术之一。
本文将从多个角度详细探讨车辆轨迹识别技术的原理、应用和发展前景。
一、车辆轨迹识别技术的原理车辆轨迹识别技术是通过对车辆行驶过程中产生的数据进行采集、处理和分析,从而得出车辆行驶轨迹的一种技术手段。
其主要原理是基于车辆行驶轨迹在时间和空间上的连续性。
在实际应用中,车辆轨迹数据可以通过多种方式进行采集,比如通过车载设备、监控摄像头和交通传感器等。
这些数据包括了车辆的位置、速度、加速度等信息。
通过对这些数据进行处理和分析,可以还原出车辆的行驶轨迹。
二、车辆轨迹识别技术的应用车辆轨迹识别技术在智能交通系统中有着广泛的应用。
首先,它可以用于交通监测和管理。
通过对车辆轨迹的识别和分析,可以实时监测交通流量、拥堵情况和交通事故等,从而及时调整交通信号灯的配时和路线规划,提高道路的通行效率。
此外,车辆轨迹识别技术还可以用于交通预测和规划。
通过对历史车辆轨迹数据的分析,可以预测未来的交通流量和需求,帮助决策者做出合理的交通规划决策,减少拥堵和交通事故发生的概率。
另外,车辆轨迹识别技术在智慧城市建设中也发挥着重要作用。
通过对车辆轨迹的识别和分析,可以对城市的交通网络进行优化和改进,提供更加便捷和高效的出行方式。
三、车辆轨迹识别技术的发展前景随着智能交通系统的不断发展和完善,车辆轨迹识别技术也在不断创新和进步。
首先,随着车载设备和监控摄像头等技术的不断进步,车辆轨迹数据的采集和处理能力将得到进一步提升,为精准的车辆轨迹识别提供更好的数据支持。
其次,人工智能技术的快速发展也为车辆轨迹识别技术的进一步改进和应用提供了新的可能性。
通过深度学习等技术,可以对大规模的车辆轨迹数据进行智能化的处理和分析,提高车辆轨迹识别的准确性和效率。
此外,车辆轨迹识别技术的发展还将与其他智能交通技术相结合,实现更加全面和智能的交通管理。
数字图像处理技术在智能交通中的应用
数字图像处理技术在智能交通中的应用
数字图像处理技术是信息处理技术中的一种,它是应用数学和计算机的原理来处理图像,经过一定的算法处理,能彻底分析图像中所包含的数据信息。
在智能交通中,数字图像处理技术可以帮助交通管理者对道路,车辆,人群和环境等进行识别,定位和检测,并利用这些信息来实现自动控制和管理。
数字图像处理技术可以应用于停车管理。
可以通过数字图像处理技术将摄像头安装在车辆的前档板和发动机厢,从而实时获得车辆的车牌号和位置信息,对尾号限行的车辆,远程控制停车位,可以根据车辆位置决定收费情况,甚至可以实现定位行车轨迹,进行重点车辆追踪。
数字图像处理技术还可以应用于交通事故报警检测。
可以利用图像处理技术,设置交通摄像头,远程识别和处理前后对比图像,根据变化判断事故是否发生,并且可以在未发生事故时将资料发送给管理中心,以及警方,确保交通安全。
总之,数字图像处理技术在智能交通中的应用不仅能有效提高交通效率,还可以保证道路上的安全,有助于加强道路交通安全管理,提升交通改造的效率,更加有效的保障市民的安全。
基于智能算法的车辆轨迹跟踪技术研究
基于智能算法的车辆轨迹跟踪技术研究车辆轨迹跟踪技术是现代交通系统中不可或缺的一部分,它可以帮助交通管理部门对于车辆的行驶情况进行精确的监控,从而提高道路交通效率与安全性。
传统的车辆轨迹跟踪技术基本上是依靠GPS等定位系统,但是这种技术并不准确且易受到环境因素干扰。
随着人工智能技术的不断发展,在车辆轨迹跟踪领域也涌现出了一系列基于智能算法的最先进技术。
一、智能算法中的神经网络在车辆轨迹跟踪技术中,一种常见的智能算法是神经网络。
神经网络可以通过对大量数据的学习,逐渐建立一个准确的预测模型,从而在车辆轨迹跟踪方面做出公认的最佳表现。
神经网络通常包含输入层、隐藏层以及输出层三个部分,其中输入层可以将车辆状况、路况等数据进行预处理,隐藏层可以通过对数据进行较为复杂的学习操作,最后输出层将处理后的结果进行输出,完成对车辆轨迹的准确跟踪。
与传统的车辆定位技术相比,神经网络具有更高的准确度与鲁棒性,同时又可以在受到噪声等干扰时保持较高的稳定性。
二、深度学习算法的应用在现代智能算法中,一种越来越普遍的技术是深度学习算法。
深度学习算法基于人工神经网络,并通过对一定数量的数据进行训练,从而实现对数据的自动化处理。
在车辆轨迹跟踪技术中,深度学习算法的应用意义重大。
当车辆需要通过路况复杂的地区时,普通的传感器很可能会受到环境干扰而不能准确进行测量。
而深度学习可以通过对数据的智能处理,建立准确的神经网络模型,从而提高车辆轨迹跟踪的准确率与可靠性。
三、基于卷积神经网络的技术卷积神经网络是深度学习算法的一种重要应用,它可以通过对输入数据进行卷积、降维等操作从而进行训练。
在车辆轨迹跟踪技术中,卷积神经网络被广泛应用,可以快速地、准确地对路况数据进行处理。
对于车辆运动过程的轨迹,卷积神经网络可以通过对路面摄像头、传感器等设备获取的数据进行分析,识别出路况状况,从而进行轨迹跟踪。
这种技术在野外环境中尤为有效,可以提高车辆轨迹跟踪的准确率与实时性。
智能交通中的车辆行驶轨迹分析与预测
智能交通中的车辆行驶轨迹分析与预测智能交通是一种充满潜力的技术,它利用先进的网络和计算技术来提高道路网的安全性和效率。
一个智能交通系统中最重要的一部分是车辆行驶轨迹分析与预测。
通过对车辆的行驶轨迹进行分析和预测,可以帮助交通管理部门和车辆驾驶员更好地了解道路状况,及时采取措施,提高交通安全和效率。
一、车辆行驶轨迹车辆的行驶轨迹是指车辆从起点到终点的路径。
它是通过车辆在道路上所花费的时间、速度、方向等因素所绘制出来的。
对于智能交通系统来说,了解车辆的行驶轨迹是非常重要的。
因为一个车辆的行驶轨迹可以提供大量的信息,包括交通瓶颈、道路拥堵点、交通高峰时段等等。
这些信息对于交通管理部门来说非常有用,可以帮助他们更好地规划路线和改善交通。
二、车辆行驶轨迹分析车辆行驶轨迹分析是指对车辆的行驶轨迹数据进行处理和分析。
这种分析可以帮助交通管理部门更好地了解道路状况,提高道路安全性和效率。
具体而言,车辆行驶轨迹分析可以做以下几方面的工作:1、识别交通拥堵点交通拥堵一直是交通管理部门所关注的问题。
通过分析车辆的行驶轨迹数据,可以对交通拥堵点进行精确识别。
然后,交通管理部门可以采取措施来改善道路状况,提高车辆的行驶效率。
2、评估交通流量和道路容量交通流量和道路容量是交通管理部门所关注的另一个问题。
通过分析车辆的行驶轨迹数据,可以计算出车辆在道路上的速度和数量,从而精确评估交通流量和道路容量。
这些数据可以更好地指导交通管理部门规划路线和管控道路。
3、分析车辆行驶时长车辆行驶时长是区分道路运输效率的一个重要因素。
通过分析车辆的行驶轨迹数据,可以计算出车辆在道路上所花费的时间。
交通管理部门可以利用这些数据来评估道路运输效率,并采取措施改善交通状况。
三、车辆行驶轨迹预测车辆行驶轨迹预测是指预测车辆将来的行驶轨迹。
这种预测可以帮助交通管理部门更好地规划路线,节约时间和资源。
但是,车辆行驶轨迹预测是一个非常复杂的问题,需要考虑到车辆本身的特点、道路情况以及交通规律等多个因素。
智能交通系统中的车辆轨迹识别技术详解(一)

智能交通系统中的车辆轨迹识别技术近年来,智能交通系统在城市交通管理中的作用越来越受到重视。
而车辆轨迹识别技术作为智能交通系统的核心技术之一,为实现车辆流量监测、交通事故分析等提供了重要支持。
本文将围绕智能交通系统中的车辆轨迹识别技术展开详细论述。
首先,在智能交通系统中,车辆轨迹识别技术主要通过视频监控来实现。
通过摄像头对交通路口、高速公路等区域进行拍摄,获取到车辆的图像信息,然后通过图像处理和计算机视觉算法来识别车辆的轨迹。
这一过程中,图像处理起到了至关重要的作用,它能够对图像进行预处理,提取出车辆的特征信息,进而实现车辆的跟踪和轨迹重建。
其次,为了提高车辆轨迹识别的准确性和实时性,研究人员采用了各种先进的计算机视觉算法。
其中,基于背景建模的算法是最常用和基础的方法之一。
该算法通过对连续帧图像进行比较和分析,提取出背景和前景信息,从而实现对车辆轨迹的识别。
此外,还有基于特征点匹配的算法,通过检测车辆图像中的特征点,并将其与其他帧中的特征点进行匹配,从而实现车辆的轨迹跟踪。
然而,车辆轨迹识别技术在实际应用中还面临一些挑战和难题。
首先,复杂的交通环境和车辆运动模式使得识别算法的设计变得复杂而困难。
在城市道路中,车辆之间常常会出现交叉、变道、超车等情况,这给轨迹识别带来了很多干扰。
其次,大规模的图像数据需要高效的处理和存储能力,这对计算机硬件的要求较高。
此外,车辆轨迹识别技术还需要考虑隐私和安全等问题,以保护个人信息和交通数据的安全性。
为了克服上述问题,研究人员正在积极探索和改进车辆轨迹识别技术。
一方面,他们不断优化算法和模型,提高轨迹识别的准确性和稳定性。
例如,引入深度学习算法,利用深度神经网络对车辆图像进行自动特征提取和分类,能够提高轨迹识别的效果。
另一方面,他们还研究车辆轨迹识别与其他智能交通系统的融合应用,如与交通信号控制系统、智能导航系统等相结合,实现更综合、高效的交通管理。
总结起来,智能交通系统中的车辆轨迹识别技术是一项复杂而又具有广阔应用前景的技术。
自动驾驶车辆中的行为识别与轨迹预测
自动驾驶车辆中的行为识别与轨迹预测近年来,自动驾驶技术在汽车行业中得到了广泛的关注与应用。
作为一项颠覆性的技术,自动驾驶车辆正改变着我们的出行方式,并对道路安全和交通系统提出了新的挑战。
在实现真正智能化的自动驾驶系统之前,行为识别与轨迹预测成为关键技术之一。
行为识别是指在自动驾驶车辆中,通过分析周围环境和其他交通参与者的行为,来判断其意图和行动。
行为识别模型通常借助传感器和深度学习等技术,对行人、车辆等目标进行感知与分类,从而预测其下一步的动作,以实现对交通流动态的准确把握。
准确的行为识别对于决策和规划模块来说至关重要,以便车辆能够相应地做出合适的行动。
在自动驾驶车辆中,轨迹预测是指预测其他交通参与者未来一段时间内的运动轨迹。
准确的轨迹预测可以帮助车辆在复杂交通情境中做出适当反应,从而提高行驶的安全性和效率性。
轨迹预测的方法可以基于规则、统计模型和机器学习等技术。
随着机器学习和深度学习技术的发展,基于数据驱动的方法成为当前轨迹预测研究中的主流。
行为识别和轨迹预测的关键挑战之一是不确定性问题。
交通参与者的行为是多样化且动态变化的,因此预测其具体动作和轨迹存在着一定的不确定性。
如何准确地建模和预测这种不确定性,成为当前研究的热点之一。
研究人员通过融合多源数据和采用概率推断等方法,不断提高行为识别和轨迹预测的准确性与鲁棒性。
另一个挑战是在复杂交通环境中的预测。
自动驾驶车辆需要在各种复杂的道路情况下行驶,如高速公路、市区道路、人行横道等。
然而,不同的交通环境对于行为识别和轨迹预测提出了各种不同的要求。
例如,在高速公路上,车辆的行为相对单一,轨迹预测相对容易。
而在市区道路上,行人和其他交通参与者的行为更加多样化和复杂,需要更加精准的识别和预测方法。
此外,行为识别和轨迹预测的实时性也是一个挑战。
自动驾驶车辆需要及时准确地提供周围交通参与者的行为和轨迹信息,以便决策和规划模块正确地做出反应。
因此,行为识别和轨迹预测算法需要高效地处理海量的传感器数据,并在短时间内做出准确的预测结果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
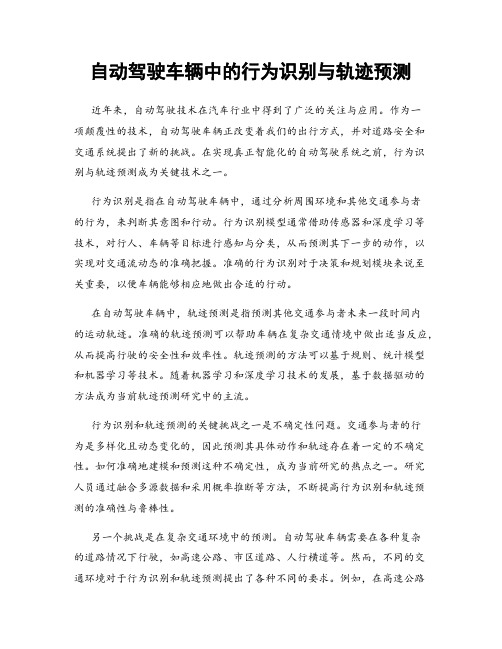
图2 摄像机的安装位置
Fig. 2 Cameraπs fixing po sition
图3 摄像机的俯视图
Fig. 3 Cameraπs planform
图4 坐标系统的关系
Fig. 4 Relationship bet ween t wo coordinate systems
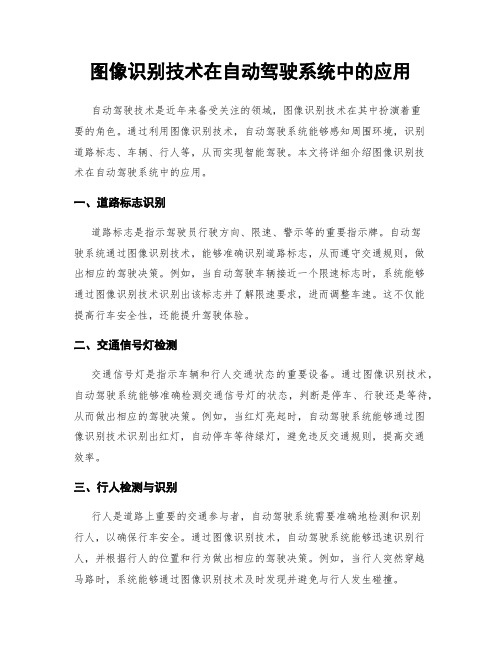
图1 图像处理结果《中华Leabharlann 民共和国道路交通管理条例》 规定机动
平移变换矩阵 T 为
116 1
T =
交 通 运 输 工 程 学 报
0 1 0 0 0 0 1 0 0 0
- h ( 2)
2006 年
0 0 0
部分 :外部参数校准和内部参数校准。外部参数包括 摄像机距地面高度 h 、 与车侧距离 d 、 自转角γ和俯仰 角α ; 内部参数包括焦距 、 镜头失真系数 、 图像平面原 点的计算机图像坐标等。摄像机内部参数只需校正 一次 , 当位置发生变化时只校正外部参数即可。 在实验中预先标定某些空间点 , 测量它们的世 界坐标及在像平面的坐标 , 借助这些点确切的位置 信息对摄像机进行校准 。根据式 ( 5) , 设
林广宇 ,魏 朗
( 长安大学 汽车学院 ,陕西 西安 710064)
摘 要 : 为获取驾驶员行驶状态信息与监控行车状况 ,通过车载 CCD 图像传感器获得序列图像 ,应 用数字图像理解和计算机视觉技术 ,建立摄像机的透视投影模型和汽车行驶轨迹状态模型 ,根据平 面图像上的点推导出车辆在空间道路上的实际位置 ,对车辆行驶过程中相对道路标线的行驶轨迹 进行研究 。该方法获得的行驶轨迹曲线能够正确判断驾驶员压线行驶 、 越线行驶与逆向行驶等违 章行为 ,是判别驾驶员行驶状态的有效方法 。 关键词 : 交通安全 ; 行驶状态 ; 图像理解 ; 违章驾驶 中图分类号 : U491 文献标识码 :A
收稿日期 :2005211209 基金项目 : 高等学校博士学科点专项科研基金项目 (20050710002) 作者简介 : 林广宇 (19722) ,女 ,吉林辽源人 ,长安大学讲师 ,工学博士研究生 ,从事汽车电子技术与道路交通安全研究 。 导师简介 : 魏 朗 (19572) ,男 ,四川成都人 ,长安大学教授 ,工学博士 。
115
车必须在机动车道内行驶 , 若车辆经常压着道路标 志线行驶或不时穿越道路标志线 , 一方面存在大量 的安全隐患 ,另一方面表征驾驶员处于非正常工作 状态 ( 如疲劳驾驶 、 酒后驾驶等 ) 。对于正在公路行 驶的大部分车辆 ,交管部门无法做到随时跟踪其状 态 ,纠正其违章行为 [ 8 ] 。利用车载系统的 CCD 图像 传感器拍摄的平面图像 ,建立模型 ,得到三维空间中 车辆相对于道路标志线的位置 , 可以识别车辆行驶 轨迹状态 。 从平面图像获得 32D 空间运动物体的位置 , 关 键在于平面坐标与三维坐标的变换 。CCD 摄像机 固定在车辆前端顶部 ,安装位置见图 2 、 3 ,摄像头距 地面高度为 h 。设定 2 个三维坐标系 : 世界坐标系 X Y Z 与摄像机坐标系 x y z 。动态的世界坐标系随 车辆一起运动 , 以摄像机镜头中心在地面的垂直投 影点为原点 O , 地面的垂直线为 Z 轴 , 道路标线方向 为 X 轴 , 见图 4 ; 摄像机坐标系以光轴为 z 轴 , 镜头 中心为坐标原点 o , 摄像机坐标 x oy 平面与像平面 平行 , 表征图像内部各点位置与像平面坐标系的 u 、 v 轴与 x 、 y 轴平行 。设空间点 W 在世界坐标系下 的齐次坐标为
Driving route status recognition based on digital image technique
Lin Guang2yu , Wei Lang
( School of Auto mobile , Changπ an U niversity , Xiπ an 710064 , Shaanxi , China)
1 道路标线辨识概述
由车载 CCD 摄像机获取的原始图像由于如镜 头脏污 、 地面凹凸不平及车辆振动等原因和干扰造 成图像模糊 ,不能直接使用 ,必须对原始图像进行预 处理 。本文只对图像的一部分区域感兴趣 [ 5 ] , 在处 理过程中将道路标线增强 ,而将其他特征适当衰减 。 图像预处理包括滤波处理和图像边缘增强[ 6 ] 。 对图像滤波处理目的是去除图像噪声 ,在空间域中采 用一种局部平均的平滑技术中值滤波处理方法 ,以较 小的计算机内存和时间开销为代价 ,对脉冲干扰和椒 盐噪声取得良好的抑制效果 ,并可以有效地保护图像 边缘。边缘增强的目的在于突出道路标线的边缘信 息[ 7 ] ,便于道路标线辨识 ,本文采用 Sobel 算子进行边 缘检测。图 1 左图为某一违章图像 ,右图是其边缘检 测后的图像 。以下讨论提及的道路标线均指车辆左 侧与车辆横向距离最近的道路中间的标线。
即
=
α 0 co s 0 0 α 0 - sin 0 1
1
像平面坐标 ( u , v) 的值为
u = C1 / C4 v = C2 / C4 ( 10 ) 得到 则由式 ( 9) 、 ( a11 - a41 u) X + ( a12 - a42 u) Y + ( 4) ( 10)
则世界坐标系的点 W 到摄像机坐标系的变换 M 为
αRγTW M = R
设摄像机焦距为 f , 经透视投影变换 , 可得平面 图像的点 C 与实际空间对应点 W 的关系为
C = PRαRγTW ( 5)
( a13 - a43 u) Z + ( a14 - a44 u) = 0
( a21 - a41 v) X + ( a22 - a42 v) Y +
A = PRαRγT
1
实际安装中 , 世界坐标系与摄像机坐标系的各 对应轴并不互相平行 , 为确定摄像机的空间方向 , 用 俯仰角α表示摄像机光轴 ( z 轴) 相对于水平方向的 夹角 , 用自转角 γ表示摄像机 x 坐标轴相对于路面 标线 ( X 轴) 的夹角 , 得旋转变换矩阵为 γ sin γ 0 0 co s
Fig. 1 Image processing result
T W = ( X , Y , Z , 1)
2 行驶轨迹状态识别
21 1 模型建立
若世界坐标系统的 X 、 Y、 Z 轴与摄像机坐标系 统的 x 、 y、 z 轴分别相互平行 , 则世界坐标系内点 W 的摄像机坐标 M 为
M = TW ( 1)
0 引 言
随着中国公路交通基础设施的逐渐完善和汽车 保有量的增加 ,道路交通事故造成的生命和财产损失 愈发让人不能小觑 。据公安部道路交通管理局统计 , 2004 年全国共发生道路交通事故 517 889 起 , 造成 107 077 人 死 亡 , 与 2003 年 相 比 , 死 亡 人 数 上 升
γ = R
则
C1 C2 C3 C4
C = AW a11 a12 a22 a32 a42 a13 a23 a33 a43 a14 a24 a34 a44 X Y Z ( 9) a21 a31 a41
γ co s γ 0 - sin 0
0 1 0
0 0 1
( 3)
R α =
0 0 α 0 - sin 0 1 α 0 - co s 0 0
第 3 期 林广宇 ,等 : 基于数字图像技术的汽车行驶轨迹状态识别 故是交通管理工作的重中之重 ,因此 ,一方面需要加 强驾驶员对交通法规的学习 ,提高自身的素质 ; 另一 方面 ,必须在技术上采取相应的措施加以限制、 预防 [1 ] 和警告驾驶员危险的发生 。在车辆上安装基于图 像的行驶状况监控系统[ 2 ] 是十分有效的手段之一 ,利 用安装在车辆上的图像传感器 CCD 摄像机 ,采集汽 车行驶过程中实际的道路状况和周围的交通环境信 息[ 3 ] ,采用嵌入式 DSP 芯片加以处理 、 识别 、 压缩和 [4 ] 存储 ,根据一定的算法模型和规则计算行驶轨迹 , 判断驾驶员的行驶状态 ,保留违章图像 ,并在有潜在 危险时向驾驶员示警。本文对图像进行预处理后获 取道路标线 ,建立模型 ,以道路标线在图像中的位置 为依据 ,对汽车行驶过程中行驶轨迹特性进行研究 。
( 11)
投影变换矩阵为
1
P=
0 1 0 0
第6卷 第3期 2006 年 9 月
交 通 运 输 工 程 学 报 Journal of Traffic and Transportation Engineering
Vol1 6 No1 3 Sep t . 2006
文章编号 :167121637 (2006) 0320114204
基于数字图像技术的汽车行驶轨迹状态识别
Abstract : In order to mo nitor driver working states and vehicle t raveling co nditio ns at real time , t he recognitio n p ropert y of driving ro utes relative to road t raffic mark was analyzed by using t he images taken f ro m o n2board CCD image senso r , t he model s of per spective p rojectio n and vehicle t raveling ro utes recognitio n were established by image understanding and co mp uter visio n techniques , t he vehicleπs real t hree2dimensio nal po sitio ns relative to road t raffic mark f ro m t he dot s of planar images were co mp uted. Co mp utatio n result show s t hat vehicleπs calculatio n t raveling ro utes are coincident wit h realit y , so t hat driverπs so me peccancy behavior s , such as driving alo ng solid cent ral2line , driving acro ss solid cent ral line and driving alo ng co nver se roadway , can be decided correctly. 6 figs , 8 ref s. Key words : t raffic safet y ; driving stat us ; image under standing ; peccancy driving Author resume : Lin Guang2yu ( 19722) , female , doctoral st udent , 86229282334458 , l sgyu @to m. co m ; Wei Lang ( 19572) , male , PhD , p rofessor , 86229282334471 , langw001 @so hu. co m. 21 6 % 。驾驶员超速行驶 、 占道行驶、 无证驾驶、 酒后 驾驶、 疲劳驾驶是造成交通死亡事故的主要原因 ,其 中超速行驶、 占道行驶和疲劳驾驶造成的死亡人数占 251 3 % 。2004 年 ,全国共发生一次死亡 10 人以上群 死群伤特大道路交通事故 55 起 ,因超速行驶、 疲劳驾 驶、 违法超车等交通违法行为导致的特大事故 30 起 , 占 541 5 % 。减少由于驾驶员人为因素造成的交通事